Σχολή Τεχνολογικών Εφαρμογών. Τμήμα Αυτοματισμού. Σημειώσεις Εργαστηρίου Ψηφιακού Ελέγχου. Σχεδίαση Συστημάτων Ελέγχου με χρήση MATLAB
|
|
|
- Ἀγάπιος Αλεξόπουλος
- 10 χρόνια πριν
- Προβολές:
Transcript


1 Σχολή Τεχνολογικών Εφαρμογών Τμήμα Αυτοματισμού Σημειώσεις Εργαστηρίου Ψηφιακού Ελέγχου Σχεδίαση Συστημάτων Ελέγχου με χρήση MATLAB Επιμέλεια: Ξανθή Παπαγεωργίου Τμήματα: 16:00-18:00 & 18:00-0:00 Οκτώβρης 011




 και στη συνέχεια την τιμή που αυτή η")



, τον ανάστροφο του Α, ενώ για τον αντίστροφο του πίνακα Α αρκεί η εντολή >> inv(a).")
2 1. Εισαγωγή στο MATLAB Στην ενότητα αυτή θα κάνουμε μία εισαγωγή στις βασικές λειτουργίες του MATLAB. Θα δούμε ως ορίζουμε μεταβλητές (διανύσματα, πίνακες, πολυώνυμα, κλπ.), βασικές συναρτήσεις, πώς μπορούμε να δημιουργήσουμε εμείς συναρτήσεις, κα. Ξεκινώντας το πρόγραμμα βλέπουμε το μενού του προγράμματος, τη μπάρα των εργαλείων, τη γραμμή εντολών και μια σειρά από άλλα βοηθητικά παράθυρα, όπως φαίνεται και στο σχήμα. Το πιο βασικό παράθυρο από αυτά είναι η γραμμή εντολών στην οποία πληκτρολογούμε τις εντολές που θέλουμε να εκτελέσουμε και εκεί εμφανίζονται και τα αποτελέσματα των πράξεων-υπολογισμών που εκτελούμε. Για να ορίσουμε μία μεταβλητή αρκεί να πληκτρολογήσουμε στη γραμμή εντολών το όνομά της (το σύμβολό της) και στη συνέχεια την τιμή που αυτή η μεταβλητή παίρνει (π.χ. μεταβλητή x, a, b, κλπ.). Παρατηρήστε ότι για τη μεταβλητή b δεν συμβαίνει το ίδιο, διότι στο τέλος της εντολής έχει τοποθετηθεί το σύμβολο «;». Με αυτόν τον τρόπο καταχωρούμε τη μεταβλητή, χωρίς να γεμίζουμε την οθόνη μας με αυτήν την πληροφορία. Μενού Εργαλεία Current Directory Γραμμή Εντολών Command History Για να ορίσουμε τα διάνυσμα της μορφής y 1 3 πληκτρολογούμε: ενώ για να ορίσουμε το 1 x πληκτρολογούμε: 3 Επίσης, στη γραμμή εντολών μπορούμε να διενεργήσουμε πράξεις μεταξύ οποιονδήποτε μεταβλητών. Για παράδειγμα αν έχουμε ορίσει το διάνυσμα y, όπως παραπάνω, μπορούμε να εκτελέσουμε τις ακόλουθες πράξεις: y y, b y, c y /, d y *, καθώς επίσης και τις πράξεις: e y.*, f y.^, g y ^, h y./. Προσοχή στον πολλαπλασιασμό πινάκων! Ισχύει ο κανόνας που φαίνεται στο διπλανό σχήμα: Για να ορίσουμε πίνακες π.χ. Α (όπως δίνεται παρακάτω), τον ανάστροφο του Α, ενώ για τον αντίστροφο του πίνακα Α αρκεί η εντολή >> inv(a). A Για να υπολογίσουμε τις ιδιοτιμές ενός πίνακα μπορούμε να χρησιμοποιήσουμε την εντολή >> eig(a), ενώ για να βρούμε τις διαστάσεις ενός πίνακα αρκεί η εντολή >> size(a). Επίσης, μπορούμε να κατασκευάσουμε πίνακες οποιασδήποτε διάστασης γεμισμένους με μηδενικά: >> zeros(3,5), γεμάτους με άσσους: >> ones(5,10), και να ορίσουμε μοναδιαίους πίνακες: >> eye(5). Επιπλέον το MATLAB αποτελεί ένα πολύ ισχυρό εργαλείο για το χειρισμό πινάκων. Με πολύ απλές εντολές μπορούμε να απομονώσουμε υποπίνακες από κάποιον υπάρχοντα πίνακα. 1

, >> sin(pi), κλπ.")
, cos(x), tan(x), abs(x), sqrt(x), exp(x), log(x), κλπ.")



3 Σημαντικός είναι και ο αριθμός έτοιμων συναρτήσεων, ευρέως χρησιμοποιούμενες, που περιλαμβάνονται στο βασικό πακέτο του MATLAB. Για παράδειγμα ο υπολογισμός των τριγωνομετρικών αριθμών γίνεται από έτοιμες εντολές >> cos(pi/3), >> sin(pi), κλπ., όπου «pi» είναι το γνωστό σε όλους «π», καθώς επίσης και οι αντίστοιχες εντολές: >> cosd(60), κλπ., όπου παίρνουν σαν όρισμα τη γωνία σε μοίρες. Άλλες τέτοιες εντολές είναι: sin(x), cos(x), tan(x), abs(x), sqrt(x), exp(x), log(x), κλπ. Γενικά, αν κάποια συνάρτηση δεν γνωρίζουμε αν υπάρχει ή δεν είμαστε σίγουροι πώς συντάσσεται ή τι παίρνει για όρισμα, μπορούμε να χρησιμοποιήσουμε την εντολή: >> help cosd, ή αντίστοιχα την εντολή που μας ενδιαφέρει. Επίσης, το MATLAB μας δίνει τη δυνατότητα να δημιουργήσουμε τις δικές μας συναρτήσεις για τους επιμέρους υπολογισμούς που θέλουμε να πραγματοποιήσουμε. Η βασική λειτουργία μίας συνάρτησης είναι η εξής: δημιουργείς μία συνάρτηση με ένα συγκεκριμένο όνομα που εκτελεί μία σειρά από υπολογισμούς, δίνεις κάποια δεδομένα ως είσοδο έπειτα σε ένα μαύρο πλέον για σένα κουτί και παίρνεις μία σειρά από αποτελέσματα, χωρίς να χρειάζεται εσύ να κάνεις οποιονδήποτε ενδιάμεσο υπολογισμό. Ας δούμε ένα πολύ απλό παράδειγμα μιας συνάρτησης. Θα επιλύσουμε το γνωστό σε όλους τριώνυμο με τη χρήση της διακρίνουσας. Στον editor του MATLAB δημιουργούμε ένα αρχείο πληκτρολογώντας όλες τις απαραίτητες εντολές, όπως φαίνεται στο διπλανό σχήμα: Αφού αποθηκεύσουμε το αρχείο αυτό θα επιλύσουμε το τριώνυμο x x 1 0. Πληκτρολογούμε αρχικά τα δεδομένα μας που θα χρησιμοποιηθούν ως είσοδος στη συνάρτησή μας, και στη συνέχεια καλούμε τη συνάρτηση με την παρακάτω εντολή. Για τη δημιουργία πιο περίπλοκων συναρτήσεων, το MATLAB μας δίνει τη δυνατότητα να χρησιμοποιήσουμε εντολές ελέγχου με τη χρήση της εντολής >> if, ή εντολές για τη διενέργεια επαναληπτικών διαδικασιών με την εντολή >> for. Λεπτομέρειες σχετικά με τη σύνταξη και τη χρήση αυτών των συναρτήσεων μπορούμε να αντλήσουμε μέσω της εντολής >> help if ή >> help for, κλπ., όπως έχουμε αναφέρει και παραπάνω. Επίσης, μία άλλη πολύ χρήσιμη λειτουργία του MATLAB για τις εφαρμογές μας, σχετίζεται με τον ορισμό και τη διαχείριση πολυωνύμων. Ας δούμε μερικά παραδείγματα για το πώς μπορούμε να κάνουμε κάτι τέτοιο. Για να ορίσουμε το πολυώνυμο x x x, αρκεί στο MATLAB να εισάγουμε ένα διάνυσμα μόνο με τους συντελεστές των όρων του πολυωνύμου. Συγκεκριμένα εδώ πρέπει να εκτελέσουμε την εντολή: >> p1 = [ 1 - ]. Αντίστοιχα για 5 3 τον ορισμό του πολυωνύμου x x x, γράφουμε την εντολή: >> p = [ ]. Σχετικά με τα πολυώνυμα και πάλι έχουμε κάποιες έτοιμες εντολές που μπορούν να μας εξυπηρετήσουν στους υπολογισμούς μας. Για παράδειγμα στην εύρεση των ριζών ενός πολυωνύμου αρκεί η εντολή: >> roots(p). Επίσης, μία άλλη πολύ χρήσιμη εντολή του MATLAB σχετίζεται με τον πολλαπλασιασμό πολυωνύμων. Για 4 παράδειγμα αν υποθέσουμε ότι θέλουμε να πολλαπλασιάσουμε τα πολυώνυμα: 1 x x 1 και x 1. Το γινόμενο αυτών των δύο εφαρμόζοντας την επιμεριστική ιδιότητα και την αναγωγή ομοίων όρων, μας δίνει το πολυώνυμο: x x x x x 1. Για να εκτελέσουμε αυτήν τη πράξη με τη χρήση του MATLAB πρέπει πρώτα να ορίσουμε τα δύο αρχικά πολυώνυμα με τον τρόπο που είπαμε παραπάνω, δηλαδή να γράψουμε στη γραμμή εντολών: >> p1 = [ ], και >> p = [ ], και στη συνέχεια να χρησιμοποιήσουμε την έτοιμη εντολή του MATLAB:
, cos(x), tan(x), abs(x), sqrt(x), exp(x), log(x), κλπ.")

 και >> z = cos(*pi*x).")
4 . Γραφικές Παραστάσεις στο MATLAB Στην ενότητα αυτή θα κάνουμε μία εισαγωγή σε βασικές δυνατότητες που μας δίνει το MATLAB σχετικά με τη σχεδίαση γραφικών παραστάσεων και γραφικών απεικονίσεων γενικότερα. Θα δούμε κάποια παραδείγματα απλών γραφικών παραστάσεων όπως είναι το ημίτονο και το συνημίτονο. Παράγουμε 100 δεδομένα από το 0 ως 1 στη μεταβλητή x με την εντολή: >> x = linspace ( 0, 1, 100 ). Και στη συνέχεια με αυτά τα ορίσματα υπολογίζουμε τα ημίτονα και τα συνημίτονα: >> y = sin(*pi*x) και >> z = cos(*pi*x). Για να φτιάξουμε τη γραφική παράσταση του ημιτόνου αρκεί η εντολή: >> plot ( x, y ) και μας δίνει το αποτέλεσμα του αριστερά σχήματος παρακάτω. Προκειμένου να απεικονίσουμε και το συνημίτονο στο ίδιο γράφημα ώστε να μπορούμε να κάνουμε τη σύγκριση, πρέπει να χρησιμοποιήσουμε την εντολή >> hold on, με την οποία παγώνει το τρέχων γράφημα και πάνω σε αυτό προστίθεται και το καινούριο πληκτρολογώντας με τον ίδιο ακριβώς τρόπο την εντολή >> plot ( x, z ), και παίρνουμε το αποτέλεσμα του μεσαίου σχήματος παραπάνω. Επίσης, το MATLAB μας δίνει πολλές δυνατότητες να παίξουμε με τις χρωματικές αποχρώσεις, τα σύμβολα κλπ., έτσι ώστε να δημιουργήσουμε εντυπωσιακά και χρήσιμα γραφικά. Για παράδειγμα μπορούμε να αλλάξουμε τις γραμμές και τα σύμβολα ων σημείων με την απλή εντολή: >> plot ( x, y, ro ). Με την εντολή αυτή σε κάθε σημείο της καμπύλης τοποθετούμε κόκκινα κυκλάκια (όπως φαίνεται και στο δεξιά σχήμα παραπάνω). Για να δούμε την γκάμα των εντολών που μπορούμε να χρησιμοποιήσουμε στο MATLAB για τη δημιουργία γραφικών παραστάσεων, αρκεί να πληκτρολογήσουμε την εντολή που μάθαμε παραπάνω για να ανακαλύψουμε τις δυνατότητες της εντολής plot: >> help plot. Ενδεικτικά δείτε το διπλανό πίνακα. Επιπλέον, έχουμε μια σειρά από δυνατότητες εμπλουτισμού των γραφικών μας παραστάσεων πέραν των χρωματικών και συμβολικών επιλογών. Μπορούμε να τοποθετήσουμε επικεφαλίδες, τίτλους στους άξονες, κάποιο επεξηγηματικό κείμενο μέσα στο χώρο της γραφικής απεικόνισης σε συγκεκριμένη θέση, να εισάγουμε πλέγμα ώστε να είναι πιο εύκολη η αναγνώριση και ανάγνωση των δεδομένων που αναπαριστώνται, και άλλα πολλά. Ενδεικτικά κάποιες εντολές που δημιουργούν τα παραπάνω είναι: o Εισαγωγή τίτλου στο γράφημα: >> title ( Trigonometria ) o Εισαγωγή τίτλων στους άξονες: >> xlabel ( Time ) και >> ylabel ( Sin & Cos ) o Τοποθέτηση κειμένου σε συγκεκριμένη θέση του γραφήματος: >> text ( 0.6, 0.6, TEST ) o Εισαγωγή πλέγματος: >> grid on Τα αποτελέσματα που παράγουν αυτές οι εντολές πάνω στο γράφημα, απεικονίζονται στο παρακάτω σχήμα. 3
 και >> z = cos(*pi*x).")


5 Όλες αυτές οι εντολές μπορούν να παρακαμφθούν εύκολα με τη χρήση του παραθυρικού μενού που παρέχει το MATLAB. Συγκεκριμένα από το μενού του παραθύρου του γραφήματος ακολουθώντας τις επιλογές που δείχνει η παρακάτω εικόνα, μας ανοίγει ένα μενού ιδιοτήτων του γραφήματος, μέσα από το οποίο μπορούμε να μεταβάλλουμε όλες τις παραμέτρους του γραφήματος με πολύ απλό και εύκολο τρόπο. 4

 και την περιγραφή τους στο πεδίο των συχνοτήτων (συναρτήσεις μεταφοράς).")

6 3. Μοντελοποίηση Γραμμικών Συστημάτων στο MATLAB Στην ενότητα αυτή θα κάνουμε μία εισαγωγή σε βασικές έννοιες που σχετίζονται με την περιγραφή γραμμικών, χρονικά μη μεταβαλλόμενων συστημάτων με τη χρήση του MATLAB. Συγκεκριμένα θα αναλύσουμε την περιγραφή των συστημάτων αυτών στο πεδίο του χρόνου (χώρος κατάστασης) και την περιγραφή τους στο πεδίο των συχνοτήτων (συναρτήσεις μεταφοράς). Ένα τέτοιο σύστημα περιγράφεται από τις εξισώσεις: x A x B u y C x D u όπου x: είναι το διάνυσμα των μεταβλητών κατάστασης, y: είναι το διάνυσμα των μετρήσιμων μεταβλητών, u: είναι το διάνυσμα των μεταβλητών ελέγχου και Α, Β, C, D είναι οι παράμετροι του συστήματος. Ας εξετάσουμε το απλό ηλεκτρικό σύστημα του διπλανού σχήματος. Στο σύστημα αυτό το διάνυσμα των μεταβλητών κατάστασης είναι: x x it () 1 () t x i() t dt, u ( t ) e ( t ) είναι η μεταβλητή ελέγχου και y( t) R i( t) είναι η μετρήσιμη μεταβλητή. Η εξίσωση που το περιγράφει είναι: di( t) 1 L Ri( t) i( t) dt e( t). Για να περιγράψουμε το σύστημα αυτό με τη dt c μορφή των εξισώσεων κατάστασης πρέπει να προσδιορίσουμε τις παραμέτρους Α, Β, C, D. Η παραπάνω εξίσωση του συστήματος μπορεί να γραφεί: 1 1 R 1 Lx1 Rx1 x u x1 u x1 x. c L L cl Επίσης ισχύει: x i( t) x1 x 1 x1 0 x 0 u και y( t) R x1 0 x 0 u. Επομένως, οι εξισώσεις κατάστασης του συστήματος έχουν τη διπλανή μορφή, όπου προσδιορίζονται οι πίνακες Α, Β, C, D των παραμέτρων του συστήματος. Για συγκεκριμένες τιμές των παραμέτρων του ηλεκτρικού κυκλώματος R=1, L=1 και c=1, μπορούμε να ορίσουμε τους πίνακες Α, Β, C, D στο MATLAB. Στη συνέχεια με χρήση κατάλληλης εντολής μπορούμε να δηλώσουμε στο MATLAB ότι οι πίνακες αυτοί αντιστοιχούν σε περιγραφή του συστήματος στο χώρο κατάστασης. Η απαιτούμενη εντολή είναι η ss: (State Space) συνάρτηση του χώρου κατάστασης και συντάσσεται σε αντιστοιχία με όλες τις συναρτήσεις του MATLAB που έχουμε δει ως τώρα. Μία άλλη περιγραφή ενός συστήματος είναι η συνάρτηση μεταφοράς. Για να υπολογίσουμε τη συνάρτηση μεταφοράς χρησιμοποιούμε το μετασχηματισμό Laplace. Στο συγκεκριμένο παράδειγμα του ηλεκτρικού κυκλώματος που εξετάσαμε παραπάνω, ο μετασχηματισμός Laplace της διαφορικής εξίσωσης του συστήματος μας δίνει: Is ( ) 1 Ys () sli( s) RI( s) E( s) sl R I( s) E( s). Η συνάρτηση μεταφοράς γενικά ορίζεται ως: Gs () και sc sc Rs () RI () s RCs επομένως προκύπτει G s G() s. Για να ορίσουμε τη συνάρτηση αυτή στο MATLAB, αρκεί E( s) LCs RCs 1 να προσδιορίσουμε τα πολυώνυμα αριθμητή (ar) και παρονομαστή (par) και στη συνέχεια να δηλώσουμε ότι πρόκειται για συνάρτηση μεταφοράς με την απαιτούμενη εντολή που είναι η tf: (Transfer Function) συνάρτηση μεταφοράς και συντάσσεται σε αντιστοιχία με όλες τις συναρτήσεις του MATLAB που έχουμε δει ως τώρα. Το MATLAB μας δίνει τη δυνατότητα να πηγαίνουμε από τη μία περιγραφή στην άλλη με χρήση μίας εντολής. Στο σχήμα παρακάτω, φαίνεται η διάκριση μεταξύ των δύο περιγραφών και ο τρόπος μεταπήδησης από τη μία στην άλλη. 5






7 Επίσης, το MATLAB μας δίνει τη δυνατότητα με εντολές να χειριστούμε δομικά διαγράμματα για το σχεδιασμό συστημάτων ελέγχου. Για μπλοκ διαγράμματα που βρίσκονται σε σειρά ισχύει η εντολή: Για μπλοκ διαγράμματα που βρίσκονται παράλληλα ισχύει η εντολή: Για μπλοκ διαγράμματα σε συστήματα με ανάδραση ισχύει η εντολή: 6

 t, u ( t ) ( ) x xt xt F t είναι η μεταβλητή ελέγχου και y( t) x( t) η μετρήσιμη μεταβλητή.")
 x x1 0 x1 1 x 0 u και y( t) x( t) y( t) 1 x1 0 x 0 u.")

 t h t, u( t) F ( t) είναι η μεταβλητή ελέγχου και y( t) h( t) η μετρήσιμη μεταβλητή.")
8 Ας εξετάσουμε το παράδειγμα του πολύ απλού μηχανικού συστήματος του διπλανού σχήματος. Στο σύστημα αυτό το διάνυσμα των μεταβλητών κατάστασης είναι: x x 1 () t, u ( t ) ( ) x xt xt F t είναι η μεταβλητή ελέγχου και y( t) x( t) η μετρήσιμη μεταβλητή. Η εξίσωση που το περιγράφει είναι: F k x b x m x. Για να περιγράψουμε το σύστημα αυτό με τη μορφή των εξισώσεων κατάστασης πρέπει να προσδιορίσουμε τις παραμέτρους Α, Β, C, D. Η παραπάνω εξίσωση του συστήματος μπορεί 1 k b να γραφεί: u k x1 b x m x x u x1 x m m m. Επίσης ισχύει: x1 x( t) x x1 0 x1 1 x 0 u και y( t) x( t) y( t) 1 x1 0 x 0 u. Επομένως, οι εξισώσεις κατάστασης του συστήματος έχουν τη διπλανή μορφή, όπου προσδιορίζονται οι πίνακες Α, Β, C, D των παραμέτρων του συστήματος. Για συγκεκριμένες τιμές των παραμέτρων του μηχανικού συστήματος k=0, b=10 και m=1, μπορούμε να ορίσουμε τους πίνακες Α, Β, C, D στο MATLAB και στη συνέχεια με χρήση της κατάλληλης εντολής μπορούμε να δηλώσουμε στο MATLAB ότι οι πίνακες αυτοί αντιστοιχούν σε περιγραφή συστήματος στο χώρο κατάστασης. Ένα άλλο παράδειγμα απλού συστήματος είναι το υδραυλικό σύστημα του διπλανού σχήματος. Στο σύστημα αυτό το διάνυσμα των μεταβλητών κατάστασης είναι: x () t h t, u( t) F ( t) είναι η μεταβλητή ελέγχου και y( t) h( t) η μετρήσιμη μεταβλητή. Η εξίσωση που το περιγράφει είναι: d A h t F in t F out t dt dh t dh t A Fin t c h t A Fin t c h t. Για να περιγράψουμε dt dt το σύστημα αυτό με τη μορφή των εξισώσεων κατάστασης πρέπει να προσδιορίσουμε τις παραμέτρους Α, Β, C, D. Η παραπάνω εξίσωση του συστήματος μπορεί να γραφεί: 1 c A x t u t c x t x t u t x t. Επίσης ισχύει: A A y( t) h( t) x( t) y( t) 1 x 0 u. Για συγκεκριμένες τιμές των παραμέτρων του υδραυλικού συστήματος c=1 και Α=1, μπορούμε να ορίσουμε τους πίνακες Α, Β, C, D στο MATLAB και στη συνέχεια με χρήση της κατάλληλης εντολής μπορούμε να δηλώσουμε στο MATLAB ότι οι πίνακες αυτοί αντιστοιχούν σε περιγραφή συστήματος στο χώρο κατάστασης. in 7
 x x1 0 x1 1 x 0 u και y( t) x( t) y( t) 1 x1 0 x 0 u.")

 ή >> impulse ( sys_tf_c ) Επιπρόσθετα, τo MATLAB μας δίνει τη δυνατότητα να μελετήσουμε τη συμπεριφορά ενός συστήματος σε μία τυχαία")
9 4. Μελέτη Δυναμικής Συμπεριφοράς Γραμμικών Συστημάτων στο MATLAB Στην ενότητα αυτή θα κάνουμε μία εισαγωγή σε βασικές έννοιες που σχετίζονται με τη μελέτη της δυναμικής συμπεριφοράς γραμμικών χρονικά μη μεταβαλλόμενων συστημάτων με τη χρήση του MATLAB. Μπορούμε να εξετάσουμε την απόκριση του συστήματος σε βηματική είσοδο μέσω της εντολής: >> step( sys_ss_c ) ή >> step( sys_tf_c ) Επίσης, μπορούμε να εξετάσουμε την απόκριση του συστήματος σε κρουστική είσοδο με χρήση της εντολής: >> impulse( sys_ss_c ) ή >> impulse ( sys_tf_c ) Επιπρόσθετα, τo MATLAB μας δίνει τη δυνατότητα να μελετήσουμε τη συμπεριφορά ενός συστήματος σε μία τυχαία είσοδο, μέσω της εντολής: >> lsim( sys_ss_c, u, t ) ή >> lsim ( sys_tf_c, u, t ) όπου u είναι το διάνυσμα των στοιχείων της τυχαίας είσοδου και t το χρονικό διάστημα της προσομοίωσης. Για να δούμε ένα απλό παράδειγμα ας δημιουργήσουμε για >> t = 0 : 0.1 : 5 μία τυχαία είσοδο, ας πούμε μία ημιτονοειδή είσοδο >> u = sin( *pi*t ). Η απόκριση του συστήματος σε αυτήν την είσοδο παράγεται με την εντολή: >> lsim( sys_ss_c, u, t ). 8
 ή >> impulse ( sys_tf_c ) Επιπρόσθετα, τo MATLAB μας δίνει τη δυνατότητα να μελετήσουμε τη συμπεριφορά ενός συστήματος σε μία τυχαία")

 παίρνουμε το διάγραμμα s s 1 BODE του διπλανού σχήματος.")


.")

10 5. Μελέτη Γραμμικών Συστημάτων στο Πεδίο των Συχνοτήτων (BODE) Στην ενότητα αυτή θα κάνουμε μία εισαγωγή σε βασικές έννοιες που σχετίζονται με τη μελέτη των γραμμικών χρονικά μη μεταβαλλόμενων συστημάτων στο πεδίο των συχνοτήτων με τη χρήση του MATLAB. Για το σχεδιασμό διαγραμμάτων BODE με τη βοήθεια του MATLAB χρειαζόμαστε την εντολή >> bode(sys_ss_c) ή >> bode (sys_tf_c), αναλόγως τη μορφή του συστήματος το οποίο θέλουμε να εξετάσουμε. Για ένα απλό παράδειγμα συστήματος με 1 συνάρτηση μεταφοράς Gs () παίρνουμε το διάγραμμα s s 1 BODE του διπλανού σχήματος. Σημαντικό στοιχείο μελέτης ενός συστήματος με τη χρήση των διαγραμμάτων BODE είναι ο προσδιορισμός των περιθωρίων κέρδους και φάσης του συστήματος. Το περιθώριο κέρδους καθορίζεται από το διάγραμμα BODE ως εξής: Στο διάγραμμα της φάσης βρίσουμε τη συχνότητα ω 1 στην οποία η καμπύλη τέμνει τις -180 ο. Για αυτήν τη συχνότητα εξετάζουμε στο διάγραμμα του μέτρου πόσο απέχει η καμπύλη από τα 0dB. Αυτό είναι το περιθώριο κέρδους σε db και ισχύει ότι K db 0log G. g Αντίστοιχα για το περιθώριο φάσης πάμε στο διάγραμμα του μέτρου και βλέπουμε σε ποια συχνότητα ω η καμπύλη τέμνει τα 0dB. Για αυτήν τη συχνότητα πάμε στο διάγραμμα της φάσης και εξετάζουμε πόσο απέχει η καμπύλη από τις -180 ο. Αυτό καθορίζει το περιθώριο της φάσης. Για να εξάγουμε αυτά τα περιθώρια με τη βοήθεια του MATLAB μπορούμε να χρησιμοποιήσουμε την εντολή: >> [ Gm, Pm, wg, wp ] = margin( sys_tf_c ). Ένα πολύ χρήσιμο εργαλείο του MATLAB είναι ο LTI viewer, ο οποίος καλείται με την εντολή: >> ltiview. Με την εντολή αυτή μας ανοίγει ένα παράθυρο και μέσα από ένα εύχρηστο μενού μπορούμε να εισάγουμε το σύστημά μας και να το μελετήσουμε. Δείτε ένα από παράδειγμα εισαγωγής (File->Import) και εξέτασης ενός συστήματος με την ακολουθία των βημάτων που εμφανίζονται στις παρακάτω εικόνες. Μας δίνεται η δυνατότητα να το μελετήσουμε σε κάποια απόκριση, να δούμε το διάγραμμα BODE κλπ., (πατάμε δεξί κλικ και επιλέγουμε από Plot Types) και μια σειρά από χαρακτηριστικά του συστήματος πολύ εύκολα και γρήγορα (δεξί κλικ από Plot Characteristics και να επιλέξουμε για παράδειγμα σε ένα διάγραμμα BODE να μας εμφανίσει τα περιθώρια κέρδους και φάσης). 9
 παίρνουμε το διάγραμμα s s 1 BODE του διπλανού σχήματος.")




.")
11 Ας δούμε τώρα ένα παράδειγμα ενός συστήματος με νεκρό χρόνο στην απόκρισή του στις μεταβολές της εισόδου. Στο διπλανό σχήμα φαίνεται ένας αγωγός μέσα στον οποίο κινείται αέρας με κάποια ταχύτητα v σταθερή και σε κάποιο σημείο μέσα στον αγωγό ο αέρας θερμαίνεται. Η μέτρηση της θερμοκρασίας γίνεται κατά την έξοδο του αέρα από τον αγωγό και σε κάποια απόσταση από το σημείο θέρμανσης. Ο ελεγκτής της θερμοκρασίας που ρυθμίζει τη θέρμανση του αέρα είναι αναμενόμενο να έχει διαφοροποιημένη ένδειξη σε σχέση με την πραγματική μεταβολή της θερμοκρασίας κατά τη θέρμανση του αέρα κατά ένα χρονικό διάστημα d=l/v. Η συνάρτηση μεταφοράς k ds αυτού του συστήματος με νεκρό χρόνο είναι: G s e και για να μπορέσουμε να τη δηλώσουμε στο MATLAB s 1 χρειαζόμαστε την εντολή: >> sys_tf_c = tf ( ar, par, outputdelay, d). Δοκιμάστε να εισάγεται το σύστημα αυτό στο MATLAB για μεταβλητές k=1, τ=1, και d=0,5. Με τη χρήση του LTI viewer μπορούμε να δούμε την απόκριση του συστήματος σε βηματική είσοδο, καθώς και το διάγραμμα BODE για το σύστημα αυτό. Τα αποτελέσματα απεικονίζονται στις παρακάτω εικόνες. 10



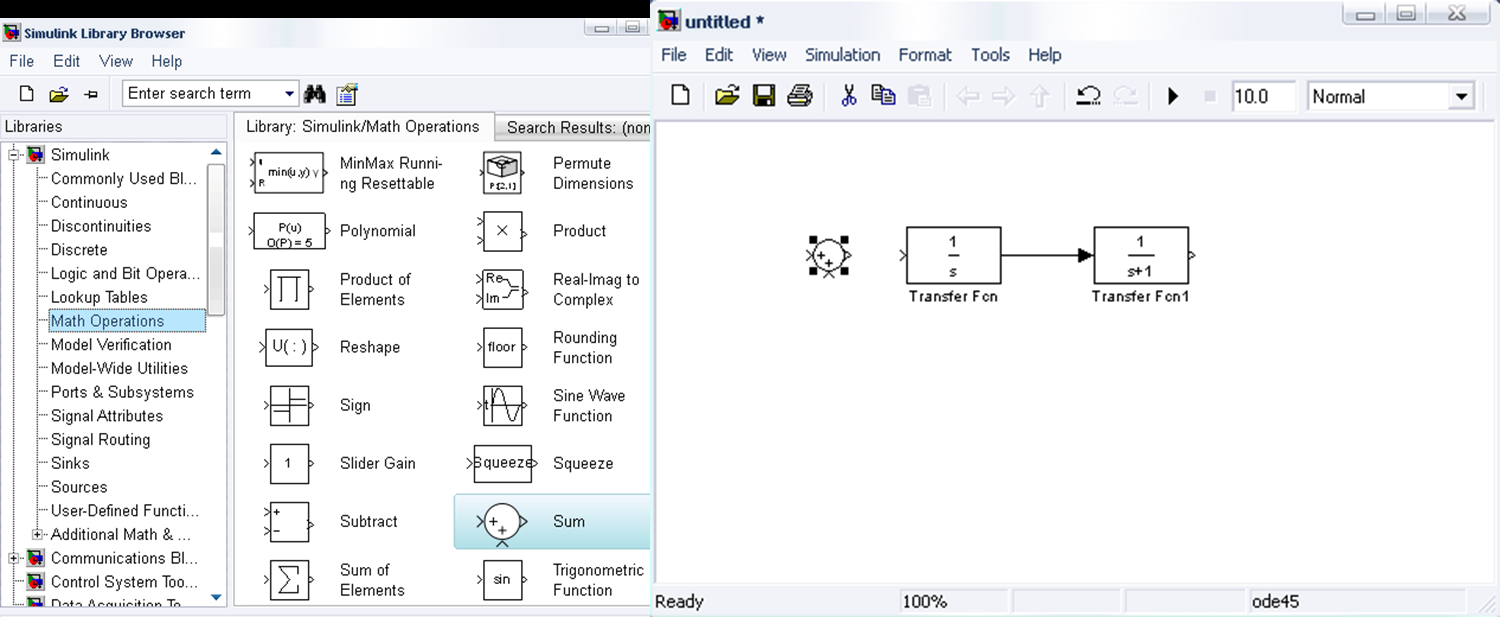
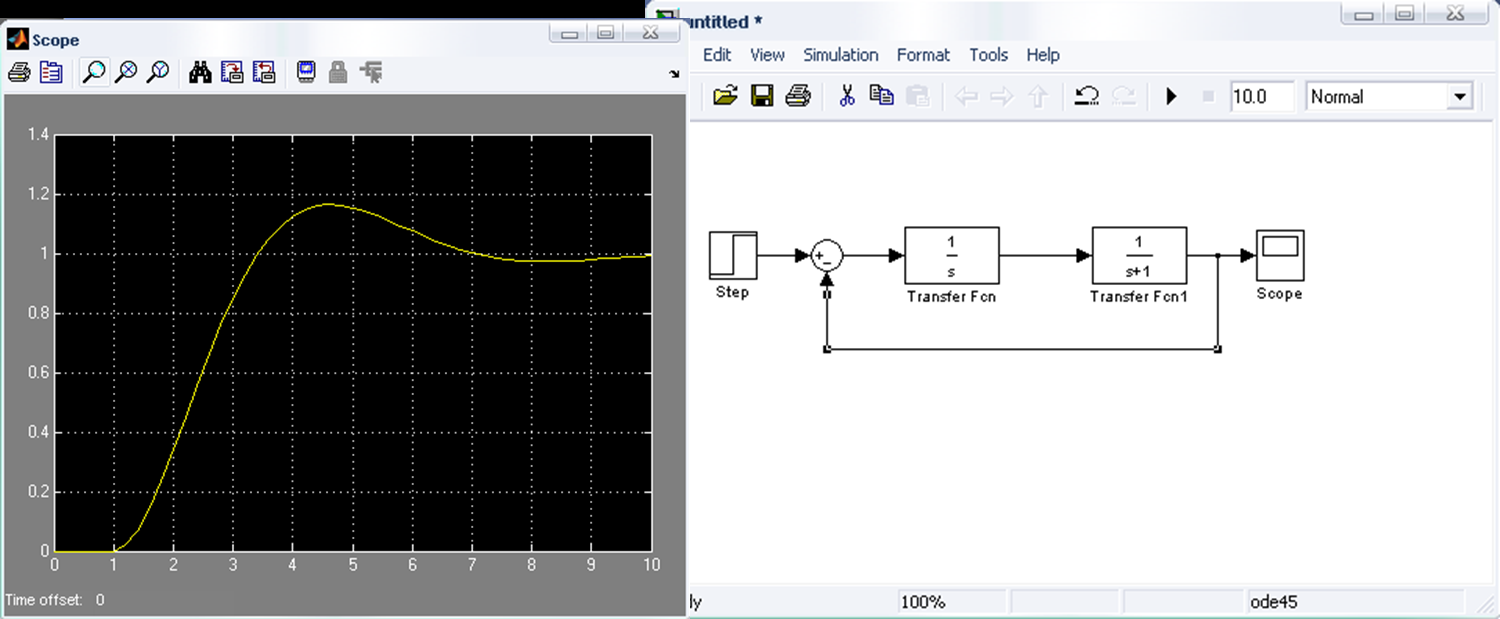
12 6. Εισαγωγή στο Simulink Στην ενότητα αυτή θα κάνουμε μία εισαγωγή σε βασικές έννοιες του Simulink που περιέχει το MATLAB. Το Simulink μας δίνει τη δυνατότητα να φτιάξουμε εύκολα και γρήγορα μοντέλα συστημάτων ώστε να μπορούμε να δοκιμάσουμε τη συμπεριφορά τους. Για να ξεκινήσουμε το Simulink στη γραμμή εντολών του MATLAB πληκτρολογούμε την εντολή: >> simulink. Ανοίγει ένα μενού από επιλογές ώστε να μπορούμε να σχεδιάσουμε το σύστημα που μας ενδιαφέρει κάθε φορά. Ας υποθέσουμε ότι θέλουμε να φτιάξουμε το μοντέλο του συστήματος κλειστού βρόγχου που φαίνεται στο παρακάτω σχήμα, όπου η συνάρτηση μεταφοράς του προς έλεγχο συστήματος είναι: Gs () 1 s 1 και η συνάρτηση K μεταφοράς του ελεγκτή είναι: Gc () s s. Για να φτιάξουμε το μοντέλο αυτό στο Simulink ανοίγουμε ένα καινούριο αρχείο και το σχεδιάζουμε βήμα προς βήμα. Εισάγουμε τις συναρτήσεις μεταφοράς και ρυθμίζουμε ανάλογα τις παραμέτρους με βάση τα δεδομένα μας και στη συνέχεια ακολουθώντας την αλληλουχία των παρακάτω εικόνων παίρνουμε το ολοκληρωμένο μοντέλο και ορίζουμε το σύστημα κλειστού βρόγχου να πάρει μια βηματική είσοδο. Για διάφορες τιμές του κέρδους Κ του ελεγκτή εξετάζουμε τη συμπεριφορά και την απόκριση του συστήματός μας. Παρακάτω εμφανίζεται η απόκριση του συστήματος για κέρδος Κ=1, Κ=3 και Κ=30. 11



13 1

14 13


 ακολουθούμε τα εξής βήματα.")
 s e.")

15 7. Βαθμονόμηση PID Ελεγκτών Στην ενότητα αυτή θα κάνουμε μία εισαγωγή σε βασικές έννοιες που σχετίζονται με τη σχεδίαση και βαθμονόμηση PID ελεγκτών με τη χρήση του MATLAB. Η τυπική μορφή ενός PID ελεγκτή είναι u t u 0 P t I t D t, όπου ο πρώτος όρος σχετίζεται με τις αρχικές συνθήκες. Ο δεύτερος όρος περιγράφει το αναλογικό μέρος του ελεγκτή και είναι της μορφής Ο τρίτος όρος περιγράφει το ολοκληρωτικό μέρος του ελεγκτή και είναι της μορφής όρος περιγράφει το διαφορικό μέρος του ελεγκτή και είναι της μορφής D t kc D Για το σχεδιασμό του κατάλληλου ελεγκτή (κατάλληλη επιλογή των αντίστοιχων παραμέτρων) ακολουθούμε τα εξής βήματα. Αρχικά προσδιορίζουμε τα κρίσιμα μεγέθη του συστήματος (κρίσιμη συχνότητα και κρίσιμο κέρδος) και από εκεί εξάγουμε τις απαραίτητες πληροφορίες για το σύστημα που θέλουμε να ελέγξουμε. k P t kc e t. t c I t e d. Ο τελευταίος t0 I de t dt. Ας εξετάσουμε ένα παράδειγμα του συστήματος που φαίνεται στο διπλανό σχήμα, όπου το σύστημα έχει συνάρτηση μεταφοράς 1 0.5s G() s e. Για το σύστημα αυτό με τη βοήθεια του s 1 διαγράμματος BODE προκύπτουν τα κρίσιμα μεγέθη: 3.67 K 3.80 και επομένως προκύπτει και η περίοδος P cr Ας δούμε ένα χρήσιμο πίνακα για τη βαθμονόμηση κατάλληλων ελεγκτών στηριγμένο πάνω στη μέθοδο Ziegler- Nichols. Ο πίνακας αυτός μας δίνει τους εμπειρικούς τύπους υπολογισμών των αντίστοιχων παραμέτρων των απαιτούμενων μερών του παραπάνω ελεγκτή για τις περιπτώσεις σχεδιασμού ελεγκτών P, PI, PID. cr cr, Άρα για να σχεδιάσουμε έναν PID ελεγκτή πρέπει να εστιάσουμε στην τελευταία γραμμή του παραπάνω πίνακα και να προσδιορίσουμε τις τιμές των παραμέτρων αντίστοιχα. Στο μοντέλο του Simulink που μπορούμε να κατασκευάσουμε για να ελέγξουμε τον PID ελεγκτή που σχεδιάσαμε, αντικαθιστούμε το μπλοκ του ελεγκτή που μέχρι τώρα αποτελούνταν από μία απλή συνάρτηση μεταφοράς με ένα νέο μπλοκ που αντιστοιχεί στο συγκεκριμέν ο ελεγκτή μας, όπως φαίνεται στο διπλανό σχήμα. cr
 ακολουθούμε τα εξής βήματα.")

 ότι")



16 Εμείς καλούμαστε να ρυθμίσουμε και αυτήν τη φορά το μπλοκ αυτό στο μοντέλο του Simulink με τις κατάλληλες τιμές των παραμέτρων. Θέλει μια ιδιαίτερη προσοχή πώς εισάγουμε αυτές τις παραμέτρους. Συγκεκριμένα πρέπει να προσέξουμε τη μορφή που μας δηλώνει το Simulink (διπλανό σχήμα) ότι πρέπει να του δώσουμε τα δεδομένα. Ας ξεκινήσουμε με τη δήλωση του αναλογικού μέρους του ελεγκτή. Αυτό μπαίνει ως έχει με βάση τους υπολογισμούς μας στο πεδίο Proportional. Για το ολοκληρωτικό μέρος του ελεγκτή απαιτείται ένας υπολογισμός όπως φαίνεται στο διπλανό σχήμα, και εισαγωγή του δεδομένου στο πεδίο Integral. Τέλος, για το διαφορικό μέρος του ελεγκτή ο υπολογισμός φαίνεται στο παρακάτω σχήμα και εισάγουμε το δεδομένο στο πεδίο Derivative. Επομένως, μετά τον κατάλληλο σχεδιασμό του ελεγκτή και με τη βοήθεια του μοντέλου στο Simulink παίρνουμε την απόκριση του συστήματος σε βηματκή είσοδο όπως στο παρακάτω σχήμα. 15

ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ. Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου
 ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Οκτώβριος 011 MATLAB
ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Οκτώβριος 011 MATLAB
2014 Παρίσης Κ., Καθηγητής
 Είναι μια προέκταση του Matlab με την δυνατότητα μοντελοποίησης, προσομοίωσης και ανάλυσης συστημάτων μέσω ενός γραφικού περιβάλλοντος χρήστη (GUI). Η κατασκευή ενός μοντέλου είναι πολύ απλή και γρήγορη
Είναι μια προέκταση του Matlab με την δυνατότητα μοντελοποίησης, προσομοίωσης και ανάλυσης συστημάτων μέσω ενός γραφικού περιβάλλοντος χρήστη (GUI). Η κατασκευή ενός μοντέλου είναι πολύ απλή και γρήγορη
Εργαστήριο Μαθηματικής Ανάλυσης Ι. Εισαγωγή στη Matlab Βασικές Συναρτήσεις-Γραφικές παραστάσεις. Πανεπιστήμιο Θεσσαλίας. Σχολή Θετικών Επιστημών
 Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με εφαρμογές στη Βιοϊατρική Εργαστήριο Μαθηματικής Ανάλυσης Ι Εισαγωγή στη Matlab Βασικές Συναρτήσεις-Γραφικές παραστάσεις Εισαγωγή στη
Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με εφαρμογές στη Βιοϊατρική Εργαστήριο Μαθηματικής Ανάλυσης Ι Εισαγωγή στη Matlab Βασικές Συναρτήσεις-Γραφικές παραστάσεις Εισαγωγή στη
Εισαγωγή στην Αριθμητική Ανάλυση
 Εισαγωγή στην Αριθμητική Ανάλυση Εισαγωγή στη MATLAB ΔΙΔΑΣΚΩΝ: ΓΕΩΡΓΙΟΣ ΑΚΡΙΒΗΣ ΒΟΗΘΟΙ: ΔΗΜΗΤΡΙΑΔΗΣ ΣΩΚΡΑΤΗΣ, ΣΚΟΡΔΑ ΕΛΕΝΗ E-MAIL: SDIMITRIADIS@CS.UOI.GR, ESKORDA@CS.UOI.GR Τι είναι Matlab Είναι ένα περιβάλλον
Εισαγωγή στην Αριθμητική Ανάλυση Εισαγωγή στη MATLAB ΔΙΔΑΣΚΩΝ: ΓΕΩΡΓΙΟΣ ΑΚΡΙΒΗΣ ΒΟΗΘΟΙ: ΔΗΜΗΤΡΙΑΔΗΣ ΣΩΚΡΑΤΗΣ, ΣΚΟΡΔΑ ΕΛΕΝΗ E-MAIL: SDIMITRIADIS@CS.UOI.GR, ESKORDA@CS.UOI.GR Τι είναι Matlab Είναι ένα περιβάλλον
ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ
 ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ ΣΚΟΠΟΣ ΤΗΣ ΑΣΚΗΣΗΣ Σημαντική πληροφορία για τη συμπεριφορά και την ευστάθεια ενός γραμμικού συστήματος, παίρνεται, μελετώντας την απόκρισή του
ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ ΣΚΟΠΟΣ ΤΗΣ ΑΣΚΗΣΗΣ Σημαντική πληροφορία για τη συμπεριφορά και την ευστάθεια ενός γραμμικού συστήματος, παίρνεται, μελετώντας την απόκρισή του
Δυναμική Μηχανών I. Διάλεξη 10. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
3) το παράθυρο Πίνακας τιμών όπου εμφανίζονται οι τιμές που παίρνουν οι παράμετροι
 το παράθυρο Πίνακας τιμών όπου εμφανίζονται οι τιμές που παίρνουν οι παράμετροι") Ο Δ Η Γ Ι Ε Σ Γ Ι Α Τ Ο M O D E L L U S 0.0 4. 0 5 Για να κατεβάσουμε το πρόγραμμα Επιλέγουμε Download στη διεύθυνση: http://modellus.co/index.php/en/download. Στη συνέχεια εκτελούμε το ModellusX_windows_0_4_05.exe
Ο Δ Η Γ Ι Ε Σ Γ Ι Α Τ Ο M O D E L L U S 0.0 4. 0 5 Για να κατεβάσουμε το πρόγραμμα Επιλέγουμε Download στη διεύθυνση: http://modellus.co/index.php/en/download. Στη συνέχεια εκτελούμε το ModellusX_windows_0_4_05.exe
ΣΑΕ 1. Σημειώσεις από τις παραδόσεις. Για τον κώδικα σε L A TEX, ενημερώσεις και προτάσεις: https://github.com/kongr45gpen/ece-notes
 ΣΑΕ Σημειώσεις από τις παραδόσεις Για τον κώδικα σε L A TEX, ενημερώσεις και προτάσεις: https://github.com/kongr45gpen/ece-notes Οκτώβριος-Ιανουάριος 207 Τελευταία ενημέρωση: 3 Οκτωβρίου 207 Συστήματα
ΣΑΕ Σημειώσεις από τις παραδόσεις Για τον κώδικα σε L A TEX, ενημερώσεις και προτάσεις: https://github.com/kongr45gpen/ece-notes Οκτώβριος-Ιανουάριος 207 Τελευταία ενημέρωση: 3 Οκτωβρίου 207 Συστήματα
Εισαγωγή στο Πρόγραμμα Maxima
 Εισαγωγή στο Πρόγραμμα Maxima Το Maxima είναι ένα πρόγραμμα για την εκτέλεση μαθηματικών υπολογισμών, συμβολικών μαθηματικών χειρισμών, αριθμητικών υπολογισμών και γραφικών παραστάσεων. Το Maxima λειτουργεί
Εισαγωγή στο Πρόγραμμα Maxima Το Maxima είναι ένα πρόγραμμα για την εκτέλεση μαθηματικών υπολογισμών, συμβολικών μαθηματικών χειρισμών, αριθμητικών υπολογισμών και γραφικών παραστάσεων. Το Maxima λειτουργεί
Δυναμική Μηχανών I. Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink
 Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Παραρτήματα. Παράρτημα 1 ο : Μιγαδικοί Αριθμοί
 Παράρτημα ο : Μιγαδικοί Αριθμοί Παράρτημα ο : Μετασχηματισμός Lplce Παράρτημα 3 ο : Αντίστροφος μετασχηματισμός Lplce Παράρτημα 4 ο : Μετασχηματισμοί δομικών διαγραμμάτων Παράρτημα 5 ο : Τυποποιημένα σήματα
Παράρτημα ο : Μιγαδικοί Αριθμοί Παράρτημα ο : Μετασχηματισμός Lplce Παράρτημα 3 ο : Αντίστροφος μετασχηματισμός Lplce Παράρτημα 4 ο : Μετασχηματισμοί δομικών διαγραμμάτων Παράρτημα 5 ο : Τυποποιημένα σήματα
Ανάλυση συστημάτων με χρήση μετασχηματισμού Laplace
 Ανάλυση συστημάτων με χρήση μετασχηματισμού Laplace. Ο Μετασχηματισμός Laplace Ο μετασχηματισμός Laplace μιας συνάρτησης f(t) δίνεται από τη σχέση: st L[ f ( t)] = F( = f ( t) e dt Η χρήση του μετασχηματισμού
Ανάλυση συστημάτων με χρήση μετασχηματισμού Laplace. Ο Μετασχηματισμός Laplace Ο μετασχηματισμός Laplace μιας συνάρτησης f(t) δίνεται από τη σχέση: st L[ f ( t)] = F( = f ( t) e dt Η χρήση του μετασχηματισμού
MATLAB. Εισαγωγή στο SIMULINK. Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής
 MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
Μαθηματική Εισαγωγή Συναρτήσεις
 Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας Διανύσματα Καστοριά,
Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας Διανύσματα Καστοριά,
Λύσεις θεμάτων Α εξεταστικής περιόδου εαρινού εξαμήνου (Ιούνιος 2015)
") Λύσεις θεμάτων Α εξεταστικής περιόδου εαρινού εξαμήνου 204 5 (Ιούνιος 205) ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος. α. Να προσδιοριστούν οι τιμές
Λύσεις θεμάτων Α εξεταστικής περιόδου εαρινού εξαμήνου 204 5 (Ιούνιος 205) ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος. α. Να προσδιοριστούν οι τιμές
Μαθηματική Εισαγωγή Συναρτήσεις
 Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς Καστοριά, Ιούλιος 14 A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας
Φυσικός Ραδιοηλεκτρολόγος (MSc) ο Γενικό Λύκειο Καστοριάς Καστοριά, Ιούλιος 14 A. Μαθηματική Εισαγωγή Πράξεις με αριθμούς σε εκθετική μορφή Επίλυση βασικών μορφών εξισώσεων Συναρτήσεις Στοιχεία τριγωνομετρίας
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER
 4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
Τοποθετήστε τη δισκέτα στο drive B και σε περιβάλλον MS-DOS πληκτρολογήστε: B:
 Συστήματα floppy disk Τοποθετήστε τη δισκέτα στο drive B και σε περιβάλλον MS-DOS πληκτρολογήστε: B: Συστήματα σκληρού δίσκου Οι χρήστες σκληρού δίσκου θα πρέπει να δημιουργήσουν ένα directory με το όνομα
Συστήματα floppy disk Τοποθετήστε τη δισκέτα στο drive B και σε περιβάλλον MS-DOS πληκτρολογήστε: B: Συστήματα σκληρού δίσκου Οι χρήστες σκληρού δίσκου θα πρέπει να δημιουργήσουν ένα directory με το όνομα
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 2015
 Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
1. ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB... 13
 ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ 1. ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB... 13 1.1. Τι είναι το Matlab... 13 1.2. Περιβάλλον εργασίας... 14 1.3. Δουλεύοντας με το Matlab... 16 1.3.1. Απλές αριθμητικές πράξεις... 16 1.3.2. Σχόλια...
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ 1. ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB... 13 1.1. Τι είναι το Matlab... 13 1.2. Περιβάλλον εργασίας... 14 1.3. Δουλεύοντας με το Matlab... 16 1.3.1. Απλές αριθμητικές πράξεις... 16 1.3.2. Σχόλια...
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ (Transfer function) ΜΑΘΗΜΑΤΙΚΑ ΜΟΝΤΕΛΑ ΣΥΣΤΗΜΑΤΩΝ Aναστασία Βελώνη Τμήμα Η.Υ.Σ
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : ΣΥΝΑΡΤΗΣΗ ΜΕΤΑΦΟΡΑΣ (Transfer function) ΜΑΘΗΜΑΤΙΚΑ ΜΟΝΤΕΛΑ ΣΥΣΤΗΜΑΤΩΝ Aναστασία Βελώνη Τμήμα Η.Υ.Σ
ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ
 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Εργαστηριακές Ασκήσεις με χρήση του λογισμικού Matlab ΣΚΟΠΟΣ: Σκοπός των εργαστηριακών ασκήσεων είναι η πλήρης μελέτη ενός συστήματος αυτομάτου ελέγχου. Για το λόγο αυτό, στη
ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Εργαστηριακές Ασκήσεις με χρήση του λογισμικού Matlab ΣΚΟΠΟΣ: Σκοπός των εργαστηριακών ασκήσεων είναι η πλήρης μελέτη ενός συστήματος αυτομάτου ελέγχου. Για το λόγο αυτό, στη
Εισαγωγή στη Matlab Βασικές Συναρτήσεις
 Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με Εφαρμογές στη Βιοϊατρική Εργαστήριο Γραμμικής Άλγεβρας Εισαγωγή στη Matlab Βασικές Συναρτήσεις 2016-2017 Εισαγωγή στη Matlab Matlab
Πανεπιστήμιο Θεσσαλίας Σχολή Θετικών Επιστημών Τμήμα Πληροφορικής με Εφαρμογές στη Βιοϊατρική Εργαστήριο Γραμμικής Άλγεβρας Εισαγωγή στη Matlab Βασικές Συναρτήσεις 2016-2017 Εισαγωγή στη Matlab Matlab
Oικονομικές και Mαθηματικές Eφαρμογές
 Το πακέτο ΕXCEL: Oικονομικές και Mαθηματικές Eφαρμογές Eπιμέλεια των σημειώσεων και διδασκαλία: Ευαγγελία Χαλιώτη* Θέματα ανάλυσης: - Συναρτήσεις / Γραφικές απεικονίσεις - Πράξεις πινάκων - Συστήματα εξισώσεων
Το πακέτο ΕXCEL: Oικονομικές και Mαθηματικές Eφαρμογές Eπιμέλεια των σημειώσεων και διδασκαλία: Ευαγγελία Χαλιώτη* Θέματα ανάλυσης: - Συναρτήσεις / Γραφικές απεικονίσεις - Πράξεις πινάκων - Συστήματα εξισώσεων
1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΠΕΙΡΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Εργαστήριο Επεξεργασία Εικόνας & Βίντεο 1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή Νικόλαος Γιαννακέας Άρτα 2018 1 Εισαγωγή Το Matlab
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΗΠΕΙΡΟΥ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. Εργαστήριο Επεξεργασία Εικόνας & Βίντεο 1 η Εργαστηριακή Άσκηση MATLAB Εισαγωγή Νικόλαος Γιαννακέας Άρτα 2018 1 Εισαγωγή Το Matlab
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 2015
 Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 20 ΘΕΜΑ Ο (4,0 μονάδες). Να προσδιοριστεί η συνάρτηση μεταφοράς / του συστήματος που περιγράφεται από το δομικό (λειτουργικό) διάγραμμα. (2,0
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 20 ΘΕΜΑ Ο (4,0 μονάδες). Να προσδιοριστεί η συνάρτηση μεταφοράς / του συστήματος που περιγράφεται από το δομικό (λειτουργικό) διάγραμμα. (2,0
Σήματα και Συστήματα. Διάλεξη 13: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 13: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace 1. Επίλυση Γραμμικών
Σήματα και Συστήματα Διάλεξη 13: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace 1. Επίλυση Γραμμικών
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
ΗΛΕΚΤΡΟΝΙΚΗ Ι ΔΙΑΓΡΑΜΜΑΤΑ BODE ΣΥΜΠΛΗΡΩΜΑΤΙΚΟ ΤΕΥΧΟΣ ΣΗΜΕΙΩΣΕΩΝ
 Ε. Μ. Πολυτεχνείο Εργαστήριο Ηλεκτρονικής ΗΛΕΚΤΡΟΝΙΚΗ Ι ΔΙΑΓΡΑΜΜΑΤΑ BODE ΣΥΜΠΛΗΡΩΜΑΤΙΚΟ ΤΕΥΧΟΣ ΣΗΜΕΙΩΣΕΩΝ Γ. ΠΑΠΑΝΑΝΟΣ ΠΑΡΑΡΤΗΜΑ : Συναρτήσεις Δικτύων Βασικοί ορισμοί Ας θεωρήσουμε ένα γραμμικό, χρονικά
Ε. Μ. Πολυτεχνείο Εργαστήριο Ηλεκτρονικής ΗΛΕΚΤΡΟΝΙΚΗ Ι ΔΙΑΓΡΑΜΜΑΤΑ BODE ΣΥΜΠΛΗΡΩΜΑΤΙΚΟ ΤΕΥΧΟΣ ΣΗΜΕΙΩΣΕΩΝ Γ. ΠΑΠΑΝΑΝΟΣ ΠΑΡΑΡΤΗΜΑ : Συναρτήσεις Δικτύων Βασικοί ορισμοί Ας θεωρήσουμε ένα γραμμικό, χρονικά
Βιομηχανικοί Ελεγκτές
 Βιομηχανικοί Ελεγκτές Σημειώσεις Εργαστηρίου Έλεγχος Στάθμης Δοχείου με P.I.D. Ελεγκτή Περιεχόμενα 1. Τρόπος Εισαγωγής στο πρόγραμμα εξομοίωσης. 2. Τρόπος λειτουργίας εξομοιωτή. 3. Αναγνώριση ιδιοτήτων
Βιομηχανικοί Ελεγκτές Σημειώσεις Εργαστηρίου Έλεγχος Στάθμης Δοχείου με P.I.D. Ελεγκτή Περιεχόμενα 1. Τρόπος Εισαγωγής στο πρόγραμμα εξομοίωσης. 2. Τρόπος λειτουργίας εξομοιωτή. 3. Αναγνώριση ιδιοτήτων
Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου
 Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου 203 4 ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος ελέγχου κλειστού βρόχου. α. Να προσδιοριστεί
Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου 203 4 ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος ελέγχου κλειστού βρόχου. α. Να προσδιοριστεί
Γ ΛΥΚΕΙΟΥ ΚΥΜΑΤΑ ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ. Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός.
 ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ ΚΥΜΑΤΑ Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός / Βασικές Έννοιες Η επιστήμη της Φυσικής συχνά μελετάει διάφορες διαταραχές που προκαλούνται και διαδίδονται στο χώρο.
ΦΥΣΙΚΗ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ Γ ΛΥΚΕΙΟΥ ΚΥΜΑΤΑ Επιμέλεια: ΑΓΚΑΝΑΚΗΣ A.ΠΑΝΑΓΙΩΤΗΣ, Φυσικός / Βασικές Έννοιες Η επιστήμη της Φυσικής συχνά μελετάει διάφορες διαταραχές που προκαλούνται και διαδίδονται στο χώρο.
Τυπικές χρήσεις της Matlab
 Matlab Μάθημα 1 Τι είναι η Matlab Ολοκληρωμένο Περιβάλλον Περιβάλλον ανάπτυξης Διερμηνευμένη γλώσσα Υψηλή επίδοση Ευρύτητα εφαρμογών Ευκολία διατύπωσης Cross platform (Wintel, Unix, Mac) Τυπικές χρήσεις
Matlab Μάθημα 1 Τι είναι η Matlab Ολοκληρωμένο Περιβάλλον Περιβάλλον ανάπτυξης Διερμηνευμένη γλώσσα Υψηλή επίδοση Ευρύτητα εφαρμογών Ευκολία διατύπωσης Cross platform (Wintel, Unix, Mac) Τυπικές χρήσεις
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #11: Ελεγκτές PID & Συντονισμός Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #11: Ελεγκτές PID & Συντονισμός Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : Μετασχηματισμός LAPLACE (Laplace Tranform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : Μετασχηματισμός LAPLACE (Laplace Tranform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Για τη δημιουργία ενός διανύσματος με στοιχεία από το 0 μέχρι το 20 με βήμα το 2 (χρησιμοποιείται συνήθως για διανύσματα χρόνου) δίνουμε
 δίνουμε") Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 η Εισαγωγή στο Matlab 1 Άσκηση 1 η : Εισαγωγή στο Matlab Αντικείμενο Εξοικείωση με τις βασικές λειτουργίες του Matlab (πρόγραμμα αριθμητικής ανάλυσης και
Εργαστήριο Συστημάτων Αυτομάτου Ελέγχου Άσκηση 1 η Εισαγωγή στο Matlab 1 Άσκηση 1 η : Εισαγωγή στο Matlab Αντικείμενο Εξοικείωση με τις βασικές λειτουργίες του Matlab (πρόγραμμα αριθμητικής ανάλυσης και
Σύντομες εισαγωγικές σημειώσεις για την. Matlab
 Σύντομες εισαγωγικές σημειώσεις για την Matlab Δήλωση Μεταβλητών Για να εισάγει κανείς δεδομένα στη Matlab υπάρχουν πολλοί τρόποι. Ο πιο απλός είναι στη γραμμή εντολών να εισάγουμε αυτό που θέλουμε και
Σύντομες εισαγωγικές σημειώσεις για την Matlab Δήλωση Μεταβλητών Για να εισάγει κανείς δεδομένα στη Matlab υπάρχουν πολλοί τρόποι. Ο πιο απλός είναι στη γραμμή εντολών να εισάγουμε αυτό που θέλουμε και
Συστήματα Αυτομάτου Ελέγχου
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
Δυναμική Μηχανών I. Διάλεξη 8. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 8 Χειμερινό Εξάμηνο 23 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Ανακοινώσεις To μάθημα MATLAB/simulink για όσους δήλωσαν συμμετοχή έως χθες θα γίνει στις 6//24: Office Hours: Δευτέρα -3 μμ,
Δυναμική Μηχανών I Διάλεξη 8 Χειμερινό Εξάμηνο 23 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ Ανακοινώσεις To μάθημα MATLAB/simulink για όσους δήλωσαν συμμετοχή έως χθες θα γίνει στις 6//24: Office Hours: Δευτέρα -3 μμ,
Εισαγωγή στη Matlab Εισαγωγή στην Αριθμητική Ανάλυση Διδάσκων: Γεώργιος Ακρίβης Βοηθός: Δημήτριος Ζαβαντής
 Εισαγωγή στη Matlab Εισαγωγή στην Αριθμητική Ανάλυση Διδάσκων: Γεώργιος Ακρίβης Βοηθός: Δημήτριος Ζαβαντής email: dzavanti@cs.uoi.gr Περιεχόμενα Τι είναι η Matlab; Ιστορικά Χρήσεις και στοιχεία της Matlab
Εισαγωγή στη Matlab Εισαγωγή στην Αριθμητική Ανάλυση Διδάσκων: Γεώργιος Ακρίβης Βοηθός: Δημήτριος Ζαβαντής email: dzavanti@cs.uoi.gr Περιεχόμενα Τι είναι η Matlab; Ιστορικά Χρήσεις και στοιχεία της Matlab
Παρουσίαση του Mathematica
 Παρουσίαση του Mathematica Εργαστήριο Σκυλίτσης Θεοχάρης Καλαματιανός Ρωμανός Καπλάνης Αθανάσιος Ιόνιο Πανεπιστήμιο (www.ionio.gr)( Εισαγωγή Σύμβολα πράξεων ή συναρτήσεων: Πρόσθεση + Αφαίρεση - Πολλαπλασιασμός
Παρουσίαση του Mathematica Εργαστήριο Σκυλίτσης Θεοχάρης Καλαματιανός Ρωμανός Καπλάνης Αθανάσιος Ιόνιο Πανεπιστήμιο (www.ionio.gr)( Εισαγωγή Σύμβολα πράξεων ή συναρτήσεων: Πρόσθεση + Αφαίρεση - Πολλαπλασιασμός
Προσομoίωση Απόκρισης Συστήματος στο MATLAB
 Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
Δυναμική Μηχανών Ι Διδάσκων: Αντωνιάδης Ιωάννης Προσομoίωση Απόκρισης Συστήματος στο MATLAB Άδεια Χρήσης Το παρόν υλικό βασίζεται στην παρουσίαση Προσομoίωση Απόκρισης Συστήματος στο MATLAB του καθ. Ιωάννη
Λύσεις θεμάτων Α εξεταστικής περιόδου χειμερινού εξαμήνου 2013-14 (Ιούνιος 2014)
") Λύσεις θεμάτων Α εξεταστικής περιόδου χειμερινού εξαμήνου 201314 (Ιούνιος 2014) ΘΕΜΑ 1 Ο (3,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό λειτουργικό διάγραμμα που περιγράφει ένα αναγνωριστικό αυτοκινούμενο
Λύσεις θεμάτων Α εξεταστικής περιόδου χειμερινού εξαμήνου 201314 (Ιούνιος 2014) ΘΕΜΑ 1 Ο (3,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό λειτουργικό διάγραμμα που περιγράφει ένα αναγνωριστικό αυτοκινούμενο
Κυκλώματα με ημιτονοειδή διέγερση
 Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
Εισαγωγή στο Περιβάλλον Επιστημονικού Προγραμματισμού MATLAB-Simulink. Δημήτριος Τζεράνης Λεωνίδας Αλεξόπουλος
 Εισαγωγή στο Περιβάλλον Επιστημονικού Προγραμματισμού MATLAB-Simulink Δημήτριος Τζεράνης Λεωνίδας Αλεξόπουλος 1 Τι είναι τα Matlab και Simulink? Το Matlab (MATrix LABoratory) είναι ένα περιβάλλον επιστημονικού
Εισαγωγή στο Περιβάλλον Επιστημονικού Προγραμματισμού MATLAB-Simulink Δημήτριος Τζεράνης Λεωνίδας Αλεξόπουλος 1 Τι είναι τα Matlab και Simulink? Το Matlab (MATrix LABoratory) είναι ένα περιβάλλον επιστημονικού
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ ΣΧΕΔΙΑΣΗ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΑΣΚΗΣΗ 2
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΕΝΟΤΗΤΑ 12: ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ ΔΙΑΓΡΑΜΜΑΤΑ BODE
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ : ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ ΔΙΑΓΡΑΜΜΑΤΑ BODE Δρ Γιώργος Μαϊστρος, Χημικός Μηχανικός
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ : ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ ΔΙΑΓΡΑΜΜΑΤΑ BODE Δρ Γιώργος Μαϊστρος, Χημικός Μηχανικός
Βασικά στοιχεία στο Matlab
 Αριθμητική : + - * / ^ 3ˆ2 - (5 + 4)/2 + 6*3 >> 3^2 - (5 + 4)/2 + 6*3 22.5000 Βασικά στοιχεία στο Matlab Το Matlab τυπώνει την απάντηση και την καταχωρεί σε μια μεταβλητή που την ονομάζει ans. Αν θέλουμε
Αριθμητική : + - * / ^ 3ˆ2 - (5 + 4)/2 + 6*3 >> 3^2 - (5 + 4)/2 + 6*3 22.5000 Βασικά στοιχεία στο Matlab Το Matlab τυπώνει την απάντηση και την καταχωρεί σε μια μεταβλητή που την ονομάζει ans. Αν θέλουμε
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
ΜΟΝΤΕΡΝΑ ΘΕΩΡΙΑ ΕΛΕΓΧΟΥ ΜΑΘΗΜΑΤΙΚΗ ΘΕΩΡΙΑΣ ΣΥΣΤΗΜΑΤΩΝ ΙΙ Τμήμα Μαθηματικών - Τομέας Υπολογιστών & Αριθμητικής Ανάλυσης Εξετάσεις Σεπτεμβρίου 2016
 ΜΟΝΤΕΡΝΑ ΘΕΩΡΙΑ ΕΛΕΓΧΟΥ ΜΑΘΗΜΑΤΙΚΗ ΘΕΩΡΙΑΣ ΣΥΣΤΗΜΑΤΩΝ ΙΙ Τμήμα Μαθηματικών - Τομέας Υπολογιστών & Αριθμητικής Ανάλυσης Εξετάσεις Σεπτεμβρίου 016 Θέμα 1. α) (Μον.1.5) Αποδείξτε ότι αν το σύστημα στο χώρο
ΜΟΝΤΕΡΝΑ ΘΕΩΡΙΑ ΕΛΕΓΧΟΥ ΜΑΘΗΜΑΤΙΚΗ ΘΕΩΡΙΑΣ ΣΥΣΤΗΜΑΤΩΝ ΙΙ Τμήμα Μαθηματικών - Τομέας Υπολογιστών & Αριθμητικής Ανάλυσης Εξετάσεις Σεπτεμβρίου 016 Θέμα 1. α) (Μον.1.5) Αποδείξτε ότι αν το σύστημα στο χώρο
ΑΣΚΗΣΗ Για τα µαθήµατα: Εισαγωγή στον Αυτόµατο Έλεγχο (5 ο Εξάµηνο ΣΗΜΜΥ) Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ)
 Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ)") ΑΣΚΗΣΗ 7-2-27 Για τα µαθήµατα: Εισαγωγή στον Αυτόµατο Έλεγχο (5 ο Εξάµηνο ΣΗΜΜΥ) Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ) Ακαδηµαϊκό Έτος: 27-28 ιδάσκων:γ. Π. Παπαβασιλόπουλος Επιµέλεια
ΑΣΚΗΣΗ 7-2-27 Για τα µαθήµατα: Εισαγωγή στον Αυτόµατο Έλεγχο (5 ο Εξάµηνο ΣΗΜΜΥ) Σχεδίαση Συστηµάτων Αυτοµάτου Ελέγχου (6 ο Εξάµηνο ΣΗΜΜΥ) Ακαδηµαϊκό Έτος: 27-28 ιδάσκων:γ. Π. Παπαβασιλόπουλος Επιµέλεια
Σύντομη Αναφορά σε Βασικές Έννοιες Ψηφιακής Επεξεργασίας Σημάτων
 Πρόγραμμα Μεταπτυχιακών Σπουδών: «Τεχνολογίες και Συστήματα Ευρυζωνικών Εφαρμογών και Υπηρεσιών» Μάθημα: «Επεξεργασία Ψηφιακού Σήματος και Σχεδιασμός Υλικού» Σύντομη Αναφορά σε Βασικές Έννοιες Ψηφιακής
Πρόγραμμα Μεταπτυχιακών Σπουδών: «Τεχνολογίες και Συστήματα Ευρυζωνικών Εφαρμογών και Υπηρεσιών» Μάθημα: «Επεξεργασία Ψηφιακού Σήματος και Σχεδιασμός Υλικού» Σύντομη Αναφορά σε Βασικές Έννοιες Ψηφιακής
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ. Ενότητα : ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ Ζ (ΖTransform)
") ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ Ζ (ΖTransform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ Ζ (ΖTransform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Εισαγωγή στην Τεχνολογία Αυτοματισμού
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ - 1 η ΣΕΙΡΑ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ17-18 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ - 1 η ΣΕΙΡΑ CONTROL
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΡΗΤΗΣ ΧΕΙΜ17-18 ΗΜΕΡΟΜΗΝΙΑ: ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ - 1 η ΣΕΙΡΑ CONTROL
. Πρόκειται για ένα σημαντικό βήμα, καθώς η παράμετρος χρόνος υποχρεωτικά μεταβάλλεται σε κάθε είδους κίνηση. Η επιλογή της χρονικής στιγμής t o
 Στις ασκήσεις Κινητικής υπάρχουν αρκετοί τρόποι για να δουλέψουμε. Ένας από αυτούς είναι με τη σωστή χρήση των εξισώσεων θέσης (κίνησης) και ταχύτητας των σωμάτων που περιγράφονται. Τα βήματα που ακολουθούμε
Στις ασκήσεις Κινητικής υπάρχουν αρκετοί τρόποι για να δουλέψουμε. Ένας από αυτούς είναι με τη σωστή χρήση των εξισώσεων θέσης (κίνησης) και ταχύτητας των σωμάτων που περιγράφονται. Τα βήματα που ακολουθούμε
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 16/2/2012 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ A ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ Ι
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 6//0 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ A ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ Ι ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ Σωματίδιο μάζας m = Kg κινείται ευθύγραμμα και ομαλά στον
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 6//0 ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ A ΓΡΑΠΤΗ ΕΞΕΤΑΣΗ ΣΤΗ ΦΥΣΙΚΗ Ι ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ Σωματίδιο μάζας m = Kg κινείται ευθύγραμμα και ομαλά στον
ΧΡΟΝΙΚΗ ΑΠΟΚΡΙΣΗ ΣΥΝΑΡΤΗΣΕΙ ΤΩΝ ΠΟΛΩΝ ΤΗΣ ΣΥΝΑΡΤΗΣΗΣ ΕΞΟΔΟΥ Y(s) ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΓΝΩΡΙΣΜΑΤΑ ΤΗΣ ΧΡΟΝΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΕ ΕΙΣΟΔΟ ΜΟΝΑΔΙΑΙΑΣ ΒΑΘΜΙΔΑΣ
 ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΓΝΩΡΙΣΜΑΤΑ ΤΗΣ ΧΡΟΝΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΕ ΕΙΣΟΔΟ ΜΟΝΑΔΙΑΙΑΣ ΒΑΘΜΙΔΑΣ") ΧΡΟΝΙΚΗ ΑΠΟΚΡΙΣΗ ΣΥΝΑΡΤΗΣΕΙ ΤΩΝ ΠΟΛΩΝ ΤΗΣ ΣΥΝΑΡΤΗΣΗΣ ΕΞΟΔΟΥ Y(s) 1 Πόλος στην αρχή των αξόνων: 2 Πόλος στον αρνητικό πραγματικό ημιάξονα: 3 Πόλος στον θετικό πραγματικό ημιάξονα: 4 Συζυγείς πόλοι πάνω
ΧΡΟΝΙΚΗ ΑΠΟΚΡΙΣΗ ΣΥΝΑΡΤΗΣΕΙ ΤΩΝ ΠΟΛΩΝ ΤΗΣ ΣΥΝΑΡΤΗΣΗΣ ΕΞΟΔΟΥ Y(s) 1 Πόλος στην αρχή των αξόνων: 2 Πόλος στον αρνητικό πραγματικό ημιάξονα: 3 Πόλος στον θετικό πραγματικό ημιάξονα: 4 Συζυγείς πόλοι πάνω
Ψηφιακός Έλεγχος. 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
Λύσεις θεμάτων εξεταστικής περιόδου Ιουνίου v 3 (t) - i 2 (t)
 - i 2 (t)") Λύσεις θεμάτων εξεταστικής περιόδου Ιουνίου 2015 ΘΕΜΑ 1 Ο (6,0 μονάδες) Δίνεται το κύκλωμα του σχήματος, όπου v 1 (t) είναι η είσοδος και v 3 (t) η έξοδος. Να θεωρήσετε μηδενικές αρχικές συνθήκες. v 1
Λύσεις θεμάτων εξεταστικής περιόδου Ιουνίου 2015 ΘΕΜΑ 1 Ο (6,0 μονάδες) Δίνεται το κύκλωμα του σχήματος, όπου v 1 (t) είναι η είσοδος και v 3 (t) η έξοδος. Να θεωρήσετε μηδενικές αρχικές συνθήκες. v 1
Συστήματα Αυτομάτου Ελέγχου ΙΙ Ασκήσεις Πράξης
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΧΕΔΙΑΣΗΣ & ΠΑΡΑΓΩΓΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Αν Καθ: Δ ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Επικ Καθ: Σ ΒΑΣΙΛΕΙΑΔΟΥ Συστήματα
ΠΑΝΕΠΙΣΤΗΜΙΟ ΔΥΤΙΚΗΣ ΑΤΤΙΚΗΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΒΙΟΜΗΧΑΝΙΚΗΣ ΣΧΕΔΙΑΣΗΣ & ΠΑΡΑΓΩΓΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Αν Καθ: Δ ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Επικ Καθ: Σ ΒΑΣΙΛΕΙΑΔΟΥ Συστήματα
Πρώτη επαφή με το μαθηματικό πακέτο Mathematica
 Πρώτη επαφή με το μαθηματικό πακέτο Mathematica Με δύο λόγια, μπορούμε να πούμε ότι η Mathematica είναι ένα πρόγραμμα που το χρησιμοποιούμε για να κάνουμε αναλυτικούς και αριθμητικούς υπολογισμούς αλλά
Πρώτη επαφή με το μαθηματικό πακέτο Mathematica Με δύο λόγια, μπορούμε να πούμε ότι η Mathematica είναι ένα πρόγραμμα που το χρησιμοποιούμε για να κάνουμε αναλυτικούς και αριθμητικούς υπολογισμούς αλλά
. Οι ιδιοτιμές του 3 3 canonical-πίνακα είναι οι ρίζες της. , β) η δεύτερη είσοδος επηρεάζει μόνο το μεσαίο 3 3 πίνακα και
 η δεύτερη είσοδος επηρεάζει μόνο το μεσαίο 3 3 πίνακα και") ο ΘΕΜΑ [6. βαθμοί] 5 u x x + u Ax + Bu Έστω συνεχές σύστημα 4 5 3 u3 y [ ] x. [ β] Ποιες είναι οι ιδιοτιμές του πίνακα Α; 5 Με το ακόλουθο partinioning του πίνακα A οι ιδιοτιμές του είναι 4 5 eig(a) eig(
ο ΘΕΜΑ [6. βαθμοί] 5 u x x + u Ax + Bu Έστω συνεχές σύστημα 4 5 3 u3 y [ ] x. [ β] Ποιες είναι οι ιδιοτιμές του πίνακα Α; 5 Με το ακόλουθο partinioning του πίνακα A οι ιδιοτιμές του είναι 4 5 eig(a) eig(
Βαθμολογία Προβλημάτων Θέμα (μέγιστος βαθμός) (βαθμός εξέτασης)
 (βαθμός εξέτασης)") 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Ιουλίου 007 ΕΠΩΝΥΜΟ (εξεταζόμενου/ης) ΟΝΟΜΑ (εξεταζόμενου/ης) Αριθμός Μητρώου Υπογραφή (εξεταζόμενου/ης)
4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Ιουλίου 007 ΕΠΩΝΥΜΟ (εξεταζόμενου/ης) ΟΝΟΜΑ (εξεταζόμενου/ης) Αριθμός Μητρώου Υπογραφή (εξεταζόμενου/ης)
Συστήματα Αυτομάτου Ελέγχου ΙΙ Γιώργος Σούλτης 167
 Προσομοίωση πραγματικών συστημάτων στο MATLAB Είδαμε μέχρι τώρα πως μπορούμε να υπολογίσουμε την συνάρτηση μεταφοράς σε πραγματικά συστήματα. Ο υπολογισμός της συνάρτησης μεταφοράς στη ουσία είναι η «γραμμικοποίηση»
Προσομοίωση πραγματικών συστημάτων στο MATLAB Είδαμε μέχρι τώρα πως μπορούμε να υπολογίσουμε την συνάρτηση μεταφοράς σε πραγματικά συστήματα. Ο υπολογισμός της συνάρτησης μεταφοράς στη ουσία είναι η «γραμμικοποίηση»
Παράδειγμα 14.2 Να βρεθεί ο μετασχηματισμός Laplace των συναρτήσεων
 Κεφάλαιο 4 Μετασχηματισμός aplace 4. Μετασχηματισμός aplace της εκθετικής συνάρτησης e Είναι Άρα a a a u( a ( a ( a ( aj F( e e d e d [ e ] [ e ] ( a e (c ji, με a (4.9 a a a [ e u( ] a, με a (4.3 Η σχέση
Κεφάλαιο 4 Μετασχηματισμός aplace 4. Μετασχηματισμός aplace της εκθετικής συνάρτησης e Είναι Άρα a a a u( a ( a ( a ( aj F( e e d e d [ e ] [ e ] ( a e (c ji, με a (4.9 a a a [ e u( ] a, με a (4.3 Η σχέση
Σύστημα και Μαθηματικά μοντέλα συστημάτων
 Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
Homework#13 Trigonometry Honors Study Guide for Final Test#3
 Homework#13 Trigonometry Honors Study Guide for Final Test#3 1. Στο παρακάτω σχήμα δίνεται ο μοναδιαίος κύκλος: Να γράψετε τις συντεταγμένες του σημείου ή το όνομα του άξονα: 1. (ε 1) είναι ο άξονας 11.
Homework#13 Trigonometry Honors Study Guide for Final Test#3 1. Στο παρακάτω σχήμα δίνεται ο μοναδιαίος κύκλος: Να γράψετε τις συντεταγμένες του σημείου ή το όνομα του άξονα: 1. (ε 1) είναι ο άξονας 11.
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων
 Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Εισαγωγή στην Ανάλυση και Προσοµοίωση Δυναµικών Συστηµάτων Control Systems Laboratory Περιγραφή Δυναµικών Συστηµάτων Εξίσωση µεταβολής όγκου Η µεταβολή όγκου ισούται µε τη παροχή υγρού Q που σχετίζεται
Τετραγωνικά μοντέλα. Τετραγωνικό μοντέλο συνάρτησης. Παράδειγμα τετραγωνικού μοντέλου #1. Παράδειγμα τετραγωνικού μοντέλου #1
 Τετραγωνικό μοντέλο συνάρτησης Τετραγωνικά μοντέλα Δ. Γ. Παπαγεωργίου Τμήμα Μηχανικών Επιστήμης Υλικών Πανεπιστήμιο Ιωαννίνων dpapageo@cc.uoi.gr http://pc164.materials.uoi.gr/dpapageo Για συνάρτηση μιας
Τετραγωνικό μοντέλο συνάρτησης Τετραγωνικά μοντέλα Δ. Γ. Παπαγεωργίου Τμήμα Μηχανικών Επιστήμης Υλικών Πανεπιστήμιο Ιωαννίνων dpapageo@cc.uoi.gr http://pc164.materials.uoi.gr/dpapageo Για συνάρτηση μιας
Βαθµολογία Προβληµάτων ΘΕΜΑ 1 ΘΕΜΑ 2.1 ΘΕΜΑ 2.2 ΘΕΜΑ 2.3 ΘΕΜΑ 3.1 ΘΕΜΑ 3.2 ΘΕΜΑ 4 ΘΕΜΑ 5.1 ΘΕΜΑ 5.2. G(s)
") ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ 3 Σεπτεµβρίου 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεµβρίου 4 Να επιστραφεί η εκφώνηση των θεµάτων (υπογεγραµµένη από τον εξεταστή) ΕΠΩΝΥΜΟ
ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ 3 Σεπτεµβρίου 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεµβρίου 4 Να επιστραφεί η εκφώνηση των θεµάτων (υπογεγραµµένη από τον εξεταστή) ΕΠΩΝΥΜΟ
Βασικές Γνώσεις Μαθηματικών Α - Β Λυκείου
 Βασικές Γνώσεις Μαθηματικών Α - Β Λυκείου Αριθμοί 1. ΑΡΙΘΜΟΙ Σύνολο Φυσικών αριθμών: Σύνολο Ακέραιων αριθμών: Σύνολο Ρητών αριθμών: ακέραιοι με Άρρητοι αριθμοί: είναι οι μη ρητοί π.χ. Το σύνολο Πραγματικών
Βασικές Γνώσεις Μαθηματικών Α - Β Λυκείου Αριθμοί 1. ΑΡΙΘΜΟΙ Σύνολο Φυσικών αριθμών: Σύνολο Ακέραιων αριθμών: Σύνολο Ρητών αριθμών: ακέραιοι με Άρρητοι αριθμοί: είναι οι μη ρητοί π.χ. Το σύνολο Πραγματικών
Δυναμική Μηχανών I. Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις. Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές
 Δυναμική Μηχανών I Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις 5 3 Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com
Δυναμική Μηχανών I Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις 5 3 Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα
 Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Αντίστροφος Μετασχηματισμός Laplace Στην
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Αντίστροφος Μετασχηματισμός Laplace Στην
Εργαστηριακή ενότητα 3
 Εργαστηριακή ενότητα 3 Αναλογική προσομοίωση Αναλογικός Υπολογιστής Σκοπός των εργαστηριακών ασκήσεων Ο σκοπός των εργαστηριακών ασκήσεων της τρίτης νότητας είναι: Να κατανοήσουν οι φοιτητές τι είναι η
Εργαστηριακή ενότητα 3 Αναλογική προσομοίωση Αναλογικός Υπολογιστής Σκοπός των εργαστηριακών ασκήσεων Ο σκοπός των εργαστηριακών ασκήσεων της τρίτης νότητας είναι: Να κατανοήσουν οι φοιτητές τι είναι η
Υποθέστε ότι ο ρυθμός ροής από ένα ακροφύσιο είναι γραμμική συνάρτηση της διαφοράς στάθμης στα δύο άκρα του ακροφυσίου.
 ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
ΕΛΕΓΚΤΕΣ PID. Ελεγκτής τριών όρων Η συνάρτηση μεταφοράς του PID ελεγκτή είναι η ακόλουθη:
 ΕΛΕΓΚΤΕΣ PID Εισαγωγή Αυτό το βοήθημα θα σας δείξει τα χαρακτηριστικά καθενός από τους τρεις ελέγχους ενός PID ελεγκτή, του αναλογικού (P), του ολοκληρωτικού (I) και του διαφορικού (D) ελέγχου, καθώς και
ΕΛΕΓΚΤΕΣ PID Εισαγωγή Αυτό το βοήθημα θα σας δείξει τα χαρακτηριστικά καθενός από τους τρεις ελέγχους ενός PID ελεγκτή, του αναλογικού (P), του ολοκληρωτικού (I) και του διαφορικού (D) ελέγχου, καθώς και
Α. Αιτιολογήστε αν είναι γραμμικά ή όχι και χρονικά αμετάβλητα ή όχι.
 ΨΗΦΙΑΚΗ ΕΠΕΞΕΡΓΑΣΙΑ ΣΗΜΑΤΟΣ ΕΞ. ΠΕΡΙΟΔΟΣ Β ΧΕΙΜ. 00 - ΩΡΕΣ ΘΕΜΑ Για τα παρακάτω συστήματα εισόδου εξόδου α. y ( 3x( x( n ) β. y ( x( n ) / γ. y ( x( x( n ) δ. y( x( n ) Α. Αιτιολογήστε αν είναι γραμμικά
ΨΗΦΙΑΚΗ ΕΠΕΞΕΡΓΑΣΙΑ ΣΗΜΑΤΟΣ ΕΞ. ΠΕΡΙΟΔΟΣ Β ΧΕΙΜ. 00 - ΩΡΕΣ ΘΕΜΑ Για τα παρακάτω συστήματα εισόδου εξόδου α. y ( 3x( x( n ) β. y ( x( n ) / γ. y ( x( x( n ) δ. y( x( n ) Α. Αιτιολογήστε αν είναι γραμμικά
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα. Τίτλος Μαθήματος
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Τίτλος Μαθήματος Ενότητα : Μετασχηματισμός LAPLACE (Laplace Tranform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Τίτλος Μαθήματος Ενότητα : Μετασχηματισμός LAPLACE (Laplace Tranform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΔΕΙΓΜΑ ΠΡΙΝ ΤΙΣ ΔΙΟΡΘΩΣΕΙΣ - ΕΚΔΟΣΕΙΣ ΚΡΙΤΙΚΗ
 Συναρτήσεις Προεπισκόπηση Κεφαλαίου Τα μαθηματικά είναι μια γλώσσα με ένα συγκεκριμένο λεξιλόγιο και πολλούς κανόνες. Πριν ξεκινήσετε το ταξίδι σας στον Απειροστικό Λογισμό, θα πρέπει να έχετε εξοικειωθεί
Συναρτήσεις Προεπισκόπηση Κεφαλαίου Τα μαθηματικά είναι μια γλώσσα με ένα συγκεκριμένο λεξιλόγιο και πολλούς κανόνες. Πριν ξεκινήσετε το ταξίδι σας στον Απειροστικό Λογισμό, θα πρέπει να έχετε εξοικειωθεί
Συστήματα Αναμονής (Queuing Systems)
") ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ - ΕΜΠ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧ. ΥΠΟΛΟΓΙΣΤΩΝ Τομέας Επικοινωνιών, Ηλεκτρονικής & Συστημάτων Πληροφορικής Εργαστήριο Διαχείρισης & Βέλτιστου Σχεδιασμού Δικτύων Τηλεματικής
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ - ΕΜΠ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ & ΜΗΧ. ΥΠΟΛΟΓΙΣΤΩΝ Τομέας Επικοινωνιών, Ηλεκτρονικής & Συστημάτων Πληροφορικής Εργαστήριο Διαχείρισης & Βέλτιστου Σχεδιασμού Δικτύων Τηλεματικής
3 ο ΕΡΓΑΣΤΗΡΙΟ ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 3 ο ΕΡΓΑΣΤΗΡΙΟ ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα: ΔΟΥΛΕΥΟΝΤΑΣ ΜΕ ΣΗΜΑΤΑ Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 3 ο ΕΡΓΑΣΤΗΡΙΟ ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα: ΔΟΥΛΕΥΟΝΤΑΣ ΜΕ ΣΗΜΑΤΑ Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Περιγραφή Συστηµάτων Αυτοµάτου Ελέγχου
 ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Περιγραφή Συστηµάτων Αυτοµάτου Ελέγχου ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος [5]: Κεφάλαιο 3, Ενότητες 3. 3.8 Παρασκευόπουλος [5]:
ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Περιγραφή Συστηµάτων Αυτοµάτου Ελέγχου ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος [5]: Κεφάλαιο 3, Ενότητες 3. 3.8 Παρασκευόπουλος [5]:
M files RCL Κυκλώματα
 M files RCL Κυκλώματα Στο MATLAB γράφουμε τις δικές μας εντολές και προγράμματα μέσω αρχείων που καλούνται m-files. Έχουν το επίθεμα.m π.χ compute.m Υπάρχουν δύο είδη m-files: τα αρχεία script (script
M files RCL Κυκλώματα Στο MATLAB γράφουμε τις δικές μας εντολές και προγράμματα μέσω αρχείων που καλούνται m-files. Έχουν το επίθεμα.m π.χ compute.m Υπάρχουν δύο είδη m-files: τα αρχεία script (script
Συστήματα Αυτομάτου Ελέγχου 1 Ενότητα # 6: Έννοια της συνάρτησης μεταφοράς Παραδείγματα εφαρμογής σε φυσικά συστήματα
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Συστήματα Αυτομάτου Ελέγχου 1 Ενότητα # 6: Έννοια της συνάρτησης μεταφοράς Παραδείγματα εφαρμογής σε φυσικά συστήματα Δ. Δημογιαννόπουλος, dimogian@teipir.gr
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Συστήματα Αυτομάτου Ελέγχου 1 Ενότητα # 6: Έννοια της συνάρτησης μεταφοράς Παραδείγματα εφαρμογής σε φυσικά συστήματα Δ. Δημογιαννόπουλος, dimogian@teipir.gr
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
5.2 (α) Να γραφούν οι εξισώσεις βρόχων για το κύκλωμα του σχήματος Π5.2α. (β) Να γραφούν οι εξισώσεις κόμβων για το κύκλωμα του σχήματος Π5.
 Να γραφούν οι εξισώσεις βρόχων για το κύκλωμα του σχήματος Π5.2α. (β) Να γραφούν οι εξισώσεις κόμβων για το κύκλωμα του σχήματος Π5.") ΣΥΝΑΡΤΗΣΗ ΣΥΣΤΗΜΑΤΟΣ, ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ, ΠΡΟΣΟΜΟΙΩΣΗ 5. (α) Να βρεθεί η τιμή της σύνθετης αντίστασης Ζ(s) των τριών κυκλωμάτων στο σχήμα Π5. (β) Να βρεθούν οι πόλοι και τα μηδενικά της Ζ(s). (γ) Να βρεθεί
ΣΥΝΑΡΤΗΣΗ ΣΥΣΤΗΜΑΤΟΣ, ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ, ΠΡΟΣΟΜΟΙΩΣΗ 5. (α) Να βρεθεί η τιμή της σύνθετης αντίστασης Ζ(s) των τριών κυκλωμάτων στο σχήμα Π5. (β) Να βρεθούν οι πόλοι και τα μηδενικά της Ζ(s). (γ) Να βρεθεί
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα
 Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Αντίστροφος Μετασχηματισμός Laplace Στην
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Αντίστροφος Μετασχηματισμός Laplace Στην
To SIMULINK του Matlab
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΧΗΜΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ Β ΧΗΜΙΚΗΣ ΜΗΧΑΝΙΚΗΣ ΚΑΘ. Κ. ΚΥΠΑΡΙΣΣΙΔΗΣ, ΛΕΚΤΟΡΑΣ Χ. ΧΑΤΖΗΔΟΥΚΑΣ Τ.Θ. 472 54 124 ΘΕΣΣΑΛΟΝΙΚΗ Μάθημα: ΡΥΘΜΙΣΗ ΣΥΣΤΗΜΑΤΩΝ Ακαδ.
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΧΗΜΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ Β ΧΗΜΙΚΗΣ ΜΗΧΑΝΙΚΗΣ ΚΑΘ. Κ. ΚΥΠΑΡΙΣΣΙΔΗΣ, ΛΕΚΤΟΡΑΣ Χ. ΧΑΤΖΗΔΟΥΚΑΣ Τ.Θ. 472 54 124 ΘΕΣΣΑΛΟΝΙΚΗ Μάθημα: ΡΥΘΜΙΣΗ ΣΥΣΤΗΜΑΤΩΝ Ακαδ.
Τετραγωνικά μοντέλα. Τετραγωνικό μοντέλο συνάρτησης. Παράδειγμα τετραγωνικού μοντέλου #1. Παράδειγμα τετραγωνικού μοντέλου #1
 Τετραγωνικό μοντέλο συνάρτησης Τετραγωνικά μοντέλα Δ. Γ. Παπαγεωργίου Τμήμα Μηχανικών Επιστήμης Υλικών Πανεπιστήμιο Ιωαννίνων dpapageo@cc.uoi.gr http://pc64.materials.uoi.gr/dpapageo Για συνάρτηση μιας
Τετραγωνικό μοντέλο συνάρτησης Τετραγωνικά μοντέλα Δ. Γ. Παπαγεωργίου Τμήμα Μηχανικών Επιστήμης Υλικών Πανεπιστήμιο Ιωαννίνων dpapageo@cc.uoi.gr http://pc64.materials.uoi.gr/dpapageo Για συνάρτηση μιας
y 1 (x) f(x) W (y 1, y 2 )(x) dx,
 f(x) W (y 1, y 2 )(x) dx,") Συνήθεις Διαφορικές Εξισώσεις Ι Ασκήσεις - 07/1/017 Μέρος 1ο: Μη Ομογενείς Γραμμικές Διαφορικές Εξισώσεις Δεύτερης Τάξης Θεωρούμε τη γραμμική μή-ομογενή διαφορική εξίσωση y + p(x) y + q(x) y = f(x), x
Συνήθεις Διαφορικές Εξισώσεις Ι Ασκήσεις - 07/1/017 Μέρος 1ο: Μη Ομογενείς Γραμμικές Διαφορικές Εξισώσεις Δεύτερης Τάξης Θεωρούμε τη γραμμική μή-ομογενή διαφορική εξίσωση y + p(x) y + q(x) y = f(x), x
Περιεχόμενα. Κεφάλαιο 1 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΣΕ ΜΙΑ ΕΥΘΕΙΑ... 13 1.1 Οι συντεταγμένες ενός σημείου...13 1.2 Απόλυτη τιμή...14
 Περιεχόμενα Κεφάλαιο 1 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΣΕ ΜΙΑ ΕΥΘΕΙΑ... 13 1.1 Οι συντεταγμένες ενός σημείου...13 1.2 Απόλυτη τιμή...14 Κεφάλαιο 2 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΣΕ ΕΝΑ ΕΠΙΠΕΔΟ 20 2.1 Οι συντεταγμένες
Περιεχόμενα Κεφάλαιο 1 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΣΕ ΜΙΑ ΕΥΘΕΙΑ... 13 1.1 Οι συντεταγμένες ενός σημείου...13 1.2 Απόλυτη τιμή...14 Κεφάλαιο 2 ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ΣΕ ΕΝΑ ΕΠΙΠΕΔΟ 20 2.1 Οι συντεταγμένες
Δυναμική Μηχανών I. Συνάρτηση Απόκρισης Συχνότητας
 Δυναμική Μηχανών I 7 3 Συνάρτηση Απόκρισης Συχνότητας 215 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα Απόκριση
Δυναμική Μηχανών I 7 3 Συνάρτηση Απόκρισης Συχνότητας 215 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε αναπαραγωγή χωρίς άδεια Περιεχόμενα Απόκριση
Περιληπτικά, τα βήματα που ακολουθούμε γενικά είναι τα εξής:
 Αυτό που πρέπει να θυμόμαστε, για να μη στεναχωριόμαστε, είναι πως τόσο στις εξισώσεις, όσο και στις ανισώσεις 1ου βαθμού, που θέλουμε να λύσουμε, ακολουθούμε ακριβώς τα ίδια βήματα! Εκεί που πρεπει να
Αυτό που πρέπει να θυμόμαστε, για να μη στεναχωριόμαστε, είναι πως τόσο στις εξισώσεις, όσο και στις ανισώσεις 1ου βαθμού, που θέλουμε να λύσουμε, ακολουθούμε ακριβώς τα ίδια βήματα! Εκεί που πρεπει να
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα
 Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής Φυσική Σημασία του Μετασχηματισμού Fourier Ο μετασχηματισμός Fourier
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής Φυσική Σημασία του Μετασχηματισμού Fourier Ο μετασχηματισμός Fourier
ΚΕΦΑΛΑΙΟ 3 ο ΣΥΝΑΡΤΗΣΕΙΣ, ΤΡΙΓΩΝΟΜΕΤΡΙΑ( FUNCTIONS,TRIGONOMETRY)
") ΚΕΦΑΛΑΙΟ 3 ο ΣΥΝΑΡΤΗΣΕΙΣ, ΤΡΙΓΩΝΟΜΕΤΡΙΑ( FUNCTIONS,TRIGONOMETRY) 3.1 ΘΕΩΡΙΑ-ΤΥΠΟΛΟΓΙΟ-ΠΑΡΑΔΕΙΓΜΑΤΑ ΣΥΝΑΡΤΗΣΕΙΣ Συνάρτηση, ή απεικόνιση όπως ονομάζεται διαφορετικά, είναι μια αντιστοίχιση μεταξύ δύο συνόλων,
ΚΕΦΑΛΑΙΟ 3 ο ΣΥΝΑΡΤΗΣΕΙΣ, ΤΡΙΓΩΝΟΜΕΤΡΙΑ( FUNCTIONS,TRIGONOMETRY) 3.1 ΘΕΩΡΙΑ-ΤΥΠΟΛΟΓΙΟ-ΠΑΡΑΔΕΙΓΜΑΤΑ ΣΥΝΑΡΤΗΣΕΙΣ Συνάρτηση, ή απεικόνιση όπως ονομάζεται διαφορετικά, είναι μια αντιστοίχιση μεταξύ δύο συνόλων,
1. Κατασκευάστε ένα διάνυσμα με στοιχεία τους ζυγούς αριθμούς μεταξύ του 31 και 75
 1. Κατασκευάστε ένα διάνυσμα με στοιχεία τους ζυγούς αριθμούς μεταξύ του 31 και 75 2. Έστω x = [2 5 1 6] α. Προσθέστε το 16 σε κάθε στοιχείο β. Προσθέστε το 3 σε κάθε στοιχείο που βρίσκεται σε μονή θέση.
1. Κατασκευάστε ένα διάνυσμα με στοιχεία τους ζυγούς αριθμούς μεταξύ του 31 και 75 2. Έστω x = [2 5 1 6] α. Προσθέστε το 16 σε κάθε στοιχείο β. Προσθέστε το 3 σε κάθε στοιχείο που βρίσκεται σε μονή θέση.
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #12: Παραδείγματα Αναλογικών Συστημάτων Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #12: Παραδείγματα Αναλογικών Συστημάτων Ελέγχου Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες