ιπλωµατική Εργασία της φοιτήτριας του Τµήµατος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστηµίου Πατρών
|
|
|
- Κασσάνδρα Λαμπρόπουλος
- 7 χρόνια πριν
- Προβολές:
Transcript
1 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΤΕΧΝΟΛΟΓΙΑΣ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ: Συστήµατα Αυτοµάτου Ελέγχου ΕΡΓΑΣΤΗΡΙΟ Συστηµάτων Αυτοµάτου Ελέγχου ιπλωµατική Εργασία της φοιτήτριας του Τµήµατος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών της Πολυτεχνικής Σχολής του Πανεπιστηµίου Πατρών Αγγελικής Τσαπικούνη του Γεωργίου Αριθµός Μητρώου: 6113 Θέµα «Οι Εκθέτες Lyapunov και ο αριθµητικός υπολογισµός τους» Επιβλέπων Νικόλαος Κούσουλας Αριθµός ιπλωµατικής Εργασίας: Πάτρα,Φεβρουάριος 2010
2 2 ΠΙΣΤΟΠΟΙΗΣΗ Πιστοποιείται ότι η ιπλωµατική Εργασία µε θέµα «Οι Εκθέτες Lyapunov και ο αριθµητικός υπολογισµός τους» Της φοιτήτριας του Τµήµατος Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών Αγγελικής Τσαπικούνη του Γεωργίου Αριθµός Μητρώου:6113 Παρουσιάστηκε δηµόσια και εξετάστηκε στο Τµήµα Ηλεκτρολόγων Μηχανικών και Τεχνολογίας Υπολογιστών στις.../../ Ο Επιβλέπων Νικόλαος Κούσουλας Καθηγητής Ο ιευθυντής του Τοµέα Νικόλαος Κούσουλας Καθηγητής
3 3 Αριθµός ιπλωµατικής Εργασίας: Θέµα: «Οι Εκθέτες Lyapunov και ο αριθµητικός υπολογισµός τους» Φοιτητής:Αγγελική Τσαπικούνη Επιβλέπων:Νικόλαος Κούσουλας Περίληψη Στην παρούσα διπλωµατική εργασία, µελετάµε την έννοια και σηµασία των εκθετών Lyapunov µέσω µεθόδων ανάλυσης πειραµατικών δεδοµένων που εφαρµόζονται στην φυσική, στην γεωλογία, στην αστρονοµία, στην νευροβιολογία, στην οικολογία και στα οικονοµικά. Οι εκθέτες Lyapunov παίζουν πολύ σηµαντικό ρόλο στην ανίχνευση χάους, το οποίο εµφανίζεται σε πολλούς τοµείς της επιστήµης και της τεχνολογίας. Άρα, το θέµα τους ανήκει στην θεωρία των χαοτικών δυναµικών συστηµάτων αλλά και γενικότερα όλων των δυναµικών συστηµάτων, τα οποία πρέπει να αναλυθούν σωστά και µε ακρίβεια για να πάρουµε τα σωστά συµπεράσµατα όσον αφορά τους εκθέτες Lyapunov. Σκοπός της µελέτης είναι η εύρεση των εκθετών Lyapunov για διάφορα δυναµικά συστήµατα και η εξήγηση των αποτελεσµάτων όσον αφορά την δυναµική συµπεριφορά του κάθε συστήµατος. Επίσης, παρουσιάζονται εφαρµογές στην επιστήµη όπου οι εκθέτες Lyapunov παίζουν σηµαντικό ρόλο και εξηγούνται οι κυριότεροι αλγόριθµοι υπολογισµού αυτών των εκθετών υπό διαφορετική υλοποίηση και σε διαφορετικά υπολογιστικά πακέτα, όπως το Matlab, το Mathematica και ακόµα σε γλώσα προγραµµατισµού C µε σκοπό την εύρεση του καλύτερου και πιο ακριβή αλγόριθµου. Επιπρόσθετα, παρουσιάζονται τα συµπεράσµατα µετά την ανάλυση όλων των αλγορίθµων και των αποτελεσµάτων και προτείνεται ο καλύτερος και αποτελεσµατικότερος αλγόριθµος όσον αφορά την απόδοση, τον χρόνο εκτέλεσης, αλλά και το µέγεθος των σφαλµάτων. Στο τέλος, υπάρχει παράρτηµα µε επιµέρους κώδικες που χρησιµοποιούνται, όπως ακόµα και η βιβλιογραφία από την οποία αντλήθηκαν πολύ σηµαντικές πληροφορίες.
4 4 ΕΙΣΑΓΩΓΙΚΟ ΣΗΜΕΙΩΜΑ Το θέµα µίας ασταθούς κατάστασης είναι γνωστό στην επιστήµη. εν είναι δυνατό στην πράξη να ισορροπήσει µία µπάλα στην κορυφή ενός βουνού, ακόµα και αν η διαµόρφωση της τέλεια ισορροπηµένης µπάλας στην κορυφή είναι σταθερή κατάσταση. Το πρόβληµα είναι ότι η τροχιά οποιασδήποτε αρχικής θέσης της µπάλας κοντά, αλλά όχι ακριβώς στην σταθερή κατάσταση, θα εξελιχθεί µακριά από αυτήν. Τι τελικά συµβαίνει στην µπάλα που είναι κοντα στην κορυφή; Αποµακρύνεται από την κορυφή και εγκαθίσταται σε µία κοιλάδα σε χαµηλότερο ύψος. Η κοιλάδα αντιπροσωπεύει µία ευσταθή σταθερή κατάσταση. Ένα είδος συµπεριφοράς για µία αρχική συνθήκη που αρχίζει κοντά σε µία ασταθή σταθερή κατάσταση είναι να αποµακρυνθεί και να ελκυστεί από µία ευσταθή σταθερή κατάσταση, ή ίσως από µία ευσταθή περιοδική κατάσταση. Θεωρούµε µία αρχική κατάσταση που είναι κοντά σε µία πηγή (source,είδος σταθερού σηµείου που χαρακτηρίζεται από ασταθή ισορροπία και απωθεί τις γειτονικές τροχιές στον χώρο των φάσεων) p µίας απεικόνισης f. Στην αρχή µίας τέτοιας τροχιάς, εµφανίζεται ασταθής συµπεριφορά. Εκθετικός διαχωρισµός σηµαίνει ότι η απόσταση ανάµεσα στο σηµείο της τροχιάς και της πηγής αυξάνει µε εκθετικό ρυθµό. Κάθε επανάληψη πολλαπλασιάζει την απόσταση µεταξύ τους κατά. Λέµε ότι ο εκθετικός ρυθµός διαχωρισµού είναι ανά επανάληψη. Αυτό σηµαίνει, τουλάχιστον στην αρχή, ότι οι µικροί δαιχωρισµοί µεγαλώνουν. Μετά από κάποια περιπλάνηση, η τροχιά µπορεί να ελκυστεί σε µία καταβόθρα (sink, είδος σταθερού σηµείου που χαρακτηρίζεται από ευσταθή ισορροπία, και έλκει τις γειτονικές τροχιές στον χώρο των φάσεων) q. Καθώς πλησιάζει την καταβόθρα, η τροχιά θα εµφανίσει συγκλίνουσα συµπεριφορά- η απόσταση µεταξύ του τροχιακού σηµείου και της καταβόθρας θα αλλάξει κατά τον παράγοντα. Καθώς η τροχιά πλησιάζει τον ελκυστή, µικρές αποστάσεις ολοένα µικραίνουν. Είναι σύνηθες να βλέπουµε ένα τέτοιο φαινόµενο κατά το οποίο η ασταθής συµπεριφορά είναι µεταβατική και τελικά καταλήγει σε ευσταθή συµπεριφορά. Αλλά δεν υπάρχει λόγος που µία αρχική κατάσταση αρχίζοντας κοντά σε µία πηγή αναγκάζεται να καταλήξει ελκυόµενη σε µία καταβόθρα ή περιοδική καταβόθρα. Μία χαοτική τροχιά είναι µία τέτοια τροχιά που πάντα συνεχίζει να έχει µία ασταθή συµπεριφορά κοντά σε µία πηγή, αλλά δεν είναι σταθερή ή περιοδική. εν καταφέρνει ποτέ να βρει µία καταβόθρα να ελκυστεί. Κοντά σε κάθε σηµείο µίας τέτοιας τροχιάς υπάρχουν σηµεία αυθαίρετα που θα αποµακρυνθούν από το σηµείο κατά την διάρκεια περαιτέρω επανάληψης. Αυτή η ανωµαλία ποσοτικοποιείται από τους αριθµούς Lyapunov και τους εκθέτες Lyapunov. Ορίζουµε τον αριθµό Lyapunov ως τον µέσο ρυθµό απόκλισης ανά βήµα των κοντινών στοιχείων κατά µήκος της τροχιάς, και τον εκθέτη Lyapunov ως τον φυσικό αλγόριθµο του αριθµού Lyapunov. Το χάος ορίζεται από έναν εκθέτη Lyapunov µεγαλύτερο από το µηδέν.
5 5 Έτσι, αναλυτικά στο πρώτο κεφάλαιο γίνεται µία εισαγωγή στην θεωρία των δυναµικών συστηµάτων, όπου δίνονται οι βασικοί ορισµοί των συστηµάτων και επίσης, η γενική περιγραφή των ιδιοτήτων του χάους αλλά και άλλων φαινοµένων που βοηθούν στην ανάλυσή του. Έπειτα, στο δεύτερο κεφάλαιο αναφέρεται η θεωρία των εκθετών Lyapunov και οι γενικοί αλγόριθµοι για την εύρεσή τους. Στο τρίτο κεφάλαιο γίνεται λόγος για την εφαρµογή των εκθετών Lyapunov σε διάφορες επιστήµες. Στο τέταρτο κεφάλαιο παρουσιάζονται διάφορα δυναµικά συστήµατα όπου εφαρµόζεται ο υπολογισµός των εκθετών Lyapunov. Από αυτά, χρησιµοποιούνται τα συστήµατα του Lorenz και του Rössler, για τα οποία προσεγγίζονται οι εκθέτες µε τη βοήθεια του Matlab, Mathematica και DevC++ και επίσης ακολουθούν τα συµπεράσµατα και η ανακεφαλαίωση των αποτελεσµάτων. Στο πέµπτο, υπάρχουν τα παραρτήµατα που περιέχουν τους κώδικες που χρησιµοποιήθηκαν και τέλος, παρουσιάζεται όλη η βιβλιογραφία που κρίθηκε απαραίτητη για την συσσώρρευση των απαραίτητων πληροφοριών που οδήγησε στην δηµιουργία της διπλωµατικής εργασίας. ΠΕΡΙΕΧΟΜΕΝΑ Περίληψη Εισαγωγικό σηµείωµα Εισαγωγή στα δυναµικά συστήµατα Βασικοί ορισµοί Μαθηµατική περιγραφή Μη χαοτικοί ελκυστές Ιστορική αναδροµή Χαοτικά συστήµατα Μηχανισµοί µετάβασης στο χάος Ανακατασκευή του χώρου φάσεων Χρόνος καθυστέρησης τ ιάσταση εµβύθισης m Εκθέτες Lyapunov Γενική θεωρητική προσέγγιση Φάσµα Lyapunov Ορισµός του φάσµατος Lyapunov ιάσταση Lyapunov Αριθµητική προσέγγιση εκθετών Lyapunov Αλγόριθµος των Benettin et al Παραγοντοποίηση πραγµατικών πινάκων Παραγοντοποίηση µιγαδικών πινάκων Αλγόριθµος των Eckmann και Ruelle και «πλαστοί» εκθέτες Lyapunov Αλγόριθµος του Wolf Πρόγραµµα εξέλιξης σταθερού χρόνου για λ
6 Πρόγραµµα εξέλιξης µεταβλητού χρόνου για λ 1 +λ Κριτήρια επιλογής αλγόριθµου του Wolf Householder QR αλγόριθµος Αλγόριθµος του Rosenstein Συνεχής/ ιακριτή διάσπαση QR Πολυπλοκότητα µέσω προβλεπτικότητας σε τυχαία δυναµικά συστήµατα Προβλήµατα στον υπολογισµό των εκθετών Lyapunov Θόρυβος και η αντιµετώπισή του Απαιτήσεις δεδοµένων για τον υπολογισµό των εκθετών Lyapunov Καθολικοί και τοπικοί εκθέτες Lyapunov και η σηµασία τους Μορφοκλασµατικά σχέδια Lyapunov(Lyapunov Fractals) Εφαρµογές των εκθετών Lyapunov Εισαγωγή Εφαρµογή στην Ιατρική Ηλεκτροκαρδιογράφηµα Ηλεκτροεγκεφαλογράφηµα για την πρόβλεψη επιληπτικής κρίσης Εφαρµογή στην Βιολογία Εφαρµογή στην Οικονοµική επιστήµη Χάος σε οικονοµική χρονοσειρά Η αντίθετη άποψη:μη ύπαρξη χάους σε οικονοµική χρονοσειρά Εφαρµογή στην αστρονοµία Εφαρµογή σε χηµικές αντιδράσεις Πειραµατικά αποτελέσµατα Εισαγωγή Ελκυστής του Lorenz Απεικόνιση του Hénon Λογιστική απεικόνιση Απεικόνιση του Ikeda Ελκυστής Rössler Απεικόνιση Duffing Εξίσωση Van der Pol Ταλαντωτής Colpitts Σύστηµα ABC Κύκλωµα Chua Εφαρµογή αλγόριθµων Αλγόριθµος των Wolf et al Σύστηµα Lorenz Σύστηµα Rössler Αλγόριθµος των Eckmann και Ruelle Σύστηµα Lorenz Σύστηµα Rössler Συνδυασµός των αλγορίθµων των Wolf et al. και των Eckmann και 6
7 Ruelle Σύστηµα Lorenz Σύστηµα Rössler Υπολογισµός των εκθετών Lyapunov µε Mathematica Σύστηµα Lorenz Σύστηµα Rössler Aλγόριθµος Rosenstein Ανακεφαλαίωση-Συµπεράσµατα Παραρτήµατα Εισαγωγή Πρόγράµµατα στο Matlab Ελκυστής Lorenz Ελκυστής του Hénon Ελκυστής της απεικόνισης Ikeda Ελκυστής νευρωνικού δικτύου Εκθέτες Lyapunov της λογιστικής απεικόνισης Εκθέτες Lyapunov της απεικόνισης Hénon Εκθέτες Lyapunov µη ισοθερµικής συνάρτησης Εκθέτες Lyapunov του µοντέλου Stewart-McCumber ιάγραµµα διακλάδωσης, αυτοσυσχέτιση κτλ λογιστικής απεικόνισης Μορφοκλασµατικά σχέδια Lyapunov Προγράµµατα σε γλώσσα C Εύρεση ελκυστή χρησιµοποιώντας εκθέτες Lyapunov Εκθέτες Lyapunov του κυκλικού µοντέλου Lorenz µε πέντε µεταβλητές Εκθέτες Lyapunov του συστήµατος υπερχάους του Rössler Εκθέτες Lyapunov για την απεικόνιση Ikeda Προγράµµατα σε άλλες πλατφόρµες Εκθέτες Lyapunov της απεικόνισης Hénon µε πρόγραµµα στα DOS Βιβλιογραφία
8 8 ΚΕΦΑΛΑΙΟ 1 ΕΙΣΑΓΩΓΗ ΣΤΑ ΥΝΑΜΙΚΑ ΣΥΣΤΗΜΑΤΑ 1.1 Βασικοί ορισµοί Μία από τις θεµελιώδεις έννοιες που συναντάµε σχεδόν σε κάθε φυσική επιστήµη, είναι η έννοια του συστήµατος. Σύµφωνα µε ένα γενικό και ευρέως αποδεκτό ορισµό, ένα σύστηµα ορίζεται ως µια συλλογή αντικειµένων που χαρακτηρίζονται από έναν τύπο αλληλεξάρτησης ή αλληλεπίδρασης ([Alligood 1996]). Ένα σύστηµα µπορεί να είναι ανοικτό ή κλειστό, µε κριτήριο την δυνατότητα αλληλεπίδρασής του µε το εξωτερικό περιβάλλον. Η πιο συνηθισµένη λειτουργία του, περιλαµβάνει την λήψη κάποιας εισόδου, την εφαρµογή επί αυτής ενός ή περισσοτέρων µετασχηµατισµών, και την απόδοση µίας ή περισσοτέρων εξόδων. Ως είσοδος του συστήµατος ορίζεται το σύνολο των επιδράσεων που δέχεται από το εξωτερικό περιβάλλον και ως έξοδος το σύνολο των παραµέτρων που αποδίδονται από το σύστηµα στο περιβάλλον του, ως αποτέλεσµα του µετασχηµατισµού που εφαρµόζεται πάνω στην είσοδό του. Στις πιο συνηθισµένες περιπτώσεις, η έξοδος του συστήµατος σε κάθε χρονική στιγµή t, δεν εξαρτάται µόνο από την αντίστοιχη είσοδο, αλλά και από άλλες εισόδους, οι οποίες εισήχθησαν στο σύστηµα σε προηγούµενες χρονικές στιγµές. Η κατάσταση του συστήµατος σε κάθε χρονική στιγµή t, µπορεί να περιγραφεί πλήρως από τον καθορισµό ενός συνόλου παραµέτρων, η κάθε µία από τις οποίες περιγράφεται από τον όρο καταστατική µεταβλητή (state variable). Εάν οι τιµές αυτών των παραµέτρων µεταβάλλονται σε συνάρτηση µε τον χρόνο, το σύστηµα που περιγράφουν ονοµάζεται δυναµικό σύστηµα. Αντίθετα, το σύστηµα ονοµάζεται στατικό, και η κατάσταση του παραµένει χρονικώς αµετάβλητη. Ένα δυναµικό σύστηµα ονοµάζεται αιτιοκρατικό(deterministic), όταν η γνώση των εξισώσεων που περιγράφουν την χρονική του εξέλιξη, επιτρέπει την πρόβλεψη οποιασδήποτε µεταγενέστερης κατάστασης του συστήµατος, εφόσον οι παράµετροι που περιγράφουν την λειτουργία του και οι αρχικές συνθήκες είναι γνωστές. Όταν, όµως ο καθορισµός αυτών των παραµέτρων είναι αδύνατος, το σύστηµα ονοµάζεται στοχαστικό ή τυχαίο(stochastic ή random dynamical system). Ένας δεύτερος διαχωρισµός των δυναµικών συστηµάτων βασίζεται στην συχνότητα εφαρµογής του κανόνα µεταβολής της κατάστασης τους. Εάν αυτή η µεταβολή γίνεται σε διακριτές χρονικές στιγµές, το σύστηµα ονοµάζεται δυναµικό σύστηµα διακριτού χρόνου(discrete time dynamical system) και η χρονική του εξέλιξη περιγράφεται από τις εξισώσεις διαφορών(difference equations). Εάν όµως το χρονικό διάστηµα εφαρµογής του κανόνα µεταβολής τείνει στο µηδέν, το σύστηµα ονοµάζεται δυναµικό σύστηµα συνεχούς χρόνου(continuous time dynamical system) και η χρονική του εξέλιξη περιγράφεται από τις διαφορικές εξισώσεις(differential
9 9 equations). Στην περίπτωση που ο χρόνος δεν εµφανίζεται στις εξισώσεις κίνησης, το σύστηµα ονοµάζεται αυτόνοµο(autonomous), ενώ στην αντίθετη περίπτωση µηαυτόνοµο(non-autonomous)([hilborn 1994]). Επίσης, ανάλογα αν οι εξισώσεις διαφορών ή οι διαφορικές εξισώσεις είναι γραµµικές ή όχι, τα συστήµατα διακρίνονται σε γραµµικά(linear) και στα µηγραµµικά(non linear)([khalil 1996]). Τα πιο πολλά φυσικά συστήµατα είναι µη γραµµικά. Επειδή όµως είναι πολύ δύσκολο να µελετηθούν σε αυτήν την µορφή λόγω της πολυπλοκότητάς τους, τα µετασχηµατίζουµε µε την διαδικασία της γραµµικοποίησης(linearization) ([Shapiro 2002]). Η διαδικασία αυτή κάνει απαλοιφή κάποιων µη γραµµικών όρων, µε αποτέλεσµα το σύστηµα να θεωρείται προσεγγιστικά γραµµικό. Επίσης, µία συνάρτηση της οποίας ο χώρος εισόδου και ο χώρος εξόδου είναι ίδιοι ονοµάζεται απεικόνιση(map). Αν θεωρήσουµε x ένα σηµείο και f µία απεικόνιση, η τροχιά(orbit) του x υπό την f είναι {x,f(x),f 2 (x),. Το σηµείο από το οποίο αρχίζει η τροχιά ονοµάζεται αρχικό σηµείο(initial point) της τροχιάς. Ένα σηµείο p είναι ένα σταθερό σηµείο(fixed point) της απεικόνισης αν f(p)=p. 1.2 Μαθηµατική περιγραφή Μία µεγάλη οµάδα δυναµικών συστηµάτων µπορεί να περιγραφεί µαθηµατικά από ένα σύστηµα n διαφορικών εξισώσεων πρώτης τάξης d x = F ( x, t, c) dt (1.1) Το x είναι ένα διάνυσµα n πραγµατικών συναρτήσεων ως προς το χρόνο t, που συνήθως περιγράφεται από την σχέση x(t) {(x 1 (t), x 2 (t),...,x n (t) (1.2) ή από τον συµβολισµό x R n. Ο χώρος R n λέγεται χώρος φάσεων ή καταστάσεων. Θεωρώντας n τέτοιες εξισώσεις η χρονική εξέλιξη του συστήµατος θα είναι µία καµπύλη ή τροχιά (trajectory). Το σύνολο των τροχιών που αποτελούν τις λύσεις των εξισώσεων κίνησης ενός δυναµικού συστήµατος, συνιστούν το πορτρέτο φάσεων (phase portrait) του συστήµατος. Χρησιµοποιώντας την έννοια του χώρου φάσεων, τέλος διακρίνουµε τα συστήµατα σε δύο κατηγορίες: στα συντηρητικά συστήµατα (conservative systems) η ενέργεια των οποίων παραµένει σταθερή κατά την εξέλιξη τους στο χρόνο, και στα σκεδαστικά συστήµατα (dissipative systems), των οποίων η χρονική εξέλιξη χαρακτηρίζεται από απώλεια ενέργειας που µετατρέπεται σε θερµότητα. Ένα σύστηµα µπορεί να χαρακτηριστεί συντηρητικό ή σκεδαστικό, αρκεί να µελετήσουµε τον τρόπο
10 10 µεταβολής µίας περιοχής του χώρου φάσεων, καθώς το σύστηµα εξελίσσεται στον χρόνο και γνωρίζοντας ότι οι τροχιές που διαγράφουν τα συστήµατα στο χώρο φάσεων συσχετίζονται µε ενεργειακές τιµές. Έτσι, θεωρώντας µία περιοχή του χώρου αυτού, η οποία περιλαµβάνει ένα σύνολο από σηµεία, αυτή η περιοχή στα συντηρητικά συστήµατα θα µείνει σταθερή µε την πάροδο του χρόνου, ενώ στα σκεδαστικά θα συρρικνώνεται συνεχώς µέχρι τελικά να καταλήξει σε µία γεωµετρική δοµή, η οποία µπορεί να περιλαµβάνει ένα ή περισσότερα σηµεία. Σχήµα 1.1: Παράδειγµα συντηρητικού και απωλεστικού συστήµατος 1.3 Μη χαοτικοί ελκυστές Μία από τις σηµαντικές ιδιότητες των απολεστικών δυναµικών συστηµάτων, όσον Τι είναι ο ελκυστής; Ο όρος ελκυστής χρησιµοποείται για το όριο µίας τροχιάς µπροστά στον χρόνο που ελκύει ένα σηµαντικό ποσό αρχικών καταστάσεων. Μία καταβόθρα (sink) είναι ένα παράδειγµα, αφού ελκύει το λιγότερο µία µικρή γειτονιά αρχικών τιµών. Το σύνολο που αποτελείται από την καταβόθρα και µία από τις τροχιές που πλησιάζουν την τροχιά είναι επίσης ένα σύνολο που ελκύει αρχικές καταστάσεις, αλλά για τον λόγο ότι περιέχει την καταβόθρα. Μόνο η καταβόθρα στην πραγµατικότητα χρειάζεται. Ο ελκυστής πρέπει να περιέχει µία πυκνή τροχιά, µία τροχιά που έρχεται αυθαίρετα κοντά σε κάθε σηµείο του ελκυστή και πρέπει να έχει την ιδιότητα ότι ένα σηµείο διαλεγµένο τυχαία πρέπει να έχει µεγαλύτερη από µηδέν πιθανότητα σύγκλισης στο σύνολο.
11 11 αφορά την χρονική εξέλιξη των τροχιών στο χώρο φάσης, είναι ότι αυτές µε την πάροδο του χρόνου πλησιάζουν και τελικά προσεγγίζουν µία συγκεκριµένη περιοχή αυτού του χώρου, η οποία ανάλογα µε την διάσταση του συστήµατος, µπορεί να είναι ένα απλό σηµείο, µια καµπύλη, µια επιφάνεια ή ένας όγκος, και στην γενική περίπτωση µία γεωµετρική δοµή ορισµένη στον χώρο των d διαστάσεων. Αυτή η γεωµετρική δοµή ονοµάζεται ελκυστής (attractor) του σκεδαστικού συστήµατος, καθώς πλήθος τροχιών προσεγγίζουν και προσαρτώνται σε αυτόν. Το σύνολο των αρχικών συνθηκών (τιµών) για τις οποίες παρατηρείται η έλξη λέγεται βάση έλξης του ελκυστή. Ένας ελκυστής ανάλογα µε τις ιδιότητες του που έχει, µπορεί να είναι χαοτικός ή µη χαοτικός. Οι µη χαοτικοί ελκυστές δεν παρουσιάζουν ευαισθησία ως προς τις αρχικές συνθήκες, δηλαδή δύο πολύ κοντινές τροχιές παραµένουν τέτοιες για πολύ µεγάλο χρονικό διάστηµα. Είναι προφανές ότι η εξέλιξη των µη χαοτικών ελκυστών είναι απολύτως προβλέψιµη για οσοδήποτε µεγάλο χρονικό διάστηµα. Ένας µη χαοτικός ελκυστής µπορεί να είναι οριακό σηµείο(σταθερός κόµβος, σταθερή εστία), οριακός κύκλος ή δακτύλιος. Σχήµα 1.2 : Οριακό σηµείο
12 12 Σχήµα 1.3 : Οριακός κύκλος Σχήµα 1.4 : ακτύλιος
13 Ιστορική αναδροµή Μέχρι τις αρχές της δεκαετίας του 1960, οι µόνοι γνωστοί ελκυστές ήταν το οριακό σηµείο, ο οριακός κύκλος και ο δακτύλιος. Το 1963 ο Ε. Lorenz ανακάλυψε ένα µη γραµµικό δυναµικό σύστηµα µε τρεις βαθµούς ελευθερίας, που επιδείκνυε σύνθετη συµπεριφορά, διαφορετική από την αντίστοιχη των µέχρι τότε γνωστών ελκυστών. Η τροχιά του συστήµατος αν και για ένα σύνολο αρχικών συνθηκών(βάσης έλξης) κατέληγε και παρέµεινε σε έναν υπόχωρο του αρχικού 3-διάστατου χώρου φάσεων, δεν έµοιαζε µε καµία από τις οµαλές τροχιές του οριακού σηµείου, οριακού κύκλου και δακτυλίου εµφανίζοντας παράξενες για εκείνη την εποχή ιδιότητες. Ο ελκυστής που είδε ο Lorenz ήταν το πρώτο παράδειγµα χαοτικού η παράξενου ελκυστή, και το αντίστοιχο δυναµικό σύστηµα διαφορικών εξισώσεων το πρώτο παράδειγµα χαοτικού συστήµατος. Ένα χρόνο αργότερα, ο Γάλλος αστρονόµος Michel Hénon µελετώντας οµάδες αστέρων, ανακάλυψε ένα νέο τύπο ελκυστή που του έδωσε και το όνοµά του. Στις αρχές της δεκαετίας του 1970, ο Αυστραλός Robert May, χρησιµοποίησε την λογιστική εξίσωση ως ένα µοντέλο ανάπτυξης πληθυσµών έµβιων όντων, και διαπίστωσε πως αυτή µπορεί να οδηγήσει σε χρονοσειρές που παρουσιάζουν χαοτικό χαρακτήρα. Αποτέλεσµα αυτής της έρευνας, ήταν η ανακάλυψη του οµώνυµου ελκυστή. 1.5 Χαοτικά συστήµατα Τα χαοτικά συστήµατα αποτελούν µία ξεχωριστή αυτοδύναµη κατηγορία δυναµικών συστηµάτων, που µπορεί να τοποθετηθεί µεταξύ αιτιοκρατικών και στοχαστικών συστηµάτων. Αν και φαίνονται στοχαστικά όταν παρατηρούνται, παρόλα αυτά περιγράφονται µαθηµατικά από µη γραµµικές διαφορικές εξισώσεις(ροές) ή από µη γραµµικές εξισώσεις διαφορών(απεικονίσεις) και ανήκουν στην κατηγορία των µη γραµµικών απωλεστικών συστηµάτων. Η τροχιά τους για ένα σύνολο αρχικών συνθηκών που αποτελούν την βάση έλξης, περιορίζεται σε έναν υπόχωρο του χώρου φάσεων που στην προκειµένη περίπτωση επειδή εµφανίζει πρωτότυπες(παράξενες) ιδιότητες λέγεται παράξενος ελκυστής. Αν και ο χώρος που εξελίσσεται η τροχιά είναι περιορισµένος, αυτή δεν διέρχεται ποτέ από το ίδιο σηµείο δύο φορές, δηλαδή δεν κόβει τον εαυτό της, έχει άπειρο µήκος, είναι απεριοδική και αυτό φαίνεται στο φάσµα ισχύος µιας µεταβλητής του συστήµατος που είναι συνεχές. Μία χαρακτηριστική ιδιότητα των χαοτικών συστηµάτων είναι η πολύ µεγάλη ευαισθησία τους από τις αρχικές συνθήκες. ύο τροχιές µε σχεδόν ταυτόσηµες αρχικές συνθήκες µένουν µόνο για µικρό χρονικό διάστηµα γειτονικές και αποκλίνουν γρήγορα εκθετικά. Άρα µικροσκοπικές διαταραχές µεγεθύνονται ραγδαία και επηρεάζουν την µακροπρόθεσµη συµπεριφορά του συστήµατος. Αυτή η συµπεριφορά είναι ποιοτικά διαφορετική για µη χαοτικούς ελκυστές, όπου οι γειτονικές τροχιές παραµένουν πλησίον η µία στην άλλη και οι µικρές διαταραχές δεν αυξάνονται.
14 Το κλειδί για την κατανόηση της χαοτικής συµπεριφοράς έγκειται στην κατανόηση µιας απλής διαδικασίας τεντώµατος και διπλώµατος, που λαµβάνει χώρα στον χώρο φάσεων. Η εκθετική απόκλιση είναι µία τοπική ιδιότητα, καθόσον οι ελκυστές έχουν πεπερασµένο µέγεθος και δύο τροχιές ενός χαοτικού ελκυστή δεν µπορούν να αποκλίνουν εκθετικά για πάντα. Άρα ο ελκυστής πρέπει να αναδιπλώνεται στον εαυτό του. Αν και οι τροχιές αποκλίνουν και ακολουθούν διαφορετικές κατευθύνσεις, επανέρχονται τελικά πάλι η µία πλησίον της άλλης. Η ιδιότητα της ευαισθησίας των χαοτικών συστηµάτων από τις αρχικές συνθήκες έχει ως αποτέλεσµα την περιορισµένη χρονικά πρόβλεψή τους. Καταρχήν, ένα χαοτικό σύστηµα είναι ντετερµινιστικό µε την έννοια ότι περιγράφεται από συγκεκριµένες µαθηµατικές εξισώσεις και άρα γνωρίζοντας ακριβώς την αρχική συνθήκη είναι δυνατόν να βρεθούν οι επόµενες στιγµές και βασικά το σύστηµα να προβλεφθεί για άπειρο χρονικό διάστηµα. Όµως στην πράξη προσκρούουµε σε δύο αξεπέραστα προβλήµατα. Πρώτα από όλα σχεδόν ποτέ δεν γνωρίζουµε τελείως την αρχική συνθήκη, λόγω των σφαλµάτων που υπεισέρχονται κατά την διαδικασία της µέτρησης. Σχεδόν πάντα υπάρχει µία µικρή απόκλιση από την πραγµατική αρχική συνθήκη, που δηµιουργεί ένα µικρό αρχικό σφάλµα, έτσι ακόµα και αν γνωρίζουµε ακριβώς τους νόµους εξέλιξης του συστήµατος, εξαιτίας της εκθετικής απόκλισης των τροχιών(πραγµατικής και προβλεπόµενης) το σφάλµα µεγεθύνεται και η προβλεπτικότητα του συστήµατος χάνεται µετά από λίγες προβλεπόµενες τιµές. Επιπλέον ακόµα και αν γνωρίζουµε ακριβώς την αρχική συνθήκη, λόγω καθαρά υπολογιστικών προβληµάτων είναι αδύνατη µια µακρόχρονη πρόβλεψη, επειδή καθώς οι προβλεπόµενες τιµές θα αυξάνονται, ο υπολογιστής είναι υποχρεωµένος να εκτελεί πράξεις µε αριθµούς που αποτελούνται από συνεχώς αυξανόµενα ψηφία, το οποίο είναι πρακτικά αδύνατο. Έτσι σε κάποιο σηµείο της διαδικασίας λόγω αποκοπής ψηφίων θα υπεισέλθει ένα µικρό σφάλµα το οποίο πάλι θα αυξάνει συγκριτικά σε σχέση µε τον χρόνο µε αποτέλεσµα την απώλεια πρόβλεψης. Άρα, γενικά µπορούµε να καταλήξουµε στα τελικά συµπεράσµατα για το ότι ένα δυναµικό σύστηµα µπορεί να χαρακτηρισθεί ως χαοτικό, όταν παρουσιάζει τις παρακάτω ιδιότητες: παρουσιάζει απεριοδική συµπεριφορά ασυµπτωτική ως προς τον χρόνο. Αυτή η ιδιότητα προϋποθέτει την ύπαρξη τροχιών στον χώρο των φάσεων, οι οποίες δεν καταλήγουν σε σταθερά σηµεία ή σε άλλες περιοδικές τροχιές. Επίσης, οι τροχιές αυτές πρέπει να είναι φραγµένες. είναι αιτιοκρατικό, δεν περιέχει τυχαίες συνιστώσες. Έτσι, όταν η χρονική εξέλιξη του συστήµατος παρουσιάσει στοχαστικά χαρακτηριστικά, αυτά θα οφείλονται σε χαοτικό παράγοντα και όχι στον θόρυβο. χαρακτηρίζεται από ευαισθησία στις αρχικές συνθήκες. Αυτό σηµαίνει πως δύο τροχιές που ξεκινούν από γειτονικές αρχικές συνθήκες, αποµακρύνονται µε εκθετικούς ρυθµούς σε συνάρτηση µε το χρόνο. Αυτό, όπως θα δούµε στην συνέχεια, προϋποθέτει πως το σύστηµα θα χαρακτηρίζεται από την ύπαρξη ενός τουλάχιστον θετικού εκθέτη Lyapunov. 14
15 15 Στην περίπτωση των δυναµικών συστηµάτων συνεχούς χρόνου, οι αναγκαίες συνθήκες για την εµφάνιση χαοτικής συµπεριφοράς-δηλαδή φραγµένες τροχιές υψηλής πυκνότητας που να αποµακρύνονται η µία από την άλλη µε εκθετικό ρυθµό χωρίς να τέµνονται- ικανοποιούνται ταυτόχρονα µόνο σε χώρους m διαστάσεων µε m 3. Αυτό σηµαίνει ότι η χαοτική συµπεριφορά εµφανίζεται µόνο στα δυναµικά συστήµατα τριών διαστάσεων, ενώ αντίθετα απουσιάζει από τα συστήµατα που είναι ορισµένα στην µία και στις δύο διαστάσεις. Αντίθετα, στην περίπτωση των δυναµικών συστηµάτων διακριτού χρόνου, το φαινόµενο του χάους εµφανίζεται τόσο στην µία διάσταση(περίπτωση λογιστικής απεικόνισης), όσο και στις δύο διαστάσεις (περίπτωση απεικόνισης Hénon). 1.6 Μηχανισµοί µετάβασης στο χάος Ένα ενδιαφέρον θέµα πάνω στην θεωρία των χαοτικών συστηµάτων συνεχούς και διακριτού χρόνου είναι ο τρόπος και οι συνθήκες κάτω από τις οποίες εµφανίζεται η χαοτική συµπεριφορά. Αυτοί οι µηχανισµοί µετάβασης στο χάος(chaos transition mechanisms) ποικίλλουν από σύστηµα σε σύστηµα και η πλήρης ερµηνεία τους δεν είναι ακόµα ολοκληρωµένη. Αυτό συµβαίνει γιατί τα χαοτικά συστήµατα περιέχουν µη γραµµικές συνιστώσες, και εποµένως η πλήρης ανάλυση της συµπεριφοράς τους δεν είναι δυνατή. Οι µηχανισµοί µετάβασης των δυναµικών συστηµάτων στην χαοτική περιοχή χωρίζονται σε δύο κατηγορίες µε κριτήριο το ποσοστό των φάσεων που επηρεάζουν. Το πιο χαρακτηριστικό παράδειγµα µηχανισµού που ανήκει στην πρώτη κατηγορία είναι το φαινόµενο της επαναληπτικής εµφάνισης ενός µετασχηµατισµού, που είναι γνωστό ως διακλάδωση(bifurcation). Επειδή οι µηχανισµοί µετάβασης αυτού του είδους συσχετίζονται µε ένα πολύ µικρό ποσοστό της έκτασης που καταλαµβάνει το σύστηµα στο χώρο των φάσεων, είναι γνωστοί µε το όνοµα τοπικές διακλαδώσεις(local bifurcations). Αντίθετα, η άλλη κατηγορία µηχανισµών, περιλαµβάνει µεταβολές των τροχιών του συστήµατος οι οποίες γενικά εκτείνονται σε πολύ µεγάλη περιοχή του χώρου των φάσεων, και γι αυτό ονοµάζονται καθολικές διακλαδώσεις(global bifurcations). 1.7 Ανακατασκευή του χώρου φάσεων Όπως αναφέραµε προηγουµένως, η χρονική εξέλιξη τόσο των δυναµικών συνεχών συστηµάτων όσο και των διακριτών περιγράφεται από ένα σύνολο διαφορικών εξισώσεων, το πλήθος των οποίων είναι ίσο µε την διάσταση του συστήµατος. Γνωρίζοντας τις εξισώσεις κίνησης υπάρχει µία απλή τεχνική για τον υπολογισµό ενός πλήρους φάσµατος Lyapunov και γενικότερα, µπορούµε να υπολογίσουµε οτιδήποτε στο σύστηµα. Όµως, στην γενική περίπτωση δεν γνωρίζουµε την φύση και τα χαρακτηριστικά του δυναµικού συστήµατος εκ των προτέρων, αλλά µας δίνεται µία ακολουθία τιµών για ανάλυση. Κατ αρχάς, το σύνολο πρέπει να
16 16 αποτελεί χρονοσειρά, δηλαδή οι µετρήσεις εξαρτώνται µόνο από τον χρόνο και όχι από των χώρο. Άρα, πρέπει να ελέγξουµε αν οι µετρήσεις έγιναν στο ίδιο σηµείο του φυσικού ή εργαστηριακού συστήµατος. Σχήµα 1.5 : Χρονοσειρά Ο χρόνος δειγµατοληψίας των µετρήσεων πρέπει να είναι σταθερός προκειµένου να υπολογιστούν διάφορα µεγέθη. Αν ορισµένες µετρήσεις απέχουν περισσότερο χρονικό διάστηµα από τον χρόνο δειγµατοληψίας τότε οι αντίστοιχες κενές θέσεις µπορεί να καλυφτούν µε κάποια µέθοδο παρεµβολής. Το πλήθος των σηµείων που µπορούµε να παρεµβάλουµε χωρίς να αλλοιώσουµε την δοµή του σήµατος εξαρτάται από το είδος του. Όσο πιο τυχαίο φαίνεται το σήµα τόσο πιο λίγα σηµεία µπορούµε να παρεµβάλουµε. Εφόσον το πλήθος των διαστάσεων του συστήµατος είναι γνωστό, ο αριθµός των δειγµάτων που καταγράφουµε σε κάθε χρονική στιγµή, είναι συγκεκριµένος και καθορισµένος. Τι συµβαίνει όµως στην περίπτωση κατά την οποία δεν γνωρίζουµε το σύνολο των διαστάσεων του συστήµατος; Μία γνωστή και ευρέως χρησιµοποιούµενη τεχνική για την αντιµετώπιση αυτών των δυσκολιών είναι η ανακατασκευή του χώρου φάσεων. Η τεχνική αυτή στηρίζεται στην παρατήρηση πως η δυναµική ενός συστήµατος ορισµένου σε ένα αφηρηµένο γεωµετρικό χώρο n διαστάσεων, R n, µπορεί να καθοριστεί πλήρως, ακόµα και αν το µόνο που διαθέτουµε από το σύστηµα είναι η πειραµατική καταγραφή των τιµών κάποιας από τις παραµέτρους που το περιγράφουν [(Pachard 1980)]. Χρησιµοποιώντας αυτή τη µία χρονοσειρά, έχουµε την δυνατότητα να ανακατασκευάσουµε πλήρως όλα τα χαρακτηριστικά του συστήµατος.

17 17 Η µέθοδος εµβύθισης συντεταγµένων χρονικής υστέρησης που δηµιουργήθηκε από τον Takens παρέχει µία πρακτική λύση. Το θεώρηµα εµβύθισης του Takens εγγυάται ότι µία τοπολογική ισοδυναµία του χώρου φάσης του άγνωστου δυναµικού συστήµατος µπορεί να ανακατασκευαστεί από χρονοσειρά. Αυτή η µέθοδος είναι η εξής: Από κάθε µετρούµενη χρονοσειρά u i (t)(i=1,l), το ακόλουθο διάνυσµα κατασκευάζεται από q παράγοντες: όπου τ είναι ο χρόνος καθυστέρησης. Αφού υπάρχουν l στοιχεία χρονοσειράς, ένα διάνυσµα µε m=ql παράγοντες µπορεί να κατασκευαστεί: όπου m είναι η διάσταση εµβύθισης. Σαφώς, ο χρόνος καθυστέρησης τ και η διάσταση εµβύθισης m είναι οι δύο θεµελιώδεις παράµετροι στην µέθοδο εµβύθισης συντεταγµένων χρονικής υστέρησης. (1.3) (1.4) Σχήµα 1.6: ιαδικασία ανακατασκευή χώρου φάσεων
18 Χρόνος καθυστέρησης τ Ο χρόνος καθυστέρησης πρέπει να επιλεχθεί προσεκτικά. Αν το τ είναι πολύ µικρό, τότε οι γειτονικοί παράγοντες και θα είναι πολύ συσχετισµένοι για να θεωρούνται ανεξάρτητες συντεταγµένες. Αν, από την άλλη, το τ είναι πολύ µεγάλο, οι γειτονικοί παράγοντες είναι πολύ ασυσχέτιστοι για αυτό τον λόγο. Εµπειρικά, µπορούµε να εξετάσουµε την συνάρτηση αυτοσυσχέτισης και να αποφασίσουµε για ένα κατάλληλο χρόνο καθυστέρησης([theiler 1986]) ιάσταση εµβύθισης m Για να έχουµε µία αξιόπιστη αναπαράσταση ενός αληθινού δυναµικού συστήµατος, η διάσταση εµβύθισης m πρέπει να είναι επαρκώς µεγάλη. Το θεώρηµα του Takens παρέχει ένα κατώτερο όριο για το m. Συγκεκριµένα, έστω ότι το δυναµικό σύστηµα βρίσκεται σε ένα d-διάστατο υπόχωρο. Τότε, αν m>2d, τα m-διάστατα ανακατασκευασµένα διανύσµατα x(t) έχουν µία-προς-µία αντιστοίχηση στα διανύσµατα του αληθινού δυναµικού συστήµατος, αλλά δεν είναι πάντα αναγκαία. Γενικά, θεωρούµε m>2d +1, αλλά από πλευράς φυσικής χρειάζεται περισσότερο προσοχή. ύο προβλήµατα προκύπτουν στην πράξη όταν εργαζόµαστε µε διαστάσεις εµβύθισης µεγαλύτερης της αναγκαίας: Πρώτο πρόβληµα είναι ότι όσο αυξάνει η m τόσο αυξάνει και ο υπολογιστικός χρόνος για τον υπολογισµό διάφορων µεγεθών. εύτερο πρόβληµα είναι ότι οι επί πλέον διαστάσεις που είναι µεγαλύτερες από την αναγκαία, καλύπτονται από θόρυβο που συνήθως υπάρχει στο παρατηρούµενο σήµα, και όχι από την δυναµική του σήµατος που ενυπάρχει στην αναγκαία διάσταση.
19 19 ΚΕΦΑΛΑΙΟ 2 ΕΚΘΕΤΕΣ LYAPUNOV 2.1 Γενική θεωρητική προσέγγιση Οι εκθέτες Lyapunov αποτελούν ένα αλγοριθµικό και υπολογιστικό µοντέλο, ένα ποσοτικό µέτρο του βαθµού της χαοτικής κίνησης µιας τροχιάς. Μιλώντας πρόχειρα, οι εκθέτες Lyapunov µίας τροχιάς χαρακτηρίζουν τον µέσο όρο της εκθετικής απόκλισης των γειτονικών τροχιών της από αυτή. Ο χαρακτηρισµός της χαοτικής κίνησης των τροχιών στον χώρο φάσεων όσον αφορά την απόκλιση των γειτονικών τροχιών παρουσιάσθηκε πρώτα από τους Hénon και Heiles(1964) και µελετήθηκε περεταίρω από τους Zaslavski και Chirikov(1972), Froeschle και Scheidecker(1973), και Ford(1975) αλλά και άλλους. Η θεωρία των εκθετών Lyapunov(1907) εφαρµόστηκε για να χαρακτηρίσει χαοτικές τροχιές από τον Oseledec(1968). Η σύνδεση µεταξύ εκθετών Lyapunov και εκθετικής απόκλισης δόθηκε πρώτα από τον Benettin(1976) και από τον Pesin(1977). H διαδικασία για τον υπολογισµό των εκθετών Lyapunov αναπτύχθηκε από τους Benettin et al.(1980). Η µελέτη του φάσµατος των εκθετών Lyapunov είναι από τα πλέον χρήσιµα εργαλεία για να αποφανθούµε αν ένα δυναµικό σύστηµα είναι χαοτικό ή όχι. Εξορισµού, ένα ντετερµινιστικό δυναµικό σύστηµα είναι χαοτικό όταν έχει τουλάχιστον ένα θετικό εκθέτη Lyapunov. Ένα δυναµικό σύστηµα n διαστάσεων έχει n εκθέτες Lyapunov, που περιγράφουν την δράση της δυναµικής που προσδιορίζει την εξέλιξη των τροχιών στο χώρο φάσεων. Οι εκθέτες Lyapunov εκφράζουν τον µέσο ρυθµό σύγκλισης ή απόκλισης δύο γειτονικών τροχιών στο χώρο των φάσεων. Θετικός εκθέτης Lyapunov συνεπάγεται εκθετικά απόκλιση δύο γειτονικών τροχιών(ευαισθησία ως προς τις αρχικές συνθήκες) και άρα απώλεια προβλεπτικότητας µετά από µικρό χρονικό διάστηµα. Όσο µεγαλύτερος είναι ο εκθέτης Lyapunov σε µία περιοχή ενός δυναµικού συστήµατος τόσο µικρότερη είναι η προβλεπτικότητα σε αυτήν την περιοχή. Αφού ο ελκυστής βρίσκεται σε περιορισµένο τµήµα του χώρου φάσεων(είναι φραγµένος) άρα εκθετική απόκλιση δεν είναι δυνατή προς όλες τις κατευθύνσεις. Συστολές και αναδιπλώσεις πρέπει να συµβαίνουν και αυτή η συµπεριφορά αντιστοιχεί σε αρνητικό εκθέτη Lyapunov. Αν η δυναµική ενός συστήµατος περιγράφεται από διαφορικές εξισώσεις, τότε αποδεικνύεται ότι ένας εκθέτης θα είναι µηδέν, που αντιστοιχεί σε µια διαταραχή κατά µήκος του διανυσµατικού πεδίου που εφάπτεται της τροχιάς.
 οριακός κύκλος µε φάσµα (0,-,-) δισδιάστατος δακτύλιος µε φάσµα")
20 20 Σχήµα 1.7: ύο αρχικά γειτονικά σηµεία, που διαχωρίζονται καθώς ο χρόνος αυξάνει. Τα πρόσηµα των εκθετών Lyapunov δίνουν µία ποιοτική εικόνα της δυναµικής ενός συστήµατος. Σε ένα τρισδιάστατο χώρο φάσεων, οι πιθανοί τύποι ελκυστών και τα αντίστοιχα φάσµατα αυτών είναι: οριακό σηµείο µε φάσµα (-,-,-) οριακός κύκλος µε φάσµα (0,-,-) δισδιάστατος δακτύλιος µε φάσµα (0,0,-) παράξενος ελκυστής µε φάσµα (+,0,-).. Σχήµα 1.8: a)συστελλόµενη κατεύθυνση λ 1 >0,b) πιο αργή από εκθετική κατεύθυνση λ 2 =0 c)συστελλόµενη κατεύθυνση λ 3 <0 για το 3-διάστατο σύστηµα του Lorenz. Από την άλλη, ένα 4-διάστατο συνεχές απωλεστικό σύστηµα έχει 3 πιθανά είδη χαοτικών ελκυστών µε φάσµατα:(+,+,0,-),(+,0,0,-) κα (+,0,-,-). Για ένα δεδοµένο σύστηµα µία αλλαγή στις παραµέτρους γενικά θα αλλάξει το φάσµα Lyapunov και µπορεί επίσης να αλλάξει και το είδος του φάσµατος και το είδος του ελκυστή.
21 21 Τα µεγέθη των εκθετών Lyapunov ποσοτικοποιούν την δυναµική συµπεριφορά ενός ελκυστή σε θεωρητικούς όρους πληροφορίας. Οι εκθέτες µετρούν τον ρυθµό στον οποίο οι διαδικασίες του συστήµατος δηµιουργούν ή καταστρέφουν πληροφορία. Έτσι, οι εκθέτες εκφράζονται σε bits πληροφορίας ή bits/τροχιά για ένα συνεχές σύστηµα και bits/ επανάληψη για τα διακριτά συστήµατα. Ο µέσος ρυθµός µε τον οποίο η πληροφορία που περιέχεται στις µεταβάσεις χάνεται µπορεί να καθοριστεί από τους αρνητικούς εκθέτες. Η ασυµπτωτική φθορά µίας διαταραχής στον ελκυστή ελέγχεται από τον ελάχιστο αρνητικό εκθέτη, που εποµένως πρέπει να είναι ο ευκολότερος των αρνητικών εκθετών που εκτιµάται. Όταν ένα χαοτικό σύστηµα έχει δύο ή περισσότερους θετικούς εκθέτες Lyapunov τότε χαρακτηρίζεται από υπερχάος. Αν θεωρήσουµε µία διαταραχή V(0) ενός αρχικού όγκου V στον χώρο των φάσεων τότε αποδεικνύεται ότι η εξέλιξη της διαταραχής θα δίνεται από την σχέση (1.5) όπου C=λ 1 +λ λ n είναι το άθροισµα των εκθετών Lyapunov. Για ένα απωλεστικό σύστηµα και άρα για ένα χαοτικό επειδή συµβαίνει συστολή του όγκου V δηλαδή V 0 όταν t, έπεται ότι λ 1 +λ λ n < 0, δηλαδή το άθροισµα των εκθετών Lyapunov ενός χαοτικού συστήµατος είναι αρνητικό. Για ένα συντηρητικό σύστηµα όπου δεν υπάρχει συστολή όγκου των τροχιών ισχύει V(t)= V(0) και άρα λ 1 +λ λ n = 0, δηλαδή το άθροισµα των εκθετών Lyapunov είναι µηδέν. 2.2 Φάσµα Lyapunov Ορισµός του φάσµατος Lyapunov εδοµένου ενός δυναµικού συνεχούς συστήµατος σε ένα n-διάστατο χώρο φάσεων, καταγράφουµε την εξέλιξη µιας αρχικής σφαίρας που αντιστοιχεί σε ένα σύνολο αρχικών συνθηκών. Παρατηρούµε ότι η σφαίρα γίνεται ένα n-διάστατο ελλειψοειδές εξαιτίας της τοπικής φύσης της ροής του συστήµατος που δρα παραµορφωτικά πάνω σε αυτή. Ο i ος εκθέτης Lyapunov ορίζεται από την σχέση (1.6) όπου P i είναι ο i oς κύριος άξονας του ελλειψοειδούς. Οι εκθέτες Lyapunov είναι διατεταγµένοι από τον µεγαλύτερο προς τον µικρότερο δηλ. λ 1 >λ 2 >...>λ n. Ο µεγαλύτερος άξονας του ελλειψοειδούς αντιστοιχεί στην πλέον ασταθή κατεύθυνση της ροής και ο ασυµπτωτικός ρυθµός διαστολής του εκφράζει τον µέγιστο εκθέτη Lyapunov. Οι εκθέτες Lyapunov µπορούν να θεωρηθούν σαν µέτρα του ρυθµού αύξησης των υποχώρων του χώρου φάσεων. Ο λ 1 µετρά πόσο γρήγορα αυξάνουν οι
22 22 γραµµικές αποστάσεις, ενώ το άθροισµα των λ 1, λ 2 εκφράζει τον ρυθµό µεταβολής µιας επιφάνειας. Γενικά ο ρυθµός µεταβολής ενός d-διάστατου όγκου εκφράζεται σε σχέση µε το άθροισµα των d πρώτων εκθετών. Παρατηρούµε ότι η γραµµική έκταση του ελλειψοειδούς µεγαλώνει κατά, το εµβαδόν που ορίζεται από τους πρώτους 2 κύριους άξονες µεγαλώνει κατά, ο όγκος που ορίζεται από τους πρώτους 3 κύριους άξονες µεγαλώνει κατά κοκ. Αυτή η ιδιότητα αποφέρει ακόµα έναν ορισµό του φάσµατος των εκθετών: το άθροισµα των πρώτων j εκθετών ορίζεται από τον εκθετικό ρυθµό αύξησης ενός στοιχείου j-όγκου. Αυτός ο διαφορετικός αριθµός θα παρέχει την βάση της φασµατικής µας τεχνικής για πειραµατικά δεδοµένα ιάσταση Lyapunov To φάσµα των εκθετών Lyapunov συσχετίζεται άµεσα µε µία από τις πολλές διαφορετικού τύπου κλασµατικές διαστάσεις που υπολογίζουν µε ποσοτικό τρόπο το µέγεθος ενός χαοτικού ελκυστή. Σύµφωνα µε την µεθοδολογία που αναπτύχθηκε από τους Kaplan και Yorke, το φάσµα των εκθετών Lyapunov συσχετίζεται µε ένα ειδικό τύπο διάστασης που είναι γνωστή ως διάσταση Lyapunov και δίνεται από την σχέση (1.7) όπου η σταθερά j ορίζεται από τις συνθήκες και. 2.3 Αριθµητική προσέγγιση εκθετών Lyapunov Στις πιο συνηθισµένες περιπτώσεις δυναµικών συστηµάτων, δεν υπάρχει κάποιος τυπικός και εύκολος τρόπος για τον υπολογισµό των εκθετών Lyapunov, γι αυτό και καταφεύγουµε σε έµµεσες µεθόδους, που στηρίζονται στις µεθόδους ορθογωνιοποίησης των διανυσµάτων βάσης, όπως είναι η µέθοδος ορθογωνιοποίησης Gram-Schmidt και µπορούν να εφαρµοστούν και σε συνεχή και σε διακριτά δυναµικά συστήµατα. Το παραπάνω συµβαίνει όταν γνωρίζουµε τις εξισώσεις κίνησης. Όταν, όµως, δεν τις γνωρίζουµε, και το µόνο που διαθέτουµε είναι µία πειραµατικώς καταγεγραµµένη χρονοσειρά, µπορούµε να προχωρήσουµε στον υπολογισµό των εκθετών Lyapunov απευθείας από τα πειραµατικά δεδοµένα. Υπάρχουν πολλοί αλγόριθµοι που µπορούµε να χρησιµοποιήσουµε για αυτόν τον υπολογισµό και εµφανίζονται παρακάτω.
23 Αλγόριθµος των Benettin et al. Ένα µη γραµµικό σύστηµα διαφορικών εξισώσεων ) (1.8) µπορεί να ολοκληρωθεί αριθµητικά για να παράγει µία τροχιά x(x 0,t), µία συνάρτηση του χρόνου, και τις αρχικές συνθήκες x(t 0 )= x 0 στον αρχικό χρόνο. Γειτονικές τροχιές υπακούουν στις µεταβαλλόµενες εξισώσεις df δ x& = δx = A( t) δx dx x ( t ) (1.9) όπου το δx είναι η απειροστή µετατόπιση από την τροχιά αναφοράς. Αυτό είναι ένα σύνολο γραµµικών διαφορικών εξισώσεων εξαρτώµενων από τον χρόνο, και η ευστάθειά τους καθορίζεται στην γενική περίπτωση από τους εκθέτες Lyapunov. Ο πρώτος επιτυχής αλγόριθµος για τον υπολογισµό ολόκληρου του φάσµατος των εκθετών Lyapunov οφείλεται στον Benettin και στους συνεργάτες του και στους Shimada και Nagashima. Η µέθοδος αυτή αρχίζει ολοκληρώνοντας Ν λύσεις αναφοράς u k (t) στην (1.9) για ένα χρονικό διάστηµα τ, αρχίζοντας από αρχικές συνθήκες u k (t 0 )= e k (t 0 ), µία ορθοκανονική βάση. Στο τέλος του χρονικού διαστήµατος, οι όγκοι των k-διάστατων παραλληλεπιπέδων(k=1,2,,n) καλυπτόµενων από τα διανύσµατα u k (t) υπολογίζονται από την σχέση V k = k u j= 1 j ( t) (1.10) όπου ^ είναι το εξωτερικό γινόµενο και είναι η νόρµα. Σε αυτό το σηµείο, τα διανύσµατα u k (t) ορθοκανονικοποιούνται από την διαδικασία Gram-Schmidt. Αυτό σηµαίνει ότι νέα ορθοκανονικά διανύσµατα e k (t 0 +τ) υπολογίζονται. H διαδικασία Gram-Schmidt αφήνει αµετάβλητους τους k-διάστατους υποχώρους καλυπτόµενους από τα u k κατά την δηµιουργία των k-διάστατων υποχωρών καλυπτόµενων από τα. Η ολοκλήρωση µετά ξαναρχίζει µε νέο u k (t 0 +τ) = e k (t 0 +τ) και συνεχίζεται για t = t 0 + 2τ. Οι k- διάστατοι εκθέτες Lyapunov δίνονται από τα όρια
24 24 λ ( k) 1 = lim lnv ( t n k nτ j= 1 lnv k( t0 n 0 + jτ) + ( j 1) τ) (1.11) αρκεί τα όρια αυτά να υπάρχουν. Έπειτα, θεωρώντας τ= δt, η σχέση γίνεται 1 ( k ) 1 ln ( + ) ln ( ) = lim n Vk ti δt Vk ti λ { n n i= 0 δt (1.12) Αλλά στο όριο, αυτό γίνεται ( k ) 1 d 1 λ = lim lnvk ( ) d = lim { lnvk ( t) lnvk ( t0) t t τ τ (1.13) dt t t t 0 t t 0 Αυτό δηλώνει ότι ο εκθέτης Lyapunov είναι ο µέσος λογαριθµικός ρυθµός αύξησης του όγκου V k. Όµως, επειδή θεωρούµε τον αρχικό όγκο V k (t 0 )=1, άρα lnv k (t 0 )=0 και η σχέση γίνεται ( k ) 1 λ = lim lnvk ( t) (1.14) t t t0 Οι µονοδιάστατοι εκθέτες Lyapunov λ k συνδέονται µε τους k-διάστατους εκθέτες t k 0 λ j ( k) λ = (1.15) j= 1 Έτσι, αν οι µονοδιάστατοι εκθέτες ζητούνται, η εξίσωση d lnv dt k = k j= 1 e j Ae j (1.16) που προκύπτει επειδή V 1 =(u 1 u 1 ) 1/2, u 1 = e 1, V 1 =1 και u & 1 = Au1, αντικαθίσταται από την d dt S e Ae ln k = k k (1.17) µε αρχική συνθήκη lns k (t 0 )=0. Έτσι, οι µονοδιάστατοι εκθέτες Lyapunov δίνονται από την σχέση ( k) 1 λ = lim ln Sk ( t) (1.18) t t t Ένα πιθανό πρόβληµα µε αυτόν τον αλγόριθµο είναι ότι όλα τα διανύσµατα u k τείνουν προς την κατεύθυνση του χώρου που είναι συνδεδεµένη µε τον µεγαλύτερο θετικό εκθέτη Lyapunov. Αν ο χρόνος κανονικοποίησης τ είναι µεγάλος, η διαδικασία Gram-Schmidt µπορεί να αποτύχει, ή να γίνει ανακριβής. Έτσι, για να διαλέξουµε το τ, βοηθά να ξέρουµε ήδη τον µεγαλύτερο θετικό εκθέτη. 0
25 Παραγοντοποίηση πραγµατικών πινάκων Η γενική λύση του συστήµατος (1.8) συνήθως γράφεται ως πίνακας Φ, που ονοµάζεται θεµελιώδης πίνακας. Υπακούει στην σχέση Φ& = Α( tφ ), Φ( t ) = I (1.19) Η παραγοντοποίηση του θεµελιώδους πίνακα Φ είναι Φ ( t ) = E( t) W( t) (1.20) Όπου ο Ε(t) είναι ορθοκανονικός και ο W(t) είναι άνω τριγωνικός. (Θεωρητικά, η σωστή παραγοντοποίηση του Φ είναι είτε παίρνοντας Ε(t 0 )=I ή γράφοντας Τ Φ ( t ) = E ( t ) W ( t ) Ε ( t 0 ) ). Αυτή η παραγοντοποίηση πάντα υπάρχει αν ο Φ είναι non-singular, και ο αλγόριθµος για να το παράγει δεν είναι τίποτα εκτός από την διαδικασία Gram- Schmidt. Αν παραγωγίσουµε την (1.20), θα έχουµε T T Ε & W+ EW& = AEW W& = E AE E E& W = U t ) W W& T ( ) ( = UWκαι E E & T = E AE U (1.21) Εποµένως, προκύπτει ότι οι µονοδιάστατοι εκθέτες Lyapunov δίνονται από την σχέση t Παραγοντοποίηση µιγαδικών πινάκων t 0 1 λ = i lim ei Aeidt (1.22) t Η µορφή συνεχούς χρόνου του «πρότυπου» αλγόριθµου για τους εκθέτες Lyapunov επεκτείνεται για να συµπεριλάβει ένα φανταστικό µέρος. Όµως, ενώ ο αλγόριθµος είναι ισχυρά ευσταθής στο να συγκλίνει στα πραγµατικά µέρη των χαρακτηριστικών εκθετών του συστήµατος, θα παράγει τυχαία πραγµατικά µέρη. Η επιλογή του αρχικού ορθοκανονικού πίνακα είναι κρίσιµη: οι ειδικές αρχικές συνθήκες που οδηγούν στα σωστά φανταστικά µέρη για τις περιπτώσεις του σταθερού συντελεστή και του περιοδικού πρέπει να έχουν βρεθεί. Χωρίς τρόπο να βρούµε τις ειδικές αρχικές ορθοκανονικές συνθήκες για την γενική χρονική εξαρτώµενη περίπτωση, το φανταστικό µέρος του εκθέτη Lyapunov παραµένει δύσκολο να υπολογιστεί. είξαµε ότι αυτός ο αλγόριθµος κατέχει µία αληθινή µορφή συνεχούς χρόνου, και ότι αυτή η µέθοδος ήταν πλήρως ισοδύναµη µε έναν παραγοντισµό του θεµελιώδους πίνακα του συστήµατος σε έναν πραγµατικό ορθοκανονικό πίνακα Ε και έναν πραγµατικό άνω τριγωνικό πίνακα Τ, της µορφής t 0
26 26 (1.23) Αποδεικνύεται ότι ο «πρότυπος» αλγόριθµος συγκλίνει για σχεδόν κάθε αρχική συνθήκη στο στους εκθέτες Lyapunov ενός δυναµικού συστήµατος. Ο θεµελιώδης πίνακας Φ έχει την µορφή (1.24) (1.25) Αν περιορίσουµε τους Ε και Τ να είναι πραγµατικοί πίνακες, έχουµε την µέθοδο που περιγράφεται στην αρχή. Με τον D άνω τριγωνικό πίνακα, ο Τ επίσης γίνεται άνω τριγωνικός. Στην πραγµατικότητα, η εξίσωση είναι ένα επιλύσιµο γραµµικό σύστηµα, θεωρώντας ότι τα στοιχεία είναι γνωστές συναρτήσεις. Αν διαλέξουµε πραγµατικό, θα παραµείνει πραγµατικός για όλο τον χρόνο, και αφού το A(t) είναι πραγµατικό, το D(t) θα είναι πραγµατικό. Έτσι, θα είναι αδύνατο να υπολογίσουµε έναν εκθέτη Lyapunov µε φανταστικό µέρος. Η επιλογή µιγαδικού θα οδηγήσει σε µιγαδικούς D και Τ και διατηρεί την πιθανότητα ορισµού ενός φανταστικού µέρους του εκθέτη Lyapunov. Στην περίπτωση σταθερού A(t), ο θεµελιώδης πίνακας µπορεί να γραφτεί. Αντικαθιστούµε τον Α µε την τριγωνική του διάσπαση, όπου Ε είναι µοναδιαίος και U άνω τριγωνικός. Οι ιδιοτιµές του Α εµφανίζονται ως τα διαγώνια στοιχεία του U. Έτσι, έχουµε. Επιπλέον, αφού ο U είναι άνω τριγωνικός µε τις ιδιοτιµές του Α στην διαγώνιό του, απευθείας υπολογισµός από το εκθετικό του πίνακα δίνει τα διαγώνια στοιχεία του Τ ως. Έτσι, οι χαρακτηριστικοί εκθέτες του συστήµατος, πραγµατικά και φανταστικά µέρη, βρίσκονται ως. Σε ένα σύστηµα περιοδικού χρόνου, ο θεµελιώδης πίνακας διασπάται ως, όπου F(t) είναι ένας µη-ιδιάζων περιοδικός πίνακας, και J είναι η σταθερή µορφή Jordan της οποίας τα διαγώνια στοιχεία είναι οι εκθέτες Poincare. H F(t) µπορεί να διασπαστεί σαν γινόµενο ενός µοναδιαίου πίνακα E(t) και έναν άνω τριγωνικό U(t) F(t)=EU. Άρα, θα έχουµε (1.26) (1.27)
27 27 πραγµατικό και φανταστικό µέρος. Έχουµε την διαφορική εξίσωση για το δίνει (1.28) είναι οι χαρακτηριστικοί εκθέτες του συστήµατος, µε. Αυτό ολοκληρώνεται και Η παραπάνω µορφή λύσης ισχύει για όλα τα διαγώνια στοιχεία του Τ. Αφού ο Τ είναι άνω τριγωνικός πίνακας, ξέρουµε τις ιδιοτιµές του. Αυτές είναι τα διαγώνια στοιχεία του Τ. οι εκθέτες Lyapunov που περιλαµβάνουν ένα φανταστικό µέρος Αυτός ο ορισµός συµφωνεί µε την περίπτωση σταθερού συντελεστή, περιοδικού συντελεστή, και την πραγµατική περίπτωση του «πρότυπου» αλγόριθµου εκθετών Lyapunov. Αριθµητικά λάθη αναπόφευκτα θα αναγκάσουν το E(t) να αποχωρήσει ελαφρά από την τέλεια µοναδιαία συνθήκη. Έτσι, το πρόγραµµα αποθηκεύει ένα ποσό του Ε συµπεριλαµβανοµένων των διαγώνιων στοιχείων και των στοιχείων πάνω από την διαγώνιο. Σε κάθε βήµα, το τελευταίο διάνυσµα e N κανονικοποιείται για να εξαλειφθεί κάθε αριθµητικό λάθος. Ο τελευταίος συντελεστής που λείπει του επόµενου από το τελευταίο διάνυσµα e N-1 ανακατασκευάζεται από τις απαιτήσεις ότι: πρέπει να είναι ορθογώνιο στο e N και µοναδιαίο διάνυσµα. Αυτό σηµαίνει, e N e N-1 =0, e N-1 e N-1 =1 κοκ. Τα πραγµατικά µέρη υπολογίζονται σωστά για κάθε αρχικό, ενώ τα φανταστικά µέρη είναι µόνο σωστά αν το σωστό χρησιµοποιείται. Η συνεχής χρόνου εκδοχή της πρότυπης µεθόδου µπορεί να επεκταθεί και να συµπεριλάβει ένα φανταστικό µέρος. Επιπλέον, αυτή η επέκταση συµφωνεί και µε την περίπτωση του σταθερού συντελεστή και µε του περιοδικού όταν οι σωστές αρχικές συνθήκες χρησιµοποιούνται για τον µοναδιαίο πίνακα. Άρα, υπάρχει αναγκαιότητα σωστών αρχικών συνθηκών για το Ε. Αλλιώς, ο αλγόριθµος υπολογίζει τα πραγµατικά µέρη σωστά, αλλά τα φανταστικά µέρη είναι τυχαία. Η αριθµητική δουλειά επίσης επιβεβαιώνει ότι κάποια χρονικά εξαρτώµενα συστήµατα δείχνουν µη-µηδενικά φανταστικά µέρη.
28 Αλγόριθµος των Eckmann και Ruelle και πλαστοί εκθέτες Lyapunov Είναι δύσκολο να βρεθούν οι εκθέτες Lyapunov από πειραµατικά δεδοµένα. Συγκεκριµένα, όταν χρησιµοποιούµε την θεωρία εµβύθισης για να δηµιουργήσουµε χαοτικούς ελκυστές σε ένα χώρο ανακατασκευής, περισσότεροι εκθέτες Lyapunov µπορούν να εµφανιστούν που δεν είναι εκθέτες του αρχικού συστήµατος. Έτσι, όταν ένα σύστηµα 2 διαστάσεων µε εκθέτες Lyapunov λ και µ ανακατασκευάζεται σε ένα χώρο 5 διαστάσεων µε γενική εµβύθιση, το ανακατασκευασµένο σύστηµα έχει εκθέτες λ,µ,2λ,λ+µ και 2µ. Η επιτυχηµένη ανακατασκευή του ελκυστή του αρχικού συστήµατος είναι η βάση της µεθόδου για τον υπολογισµό των εκθετών Lyapunov και προτείνεται από τους Eckmann και Ruelle. Όµως, αφού ο ανακατασκευασµένος ελκυστής συχνά βρίσκεται σε ένα χώρο µεγαλύτερων διαστάσεων από το αρχικό σύστηµα, οι υπολογισµοί παράγουν πάρα πολλούς εκθέτες. Αυτό οδηγεί σε µια σηµαντική ερώτηση: Πώς διακρίνουµε τους αληθινούς εκθέτες Lyapunov του αρχικού συστήµατος από τους επιπλέον εκθέτες που παρουσιάζονται στο ανακατασκευασµένο σύστηµα; Ένα σύστηµα 2 διαστάσεων έχει 2 εκθέτες Lyapunov λ και µ. Μετά την ανακατασκευή, οι εκθέτες θα είναι λ, µ, 2λ, λ+µ και 2µ. Αν µ<0<λ, τότε οι υπολογισµένοι εκθέτες θα είναι 2µ< µ<λ+µ<λ<2λ και ο µεγαλύτερος εκθέτης θα είναι «πλαστός». Όταν σύστηµα µίας διάστασης µε εκθέτη Lyapunov λ ανακατασκευάζεται σε m-διάστατο χώρο, η διαδικασία Eckmann-Ruelle παράγει m εκθέτες λ,2λ,,mλ. Ο αλγόριθµος «Eckmann-Ruelle» έχει 3 σηµαντικά βήµατα για τον υπολογισµό των εκθετών Lyapunov: Ανακατασκευάζουµε τον ελκυστή σε κάποιο Ευκλείδειο χώρο µετρήσεων m διαστάσεων. Με τον ανακατασκευασµένο ελκυστή, υπάρχει µία απεικόνιση F που µεταφέρει το διάνυσµα P t m-διαστάσεων σε χρόνο t+τ. Αυτή η απεικόνιση F αντιπροσωπεύει την ανακατασκευασµένη δυναµική και το F(P t ) ορίζεται να είναι P t+τ. Υπολογίζουµε ένα πίνακα τοπικής γραµµικοποίησης για το F σε κάθε σηµείο P του ανακατασκευασµένου ελκυστή, βρίσκοντας τον mxm πίνακα Μ(που εξαρτάται από το P) και ικανοποιεί την σχέση P t+τ F(P) Μ(P t -Ρ) (1.29) Για κάθε t για το οποίο το P t είναι κοντά στο Ρ. Ονοµάζουµε αυτή την καλύτερη τοπική γραµµικοποίηση Μ=Μ(Ρ) στο Ρ την «Eckmann-Ruelle» γραµµικοποίηση στο Ρ. Η διαδικασία υπολογισµού του πίνακα τοπικής γραµµικοποίησης σε ένα σηµείο βάσης Ρ στο R 5 είναι γρήγορη και βασίζεται στη µέθοδο ελαχίστων τετραγώνων.
29 29 Υπολογίζουµε τους εκθέτες Lyapunov του F από ένα γινόµενο πινάκων αυτών των τοπικών γραµµικοποιήσεων. Γράφουµε M i =M(P t+iτ ) για τον καλύτερο πίνακα τοπικής γραµµικοποίησης στο σηµείο P t+iτ. Μετά, οι εκθέτες Lyapunov (συµπεριλαµβανόµενων και των «πλαστών») είναι οι τιµές από την σχέση 1 lim ln n n M n 1 M n 2... M1M 0 u (1.30) m για διανύσµατα u R. Αυτό το όριο µπορεί να υπολογιστεί χρησιµοποιώντας την διάσπαση πινάκων QR για να µετατρέψει το γινόµενο πινάκων Μ n-1 M 0 σε ένα γινόµενο άνω τριγωνικών πινάκων R n-1 R 0. Έτσι, βρίσκουµε ορθογώνιους πίνακες Q i και άνωτριγωνικούς R i (µε µη αρνητικά διαγώνια στοιχεία)τέτοιους ώστε Μ i Q i-1 = Q i R i (1.31) Τα διαγώνια στοιχεία των τελευταίων άνω τριγωνικών πινάκων είναι τα γινόµενα των αντίστοιχων διαγώνιων στοιχείων του R i. Μετά, µπορούµε να διαβάσουµε τους Eckmann-Ruelle-Lyapunov εκθέτες ακριβώς από τα διαγώνια στοιχεία R ii των n 1 1 λ = lim ln( R ) ενδιάµεσων πινάκων R i j n n i= 0 i jj (1.32) Αυτή η διαδικασία θα παράγει έναν εκθέτη για κάθε διάσταση του χώρου ανακατασκευής. Για να καταλάβουµε τα νούµερα που θα προκύψουν από τον αλγόριθµο, είναι σηµαντικό να ορίσουµε τις «Eckmann-Ruelle» γραµµικοποιήσεις. Οι τοπικές γραµµικοποιήσεις δεν µπορούν να είναι πίνακες παραγώγων αλλά έχουν µία σηµαντική ιδιότητα: Υπάρχουν φυσικά συστήµατα συντεταγµένων βάσει των οποίων οι πίνακες γραµµικοποίησης έχουν ένα ειδικό άνω-τριγωνικό πίνακα. Αυτή η άνω-τριγωνική µορφή µας επιτρέπει να υπολογίσουµε εύκολα τους εκθέτες Lyapunov. Στην πράξη, υλοποιούµε τον Eckmann-Ruelle αλγόριθµο υπολογίζοντας τους πίνακες τοπικής γραµµικοποίησης χρησιµοποιώντας τις ανακατασκευασµένες τροχιές του δυναµικού συστήµατος. Το P=π(p) είναι το σηµείο στον ανακατασκευασµένο χώρο φάσεων R m που αντιστοιχεί στο σηµείο p του αρχικού χώρου φάσεων. Αναπαριστούµε τη δυναµική ροή του αρχικού χώρου φάσεων από την απεικόνιση f του χρόνου τ για κάποιο τ. Η συνάρτηση µέτρησης π απεικονίζει τον αρχικό χώρο φάσεων στο R m για κάποιο m. Στο R m, υπάρχει µία απεικόνιση ροής F=πfπ -1 χρόνου τ που απεικονίζει κάθε π(p) στο π(f(p)), και αναφερόµαστε στο F ως ανακατασκευασµένη δυναµική. Ο αλγόριθµος που περιγράφεται παραπάνω είναι σθεναρός. Συγκεκριµένα, µπορεί να υπολογίσει όλους τους θετικούς εκθέτες Lyapunov αξιόπιστα, παρόλο που
30 30 η σωστή αναγνώριση των αρνητικών εκθετών Lyapunov παραµένει ένα δύσκολο θέµα. Σχήµα 1.9: Μία απλή συνάρτηση π από R 2 σε R 3 ανακατασκευάζει τον αληθινό ελκυστή (a) σαν ένα σύνολο στο R 3 (b) Οποιοσδήποτε πίνακας που δεν απεικονίζει τους πρώτους όρους της σειράς Taylor σωστά θα έχει σφάλµα Ο( Ρ ), αντί του σφάλµατος Ο( Ρ 3 ) της Eckmann- Ruelle γραµµικοποίησης. Ευτυχώς, αλγόριθµοι που υπολογίζουν τοπικές γραµµικοποιήσεις αντιθέτως θα βρουν πίνακες µε σφάλµα Ο( Ρ 2 ) ή καλύτερο, και αυτοί οι πίνακες θα απεικονίζουν τους πρώτους όρους Taylor σωστά. Αυτό βεβαιώνει ότι οι αληθινοί εκθέτες Lyapunov θα είναι ανάµεσα στους πρώτους από τους υπολογισθέντες εκθέτες.
31 Αλγόριθµος του Wolf Η γνωστή τεχνική της ανακατασκευής του χώρου φάσης µε συντεταγµένες καθυστέρησης κάνει δυνατό να αποκτηθεί από µία χρονοσειρά ένας ελκυστής του οποίου το φάσµα Lyapunov είναι ίδιο µε αυτό του αρχικού ελκυστή. Οι εκθέτες Lyapunov µπορούν να οριστούν από την εξέλιξη του χώρου φάσης της σφαίρας καταστάσεων. Προσπάθειες να εφαρµοστεί αυτός ο ορισµός αριθµητικά σε εξισώσεις κίνησης αποτυγχάνουν αφού οι υπολογιστικοί περιορισµοί δεν επιτρέπουν την αρχική σφαίρα να κατασκευάζεται αρκετά µικρή. Στην προσέγγιση ODE κάποιος αποφεύγει αυτό το πρόβληµα δουλεύοντας στον εφαπτοµενικό χώρο µίας συµβατικής τροχιάς έτσι ώστε να λαµβάνει πάντα απειροστά διανύσµατα κύριου άξονα. Οι εναποµένουσες αποκλίσεις εύκολα εξαλείφονται µε την ορθοκανονικοποίηση Gram-Schmidt. Η προσέγγιση ODE δεν είναι ευθέως εφαρµόσιµη σε πειραµατικά δεδοµένα όταν το γραµµικό σύστηµα δεν είναι διαθέσιµο. Θεωρούµε συστήµατα που κατέχουν τουλάχιστον ένα θετικό εκθέτη. Για να εκτιµήσουµε το λ 1, παρακολουθούµε την µακριά χρονική εξέλιξη ενός µοναδικού ζευγαριού κοντινών τροχιών. Ο ανακατασκευασµένος ελκυστής µας, παρόλο που ορίζεται από µία µόνο τροχιά, µπορεί να παρέχει σηµεία που µπορούν να θεωρηθούν ότι είναι σε διαφορετικές τροχιές. ιαλέγουµε σηµεία των οποίων ο χρονικός διαχωρισµός στην αρχική χρονοσειρά είναι τουλάχιστον µία µέση τροχιακή περίοδος, επειδή ένα ζεύγος σηµείων µε πολύ µικρότερο χρονικό διαχωρισµό χαρακτηρίζεται από ένα µηδενικό εκθέτη Lyapunov. ύο σηµεία δεδοµένων µπορούν να θεωρηθούν ότι ορίζουν την πρώιµη κατάσταση του πρώτου κύριου άξονα όσο η χωρική τους απόσταση είναι µικρή. Όταν η απόστασή τους γίνεται µεγάλη θα θέλαµε να εκτελέσουµε το GSR στο διάνυσµα που ορίζουν. Η χρήση ενός πεπερασµένου ποσού πειραµατικών δεδοµένων δεν µας επιτρέπει να ερευνήσουµε τις επιθυµητές απειροστές κλίµακες µήκους ενός ελκυστή. Αυτές οι κλίµακες είναι επίσης απρόσιτες εξαιτίας της παρουσίας του θορύβου σε κλίµακες πεπερασµένου µήκους και µερικές φορές επειδή η παραχθείσα από το χάος δοµή του ελκυστή είναι αµελητέες χωρικής έκτασης. Η προσέγγισή µας µπορεί να επεκταθεί σε τόσους µη αρνητικούς εκθέτες όσους θέλουµε να εκτιµήσουµε: k+1 σηµεία στον ανακατασκευασµένο ελκυστή ορίζουν ένα k όγκου στοιχείο του οποίου η µακριά χρονική εξέλιξη είναι πιθανή µέσω µιας διαδικασίας αντικατάστασης δεδοµένων που προσπαθεί να διατηρήσει τον προσανατολισµό του χώρου φάσης και να ερευνήσει µόνο την δοµή της µικρής κλίµακας του ελκυστή. Ο ρυθµός αύξησης ενός k όγκου στοιχείου παρέχει µία εκτίµηση του αθροίσµατος των πρώτων k εκθετών Lyapunov. Εκτελούµε διάφορες εκδοχές των αλγορίθµων που περιλαµβάνουν τα εξής: απλά προγράµµατα εξέλιξης σταθερού χρόνου για λ 1 και λ 1 +λ 2 προγράµµατα εξέλιξης µεταβλητού χρόνου για λ 1 +λ 2 και διαδραστικά προγράµµατα που χρησιµοποιούνται σε µία γραφική µηχανή.
32 Πρόγραµµα εξέλιξης σταθερού χρόνου για λ 1 εδοµένου της χρονοσειράς x(t), ένα m-διάστατο πορτρέτο φάσης ανακατασκευάζεται µε συντεταγµένες χρονικής υστέρησης, π.χ ένα σηµείο στον ελκυστή δίνεται από {x(t),x(t+τ),,x(t+[m-1]τ) όπου το τ είναι ο σχεδόν αυθαίρετα επιλεγµένος χρόνος υστέρησης. Τοποθετούµε τον πιο κοντινό γείτονα στο αρχικό σηµείο {x(t 0 ),,x(t 0 +[m-1]τ) και ονοµάζουµε την απόσταση µεταξύ αυτών των δύο σηµείων L(t 0 ). Σε αργότερο χρόνο t 1, το αρχικό µήκος θα εξελιχθεί σε µήκος L'(t 1 ). Αν ο χρόνος εξέλιξης είναι πολύ µεγάλος µπορεί να δούµε το L' να µικραίνει αφού οι δύο τροχιές που το ορίζουν περνούν µέσα από µία αναδιπλούµενη περιοχή του ελκυστή. Τώρα ψάχνουµε για ένα νέο σηµείο δεδοµένων που ικανοποιεί δύο κριτήρια: η απόσταση του L(t 1 ) από το εξελισσόµενο συµβατό σηµείο είναι µικρή, και η γωνιακή απόσταση ανάµεσα στα εξελισσόµενα στοιχεία και σε αυτά που αντικαθιστούν είναι µικρή(βλέπε σχήµα 1 10a). Σχήµα 1.10: Μία σχηµατική αναπαράσταση της διαδικασίας εξέλιξης και αντικατάστασης που χρησιµοποιείται για προσέγγιση των εκθετών Lyapunov από πειραµατικά δεδοµένα. a) Ο µέγιστος εκθέτης Lyapunov υπολογίζεται από την αύξηση των στοιχείων µήκους. Όταν το µήκος του
33 33 διανύσµατος µεταξύ δύο σηµείων γίνεται µεγάλο, ένα νέο σηµείο δίνεται κοντά στην τροχιά αναφοράς, ελαχιστοποιώντας και το µήκος αντικατάστασης L και την αλλαγή προσανατολισµού θ. b) µία παρόµοια διαδικασία ακολουθείται για να υπολογίσει το άθροισµα των δύο µεγαλύτερων εκθετών Lyapunov από την αύξηση των εµβαδών. Όταν τα εµβαδά γίνονται πολύ µεγάλα, δύο νέα σηµεία διαλέγονται κοντά στην τροχιά αναφοράς. Αυτή η διαδικασία επαναλαµβάνεται µέχρι η συµβατή τροχιά να διασχίσει όλο το αρχείο δεδοµένων, στο σηµείο του οποίου εκτιµούµε (1.33) όπου Μ είναι ο συνολικός αριθµός των βηµάτων αντικατάστασης. Το χρονικό βήµα = µεταξύ των αντικαταστάσεων παραµένει σταθερό Πρόγραµµα εξέλιξης µεταβλητού χρόνου για λ 1 +λ 2 Ο αλγόριθµος για την εκτίµηση λ 1 +λ 2 είναι παρόµοιος µε τον προηγούµενο, αλλά είναι πιο πολύπλοκος στην εκτέλεση. Τρία σηµεία δεδοµένων επιλέγονται, αποτελούµενα από το αρχικό συµβατό σηµείο και τα κοντινότερα γειτονικά του. Η περιοχή Α(t 0 ) ορισµένη από αυτά τα σηµεία παρακολουθείται µέχρι ένα βήµα αντικατάστασης να είναι και επιθυµητό και πιθανό- ο χρόνος εξέλιξης είναι µεταβαλλόµενος. Αυτό θέτει υπό εντολή την χρήση διάφορων επιπρόσθετων παραµέτρων εισόδου: ενός ελάχιστου αριθµού βηµάτων εξέλιξης µεταξύ των αντικαταστάσεων, του αριθµού των βηµάτων για να εξελιχθεί προς τα πίσω όταν η θέση αντικατάστασης αποδειχθεί ανεπαρκής, και ενός µέγιστου µήκους ή περιοχής πριν την αντικατάσταση. Η εξέλιξη συνεχίζει µέχρι ένα πρόβληµα να συµβεί. Στην εκτέλεση µας, η λίστα προβληµάτων περιλαµβάνει: ένα διάνυσµα κύριου άξονα να µεγαλώνει τόσο πολύ ή τόσο γρήγορα ή µία περιοχή να αυξάνει τόσο γρήγορα. Όποτε κάποιο από αυτά τα κριτήρια ικανοποιούνται, η τριπλέτα σηµείων εξελίσσεται προς τα πίσω κάποια βήµατα και µία αντικατάσταση επιχειρείται. Αν η αντικατάσταση αποτύχει, θα τραβήξουµε την τριπλέτα πίσω άλλα τόσα βήµατα, και θα προσπαθήσουµε ξανά. Σε αυτό το σηµείο, παίρνουµε το καλύτερο διαθέσιµο σηµείο αντικατάστασης, και πηδάµε µπροστά τουλάχιστον κάποια βήµατα για να αρχίσει η νέα εξέλιξη. Στον πρώτο χρόνο αντικατάστασης t 1, τα δύο σηµεία, όχι στην συµβατή τροχιά, αντικαθιστώνται µε δύο νέα σηµεία για να πάρουµε µικρότερη περιοχή Α(t 1 ) της οποίας ο προσανατολισµός στον χώρο φάσης είναι ως επί το πλείστον ο ίδιος µε αυτόν της εξελισσόµενης περιοχής Α'(t 1 )(βλέπε σχήµα 1.10 b). Καθορίζοντας το σύνολο των σηµείων αντικατάστασης που διατηρεί καλύτερα τον προσανατολισµό περιοχής, δεν παρουσιάζονται θεµελιώδεις δυσκολίες. (1.34)
34 Κριτήρια επιλογής αλγόριθµου Wolf Ακριβής υπολογισµός των εκθετών Lyapunov απαιτεί την θεώρηση των παρακάτω σηµείων: η επιθυµία µεγιστοποίησης του χρόνου εξέλιξης η ελαχιστοποίηση του µεγέθους του διανύσµατος αντικατάστασης και του λάθους προσανατολισµού και ο τρόπος µε τον οποίο τα λάθη προσανατολισµού συσσωρεύονται. Η µεγιστοποίηση του χρόνου εξέλιξης είναι επιθυµητή, αφού µειώνει την συχνότητα µε την οποία δηµιουργούνται τα λάθη προσανατολισµού και το κόστος του υπολογισµού. Στο πρόγραµµα µεταβλητού χρόνου εξέλιξης αυτό δεν είναι πρόβληµα, αφού οι αντικαταστάσεις εκτελούνται µόνο όταν είναι απαραίτητο. Στον interactive αλγόριθµο είναι ακόµα λιγότερο πρόβληµα, αφού ένας έµπειρος χειριστής µπορεί συχνά να επεξεργάζεται ένα µεγάλο αρχείο µε ένα πολύ µικρό αριθµό αντικαταστάσεων. Το πρόβληµα είναι σοβαρό, όµως, στο πρόγραµµα σταθερού χρόνου εξέλιξης, που παρόλα αυτά είναι επιθυµητό για την απλότητά του. Σε αυτό το πρόγραµµα, αντικαταστάσεις επιχειρούνται σε σταθερά χρονικά βήµατα, ανεξάρτητα της συµπεριφοράς του στοιχείου όγκου. Πολύ συχνές αντικαταστάσεις προκαλούν µία δραµατική έλλειψη του προσανατολισµού χώρου φάσης, και πολύ µη συχνές αντικαταστάσεις επιτρέπουν στα στοιχεία όγκου να µεγαλώνουν πάρα πολύ και να παρουσιάζουν αναδίπλωση. Σε συστήµατα όπου ο µηχανισµός για το χάος είναι άγνωστος, κάποιος πρέπει να ελέγξει για ευστάθεια εκθέτη για µεγάλο εύρος χρόνων εξέλιξης. Για τέτοια συστήµατα είναι ίσως συνετό να εφαρµοστεί µόνο το πρόγραµµα µεταβλητού χρόνου εξέλιξης ή το interactive πρόγραµµα Householder QR Αλγόριθµος Όπως, έχουµε αναφέρει οι διακριτές µέθοδοι QR (µιλάµε µόνο για τις διακριτές, γιατί είναι πιο αποτελεσµατικές υπολογιστικά από τις συνεχείς) κάνουν τις παραγοντοποιήσεις των πινάκων χρησιµοποιώντας την διαδικασία ορθογωνοποίησης Gram-Schmidt (GS) (και την µεταλλαγµένη GS (MGS)), την επανορθογωνοποίηση GS (RGS) και κάποια από τις υπόλοιπες µεθόδους ορθογωνοποίησης QR, από τις οποίες αυτή που χρησιµοποιεί τον µετασχηµατισµό Householder (HQR) είναι η πιο αποτελεσµατική. Η GS µέθοδος είναι γνωστή ως αριθµητικά ασταθής αφού ο πίνακας Q µπορεί σοβαρά να αποκλίνει από την ορθογωνιότητα εξαιτίας των σφαλµάτων στρογγυλοποίησης. Παρόλα αυτά δεν υπάρχουν αναφορές για ανεπαρκή ορθότητα στους εκθέτες Lyapunov όταν χρησιµοποιείται η GS µέθοδος. Σηµαντικά βελτιωµένη αριθµητική ευστάθεια επιτυγχάνεται χρησιµοποιώντας τη MGS. Επίσης, τα
35 35 υπολογιστικά κόστη των MGS και GS είναι τα ίδια και αυτό κάνει τις MGS µεθόδους ακόµα πιο ελκυστικές. Η επανορθογωνοποίηση (µερικές φορές χρησιµοποιείται ακόµα και σε συνεργασία µε τις MGS, για κακώς ορισµένα προβλήµατα) ουσιαστικά διπλασιάζει το κόστος µίας παραγοντοποίησης. Σε αντίθεση µε την GS, η HQR µέθοδος είναι ευσταθής προς τα πίσω, αφού χρησιµοποιεί µοναδιαίους µετασχηµατισµούς που διατηρούν την L 2 -νόρµα. Η Householder QR παραγοντοποίηση παρά την απευθείας εφαρµογή της (ασυµπτωτικά, για µεγάλα n) είναι υπολογιστικά πιο ακριβή από την GS (ή τις MGS ). Έτσι, µε αλλαγές στην πρότυπη Householder QR παραγοντοποίηση, παίρνουµε µία µέθοδο όχι µόνο υπολογιστικά πιο αποτελεσµατική από τις GS και MGS προσεγγίσεις, αλλά φαινοµενικά επίσης πιο ευσταθή Αλγόριθµος του Rosenstein Αυτός ο αλγόριθµος ακολουθεί ακριβώς τον ορισµό του µέγιστου εκθέτη Lyapunov και είναι ακριβής επειδή εκµεταλλεύεται όλα τα απαραίτητα δεδοµένα. Είναι γρήγορος αλγόριθµος, εύκολος στην υλοποίηση, και σθεναρός σε αλλαγές στις ακόλουθες ποσότητες: διάσταση εµβύθισης, µέγεθος των δεδοµένων, καθυστέρηση ανακατασκευής και επίπεδο θορύβου. Επιπλέον, κάποιος µπορεί να χρησιµοποιήσει τον αλγόριθµο για να υπολογίσει ταυτόχρονα την διάσταση συσχέτισης. Επίσης, µία ακολουθία από υπολογισµούς θα επιφέρει µία εκτίµηση και του επιπέδου του χάους και της πολυπλοκότητας του συστήµατος. Όπως έχουµε αναφέρει για τις χρονοσειρές που παράγονται από δυναµικά συστήµατα, η παρουσία ενός θετικού χαρακτηριστικού εκθέτη Lyapunov υποδεικνύει χάος. Επιπλέον, σε πολλές εφαρµογές είναι επαρκές να υπολογίζεται µόνο ο µέγιστος εκθέτης Lyapunov(λ 1 ). Όµως, οι υπάρχουσες µέθοδοι για την εκτίµηση του λ 1 υποφέρουν τουλάχιστον από ένα από τα ακόλουθα µειονεκτήµατα: αναξιόπιστες για µικρά σύνολα δεδοµένων υπολογιστικά έντονες σχετικά δύσκολες για να υλοποιηθούν. Για αυτόν τον λόγο, υπάρχει αυτή η µέθοδος για τον υπολογισµό του µέγιστου εκθέτη Lyapunov. Η µέθοδος είναι αξιόπιστη για µικρά σύνολα δεδοµένων, γρήγορη, και εύκολη στην υλοποίηση. Το πρώτο βήµα της προσέγγισης περιλαµβάνει την ανακατασκευή της δυναµικής του ελκυστή από µία µόνο χρονοσειρά. Χρησιµοποιούµε την µέθοδο των χρονικών υστερήσεων αφού ένας στόχος της µεθόδου είναι να είναι γρήγορη και εύκολα υλοποιήσιµη. Aφού ανακατασκευαστεί η δυναµική του συστήµατος, ο αλγόριθµος εντοπίζει τον κοντινότερο γείτονα κάθε σηµείου της τροχιάς. Ο κοντινότερος γείτονας, βρίσκεται ψάχνοντας για το σηµείο που ελαχιστοποιεί την απόσταση από το συγκεκριµένο σηµείο αναφοράς. Αυτό εκφράζεται ως
36 36 (1.35) όπου το είναι η αρχική απόσταση του j-στού σηµείου από τον κοντινότερο γείτονα του, και υποδηλώνει την Ευκλείδεια νόρµα. Επιβάλλουµε τον πρόσθετο περιορισµό ότι οι κοντινότεροι γείτονες έχουν ένα χρονικό χωρισµό µεγαλύτερο από την µέση περίοδο της χρονοσειράς:. (1.36) Αυτό µας επιτρέπει να θεωρήσουµε κάθε ζευγάρι γειτόνων σαν κοντινές αρχικές συνθήκες για διαφορετικές τροχιές. Ο µέγιστος εκθέτης Lyapunov έτσι εκτιµάται ως ο µέσος ρυθµός χωρισµού των κοντινών γειτόνων. Σε αυτό το σηµείο, η προσέγγισή µας για τον υπολογισµό του λ 1 είναι παρόµοια µε τις προηγούµενες µεθόδους που εντοπίζουν την εκθετική απόκλιση κοντινών γειτόνων. Όµως, είναι σηµαντικό να επισηµάνουµε κάποιες διαφορές: ο αλγόριθµος του Wolf et al. αποτυγχάνει να εκµεταλλευτεί όλα τα διαθέσιµα δεδοµένα, επειδή συγκεντρώνεται σε µία «συµβατική» τροχιά. Ένας µοναδικός κοντινότερος γείτονας ακολουθείται και επανειληµµένα αντικαθίσταται όταν η διαφορά του από την τροχιά αναφοράς ξεπερνά ένα συγκεκριµένο όριο. Επιπρόσθετος υπολογισµός επίσης απαιτείται επειδή η µέθοδος προσεγγίζει την διαδικασία Gram-Schmidt αντικαθιστώντας έναν γείτονα µε ένα που διατηρεί τον προσανατολισµό του στον χώρο φάσης. αν ο κοντινότερος γείτονας προηγείται(προσωρινά) από το σηµείο αναφοράς του, τότε ο αλγόριθµος µπορεί να θεωρηθεί σαν µία προσέγγιση «πρόβλεψης». Όµως, άλλες µέθοδοι πρόβλεψης χρησιµοποιούν πιο λεπτοµερείς τρόπους, που απαιτούν πολύ περισσότερο υπολογισµό. η συγκεκριµένη προσέγγιση βασίζεται στην εργασία του Sato et al. που εκτιµά τον λ 1 ως (1.38) όπου είναι η περίοδος δειγµατοληψίας της χρονοσειράς, και είναι η απόσταση µεταξύ του j-στού ζευγαριού των κοντινότερων γειτόνων µετά από I βήµατα διακριτού χρόνου σε δευτερόλεπτα. Επίσης, το Μ είναι ο αριθµός των ανακατασκευασµένων σηµείων. Για να πετύχει σύγκλιση, οι Sato et al. δίνουν µία εναλλακτική µορφή: (1.39) H διαδικασία συνεχίζει ως εξής:
37 37 Σχήµα 1.11: ιάγραµµα ροής του πρακτικού αλγόριθµου για τον υπολογισµό του µέγιστου εκθέτη Lyapunov Συνεχής/ ιακριτή διάσπαση QR Όπως παρατηρήσαµε, µία τεχνική για τον υπολογισµό των εκθετών Lyapunov περιλαµβάνει την εκτέλεση µίας συνεχούς QR διάσπασης ενός θεµελιώδους πίνακα λύσης(3.3.1). Η άλλη είναι µία διακριτή µέθοδος QR, που χρησιµοποιεί έναν αλγόριθµο Gram-Schmidt για να υπολογιστούν οι QR διασπάσεις(3.3.2). Η συνεχής QR µέθοδος είναι συχνά πολύ καλύτερη µέθοδος από την διακριτή. Για την συνεχή µέθοδο QR εκτελούµε 2 βήµατα: υπολογίζουµε τον παράγοντα Q ολοκληρώνοντας το σύστηµα πινάκων και προσεγγίζουµε τον εκθέτη Lyapunov χρησιµοποιώντας την
38 38 (1.40) υσκολίες παρουσιάζονται για αρνητικούς εκθέτες Lyapunov µεγάλου εύρους, ακόµα και αν ο προσεγγιστικός θεµελιώδης πίνακας λύσης είναι ακριβής. Αυτό εξηγεί κάποιες παρατηρήσεις στην βιβλιογραφία σχετικά µε την δυσκολία του υπολογισµού των αρνητικών εκθετών Lyapunov µε την διακριτή µέθοδο QR. Στην συνεχή µέθοδο QR, δεν υπάρχει ένδειξη χειροτέρευσης για τους αρνητικούς εκθέτες που συµβαίνει στην διακριτή. Επιπλέον πλεονέκτηµα της συνεχούς είναι ότι δεν χρειαζόµαστε να ολοκληρώσουµε το αρχικό σύστηµα. Η εκτέλεση της διακριτής QR περιλαµβάνει τα εξής: ολοκληρώνουµε την εξίσωση πινάκων Φ & = Α( tφ ), Φ( t0) = I χρησιµοποιώντας R-K 2 ης τάξης ή την κλασική R-K 4 ης τάξης. Η διάσπαση QR γίνεται µε την µέθοδο Gram-Schmidt και για απλούστευση, αυτή η διάσπαση εκτελείται για κάθε βήµα ολοκλήρωσης. Χρησιµοποιούµε την διαδικασία Gram-Schmidt επειδή ο παράγοντας R πρέπει να κρατηθεί «οµαλός», κάνοντας ελάχιστη την µεταβολή στα R ii, και η πρότυπη εκτέλεση του βήµατος Householder δεν είναι κατάλληλη. Η διακριτή QR έχει φριχτή ακρίβεια για τον αρνητικό εκθέτη Lyapunov. Σηµειώστε τον µεγάλο CPU χρόνο και το µεγάλο λάθος όταν ένας µεταβλητός ολοκληρωτής χρησιµοποιείται µε την διακριτή QR. 2.4 Πολυπλοκότητα µέσω προβλεπτικότητας σε τυχαία δυναµικά συστήµατα Εισάγουµε ένα χαρακτηρισµό της «πολυπλοκότητας» τυχαίων δυναµικών συστηµάτων και συγκεκριµένα ένα κατάλληλο δείκτη πολυπλοκότητας ως συνάρτηση του µέσου αριθµού των bits ανά µονάδα χρόνου απαραίτητου για να καθορίσουµε την ακολουθία που παράγουν τα συστήµατα. Για δυναµικά συστήµατα µε τυχαίες διαταραχές, αυτό συµπίπτει µε τον ρυθµό Κ της απόκλισης κοντινών τροχιών υπό διαφορετικό θόρυβο. Επίσης, αυτός ο δείκτης πολυπλοκότητας µπορεί να εξαχθεί από πραγµατικά πειραµατικά δεδοµένα. Η τιµή του Κ είναι πολύ διαφορετική από τον εκθέτη Lyapunov, αλλά µπορεί να οριστεί µέσω αυτού. Η παρουσία µικρού θορύβου δεν αλλάζει την ποιοτική συµπεριφορά της δυναµικής του συστήµατος. Στην περίπτωση ενός κανονικού(ευσταθούς) συστήµατος, η τυχαία διαταραχή απλώς αλλάζει την µακροπρόθεσµη συµπεριφορά εισάγοντας την πιθανότητα αλµάτων µεταξύ διαφορετικών ελκυστών(ευσταθή σταθερά σηµεία, ευσταθείς οριακοί κύκλοι). Ακόµα και στα χαοτικά απωλεστικά συστήµατα, η παρουσία θορύβου αναµένεται να µην αλλάζει την ποιοτική συµπεριφορά µε δραµατικό τρόπο. Παρόλα αυτά η τιµή του εκθέτη Lyapunov διαφέρει από αυτόν χωρίς διαταραχή κατά µια ποσότητα Ο(σ), όπου σ: η δύναµη του θορύβου. Ένα από τα κύρια προβλήµατα του θορύβου στα δυναµικά συστήµατα είναι η έλλειψη µιας καλής ορισµένης µεθόδου για να χαρακτηρίσουµε την πολυπλοκότητα
39 39 των τροχιών. Παρόλο που ο συντελεστής Lyapunov λ σ είναι µία καλά ορισµένη ποσότητα, δεν είναι ούτε ο µοναδικός ούτε ο πιο χρήσιµος χαρακτηρισµός της πολυπλοκότητας. Συνήθως ο βαθµός της χαοτικότητας µετριέται µε το να θεωρούµε τον τυχαίο όρο σαν όρο που εξαρτάται από τον χρόνο(η πιο απλή προσέγγιση) και άρα θεωρώντας τον χωρισµό των δύο κοντινών τροχιών µε την ίδια πραγµατοποίηση θορύβου(αυτός ο χαρακτηρισµός µπορεί να είναι παραπλανητικός). Με αυτόν τον τρόπο είναι δυνατό να υπολογίσουµε τον µέγιστο εκθέτη Lyapunov λ σ συνδεδεµένο µε τον ρυθµό απόκλισης δύο αρχικά κοντινών τροχιών µε τον ίδιο στοχαστικό όρο η(t), που είναι Όπου το διάνυσµα της εφαπτοµένης είναι 1 λ σ = lim ln z( t) (1.41) t t dz dt 2 V ( x( t)) = z( t) 2 (1.42) x Ένας απλός υπολογισµός δείχνει ότι λ σ < 0, που υποδηλώνει µια διαδικασία πλήρως προβλέψιµη µόνο αν ο θόρυβος είναι γνωστός. Επιπρόσθετα, µια στιγµή σκέψης δείχνει ότι είναι πρακτικά αδύνατο να εξάγουµε το λ σ από πειραµατικά δεδοµένα. Ας θεωρήσουµε το µοντέλο x(t +1) = f[x(t),t] +σw(t), όπου w(t) είναι µια ασυσχέτιστη τυχαία διαδικασία. Ο µέγιστος εκθέτης Lyapunov λ σ δίνεται από την απεικόνιση του διανύσµατος της εφαπτοµένης από την (1). Για σ = 0, το λ 0 είναι ο εκθέτης Lyapunov της µη-διαταραγµένης απεικόνισης. Ένας αποτελεσµατικός εκθέτης Lyapunov λ σ έχει εισαχθεί για την µέτρηση της διακύµανσης της χαοτικότητας 1 γ t ( τ ) = ln τ z( t + τ ) z( t) (1.43) Αυτό δίνει τον τοπικό ρυθµό επέκτασης στο διάστηµα [t,t+τ]. Ο µέγιστος εκθέτης Lyapunov δίνεται από ένα χρονικό µέσο κατά µήκος της τροχιάς x(t): λ 0 = <γ t > για τ. Έστω ότι έχουµε τροχιά x(t) που ξεκινάει από το x(0) και x (t) είναι η τροχιά που ξεκινά από x (0) = x(0) + δx(0). Έστω ότι δ 0 = δx(0) και ας θεωρήσουµε ότι τ 1 είναι ο ελάχιστος χρόνος t i που ικανοποιεί την σχέση x (t i ) x(t i ). Μετά θέτουµε x (τ 1 +1)=x(τ 1 +1) + δx(0) και ορίζουµε τ 2 ως τον ελάχιστο χρόνο t 2 έτσι ώστε να ισχύει x (τ 1 +t 2 ) - x(τ 1 +t 2 ) >, κοκ. Έτσι ορίζουµε τον εκθέτη Lyapunov σαν
40 40 Έτσι προκύπτει ο ρυθµός γ ι Κ σ 1 = ln τ δ i 0 (1.44) 1 = ln( τ (1.45) 1 όπου Ν τ = lim τ ι που συµπίπτει µε το λ Ν 0 για ένα ντετερµινιστικό σύστηµα (σ = 0). N ι= 1 Όταν το σ είναι µηδέν, δεν υπάρχει λόγος να καθορίσουµε τον εκθέτη Lyapunov. Η πολυπλοκότητα ενός συστήµατος θορύβου µπορεί να εκτιµηθεί από την σχέση G σ δ 0 σ = min Κ σ = λ0 + Ο( ) τ ) (1.46) Πρέπει να σηµειωθεί ότι στην περίπτωση του ντετερµινιστικού συστήµατος το Κ 0 δεν εξαρτάται από την τιµή τ. Αντιθέτως στα συστήµατα µε θόρυβο υπάρχει ένας βέλτιστος χρόνος που ελαχιστοποιεί το Κ σ και είναι ίσος µε 1/λ σ. υπογραµµίζουµε από ορισµό ότι G σ 0, όταν λ σ <0. Η ενδιαφέρουσα περίπτωση συµβαίνει όταν υπάρχουν εναλλαγές θετικών και αρνητικών γ κατά την διάρκεια ενός µεγάλου χρονικού διαστήµατος όταν θέλουµε να µεταδώσουµε µια ακολουθία x(t). Σε αυτήν την περίπτωση η ύπαρξη ενός βέλτιστου χρόνου για την µετάδοση προκαλεί µια δραµατική αλλαγή στην τιµή του G σ. Κατά την διάρκεια των διαστηµάτων µε θετικό εκθέτη Lyapunov η µετάδοση πρέπει να επαναλαµβάνεται αρκετά συχνά, ενώ κατά την διάρκεια διαστηµάτων µε αρνητικό εκθέτη Lyapunov καµιά πληροφορία δεν στέλνεται. Αυτό υποδηλώνει ότι µε µεγάλο T i µόνο τα επεκταµένα διαστήµατα συνεισφέρουν στην εξέλιξη του σφάλµατος δx(t) και η εντροπία της πληροφορίας δίνεται από τον µέσο όρο τον θετικών εκθετών Lyapunov. Ας τονιστεί ότι ο υπολογισµός του Κ σ είναι αρκετά απλός και σχεδόν ίδιος µε τον συνηθισµένο αλγόριθµο για τον υπολογισµό του πρώτου εκθέτη Lyapunov. Βασικά το Κ σ συνδέεται µε την ε- εντροπία όπως συνδέεται ο πρώτος εκθέτης Lyapunov µε την εντροπία Kolmogorov-Sinai. Επίσης, από αριθµητική προσοµοίωση 2 διαφορετικών συστηµάτων, µπορούµε να δούµε ότι ενώ το λ περνά από αρνητικές σε θετικές τιµές καθώς το σ µειώνεται, το G σ δεν είναι ευαίσθητο σε αυτή τη µετάβαση. Άλλη µία σηµαντική παρατήρηση είναι ότι, αν υπάρχει κάποιος θόρυβος, το λ σ µπορεί να είναι τελείως διαφορετικό από το G σ.
41 41 Σχήµα 1.12: Εξέλιξη των λ σ, Κ σ συναρτήσει του σ Τα αποτελέσµατα δείχνουν ότι το ίδιο σύστηµα µπορεί να θεωρηθεί κανονικό(λ σ <0) όταν η ίδια πραγµατοποίηση θορύβου θεωρείται για 2 κοντινές τροχιές ή χαοτικό(g σ >0) όταν θεωρούνται 2 διαφορετικές πραγµατοποιήσεις θορύβου. Στα τυχαία δυναµικά συστήµατα, γενικά, το τυχαίο κοµµάτι αντιπροσωπεύει ένα σύνολο κρυµµένων µεταβλητών, που είναι άγνωστες παρατηρήσιµες και πιστεύεται ότι εµπλέκονται στην δυναµική. Το τυχαίο κοµµάτι µπορεί επίσης να µιµείται το αποτέλεσµα ενός συνόλου µεταβλητών που µεταβάλλονται µε χαοτικό τρόπο ή που µεταβάλλονται µε µικρό χρόνο σε σχέση µε το χρόνο του φαινοµένου που είναι υπό έρευνα. Ο εκθέτης Lyapunov λ Ι παρέχει την απλούστερη πληροφορία για την χαοτικότητα και µπορεί να υπολογιστεί θεωρώντας την διαχώριση 2 κοντινών τροχιών που χαράσσονται στην ίδια πραγµατοποίηση της τυχαίας διαδικασίας Ι(t)=i 1,i 2,,i t. Είναι δυνατόν να εισάγουµε τον εκθέτη Lyapunov για τυχαίες απεικονίσεις θεωρώντας την εξέλιξη του διανύσµατος της εφαπτοµένης
42 42 z n+1 = df i n dx x n z n (1.47) Έτσι ώστε για όλες σχεδόν τις αρχικές συνθήκες, να ισχύει λ Ι = lim N 1 N ln z N (1.48) Αξίζει να σηµειωθεί για άλλη µία φορά ότι αυτός ο χαρακτηρισµός της χαοτικότητας ενός τυχαίου δυναµικού συστήµατος µπορεί να είναι παραπλανητική. Μία αρνητική τιµή του εκθέτη Lyapunov υπολογισµένη µε αυτόν τον τρόπο υποδηλώνει προβλεπτικότητα µόνο αν η πραγµατοποίηση της τυχαιότητας είναι άγνωστη. Για τροχιές αρχικά πολύ κοντά αλλά εξελισσόµενες υπό διαφορετική πραγµατοποίηση τυχαιότητας, µπορεί να συµβεί µετά από κάποιο χρόνο οι 2 τροχιές να είναι πολύ µακριά ακόµα και µε αρνητικό λ Ι. Σηµειώσαµε πόσο παραπλανητικός µπορεί να είναι ο χαρακτηρισµός της χαοτικότητας ενός τυχαίου δυναµικού συστήµατος από τον εκθέτη Lyapunov. Από την άλλη πλευρά, όπως και στην περίπτωση του προσθετικού θορύβου, είναι δυνατόν να εισάγουµε ένα µέτρο πολυπλοκότητας Κ. Η ποσότητα που εξηγεί καλύτερα τις χαοτικές τους ιδιότητες είναι: Κ h s + λ Ι θ(λ Ι ) (1.49) όπου h s είναι η εντροπία του Shannon µιας τυχαίας ακολουθίας Ι(t), λ Ι ο εκθέτης Lyapunov και θ η βηµατική συνάρτηση. Η σηµασία της πολυπλοκότητας είναι µάλλον σαφής: Κ/log2 είναι ο µέσος αριθµός των bits, για κάθε επανάληψη, απαραίτητος για να καθορίσει την ακολουθία x 1,x 2,,x t µε κάποια ανοχή. Το µεγάλο πλεονέκτηµα είναι ότι το Κ µπορεί να εξαχθεί από πειραµατικά δεδοµένα. Συµπερασµατικά, ένας αρνητικός εκθέτης Lyapunov δεν υποδηλώνει την πιθανότητα να προβλέπει την µελλοντική κατάσταση του συστήµατος εκτός αν κάποιος γνωρίζει τον θόρυβο. Οι δύο δείκτες Κ και λ σ έχουν κοντινές τροχιές και είναι πρακτικά ισοδύναµοι σε µία ασθενή διαλειπτότητα(intermittency: ανώµαλη εναλλαγή µεγάλων κανονικών περιόδων µε ξαφνικές χαοτικές ριπές). Όµως, υπό παρουσία δυνατής διαλειπτότητας, τα Κ και λ σ γίνονται πολύ διαφορετικά, και σε ακραίες περιπτώσεις µπορεί το Κ>0, ενώ το λ σ < Προβλήµατα στον υπολογισµό των εκθετών Lyapunov Υπάρχουν κάποια προβλήµατα στις προσεγγίσεις των εκθετών Lyapunov. Οι δύο κύριες πηγές σφάλµατος είναι: το λάθος από την περικοπή του προβλήµατος απείρου χρόνου σε πεπερασµένο και
43 43 τα σφάλµατα διακριτοποίησης από την αριθµητική ολοκλήρωση των διαφορικών εξισώσεων. Για δεδοµένο χρόνο Τ<, οι εκθέτες Lyapunov περικοµµένου χρόνου είναι ακριβώς οι τιµές που παίρνουµε περικόπτοντας τα άπειρα όρια στην τιµή Τ. Για κανονικά συστήµατα, αυτό µειώνεται σε όπου και είναι τα διαγώνια στοιχεία του άνω τριγωνικού θεµελιώδους πίνακα λύσης του Φ & = Α( t ) Φ, Φ( t0) = I. Υπάρχουν τουλάχιστον 2 βασικές δυσκολίες στην προσέγγιση εκθετών Lyapunov. Η πρώτη είναι εσωτερική: οι εκθέτες Lyapunov υπάρχουν σαν όρια, και αν ναι, πώς κάποιος βρίσκει έναν κατάλληλο πεπερασµένο χρόνο για να περικόψει την διαδικασία; Η δεύτερη δυσκολία είναι αριθµητική. Κάποιος πρέπει επίσης να ξέρει ότι η διαταραχή εξαιτίας της αριθµητικής µεθόδου µπορεί κυρίως να παράγει µηκανονικά συστήµατα, και µετά δεν υπάρχει πλέον καµία εγγύηση ότι οι τεχνικές QR δίνουν ακριβείς προσεγγίσεις στους εκθέτες. Η διακριτή QR εκτελείται καλά για θετικούς εκθέτες Lyapunov αλλά έχει δυσκολίες για αρνητικούς(µεγάλους) εκθέτες Lyapunov. Η συνεχής QR φαίνεται σθεναρή όταν εκτελείται χρησιµοποιώντας µοναδιαίους ολοκληρωτές, που εγγυώνται ορθογωνιότητα της προσέγγισης του Q(t). 2.6 Θόρυβος και η αντιµετώπιση του Τα αποτελέσµατα του θορύβου διαιρούνται σε δύο κατηγορίες: 1)την στατιστική και 2)την καταστροφική. Καταστροφές µπορούν να συµβούν ακόµα και µε απουσία θορύβου είτε από πολύ χαµηλή διάσταση εµβύθισης, ή από πολύ λίγα δεδοµένα που συνοδεύονται µε µεγάλη πολυπλοκότητα του ελκυστή. Στην παρουσία θορύβου, καταστροφές συµβαίνουν επειδή ο θόρυβος οδηγεί ένα µακρινό σηµείο δεδοµένων στην αρένα αντικατάστασης. Ο θόρυβος σε φυσικά συστήµατα µπορεί να χωριστεί σε δύο κατηγορίες: 1)τον θόρυβο µέτρησης και 2)τον δυναµικό θόρυβο(διακυµάνσεις στην κατάσταση του συστήµατος ή στις παραµέτρους του). Στην 1 η περίπτωση, είναι σαφές ότι το σύστηµα κατέχει καλά-ορισµένους εκθέτες που είναι πιθανόν ανακτήσιµοι. Όµως, στην 2 η περίπτωση, οι εκθέτες Lyapunov δεν είναι καλά-ορισµένοι. Μία προσέγγιση για την µείωση των αποτελεσµάτων του θορύβου περιλαµβάνει φίλτρο χαµηλών συχνοτήτων των δεδοµένων πριν αρχίσει η εκτίµηση του εκθέτη. Το φιλτράρισµα ενδέχεται να παραµορφώσει τα σχήµατα, να εξαλείψει την δοµή, και να διαταράξει την φάση, αλλά δεν περιµένουµε να χαθεί η αποκλίνουσα φύση του ελκυστή.
πειραµατικά δεδοµένα χωρίς φίλτρο, b)τα ίδια δεδοµένα, µε φίλτρο χαµηλών συχνοτήτων,c)τα δεδοµένα φιλτράρονται σε µικρότερη συχνότητα Το φιλτράρισµα αλλάζει δραµατικά το σχήµα του")
44 44 Σχήµα 1.13: a)πειραµατικά δεδοµένα χωρίς φίλτρο, b)τα ίδια δεδοµένα, µε φίλτρο χαµηλών συχνοτήτων,c)τα δεδοµένα φιλτράρονται σε µικρότερη συχνότητα Το φιλτράρισµα αλλάζει δραµατικά το σχήµα του ανακατασκευασµένου ελκυστή, αλλά οι εκτιµώµενες τιµές του λ 1 διαφέρουν κατά λίγο τοις εκατό από την αφιλτράριστη τιµή, ανάλογα µε τις συχνότητες αποκοπής. Βέβαια, το φίλτρο χαµηλών συχνοτήτων αποτυγχάνει να βοηθήσει στην εκτίµηση του εκθέτη αν υπάρχει ουσιώδης µόλυνση των δεδοµένων σε συχνότητες χαµηλότερες από το κατώφλι του φίλτρου. Σε µία απλή µελέτη πολυπεριοδικών δεδοµένων µε προστιθέµενο λευκό θόρυβο, ο εκτιµώµενος εκθέτης επιστρέφει( πολύ κοντά) στο 0 για ένα επαρκές ποσό φιλτραρίσµατος. Έτσι φαίνεται ότι σε κάποιες περιπτώσεις ο εξωτερικός θόρυβος µπορεί να διαχωριστεί από το χάος µε αυτή την διαδικασία. 2.7 Απαιτήσεις δεδοµένων για τον υπολογισµό των εκθετών Lyapunov Το ποσό των δεδοµένων που απαιτούνται για τον υπολογισµό των εκθετών Lyapunov εξαρτάται από τρεις διαφορετικούς παράγοντες: 1)τον αριθµό των απαραίτητων σηµείων για να παρέχουν έναν επαρκή αριθµό σηµείων αντικατάστασης, 2)τον αριθµό των τροχιών των απαραίτητων δεδοµένων για την έρευνα του τεντώµατος(αλλά όχι και της αναδίπλωσης) µέσα στον ελκυστή, και 3)τον αριθµό των δεδοµένων σηµείων ανά τροχιά που επιτρέπει κατάλληλη ανακατασκευή ελκυστή µε συντεταγµένες χρονικής υστέρησης. Πρώτα εκτιµάµε πόσα σηµεία απαιτούνται για να γεµίσουν την δοµή ενός ελκυστή και να παρέχουν σηµεία αντικατάστασης. Μία απλή εκτίµηση αυτού του παράγοντα εξαρτάται από τα ακόλουθα στοιχεία: 1)την κλασµατική διάσταση του ελκυστή, 2)τον αριθµό των µη αρνητικών εκθετών στο σύστηµα, 3)τον αριθµό των εκθετών που επιχειρούµε να υπολογίσουµε και 4)τις γεωµετρικές απαιτήσεις για αποδεκτά σηµεία αντικατάστασης. Ένας περισσότερο ακριβής υπολογισµός αυτού του αριθµού εξαρτάται από τέτοια λεπτοµερή πληροφορία όπως την κλασµατική δοµή
45 45 του ελκυστή και την πυκνότητα πιθανότητας του, που δεν είναι τυπικά διαθέσιµα για πειραµατικά δεδοµένα, και το επίπεδο του αποτελεσµατικού θορύβου στο σύστηµα. Ο επόµενος παράγοντας που θεωρούµε είναι ο αριθµός των τροχιών των απαιτούµενων δεδοµένων. Γενικά, για ένα σύστηµα ορισµένο από µία n-d απεικόνιση, ο αριθµός των τροχιών των απαιτούµενων δεδοµένων για την εκτίµηση κάθε µη-αρνητικού εκθέτη δίνεται από µία σταθερά,c, υψωµένη σε µία δύναµη που είναι ο αριθµός των θετικών εκθετών. Ο αριθµός αυτός είναι σχεδόν η διάσταση του ελκυστή-1, αφού ο απαιτούµενος αριθµός τροχιών είναι σχεδόν C d-1. Το τελευταίο και πιο απλό θέµα είναι ο απαιτούµενος αριθµός σηµείων ανά τροχιά, Ρ. εν υπάρχει πλεονέκτηµα να επιλέξουµε το Ρ µεγαλύτερο από ό,τι είναι απαραίτητο. Θα µπορούσαµε να προσπαθήσουµε να διαλέξουµε το Ρ τόσο µικρό που σε εξέλιξη ενός µόνο βήµατος, το µέσο διάνυσµα αντικατάστασης θα µεγάλωνε τόσο πολύ όσο επιτρέπαµε. Το πρόβληµα είναι ότι µε δεδοµένα τόσο διασκορπισµένα είναι απίθανο να αποκτήσουµε µία καλή ανακατασκευή του ελκυστή µας. Συχνά η σχέση mτ 1 χρησιµοποιείται σε ανακατασκευές, όπου το m είναι η διάσταση εµβύθισης και τη καθυστέρηση σε µονάδες τροχιακών περιόδων. Θεωρούµε ότι η ανακατασκευή εκτελείται σε ένα σχεδόν d-διάστατο χώρο, και η καθυστέρηση ανταποκρίνεται σε ένα µόνο χρόνο δείγµατος, έτσι ώστε. Το ποσό των δεδοµένων που απαιτούνται για να εκτιµήσουν µη-αρνητικούς εκθέτες µεγαλώνει εκθετικά γρήγορα µε την διάσταση του ελκυστή. Σχήµα 1.14: Η χρονική σύγκλιση του λ 1 σαν συνάρτηση του αριθµού των δεδοµένων. Ο ρυθµός δειγµατοληψίας παραµένει σταθερός. Παρατηρούµε ότι µεγαλώνοντας την χρονοσειρά όχι µόνο αυξάνει ο χρόνος σύγκλισης αλλά δηµιουργούνται και περισσότερα σηµεία αντικατάστασης.
46 Καθολικοί και τοπικοί εκθέτες Lyapunov και η σηµασία τους Όπως ορίσαµε παραπάνω, οι πρότυποι εκθέτες Lyapunov αφορούν ρυθµούς µακροπρόθεσµης αύξησης, κυρίως διαστολής και συστολής µίας απειροστής διαταραχής σε άπειρο χρόνο. Για αυτόν τον λόγο, ονοµάζουµε αυτούς καθολικούς εκθέτες Lyapunov. Εξαιτίας του µεγάλου χρονικού ορίου, αυτοί οι καθολικοί εκθέτες Lyapunov είναι ανεξάρτητοι της συγκεκριµένης τροχιάς στον ελκυστή του συστήµατος και είναι αµετάβλητοι. Οι τοπικοί εκθέτες Lyapunov καθορίζουν πώς µία διαταραχή σε µία τροχιά του συστήµατος θα µεγαλώσει σε πεπερασµένο χρόνο. Αυτοί οι τοπικοί εκθέτες Lyapunov εξαρτώνται από την θέση στο χώρο φάσης του συστήµατος ή στο χώρο κατάστασης όπου η διαταραχή συµβαίνει. Αυτή η τελευταία ιδιότητα κάνει τους τοπικούς εκθέτες την πρακτική ποσότητα που ελέγχει το όριο στην προβλεπτικότητα που συνδέεται µε την έµφυτη δυναµική αστάθεια σε ένα χαοτικό σύστηµα. Στην πραγµατικότητα, κάποιος µπορεί να προβλέψει µόνο για πεπερασµένο χρόνο σε ένα χαοτικό σύστηµα, επειδή έχει γνώση της θέσης χώρου φάσης µόνο σε µία πεπερασµένη λύση. Αυτή η αβεβαιότητα στο χώρο φάσης µεγεθύνεται ή µειώνεται εκθετικά γρήγορα όσο ο χρόνος εξελίσσεται. Έτσι, οι τοπικοί εκθέτες πεπερασµένου χρόνου είναι κρίσιµες ποσότητες που κυβερνούν την προβλεπτικότητα. Αν η αστάθεια για ένα δεδοµένο σηµείο στο χώρο φάσης είναι συγκριτικά µεγάλη, αυτό σηµαίνει ότι υπάρχει ένας µεγάλος θετικός τοπικός εκθέτης Lyapunov, και µετά η ικανότητα κάποιου να προβλέψει σε αυτήν την περιοχή του χώρου φάσης περιορίζεται. Αντίθετα, όταν ο µεγαλύτερος τοπικός εκθέτης Lyapunov είναι µικρός, η προβλεπτικότητα βελτιώνεται σηµαντικά. Ο µεγαλύτερος τοπικός εκθέτης Lyapunov µπορεί να είναι αρνητικός, υπαινίσσοντας ευστάθεια µικρού χρόνου, ακόµα και αν ο µεγαλύτερος καθολικός εκθέτης Lyapunov είναι θετικός, υπαινίσσοντας χάος. Οι τοπικοί εκθέτες Lyapunov µπορούν να ποικίλλουν αρκετά σηµαντικά πάνω σε έναν ελκυστή. Η σηµασία των τοπικών εκθετών Lyapunov βασίζεται στα παρακάτω: 1)όταν µελετάµε ένα δεδοµένο δυναµικό σύστηµα, που αντιµετωπίζεται στην ανάλυση ως φυσική, βιολογική, µηχανική ή οικονοµική εφαρµογή, για παράδειγµα, κάποιος µπορεί να θέλει να εγκαταστήσει περιοχές του χώρου κατάστασης του συστήµατος, όπου µπορεί να προβλέψει L βήµατα µπροστά από αυτήν την περιοχή µε κάποια βεβαιότητα. Αυτή η πληροφορία περιέχεται στο λ i (x,l) µε το x στην περιοχή ενδιαφέροντος. Μία έρευνα των µέσων τοπικών εκθετών Lyapunov λ i (L) και των RMS( root mean square) αλλαγών για αυτήν την ποσότητα δίνει µία απευθείας και εύκολα υπολογίσιµη γνώση στην ύπαρξη των περιοχών µε τον µεγαλύτερο λ i (x,l) που µπορεί να είναι µικρός ή ακόµα και αρνητικός. 2)σε κάθε περίπτωση, οι τοπικοί εκθέτες υπηρετούν σαν µία λεπτοµερή έρευνα της προβλεπτικότητας µίας πολύπλοκης εξόδου σε ένα σύστηµα. 3)οι καθολικοί εκθέτες Lyapunov είναι, φυσικά, χρήσιµοι σαν σύγκριση
47 47 µεταξύ πειραµατικής και θεωρητικής ανάλυσης, αλλά αναπαριστούν µόνο ένα σηµείο (ή d σηµεία στο R d ), ενώ οι τοπικοί εκθέτες Lyapunov παρουσιάζουν την πιθανότητα για πιο λεπτοµερείς συγκρίσεις αφού τα µοντέλα και οι παρατηρήσεις απαιτείται να συµφωνούν σε ένα µεγάλο αριθµό τιµών. Αυτό το επιπλέον στοιχείο στην επαλήθευση του µοντέλου µπορεί να αποδειχθεί κρίσιµο όταν αντιµετωπίζουµε πολύπλοκα µοντέλα για πολύπλοκα φυσικά και βιολογικά φαινόµενα. 4)τελικά, όταν παρουσιάζεται ένα σύνολο κλιµακωτών µετρήσεων, ξέρουµε από ποικίλες µεθόδους πώς να φτιάξουµε µία ανακατασκευή χώρου φάσης σε d E διαστάσεις. Αυτή η διάσταση εµβύθισης µπορεί να είναι µεγαλύτερη από την διάσταση του συστήµατος, που την ονοµάζουµε τοπική διάσταση d L. Οι τοπικοί εκθέτες Lyapunov µπορούν να βοηθήσουν στον καθορισµό της δυναµικής διάστασης d L µε τον ακόλουθο τρόπο: στην διάσταση d E υπολογίζουµε τους d E τοπικούς εκθέτες Lyapunov λ i (L) για τα δεδοµένα που διαβάζονται µπροστά στον χρόνο και µετά για τα δεδοµένα πίσω στον χρόνο. Το τελευταίο θα αλλάξει το πρόσηµο αν είναι αληθινός εκθέτης. Μετά κάνουµε το ίδιο για τοπικά µοντέλα διάστασης d E -1, µετρώντας αποστάσεις στον χώρο εµβύθισης d E και υπολογίζοντας τους d E -1 τοπικούς εκθέτες Lyapunov. Όταν όλοι οι εκθέτες, προς τα εµπρός και προς τα πίσω, συµφωνούν για κάθε L, τότε αυτή η διάσταση δεν έχει άλλους ψευδείς εκθέτες Lyapunov λόγω της διαδικασίας εµβύθισης, και έτσι κάποιος φτάνει στην δυναµική διάσταση d L. Οι τοπικοί εκθέτες Lyapunov λ i (x,l) εξαρτώνται από το σηµείο του ελκυστή όπου αρχίζει η διαταραχή. Αυτό σε αντίθεση µε τους καθολικούς εκθέτες, που είναι ανεξάρτητοι του x. Επιπλέον, οι καθολικοί εκθέτες δεν αλλάζουν όταν κάνουµε µία οµαλή αλλαγή συντεταγµένων στο χώρο φάσης. Οι τοπικοί εκθέτες δεν αλλάζουν, αλλά αποκτούν ένα επιπλέον κοµµάτι που είναι µόνο της τάξης. 2.9 Μορφοκλασµατικά σχέδια Lyapunov (Lyapunov Fractals) Στα µαθηµατικά, τα µορφοκλασµατικά σχέδια Lyapunov(επίσης γνωστά ως Markus-Lyapunov fractals) είναι µορφοκλασµατικά σχέδια διακλάδωσης προερχόµενα από µία επέκταση της λογιστικής απεικόνισης(βλέπε παράγραφο 2.1.3) στην οποία ο βαθµός αύξησης του πληθυσµού,r, περιοδικά αλλάζει µεταξύ δύο τιµών Α και Β. Ένα µορφοκλασµατικό σχέδιο Lyapunov κατασκευάζεται απεικονίζοντας τις περιοχές ευστάθειας και χαοτικής συµπεριφοράς( µετρούµενης από τον εκθέτη Lyapunov λ) στον χώρο α-b από µία δεδοµένη περιοδική ακολουθία από α και b. Παρακάτω, εµφανίζονται τρεις µορφοκλασµατικά σχέδια Lyapunov που δηµιουργήθηκαν στο Matlab(βλέπε παράρτηµα) για τρεις διαφορετικές ακολουθίες. Στις εικόνες, το γαλάζιο απεικονίζει το λ<0(ευστάθεια), και το µπλε το λ>0(χάος).


48 48 Σχήµα 1.15: Μορφοκλασµατικό σχέδιο Lyapunov για την ακολουθία Σχήµα 1.16: Μορφοκλασµατικό σχέδιο Lyapunov για την ακολουθία
 ιαλέγουµε ένα string από Α και Β οποιουδήποτε µήκους(π.")
49 49 Σχήµα 1.17: Μορφοκλασµατικό σχέδιο Lyapunov για την ακολουθία ' ' Ο αλγόριθµος, για τον υπολογισµό των fractals περιληπτικά είναι ως εξής: 1) ιαλέγουµε ένα string από Α και Β οποιουδήποτε µήκους(π.χ ΑΑΒΑΒ). 2) Κατασκευάζουµε την ακολουθία S σχηµατισµένη από διαδοχικούς όρους στο string, επαναλαµβανόµενων όσες φορές είναι απαραίτητο. 3) ιαλέγουµε ένα σηµείο (α,b) [0,4] [0,4]. 4) Ορίζουµε την συνάρτηση αν, και αν. 5) Θεωρούµε x 0 =0.5, και υπολογίζουµε τις επαναλήψεις. 6) Υπολογίζουµε τον εκθέτη Lyapunov: (1.50) Στην πράξη, το λ προσεγγίζεται διαλέγοντας ένα κατάλληλα µεγάλο 7) Χρωµατίζουµε το σηµείο (α,b) σύµφωνα µε την τιµή του λ που υπολογίζεται. 8) Επαναλαµβάνουµε τα βήµατα (3-7) για κάθε σηµείο στον χώρο της εικόνας.
50 50 ΚΕΦΑΛΑΙΟ 3 ΕΦΑΡΜΟΓΕΣ ΤΩΝ ΕΚΘΕΤΩΝ LYAPUNOV 3.1 Εισαγωγή Οι εκθέτες Lyapunov, όπως και οι µορφοκλασµατικοί (fractal) ελκυστές µας πρόσφεραν νέους και πιο αποτελεσµατικούς τρόπους ανάλυσης και βελτίωσης πρόβλεψης δεδοµένων υπό τη µορφή χρονοσειρών και υπεισέρχονται σε διάφορες επιστήµες, όπως τα Μαθηµατικά, τη Φυσική, τη Χηµεία, τη Βιολογία και την Επιστήµη Υπολογιστών, ενώ διακρίνονται ήδη οι επιρροές τους στο χώρο της Οικονοµίας και των Κοινωνικών Επιστηµών. Έτσι, από τη δυναµική πληθυσµών µέχρι την ανάπτυξη µικρο οργανισµών, από τις ταχύτατα εξελισσόµενες διαδικασίες χηµικών αντιδράσεων µέχρι τον σχηµατισµό γαλαξιών και από τις µεταβολές του καιρού και τις ταλαντώσεις σεισµογράφων και ηλεκτροκαρδιο-(και εγκεφαλο-) γραφηµάτων µέχρι τις διακυµάνσεις του Χρηµατιστηρίου, εκτείνεται µια τεράστια ποικιλία πολύπλοκων φαινοµένων όπου η θεωρία των εκθετών Lyapunov εφαρµόζεται. 3.2 Εφαρµογή στην Ιατρική Ηλεκτροκαρδιογράφηµα Η ανάλυση του ηλεκτροκαρδιογραφήµατος (ΗΚΓ) µε τις µεθόδους ανάλυσης χαοτικών χρονοσειρών υπήρξε την περασµένη δεκαετία ιδιαίτερα δηµοφιλής. Πιο συγκεκριµένα η ανάλυση της µεταβλητότητας της καρδιακής συχνότητας αποτέλεσε ένα ισχυρό εργαλείο στην κατανόηση και µελέτη της καρδιακής λειτουργίας, καθώς επίσης και στον καθορισµό του κατά πόσο αυτή η λειτουργία είναι υγιής. Από την εποχή των πρωτοπόρων Coldberger το 1987 και Babloyantz το 1988 αντίστοιχα, πλήθος ερευνητών έχει καταπιαστεί µε αυτό το θέµα, και πολλοί έχουν φθάσει σε αξιοποιήσιµα συµπεράσµατα. Οι µέθοδοι ανάλυσης χαοτικών χρονοσειρών λοιπόν, σε ότι αφορά την εφαρµογή τους σε καρδιογραφήµατα, µέχρι σήµερα έχουν βρει θερµούς υποστηρικτές οι οποίοι ισχυρίζονται ότι οι µέθοδοι θα µπορούσαν, υπό συνθήκες, να έχουν ικανοποιητική κλινική εφαρµογή. Υπάρχουν όµως και ερευνητές που βλέπουν την εφαρµογή των µεθόδων αυτών µε κριτικό µάτι θεωρώντας τις τρωτές κι ευαίσθητες αµφισβητώντας έτσι την ικανότητα αξιοποίησης τους στην κλινική πράξη. Αρχικά, δηµιουργήθηκαν χρονοσειρές από τα δεδοµένα της καρδιακής συχνότητας από υγιείς και ασθενείς. Το επόµενο βήµα ήταν να εξεταστεί αν οι χρονοσειρές του καρδιακού ρυθµού ήταν αποτέλεσµα στοχαστικής διαδικασίας ή ήταν
51 51 αποτέλεσµα κάποιας µη γραµµικής διαδικασίας αιτιοκρατικής, η οποία ενδεχοµένως θα µπορούσε να εµπεριέχει και κάποιες στοχαστικές συνιστώσες. Προκειµένου να γίνει αυτό, αναγκαίο ήταν να γίνει µη γραµµική ανάλυση των χρονοσειρών. Η µη γραµµική ανάλυση περιελάµβανε κυρίως στην ανακατασκευή του φασικού χώρου µε τη µέθοδο των χρονικών καθυστερήσεων και τον υπολογισµό των τοπολογικών αναλλοίωτων, όπως η διάσταση συσχέτισης, οι εκθέτες Lyapunov, και ο υπολογισµός εντροπιών. Βέβαια, το ζήτηµα της ύπαρξης του θορύβου είναι ένα ανοικτό ακόµη θέµα και επηρεάζει αρνητικά την αξιοπιστία των τιµών των µεθόδων. Οι ακριβείς τιµές των µη γραµµικών µεθόδων δεν µπορούν να δώσουν περαιτέρω πληροφορίες ένεκα της φτωχής στατιστικής η οποία προκύπτει από το πεπερασµένο µήκος των χρονοσειρών. Ο διαχωρισµός όµως που προσφέρει η µέθοδος είναι σηµαντικός διότι δεν είναι διακριτός µε τις µέχρι τώρα γνωστές γραµµικές µεθόδους ούτε και µε την οπτική επισκόπηση των ΗΚΓ. Βέβαια αυτός ο διαχωρισµός πρέπει να τεκµηριώνεται µε περισσότερες από µια µεθόδους ώστε να υπάρχει συνάφεια των αποτελεσµάτων. Οι µέθοδοι των κοντινότερων ψευδών γειτόνων έδειξαν συναφή αποτελέσµατα. Άλλες µη γραµµικές παράµετροι είναι οι εκθέτες Lyapunov και το φάσµα των εκθετών τους. εν έδειξαν όµως οι µέθοδοι αυτές αξιοποιήσιµα αποτελέσµατα πέραν της θεωρητικής ικανοποίησης της απαίτησης για εύρεση θετικού µεγίστου εκθέτη Lyapunov. Έτσι, από τις χρονοσειρές υπολογίστηκε ο µέγιστος εκθέτης Lyapunov µέσω ενός τροποποιηµένου αλγόριθµου των Wolf et al. και επίσης σχεδιάστηκαν τα φάσµατα των εκθετών Lyapunov και για τους υγιείς και τους ασθενείς. Σχήµα 1.18:Μέγιστος εκθέτης Lyapunov για RR-HRV χρονοσειρές
52 52 Σχήµα 1.19: Φάσµα εκθετών Lyapunov για RR-HRV χρονοσειρά προερχοµένη από ΗΚΓ υγιούς. Σχήµα 1.20: Φάσµα εκθετών Lyapunov για RR-HRV χρονοσειρά προερχοµένη από ΗΚΓ ασθενούς.
53 53 Από τα φάσµατα των εκθετών Lyapunov δεν βγαίνει κάποιο συµπέρασµα ούτε όµως από τον υπολογισµό του µέγιστου εκθέτη. Απλώς αυτός είναι θετικός και η ύπαρξη τουλάχιστον ενός θετικού εκθέτη Lyapunov, υποδηλώνει την χαοτικότητα των χρονοσειρών Ηλεκτροεγκεφαλογράφηµα για την πρόβλεψη επιληπτικής κρίσης Η µελέτη των Babloyantz et al. που δηµοσιεύτηκε το 1987 είναι µία από τις πρώτες µελέτες που ανέλυσαν τη µη γραµµική δυναµική του ηλεκτροεγκεφαλογραφήµατος (ΗΕΓ). Στην εργασία αυτή από χρονοσειρά προερχόµενη από επιφανειακό ΗΕΓ επιληπτικών κατασκευάστηκε χαοτικός ελκυστής και υπολογίστηκε η διάσταση αυτοσυσχέτισης D 2 που βρέθηκε αισθητά µικρότερη σε σχέση µε µη επιληπτικά ΗΕΓ. Το εύρηµα αυτό οδήγησε στο συµπέρασµα πως οι εγκεφαλικές διαδικασίες που τελούνται λίγο πριν την κρίση, αλλά και κατά τη διάρκειά της σχετίζονται µε χαµηλότερό βαθµό πολυπλοκότητας σε σχέση µε τη φυσιολογική κατάσταση. Επίσης, υπολογίστηκε θετική η τιµή του µεγαλύτερου εκθέτη Lyapunov, λ max, γεγονός που οδήγησε στο συµπέρασµα πως το υπό εξέταση σήµα είναι χαοτικό. Σε µελέτη των Iasemedis et al. του 1990 παρουσιάστηκαν επίσης ενθαρρυντικά ευρήµατα. Υπολογίστηκε ο µεγαλύτερος εκθέτης Lyapunov για 16 τµήµατα ΗΕΓ ένα για κάθε ηλεκτρόδιο που χρησιµοποιήθηκε στη µελέτη και βρέθηκε σε κάθε περίπτωση θετικός. Για τα ηλεκτρόδια κοντά στην επιληπτική εστία η τιµή του λ max µειωνόταν όταν ξεκινούσε η επιληπτική κρίση. Οι τιµές του εκθέτη για τα υπόλοιπα ηλεκτρόδια ακολουθούσαν. Το πιο σηµαντικό όµως εύρηµα της µελέτης ήταν πως οι χωροχρονικές µεταβολές µεγέθους που βασίζεται στον λ max παρατηρήθηκαν αρκετά λεπτά πριν την έναρξη των επιληπτικών κρίσεων. Σε έρευνα των Martinerie et al. που δηµοσιεύτηκε το 1998 αναλύθηκαν 19 τµήµατα ΗΕΓ που περιλάµβαναν περίοδο 20 λεπτών πριν την έναρξη της επιληπτικής κρίσης. Στις 17 από τις 19 περιπτώσεις ανιχνευτήκαν σηµαντικές µεταβολές στο µέγεθος της πυκνότητας αυτοσυσχέτισης, 2 έως 6 λεπτά πριν την έναρξη της κρίσης. Οι αποκλίσεις αυτές θεωρήθηκαν σαφείς ενδείξεις αλλαγής της δυναµικής των νευρωνικών συστηµάτων λίγο πριν την κρίση. Οι εκθέτες Lyapunov ενός µέρους από ΗΕΓ σήµατα (a) ΗΕΓ σήµατα καταγεγραµµένα από υγιείς εθελοντές µε ανοιχτά µάτια, (b) ΗΕΓ σήµατα καταγεγραµµµένα από επιληπτικούς ασθενείς σε φυσιολογική κατάσταση και (c) ΗΕΓ σήµατα καταγεγραµµένα από επιληπτικούς ασθενείς κατά την διάρκεια επιληπτικών κρίσεων) δίνονται από τις παρακάτω γραφικές. Μπορεί να σηµειωθεί ότι οι εκθέτες Lyapunov των τριών τήπων ΗΕΓ σηµάτων είναι διαφορετικοί, και εποµένως µπορούν να χρησιµοποιηθούν στον διαχωρισµό των ΗΕΓ σηµάτων. Από την γραφική (a) µπορούµε να δούµε ότι όλοι οι εκθέτες Lyapunov είναι θετικοί, που επιβεβεαιώνει την χαοτική φύση των ΗΕΓ σηµάτων καταγεγραµµένων από υγιείς ασθενείς µε ανοιχτά
54 54 µάτια. Όπως φαίνεται από τις γραφικές (b) και (c) υπάρχουν θετικοί εκθέτες Lyapunov, οι οποίοι επιβεβαιώνουν την χαοτική συµπεριφορά των ΗΕΓ σηµάτων καταγεγραµµένων από τους επιληπτικούς ασθενείς κατά τη διάρκεια ή µη επιληπτικής κρίσης. Σχήµα 1.21: (a)εκθέτες Lyapunov από ΗΕΓ σήµατα καταγεγραµµένα από υγιείς εθελοντές µε ανοιχτά µάτια, (b)εκθέτες Lyapunov από ΗΕΓ σήµατα καταγεγραµµένα από επιληπτικούς ασθενείς σε φυσιολογική κατάσταση, (c)εκθέτες Lyapunov από ΗΕΓ σήµατα καταγεγραµµένα από επιληπτικούς ασθενείς κατά την διάρκεια επιληπτικών κρίσεων Επίσης, έχει προταθεί µέσω της στατικής Μηχανικής ως µοντέλο για την ταλάντωση των εγκεφαλικών νευρώνων πριν και µετά από µία επιληπτική κρίση να χρησιµοποιηθούν συστήµατα ταλαντωτών(σχήµα (a)), όπου η αλλαγή µιας παραµέτρου σύζευξης, όπως το ε, οδηγεί σε περιοχές όπου η συµπεριφορά του µέγιστου εκθέτη Lyapunov STL max είναι ανάλογη µε εκείνη των νευρώνων(σχήµα (b), (c))
σύστηµα ταλαντωτών, (b)µέγιστος εκθέτης Lyapunov πριν, κατά την διάρκεια και µετά επιληπτικής κρίσης")
55 Σχήµα 1.22: (a)σύστηµα ταλαντωτών, (b)µέγιστος εκθέτης Lyapunov πριν, κατά την διάρκεια και µετά επιληπτικής κρίσης συναρτήσει χρόνου, (c)µέγιστος εκθέτης Lyapunov ταλαντωτικών συστηµάτων συναρτήσει της παραµέτρου σύζευξης ε 55
56 Εφαρµογή στη Βιολογία Στον κλάδο της βιολογίας, είναι πολύ σηµαντικός ο υπολογισµός των εκθετών Lyapunov για τα διάφορα βιολογικά συστήµατα, έτσι ώστε να κοθοριστεί η ύπαρξη χαοτικότητας. Έτσι, στην βιολογία υπάρχει η έννοια του πληθυσµού που υποδηλώνει το σύνολο των ατόµων ενός είδους που διαβιούν σε ένα χώρο για ορισµένο χρονικό διάστηµα και της δυναµικής πληθυσµών που είναι ο κλάδος της οικολογίας που µελετά τις µεταβολές των πληθυσµών στο χρόνο. Στην δυναµική πληθυσµών προσοµοιώνεται η εξέλιξη των πληθυσµών µε µαθηµατικά µοντέλα που σκοπό έχουν να µιµηθούν την συµπεριφορά των βιολογικών συστηµάτων. Υπάρχουν δύο είδη µαθηµατικών µοντέλων για την περιγραφή ενός βιολογικού συστήµατος: Συστήµατα διαφορικών εξισώσεων όταν οι µεταβολές είναι συνεχείς. Συστήµατα εξισώσεων διαφορών όταν το φαινόµενο µεταβάλλεται συνεχώς. Εποµένως, για παράδειγµα, ένα πληθυσµιακό µοντέλο είναι αυτό του θηρευτή-θηράµατος. Σε αυτό το µοντέλο, εκτός από τον έµµεσο ανταγωνισµό(ταυτόχρονη διεκδίκηση κοινών αποθεµάτων τροφής) υπάρχει και ο άµεσος ανταγωνισµός. Αυτό συµβαίνει όταν το ένα είδος αποτελεί τροφή για το άλλο. Έτσι, η εξισώση του πληθυσµού του θηράµατος και του θηρευτή είναι αντίστοιχα: (1.51) (1.52) Αυτές οι εξισώσεις είναι γνωστές σαν Lotka-Volterra και οι τιµές των παραµέτρων εκφράζουν την ικανότητα του είδους για επιβίωση και τον τρόπο αλληλεξάρτησης του από το περιβάλλον. ίνοντας κάποιες τιµές στις παραµέτρους, το σύστηµα γίνεται: Η µόνη πλέον παράµετρος είναι το µ, το οποίο ανάλογα αν είναι θετικό ή αρνητικό κάνει το είδος z θηρευτή του x ή ανταγωνιστή του (διεκδίκηση κοινών αποθεµάτων τροφής).

57 57 Αρχικά, υπολογίζονται τα σηµεία ισορροπίας, οι ιδιοτιµές και οι διακλαδώσεις του συστήµατος. Έπειτα, ερευνάται η χαοτική του συµπεριφορά, ανάλογα µε τις τιµές του µ. Εποµένως, για κάποιες τιµές του µ οι τροχιές είναι περιοδικές και για άλλες χαοτικές. Οι χαοτικές τιµές υποδηλώνουν κάποιο λάθος γιατί έτσι οι πληθυσµοί απειρίζονται και συµπεραίνεται ότι δεν υπάρχουν φυσικοί περιορισµοί. Για παράδειγµα, χρησιµοποιώντας το Matds έχουµε: Σχήµα 1.23: Παράθυρο ελέγχου για το toolbox Matds στο Matlab Παρακάτω ακολουθούν η δισδιάστατη απεικόνιση και η τρισδιάστατη απεικόνιση του συστήµατος όπως επίσης, και η γραφική απεικόνιση των εκθετών Lyapunov, όπου αποδεικνύεται η χαοτικότητα του συστήµατος y x Σχήµα 1.24: ισδιάτατη απεικόνιση των τροχιών του συστήµατος Lotka-Volterra
58 Σχήµα 1.25: Τρισδιάτατη απεικόνιση των τροχιών του συστήµατος Lotka-Volterra Dynamics of Lyapunov exponents Lyapunov exponents λ 1 = λ 2 = t Σχήµα 1.26: Εκθέτες Lyapunov του συστήµατος Lotka-Volterra
59 Εφαρµογή στη Οικονοµική επιστήµη Χάος σε οικονοµική χρονοσειρά Οι εκθέτες Lyapunov έχουν χρησιµοποιηθεί και στην οικονοµική επιστήµη και συγκεκριµένα για ελέγχο ύπαρξης µη γραµµικότητας και χαµηλής διάστασης χαοτικού ελκυστή στις ηµερήσιες αποδόσεις του Γενικού είκτη του Χρηµατιστηρίου Αξιών Αθηνών(Γ ΧΑΑ) για συκεκριµένο χρονικό διάστηµα. Οι µέχρι σήµερα επικρατέστερες απόψεις που διαιρούν το σύνολο των χρηµατοοικονοµικών αναλυτών, σχετικά µε την διαχρονική εξέλιξη των αποδόσεων στα χρηµατιστήρια µπορούν να ταξινοµηθούν σε δύο µεγάλες κατηγορίες: την τεχνική ανάλυση που υποστηρίζει την ύπαρξη κύκλων από την µια και την ποσοτική οικονοµική ανάλυση που δεν δέχεται την ύπαρξη κύκλων, αλλά µάλλον την παρουσία ενός τυχαίου περιπάτου στην εξέλιξη των αποδόσεων ως χρονοσειρά, από την άλλη. Έτσι, τα αποτελέσµατα έδειξαν την ύπαρξη µη γραµµικής συσχέτισης στη χρονοσειράς και ενός ελκυστή µικρής κλασµατικής διάστασης. Ένας σηµαντικός λόγος για το ενδιαφέρον που υπάρχει για την χαοτική συµπεριφορά, είναι ότι δυνάµει µπορεί να εξηγήσει τις διακυµάνσεις στην οικονοµία και τις χρηµαταγορές που φαίνεται να είναι τυχαίες. Εποµένως, υπάρχει αναγκαιότητα να εξεταστεί η παρουσία χάους σε αυτές. Σε συγκεκριµένη µελέτη επιλέχθηκαν ως χρονοσειρά αρχικών παρατηρήσεων οι ηµερήσιες λογαριθµικές αποδόσεις του Γ ΧΑΑ από τον Οκτώβριο του 1986 µέχρι το Φεβρουάριο του 1994, συνολικά 1810 παρατηρήσεις. Από αυτές τις παρατηρήσεις υπολογίζονται οι εκθέτες Lyapunov που ακολουθούν:

60 Σχήµα 1.27: Εκτίµηση του µεγαλύτερου εκθέτη Lyapunov για το οικονοµικό σύστηµα 60
61 61 Σχήµα 1.28: Εξέλιξη του εκθέτη Lyapunov στον χρόνο για το οικονοµικό σύστηµα Θα πρέπει επιπλέον, να σηµειωθεί ότι η ύπαρξη ενός θετικού εκθέτη L είναι χαρακτηριστικό της ύπαρξης χαοτικού ελκυστή στο σύστηµα. Η κύρια όµως συνθήκη για την ύπαρξή του είναι η διάστασή του. Πράγµατι, η υπολογισθείσα διάσταση για τον ελκυστή των αποδόσεων του Γ ΧΑΑ είναι Η χαµηλή αυτή τιµή θέτει επιπλέον το όριο των ελάχιστων µεταβλητών που θα µπορούσαν να υποδειγµατοποιήσουν ικανοποιητικά το σύστηµα στον αµέσως επόµενο ακέραιο, δηλαδή τον αριθµό 3. Το γεγονός αυτό δίνει πολλές ελπίδες στην προοπτική υποδειγµατοποίησης και αποτελεσµατικής πρόβλεψης των αποδόσεων του Γ ΧΑΑ.
62 Η αντίθετη άποψη:μη ύπαρξη χάους σε οικονοµική χρονοσειρά Υπάρχουν πολλές αναφορές για ύπαρξη χάους σε οικονοµική χρονοσειρά, όπως φαίνεται παραπάνω. Όµως, έρευνες που πραγµατοποιήθηκαν στα χρηµατιστήρια συναλλαγής µετοχών που περιέχουν πάνω από δεδοµένα δεν αποδεικνύουν την ύπαρξη χαοτικής συµπεριφοράς. Οι τρεις σειρές που χρησιµοποιήθηκαν είναι οι ρυθµοί συναλλαγής δολλαρίου µε γερµανικό µάρκο και δολλαρίου µε γαλλοελβετικό για µία και τρεις βδοµάδες αντίστοιχα και η καθηµερινή σειρά από το την συναλλαγή µετοχών στην Νέα Υόρκη. Έτσι, εφαρµόστηκε το πιο ισχυρό και δηµοφιλές τεστ για το χάος που βασίζεται στους εκθέτες Lyapunov. Ο αριθµός των δεδοµένων που χρησιµοποιήθηκαν στην έρευνα είναι ο µεγαλύτερος που υπήρξε ποτέ σε έρευνα χάους οικονοµικών σειρών. Οι συγκεκριµένοι ερευνητές παρατήρησαν ότι προηγούµενη εύρεση χαόυς σε τέτοιες σειρές µπορεί να προέρχεται λόγω πολύ µικρών χρονοσειρών. Ο µέγιστος εκθέτης Lyapunov υπολογίζεται από τον αλγόριθµο του Wolf µε ποικιλία τιµών των περισσότερων παραµέτρων. Στην περίπτωση των µετοχών, συνολικά υπολογίστηκαν εκθέτες. Συγκεκριµένα, είναι σηµαντικό να τονιστεί ότι οι υπολογισµοί έγιναν για ολόκληρα τα σύνολα δεδοµένων, και µετά για δύο δείγµατα των συνόλων δεδοµένων. Τα αποτελέσµατα παρουσιάζονται στο σχήµα 1.29 για τις µετοχές και στο 1.30 για τον ρυθµό συναλλαγής δολλαρίου-γερµανικού µάρκου. Είναι εµφανές από το σχήµα 1.29 ότι ο µέγιστος εκθέτης Lyapunov για τις µετοχές είναι µηδέν, η ασυµπτωτική τιµή του εκθέτη Lyapunov καθώς ο αριθµών των σηµείων στον άξονα του χρόνου τείνει σε µεγαλύτερες τιµές. Όπως φαίνεται στο σχήµα, ο υπολογισµός επαναλήφθηκε για υποδείγµατα που περιέχουν 5000 και σηµεία δεδοµένων. Το σχήµα 1.30 είναι ιδιαίτερα ενδιαφέρον, επειδή παρουσιάζει πως τα αποτελέσµατα εξαρτώνται από τον αριθµό των δεδοµένων που χρησιµοποιούνται. Αν είχαµε βασιστεί στο υποδείγµα των δεδοµέωνων, θα είχαµε καταλήξει ότι ο µέγιστος εκθέτης Lyapunov είναι οριακά θετικός, και εποµένως υπάρχει χάος. Ο υπολογισµός που επαναλήφθηκε µε δεδοµένα, δίνει ένα διαφορετικό παοτέλεσµα. Ο µέγιστος εκθέτης Lyapunov είναι οριακά αρµητικός. Το µόνο συµπέρασµα που µπορούµε να βγάλουµε είναι ότι δεν υπάρχει πουθενά ένδειξη χάους.
63 63 Σχήµα 1.29: Εκθέτης Lyapunov για την συναλλαγή µετοχών από δείγµατα 5000 και σηµείων και του ολόκληρου συνόλου των δεδοµένων Σχήµα 1.30: Εκθέτης Lyapunov για δεδοµένα δολλαρίου/γερµανικού µάρκου από δείγµατα 5000 και σηµείων και του ολόκληρου συνόλου των δεδοµένων 3.5 Εφαρµογή στην Αστρονοµία Όπως αναφέραµε προηγουµένως, ο Poincare έδειξε ότι υπάρχει µία ευαίσθητη εξάρτηση ττις αρχικές συνθήκες. Αν αυτό ισχύει στο ηλιακό µας σύστηµα, τότε η µακροπρόθεσµη προβλεπτικότητα χάνεται. Οι θέσεις, οι ταχύτητες, και οι µάζες των πλανητώντου ηλιακού συστήµατος είναι γνωστές µε µεγάλη ακρίβεια. Όµως, ακόµα και αυτές οι µετρήσεις χάνουν την ακρίβεια τους για την µακροπρόθεσµη προβλεπτικότητα υπό την παρουσία ευαίσθητης εξάρτησης από τις αρχικές συνθήκες. ύο κύριες ερωτήσεις υπάρχουν: Αν υπάρχει χάος στις πλανητικές τροχιές και

64 64 Αν υπάρχουν χαοτικές τροχιές, αν το χάος µπορεί να προκαλέσει έξοδο ενός πλανήτη από το σύστηµα, ή πλανητική σύγκρουση. Η ερώτηση για το αν υπάρχει χάος στο ηλιακό σύτηµα οδήγησε σε καινοτοµές στην θεωρία, σε αλγόριθµους, σε υπολογιστικό λογισµικό, και υλικό σε µία προσπάθεια να επιτευχθούν ακριβείς µοκροσκοπικές προσοµοιώσεις του ηλιακού συστήµατος. Το 1988, οι Sussman και Wisdom ανέφεραν µία 845 Myr(το Myr υποδηλώνει ένα εκατοµµύριο χρόνια) ολοκλήρωση βαρυτικών εξισώσεων για το ηλιακό σύστηµα. Ένα εκπληκτικό αποτέλεσµα της ολοκλήρωσης ήταν η ένδειξη ευαίσθητης εξάρτησης στην τροχιά του Πλούτωνα. Η γραφική δείχνει εκθετική απόκλιση δύο κοντινών τροχιών σε προσοµοίωση 100 Myr από τους Sussman και Wisdom. Έκαναν δύο διαφορετικές προσοµοιώσεις για το ηλιακό σύστηµα, και ήταν ίδιες εκτός από µία µικρή διαφορά στην αρχική συνθήκη για τον Πλούτωνα. Η καµπύλη δείχνει την απόσταση µεταξύ των θέσεων του Πλούτωνα για τις δύο διαφορετικές προσοµοιώσεις. Σχήµα 1.31: Εκθέτης Lyapunov για την τροχιά του Πλούτωνα Η εύρεση χάους στις τροχιές του ηλιακού συστήµατος δεν σηµαίνει ότι το ηλιακό σύστηµα είναι στο χείλος της διάλυσης, ή ότι η Γη σύντοµα θα περάσει στην τροχιά της Αφροδίτης. Όµως, αυτό εγκαθιστά ένα όριο στην ικανότητα της ουράνιας µηχανικής να προβλέψει κάποιο τέτοιο γεγονός στο µακρινό µέλλον.

")
65 Εφαρµογή σε χηµικές αντιδράσεις Στις αρχικές τάξεις χηµείας, πολύ µεγάλη έµφαση δίνεται στην εύρεση της κατάστασης ισορροπίας µίας αντίδρασης. Μελέτες σε ταλαντεύουσες αντιδράσεις αρχικά επικεντρώθηκαν στην αντίδραση Belousov- Zhabotinskii, στην οποία εµφανίζονται κατά την διάρκειά της 20 είδη µε αποτέλεσµα ο µηχανισµός της αντίδρασης να είναι πολύ περίπλοκος. Έτσι, δηµιουργήθηκαν χρονοσειρές της συγκέντρωσης των ουσιών και οι ειδικοί προσπάθησαν να τις αναλύσουν. Σχήµα 1.32: Χρονοσειρές που προκύπτουν από την αντίδραση Belousov- Zhabotinskii Έτσι µε την µέθοδο εµβύθισης συντεταγµένων χρονικής υστέρησης, δηµιουργούνται οι ελκυστές των σειρών που είναι χαοτικοί(σχήµα ) Σχήµα 1.33: Χαοτικοί ελκυστές που προκύπτουν από την αντίδραση Belousov- Zhabotinskii Από αυτήν την γραφική, µία µονοδιάστατη απεικόνιση µπορεί να δηµιουργηθεί ως απεικόνιση Poincare και από αυτό µπορεί να υπολογιστεί ο εκθέτης Lyapunov.
66 66 Σχήµα 1.34: Απεικόνιση Poincare για την αντίδραση Belousov- Zhabotinskii Έτσι, µε τον αλγόριθµο των Wolf et al. εφαρµοσµένο σε χρονοσειρά σηµείων, ο εκθέτης Lyapunov υπολογίζεται ως ± bits/sec. Σχήµα 1.35: Εκθέτες Lyapunov για την αντίδραση Belousov- Zhabotinskii από αλγόριθµο Wolf Επίσης, µετά από σειρά πειραµάτων, η οµάδα ειδικών ανακάλυψε ότι οι ίδιες πειραµατικές συνθήκες έδιναν διαφορετικά αποτελέσµατα. Οι ελκυστές παρόλο, που παρέµεναν χαοτικοί, άλλαζαν σχήµατα. Εποµένως, το συµπέρασµα που έβγαλαν ήταν η υπερβολική ευαισθησία της δυναµικής σε σχέση µε τις παραµέτρους του συστήµατος.
67 67 ΚΕΦΑΛΑΙΟ 4 ΠΕΙΡΑΜΑΤΙΚΑ ΑΠΟΤΕΛΕΣΜΑΤΑ 4.1 Εισαγωγή Σε αυτό το κεφάλαιο, θα χρησιµοποιήσουµε διάφορα συστήµατα συνεχούς και διακριτού χρόνου, των οποίων θα υπολογίσουµε τους εκθέτες Lyapunov, χρησιµοποιώντας τους παραπάνω αλγόριθµους, αρχίζοντας µε τον πιο πολλά υποσχόµενο, σε διάφορα προγράµµατα, όπως στο Matlab, στο DevC++ και στο Mathematica. Στο τέλος θα συγκρίνουµε τα αποτελέσµατα που θα προκύψουν και θα καταλήξουµε στο πoιος αλγόριθµος δουλεύει καλύτερα. Τα συστήµατα στα οποία θα βασιστούµε και θα προσοµοιώσουµε θα είναι κυρίως τα παρακάτω: Ελκυστής του Lorenz O ελκυστής του Lorenz είναι ένας ελκυστής που ορίζεται από ένα απλοποιηµένο σύστηµα εξισώσεων που περιγράφουν την δισδιάστατη ροή υγρού (1.53) (1.54) (1.55) και είναι γνωστές ως οι εξισώσεις του Lorenz. Επίσης, ο Lorenz αντιλήφθηκε ότι η λύση σε αυτές τις εξισώσεις κατέχει ευαίσθητη εξάρτηση από τις αρχικές συνθήκες. Αυτό είναι το λεγόµενο φαινόµενο πεταλούδας που προτείνει την αδυναµία µακροπρόθεσµης καιρικής πρόβλεψης. Ο χαοτικός ελκυστής του Lorenz έχει την παρακάτω µορφή(ο κώδικας εµφανίζεται στο παράρτηµα σε µορφή Simulink):

68 68 Σχήµα 1.36: Χαοτικός ελκυστής του συστήµατος Lorenz Επίσης σε τρισδιάστατη απεικόνιση από συγκεκριµένο toolbox του Matlab (Matds), έχουµε: Σχήµα 1.37: Τρισδιάστατη απεικόνιση του χαοτικού ελκυστή Lorenz Παρατηρούµε ότι η τροχιά δεν τέµνει τον εαυτό της. Για σ=10, b=8/3, ο Lorenz βρήκε αριθµητικά ότι το σύστηµα συµπεριφέρεται χαοτικά όποτε το r ξεπερνά µία κρίσιµη τιµή r Αυτό συµβαίνει γιατί, όλες οι λύσεις εµφανίζονται να είναι ευαίσθητες σε αρχικές συνθήκες, και σχεδόν όλες τους δεν είναι προφανώς ούτε περιοδικές λύσεις ούτε συγκλίνουν σε περιοδικές λύσεις ή καταστάσεις ισορροπίας. Έτσι, κατέληξε στα παρακάτω συµπεράσµατα:
69 69 r Ελκυστής [-,1.00] (0,0,0) σηµείο ισορροπίας που ελκύει [1.00,13.93] C + και C - σηµεία ισορροπίας που ελκύουν, η αρχή των αξόνων είναι ασταθής [13.93,24.06] Παροδικό χάος: υπάρχουν χαοτικές τροχιές αλλά όχι χαοτικοί ελκυστές [24.06,24.74] Ένας χαοτικός ελκυστής συνυπάρχει µε τα C + και C - σηµεία ισορροπίας που ελκύουν [24.74,?] Χάος: χαοτικός ελκυστής υπάρχει αλλά τα C + και C - δεν ελκύουν πλέον Σχήµα 1.38: Για σ=10, b=8/3, ένα ευρύ φάσµα φαινοµένων συµβαίνει όταν το r µεταβάλλεται για το σύστηµα Lorenz Απεικόνιση του Hénon Η απεικόνιση του Hénon είναι ένα δυναµικό σύστηµα διακριτού χρόνου. Είναι ένα από τα πιο µελετηµένα παραδείγµατα δυναµικών συστηµάτων που παρουσιάζουν χαοτική συµπεριφορά. Η απεικόνιση του Hénon παίρνει ένα σηµείο (x n, y n ) στον χώρο και το απεικονίζει σε ένα νέο σηµείο (1.56) (1.57) Η απεικόνιση εξαρτάται από 2 παραµέτρους, α και b, που για την κανονική αναπαράσταση του Hénon έχουν τιµές α=1.4 και b=0.3. Για τις κανονικές τιµές η απεικόνιση του Hénon είναι χαοτική. Για άλλες τιµές των α και b, η απεικόνιση µπορεί να είναι χαοτική, διαλειπτική, ή συγκλίνει σε µία περιοδική τροχιά. Για την κανονική απεικόνιση, ένα αρχικό σηµείο του χώρου ή θα προσεγγίζει ένα σύνολο σηµείων γνωστών ως ο παράξενος ελκυστής του Hénon, ή θα αποκλίνει στο άπειρο. Ο χαοτικός ελκυστής του Hénon έχει την παρακάτω µορφή(ο κώδικας εµφανίζεται στο παράρτηµα):
70 70 Chaotic attractor for Henon map y x Σχήµα 1.39: Χαοτικός ελκυστής του συστήµατος Hénon Τρέχοντας κατάλληλο πρόγραµµα για τον υπολογισµό των εκθετών Lyapunov της αναπαράστασης Hénon µε α=1.2 και b=0.4, αυτοί υπολογίζονται ως h1= h2= είναι Επίσης, τρέχοντας το LET πρόγραµµα(βλέπε ), οι εκθέτες Lyapunov h1= h2= -1.25
71 x 10 4 Σχήµα 1.40: Εκθέτες Lyapunov για το σύστηµα Hénon Στο παράρτηµα υπάρχει πρόγραµµα που τρέχει στα Dos και υπολογίζει τους εκθέτες Lyapunov της αναπαράστασης Hénon Λογιστική απεικόνιση Η λογιστική απεικόνιση(logistic map) χρησιµοποιήθηκε για πρώτη φορά το 1845 από τον Βέλγο µαθηµατικό Pierre Francois Verhulst, ως ένα µοντέλο που περιέγραφε την χρονική εξέλιξη ενός πληθυσµού µιας αποικίας έµβιων όντων. Ο Verhulst θεώρησε ότι αν p n και p n+1 είναι ο πληθυσµός της αποικίας τις χρονικές στιγµές n και n+1 αντίστοιχα, τότε ο ρυθµός µεταβολής της ανάπτυξης του πληθυσµού (1.58) είναι ανάλογος της δυνατότητας που έχει το σύστηµα πληθυσµού p n να υποστεί περεταίρω ανάπτυξη, µέσα στα πλαίσια του υπάρχοντος οικοσυστήµατος. Αυτό σηµαίνει πως αν συµβολίσουµε µε την µονάδα την συνολική δυνατότητα του συστήµατος, και µε p n την τρέχουσα τιµή του πληθυσµού, τότε, η εναποµείνασα δυνατότητα είναι ίση µε 1- p n, και εποµένως η χρονική εξέλιξη του πληθυσµού θα δίνεται από την εξίσωση (1.59)
72 72 όπου η παράµετρος r αντιστοιχεί σε κάποια σταθερή τιµή. Αν επιλύσουµε την παραπάνω εξίσωση ως προς, αυτή θα λάβει την µορφή (1.60) Η παραπάνω εξίσωση µπορεί να απλοποιηθεί ακόµα περισσότερο, εάν χρησιµοποιήσουµε µια νέα µεταβλητή, την και ορίσουµε µία νέα σταθερά λ, ως λ=r+1. Στην περίπτωση αυτή, η εξίσωση µετασχηµατίζεται στην µορφή η οποία είναι γνωστή ως λογιστική απεικόνιση(logistic map), και περιγράφει ένα δυναµικό σύστηµα διακριτού χρόνου που χρησιµοποιείται σε πάρα πολλές περιπτώσεις µελέτης χαοτικών συστηµάτων. Το λ κυµαίνεται στο διάστηµα [0,4]. (1.61) Στο παράρτηµα υπάρχει πρόγραµµα στο Matlab που υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov της λογιστικής αναπαράστασης, που εµφανίζεται παρακάτω: λ>0: Chaotic Lyapunov exponent of Logistic map λ(x 0 )=(1/n) lim [ Σ 0 n-1 log f, (xi ) ] Lce λ<0: Deterministic α 4 Σχήµα 1.41: Εκθέτες Lyapunov για την λογιστική απειλόνιση καθώς το α µεταβάλλεται Παρατηρούµε ότι όσο αυξάνεται το λ, το σύστηµα γίνεται και πιο χαοτικό, αλλά παρόλα αυτά υπάρχουν στιγµές που µία συγκεκριµένη τιµή του λ κάνει το σύστηµα ξανά ντετερµινιστικό.
73 73 Επιπλέον, υπάρχει πρόγραµµα που υπολογίζει τον εκθέτη Lyapunov της λογιστικής απεικόνισης συγκεκριµένα για λ=4, και το αποτέλεσµα είναι Liap_exp = Επίσης, υπάρχει πρόγραµµα που εµφανίζει το διάγραµµα διακλάδωσης για συγκεκριµένη τιµή του λ, την εικόνα µίας τροχιάς για δεδοµένο λ και µία επιλογή αρχικού σηµείου και τέλος, δηµιουργεί ένα γράφηµα της κατανοµής των σηµείων στην ίδια τροχιά και υπολογίζει την συνάρτηση αυτοσυσχέτισης. Bifurcation diagram for logistic map Coordinate X Parameter lambda Σχήµα 1.42: ιάγραµµα διακλάδωσης για την λογιστική απεικόνιση 4
74 74 1 Orbit of the chosen initial point Iterate F[X] Coordinate X Σχήµα 1.43: Τροχιά του αρχικού σηµείου της λογιστικής απεικόνισης 300 Density of the orbit points on [0,1] Σχήµα 1.44: Κατανοµή λογιστικής απεικόνισης
75 75 1 Autocorrelation function for the symbolic sequence Σχήµα 1.45: Συνάρτηση αυτοσυσχέτισης λογιστικής απεικόνισης Απεικόνιση του Ikeda Στα µαθηµατικά, η απεικόνιση Ikeda είναι ένα δυναµικό σύστηµα διακριτού χρόνου που δίνεται από τις παρακάτω εξισώσεις: (1.62) (1.63) όπου u είναι µία παράµετρος και (1.64) Για κάποιες τιµές του u, αυτό το σύστηµα έχει χαοτικό ελκυστή. Ο χαοτικός ελκυστής του Ikeda έχει την παρακάτω µορφή(ο κώδικας εµφανίζεται στο παράρτηµα):
76 Imag E Real E Σχήµα 1.46: Χαοτικός ελκυστής της απεικόνισης Ikeda Επίσης, το φάσµα Lyapunov της απεικόνισης Ikeda υπολογίζεται στο παράρτηµα σε πρόγραµµα της γλώσσας C για χρόνο [0,1000] και είναι [ , ] Ελκυστής Rössler Ο ελκυστής του Rössler είναι ο ελκυστής του συστήµατος του Rössler, ενός συστήµατος τριών µη γραµµικών κανονικών διαφορικών εξισώσεων. Αυτές οι διαφορικές εξισώσεις ορίζουν ένα δυναµικό σύστηµα συνεχούς χρόνου που παρουσιάζει χαοτική δυναµική. Κάποιες ιδιότητες του συστήµατος Rössler µπορούν να εξαχθούν µέσω γραµµικών µεθόδων όπως τα ιδιοδιανύσµατα, αλλά τα κύρια χαρακτηριστικά του συστήµατος απαιτούν µη γραµµικές µεθόδους, όπως τις απεικονίσεις Poincaré και τα διαγράµµατα διακλάδωσης. Η πρωτότυπη εργασία Rössler λέει ότι ο ελκυστής του Rössler στόχευε να συµπεριφέρεται παρόµοια µε τον ελκυστή του Lorenz, αλλά να είναι επίσης ευκολότερος στην ποιοτική ανάλυση. Ο Otto Rössler σχεδίασε τον ελκυστή Rössler το 1976, αλλά οι αρχικά θεωρητικές εξισώσεις έγιναν αργότερα χρήσιµες στην σχεδίαση σηµείου ισορροπίας στις χηµικές αντιδράσεις. Οι εξισώσεις είναι: (1.65)
77 77 (1.66) (1.67) O Rössler µελέτησε τον χαοτικό ελκυστή µε α=0.2, b=0.2 και c=5.7, παρόλο που οι ιδιότητες του α=0.1, b=0.1 και c=14 είχαν χρησιµοποιηθεί πιο συχνά πριν. Παρακάτω εµφανίζεται µία δισδιάστατη απεικόνιση(µέσω του toolbox Matds) y x Σχήµα 1.47: ισδιάστατη απεικόνιση του χαοτικού ελκυστή του Rössler Και η τρισδιάστατη απεικόνιση είναι:

78 Σχήµα 1.48: Τρισδιάστατη απεικόνιση του χαοτικού ελκυστή του Rössler 78







79 Σχήµα 1.49: Ελκυστές του Rössler για διαφορετικές τιµές του c 79
 στον χώρο και το απεικονίζει σε ένα νέο σηµείο που δίνεται από: (1.68) (1.69) Η απεικόνιση εξαρτάται από τις δύο σταθερές α και b.")
80 Απεικόνιση Duffing Η απεικόνιση Duffing είναι ένα δυναµικό σύστηµα διακριτού χρόνου. Είναι ένα παράδειγµα ενός δυναµικού συστήµατος που παρουσιάζει χαοτική συµπεριφορά. Η απεικόνιση Duffing παίρνει ένα σηµείο (x n, y n ) στον χώρο και το απεικονίζει σε ένα νέο σηµείο που δίνεται από: (1.68) (1.69) Η απεικόνιση εξαρτάται από τις δύο σταθερές α και b. Αυτές συχνά ορίζονται σαν α=2.75 και b=0.2 για να παράγουν χαοτική συµπεριφορά. Είναι µία διακριτή εκδοχή της εξίσωσης Duffing. Έτσι, χρησιµοποιώντας το πρόγραµµα LET(βλέπε ), υπολογίζουµε τους εκθέτες Lyapunov. Σχήµα 1.50: Κεντρικό παράθυρο διαλόγου για το tollbox LET του Matlab

81 81 Σχήµα 1.51: Παράθυρο επιλογής παραµέτρων Σχήµα 1.52: Εκθέτες Lyapunov του συστήµατος Duffing
82 82 Παρατηρούµε ότι οι εκθέτες Lyapunov είναι , 0 και και η διάσταση Lyapunov είναι Παρακάτω εµφανίζεται µία δισδιάστατη απεικόνιση(µέσω του toolbox Matds) y x Σχήµα 1.53: ισδιάστατη απεικόνιση του ελκυστή του συστήµατος Duffing Εξίσωση Van Der Pol Η εξίσωση Van der Pol είναι µία κανονική διαφορική εξίσωση που προέρχεται από την διαφορική εξίσωση Rayleigh διαφορίζοντας και θέτοντας. Έτσι, χρησιµοποιώντας το πρόγραµµα LET(βλέπε ), υπολογίζουµε τους εκθέτες Lyapunov.

83 83 Σχήµα 1.54:Κεντρικό παράθυρο διαλόγου για το tollbox LET του Matlab Σχήµα 1.55: Παράθυρο επιλογής παραµέτρων
84 Σχήµα 1.56: Εκθέτες Lyapunov του συστήµατος Van der Pol Έτσι, οι εκθέτες Lyapunov προκύπτουν από το Matlab λ 1 = , λ 2 =0, λ 3 = και η διάσταση Lyapunov είναι Παρακάτω εµφανίζεται µία δισδιάστατη απεικόνιση(µέσω του toolbox Matds) y x Σχήµα 1.57: ισδιάστατη απεικόνιση του ελκυστή Van der Pol
85 85 και η τρισδιάστατη απεικόνιση είναι: Σχήµα 1.58: Τρισδιάστατη απεικόνιση του ελκυστή Van der Pol Ταλαντωτής Colpitts Ο ταλαντωτής Colpitts, ονοµαζόµενος από τον εφευρέτη του Edwin H. Colpitts, είναι ένα από πλήθος σχεδίων για κυκλώµατα ηλεκτρονικών ταλαντωτών που χρησιµοποιεί έναν συνδυασµό επαγωγής µε έναν πυκνωτή για καθορισµό συχνότητας, που επίσης ονοµάζεται LC ταλαντωτής. Ένα από τα κύρια χαρακτηριστικά αυτού του τύπου ταλαντωτή είναι η απλότητά του και η σθεναρότητά του. O ακόλουθος αλγόριθµος υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για τον ταλαντωτή Colpitts και το πρόγραµµα που χρησιµοποιείται είναι το LyapOde (βλέπε ).
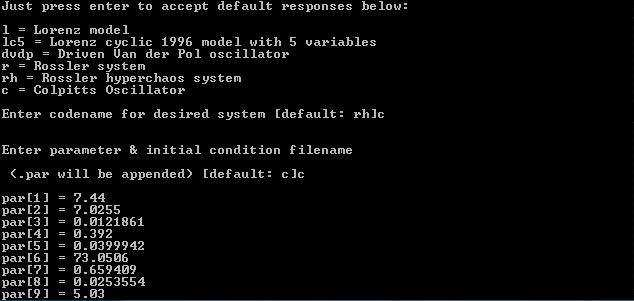

86 86
 σύστηµα είναι ένα µοντέλο κόστους που αναγνωρίζει ενέργειες σε έναν οργανισµό και")

87 Σύστηµα ABC Το Activity-based costing (ABC) σύστηµα είναι ένα µοντέλο κόστους που αναγνωρίζει ενέργειες σε έναν οργανισµό και αναθέτει το κόστος κάθε πηγής ενέργειας σε όλα τα προϊόντα και υπηρεσίες σύµφωνα µε την πραγµατική κατανάλωση κάθε µίας. Με αυτόν τον τρόπο ένας οργανισµός µπορεί να εκτιµήσει ακριβώς το κόστος των ανεξάρτητων προϊόντων και υπηρεσιών για τους λόγους αναγνώρισης και εξάλειψης αυτών που είναι χωρίς µη προσοδοφόρα και µείωσης της τιµής αυτών που είναι υπερεκτιµηµένα. Οι εξισώσεις είναι της µορφής:

88 88 (1.70) (1.71) (1.72) Με το toolbox Matds του Matlab που χρησιµοποιεί τον αλγόριθµο των Wolf et al. έχουµε: Σχήµα 1.59: Κεντρικό παράθυρο ελέγχου του toolbox Matds του Matlab Έτσι, η δισδιάστατη απεικόνιση είναι: y x Σχήµα 1.60: ισδιάστατη απεικόνιση του ελκυστή ABC
89 89 Η τρισδιάστατη απεικόνιση είναι: Τέλος, οι εκθέτες Lyapunov είναι: Σχήµα 1.61: Τρισδιάστατη απεικόνιση του ελκυστή ABC Dynamics of Lyapunov exponents Lyapunov exponents λ 1 = λ = λ 3 = t Σχήµα 1.62: Εκθέτες Lyapunov του συστήµατος ABC
90 Κύκλωµα Chua Ένα µάλλον απλό ηλεκτρικό κύκλωµα έγινε διάσηµο για την µελέτη του χάους κατά την δεκαετία του Σχεδιάστηκε από τον L. Chua, έναν καθηγητή ηλεκτρολόγο µηχανικό και είναι ένα RLC κύκλωµα µε τέσσερα γραµµικά στοιχεία (δύο πυκνωτές, έναν αντιστάτη, και έναν επαγωγέα) και µία µη γραµµική δίοδο, που µπορεί να µοντελοποιηθεί από το παρακάτω σύστηµα διαφορικών εξισώσεων: (1.73) (1.74) (1.75) Σχήµα 1.63: Κύκλωµα Chua y x Σχήµα 1.64: ισδιάστατη απεικόνιση του ελκυστή του κυκλώµατος Chua
91 Σχήµα 1.65: Τρισδιάστατη απεικόνιση του ελκυστή του κυκλώµατος Chua







92 Σχήµα 1.66: Eλκυστές του κυκλώµατος Chua για διαφορετικές τιµές του c 92
93 Εφαρµογή αλγορίθµων Αρχικά, θα ξεκινήσουµε µε την εφαρµογή του αλγορίθµου των Wolf et al. για διάφορα συστήµατα Αλγόριθµος των Wolf et al Σύστηµα Lorenz O ακόλουθος αλγόριθµος υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για το σύστηµα Lorenz παίρνοντας σαν παραµέτρους στο εν λόγω σύστηµα SIGMA = 16, R = 45.92, BETA = 4. Το κυρίως πρόγραµµα αποτελείται από τον παρακάτω κώδικα: n=3;rhs_ext_fcn=@lorenz_ext;fcn_integrator=@ode45; tstart=0;stept=0.5;tend=500; ystart=[ ];ioutp=10; [Texp,Lexp]=lyapunov(3,@lorenz_ext,@ode45,0,0.5,500,[ ],10); Έπειτα, ακολουθούν οι δύο συναρτήσεις, η µία για τον υπολογισµό των εκθετών Lyapunov και η άλλη για τον ορισµό του συστήµατος Lorenz αντίστοιχα. function[texp,lexp]=lyapunov(n,rhs_ext_fcn,fcn_integrator,tstart,stept,ten d,ystart,ioutp); % Input parameters: % n - number of equation % rhs_ext_fcn - handle of function with right hand side of extended ODEsystem. % fcn_integrator - handle of ODE integrator function, for % tstart - start values of independent value (time t) % stept - step on t-variable for Gram-Schmidt renormalization procedure. % tend - finish value of time % ystart - start point of trajectory of ODE system. % ioutp - step of print to MATLAB main window. ioutp==0 - no print, % if ioutp>0 then each ioutp-th point will be print. % % Output parameters: % Texp - time values % Lexp - Lyapunov exponents to each time value. n1=n; n2=n1*(n1+1); % Number of steps. nit = round((tend-tstart)/stept); % Memory allocation. y=zeros(n2,1); cum=zeros(n1,1); y0=y; gsc=cum; znorm=cum; % Initial values. y(1:n)=ystart(:); for i=1:n1 y((n1+1)*i)=1.0; end; t=tstart;
94 % Main loop. for ITERLYAP=1:nit % Solutuion of extended ODE system. [T,Y] = feval(fcn_integrator,rhs_ext_fcn,[t t+stept],y); t=t+stept; y=y(size(y,1),:); for i=1:n1 for j=1:n1 y0(n1*i+j)=y(n1*j+i); end; end; % Construct new orthonormal basis by Gram-Schmidt. znorm(1)=0.0; for j=1:n1 znorm(1)=znorm(1)+y0(n1*j+1)^2; end; znorm(1)=sqrt(znorm(1)); for j=1:n1 y0(n1*j+1)=y0(n1*j+1)/znorm(1); end; for j=2:n1 for k=1:(j-1) gsc(k)=0.0; for l=1:n1 gsc(k)=gsc(k)+y0(n1*l+j)*y0(n1*l+k); end; end; for k=1:n1 for l=1:(j-1) y0(n1*k+j)=y0(n1*k+j)-gsc(l)*y0(n1*k+l); end; end; znorm(j)=0.0; for k=1:n1 znorm(j)=znorm(j)+y0(n1*k+j)^2; end; znorm(j)=sqrt(znorm(j)); for k=1:n1 y0(n1*k+j)=y0(n1*k+j)/znorm(j); end; end; % Update running vector magnitudes. for k=1:n1 cum(k)=cum(k)+log(znorm(k)); end; % Normalize exponent. for k=1:n1 lp(k)=cum(k)/(t-tstart); end; % Output modification. if ITERLYAP==1 Lexp=lp; Texp=t; else Lexp=[Lexp; lp]; Texp=[Texp; t]; end; for i=1:n1 for j=1:n1 y(n1*j+i)=y0(n1*i+j); end; end; end; % Show the Lyapunov exponent values on the graph. str1=num2str(lexp(nit,1));str2=num2str(lexp(nit,2));str3=num2str(lexp(nit, 3)); plot(texp,lexp); title('dynamics of Lyapunov Exponents'); text(235,1.5,'\lambda_1=','fontsize',10); text(250,1.5,str1); 94
95 95 text(235,-1,'\lambda_2=','fontsize',10); text(250,-1,str2); text(235,-13.8,'\lambda_3=','fontsize',10); text(250,-13.8,str3); xlabel('time'); ylabel('lyapunov Exponents'); % End of plot function f=lorenz_ext(t,x); % Values of parameters. SIGMA = 16; R = 45.92; BETA = 4; x=x(1); y=x(2); z=x(3); Y= [X(4), X(7), X(10); X(5), X(8), X(11); X(6), X(9), X(12)]; f=zeros(9,1); %Lorenz equation. f(1)=sigma*(y-x); f(2)=-x*z+r*x-y; f(3)=x*y-beta*z; %Linearized system. Jac=[-SIGMA, SIGMA, 0; R-z, -1, -x; y, x, -BETA]; %Variational equation. f(4:12)=jac*y; %Output data must be a column vector. 5 Dynamics of Lyapunov Exponents 0 λ 1 = λ 2 = Lyapunov Exponents λ 3 = Time Σχήµα 1.67: Εκθέτες Lyapunov του συστήµατος Lorenz
96 96 Παρατηρούµε ότι οι εκθέτες Lyapunov είναι τρεις, όσες οι διαφορικές εξισώσεις και είναι λ 1 =1.4913, λ 2 = και λ 3 = Παραπάνω αναφέρθηκε ότι ο Lorenz απέδειξε αριθητικά ότι το σύστηµα αρχίζει να γίνεται χαοτικό για σ=10, b=8/3 και r= Αν τρέξουµε τον αλγόριθµο, παρατηρούµε ότι για r=24, το σύστηµα αρχίζει ως χαοτικό και µετά γίνεται µη χαοτικό. 10 Dynamics of Lyapunov exponents 5 Lyapunov exponents Time Σχήµα 1.68: Εκθέτες Lyapunov του συστήµατος Lorenz Έτσι, έχουµε λ 1 = , λ 2 = και λ 3 = Όσο και αν µειώσουµε το r, αυτό συνεχίζει να συµβαίνει. Εποµένως, αυτός ο αλγόριθµος δεν λειτουργεί ικανοποιητικά όταν οι εκθέτες Lyapunov βρίσκονται γύρω από το µηδέν Σύστηµα Rössler O ακόλουθος αλγόριθµος υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για το σύστηµα Rössler παίρνοντας σαν παραµέτρους στο εν λόγω σύστηµα a = 0.15, b = 0.20, c = 10.0 µε αποτέλεσµα να καταλήγουµε σε χαοτικό σύστηµα. Το κυρίως πρόγραµµα αποτελείται από τον παρακάτω κώδικα: [T,Res]=lyapunov(3,@rosler_ext,@ode45,0,0.5,1000,[ ],10); plot(t,res); title('dynamics of Lyapunov exponents'); xlabel('time'); ylabel('lyapunov exponents'); Έπειτα, ακολουθούν οι δύο συναρτήσεις, η µία για τον υπολογισµό των εκθετών Lyapunov και η άλλη για τον ορισµό του συστήµατος Rössler αντίστοιχα.
97 function [Texp,Lexp]=lyapunov(n,rhs_ext_fcn,fcn_integrator,tstart,stept,tend,ystart,ioutp); n1=n; n2=n1*(n1+1); % Number of steps nit = round((tend-tstart)/stept); % Memory allocation y=zeros(n2,1); cum=zeros(n1,1); y0=y; gsc=cum; znorm=cum; % Initial values y(1:n)=ystart(:); for i=1:n1 y((n1+1)*i)=1.0; end; t=tstart; % Main loop for ITERLYAP=1:nit % Solutuion of extended ODE system [T,Y] = feval(fcn_integrator,rhs_ext_fcn,[t t+stept],y); t=t+stept; y=y(size(y,1),:); for i=1:n1 for j=1:n1 y0(n1*i+j)=y(n1*j+i); end; end; % construct new orthonormal basis by gram-schmidt znorm(1)=0.0; for j=1:n1 znorm(1)=znorm(1)+y0(n1*j+1)^2; end; znorm(1)=sqrt(znorm(1)); for j=1:n1 y0(n1*j+1)=y0(n1*j+1)/znorm(1); end; for j=2:n1 for k=1:(j-1) gsc(k)=0.0; for l=1:n1 gsc(k)=gsc(k)+y0(n1*l+j)*y0(n1*l+k); end; end; for k=1:n1 for l=1:(j-1) y0(n1*k+j)=y0(n1*k+j)-gsc(l)*y0(n1*k+l); end; end; znorm(j)=0.0; for k=1:n1 znorm(j)=znorm(j)+y0(n1*k+j)^2; end; znorm(j)=sqrt(znorm(j)); for k=1:n1 y0(n1*k+j)=y0(n1*k+j)/znorm(j); end; end; % update running vector magnitudes for k=1:n1 cum(k)=cum(k)+log(znorm(k)); end; % normalize exponent for k=1:n1 lp(k)=cum(k)/(t-tstart); end; % Output modification if ITERLYAP==1 Lexp=lp; Texp=t; else Lexp=[Lexp; lp]; Texp=[Texp; t]; 97
98 98 end; if (mod(iterlyap,ioutp)==0) fprintf('t=%6.4f',t); for k=1:n1 fprintf(' %10.6f',lp(k)); end; fprintf('\n'); end; for i=1:n1 for j=1:n1 y(n1*j+i)=y0(n1*i+j); end; end; end; function f=rosler_ext(t,x) % Values of parameters %a = 0.2; b = 0.2; c = 3.0; % Periodic a = 0.15; b = 0.20; c = 10.0; % chaotic x=x(1); y=x(2); z=x(3); Y= [X(4), X(7), X(10); X(5), X(8), X(11); X(6), X(9), X(12)]; f=zeros(9,1); %rosler equation f(1)=-y - z; f(2)=x + a*y; f(3)=b + z*(x - c); %Linearized system Jac=[0-1 -1; 1 a 0; z 0 x-c]; %Variational equation f(4:12)=jac*y; %Output data must be a column vector
99 99 2 Dynamics of Lyapunov exponents 0-2 Lyapunov exponents Time Σχήµα 1.69: Εκθέτες Lyapunov του συστήµατος Rössler Έτσι, οι εκθέτες Lyapunov προκύπτουν από το Matlab για t= λ 1 = , λ 2 = , λ 3 = Αλγόριθµος των Eckmann και Ruelle Σύστηµα Lorenz O ακόλουθος αλγόριθµος υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για το σύστηµα Lorenz παίρνοντας σαν παραµέτρους στο εν λόγω σύστηµα SIGMA = 16, R = 45.92, BETA = 4 σε γλώσσα C. Το πρόγραµµα που χρησιµοποιείται είναι το LyapOde για τον υπολογισµό του πλήρους φάσµατος των εκθετών Lyapunov από ένα σύνολο κανονικών διαφορικών εξισώσεων(odes). Χρησιµοποιεί την QR µέθοδο διάσπασης των Eckmann και Ruelle. Μπορεί επίσης να χρησιµοποιεί την επαναληπτική QR µέθοδο των Abarbanel, Brown and Kennel που δίνει παρόµοια αποτελέσµατα. Οι Ιακωβιανές µήτρες των εξισώσεων απαιτούνται και από τις δύο µεθόδους. Ο κύριος αλγόριθµος ακολουθεί παρακάτω: #include <math.h> #include <stdio.h> #include <stdlib.h> #include <string.h>
100 100 #define bzero(s,n) memset(s,0,(size_t)(n)) #define PI #define NUMWT 1000 #define MISCMAX #define buf_size 1024 int nvar, npar, UseAJ=0, ComputeCLE=0, SyncMeth=1, *CoupVar, ImpPer=1,nvar1,nvar2,nvar3,NumCoup=1; double *par, **djac,impstren= -1.0,CoupStren= 0.0,SubFrac=1.0, *ytemp; double timestep; void (*derivs)(double, double [], double []); void (*jacob)(double, double []); int setderivs(char mod[]); void deri(double t,double y[],double dydt[]); void matmult(int nvari, double **A, double **B, double **C); void rk4std(int ndim, double time,double step,double yin[],double yout[], double k1[],double k2[],double k3[],double k4[], void (*deri)(double, double [], double [])); void qr(double **A, double **Q, double **R, int nn, double *cc, double *dd, int *sing); void lyap(); //fortran style indexing versions: double *array1df(long vals); double **array1dfp(long ptrs); int *array1if(long vals); char *array1cf(long vals); double **array2df(long ptrs,long vals); double ***array3df(long ptrs3,long ptrs2,long vals); void free1df(double *ar1); void free1dfp(double **ar1); void free1if(int *ar1); void free1cf(char *ar1); void free2df(double **ar2); void free3df(double ***ar3); int main() { while(1)lyap(); void lyap(void)//calculate Lyapunov Exponents { char command[50] ="r"; char string[50]; static char model_type[50]="l",par_file[50]; int i,j,k,i1,j1,itst,imap,icyc,*sing; static int ntst=50,ncyc=0,nmap=20000,npre=20000,prper=1000,chpar=0; //double tt=0.0,tstart=0.0; int tt=0,tstart=0; static double doff=1e-8,coupfac,voff=0.0001,vrms; double *v,*vstart,*vout,*cc,*dd,*lyapsum,**a,**q,**r,**jaco,**qi,***j; double *k1,*k2,*k3,*k4; FILE *par_fp; while(1){
101 101 printf("\n\n Just press enter to accept default responses below:"); printf("\n\n l = Lorenz model"); printf("\n lc5 = Lorenz cyclic 1996 model with 5 variables"); printf("\n dvdp = Driven Van der Pol oscillator"); printf("\n r = Rossler system"); printf("\n rh = Rossler hyperchaos system"); printf("\n c = Colpitts Oscillator"); printf("\n\n Enter codename for desired system [default: %s]",model_type); fgets(string,50,stdin); sscanf(string,"%s",&model_type); if(setderivs(model_type)==1)break; printf("\n\n *****************BAD SYSTEM NAME******************"); printf("\n\n **note that case matters and 'l' is lower case L**"); par=array1df(npar+nvar); //parameter array includes initial conditions for each variable v=array1df(nvar*(nvar+2));//includes space for analytic jacobian and driver system if needed vstart=array1df(nvar+nvar); ytemp=array1df(nvar); vout=array1df(nvar*(nvar+2));//includes space for analytic jacobian and driver system if needed cc=array1df(nvar); dd=array1df(nvar); lyapsum=array1df(nvar); sing=array1if(nvar); CoupVar=array1if(nvar); k1=array1df(nvar*(nvar+2));//includes space for analytic jacobian and driver system if needed k2=array1df(nvar*(nvar+2));//includes space for analytic jacobian and driver system if needed k3=array1df(nvar*(nvar+2));//includes space for analytic jacobian and driver system if needed k4=array1df(nvar*(nvar+2));//includes space for analytic jacobian and driver system if needed A=array2df(nvar,nvar); Q=array2df(nvar,nvar); Qi=array2df(nvar,nvar); R=array2df(nvar,nvar); Jaco=array2df(nvar,nvar); djac=array2df(nvar,nvar); for(i=2;i<=nvar;i++)coupvar[i]=0; CoupVar[1]=1; strcpy(par_file,model_type); while(1){//open par file loop printf("\n\n Enter parameter & initial condition filename"); printf("\n\n (.par will be appended) [default: %s]",par_file); fgets(string,50,stdin); sscanf(string,"%s",&par_file); sprintf(string,"%s.par",par_file); par_fp=fopen(string,"r"); if(par_fp!=null)break; else printf("\n\ncan't find file %s",string);
102 for(i=1;i<=nvar+npar;i++){ fscanf(par_fp,"%lf",&par[i]); if(i<=npar)printf("\n par[%d] = %g",i,par[i]); else if(i==npar+1)printf("\n\n y0[%d] = %g",i-npar,par[i]); else printf("\n y0[%d] = %g",i-npar,par[i]); fclose(par_fp); while(1){//big while loop printf("\n\n Enter integration time step [default: %g]",timestep); fgets(string,50,stdin); sscanf(string,"%lf",×tep); printf("\n\n Enter Integration steps per Jacobian map [default: %d]",ntst); fgets(string,50,stdin); sscanf(string,"%d",&ntst); if(jacob!= NULL){//analytic jacobian is available unless jacob = NULL printf("\n\n Use analytic Jacobian? (yes=1, no=0) [default: %d]",useaj); fgets(string,50,stdin); sscanf(string,"%d",&useaj); if(useaj!=0)useaj=1; else UseAJ=0; if(useaj==0){ printf("\n\n Enter offset for numerical Jacobian eval [default: %g]",doff); fgets(string,50,stdin); sscanf(string,"%lf",&doff); printf("\n\n Compute CLEs for subsystem? (yes=1, no=0) [default: %d]",computecle); fgets(string,50,stdin); sscanf(string,"%d",&computecle); if(computecle!=0)computecle=1; if(computecle==1){ printf("\n\n Sync method? (1=continuous coupling, 2=impulse coupling,"); printf("\n\n 3=fractional substitution, ) [default: %d]",syncmeth); fgets(string,50,stdin); sscanf(string,"%d",&syncmeth); //printf("\n\n Enter number of variables coupled [default: %d]",numcoup); //fgets(string,50,stdin); sscanf(string,"%d",&numcoup); //if(numcoup>nvar)numcoup=nvar; NumCoup=0; if(syncmeth==3)printf("\n\n Multiple substitutions are allowed:\n"); else printf("\n\n Multiple couplings are allowed:\n"); for(i=1;i<=nvar;i++){ if(syncmeth==3)printf("\n Substitute variable number %d? (yes=1, no=0)[default: %d]",i,coupvar[i]); else printf("\n Couple to variable number %d? (yes=1, no=0)[default: %d]",i,coupvar[i]); fgets(string,50,stdin); sscanf(string,"%d",&coupvar[i]); if(coupvar[i]!=0)coupvar[i]=1; if(coupvar[i])numcoup++; if(syncmeth==1){ printf("\n NOTE: For meth. 1 keep prod. of coupling str. and timestep less than 1.0"); 102
103 if(coupstren==0.0)coupstren=0.1/timestep; printf("\n\n Enter coupling strength [default: %g]",coupstren); fgets(string,50,stdin); sscanf(string,"%lf",&coupstren); printf("\n Coupling strength times timestep = %g",coupstren*timestep); if(syncmeth==2){ printf("\n\n Enter impulse period in timesteps (pos integer)[default: %d]",impper); fgets(string,50,stdin); sscanf(string,"%d",&impper); printf("\n Period = %g",impper*timestep); printf("\n For meth. 2, coupling str. has no limit, enter -1 for infinity"); printf("\n\n Enter impulse coupling strength [default: %g]",impstren); fgets(string,50,stdin); sscanf(string,"%lf",&impstren); if(impstren>0.0)coupfac=1.0-exp(- ImpStren*timestep*ImpPer); else coupfac= -ImpStren; printf("\n The corresponding displacement fraction is %g",coupfac); if(syncmeth==3){ printf("\n\n Enter Substitution Fraction between 0 and 1 [default: %g]",subfrac); fgets(string,50,stdin); sscanf(string,"%lf",&subfrac); if(subfrac>1.0)subfrac=1.0; if(subfrac<0.0)subfrac=0.0; if(syncmeth==3 && SubFrac==1.0) nvar1=nvar-numcoup;//nvar1 is the reduced number of variables in the response system when full substitution is used else nvar1=nvar; nvar2=nvar+nvar; else nvar1=nvar2=nvar; printf("\n\n Enter total number of mapping steps [default: %d]",nmap); fgets(string,50,stdin); sscanf(string,"%d",&nmap); printf("\n\n Enter number of mapping pre-steps [default: %d]",npre); fgets(string,50,stdin); sscanf(string,"%d",&npre); printf("\n\n Enter number iterative cycles (typically 4)"); printf("\n\n or 0 to use standard QR method only [default: %d]",ncyc); fgets(string,50,stdin); sscanf(string,"%d",&ncyc); printf("\n\n Enter printing period [default: %d]",prper); fgets(string,50,stdin); sscanf(string,"%d",&prper); printf("\n\n Change parameters or initial conditions? (yes=1, no=0) [default: %d]",chpar); fgets(string,50,stdin); sscanf(string,"%d",&chpar); if(chpar!=0)chpar=1; if(chpar==1){//change parameters and/or initial conditions from default values for(i=1;i<=npar;i++){ printf("\n\npar[%u]= [default: %g]",i,par[i]); 103
104 104 fgets(string,50,stdin); sscanf(string,"%lf",&par[i]); for(i=1;i<=nvar;i++){ printf("\n\ny%u(0)= [default: %g]",i,par[i+npar]); fgets(string,50,stdin); sscanf(string,"%lf",&par[i+npar]); if(ncyc>0)j=array3df(2*nmap,nvar1,nvar1);//storage for ALL jacobians and transposed jacobians when iterative QR method is used //set initial condition ///for(i=1;i<=nvar;i++)vstart[i]=v[i]=v[i+nvar2- nvar]=par[i+npar];//variables (drive and response) at start for(i=1;i<=nvar;i++)vstart[i]=v[i]=v[i+nvar]=par[i+npar];//variables (drive and response) at start //tstart=tt=0.0; tstart=tt=0; nvar3=0;//turn off "flag for unsynchronized CLEs" for 1st time thru loop below while(1){//medium sized while loop vrms=0.0; if(computecle){ printf("\n\n Conditional Lyapunov Exponents");//always do the standard method first even if iterative method is requested if(nvar3)printf("\n with drive and response free to desynchronize"); else printf("\n with drive and response synchronized"); else printf("\n\n Lyapunov Exponents");//always do the standard method first even if iterative method is requested printf("\n\n using the standard QR method:\n");//always do the standard method first even if iterative method is requested //initialize Q to unit matrix for(i=1;i<=nvar1;i++){ for(j=1;j<=nvar1;j++){ if(i==j)q[i][j]=1.0; else Q[i][j]=0.1;//slight offset from unit matrix to discourage numerical problems for(i=1;i<=nvar;i++)lyapsum[i]=0.0; for(imap=1;imap<=nmap+npre;imap++){ if(imap>npre){ //generate Jaco if(useaj==1){//when using analytic jacobian rather than calculating it numerically tt=tstart; ///for (i=1;i<=nvar;i++) v[i]=v[i+nvar2- nvar]=vstart[i]; for (i=1;i<=nvar+nvar3;i++) v[i]=vstart[i]; for (i=1;i<=nvar1*nvar1;i++){ //set up identity matrix in upper part of v[] if((i+nvar1)%(nvar1+1)==0)v[i+nvar+nvar3]=1.0; else v[i+nvar+nvar3]=0; for(itst=0;itst<ntst;itst++){
105 if(computecle==1 && SyncMeth==2 && tt%impper == 0)for(i=1;i<=nvar;i++)if(CoupVar[i]){ if(nvar3)v[i]+=coupfac*(v[nvar+i]-v[i]); for(j=1;j<=nvar1;j++)v[nvar+nvar3+(i- 1)*nvar1+j] *= (1.0-coupfac);//when coupfac -> 1 it obliterates all coupled rows in the Jacobian map rk4std(nvar+nvar3+nvar1*nvar1,tt*timestep,timestep,v,vout,k1,k2,k3,k 4,deri); for (i=1;i<=nvar+nvar3+nvar1*nvar1;i++) v[i]=vout[i]; //tt+=timestep; tt++; if(nvar3)for (i=1;i<=nvar;i++){ if(nvar==nvar1 CoupVar[i]==0)vrms+=pow(v[i]-v[i+nvar],2); i=i; //for (i=nvar+1;i<=nvar*(nvar+1);i++) Jaco[(i- 1)/nvar][1+(i-1)%nvar]=vout[i]; for(i=1;i<=nvar1;i++)for(j=1;j<=nvar1;j++) Jaco[i][j]=vout[nvar+nvar3+(i-1)*nvar1+j]; else {//find jacobian numerically j1=0;//index for nonsubstituted variables in method 3 for(j=1;j<=nvar;j++){ if(nvar==nvar1 CoupVar[j]==0){ j1++; tt=tstart; for(i=1;i<=nvar;i++) v[i]=vstart[i];//set initial values for map interval if(computecle)for(i=1;i<=nvar;i++) v[i+nvar]=vstart[i+nvar3];//set initial values for map interval for drive system v[j]+=doff; for(itst=0;itst<ntst;itst++){ if(computecle==1 && SyncMeth==2 && tt%impper == 0)for(i=1;i<=nvar;i++)if(CoupVar[i])v[i]+=coupfac*(v[nvar+i]- v[i]); rk4std(nvar2,tt*timestep,timestep,v,vout,k1,k2,k3,k4,deri); for (i=1;i<=nvar2;i++) v[i]=vout[i]; tt++; i1=0;//index for nonsubstituted variables for (i=1;i<=nvar;i++){ if(nvar==nvar1 CoupVar[i]==0){ i1++; Jaco[i1][j1]=vout[i]; tt=tstart; for(i=1;i<=nvar;i++) v[i]=vstart[i];//set initial values for map interval 105
106 if(computecle)for(i=1;i<=nvar;i++) v[i+nvar]=vstart[i+nvar3];//set initial values for map interval for drive system v[j]-=doff; for(itst=0;itst<ntst;itst++){ if(computecle==1 && SyncMeth==2 && tt%impper == 0)for(i=1;i<=nvar;i++)if(CoupVar[i])v[i]+=coupfac*(v[nvar+i]- v[i]); rk4std(nvar2,tt*timestep,timestep,v,vout,k1,k2,k3,k4,deri); for (i=1;i<=nvar2;i++) v[i]=vout[i]; tt++; i1=0;//index for nonsubstituted variables for (i=1;i<=nvar;i++){ if(nvar==nvar1 CoupVar[i]==0){ i1++; Jaco[i1][j1]=(Jaco[i1][j1]- vout[i])/(2*doff); //save current Jaco in J storage array if(ncyc>0)for(i=1;i<=nvar1;i++)for(j=1;j<=nvar1;j++){//when doing the iterative QR method J[imap-npre][i][j]=Jaco[i][j]; J[2*nmap-(imap-npre)+1][i][j]=Jaco[j][i]; //store transpose //right mult Jaco by Q -> A for(i=1;i<=nvar1;i++){ for(j=1;j<=nvar1;j++){ A[i][j]=0.0; for(k=1;k<=nvar1;k++) A[i][j] += Jaco[i][k]*Q[k][j]; //qr decomp A getting new Q and R qr(a,q,r,nvar1,cc,dd,sing); //take log of diag elements in R and add to lyap tally //divide lyap sum by time (excluding pretime) and print out if(imap%prper == 0)printf("\n time=%lf ",tt*timestep); for(i=1;i<=nvar1;i++){ lyapsum[i]+=log(r[i][i]); if(imap%prper == 0)printf("%g ",lyapsum[i]/(timestep*ntst*(imap-npre))); //move vstart forward one map step if(imap<=npre UseAJ==0){ tt=tstart; for (i=1;i<=nvar+nvar3;i++) v[i]=vstart[i]; for(itst=0;itst<ntst;itst++){ 106
107 107 if(nvar3){ if(computecle==1 && SyncMeth==2 && tt%impper == 0)for(i=1;i<=nvar;i++)if(CoupVar[i])v[i]+=coupfac*(v[nvar+i]-v[i]); rk4std(nvar+nvar3,tt*timestep,timestep,v,vout,k1,k2,k3,k4,deri); else rk4std(nvar,tt*timestep,timestep,v,vout,k1,k2,k3,k4,derivs); for (i=1;i<=nvar+nvar3;i++) v[i]=vout[i]; if(nvar3 && imap>npre){ for (i=1;i<=nvar;i++)if(nvar==nvar1 CoupVar[i]==0) vrms+=pow(v[i]-v[i+nvar],2); i=i;//test pt tt++; for (i=1;i<=nvar+nvar3;i++) vstart[i]=vout[i];//output provides next initial condition tstart=tt; /* //move vstart forward one map step tt=tstart; for (i=1;i<=nvar;i++) v[i]=v[i+nvar2-nvar]=vstart[i]; for(itst=0;itst<ntst;itst++){ //if(computecle==1 && SyncMeth==2 && tt%impper == 0)for(i=1;i<=NumCoup;i++)v[CoupVar[i]]+=(1.0-exp(- CoupStren*timestep*ImpPer))*(v[nvar+CoupVar[i]]-v[CoupVar[i]]); if(computecle==1 && SyncMeth==2 && tt%impper == 0)for(i=1;i<=nvar;i++)if(CoupVar[i])v[i]+=coupfac*(v[nvar+i]-v[i]); rk4std(nvar2,tt*timestep,timestep,v,vout,k1,k2,k3,k4,deri); for (i=1;i<=nvar2;i++) v[i]=vout[i]; tt++; for (i=1;i<=nvar;i++) vstart[i]=vout[i+nvar2-nvar];//output of drive system provides next initial condition tstart=tt; */ printf("\n"); if(ncyc>0)printf("\n\n Lyapunov exponents from iterative QR method:"); //initialize Q and Qi to unit matrix for(i=1;i<=nvar1;i++){ for(j=1;j<=nvar1;j++){ if(i==j)q[i][j]=qi[i][j]=1.0; else Q[i][j]=Qi[i][j]=0.0; for(icyc=1;icyc<=ncyc;icyc++){ for(i=1;i<=nvar1;i++)lyapsum[i]=0.0; for(imap=1;imap<=2*nmap;imap++){ //go through stored jacobians twice to make full Oseledec matrix //recover R or Jaco from J storage array for(i=1;i<=nvar1;i++)for(j=1;j<=nvar1;j++)r[i][j]=j[imap][i][j];
108 108 //else for(i=1;i<=nvar1;i++)for(j=1;j<=nvar1;j++)jaco[j][i]=j[2*nmapimap+1][i][j]; //right mult R or Jaco by Q -> A for(i=1;i<=nvar1;i++){ //printf("\n"); for(j=1;j<=nvar1;j++){ A[i][j]=0.0; for(k=1;k<=nvar1;k++) A[i][j] += R[i][k]*Q[k][j]; //printf("%lf ",Jaco[i][j]); //qr decomp A getting new Q and R qr(a,q,r,nvar1,cc,dd,sing); if(imap>2*nmap-3){ imap=imap;//test point for(i=1;i<=nvar1;i++)for(j=1;j<=nvar1;j++)j[imap][i][j]=r[i][j]; //store new R for(i=1;i<=nvar1;i++){ //lyapsum[i]+=log(fabs(r[i][i])); //use this version if QR decomp algo doesnt fix negatives on R diag lyapsum[i]+=log(r[i][i]); printf("\n\n cycle=%d ",icyc); for(i=1;i<=nvar1;i++)printf("%g ",lyapsum[i]/(timestep*ntst*(2*nmap))); printf("\n\n Residual Q matrix"); for(i=1;i<=nvar1;i++){ printf("\n"); for(j=1;j<=nvar1;j++){ printf("%g ",Q[i][j]); if(nvar3)printf("\n\n rms separation of drive and response= %g",sqrt(vrms/ntst/nmap)); printf("\n"); if(nvar3 ComputeCLE==0)break; //done printf("\n\n If any CLEs >= 0, enter small offset"); printf("\n\n to allow de-sync of drive and response"); printf("\n\n or enter 0 to end [default: %g]",voff); fgets(string,50,stdin); sscanf(string,"%lf",&voff); if(voff==0.0)break; nvar3=nvar;//turn on flag for unsynchronized CLEs for (i=1;i<=nvar;i++) vstart[i]=vstart[i+nvar]=vout[i]; for (i=1;i<=nvar;i++) vstart[i]+=voff; i=i;//test pt //end medium sized while loop if(ncyc>0)free3df(j); printf("\n r = repeat same model with changes"); printf("\n n = new model"); printf("\n q = quit");
109 109 //printf("\n\n Just press enter to accept default"); printf("\n\n Enter command [default: %s]",command); fgets(string,50,stdin); sscanf(string,"%s",&command); if(*command=='q') exit(0); if(*command=='n') break; //end big while loop free1df(par); free2df(a); free2df(q); free2df(qi); free2df(r); free2df(jaco); free2df(djac); free1df(v); free1df(vstart); free1df(ytemp); free1df(vout); free1df(cc); free1df(dd); free1df(lyapsum); free1if(sing); free1if(coupvar); free1df(k1); free1df(k2); free1df(k3); free1df(k4); void deri(double t,double y[],double dydt[]) { int i,j,k,i1,j1,k1; if(computecle==1 && SyncMeth==3 && (UseAJ==0 nvar3))for(i=1;i<=nvar;i++)if(coupvar[i]){ ytemp[i]=y[i];//save original values y[i]+=subfrac*(y[nvar+i]-y[i]);//sub in fractional shift towards drive system derivs(t,y,dydt); if(useaj>0)jacob(t,y); if(computecle==1 && SyncMeth==3 && (UseAJ==0 nvar3))for(i=1;i<=nvar;i++)if(coupvar[i])y[i]=ytemp[i];//replace original values in response system if(computecle==1 && (UseAJ==0 nvar3)){//drive system derivs(t,y+nvar,dydt+nvar); if(syncmeth==1)for(i=1;i<=nvar;i++)if(coupvar[i])dydt[i] += CoupStren*(y[nvar+i]-y[i]);//add coupling term to response system if(useaj>0){//when using analytic jacobian if(computecle==1){ if(syncmeth==3)for(j=1;j<=nvar;j++)if(coupvar[j])for(i=1;i<=nvar;i++ )djac[i][j] *= (1.0-SubFrac); if(syncmeth==1)for(i=1;i<=nvar;i++)if(coupvar[i])djac[i][i] -= CoupStren; //Left multiply the jacobian by differential jacobian.
110 110 //Jacobian up to current time is stored in upper part of y[] i1=0;//index for nonsubstituted variables in method 3 for(i=1;i<=nvar;i++)if(nvar==nvar1 CoupVar[i]==0){ i1++; j1=0; for(j=1;j<=nvar;j++)if(nvar==nvar1 CoupVar[j]==0){ j1++; dydt[nvar+nvar3+(i1-1)*nvar1+j1]=0.0; k1=0; for(k=1;k<=nvar;k++)if(nvar==nvar1 CoupVar[k]==0){ k1++; dydt[nvar+nvar3+(i1-1)*nvar1+j1] += djac[i][k]*y[nvar+nvar3+(k1-1)*nvar1+j1]; void rk4std(int ndim, double time,double step,double yin[],double yout[], double k1[],double k2[],double k3[],double k4[], void (*derivs)(double, double [], double [])) { int i; double halfstep,sixthstep; halfstep=step/2.0; sixthstep=step/6.0; (*derivs)(time,yin,k1); for (i=1;i<=ndim;i++) yout[i]=yin[i]+halfstep*k1[i]; (*derivs)(time+halfstep,yout,k2); for (i=1;i<=ndim;i++) yout[i]=yin[i]+halfstep*k2[i]; (*derivs)(time+halfstep,yout,k3); for (i=1;i<=ndim;i++) yout[i]=yin[i]+step*k3[i]; (*derivs)(time+step,yout,k4); for (i=1;i<=ndim;i++) yout[i]=yin[i]+sixthstep*(k1[i]+k4[i]+2.0*(k2[i]+k3[i])); double *array1df(long vals){ //1D array of doubles with for fortran style indexing (start with 1) double *a1; char string[50]; a1=(double *)malloc((size_t) ((vals+1)*sizeof(double))); if (!a1) {printf("\nfailure to allocate vals in array1df()");fgets(string,50,stdin);exit(1); return a1; double **array1dfp(long ptrs){ //1D array of pointers to doubles with fortran style indexing (start with 1) double **a1; char string[50]; a1=(double **)malloc((size_t) ((ptrs+1)*sizeof(double*)));
111 111 if (!a1) {printf("\nfailure to allocate vals in array1df()");fgets(string,50,stdin);exit(1); return a1; int *array1if(long vals){ //1D array of ints with fortran style indexing (start with 1) int *a1; char string[50]; a1=(int *)malloc((size_t) ((vals+1)*sizeof(int))); if (!a1) {printf("\nfailure to allocate vals in array1if()");fgets(string,50,stdin);exit(1); return a1; char *array1cf(long vals){ //1D array of chars with fortran style indexing (start with 1) char *a1; char string[50]; a1=(char *)malloc((size_t) ((vals+1)*sizeof(int))); if (!a1) {printf("\nfailure to allocate vals in array1cf()");fgets(string,50,stdin);exit(1); return a1; double **array2df(long ptrs,long vals){ //2D array of doubles with fortran style indexing (start with 1,1) long i; double **ar2; char string[50]; ar2=(double **) malloc((size_t)((ptrs+1)*sizeof(double*))); if (!ar2) {printf("\nfailure to allocate ptrs in array2df()");fgets(string,50,stdin);exit(1); ar2[1]=(double *) malloc((size_t)((ptrs*vals+1)*sizeof(double))); if (!ar2[1]) {printf("\nfailure to allocate vals in array2df()");fgets(string,50,stdin);exit(1); for(i=2;i<=ptrs;i++) ar2[i]=ar2[i-1]+vals; return ar2; double ***array3df(long ptrs3,long ptrs2,long vals){ //3D array of doubles with fortran style indexing (start with 1,1,1) long i,j; double ***ar3; char string[50]; ar3=(double ***) malloc((size_t)((ptrs3+1)*sizeof(double**))); if (!ar3) {printf("\nfailure to allocate ptrs to ptrs in array3df()");fgets(string,50,stdin);exit(1); ar3[1]=(double **) malloc((size_t)((ptrs3*ptrs2+1)*sizeof(double*))); if (!ar3[1]) {printf("\nfailure to allocate ptrs in array3df()");fgets(string,50,stdin);exit(1); ar3[1][1]=(double *) malloc((size_t)((ptrs3*ptrs2*vals+1)*sizeof(double))); if (!ar3[1][1]) {printf("\nfailure to allocate vals in array3df()");fgets(string,50,stdin);exit(1);
112 112 for(j=2;j<=ptrs2;j++)ar3[1][j]=ar3[1][j-1]+vals; for(i=2;i<=ptrs3;i++){ ar3[i]=ar3[i-1]+ptrs2; ar3[i][1]=ar3[i-1][1]+ptrs2*vals; for(j=2;j<=ptrs2;j++)ar3[i][j]=ar3[i][j-1]+vals; return ar3; void free1df(double *ar1){ //free 1D array of doubles with fortran style indexing (start with 1) free((char*) ar1); void free1dfp(double **ar1){ //free 1D array of doubles with fortran style indexing (start with 1) free((char*) ar1); void free1if(int *ar1){ //free 1D array of ints with fortran style indexing (start with 1) free((char*) ar1); void free1cf(char *ar1){ //free 1D array of chars with fortran style indexing (start with 1) free(ar1); void free2df(double **ar2){ //free 1D array of doubles with fortran style indexing (start with 1,1) free((char*) ar2[1]); free((char*) ar2); void free3df(double ***ar3){ //free 3D array of doubles with fortran style indexing (start with 1,1) free((char*) ar3[1][1]); free((char*) ar3[1]); free((char*) ar3); double *array1d(long vals){ //1D array of doubles with for C style indexing (start with 0, end with vals-1) double *a1; char string[50]; a1=(double *)malloc((size_t) ((vals)*sizeof(double))); if (!a1) {printf("\nfailure to allocate vals in array1d()");fgets(string,50,stdin);exit(1); return a1;
113 113 double **array2d(long ptrs,long vals){ //2D array of doubles with for C style indexing (start with 0,0, end with vals-1,vals-1) long i; double **ar2; char string[50]; ar2=(double **) malloc((size_t)((ptrs)*sizeof(double*))); if (!ar2) {printf("\nfailure to allocate ptrs in array2df()");fgets(string,50,stdin);exit(1); ar2[0]=(double *) malloc((size_t)((ptrs*vals)*sizeof(double))); if (!ar2[0]) {printf("\nfailure to allocate vals in array2df()");fgets(string,50,stdin);exit(1); for(i=1;i<ptrs;i++) ar2[i]=ar2[i-1]+vals; return ar2; void free1d(double *ar1){ //free 1D array of doubles with C style indexing (start with 0, end with vals-1) free((char*) ar1); void free2d(double **ar2){ //free 1D array of doubles with C style indexing (start with 0,0) free((char*) ar2[0]); free((char*) ar2); void matmult(int nvari, double **A, double **B, double **C){ //A = B * C int i,j,k; for(i=1;i<=nvari;i++){ for(j=1;j<=nvari;j++){ A[i][j]=0.0; for(k=1;k<=nvari;k++) A[i][j] += B[i][k]*C[k][j]; Έτσι, αφού τρέξουµε το πρόγραµµα εµφανίζεται αυτό το παράθυρο που αρχικά εµφανίζονται τα κύρια συστήµατα που περιέχονται στον αλγόριθµο. Έπειτα, εισάγουµε τον κωδικό για το επιθυµητό σύστηµα που στην περίπτωση µας είναι l για το σύστηµα Lorenz.

114 114 Έπειτα, εισάγουµε το βήµα ολοκλήρωσης και τα συνολικά βήµατα για την Ιακωβιανή απεικόνιση. εν επιλέγουµε την ανάλυση των Ιακωβιανών και εισάγουµε µία απόκλιση στον αριθµητικό τους υπολογισµό. εν χρειάζεται να υπολογίσουµε τους υπό συνθήκη εκθέτες Lyapunov στην παρούσα φάση. Επίσης, εισάγουµε τον συνολικό αριθµό των βηµάτων απεικόνισης και τον αριθµό των κύκλων επανάληψης. Έπειτα, εισάγουµε την περίοδο και αν θέλουµε να αλλάξουµε τις αρχικές συνθήκες του συστήµατος ή τις παραµέτρους του. Τέλος υπολογίζονται οι εκθέτες Lyapunov χρησιµοποιώντας την συνήθη QR µέθοδο.


115 Παρατηρούµε ότι οι εκθέτες Lyapunov είναι λ 1 = , λ 2 = και λ 3 = Επίσης, τρέξαµε και την επαναληπτική QR µέθοδο, και µας έδωσε πιο συγκεκριµένα αποτελέσµατα λ 1 = , λ 2 = και λ 3 = Τώρα, αν τρέξουµε πάλι το πρόγραµµα µε τις τιµές που βρήκε αριθµητικά ο Lorenz, θα καταλήξουµε στο συµπέρασµα ότι για r=24.06, το σύστηµα αρχίζει να φέρεται χαοτικά. 115

116 116 Άρα, παρατηρούµε ότι αυτός ο αλγόριθµος λειτουργεί κάπως καλύτερα για τους εκθέτες Lyapunov που είναι κοντά στο µηδέν Σύστηµα Rössler O ακόλουθος αλγόριθµος υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για το σύστηµα Rössler παίρνοντας σαν παραµέτρους στο εν λόγω σύστηµα a=0.15, b=0.20, c=10 σε γλώσσα C. Το πρόγραµµα που χρησιµοποιείται είναι το LyapOde (βλέπε ).
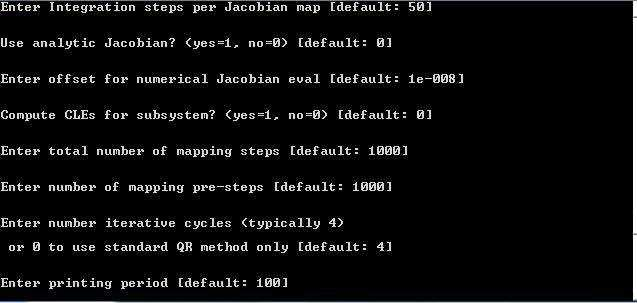


117 117

118 118 Παρατηρούµε ότι οι εκθέτες Lyapunov είναι λ 1 = , λ 2 = και λ 3 = Επίσης, τρέξαµε και την επαναληπτική QR µέθοδο, και µας έδωσε πιο συγκεκριµένα αποτελέσµατα λ 1 = , λ 2 = *10-5 και λ 3 = Για να δούµε πώς λειτουργεί ο αλγόριθµος για τους εκθέτες Lyapunov που βρίσκονται κοντά στο µηδέν, αρχικά παρατηρούµε ότι για a=b=0.1 και c=12.8 που το σύστηµα δεν είναι χαοτικό µε περίοδο 6 και γίνεται χαοτικό για c=13. Έτσι, για a=b=0.1 και c=12.79 το σύστηµα είναι µη χαοτικό, όπως βλέπουµε Όµως, για a=b=0.1 και c=12.8 που το σύστηµα έπρεπε να ήταν µη χαοτικό παρατηρούµε: Άρα, ούτε αυτός ο αλγόριθµος είναι ικανοποιητικός για τον υπολογισµό εκθετών Lyapunov που έχουν τιµή κοντά στο µηδέν.
119 Συνδυασµός των αλγορίθµων των Wolf et al. και των Eckmann και Ruelle Σύστηµα Lorenz Το ακόλουθο πρόγραµµα υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για το σύστηµα Lorenz παίρνοντας σαν παραµέτρους στο εν λόγω σύστηµα SIGMA = 10, R = 28, BETA = 8/3. Υπολογίζει τον εκθέτη Lyapunov χρησιµοποιώντας τους αλγόριθµους των Wolf και Eckmann και Ruelle µέσω του toolbox LET (Lyapunov Exponents Toolbox) στο Matlab. Το LET παρέχει ένα γραφικό interface για τους χρήστες για τον καθορισµό του ολικού συνόλου των εκθετών Lyapunov και της διάστασης συγκεκριµένων χαοτικών συστηµάτων. Οι παράµετροι ολοκλήρωσης που χρησιµοποιούνται είναι οι εξής: Η συνάρτηση ODE είναι το όνοµα του αρχείου.m που περιγράφει τις διαφορικές εξισώσεις του ενίοτε συστήµατος. Υπάρχουν έξι µέθοδοι ολοκλήρωσης για να διαλέξουν οι χρήστες. Η «διακριτή απεικόνιση» είναι για διακριτά συστήµατα ενώ οι άλλες είναι για συνεχή συστήµατα. Για συνεχή συστήµατα, οι χρήστες πρέπει να ορίσουν τον αρχικό χρόνο, το χρονικό βήµα, τον τελικό χρόνο, την σχετική ανοχή όπως και την απόλυτη ανοχή. Για διακριτά συστήµατα, ο αρχικός χρόνος πρέπει να είναι µηδέν και το βήµα ένα. Η προεπιλεγµένη σχετική και απόλυτη ανοχή είναι Η σχετική και απόλυτη ανοχή δεν είναι εφαρµόσιµες σε διακριτές απεικονίσεις, έτσι εµφανίζεται ένα µηδέν. Επιπλέον, για διακριτά συστήµατα, ο τελικός χρόνος πρέπει να είναι ακέραιος. Ο αριθµός των αρχικών συνθηκών πρέπει να είναι ίσος µε τον συνολικό αριθµό των µεταβλητών κατάστασης. Για να αποκτήσουµε τα σωστά αποτελέσµατα, οι χρήστες πρέπει να παρέχουν κατάλληλες αρχικές συνθήκες. Κάποιες αρχικές συνθήκες θα οδηγήσουν το σύστηµα σε ένα σταθερό σηµείο. Σε αυτήν την περίπτωση, ένας ή περισσότεροι εκθέτες Lyapunov θα µείνουν στις αρχικές τους τιµές και ποτέ δεν θα αλλάξουν, έτσι αυτό πρέπει να αποφευχθεί. ΣΗΜΕΙΩΣΗ: Σε µη αυτόνοµα συστήµατα, ένας από τους εκθέτες Lyapunov είναι πάντα µηδέν και σταθερός. Αυτό αναµένεται και δεν πρέπει να θεωρηθεί σαν την παραπάνω περίπτωση όσο οι άλλοι εκθέτες Lyapunov δεν είναι σταθεροί. Ο αριθµός των γραµµικοποιηµένων διαφορικών εξισώσεων είναι ίσος µε τον συνολικό αριθµό των στοιχείων του Ιακωβιανού πίνακα. Αφού ο Ιακωβιανός πίνακας είναι τετράγωνος, ο αριθµός πρέπει να είναι το τετράγωνο ενός ακεραίου. Αρχικά, εµφανίζεται το κυρίως µενού, όπου επιλέγουµε το πρόγραµµα που θα προσοµοιώσουµε και οι θεωρητικές πληροφορίες για αυτό. Επίσης, υπάρχουν επιλογές για demo όπου οι παράµετροι είναι σταθερές και για τρέξιµο προγράµµατος µε τις δικές µας παραµέτρους.

120 120 Σχήµα 1.70: Κεντρικό παράθυρο διαλόγου για το toolbox LET του Matlab Παρακάτω, εµφανίζεται το µενού των επιλογών που περιέχει όλα τα παραπάνω στοιχεία που αναλύσαµε.
121 121 Σχήµα 1.71: Παράθυρο επιλογής παραµέτρων Τέλος, παρουσιάζεται το διάγραµµα των εκθετών Lyapunov Σχήµα 1.72: Εκθέτες Lyapunov του συστήµατος Lorenz Παρατηρούµε ότι οι εκθέτες Lyapunov είναι λ 1 = , λ 2 = και λ 3 = και η διάσταση Lyapunov είναι Θα προσπαθήσουµε να χρησιµοποιήσουµε τις παραµέτρους του Lorenz όπως στους προηγούµενους αλγόριθµους. Έτσι αρχικά παρατηρούµε ότι για σ=10, b=8/3 και r=23.5, το σύστηµα περνά πολύ γρήγορα από την χαοτικότητα ή µη. Τελικά η τελευταία τιµή που το σύστηµα είναι µη χαοτικό είναι για r = 22.9.
122 Lyapunov Exponents Time Σύστηµα Rössler Σχήµα 1.73: Εκθέτες Lyapunov του συστήµατος Lorenz Το πρόγραµµα LET υπολογίζει τους ακόλουθους εκθέτες Lyapunov για το σύστηµα Rössler. Σχήµα 1.74: Κεντρικό παράθυρο διαλόγου για το toolbox LET του Matlab
123 123 Σχήµα 1.75: Παράθυρο επιλογής παραµέτρων Σχήµα 1.76: Εκθέτες Lyapunov για το σύστηµα Rössler
124 124 Έτσι, οι εκθέτες Lyapunov προκύπτουν λ 1 = , λ 2 = , λ 3 = και η διάσταση Lyapunov είναι Αν προσπαθήσουµε να τρέξουµε τον αλγόριθµο στο για a=b=0.1 και c=12.8, θα παρατητήσουµε ότι το σύστηµα παρόλο που δεν είναι χαοτικό, υπολογίζεται θετικός εκθέτης Lyapunov αν και είναι πολύ µικρός. Εποµένως, ακόµα και αυτός ο αλγόριθµος δεν είναι ικανοποιητικός για τον υπολογισµό των εκθετών Lyapunov που είναι κοντά στο µηδέν Υπολογισµός των εκθετών Lyapunov µε Μathematica Σύστηµα Lorenz Ο κώδικας που ακολουθεί υπολογίζει τον µέγιστο εκθέτη Lyapunov αρχικά και έπειτα το σύνολό τους.
125 125 Έτσι, ο µέγιστος εκθέτης Lyapunov είναι και οι άλλοι δύο είναι και Επίσης, το διάγραµµα είναι: Σχήµα 1.77: Εκθέτες Lyapunov για το σύστηµα Lorenz

126 Σύστηµα Rössler Ο κώδικας που ακολουθεί υπολογίζει τον µέγιστο εκθέτη Lyapunov αρχικά και έπειτα το σύνολό τους.
127 127 Έτσι, ο µέγιστος εκθέτης Lyapunov είναι και οι άλλοι δύο είναι και Επίσης, το διάγραµµα είναι: Σχήµα 1.79: Εκθέτες Lyapunov για το σύστηµα Rössler
128 Αλγόριθµος του Rosenstein Παρακάτω εµφανίζονται τα αποτελέσµατα του µέγιστου εκθέτη Lyapunov για διάφορα συστήµατα τρέχοντας τον αλγόριθµο του Rosenstein. Έτσι, παραθέτουµε αρχικά τις θεωρητικές τιµές του µέγιστου εκθέτη Lyapunov για τα συστήµατα στο σχήµα t(s) Θεωρητικό λ Σχήµα 1.80: Μέγιστοι εκθέτες Lyapunov για το σύστηµα Lorenz και Rössler Επίσης, παρουσιάζεται στο σχήµα 1.81, η γραφική αναπαράσταση του θεωρητικού µέγιστου εκθέτη Lyapunov και του αντίστοιχου πειραµατικού για το σύστηµα Lorenz. Σχήµα 1.81: Θεωρητική αναπαράσταση µέγιστου εκθέτη Lyapunov και αντίστοιχη πειραµατική για το σύστηµα Lorenz
129 129 Έπειτα, τρέχουµε τον αλγόριθµο για διάφορες τιµές της διάστασης εµβύθισης και παίρνουµε τα αποτελέσµατα στο σχήµα 1.82 και τις γραφικές παραστάσεις για το σύστηµα Lorenz(σχήµα 1.83) και Rössler(σχήµα 1.84). Παρατηρούµε ότι για m=1, το σφάλµα είναι ελάχιστο, αφού από την θεωρία γνωρίζουµε ότι ικανοποιητικά αποτελέσµατα, µπορούµε να πάρουµε την διάσταση εµβύθισης m το ελάχιστο ίση µε την διάσταση του συστήµατος, δηλαδή m n. Επίσης, παρατηρούµε ότι ο αλγόριθµος αυτός λειτουργεί πολύ καλά όταν το m είναι λιγότερο από αυτό που ορίζει το κριτήριο του Takens. Για m=1, δεν υπολογίζεται εκθέτης Lyapunov για κανένα από τα δύο συστήµατα, επειδή οι ανακατασκευασµένοι ελκυστές είναι έχουν µεγάλο θόρυβο σε µονοδιάστατο χώρο εµβύθισης. Εποµένως, φαίνεται ότι αν κάποιος διαλέξει την µικρότερη δυνατή διάσταση εµβύθισης, µπορεί να πετύχει την σύγκλιση του πειραµατικού αποτελέσµατος στο θεωρητικό. Ν J m Πειραµατικό λ % σφάλµα Σχήµα 1.82: Πειραµατικά αποτελέσµατα για διάφορες τιµές της διάστασης εµβύθισης. Ο αριθµός των δεδοµένων,ο χρόνος καθυστέρησης και η διάσταση εµβύθισης υποδηλώνονται ως Ν,J,m αντίστοιχα.
130 130 Σχήµα 1.83: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές της διάστασης εµβύθισης m σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Lorenz Σχήµα 1.84: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές της διάστασης εµβύθισης m σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Rössler Επιπρόσθετα, αναλύουµε την επίδοση του αλγόριθµου για χρονοσειρές διαφορετικού µήκους. Όπως φαίνεται στο σχήµα 1.85, 1.86 και 1.87, η παρούσα
131 131 µέθοδος λειτουργεί σωστά και για µικρό N. Επίσης, το σφάλµα είναι µικρό, εκτός από το σύστηµα Rössler που παρουσιάζεται απόκλιση 20-25% για Ν=3000 έως Ν J m Πειραµατικό λ % σφάλµα Σχήµα 1.85: Πειραµατικά αποτελέσµατα για διάφορες τιµές µήκους χρονοσειράς. Ο αριθµός των δεδοµένων,ο χρόνος καθυστέρησης και η διάσταση εµβύθισης υποδηλώνονται ως Ν,J,m αντίστοιχα. Σχήµα 1.86: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές του µήκους δεδοµένων J σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Lorenz
132 132 Σχήµα 1.87: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές του µήκους δεδοµένων J σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Rössler Επιπλέον, είναι σηµαντικό να τονίσουµε ότι είναι καθοριστικός ο προσδιορισµός του χρόνου καθυστέρησης στην ανακατασκευή του συστήµατος. Ο αλγόριθµος λειτουργεί καλά για τα δύο συστήµατα(σφάλµα<7%) µε όλους τους χρόνους(σχήµα 1.88,1.89,1.90), εκτός από τις ακραίες επιλογές (J=1,41 για το σύστηµα Lorenz και J=2,26 για του Rössler). Ν J m Πειραµατικό λ % σφάλµα Σχήµα 1.88: Πειραµατικά αποτελέσµατα για διάφορες τιµές του χρόνου καθυστέρησης. Ο αριθµός των δεδοµένων,ο χρόνος καθυστέρησης και η διάσταση εµβύθισης υποδηλώνονται ως Ν,J,m αντίστοιχα.
133 133 Σχήµα 1.89: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές του χρόνου καθυστέρησης J σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Lorenz Σχήµα 1.90: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές του χρόνου καθυστέρησης J σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Rössler
134 Ανακεφαλαίωση-Συµπεράσµατα Μετά από την παραπάνω θεωρητική ανάλυση και την πειραµατική διαδικασία, το βασικό συµπέρασµα είναι ότι είναι πολύ δύσκολο να υπολογιστούν οι εκθέτες Lyapunov χρησιµοποιώντας αλγόριθµους. Οι αλγόριθµοι που χρησιµοποιήσαµε δεν συγκλίνουν στο ίδιο αποτέλεσµα και εποµένως, εισάγονται αρκετά σφάλµατα στις αριθµητικές πράξεις, αλλά ακόµα και στις πράξεις των πινάκων ως προς την αντιστροφή τους και την διάσπαση QR. Έτσι, ανάλογα µε το πού τρέχει ο αλγόριθµος, δηλαδή Matlab, DevC++ ή Mathematica, αλλά ανάλογα και µε την πολυπλοκότητα του, εισάγεται διαφορετικό σφάλµα, µε αποτέλεσµα να αποκλίνουν οι υπολογιζόµενες τιµές από τις θεωρητικές. Όπως έχουµε αναφέρει παραπάνω, υπάρχουν δύο κύριες πηγές λάθους: η διακριτοποίηση των διαφορικών εξισώσεων και η αατικατάσταση στα όρια της συνεχούς µεταβλητής του χρόνου από µία ακολουθία χρονικών σηµείων. Επίσης, υπάρχουν σφάλµατα που εισάγονται από υπολογισµούς γραµµικής άλγεβρας, που θεωρούνται µέσα στα σφάλµατα διακριτοποίησης. Το κακό όµως για τους αλγόριθµους είναι ότι τα σφάλµατα αυτά συσσωρεύονται. Επιπρόσθετα, παρατηρήσαµε ότι υπάρχει διαφορά αποτελεσµάτων ανάµεσα στους συνεχείς QR αλγόριθµους και τους διακριτούς. Οι συνεχείς θεωρούνται ανώτεροι από τους διακριτούς αλγόριθµους, γιατί οι δεύτεροι υπολογίζουν µε κακή ακρίβεια τους αρνητικούς εκθέτες Lyapunov και απαιτούν µεγαλύτερο χρόνο στην CPU. Αντιθέτως, οι συνεχείς αλγόριθµοι δεν έχουν κάποιο πρόβληµα στον υπολογισµό των εκθετών Lyapunov και επιπλέον απαιτούν λιγότερα βήµατα και είναι λιγότερο ακριβοί. Επίσης, τα αποτελέσµατα αλλοιώνονται λόγω θορύβου που εισέρχεται στις µετρήσεις αλλά αυτό µπορεί να αποφευχθεί µε φίλτρα. Ο αριθµός των δεδοµένων παίζει επίσης, σηµαντικό ρόλο στην υλοποίηση των αλγορίθµων. Αν τα δεδοµένα είναι λίγα µπορεί να οδηγηθούµε σε τελείως διαφορετικά αποτελέσµατα από ό,τι πρέπει να καταλήξουµε. Εποµένως, για την σωστή εκτέλεση των αλγορίθµων απαιτούνται αρκετά δεδοµένα, όπως επίσης και ο χρόνος να είναι αρκετός. Όσον αφορά τους αλγόριθµους, τρέχοντας τον αλγόριθµο του Wolf για ένα τυχαίο σύστηµα, παίρνουµε το σχήµα 1.91 που παριστάνει την σύγκλιση του µονοδιάστατου και δισδιάστατου εκθέτη Lyapunov ως προς το αντίστροφο του χρόνου. Παρατηρούµε πολλές ταλαντώσεις που οδηγούνται από την χαοτική φύση του ελκυστή και δηµιουργούνται από την ύπαρξη θορύβου.

135 135 Σχήµα 1.91: Εκθέτες Lyapunov για τυχαίο σύστηµα Αντιθέτως, στο σχήµα 1.92 πάλι εµφανίζεται η σύγκλιση των εκθετών Lyapunov, αλλά χωρίς θόρυβο γιατί η πολύ µεγαλύτερη κάθετη κλίµακα κρύβει τις ταλαντώσεις. Σχήµα 1.92: Εκθέτες Lyapunov για τυχαίο σύστηµα Το ίδιο συµβαίνει και στους υπολογισµούς µε περισσότερο χρόνο, αλλά αυτό που έχει σηµασία είναι η πολύ αργή αριθµητική σύγκλιση για τον υπολογισµό των εκθετών Lyapunov(σχήµα 1.93).
136 136 Σχήµα 1.93: Εκθέτες Lyapunov για τυχαίο σύστηµα Εποµένως, το βασικό συµπέρασµα είναι ότι ο αλγόριθµος του Wolf et al. αποτυγχάνει να εκµεταλλευτεί όλα τα διαθέσιµα δεδοµένα, επειδή συγκεντρώνεται σε µία «συµβατική» τροχιά και αργεί στην σύγκλιση κατά την αύξηση του χρόνου. O αλγόριθµος των Eckmann-Ruelle είναι σθεναρός και υπολογίζει µε αρκετά καλή ακρίβεια τους θετικούς εκθέτες Lyapunov, αλλά οι αρνητικοί εκθέτες δεν υπολογίζονται αρκετά σωστά. Ο συνδυασµός των δύο αυτών αλγορίθµων προσπαθεί να ξεπεράσει αυτά τα προβλήµατα και όντως, δίνει καλύτερα αποτελέσµατα στις προσοµοιώσεις των συστηµάτων. Παρόλα αυτά, και οι δύο παραπάνω αλγόριθµοι παρουσιάζουν προβλήµατα αν ο αριθµός των δεδοµένων είναι µικρός. Τέλος, ο αλγόριθµος του Rosenstein θεωρείται αρκετά γρήγορος, είναι αξιόπιστος για µικρό εύρος δεδοµένων και εύκολος στην εφαρµογή του. Το µειονέκτηµά του είναι ότι υπολογίζει µόνο τον µέγιστο εκθέτη Lyapunov και εποµένως, δεν µας δίνει αναλυτική πληροφορία για την χαοτική συµπεριφορά του συστήµατος. Όλοι οι αλγόριθµοι παρουσιάζουν ευαισθησία στον θόρυβο (σχήµα 1.94,1.95) όπως επίσης και στον κατάλληλο προσδιορισµό της διάστασης εµβύθισης, του χρόνου καθυστέρησης και του χρόνου δειγµατοληψίας(σχήµα 1.96).
137 137 Σχήµα 1.94: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές του θορύβου σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Lorenz Σχήµα 1.95: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov για διάφορες τιµές του θορύβου σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Rössler
138 138 Σχήµα 1.96: Πειραµατική γραφική αναπαράσταση του µέγιστου εκθέτη Lyapunov σε σχέση µε την αντίστοιχη θεωρητική στο σύστηµα Lorenz χρησιµοποιώντας τρεις διαφορετικούς χρόνους δειγµατοληψίας. Περίπτωση 1: N = 5000, t = 0.01 s ( N t = 50 s),περίπτωση 2: N = 1000, t = 0.01 s ( N t = 10 s) και Περίπτωση 3: N = 1000, t = 0.05 s ( N t = 50 s) Παρόλα αυτά, παρατηρούµε ότι όλοι οι αλγόριθµοι αποκλίνουν άλλοι λίγο και άλλοι πολύ από τις θεωρητικές τιµές των εκθετών Lyapunov. Όπως, βλέπουµε τα καλύτερα αποτελέσµατα τα παίρνουµε από τον αλγόριθµο του Rosenstein, αλλά ολοκληρωτικά, δηλαδή σε σχέση µε όλους τους εκθέτες Lyapunov, οι αποδοτικότεροι αλγόριθµοι διαφέρουν σε κάθε σύστηµα. Έτσι, στο σύστηµα του Lorenz παρατηρούµε ότι τα καλύτερα αποτελέσµατα δίνονται από τον αλγόριθµο του Wolf (Μatlab) και τον συνδυασµό του µε τον αλγόριθµο των Eckmann-Ruelle(Matlab). Αντίθετα, για το σύστηµα Rössler, οι αλγόριθµοι που δίνουν ικανοποιητικά αποτελέσµατα είναι πάλι ο αλγόριθµος του Wolf(Matlab) και ο αλγόριθµος των Eckmann-Ruelle(DevC++). Ο αλγόριθµος του Wolf που τρέξαµε στο Mathematica, δίνει ικανοποιητικό αποτέλεσµα µόνο για τον µέγιστο εκθέτη Lyapunov, ενώ για τους υπόλοιπους υπάρχει κακή ακρίβεια. Όσον αφορά την εκτέλεση των αλγόριθµων για τιµές των παραµέτρων των συστηµάτων για τις οποίες κάποιος από τους εκθέτες Lyapunov είναι κοντά στο µηδέν, που θεωρείται σηµαντικό θέµα γιατί από εκεί συµπεραίνουµε την χαοτικότητα του συστήµατος, παρουσιάζονται πολλές δυσκολίες και επιπλοκές. Καταρχάς, ο αλγόριθµος του Wolf και στο Matlab αλλά και στο Mathematica δεν λειτουργεί καλά σε αυτές τις περιπτώσεις. Ενώ θεωρητικά το σύστηµα Lorenz για r=24 γίνεται χαοτικό, µε τον αλγόριθµο του Wolf, αυτό συµβαίνει για r=24.74 που το σύστηµα αρχίζει σαν χαοτικό αλλά µετά γίνεται µη χαοτικό. Με τον αλγόριθµο των Eckmann- Ruelle στο DevC++, αυτό το πετυχαίνουµε µε µικρή απόκλιση. Το ίδιο συµβαίνει και
139 139 στον συνδυασµένο αλγόριθµο των Wolf και Eckmann-Ruelle. Εποµένως, για την κρίσιµη τιµή του εκθέτη Lyapunov που είναι κοντά στο 0, οι αλγόριθµοι δεν είναι απολύτως ικανοποιητικοί στην εκτέλεση. Άρα, τα βασικά συµπεράσµατα είναι ότι οι εκθέτες Lyapunov, οι οποίοι αποτελούν σηµαντικά κριτήρια χαοτικότητας, υπολογίζονται πολύ δύσκολα µέσω σθεναρών αλγορίθµων, αλλά επίσης πολύπλοκων και χρονοβόρων. Εποµένως, πρέπει να είµαστε πολύ προσεχτικοί στην επιλογή των παραµέτρων των αλγορίθµων, αλλά ακόµα και στην επιλογή του εκάστοτε αλγορίθµου, ώστε να συµπεράνουµε σωστά και ακριβή αποτελέσµατα και να µην οδηγούµαστε σε λανθασµένα συµπεράσµατα, λόγω των σφαλµάτων που υπεισέρχονται στους υπολογισµούς. ΚΕΦΑΛΑΙΟ 5 ΠΑΡΑΡΤΗΜΑΤΑ 5.1 Εισαγωγή Σε αυτό το κεφάλαιο θα παρουσιάσουµε τους κώδικες που χρησιµοποιούµε στις διάφορες πλατφόρµες και που δεν χρειάζονται για τον υπολογισµό των εκθετών Lyapunov. 5.2 Προγράµµατα στο Matlab Ελκυστής Lorenz Παρατίθεται ο κώδικας στο Simulink για τον σχεδιασµό του χαοτικού ελκυστή: The Lorenz System 10 *(u(2)-u(1)) xdot 28 *u(1)-u(2)-u(1)*u(3) 1 s mu ydot Mux Integrator Demux XY Graph 1 u(1)*u(2)-(8/3)*u(3) Out 1 zdot
140 Ελκυστής του Hénon Παρατίθεται ο κώδικας στο Matlab για τον σχεδιασµό του χαοτικού ελκυστή: a=1.2; b=0.4; N=6000; x=zeros(1,n); y=zeros(1,n); x(1)=0.1; y(1)=0; for n=1:n x(n+1)=1+y(n)-a*(x(n))^2; y(n+1)=b*x(n); end axis([ ]) plot(x(50:n),y(50:n),'.','markersize',1); fsize=15; set(gca,'xtick',-1:0.5:1,'fontsize',fsize) set(gca,'ytick',-1:0.5:2,'fontsize',fsize) xlabel('\itx','fontsize',fsize) ylabel('\ity','fontsize',fsize) Ελκυστής της απεικόνισης Ikeda Παρατίθεται ο κώδικας στο Matlab για τον σχεδιασµό του χαοτικού ελκυστή: clear echo off A=10; B=0.15; N=10000; E=zeros(1,N);x=zeros(1,N);y=zeros(1,N); E(1)=A;x(1)=A;y(1)=0; for n=1:n E(n+1)=A+B*E(n)*exp(1i*abs(E(n))^2); x(n+1)=real(e(n+1)); y(n+1)=imag(e(n+1)); end axis([ ]) axis equal plot(x(50:n),y(50:n),'.','markersize',1); fsize=15; set(gca,'xtick',8:1:12,'fontsize',fsize) set(gca,'ytick',-2:1:2,'fontsize',fsize) xlabel('real E','FontSize',fsize) ylabel('imag E','FontSize',fsize)
141 Ελκυστής νευρωνικού δικτύου Παρατίθεται ο κώδικας στο Matlab για τον σχεδιασµό του χαοτικού ελκυστή ενός νευρωνικού δικτύου: clear b1=-2;b2=3;w11=-20;w21=-6;w12=6;a=1; N=7000; x(1)=0; y(1)=2; x=zeros(1,n);y=zeros(1,n); for n=1:n x(n+1)=b1+w11*1/(1+exp(-a*x(n)))+w12*1/(1+exp(-a*y(n))); y(n+1)=b2+w21*1/(1+exp(-a*x(n))); end hold on axis([ ]) plot(x(50:n),y(50:n),'.','markersize',1); fsize=15; set(gca,'xtick',-15:5:5,'fontsize',fsize) set(gca,'ytick',-5:5:5,'fontsize',fsize) xlabel('\itx','fontsize',fsize) ylabel('\ity','fontsize',fsize) hold off 5 y x
142 Εκθέτες Lyapunov της λογιστικής απεικόνισης a)το παρακάτω πρόγραµµα υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov της λογιστικής απεικόνισης για λ=[2.5,4]. x0 = 0.5; alpha=[2.4:0.001:4]; OutLog = 200; % 100< - <300 OutLyap = 7000; % 500< - <10000 for i=1:size(alpha,2) x = x0; alpha(i); for j=1:outlog x = alpha(i)*x*(1-x); end sum(i) = 0; for j=1:outlyap x = alpha(i)*x*(1-x); sum(i) = sum(i) + log(abs(alpha(i)-2*alpha(i)*x)); end sum(i) = sum(i)/outlyap; end LL=length(alpha); zero=zeros(1,ll); figure; text(2.6,.65,... texlabel('lambda>0: Chaotic')); hold on; text(2.6,.5,... texlabel('lambda(x_0)=(1/n) lim [ Sigma_0^(n-1)log f^,(x_i) ]')); hold on; text(2.6,-0.7,... texlabel('lambda<0: Deterministic ')); plot(alpha,sum,'b',alpha,zero,'r'); title('lyapunov exponent of Logistic map'); xlabel(' 2.5 \leq \alpha \leq 4'); ylabel('lce') axis([ ]); grid; b) Το ακόλουθο πρόγραµµα υπολογίζει τον εκθέτη Lyapunov για λ=4. % Lyapunov exponent when λ=4 clear; mu=4; x=0.1;xo=x; itermax=49999; for n=1:itermax xn=mu*xo*(1-xo); x=[x xn];
 στο")
143 143 end xo=xn; Liap_exp=vpa(sum(log(abs(mu*(1-2*x))))/itermax,6) c) Το ακόλουθο πρόγραµµα υπολογίζει τον εκθέτη Lyapunov χρησιµοποιώντας τους αλγόριθµους των Wolf και Eckmann και Ruelle µέσω του toolbox LET (Lyapunov Exponents Toolbox) στο Matlab.
144 144 Παρατηρούµε ότι οι παράµετροι της λογιστικής απεικόνισης είναι a=b=4, και ο εκθέτης Lyapunov είναι και η διάσταση Lyapunov δεν ορίζεται για πρώτης τάξης σύστηµα Εκθέτες Lyapunov της απεικόνισης Hénon Το παρακάτω πρόγραµµα υπολογίζει τους εκθέτες Lyapunov της απεικόνισης Hénon µε παραµέτρους a=1.2,b=0.4: % Computing the Lyapunov Exponents of the Henon map. itermax=500;
145 145 a=1.2;b=0.4;x=0;y=0; vec1=[1;0];vec2=[0;1]; for i=1:itermax x1=1-a*x^2+y;y1=b*x; x=x1;y=y1; J=[-2*a*x 1;b 0]; vec1=j*vec1; vec2=j*vec2; dotprod1=dot(vec1,vec1); dotprod2=dot(vec1,vec2); vec2=vec2-(dotprod2/dotprod1)*vec1; lengthv1=sqrt(dotprod1); area=vec1(1)*vec2(2)-vec1(2)*vec2(1); h1=log(lengthv1)/i; h2=log(area)/i-h1; end fprintf('h1= %12.10f\n',h1) fprintf('h2= %12.10f\n',h2) Εκθέτες Lyapunov µη ισοθερµικής συνάρτησης Το παρακάτω πρόγραµµα υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov της µη ισοθερµικής συνάρτησης. Το κυρίως πρόγραµµα είναι ],10); plot(t,res); title('dynamics of Lyapunov exponents'); xlabel('time'); ylabel('lyapunov exponents'); Έπειτα, ακολουθεί η συνάρτηση για τον ορισµό του µη ισοθερµικού συστήµατος. Το πρόγραµµα για τον υπολογισµό των εκθετών βρίσκεται στην παράγραφο function f=nonisothermal_ext(t,x) % Values of parameters % Kappa = 10^-3; Gamma = 0.05; Delta = 0.025; Mu= 0.498; % Periodic Kappa = 10^-3; Gamma = 0.05; Delta = 0.025; Mu= ; % chaotic x=x(1); y=x(2); z=x(3); Y= [X(4), X(7), X(10); X(5), X(8), X(11); X(6), X(9), X(12)]; f=zeros(9,1); %rosler equation f(1)=mu*exp(delta*z) - x*y^2 - Kappa*x; f(2)=x*y^2 + Kappa*x - y; f(3)=y - Gamma*z; %Linearized system Jac=[-y^2-Kappa, -2*x*y, exp(z*delta)*delta*mu; y^2+kappa, *x*y, 0; 0, 1, -Gamma]; %Variational equation f(4:12)=jac*y; %Output data must be a column vector
146 146 1 Dynamics of Lyapunov exponents 0-1 Lyapunov exponents Time Έτσι, οι εκθέτες Lyapunov προκύπτουν από το Matlab για t= , λ 1 = , λ 2 = , λ 3 = Επίσης, ο αντίσοιχος κώδικας στο Mathematica είναι:
147 Έτσι, ο µέγιστος εκθέτης Lyapunov υπολογίζεται και οι άλλοι δύο είναι και Eπίσης, το διάγραµµα εµφανίζεται παρακάτω: 147
148 Εκθέτες Lyapunov του µοντέλου Stewart-McCumber Το ακόλουθο πρόγραµµα υπολογίζει τον εκθέτη Lyapunov χρησιµοποιώντας τους αλγόριθµους των Wolf και Eckmann και Ruelle µέσω του toolbox LET (Lyapunov Exponents Toolbox) στο Matlab.

149 Έτσι, οι εκθέτες Lyapunov προκύπτουν από το Matlab λ 1 = , λ 2 =0, λ 3 = και η διάσταση Lyapunov είναι
150 ιάγραµµα διακλάδωσης, αυτοσυσχέτιση κτλ λογιστικής απεικόνισης Το παρακάτω πρόγραµµα εµφανίζει το διάγραµµα διακλάδωσης για συγκεκριµένη τιµή του λ, την εικόνα µίας τροχιάς για δεδοµένο λ και µία επιλογή αρχικού σηµείου και τέλος, δηµιουργεί ένα γράφηµα της κατανοµής των σηµείων στην ίδια τροχιά και υπολογίζει την συνάρτηση αυτοσυσχέτισης. Όσον αφορά την δηµιουργία του διαγράµµατος διακλάδωσης, εισάγουµε την επιλογή 1 και έπειτα, ορίζουµε το διάστηµα του λ=[3,4] ή κάτι άλλο. Για τον υπολογισµό των εκθετών Lyapunov, έχουµε την επιλογή 2 και εµφανίζεται το ίδιο µε την παράγραφο Επίσης, για την εικόνα της τροχιάς, έχουµε την επιλογή 3, διαλέγουµε το λ που στην περίπτωσή µας είναι default 3.7, και επιλέγουµε και το αρχικό σηµείο της τροχιάς µε την rand, εποµένως καταλήγουµε στο τυχαίο σηµείο x= Τέλος, για την δηµιουργία της συνάρτησης κατανοµής και της αυτοσυσχέτισης, επιλέγουµε το default λ και το τυχαίο αρχικό σηµείο. clear, close; n1=400; %% no of lattice points in coordinate and parameter k1 n2=200; %% no of iterations to reach attractor n3=400; %% no of iterations for bifurcation diagram n4=5000; %% no of iterations for distribution and Lyapunov exponent k1=[]; kk=[]; q1=[]; while q0==1; help logi, q1 = input('> Now input the number corresponding to you choice >>> '); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% while q1==1; disp('> (1) Drawing a bifurcation diagram...'); if isempty(kk) %> setting default kk=[3 4]; end disp('> The k1-interval is set = '); disp(kk); q3=input('> CHOOSE another k1-interval [a b] or <return> >>> '); q=isempty(q3); if q==0 disp('> The k1-interval is set = '); disp(q3); kk = q3; end disp('> The calculations could take a few seconds... '); k0=linspace(kk(1), kk(2),n1)'; % seed=rand(1); seed=.5; x1=seed; ww=[]; for iter1=1:n2 %% this is just to reach the attractor x1=k0.*x1.*(1-x1); end for it3=1:n3 %% points on the attractor, we hope
151 151 x1=k0.*x1.*(1-x1); ww=[ww, x1]; end figure(clf) plot(k0,ww, '. k','markersize',4); title('bifurcation diagram for logistic map'); xlabel('parameter lambda'); ylabel('coordinate X'); % axis([ kk(1) kk(2) 0 1]); axis tight; disp('> CHOOSE: Repeat = 1, Back = 2, Continue = 3 '), rr = input('> Input the number corresponding to you choice >>> '); if isempty(rr) rr=2; end if rr==1 q1=1; elseif rr==2 q0=1; q1=0; else q1=2; end close; end %%% of q1==1 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% while q1==2; % disp('> (2) Calculating the Lyapunov exponents...'); disp('> The number of iterations is set at = '); disp(n4); if isempty(kk) %> setting default kk=[3 4]; end disp('> The k1-interval is set = '); disp(kk); q3=input('> CHOOSE another k1-interval [a b] or <return> >>> '); q=isempty(q3); if q==0 disp('> The k1-interval is set = '); disp(q3); kk = q3; end % We pick a lattice of n1 values of the parameter k1 k0=linspace(kk(1), kk(2),n1)'; % We start the iteration at a random point seed=rand(1);x1=seed; disp(' > Wait a mo...'), % The first part of the iteration is discarded - % this is just to reach the attractor for it2=1:n1 % x1=k0.*x1.*(1-x1); end % Now we generate a sequence of approximations to the Lyapunov exponent % as a function of the vector k0! aa=log(abs(1-2*x1)); for it3=1:n4 %%
152 x1=k0.*x1.*(1-x1); y1=log(abs(1-2*x1)); aa=(y1+it3*aa)/(1+it3); end aa = aa + log(k0+eps); % adding a term coming from the k0 factor plot(k0,[aa/log(2), zeros(size(k0))]); axis([kk(1) kk(2) -1 1]), title('normalized Lyapunov exponent as a function of \lambda'); disp('> CHOOSE: Repeat = 1, Back = 2 '), rr = input('> Input the number corresponding to you choice >>> '); if isempty(rr) rr=2; end if rr==1 q1=2; else rr==2 q1=1; end close; end %% of q1==2 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% while q1==3; %home, disp('> Drawing a cobweb picture...'); k1= input('> CHOOSE k1 in [3,4], default 3.7 >>> '); if isempty(k1) k1=3.7; end disp('> Choose starting point, e.g. as rand(1)'); x1=input('> CHOOSE starting point 0 < x1 < 1 >>> '); if isempty(x1); x1=rand(1); end disp('> The starting point = '); disp(x1); ww=[]; disp('> Wait a mo... '), figure(gcf), xx=linspace(0,1,n1); yy=k1*xx.*(1-xx); plot(xx,yy, xx, xx); axis([ ]); hold on; for iter2=1:30 %% 4 y1=k1*x1*(1-x1); line([x1 x1],[x1 y1]); l1=plot(x1,y1,'r o'); title('orbit of the chosen initial point'); xlabel(' Coordinate X '), ylabel(' Iterate F[X] '), pause(.3) line([x1 y1],[y1 y1]); ww=[ww;[x1 y1] ; [y1 y1]]; x1=y1; delete(l1); end % of iteration hold off 152
153 153 disp('> CHOOSE: Repeat = 1, Back = 2, Continue = 3 '), rr = input('> Input the number corresponding to you choice >>> '); if isempty(rr) rr=2; end if rr==1 q1=3; elseif rr==2 q0=1; q1=1; else q1=4; end close; end % of q1==3 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% while q1==4 disp('> Calculating distribution and autocorrelation function...') if isempty(k1) %> setting default k1=3.7; end disp('> The value of the parameter k1 is set = '); disp(k1); q3=input('> CHOOSE another k1, or do a <return> >>> '); if isempty(q3) k1, else k1 = q3, end x1=rand(1), % > random starting point in [0,1] w1=[]; % > start on vector containing an orbit % The iterations may take some time... disp('> This may take some time...'), % > The first n2 points which are discarded for it1=1:n2 %% 4 y1=k1*x1*(1-x1); x1=y1; end % > Then generate an orbit of n4 points, and keep the vector for iter3=1:n4 %% y1=k1*x1*(1-x1); w1=[w1;y1]; x1=y1; end ww= linspace(0,.99,100); figure(1), hist(w1,ww); title('density of the orbit points on [0,1]'); disp('> Wait a mo...'), % > Generate a sequence of symbols of 0's and 1's % > 0 = point in 0 <= x <.5, 1 = point in.5 <= x <= 1 w3=round(w1); av1=mean(w3) % > the average var1 = cov(w3); % > the variance var2=var1; ww=w3; for iter4=1:n2 ww=[ww(n4);ww(1:n4-1)]; zz=cov(w3,ww); var2=[var2;zz(1,2)]; end
154 154 var2=var2/var1; figure(2), bar(var2); title('autocorrelation function for the symbolic sequence'); axis([0 n2-1 1]); disp('> CHOOSE: Repeat = 1, Back = 2, Close = 3 '), rr = input('> Input the number corresponding to you choice >>> '); if isempty(rr) rr=2; end if rr==1 q1=4; elseif rr==2 q0=1; q1=0; else q0=0; q1=0; end close; close; end if q1 > 4 q0 = 0; end end % of q0==1 disp('> Closing <logi.m>!'); clear, close all; Μορφοκλασµατικά σχέδια Lyapunov Το παρακάτω πρόγραµµα σχεδιάζει τα µορφοκλασµατικά σχέδια Lyapunov για διαφορετικές ακολουθίες. seq_list = {'[ ]' ;'[ ]';... '[ ]';; [s,v] = listdlg('promptstring','select sequence:',... 'SelectionMode','single',... 'ListString',seq_list); if v==1 seq=str2num(seq_list{s); hell = []; N = 150; for rough=1:90 hell=[hell seq]; %repeat the sequence end seq = hell(1:n); clear hell seq_len = length(seq); lambda = 0; a = linspace(3,4,500); %image plane b = linspace(3,4,500); %image plane a0 = 0; b0 = 0;
155 155 r = 0; x = 0; sum_log = 0; rough = 0; rough1 = 0; lena = length(a); lenb = length(b); zval = zeros(lena,lenb); c = zeros(lena,lenb); for n=1:lena c(n,:) = b(n)+i*a(:); end total =lena*lenb; prod_deriv = 0; tic h_msg = msgbox(' Please Wait ',' '); for m=1:total x=0.5; b0=imag(c(m)); a0=real(c(m)); for rough=1:seq_len if seq(rough)==1 r=a0; else r=b0; end x=1*r*x*(1-x); end sum_log=0; prod_deriv = 1; rough=1; while ((rough<=n)&&(prod_deriv<200)) if seq(rough)==1 r=a0; else r=b0; end x = r*x*(1-x); prod_deriv =prod_deriv*r*(1-2*x); sum_log=sum_log+log( abs(prod_deriv)); rough=rough+1; end lambda = sum_log / N; zval(m)=10+abs(lambda); end toc close(h_msg); cmap=fliplr(colormap(hot)); colormap(cmap); h=imagesc(b,a,zval); end
156 156 Σε αυτό πρόγραµµα παρατηρούµε ένα µειονέκτηµα, που είναι ο µεγάλος χρόνος για την παραγωγή των διαγραµµάτων. Έτσι, για το πρώτο διάγραµµα, χρειάστηκαν sec, ενώ για τα άλλα και sec αντίστοιχα. 5.3 Προγράµµατα σε γλώσσα C Εύρεση ελκυστή χρησιµοποιώντας εκθέτες Lyapunov O εκθέτης Lyapunov υπολογίζεται από την σχέση Θεωρούµε δύο κοντινά σηµεία σε χρόνο βήµατος n, x(n) και x(n)+dx(n). Στο επόµενο χρόνο βήµατος θα έχουν αποκλίνει στα x(n+1) και x(n+1)+dx(n+1). Ο εκθέτης Lyapunov(παραδοσιακά ορισµένος σαν lamda) εκφράζει τον µέσο ρυθµό σύγκλισης ή απόκλισης. Ο εκθέτης µας λέει τον ρυθµό µε τον οποίο χάνουµε πληροφορία για τις αρχικές συνθήκες. Έτσι, όταν lamda>0, το σύστηµα είναι χαοτικό. Το µέγεθος του lamda µας λέει πόσο ευαίσθητο σε αρχικές συνθήκες είναι το σύστηµα. Για παράδειγµα, χαοτικά συστήµατα µε lamda πολύ κοντά στο µηδέν από το πρόγραµµα θεωρούνται ευσταθή(όπου το lamda είναι µικρότερο από 10-4 ). Όταν το lamda=0, το σύστηµα είναι ευσταθές. Τέλος, όταν το lamda<0, το σύστηµα έλκεται είτε σε µία ευσταθή περιοδική τροχιά ή σε ένα σταθερό σηµείο. Το συγκεκριµένο πρόγραµµα αντιλαµβάνεται την διαφορά ανάµεσα στα σταθερά σηµεία και στους περιοδικούς ελκυστές. #include <stdio.h> #include <stdlib.h> #include <math.h> #include <time.h> #include <string.h> #if defined(win32) #include <float.h> #define isnan #define isinf #define fmin #define fmax #define srand48 #define drand48() #endif _isnan!_finite min max srand ((double)rand()/(double)rand_max) #if!defined(true) #define TRUE 1 #endif #if!defined(false) #define FALSE 0 #endif
157 157 /* points per attractor */ int MAXITERATIONS = ; /* after LYAPCHECK iterations, an early check of the lyap exponent is done to see if we can bail */ int LYAPCHECK = 10000; /* after this number of iterations, the attractor is considered "settled" and we start computing lyapunov exponents. */ int LYAPSETTLE = 1000; /* the max number of tries to find chaotic attractors */ int NEXAMPLES = 10000; /* after TARGET chaotic attractors are found, we quit. */ int TARGET = 10; double *x,*y,*z; int SaveAttractor(int,double *,double); int main(int argc,char **argv) { double ax[5]; long i,n; int drawit; int found=0; long secs, secs2; double d0,dd,dx,dy,dz,lyapunov; double xe,ye,ze,xenew=0,yenew=0,zenew=0; int inf=0,pnt=0,stb=0,per=0,cha=0; x = calloc( MAXITERATIONS+1, sizeof(double) ); y = calloc( MAXITERATIONS+1, sizeof(double) ); z = calloc( MAXITERATIONS+1, sizeof(double) ); time( &secs ); srand48( secs ); for( n=0; n<nexamples; n++ ) { */ /* Initialize things */ for( i=0; i<5; i++ ) { ax[i] = 6.0 * (drand48() - 0.5); /* range of initial values: +- 3 lyapunov = 0.0; /* Calculate the attractor */ drawit = TRUE; /* start at a random point from */ x[0] = drand48() - 0.5; y[0] = drand48() - 0.5; z[0] = drand48() - 0.5; /* set up a x+epsilon point for lyaping */ xe = x[0] + (drand48() - 0.5) / ; ye = y[0] + (drand48() - 0.5) / ; ze = y[0] + (drand48() - 0.5) / ; /* compute the deltas */ dx = x[0] - xe;
158 158 dy = y[0] - ye; dz = z[0] - ze; d0 = sqrt( dx*dx + dy*dy + dz*dz ); for( i=1; i<maxiterations; i++ ) { /* Calculate next term */ x[i] = sin( ax[0]*y[i-1] ) - z[i-1]*cos( ax[1]*x[i-1] ); y[i] = z[i-1]*sin( ax[2]*x[i-1] ) - cos( ax[3]*y[i-1] ); z[i] = ax[4]*sin( x[i-1] ); xenew = sin( ax[0]*ye ) - ze*cos( ax[1]*xe ); yenew = ze*sin( ax[2]*xe ) - cos( ax[3]*ye ); zenew = ax[4]*sin( xe ); /* Does the series tend to infinity? */ if( x[i] < -1e10 y[i] < -1e10 z[i] < -1e10 x[i] > 1e10 y[i] > 1e10 z[i] > 1e10 ) { drawit = FALSE; inf++; break; /* Does the series tend to a point? */ if( fabs( x[i] - x[i-1] ) < 1e-10 && fabs( y[i] - y[i-1] ) < 1e-10 && fabs( z[i] - z[i-1] ) < 1e-10 ) { drawit = FALSE; pnt++; break; /* Calculate the lyapunov exponents after settling */ if( i > LYAPSETTLE ) { dx = x[i] - xenew; dy = y[i] - yenew; dz = z[i] - zenew; dd = sqrt( dx*dx + dy*dy + dz*dz ); lyapunov += log(fabs(dd / d0)); /* readjust the x+dx in the direction of the current iter to be within epsilon (d0) of x (and so on for each coordinate) */ xe = x[i] + d0 * dx / dd; ye = y[i] + d0 * dy / dd; ze = z[i] + d0 * dz / dd; /* at some point, see if we can bail out early. */ if( LYAPCHECK == i ) { if( fabs(lyapunov)/i < 1e-4 lyapunov < 0.0 ) break;
159 159 lyapunov /= i; /* Classify the series according to lyapunov */ if (drawit) { printf("%8d ",n); if (fabs(lyapunov) < 1e-4) { printf("stable "); stb++; drawit = FALSE; else if (lyapunov < 0.0) { printf("periodic %g ",lyapunov); per++; drawit = FALSE; else { cha++; printf("chaotic %g ",lyapunov); printf("\n"); /* Save the image */ if (drawit) { SaveAttractor(n,ax,lyapunov); found++; if( found == TARGET ) break; time(&secs2); printf("results (%d seconds)\n",secs2-secs); printf(" Infinite: %5d (%2.1f%%)\n",inf, inf*100.0/(n+1.0) ); printf(" Point : %5d (%2.1f%%)\n",pnt, pnt*100.0/(n+1.0) ); printf(" Stable : %5d (%2.1f%%)\n",stb, stb*100.0/(n+1.0) ); printf(" Periodic: %5d (%2.1f%%)\n",per, per*100.0/(n+1.0) ); printf(" Chaotic : %5d (%2.1f%%)\n",cha, cha*100.0/(n+1.0) ); /* saves in the PGM (greyscale) format */ int SaveAttractor(int n,double *a, double lyap) { double xmin,xmax,ymin,ymax,zmin,zmax; char fname[128] = {0; int i,ix,iy; int width = 500, height = 500; int len=0; long loc, wh, wh1; unsigned char *image = NULL; FILE *fptr = NULL; wh = width*height; wh1 = (width+1)*(height+1); xmin = 1e32;
160 160 xmax = -1e32; ymin = 1e32; ymax = -1e32; zmin = 1e32; zmax = -1e32; for (i=100;i<maxiterations;i++) { if( x[i] > xmax ) xmax = x[i]; if( y[i] > ymax ) ymax = y[i]; if( z[i] > zmax ) zmax = z[i]; if( x[i] < xmin ) xmin = x[i]; if( y[i] < ymin ) ymin = y[i]; if( z[i] < zmin ) zmin = z[i]; /* Save the parameters */ sprintf(fname,"%05d.txt",n); if ((fptr = fopen(fname,"w")) == NULL) { fprintf(stderr,"couldn't open file '%s' for writing.\n",fname); return(false); fprintf(fptr,"%g %g %g %g\n",xmin,ymin,xmax,ymax); for (i=0;i<5;i++) fprintf(fptr,"%g\n",a[i]); fprintf(fptr,"%g\n",lyap); fclose(fptr); /* Save the image */ sprintf(fname,"%05d.pgm",n); image = malloc( wh1*sizeof(char) ); if( image == NULL ) { fprintf(stderr,"couldn't alloc memory for image '%s'.\n",fname); return(false); memset( image, 0, wh1*sizeof(char) ); if ((fptr = fopen(fname,"w")) == NULL) { fprintf(stderr,"couldn't open file '%s' for writing.\n",fname); return(false); fprintf(fptr,"p2\n%d %d\n",width, height); fprintf(fptr,"255\n"); for (i=100;i<maxiterations;i++) { ix = (int)(width * (x[i] - xmin) / (xmax - xmin)); iy = (int)(height * (y[i] - ymin) / (ymax - ymin)); loc = iy*width + ix; if( loc >=0 && loc < wh1 ) { if( image[ loc ] == 0) image[ loc ] = 200; else { if( image[ loc ] < 255)
![161 image[ loc ]++; for (i=0; i<wh1; i++) { fprintf(fptr,"%d ",(unsigned char)image[ i ]); len+=4; if(len >](/docs-images/60/45291229/images/161-0.png "66) { fprintf(fptr,\"\n\"); len=0; fclose(fptr); return TRUE; Παρακάτω, εµφανίζονται σε µορφή.")
161 161 image[ loc ]++; for (i=0; i<wh1; i++) { fprintf(fptr,"%d ",(unsigned char)image[ i ]); len+=4; if(len > 66) { fprintf(fptr,"\n"); len=0; fclose(fptr); return TRUE; Παρακάτω, εµφανίζονται σε µορφή.pgm οι ελκυστές:
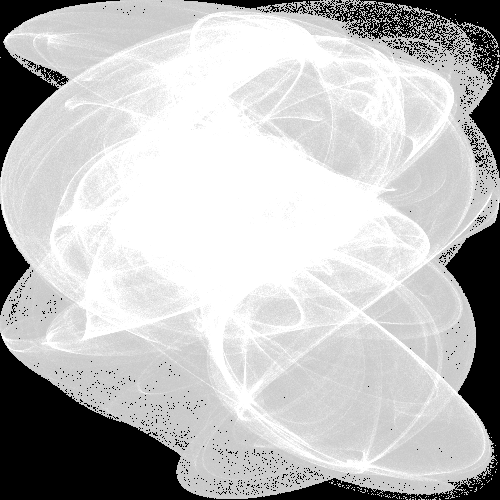

162 162
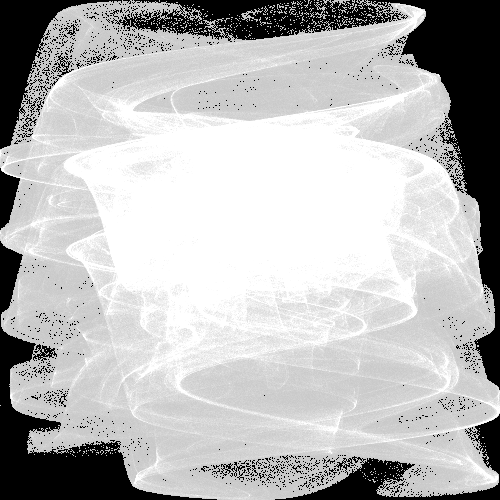

163 163

164 164

165 165

166 166
167 Εκθέτες Lyapunov του κυκλικού µοντέλου Lorenz µε πέντε µεταβλητές O ακόλουθος αλγόριθµος υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για το κυκλικό σύστηµα Lorenz µε πέντε µεταβλητές και το πρόγραµµα που χρησιµοποιείται είναι το LyapOde (βλέπε ).


168 Παρατηρούµε ότι οι εκθέτες Lyapunov είναι λ 1 = , λ 2 = , λ 3 = , λ 4 = και λ 5 =


169 Εκθέτες Lyapunov του συστήµατος υπερχάους του Rössler O ακόλουθος αλγόριθµος υπολογίζει και σχεδιάζει τους εκθέτες Lyapunov για το σύστηµα υπερχάους του Rössler και το πρόγραµµα που χρησιµοποιείται είναι το LyapOde (βλέπε ).


170 Παρατηρούµε ότι οι εκθέτες Lyapunov είναι λ 1 = , λ 2 = , λ 3 = , λ 4 =
171 Υπολογισµός εκθετών Lyapunov για την απεικόνιση Ikeda Το παρακάτω πρόγραµµα υπολογίζει το φάσµα των εκθετών Lyapunov για ένα διακριτό σύστηµα, και συγκεκριµένα για την απεικόνιση Ikeda. Αυτό γίνεται µε ολοκλήρωση Euler, ακολουθώντας την εργασία του Farmer(Farmer, J. D. "Chaotic Attractors of an Infinite-Dimensional Dynamical System." Physica D 4 (1982): ). /*Variable N should be as high as possible. Try If N>100 then it will need many-many hours... The integration step should be equal to: h=tau/n. Time-step h should have usually a maximum value at So, if tau is high then N should be high as well in order the calculation to be accurate*/ #include <iostream.h> #include <fstream.h> #include <stdlib.h> #include <math.h> #include <time.h> #include <stdio.h> #include <cstdlib> #include <ctime> #define pi #define value_zero #define N 100 #define Na (N+1)*(N+1)+N+2 #define NN (N+1)*(N+1)+N double tau = 5. ; double b = 5.; double fi= -pi/4.; double imax=pow(10,5); int num=0; double X[Na], Xnew[Na] ; double CUM[N+1], Znorm[N+1], GSC[N+1], lyp_exp[n+1] ; int main(void) { double h=tau/n, t=0; int i, k, j, l; ofstream fout; ofstream fout1; ofstream fout2; ofstream fout3; fout.open("xof.txt"); fout2.open("yof.txt"); fout1.open("tof.txt"); fout3.open("les.txt"); /* Init. Condts */ for (int mal=1; mal<=n; mal++) X[mal]=1. ;
172 172 /* Init. Condts for linear system (orthonormal frame) */ for (i = N+1; i <= NN; i++) X[i] = 0.0; for (i = 1; i <= N; i++) { X[(N+1)*i] = 1.0; CUM[i] = 0.0; /* Start iterating... */ for (int d=1; d<imax; d++) { /* Ikeda Equations */ Xnew[1] = X[1] + h*( b*pow(sin(x[n]+fi),2) - X[1] ); for (k=1; k<=n; k++) { Xnew[k+1]=X[k]; X[k]=Xnew[k]; /* Linearized Equations */ for (i = 0; i < N; i++) Xnew[(1)*N+1+i] = X[(1)*N+1+i] + h*( X[(N)*N+1+i]*2*b*sin(X[N]+fi)*cos(X[N]+fi) - X[(1)*N+1+i] ); for (k=1; k<=n; k++) { for (i = 0; i < N; i++) { Xnew[(k+1)*N+1+i]=X[(k)*N+1+i]; X[(k)*N+1+i]=Xnew[(k)*N+1+i]; t+=h; points*/ /* Write output files for the orbit for i.e. num=20000 num=num+1; if( num<20000 ) { fout<<x[1]<<endl; fout2<<x[n]<<endl; fout1<<t<<endl; /* Normalize first vector */ Znorm[1] = 0.0; for (j = 1; j <= N; j++) Znorm[1] = Znorm[1] + X[N*j+1] * X[N*j+1]; Znorm[1] = sqrt(znorm[1]); for (j = 1; j <= N; j++) X[N*j+1] = X[N*j+1] / Znorm[1]; /* Generate new orthonormal set of vectors */ for (j = 2; j <= N; j++) {
173 173 /* Generate J-1 GSC coefficients */ for (k = 1; k <= j-1; k++) { GSC[k] = 0.0; for (l = 1; l <= N; l++) GSC[k] = GSC[k] + X[N*l+j] * X[N*l+k]; /* Construct a new vector */ for (k = 1; k <= N; k++) for (l = 1; l <= j-1; l++) X[N*k+j] = X[N*k+j] - GSC[l] * X[N*k+l]; /* Calculate the vector's norm */ Znorm[j] = 0.0; for (k = 1; k <= N; k++) Znorm[j] = Znorm[j] + X[N*k+j] * X[N*k+j]; Znorm[j] = sqrt(znorm[j]); /* Normalize the new vector */ for (k = 1; k <= N; k++) X[N*k+j] = X[N*k+j] / Znorm[j]; /* Update running vectors magnitudes */ for (k = 1; k <= N; k++) CUM[k] = CUM[k] + log(znorm[k]) / log(2.0); if (d % 10 == 0) { for (j = 1; j <= N; j++) lyp_exp[j] = log(2.0)*cum[j] / t; /* Calculate the Lyapunov dimension Dky */ double sum=0, lsum, Dky, LEsum=0.; int kmax; for (int j1=1; j1<=n; j1++) { sum = sum + lyp_exp[j1] ; if( sum>=0 ) { kmax=j1; lsum=sum; Dky = kmax - lsum/lyp_exp[kmax+1]; /* The value of the Jacobian trace, that is equal to the sum of all LEs */ for (int j2=1; j2<=n; j2++) LEsum = LEsum + lyp_exp[j2] ; /* Check positive, zero and negative LEs */ int pos=0,zero=0, negative=0, jl; for (jl=1; jl<=n; jl++) {
174 174 if(lyp_exp[jl]>value_zero) pos=pos+1; if(fabs(lyp_exp[jl])<value_zero) zero=zero+1; if(lyp_exp[jl]<-value_zero) negative=negative+1; if( d%200==0) cout<<d/ <<"\t"<<lyp_exp[1]<<"\t"<<pos<<"\t"<<zero<<"\t" <<negative<<"\t"<<lesum<<"\t"<<dky<<endl; /* End iterating! */ /* Write output file for the LEs spectrum*/ for (int jk=1; jk<=n; jk++) fout3<<lyp_exp[jk]<<endl; 5.4 Προγράµµατα σε άλλες πλατφόρµες Εκθέτες Lyapunov της απεικόνισης Hénon µε πρόγραµµα στα DOS Αυτό το πρόγραµµα, NETLE.EXE, εκτιµά µοντέλα δικτύων και υπολογίζει τους εκθέτες Lyapunov (LE). Οι εκθέτες Lyapunov υπολογίζονται από τους πίνακες των εκτιµώµενων µοντέλων δικτύου (Gencay and Dechert (1992)). Σηµειώνουµε ότι ένα θετικός εκθέτης Lyapunov υποδηλώνει ότι η υποφαινόµενη σειρά είναι χαοτική. Οι περιορισµοί του προγράµµατος είναι δύο: 1) εδοµένα: ο µέγιστος αριθµός παρατηρήσεων είναι ) ίκτυο: ο µέγιστος αριθµός εισόδων είναι 20 και ο µέγιστος αριθµός κρυφών µονάδων είναι 20. Το NETLE δεν είναι interactive πρόγραµµα. Η εκτέλεση του προγράµµατος ελέγχεται από ένα αρχείο ελέγχου που περιέχει πληροφορίες του ονόµατος του αρχείου δεδοµένων, της δοµής του δικτύου, και άλλες επιλογές για τον υπολογισµό. Έτσι, παρακάτω παρουσιάζεται το συγκεκριµένο πρόγραµµα για τον υπολογισµό των εκθετών Lyapunov της αναπαράστασης Hénon.
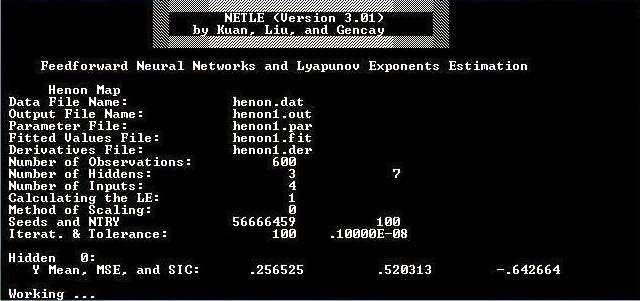

175 175

176 Παρατηρούµε, µετά το τέλος των επαναλήψεων, ότι οι εκθέτες Lyapunov είναι: λ 1 = λ 2 = λ 3 = λ 4 =
Μηχανική ΙI Ροή στο χώρο των φάσεων, θεώρηµα Liouville
 Τµήµα Π. Ιωάννου & Θ. Αποστολάτου 16/5/2000 Μηχανική ΙI Ροή στο χώρο των φάσεων, θεώρηµα Liouville Στη Χαµιλτονιανή θεώρηση η κατάσταση του συστήµατος προσδιορίζεται κάθε στιγµή από ένα και µόνο σηµείο
Τµήµα Π. Ιωάννου & Θ. Αποστολάτου 16/5/2000 Μηχανική ΙI Ροή στο χώρο των φάσεων, θεώρηµα Liouville Στη Χαµιλτονιανή θεώρηση η κατάσταση του συστήµατος προσδιορίζεται κάθε στιγµή από ένα και µόνο σηµείο
Κεφάλαιο 6. Εισαγωγή στη µέθοδο πεπερασµένων όγκων επίλυση ελλειπτικών και παραβολικών διαφορικών εξισώσεων
 Κεφάλαιο 6 Εισαγωγή στη µέθοδο πεπερασµένων όγκων επίλυση ελλειπτικών παραβολικών διαφορικών εξισώσεων 6.1 Εισαγωγή Η µέθοδος των πεπερασµένων όγκων είναι µία ευρέως διαδεδοµένη υπολογιστική µέθοδος επίλυσης
Κεφάλαιο 6 Εισαγωγή στη µέθοδο πεπερασµένων όγκων επίλυση ελλειπτικών παραβολικών διαφορικών εξισώσεων 6.1 Εισαγωγή Η µέθοδος των πεπερασµένων όγκων είναι µία ευρέως διαδεδοµένη υπολογιστική µέθοδος επίλυσης
, όπου οι σταθερές προσδιορίζονται από τις αρχικές συνθήκες.
 Στην περίπτωση της ταλάντωσης µε κρίσιµη απόσβεση οι δύο γραµµικώς ανεξάρτητες λύσεις εκφυλίζονται (καταλήγουν να ταυτίζονται) Στην περιοχή ασθενούς απόσβεσης ( ) δύο γραµµικώς ανεξάρτητες λύσεις είναι
Στην περίπτωση της ταλάντωσης µε κρίσιµη απόσβεση οι δύο γραµµικώς ανεξάρτητες λύσεις εκφυλίζονται (καταλήγουν να ταυτίζονται) Στην περιοχή ασθενούς απόσβεσης ( ) δύο γραµµικώς ανεξάρτητες λύσεις είναι
Χρονοσειρές - Μάθημα 7. Μη-γραμμική ανάλυση χρονοσειρών
 Χρονοσειρές - Μάθημα 7 Μη-γραμμική ανάλυση χρονοσειρών Γραμμική ανάλυση / Γραμμικά μοντέλα αυτοσυσχέτιση AR μοντέλο ARMA(p,q) μοντέλο x x px p z z z q q Πλεονεκτήματα:. Απλά 2. Κανονική διαδικασία, ανεπτυγμένη
Χρονοσειρές - Μάθημα 7 Μη-γραμμική ανάλυση χρονοσειρών Γραμμική ανάλυση / Γραμμικά μοντέλα αυτοσυσχέτιση AR μοντέλο ARMA(p,q) μοντέλο x x px p z z z q q Πλεονεκτήματα:. Απλά 2. Κανονική διαδικασία, ανεπτυγμένη
ΚΕΦΑΛΑΙΟ 3 ΑΡΙΘΜΗΤΙΚΗ ΕΠΙΛΥΣΗ ΓΡΑΜΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ. nn n n
 ΚΕΦΑΛΑΙΟ 3 ΑΡΙΘΜΗΤΙΚΗ ΕΠΙΛΥΣΗ ΓΡΑΜΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ 3 Ο αλγόριθµος Gauss Eστω =,3,, µε τον όρο γραµµικά συστήµατα, εννοούµε συστήµατα εξισώσεων µε αγνώστους της µορφής: a x + + a x = b a x + + a x = b a
ΚΕΦΑΛΑΙΟ 3 ΑΡΙΘΜΗΤΙΚΗ ΕΠΙΛΥΣΗ ΓΡΑΜΜΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ 3 Ο αλγόριθµος Gauss Eστω =,3,, µε τον όρο γραµµικά συστήµατα, εννοούµε συστήµατα εξισώσεων µε αγνώστους της µορφής: a x + + a x = b a x + + a x = b a
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER
 4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
Λ. Ζαχείλας. Επίκουρος Καθηγητής Εφαρμοσμένων Μαθηματικών Τμήμα Οικονομικών Επιστημών Πανεπιστήμιο Θεσσαλίας. Οικονομική Δυναμική 29/6/14
 1 Λ. Ζαχείλας Επίκουρος Καθηγητής Εφαρμοσμένων Μαθηματικών Τμήμα Οικονομικών Επιστημών Πανεπιστήμιο Θεσσαλίας Οικονομική Δυναμική Κατηγορίες f.p. σε γραμμικά διαφορικά συστήματα 1 ης τάξης Έστω το γενικό
1 Λ. Ζαχείλας Επίκουρος Καθηγητής Εφαρμοσμένων Μαθηματικών Τμήμα Οικονομικών Επιστημών Πανεπιστήμιο Θεσσαλίας Οικονομική Δυναμική Κατηγορίες f.p. σε γραμμικά διαφορικά συστήματα 1 ης τάξης Έστω το γενικό
Διδάσκων: Καθηγητής Νικόλαος Μαρμαρίδης, Καθηγητής Ιωάννης Μπεληγιάννης
 Τίτλος Μαθήματος: Γραμμική Άλγεβρα ΙΙ Ενότητα: Η Ορίζουσα Gram και οι Εφαρµογές της Διδάσκων: Καθηγητής Νικόλαος Μαρμαρίδης, Καθηγητής Ιωάννης Μπεληγιάννης Τμήμα: Μαθηματικών 65 11 Η Ορίζουσα Gram και
Τίτλος Μαθήματος: Γραμμική Άλγεβρα ΙΙ Ενότητα: Η Ορίζουσα Gram και οι Εφαρµογές της Διδάσκων: Καθηγητής Νικόλαος Μαρμαρίδης, Καθηγητής Ιωάννης Μπεληγιάννης Τμήμα: Μαθηματικών 65 11 Η Ορίζουσα Gram και
ΣΗΜΑΤΑ ΚΑΙ ΣΥΣΤΗΜΑΤΑ. Εισαγωγή στα Σήµατα Εισαγωγή στα Συστήµατα Ανάπτυγµα - Μετασχηµατισµός Fourier Μετασχηµατισµός Z
 ΣΗΜΑΤΑ ΚΑΙ ΣΥΣΤΗΜΑΤΑ Εισαγωγή στα Σήµατα Εισαγωγή στα Συστήµατα Ανάπτυγµα - Μετασχηµατισµός Fourier Μετασχηµατισµός Laplace Μετασχηµατισµός Z Εφαρµογές Παράδειγµα ενός ηλεκτρικού συστήµατος Σύστηµα Παράδειγµα
ΣΗΜΑΤΑ ΚΑΙ ΣΥΣΤΗΜΑΤΑ Εισαγωγή στα Σήµατα Εισαγωγή στα Συστήµατα Ανάπτυγµα - Μετασχηµατισµός Fourier Μετασχηµατισµός Laplace Μετασχηµατισµός Z Εφαρµογές Παράδειγµα ενός ηλεκτρικού συστήµατος Σύστηµα Παράδειγµα
Χρονοσειρές - Μάθημα 9 Aνάλυση χρονοσειρών και δυναμικά συστήματα
 Χρονοσειρές - Μάθημα 9 Aνάλυση χρονοσειρών και δυναμικά συστήματα - Ανακατασκευή του χώρου καταστάσεων παρατήρηση της πολυπλοκότητας / στοχαστικότητας / δομής του συστήματος - Εκτίμηση χαρακτηριστικών
Χρονοσειρές - Μάθημα 9 Aνάλυση χρονοσειρών και δυναμικά συστήματα - Ανακατασκευή του χώρου καταστάσεων παρατήρηση της πολυπλοκότητας / στοχαστικότητας / δομής του συστήματος - Εκτίμηση χαρακτηριστικών
ΛΥΣΕΙΣ 6 ης ΕΡΓΑΣΙΑΣ - ΠΛΗ 12,
 ΛΥΣΕΙΣ 6 ης ΕΡΓΑΣΙΑΣ - ΠΛΗ, - Οι παρακάτω λύσεις των ασκήσεων της 6 ης εργασίας που καλύπτει το µεγαλύτερο µέρος της ύλης της θεµατικής ενότητας ΠΛΗ) είναι αρκετά εκτεταµένες καθώς έχει δοθεί αρκετή έµφαση
ΛΥΣΕΙΣ 6 ης ΕΡΓΑΣΙΑΣ - ΠΛΗ, - Οι παρακάτω λύσεις των ασκήσεων της 6 ης εργασίας που καλύπτει το µεγαλύτερο µέρος της ύλης της θεµατικής ενότητας ΠΛΗ) είναι αρκετά εκτεταµένες καθώς έχει δοθεί αρκετή έµφαση
Χάος και Φράκταλ. ιδάσκων: Α.Μπούντης, Καθηγητής Ασκήσεις ΟΜΑ Α Α 1) Να δειχθεί ότι η οικογένεια των κλειστών καµπυλών x x e = c τείνει 2 1)
 Να δειχθεί ότι η οικογένεια των κλειστών καµπυλών x x e = c τείνει 2 1)") Χάος και Φράκταλ ιδάσκων: ΑΜπούντης, Καθηγητής Ασκήσεις ΟΜΑ Α Α + ) ) Να δειχθεί ότι η οικογένεια των κλειστών καµπυλών e = c τείνει σε εκείνη των ελλείψεων ξ ξ + = K, όταν, ) b, a) Τα Κ,c είναι b a αυθαίρετες
Χάος και Φράκταλ ιδάσκων: ΑΜπούντης, Καθηγητής Ασκήσεις ΟΜΑ Α Α + ) ) Να δειχθεί ότι η οικογένεια των κλειστών καµπυλών e = c τείνει σε εκείνη των ελλείψεων ξ ξ + = K, όταν, ) b, a) Τα Κ,c είναι b a αυθαίρετες
QR είναι ˆx τότε x ˆx. 10 ρ. Ποιά είναι η τιµή του ρ και γιατί (σύντοµη εξήγηση). P = [X. 0, X,..., X. (n 1), X. n] a(n + 1 : 1 : 1)
![QR είναι ˆx τότε x ˆx. 10 ρ. Ποιά είναι η τιµή του ρ και γιατί (σύντοµη εξήγηση). P = [X. 0, X,..., X. (n 1), X. n] a(n + 1 : 1 : 1)](/thumbs/27/10724538.jpg "QR είναι ˆx τότε x ˆx. 10 ρ. Ποιά είναι η τιµή του ρ και γιατί (σύντοµη εξήγηση). P = [X. 0, X,..., X. (n 1), X. n] a(n + 1 : 1 : 1)") ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΥΠΟΛΟΓΙΣΜΟΣ I (22 Σεπτεµβρίου) ΕΠΙΛΕΓΜΕΝΕΣ ΑΠΑΝΤΗΣΕΙΣ 1ο ΘΕΜΑ 1. Αφού ορίσετε ακριβώς τι σηµαίνει πίσω ευσταθής υπολογισµός, να εξηγήσετε αν ο υ- πολογισµός του εσωτερικού γινοµένου δύο διανυσµάτων
ΕΠΙΣΤΗΜΟΝΙΚΟΣ ΥΠΟΛΟΓΙΣΜΟΣ I (22 Σεπτεµβρίου) ΕΠΙΛΕΓΜΕΝΕΣ ΑΠΑΝΤΗΣΕΙΣ 1ο ΘΕΜΑ 1. Αφού ορίσετε ακριβώς τι σηµαίνει πίσω ευσταθής υπολογισµός, να εξηγήσετε αν ο υ- πολογισµός του εσωτερικού γινοµένου δύο διανυσµάτων
Q 12. c 3 Q 23. h 12 + h 23 + h 31 = 0 (6)
") Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Πολιτικών Μηχανικών Τοµέας Υδατικών Πόρων Μάθηµα: Τυπικά Υδραυλικά Έργα Μέρος 2: ίκτυα διανοµής Άσκηση E0: Μαθηµατική διατύπωση µοντέλου επίλυσης απλού δικτύου διανοµής
Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Πολιτικών Μηχανικών Τοµέας Υδατικών Πόρων Μάθηµα: Τυπικά Υδραυλικά Έργα Μέρος 2: ίκτυα διανοµής Άσκηση E0: Μαθηµατική διατύπωση µοντέλου επίλυσης απλού δικτύου διανοµής
4.3. Γραµµικοί ταξινοµητές
 Γραµµικοί ταξινοµητές Γραµµικός ταξινοµητής είναι ένα σύστηµα ταξινόµησης που χρησιµοποιεί γραµµικές διακριτικές συναρτήσεις Οι ταξινοµητές αυτοί αναπαρίστανται συχνά µε οµάδες κόµβων εντός των οποίων
Γραµµικοί ταξινοµητές Γραµµικός ταξινοµητής είναι ένα σύστηµα ταξινόµησης που χρησιµοποιεί γραµµικές διακριτικές συναρτήσεις Οι ταξινοµητές αυτοί αναπαρίστανται συχνά µε οµάδες κόµβων εντός των οποίων
Μαθηµατικό Παράρτηµα 2 Εξισώσεις Διαφορών
 Γιώργος Αλογοσκούφης, Δυναµική Μακροοικονοµική, Αθήνα 206 Μαθηµατικό Παράρτηµα 2 Εξισώσεις Διαφορών Στο παράρτηµα αυτό εξετάζουµε τις ιδιότητες και τους τρόπους επίλυσης εξισώσεων διαφορών. Oι εξισώσεις
Γιώργος Αλογοσκούφης, Δυναµική Μακροοικονοµική, Αθήνα 206 Μαθηµατικό Παράρτηµα 2 Εξισώσεις Διαφορών Στο παράρτηµα αυτό εξετάζουµε τις ιδιότητες και τους τρόπους επίλυσης εξισώσεων διαφορών. Oι εξισώσεις
Σηµειώσεις στις σειρές
 . ΟΡΙΣΜΟΙ - ΓΕΝΙΚΕΣ ΕΝΝΟΙΕΣ Σηµειώσεις στις σειρές Στην Ενότητα αυτή παρουσιάζουµε τις βασικές-απαραίτητες έννοιες για την µελέτη των σειρών πραγµατικών αριθµών και των εφαρµογών τους. Έτσι, δίνονται συστηµατικά
. ΟΡΙΣΜΟΙ - ΓΕΝΙΚΕΣ ΕΝΝΟΙΕΣ Σηµειώσεις στις σειρές Στην Ενότητα αυτή παρουσιάζουµε τις βασικές-απαραίτητες έννοιες για την µελέτη των σειρών πραγµατικών αριθµών και των εφαρµογών τους. Έτσι, δίνονται συστηµατικά
ΑΝΑΠΤΥΓΜA - ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ FOURIER ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ. Περιγράψουµε τον τρόπο ανάπτυξης σε σειρά Fourier ενός περιοδικού αναλογικού σήµατος.
 3. ΚΕΦΑΛΑΙΟ ΑΝΑΠΤΥΓΜA - ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ FOURIER ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Περιγράψουµε τον τρόπο ανάπτυξης σε σειρά Fourier ενός περιοδικού αναλογικού σήµατος. Ορίσουµε το µετασχηµατισµό Fourier ενός µη περιοδικού
3. ΚΕΦΑΛΑΙΟ ΑΝΑΠΤΥΓΜA - ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ FOURIER ΑΝΑΛΟΓΙΚΩΝ ΣΗΜΑΤΩΝ Περιγράψουµε τον τρόπο ανάπτυξης σε σειρά Fourier ενός περιοδικού αναλογικού σήµατος. Ορίσουµε το µετασχηµατισµό Fourier ενός µη περιοδικού
Κεφάλαιο 2. Μέθοδος πεπερασµένων διαφορών προβλήµατα οριακών τιµών µε Σ Ε
 Κεφάλαιο Μέθοδος πεπερασµένων διαφορών προβλήµατα οριακών τιµών µε Σ Ε. Εισαγωγή Η µέθοδος των πεπερασµένων διαφορών είναι από τις παλαιότερες και πλέον συνηθισµένες και διαδεδοµένες υπολογιστικές τεχνικές
Κεφάλαιο Μέθοδος πεπερασµένων διαφορών προβλήµατα οριακών τιµών µε Σ Ε. Εισαγωγή Η µέθοδος των πεπερασµένων διαφορών είναι από τις παλαιότερες και πλέον συνηθισµένες και διαδεδοµένες υπολογιστικές τεχνικές
A2. ΠΑΡΑΓΩΓΟΣ-ΚΛΙΣΗ-ΜΟΝΟΤΟΝΙΑ
 A. ΠΑΡΑΓΩΓΟΣ-ΚΛΙΣΗ-ΜΟΝΟΤΟΝΙΑ d df() = f() = f (), = d d.κλίση ευθείας.μεταβολές 3.(Οριακός) ρυθµός µεταβολής ή παράγωγος 4.Παράγωγοι βασικών συναρτήσεων 5. Κανόνες παραγώγισης 6.Αλυσωτή παράγωγος 7.Μονοτονία
A. ΠΑΡΑΓΩΓΟΣ-ΚΛΙΣΗ-ΜΟΝΟΤΟΝΙΑ d df() = f() = f (), = d d.κλίση ευθείας.μεταβολές 3.(Οριακός) ρυθµός µεταβολής ή παράγωγος 4.Παράγωγοι βασικών συναρτήσεων 5. Κανόνες παραγώγισης 6.Αλυσωτή παράγωγος 7.Μονοτονία
,..., xn) Οι συναρτήσεις που ορίζουν αυτό το σύστημα υποτίθενται παραγωγίσιμες με συνεχείς παραγώγους:
 Οι συναρτήσεις που ορίζουν αυτό το σύστημα υποτίθενται παραγωγίσιμες με συνεχείς παραγώγους:") ΜΑΘΗΜΑ 6 ο : ΕΥΣΤΑΘΕΙΑ ΤΩΝ ΚΑΤΑΣΤΑΣΕΩΝ ΙΣΟΡΡΟΠΙΑΣ (ΣΥΝΑΡΤΗΣΕΙΣ LYAPUNOV) O Aleksadr Lyapuv (857-98) έθεσε τις βάσεις της μαθηματικής θεωρίας της ευστάθειας που φέρει το όνομά του εμπνευσμένος από μια απλή
ΜΑΘΗΜΑ 6 ο : ΕΥΣΤΑΘΕΙΑ ΤΩΝ ΚΑΤΑΣΤΑΣΕΩΝ ΙΣΟΡΡΟΠΙΑΣ (ΣΥΝΑΡΤΗΣΕΙΣ LYAPUNOV) O Aleksadr Lyapuv (857-98) έθεσε τις βάσεις της μαθηματικής θεωρίας της ευστάθειας που φέρει το όνομά του εμπνευσμένος από μια απλή
Αριθµητική Ολοκλήρωση
 Κεφάλαιο 5 Αριθµητική Ολοκλήρωση 5. Εισαγωγή Για τη συντριπτική πλειοψηφία των συναρτήσεων f (x) δεν υπάρχουν ή είναι πολύ δύσχρηστοι οι τύποι της αντιπαραγώγου της f (x), δηλαδή της F(x) η οποία ικανοποιεί
Κεφάλαιο 5 Αριθµητική Ολοκλήρωση 5. Εισαγωγή Για τη συντριπτική πλειοψηφία των συναρτήσεων f (x) δεν υπάρχουν ή είναι πολύ δύσχρηστοι οι τύποι της αντιπαραγώγου της f (x), δηλαδή της F(x) η οποία ικανοποιεί
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ: ΠΛΗΡΟΦΟΡΙΚΗ ΘΕ: ΜΑΘΗΜΑΤΙΚΑ ΓΙΑ ΤΗΝ ΠΛΗΡΟΦΟΡΙΚΉ Ι (ΠΛΗ 12) ΛΥΣΕΙΣ ΕΡΓΑΣΙΑΣ 3
 ΛΥΣΕΙΣ ΕΡΓΑΣΙΑΣ 3") ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ: ΠΛΗΡΟΦΟΡΙΚΗ ΘΕ: ΜΑΘΗΜΑΤΙΚΑ ΓΙΑ ΤΗΝ ΠΛΗΡΟΦΟΡΙΚΉ Ι (ΠΛΗ ) ΛΥΣΕΙΣ ΕΡΓΑΣΙΑΣ Άσκηση. ( µον.). Έστω z ο µιγαδικός αριθµός z i, µε, R. (α) ίνεται η εξίσωση: z
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ: ΠΛΗΡΟΦΟΡΙΚΗ ΘΕ: ΜΑΘΗΜΑΤΙΚΑ ΓΙΑ ΤΗΝ ΠΛΗΡΟΦΟΡΙΚΉ Ι (ΠΛΗ ) ΛΥΣΕΙΣ ΕΡΓΑΣΙΑΣ Άσκηση. ( µον.). Έστω z ο µιγαδικός αριθµός z i, µε, R. (α) ίνεται η εξίσωση: z
αx αx αx αx 2 αx = α e } 2 x x x dx καλείται η παραβολική συνάρτηση η οποία στο x
 A3. ΕΥΤΕΡΗ ΠΑΡΑΓΩΓΟΣ-ΚΥΡΤΟΤΗΤΑ. εύτερη παράγωγος.παραβολική προσέγγιση ή επέκταση 3.Κυρτή 4.Κοίλη 5.Ιδιότητες κυρτών/κοίλων συναρτήσεων 6.Σηµεία καµπής ΠΑΡΑΡΤΗΜΑ 7. εύτερη πλεγµένη παραγώγιση 8.Χαρακτηρισµός
A3. ΕΥΤΕΡΗ ΠΑΡΑΓΩΓΟΣ-ΚΥΡΤΟΤΗΤΑ. εύτερη παράγωγος.παραβολική προσέγγιση ή επέκταση 3.Κυρτή 4.Κοίλη 5.Ιδιότητες κυρτών/κοίλων συναρτήσεων 6.Σηµεία καµπής ΠΑΡΑΡΤΗΜΑ 7. εύτερη πλεγµένη παραγώγιση 8.Χαρακτηρισµός
= x. = x1. math60.nb
 MH ΓΡΑΜΜΙΚΑ ΑΥΤΟΝΟΜΑ ΥΝΑΜΙΚΑ ΣΥΣΤΗΜΑΤΑ ΙΑΣΤΑΣΕΩΝ Χώρος Φάσεων : Επίπεδο (, Φασικές Τροχιές : Επίπεδες µονοπαραµετρικές καµπύλες (t (t χωρίς εγκάρσιες τοµές. Οι φασικές τροχιές µπορούν να υπολογιστούν από
MH ΓΡΑΜΜΙΚΑ ΑΥΤΟΝΟΜΑ ΥΝΑΜΙΚΑ ΣΥΣΤΗΜΑΤΑ ΙΑΣΤΑΣΕΩΝ Χώρος Φάσεων : Επίπεδο (, Φασικές Τροχιές : Επίπεδες µονοπαραµετρικές καµπύλες (t (t χωρίς εγκάρσιες τοµές. Οι φασικές τροχιές µπορούν να υπολογιστούν από
Γεωµετρικη Θεωρια Ελεγχου
 Αριστοτελειο Πανεπιστηµιο Θεσσαλονικης Σχολη Θετικων Επιστηµων Τµηµα Μαθηµατικων Χειµερινό Εξάµηνο 2016-2017 Γεωµετρικη Θεωρια Ελεγχου εύτερη Εργασία 1. Βρείτε δύο διαφορετικά παραδείγµατα συστηµάτων στο
Αριστοτελειο Πανεπιστηµιο Θεσσαλονικης Σχολη Θετικων Επιστηµων Τµηµα Μαθηµατικων Χειµερινό Εξάµηνο 2016-2017 Γεωµετρικη Θεωρια Ελεγχου εύτερη Εργασία 1. Βρείτε δύο διαφορετικά παραδείγµατα συστηµάτων στο
Κλασικη ιαφορικη Γεωµετρια
 Αριστοτελειο Πανεπιστηµιο Θεσσαλονικης Σχολη Θετικων Επιστηµων, Τµηµα Μαθηµατικων, Τοµεας Γεωµετριας Κλασικη ιαφορικη Γεωµετρια Πρώτη Εργασία, 2018-19 1 Προαπαιτούµενες γνώσεις και ϐασική προετοιµασία
Αριστοτελειο Πανεπιστηµιο Θεσσαλονικης Σχολη Θετικων Επιστηµων, Τµηµα Μαθηµατικων, Τοµεας Γεωµετριας Κλασικη ιαφορικη Γεωµετρια Πρώτη Εργασία, 2018-19 1 Προαπαιτούµενες γνώσεις και ϐασική προετοιµασία
Επίλυση Γραµµικών Συστηµάτων
 Κεφάλαιο 3 Επίλυση Γραµµικών Συστηµάτων 31 Εισαγωγή Αριθµητική λύση γενικών γραµµικών συστηµάτων n n A n n x n 1 b n 1, όπου a 11 a 12 a 1n a 21 a 22 a 2n A [a i j, x a n1 a n2 a nn x n, b b 1 b 2 b n
Κεφάλαιο 3 Επίλυση Γραµµικών Συστηµάτων 31 Εισαγωγή Αριθµητική λύση γενικών γραµµικών συστηµάτων n n A n n x n 1 b n 1, όπου a 11 a 12 a 1n a 21 a 22 a 2n A [a i j, x a n1 a n2 a nn x n, b b 1 b 2 b n
Κεφάλαιο 6 Παράγωγος
 Σελίδα από 5 Κεφάλαιο 6 Παράγωγος Στο κεφάλαιο αυτό στόχος µας είναι να συνδέσουµε µία συγκεκριµένη συνάρτηση f ( ) µε µία δεύτερη συνάρτηση f ( ), την οποία και θα ονοµάζουµε παράγωγο της f. Η τιµή της
Σελίδα από 5 Κεφάλαιο 6 Παράγωγος Στο κεφάλαιο αυτό στόχος µας είναι να συνδέσουµε µία συγκεκριµένη συνάρτηση f ( ) µε µία δεύτερη συνάρτηση f ( ), την οποία και θα ονοµάζουµε παράγωγο της f. Η τιµή της
7. Ταλαντώσεις σε συστήµατα µε πολλούς βαθµούς ελευθερίας
 7 Ταλαντώσεις σε συστήµατα µε πολλούς βαθµούς ελευθερίας Συζευγµένες ταλαντώσεις Βιβλιογραφία F S Crawford Jr Κυµατική (Σειρά Μαθηµάτων Φυσικής Berkeley, Τόµος 3 Αθήνα 979) Κεφ H J Pai Φυσική των ταλαντώσεων
7 Ταλαντώσεις σε συστήµατα µε πολλούς βαθµούς ελευθερίας Συζευγµένες ταλαντώσεις Βιβλιογραφία F S Crawford Jr Κυµατική (Σειρά Μαθηµάτων Φυσικής Berkeley, Τόµος 3 Αθήνα 979) Κεφ H J Pai Φυσική των ταλαντώσεων
1. ** Αν F είναι µια παράγουσα της f στο R, τότε να αποδείξετε ότι και η
 Ερωτήσεις ανάπτυξης. ** Αν F είναι µια παράγουσα της f στο R, τότε να αποδείξετε ότι και η συνάρτηση G () = F (α + β) είναι µια παράγουσα της h () = f (α + β), α α στο R. β + γ α+ γ. ** α) Να δείξετε ότι
Ερωτήσεις ανάπτυξης. ** Αν F είναι µια παράγουσα της f στο R, τότε να αποδείξετε ότι και η συνάρτηση G () = F (α + β) είναι µια παράγουσα της h () = f (α + β), α α στο R. β + γ α+ γ. ** α) Να δείξετε ότι
ΑΝΑΛΛΟΙΩΤΑ ΣΥΝΟΛΑ, ΟΡΙΑΚΑ ΣΥΝΟΛΑ
 Κεφάλαιο 8 ΑΝΑΛΛΟΙΩΤΑ ΣΥΝΟΛΑ, ΟΡΙΑΚΑ ΣΥΝΟΛΑ Θεωρούμε πάλι μία ΔΕ ẋ = f (x), όπου το διανυσματικό πεδίο f είναι κλάσεως C 1 σε ένα ανοιχτό υποσύνολο E του R n και έστω φ η ροή της. 8.1 Βασικοί ορισμοί Το
Κεφάλαιο 8 ΑΝΑΛΛΟΙΩΤΑ ΣΥΝΟΛΑ, ΟΡΙΑΚΑ ΣΥΝΟΛΑ Θεωρούμε πάλι μία ΔΕ ẋ = f (x), όπου το διανυσματικό πεδίο f είναι κλάσεως C 1 σε ένα ανοιχτό υποσύνολο E του R n και έστω φ η ροή της. 8.1 Βασικοί ορισμοί Το
( ) = inf { (, Ρ) : Ρ διαµέριση του [, ]}
![( ) = inf { (, Ρ) : Ρ διαµέριση του [, ]}](/thumbs/63/48901497.jpg "( ) = inf { (, Ρ) : Ρ διαµέριση του [, ]}") 7 ΙΙΙ Ολοκληρωτικός Λογισµός πολλών µεταβλητών Βασικές έννοιες στη µια µεταβλητή Έστω f :[ ] φραγµένη συνάρτηση ( Ρ = { t = < < t = } είναι διαµέριση του [ ] 0 ( Ρ ) = Μ ( ) όπου sup f ( t) : t [ t t]
7 ΙΙΙ Ολοκληρωτικός Λογισµός πολλών µεταβλητών Βασικές έννοιες στη µια µεταβλητή Έστω f :[ ] φραγµένη συνάρτηση ( Ρ = { t = < < t = } είναι διαµέριση του [ ] 0 ( Ρ ) = Μ ( ) όπου sup f ( t) : t [ t t]
Διδάσκων: Καθηγητής Νικόλαος Μαρμαρίδης, Καθηγητής Ιωάννης Μπεληγιάννης
 Τίτλος Μαθήματος: Γραμμική Άλγεβρα ΙΙ Ενότητα: Παραγοντοποιήσεις Πινάκων και Γραµµικών Απεικονίσεων Διδάσκων: Καθηγητής Νικόλαος Μαρμαρίδης, Καθηγητής Ιωάννης Μπεληγιάννης Τμήμα: Μαθηματικών 82 13 Παραγοντοποιήσεις
Τίτλος Μαθήματος: Γραμμική Άλγεβρα ΙΙ Ενότητα: Παραγοντοποιήσεις Πινάκων και Γραµµικών Απεικονίσεων Διδάσκων: Καθηγητής Νικόλαος Μαρμαρίδης, Καθηγητής Ιωάννης Μπεληγιάννης Τμήμα: Μαθηματικών 82 13 Παραγοντοποιήσεις
Καρτεσιανό Σύστηµα y. y A. x A
 Στη γενική περίπτωση µπορούµε να ορίσουµε άπειρα συστήµατα συντεταγ- µένων τα οποία να µας επιτρέπουν να προσδιορίσουµε τη θέση ενός σηµείου. Στη Φυσική χρησιµοποιούνται αρκετά. Τα βασικά από αυτά θα εξετάσουµε
Στη γενική περίπτωση µπορούµε να ορίσουµε άπειρα συστήµατα συντεταγ- µένων τα οποία να µας επιτρέπουν να προσδιορίσουµε τη θέση ενός σηµείου. Στη Φυσική χρησιµοποιούνται αρκετά. Τα βασικά από αυτά θα εξετάσουµε
Κανονικ ες ταλαντ ωσεις
 Κανονικες ταλαντωσεις Ειδαµε ηδη οτι φυσικα συστηµατα πλησιον ενος σηµειου ευαταθους ισορροπιας συ- µπεριφερονται οπως σωµατιδια που αλληλεπιδρουν µε γραµµικες δυναµεις επαναφορας οπως θα συνεαινε σε σωµατιδια
Κανονικες ταλαντωσεις Ειδαµε ηδη οτι φυσικα συστηµατα πλησιον ενος σηµειου ευαταθους ισορροπιας συ- µπεριφερονται οπως σωµατιδια που αλληλεπιδρουν µε γραµµικες δυναµεις επαναφορας οπως θα συνεαινε σε σωµατιδια
Εκτίμηση μη-γραμμικών χαρακτηριστικών
 Εκτίμηση μη-γραμμικών χαρακτηριστικών Μη-γραμμικά χαρακτηριστικά ή αναλλοίωτα μέτρα Διάσταση. Ευκλείδια. Τοπολογική 3. Μορφοκλασματική (συσχέτισης, πληροφορίας, μέτρησης κουτιών, ) Εκθέτες Lypunov (μεγαλύτερος,
Εκτίμηση μη-γραμμικών χαρακτηριστικών Μη-γραμμικά χαρακτηριστικά ή αναλλοίωτα μέτρα Διάσταση. Ευκλείδια. Τοπολογική 3. Μορφοκλασματική (συσχέτισης, πληροφορίας, μέτρησης κουτιών, ) Εκθέτες Lypunov (μεγαλύτερος,
Αρµονική Ανάλυση. Ενότητα: L 2 -σύγκλιση σειρών Fourier. Απόστολος Γιαννόπουλος. Τµήµα Μαθηµατικών
 Ενότητα: L -σύγκλιση σειρών Fourier Απόστολος Γιαννόπουλος Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες,
Ενότητα: L -σύγκλιση σειρών Fourier Απόστολος Γιαννόπουλος Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες,
x (t) u (t) = x 0 u 0 e 2t,
 u (t) = x 0 u 0 e 2t,") Κεφάλαιο 7 Η ΕΝΝΟΙΑ ΤΗΣ ΕΥΣΤΑΘΕΙΑΣ Η ευαισθησία της λύσης μιας ΔΕ σε μεταβολές της αρχικής τιμής είναι έ- να θεμελιώδες ζήτημα στη θεωρία αλλά και στις εφαρμογές των διαφορικών εξισώσεων. Παράδειγμα 7.0.3.
Κεφάλαιο 7 Η ΕΝΝΟΙΑ ΤΗΣ ΕΥΣΤΑΘΕΙΑΣ Η ευαισθησία της λύσης μιας ΔΕ σε μεταβολές της αρχικής τιμής είναι έ- να θεμελιώδες ζήτημα στη θεωρία αλλά και στις εφαρμογές των διαφορικών εξισώσεων. Παράδειγμα 7.0.3.
Ακρότατα υπό συνθήκη και οι πολλαπλασιαστές του Lagrange
 64 Ακρότατα υπό συνθήκη και οι πολλαπλασιαστές του Lagrage Ας υποθέσουµε ότι ένας δεδοµένος χώρος θερµαίνεται και η θερµοκρασία στο σηµείο,, Τ, y, z Ας υποθέσουµε ότι ( y z ) αυτού του χώρου δίδεται από
64 Ακρότατα υπό συνθήκη και οι πολλαπλασιαστές του Lagrage Ας υποθέσουµε ότι ένας δεδοµένος χώρος θερµαίνεται και η θερµοκρασία στο σηµείο,, Τ, y, z Ας υποθέσουµε ότι ( y z ) αυτού του χώρου δίδεται από
Εισαγωγή στις Τηλεπικοινωνίες. Δομή της παρουσίασης
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΙΡΑΙΩΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΜΗΜΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΤΗΛΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Εισαγωγή στις Τηλεπικοινωνίες Διάλεξη 3 η Τα Συστήματα στις Τηλεπικοινωνίες
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΙΡΑΙΩΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΜΗΜΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΤΗΛΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Εισαγωγή στις Τηλεπικοινωνίες Διάλεξη 3 η Τα Συστήματα στις Τηλεπικοινωνίες
Αριθμητική Ανάλυση και Εφαρμογές
 Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Αριθμητική Ολοκλήρωση Εισαγωγή Έστω ότι η f είναι μία φραγμένη συνάρτηση στο πεπερασμένο
Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Αριθμητική Ολοκλήρωση Εισαγωγή Έστω ότι η f είναι μία φραγμένη συνάρτηση στο πεπερασμένο
ΠΑΝΕΠΙΣΤΗΜΙΟ ΜΑΚΕ ΟΝΙΑΣ ΟΙΚΟΝΟΜΙΚΩΝ ΚΑΙ ΚΟΙΝΩΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΕΦΑΡΜΟΣΜΕΝΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΝΕΥΡΩΝΙΚΑ ΙΚΤΥΑ
 ΘΕΜΑ ο 2.5 µονάδες ΠΑΝΕΠΙΣΤΗΜΙΟ ΜΑΚΕ ΟΝΙΑΣ ΟΙΚΟΝΟΜΙΚΩΝ ΚΑΙ ΚΟΙΝΩΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΕΦΑΡΜΟΣΜΕΝΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΝΕΥΡΩΝΙΚΑ ΙΚΤΥΑ Τελικές εξετάσεις 7 Ιανουαρίου 2005 ιάρκεια εξέτασης: 5:00-8:00 Έστω ότι
ΘΕΜΑ ο 2.5 µονάδες ΠΑΝΕΠΙΣΤΗΜΙΟ ΜΑΚΕ ΟΝΙΑΣ ΟΙΚΟΝΟΜΙΚΩΝ ΚΑΙ ΚΟΙΝΩΝΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΕΦΑΡΜΟΣΜΕΝΗΣ ΠΛΗΡΟΦΟΡΙΚΗΣ ΝΕΥΡΩΝΙΚΑ ΙΚΤΥΑ Τελικές εξετάσεις 7 Ιανουαρίου 2005 ιάρκεια εξέτασης: 5:00-8:00 Έστω ότι
Εισαγωγή στην Τοπολογία
 Ενότητα: Συνεκτικότητα Γεώργιος Κουµουλλής Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε
Ενότητα: Συνεκτικότητα Γεώργιος Κουµουλλής Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε
IV.13 ΔΙΑΦΟΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ 1 ης ΤΑΞΕΩΣ
 IV.3 ΔΙΑΦΟΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ης ΤΑΞΕΩΣ.Γενική λύση.χωριζόμενων μεταβλητών 3.Ρυθμοί 4.Γραμμικές 5.Γραμμική αυτόνομη 6.Bernoulli αυτόνομη 7.Aσυμπτωτικές ιδιότητες 8.Αυτόνομες 9.Σταθερές τιμές.διάγραμμα ροής.ασυμπτωτική
IV.3 ΔΙΑΦΟΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ ης ΤΑΞΕΩΣ.Γενική λύση.χωριζόμενων μεταβλητών 3.Ρυθμοί 4.Γραμμικές 5.Γραμμική αυτόνομη 6.Bernoulli αυτόνομη 7.Aσυμπτωτικές ιδιότητες 8.Αυτόνομες 9.Σταθερές τιμές.διάγραμμα ροής.ασυμπτωτική
Επαναληπτικές Ασκήσεις για το µάθηµα Ψηφιακή Επεξεργασία Σηµάτων
 Άσκηση η α) Πώς θα µετρήσετε πρακτικά πόσο κοντά είναι ένα σήµα σε λευκό θόρυβο; Αναφέρατε 3 διαφορετικές µεθόδους (κριτήρια) για την απόφαση: "Ναι, πρόκειται για σήµα που είναι πολύ κοντά σε λευκό θόρυβο"
Άσκηση η α) Πώς θα µετρήσετε πρακτικά πόσο κοντά είναι ένα σήµα σε λευκό θόρυβο; Αναφέρατε 3 διαφορετικές µεθόδους (κριτήρια) για την απόφαση: "Ναι, πρόκειται για σήµα που είναι πολύ κοντά σε λευκό θόρυβο"
ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ ΕΛΛΗΝΙΚΟ ΑΝΟΙKΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ
 ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ ΕΛΛΗΝΙΚΟ ΑΝΟΙKΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) ΕΡΓΑΣΙΑ 6 η Ηµεροµηνία Αποστολής στον Φοιτητή: 5 Mαίου 8 Ηµεροµηνία Παράδοσης της Εργασίας από
ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ ΕΛΛΗΝΙΚΟ ΑΝΟΙKΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) ΕΡΓΑΣΙΑ 6 η Ηµεροµηνία Αποστολής στον Φοιτητή: 5 Mαίου 8 Ηµεροµηνία Παράδοσης της Εργασίας από
ΣΕΙΡΕΣ TAYLOR. Στην Ενότητα αυτή θα ασχοληθούµε µε την προσέγγιση συναρτήσεων µέσω πολυωνύµων. Πολυώνυµο είναι κάθε συνάρτηση της µορφής:
 ΣΕΙΡΕΣ TAYLOR Στην Ενότητα αυτή θα ασχοληθούµε µε την προσέγγιση συναρτήσεων µέσω πολυωνύµων Πολυώνυµο είναι κάθε συνάρτηση της µορφής: p( ) = a + a + a + a + + a, όπου οι συντελεστές α i θα θεωρούνται
ΣΕΙΡΕΣ TAYLOR Στην Ενότητα αυτή θα ασχοληθούµε µε την προσέγγιση συναρτήσεων µέσω πολυωνύµων Πολυώνυµο είναι κάθε συνάρτηση της µορφής: p( ) = a + a + a + a + + a, όπου οι συντελεστές α i θα θεωρούνται
ΚΕΦΑΛΑΙΟ 4 ΑΡΙΘΜΗΤΙΚΕΣ ΜΕΘΟ ΟΙ ΕΥΡΕΣΗΣ ΠΡΑΓΜΑΤΙΚΩΝ Ι ΙΟΤΙΜΩΝ. 4.1 Γραµµικοί µετασχηµατισµοί-ιδιοτιµές-ιδιοδιανύσµατα
 ΚΕΦΑΛΑΙΟ 4 ΑΡΙΘΜΗΤΙΚΕΣ ΜΕΘΟ ΟΙ ΕΥΡΕΣΗΣ ΠΡΑΓΜΑΤΙΚΩΝ Ι ΙΟΤΙΜΩΝ 4. Γραµµικοί µετασχηµατισµοί-ιδιοτιµές-ιδιοδιανύσµατα Εστω R είναι ο γνωστός -διάστατος πραγµατικός διανυσµατικός χώρος. Μία απεικόνιση L :
ΚΕΦΑΛΑΙΟ 4 ΑΡΙΘΜΗΤΙΚΕΣ ΜΕΘΟ ΟΙ ΕΥΡΕΣΗΣ ΠΡΑΓΜΑΤΙΚΩΝ Ι ΙΟΤΙΜΩΝ 4. Γραµµικοί µετασχηµατισµοί-ιδιοτιµές-ιδιοδιανύσµατα Εστω R είναι ο γνωστός -διάστατος πραγµατικός διανυσµατικός χώρος. Μία απεικόνιση L :
Σήματα και Συστήματα. Διάλεξη 1: Σήματα Συνεχούς Χρόνου. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 1: Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Εισαγωγή στα Σήματα 1. Σκοποί της Θεωρίας Σημάτων 2. Κατηγορίες Σημάτων 3. Χαρακτηριστικές Παράμετροι
Σήματα και Συστήματα Διάλεξη 1: Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Εισαγωγή στα Σήματα 1. Σκοποί της Θεωρίας Σημάτων 2. Κατηγορίες Σημάτων 3. Χαρακτηριστικές Παράμετροι
Αριθµητική Ανάλυση 1 εκεµβρίου / 43
 Αριθµητική Ανάλυση 1 εκεµβρίου 2014 Αριθµητική Ανάλυση 1 εκεµβρίου 2014 1 / 43 Κεφ.5. Αριθµητικός Υπολογισµός Ιδιοτιµών και Ιδιοδιανυσµάτων ίνεται ένας πίνακας A C n n και Ϲητούνται να προσδιορισθούν οι
Αριθµητική Ανάλυση 1 εκεµβρίου 2014 Αριθµητική Ανάλυση 1 εκεµβρίου 2014 1 / 43 Κεφ.5. Αριθµητικός Υπολογισµός Ιδιοτιµών και Ιδιοδιανυσµάτων ίνεται ένας πίνακας A C n n και Ϲητούνται να προσδιορισθούν οι
ΙΙ ιαφορικός Λογισµός πολλών µεταβλητών. ιαφόριση συναρτήσεων πολλών µεταβλητών
 54 ΙΙ ιαφορικός Λογισµός πολλών µεταβλητών ιαφόριση συναρτήσεων πολλών µεταβλητών Ένας στέρεος ορισµός της παραγώγισης για συναρτήσεις πολλών µεταβλητών ανάλογος µε τον ορισµό για συναρτήσεις µιας µεταβλητής
54 ΙΙ ιαφορικός Λογισµός πολλών µεταβλητών ιαφόριση συναρτήσεων πολλών µεταβλητών Ένας στέρεος ορισµός της παραγώγισης για συναρτήσεις πολλών µεταβλητών ανάλογος µε τον ορισµό για συναρτήσεις µιας µεταβλητής
Κεφ. 7: Συνήθεις διαφορικές εξισώσεις (ΣΔΕ) - προβλήματα αρχικών τιμών
 - προβλήματα αρχικών τιμών") Κεφ. 7: Συνήθεις διαφορικές εξισώσεις (ΣΔΕ) - προβλήματα αρχικών τιμών 7. Εισαγωγή (ορισμός προβλήματος, αριθμητική ολοκλήρωση ΣΔΕ, αντικατάσταση ΣΔΕ τάξης n με n εξισώσεις ης τάξης) 7. Μέθοδος Euler 7.3
Κεφ. 7: Συνήθεις διαφορικές εξισώσεις (ΣΔΕ) - προβλήματα αρχικών τιμών 7. Εισαγωγή (ορισμός προβλήματος, αριθμητική ολοκλήρωση ΣΔΕ, αντικατάσταση ΣΔΕ τάξης n με n εξισώσεις ης τάξης) 7. Μέθοδος Euler 7.3
Πανεπιστήμιο Αθηνών Τμήμα Φυσικής Κβαντομηχανική ΙΙ
 Πανεπιστήμιο Αθηνών Τμήμα Φυσικής Κβαντομηχανική ΙΙ Χρονικά Ανεξάρτητη Θεωρία Διαταραχών. Τα περισσότερα φυσικά συστήματα που έχομε προσεγγίσει μέχρι τώρα περιγράφονται από μία κύρια Χαμιλτονιανή η οποία
Πανεπιστήμιο Αθηνών Τμήμα Φυσικής Κβαντομηχανική ΙΙ Χρονικά Ανεξάρτητη Θεωρία Διαταραχών. Τα περισσότερα φυσικά συστήματα που έχομε προσεγγίσει μέχρι τώρα περιγράφονται από μία κύρια Χαμιλτονιανή η οποία
Συνήθεις διαφορικές εξισώσεις προβλήματα οριακών τιμών
 Συνήθεις διαφορικές εξισώσεις προβλήματα οριακών τιμών Οι παρούσες σημειώσεις αποτελούν βοήθημα στο μάθημα Αριθμητικές Μέθοδοι του 5 ου εξαμήνου του ΤΜΜ ημήτρης Βαλουγεώργης Καθηγητής Εργαστήριο Φυσικών
Συνήθεις διαφορικές εξισώσεις προβλήματα οριακών τιμών Οι παρούσες σημειώσεις αποτελούν βοήθημα στο μάθημα Αριθμητικές Μέθοδοι του 5 ου εξαμήνου του ΤΜΜ ημήτρης Βαλουγεώργης Καθηγητής Εργαστήριο Φυσικών
Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος
 Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος Χιωτίδης Γεώργιος Τμήμα Λογιστικής και Χρηματοοικονομικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
Ποσοτικές Μέθοδοι στη Διοίκηση Επιχειρήσεων ΙΙ Σύνολο- Περιεχόμενο Μαθήματος Χιωτίδης Γεώργιος Τμήμα Λογιστικής και Χρηματοοικονομικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ
 ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) Ενδεικτικές Λύσεις ΕΡΓΑΣΙΑ η Ηµεροµηνία Αποστολής στον Φοιτητή: Ιανουαρίου 6 Ηµεροµηνία Παράδοσης της Εργασίας από
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) Ενδεικτικές Λύσεις ΕΡΓΑΣΙΑ η Ηµεροµηνία Αποστολής στον Φοιτητή: Ιανουαρίου 6 Ηµεροµηνία Παράδοσης της Εργασίας από
µηδενικό πολυώνυµο; Τι ονοµάζουµε βαθµό του πολυωνύµου; Πότε δύο πολυώνυµα είναι ίσα;
 ΘΕΩΡΙΑ ΠΟΛΥΩΝΥΜΩΝ 1. Τι ονοµάζουµε µονώνυµο Μονώνυµο ονοµάζεται κάθε γινόµενο το οποίο αποτελείται από γνωστούς και αγνώστους (µεταβλητές ) πραγµατικούς αριθµούς. Ο γνωστός πραγµατικός αριθµός ονοµάζεται
ΘΕΩΡΙΑ ΠΟΛΥΩΝΥΜΩΝ 1. Τι ονοµάζουµε µονώνυµο Μονώνυµο ονοµάζεται κάθε γινόµενο το οποίο αποτελείται από γνωστούς και αγνώστους (µεταβλητές ) πραγµατικούς αριθµούς. Ο γνωστός πραγµατικός αριθµός ονοµάζεται
Ο Μετασχηματισμός Ζ. Ανάλυση συστημάτων με το μετασχηματισμό Ζ
 Ο Μετασχηματισμός Ζ Ανάλυση συστημάτων με το μετασχηματισμό Ζ Ο μετασχηματισμός Z (Ζ-Τransform: ZT) χρήσιμο μαθηματικό εργαλείο για την ανάλυση των διακριτών σημάτων και συστημάτων αποτελεί ό,τι ο μετασχηματισμός
Ο Μετασχηματισμός Ζ Ανάλυση συστημάτων με το μετασχηματισμό Ζ Ο μετασχηματισμός Z (Ζ-Τransform: ZT) χρήσιμο μαθηματικό εργαλείο για την ανάλυση των διακριτών σημάτων και συστημάτων αποτελεί ό,τι ο μετασχηματισμός
Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο
 Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο Σύνοψη Στο κεφάλαιο αυτό παρουσιάζεται η ιδέα του συμπτωτικού πολυωνύμου, του πολυωνύμου, δηλαδή, που είναι του μικρότερου δυνατού βαθμού και που, για συγκεκριμένες,
Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο Σύνοψη Στο κεφάλαιο αυτό παρουσιάζεται η ιδέα του συμπτωτικού πολυωνύμου, του πολυωνύμου, δηλαδή, που είναι του μικρότερου δυνατού βαθμού και που, για συγκεκριμένες,
Ευστάθεια Συστηµάτων Αυτοµάτου Ελέγχου: Αλγεβρικά κριτήρια
 ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Ευστάθεια Συστηµάτων Αυτοµάτου Ελέγχου: Αλγεβρικά κριτήρια 6 Nicol Tptouli Ευστάθεια και θέση πόλων Σ.Α.Ε ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος
ΚΕΣ : Αυτόµατος Έλεγχος ΚΕΣ Αυτόµατος Έλεγχος Ευστάθεια Συστηµάτων Αυτοµάτου Ελέγχου: Αλγεβρικά κριτήρια 6 Nicol Tptouli Ευστάθεια και θέση πόλων Σ.Α.Ε ΚΕΣ : Αυτόµατος Έλεγχος Βιβλιογραφία Ενότητας Παρασκευόπουλος
Κεφάλαιο M4. Κίνηση σε δύο διαστάσεις
 Κεφάλαιο M4 Κίνηση σε δύο διαστάσεις Κινηµατική σε δύο διαστάσεις Θα περιγράψουµε τη διανυσµατική φύση της θέσης, της ταχύτητας, και της επιτάχυνσης µε περισσότερες λεπτοµέρειες. Θα µελετήσουµε την κίνηση
Κεφάλαιο M4 Κίνηση σε δύο διαστάσεις Κινηµατική σε δύο διαστάσεις Θα περιγράψουµε τη διανυσµατική φύση της θέσης, της ταχύτητας, και της επιτάχυνσης µε περισσότερες λεπτοµέρειες. Θα µελετήσουµε την κίνηση
Markov. Γ. Κορίλη, Αλυσίδες. Αλυσίδες Markov
 Γ. Κορίλη, Αλυσίδες Markov 3- http://www.seas.upe.edu/~tcom5/lectures/lecture3.pdf Αλυσίδες Markov Αλυσίδες Markov ιακριτού Χρόνου Υπολογισµός Στάσιµης Κατανοµής Εξισώσεις Ολικού Ισοζυγίου Εξισώσεις Λεπτοµερούς
Γ. Κορίλη, Αλυσίδες Markov 3- http://www.seas.upe.edu/~tcom5/lectures/lecture3.pdf Αλυσίδες Markov Αλυσίδες Markov ιακριτού Χρόνου Υπολογισµός Στάσιµης Κατανοµής Εξισώσεις Ολικού Ισοζυγίου Εξισώσεις Λεπτοµερούς
Χρονοσειρές - Μάθημα 8. Μη-γραμμική ανάλυση χρονοσειρών
 Χρονοσειρές - Μάθημα 8 Μη-γραμμική ανάλυση χρονοσειρών Γραμμική ανάλυση / Γραμμικά μοντέλα αυτοσυσχέτιση AR μοντέλο ARMA(,q) μοντέλο x x x z z z q q Πλεονεκτήματα:. Απλά. Κανονική διαδικασία, ανεπτυγμένη
Χρονοσειρές - Μάθημα 8 Μη-γραμμική ανάλυση χρονοσειρών Γραμμική ανάλυση / Γραμμικά μοντέλα αυτοσυσχέτιση AR μοντέλο ARMA(,q) μοντέλο x x x z z z q q Πλεονεκτήματα:. Απλά. Κανονική διαδικασία, ανεπτυγμένη
Χρονικές σειρές 2 Ο μάθημα: Εισαγωγή στις χρονοσειρές
 Χρονικές σειρές 2 Ο μάθημα: Εισαγωγή στις χρονοσειρές Εαρινό εξάμηνο 2018-2019 μήμα Μαθηματικών ΑΠΘ Διδάσκουσα: Αγγελική Παπάνα Μεταδιδακτορική Ερευνήτρια Πολυτεχνική σχολή, Α.Π.Θ. & Οικονομικό μήμα, Πανεπιστήμιο
Χρονικές σειρές 2 Ο μάθημα: Εισαγωγή στις χρονοσειρές Εαρινό εξάμηνο 2018-2019 μήμα Μαθηματικών ΑΠΘ Διδάσκουσα: Αγγελική Παπάνα Μεταδιδακτορική Ερευνήτρια Πολυτεχνική σχολή, Α.Π.Θ. & Οικονομικό μήμα, Πανεπιστήμιο
ΜΕΓΙΣΤΙΚΟΣ ΤΕΛΕΣΤΗΣ 18 Σεπτεμβρίου 2014
 ΜΕΓΙΣΤΙΚΟΣ ΤΕΛΕΣΤΗΣ 18 Σεπτεμβρίου 2014 Περιεχόμενα 1 Εισαγωγή 2 2 Μεγιστικός τελέστης στην μπάλα 2 2.1 Βασικό θεώρημα........................ 2 2.2 Γενική περίπτωση μπάλας.................. 6 2.2.1 Στο
ΜΕΓΙΣΤΙΚΟΣ ΤΕΛΕΣΤΗΣ 18 Σεπτεμβρίου 2014 Περιεχόμενα 1 Εισαγωγή 2 2 Μεγιστικός τελέστης στην μπάλα 2 2.1 Βασικό θεώρημα........................ 2 2.2 Γενική περίπτωση μπάλας.................. 6 2.2.1 Στο
ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ ΙΙ (ΠΕΡΙΤΤΟΙ) Ασκησεις - Φυλλαδιο 5
 Ασκησεις - Φυλλαδιο 5") ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ ΙΙ Τµηµα Β (ΠΕΡΙΤΤΟΙ) Ασκησεις - Φυλλαδιο 5 ιδασκων: Α Μπεληγιάννης Ιστοσελιδα Μαθηµατος : http://usersuoigr/abeligia/linearalgebraii/laii018/laii018html ευτέρα 3 Απριλίου 018 Αν C = x
ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ ΙΙ Τµηµα Β (ΠΕΡΙΤΤΟΙ) Ασκησεις - Φυλλαδιο 5 ιδασκων: Α Μπεληγιάννης Ιστοσελιδα Μαθηµατος : http://usersuoigr/abeligia/linearalgebraii/laii018/laii018html ευτέρα 3 Απριλίου 018 Αν C = x
Μεταπτυχιακό Πρόγραμμα Φυσικού Τμήματος «Υπολογιστική Φυσική» Θέμα εργασίας στο A Μέρος του μαθήματος «Προσομοίωση Χαοτικών Συστημάτων»
 Μεταπτυχιακό Πρόγραμμα Φυσικού Τμήματος «Υπολογιστική Φυσική» Θέμα εργασίας στο A Μέρος του μαθήματος «Προσομοίωση Χαοτικών Συστημάτων» Οδηγίες: Σχετικά με την παράδοση της εργασίας θα πρέπει: Το κείμενο
Μεταπτυχιακό Πρόγραμμα Φυσικού Τμήματος «Υπολογιστική Φυσική» Θέμα εργασίας στο A Μέρος του μαθήματος «Προσομοίωση Χαοτικών Συστημάτων» Οδηγίες: Σχετικά με την παράδοση της εργασίας θα πρέπει: Το κείμενο
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ
 ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ «ΠΛΗΡΟΦΟΡΙΚΗ» ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) TEΛΙΚΕΣ ΕΞΕΤΑΣΕΙΣ 4 Ιουνίου 7 Από τα κάτωθι Θέµατα καλείστε να λύσετε το ο που περιλαµβάνει ερωτήµατα από όλη την ύλη
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ «ΠΛΗΡΟΦΟΡΙΚΗ» ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) TEΛΙΚΕΣ ΕΞΕΤΑΣΕΙΣ 4 Ιουνίου 7 Από τα κάτωθι Θέµατα καλείστε να λύσετε το ο που περιλαµβάνει ερωτήµατα από όλη την ύλη
Χρονικές σειρές 5 Ο μάθημα: Γραμμικά στοχαστικά μοντέλα (1) Αυτοπαλίνδρομα μοντέλα Εαρινό εξάμηνο Τμήμα Μαθηματικών ΑΠΘ
 Αυτοπαλίνδρομα μοντέλα Εαρινό εξάμηνο Τμήμα Μαθηματικών ΑΠΘ") Χρονικές σειρές 5 Ο μάθημα: Γραμμικά στοχαστικά μοντέλα (1) Αυτοπαλίνδρομα μοντέλα Εαρινό εξάμηνο 2018-2019 Τμήμα Μαθηματικών ΑΠΘ Διδάσκουσα: Αγγελική Παπάνα Μεταδιδακτορική Ερευνήτρια Πολυτεχνική σχολή,
Χρονικές σειρές 5 Ο μάθημα: Γραμμικά στοχαστικά μοντέλα (1) Αυτοπαλίνδρομα μοντέλα Εαρινό εξάμηνο 2018-2019 Τμήμα Μαθηματικών ΑΠΘ Διδάσκουσα: Αγγελική Παπάνα Μεταδιδακτορική Ερευνήτρια Πολυτεχνική σχολή,
Θεωρία Τελεστών. Ενότητα: Χώροι µε νόρµα - Χώροι Hilbert. Αριστείδης Κατάβολος. Τµήµα Μαθηµατικών
 Ενότητα: Χώροι µε νόρµα - Χώροι Hilbert Αριστείδης Κατάβολος Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες,
Ενότητα: Χώροι µε νόρµα - Χώροι Hilbert Αριστείδης Κατάβολος Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons. Για εκπαιδευτικό υλικό, όπως εικόνες,
x(t) 2 = e 2 t = e 2t, t > 0
 2 = e 2 t = e 2t, t > 0") ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Τµήµα Επιστήµης Υπολογιστών HY-215: Εφαρµοσµένα Μαθηµατικά για Μηχανικούς Εαρινό Εξάµηνο 216-17 ιδάσκοντες : Γ. Στυλιανού, Γ. Καφεντζής Λυµένες Ασκήσεις σε Σήµατα και Συστήµατα Ασκηση
ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Τµήµα Επιστήµης Υπολογιστών HY-215: Εφαρµοσµένα Μαθηµατικά για Μηχανικούς Εαρινό Εξάµηνο 216-17 ιδάσκοντες : Γ. Στυλιανού, Γ. Καφεντζής Λυµένες Ασκήσεις σε Σήµατα και Συστήµατα Ασκηση
Μάθηµα 1. Κεφάλαιο 1o: Συστήµατα. γ R παριστάνει ευθεία και καλείται γραµµική εξίσωση µε δύο αγνώστους.
 Μάθηµα 1 Κεφάλαιο 1o: Συστήµατα Θεµατικές Ενότητες: A. Συστήµατα Γραµµικών Εξισώσεων B. Συστήµατα 3x3 Α. ΣΥΣΤΗΜΑΤΑ ΓΡΑΜΜΙΚΩΝ ΕΞΙΣΩΣΕΩΝ Ορισµοί Κάθε εξίσωση της µορφής α x+β =γ, µε α, β, γ R παριστάνει
Μάθηµα 1 Κεφάλαιο 1o: Συστήµατα Θεµατικές Ενότητες: A. Συστήµατα Γραµµικών Εξισώσεων B. Συστήµατα 3x3 Α. ΣΥΣΤΗΜΑΤΑ ΓΡΑΜΜΙΚΩΝ ΕΞΙΣΩΣΕΩΝ Ορισµοί Κάθε εξίσωση της µορφής α x+β =γ, µε α, β, γ R παριστάνει
Παρουσίαση 2 η : Αρχές εκτίμησης παραμέτρων Μέρος 1 ο
 Εφαρμογές Ανάλυσης Σήματος στη Γεωδαισία Παρουσίαση η : Αρχές εκτίμησης παραμέτρων Μέρος ο Βασίλειος Δ. Ανδριτσάνος Αναπληρωτής Καθηγητής Γεώργιος Χλούπης Επίκουρος Καθηγητής Τμήμα Μηχανικών Τοπογραφίας
Εφαρμογές Ανάλυσης Σήματος στη Γεωδαισία Παρουσίαση η : Αρχές εκτίμησης παραμέτρων Μέρος ο Βασίλειος Δ. Ανδριτσάνος Αναπληρωτής Καθηγητής Γεώργιος Χλούπης Επίκουρος Καθηγητής Τμήμα Μηχανικών Τοπογραφίας
(2) Θεωρούµε µοναδιαία διανύσµατα α, β, γ R 3, για τα οποία γνωρίζουµε ότι το διάνυσµα
 Θεωρούµε µοναδιαία διανύσµατα α, β, γ R 3, για τα οποία γνωρίζουµε ότι το διάνυσµα") Πανεπιστηµιο Ιωαννινων σχολη θετικων επιστηµων τµηµα µαθηµατικων τοµεας αλγεβρας και γεωµετριας αναλυτικη γεωµετρια διδασκων : χρηστος κ. τατακης υποδειξεις λυσεων των θεµατων της 7.06.016 ΘΕΜΑ 1. µονάδες
Πανεπιστηµιο Ιωαννινων σχολη θετικων επιστηµων τµηµα µαθηµατικων τοµεας αλγεβρας και γεωµετριας αναλυτικη γεωµετρια διδασκων : χρηστος κ. τατακης υποδειξεις λυσεων των θεµατων της 7.06.016 ΘΕΜΑ 1. µονάδες
Συνήθεις Διαφορικές Εξισώσεις
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ Μεταπτυχιακό Μάθημα: Συνήθεις Διαφορικές Εξισώσεις Καθηγητές: Α Μπούντης - Σ Πνευματικός Ακαδημαϊκό έτος 11-1 ΕΞΕΤΑΣΗ ΙΟΥΝΙΟΥ ΤΟ ΜΑΘΗΜΑΤΙΚΟ ΠΡΟΤΥΠΟ ΤΩΝ LOKA-VOLERRA
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΑΘΗΜΑΤΙΚΩΝ Μεταπτυχιακό Μάθημα: Συνήθεις Διαφορικές Εξισώσεις Καθηγητές: Α Μπούντης - Σ Πνευματικός Ακαδημαϊκό έτος 11-1 ΕΞΕΤΑΣΗ ΙΟΥΝΙΟΥ ΤΟ ΜΑΘΗΜΑΤΙΚΟ ΠΡΟΤΥΠΟ ΤΩΝ LOKA-VOLERRA
Σχολικός Σύµβουλος ΠΕ03
 Ασκήσεις Μαθηµατικών Θετικής & Τεχνολογικής Κατεύθυνσης Γ Λυκείου ρ. Παναγιώτης Λ. Θεοδωρόπουλος Σχολικός Σύµβουλος ΠΕ03 e-mail@p-theodoropoulos.gr Στην εργασία αυτή ξεχωρίζουµε και µελετάµε µερικές περιπτώσεις
Ασκήσεις Μαθηµατικών Θετικής & Τεχνολογικής Κατεύθυνσης Γ Λυκείου ρ. Παναγιώτης Λ. Θεοδωρόπουλος Σχολικός Σύµβουλος ΠΕ03 e-mail@p-theodoropoulos.gr Στην εργασία αυτή ξεχωρίζουµε και µελετάµε µερικές περιπτώσεις
Πρακτική µε στοιχεία στατιστικής ανάλυσης
 Πρακτική µε στοιχεία στατιστικής ανάλυσης 1. Για να υπολογίσουµε µια ποσότητα q = x 2 y xy 2, µετρήσαµε τα µεγέθη x και y και βρήκαµε x = 3.0 ± 0.1και y = 2.0 ± 0.1. Να βρεθεί η ποσότητα q και η αβεβαιότητά
Πρακτική µε στοιχεία στατιστικής ανάλυσης 1. Για να υπολογίσουµε µια ποσότητα q = x 2 y xy 2, µετρήσαµε τα µεγέθη x και y και βρήκαµε x = 3.0 ± 0.1και y = 2.0 ± 0.1. Να βρεθεί η ποσότητα q και η αβεβαιότητά
Σήματα και Συστήματα. Διάλεξη 7: Μετασχηματισμός Fourier. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 7: Μετασχηματισμός Fourier Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μετασχηματισμός Fourier 1. Ορισμός του Μετασχηματισμού Fourier 2. Φυσική Σημασία του Μετασχηματισμού
Σήματα και Συστήματα Διάλεξη 7: Μετασχηματισμός Fourier Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μετασχηματισμός Fourier 1. Ορισμός του Μετασχηματισμού Fourier 2. Φυσική Σημασία του Μετασχηματισμού
1.1. Διαφορική Εξίσωση και λύση αυτής
 Εισαγωγή στις συνήθεις διαφορικές εξισώσεις 9 Διαφορική Εξίσωση και λύση αυτής Σε ότι ακολουθεί με τον όρο συνάρτηση θα εννοούμε μια πραγματική συνάρτηση μιας πραγματικής μεταβλητής, ορισμένη σε ένα διάστημα
Εισαγωγή στις συνήθεις διαφορικές εξισώσεις 9 Διαφορική Εξίσωση και λύση αυτής Σε ότι ακολουθεί με τον όρο συνάρτηση θα εννοούμε μια πραγματική συνάρτηση μιας πραγματικής μεταβλητής, ορισμένη σε ένα διάστημα
Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα:
, έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα:") 1 Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα: Όπου Κ R α) Να βρεθεί η περιγραφή στο χώρο κατάστασης και η συνάρτηση
1 Άσκηση: Ένα σύστηµα µε είσοδο u(t), έξοδο y(t) και διάνυσµα κατάστασης x(t) = (x 1 (t) x 2 (t)) T περιγράφεται από το ακόλουθο διάγραµµα: Όπου Κ R α) Να βρεθεί η περιγραφή στο χώρο κατάστασης και η συνάρτηση
Η τροχιά του δυναµικού συστήµατος µε αρχική συνθήκη X γράφεται
 Απόδειξη Θεωρήµατος Poincare-Bendixson Το δυναµικό σύστηµα είναι στο επίπεδο, προσδιορίζεται από το διάνυσµατικό πεδίο ταχυτήτων v(x), και οι τροχιές ικανοποιούν την δυνα- µική: ẋ = v(x). Η τροχιά του
Απόδειξη Θεωρήµατος Poincare-Bendixson Το δυναµικό σύστηµα είναι στο επίπεδο, προσδιορίζεται από το διάνυσµατικό πεδίο ταχυτήτων v(x), και οι τροχιές ικανοποιούν την δυνα- µική: ẋ = v(x). Η τροχιά του
e-mail@p-theodoropoulos.gr
 Ασκήσεις Μαθηµατικών Κατεύθυνσης Γ Λυκείου Παναγιώτης Λ. Θεοδωρόπουλος Σχολικός Σύµβουλος Μαθηµατικών e-mail@p-theodoropoulos.gr Στην εργασία αυτή ξεχωρίζουµε και µελετάµε µερικές περιπτώσεις ασκήσεων
Ασκήσεις Μαθηµατικών Κατεύθυνσης Γ Λυκείου Παναγιώτης Λ. Θεοδωρόπουλος Σχολικός Σύµβουλος Μαθηµατικών e-mail@p-theodoropoulos.gr Στην εργασία αυτή ξεχωρίζουµε και µελετάµε µερικές περιπτώσεις ασκήσεων
Η ΤΕΧΝΗ ΤΟΥ ΙΑΒΑΣΜΑΤΟΣ ΜΕΤΑΞΥ ΤΩΝ ΑΡΙΘΜΩΝ (ΠΑΡΕΜΒΟΛΗ ΚΑΙ ΠΡΟΣΕΓΓΙΣΗ)
") Η ΤΕΧΝΗ ΤΟΥ ΙΑΒΑΣΜΑΤΟΣ ΜΕΤΑΞΥ ΤΩΝ ΑΡΙΘΜΩΝ (ΠΑΡΕΜΒΟΛΗ ΚΑΙ ΠΡΟΣΕΓΓΙΣΗ) ΜΙΧΑΛΗΣ ΤΖΟΥΜΑΣ ΕΣΠΟΤΑΤΟΥ 3 ΑΓΡΙΝΙΟ. ΠΕΡΙΛΗΨΗ Η έννοια της συνάρτησης είναι στενά συνυφασµένη µε τον πίνακα τιµών και τη γραφική παράσταση.
Η ΤΕΧΝΗ ΤΟΥ ΙΑΒΑΣΜΑΤΟΣ ΜΕΤΑΞΥ ΤΩΝ ΑΡΙΘΜΩΝ (ΠΑΡΕΜΒΟΛΗ ΚΑΙ ΠΡΟΣΕΓΓΙΣΗ) ΜΙΧΑΛΗΣ ΤΖΟΥΜΑΣ ΕΣΠΟΤΑΤΟΥ 3 ΑΓΡΙΝΙΟ. ΠΕΡΙΛΗΨΗ Η έννοια της συνάρτησης είναι στενά συνυφασµένη µε τον πίνακα τιµών και τη γραφική παράσταση.
Μεθοδολογίες παρεµβολής σε DTM.
 Μάθηµα : Αλγοριθµικές Βάσεις στη Γεωπληροφορική ιδάσκων : Συµεών Κατσουγιαννόπουλος Μεθοδολογίες παρεµβολής σε DTM.. Μέθοδοι παρεµβολής. Η παρεµβολή σε ψηφιακό µοντέλο εδάφους (DTM) είναι η διαδικασία
Μάθηµα : Αλγοριθµικές Βάσεις στη Γεωπληροφορική ιδάσκων : Συµεών Κατσουγιαννόπουλος Μεθοδολογίες παρεµβολής σε DTM.. Μέθοδοι παρεµβολής. Η παρεµβολή σε ψηφιακό µοντέλο εδάφους (DTM) είναι η διαδικασία
Κανόνες παραγώγισης ( )
") 66 Κανόνες παραγώγισης Οι κανόνες παραγώγισης που ισχύουν για συναρτήσεις µιας µεταβλητής, ( παραγώγιση, αθροίσµατος, γινοµένου, πηλίκου και σύνθετων συναρτήσεων ) γενικεύονται και για συναρτήσεις πολλών
66 Κανόνες παραγώγισης Οι κανόνες παραγώγισης που ισχύουν για συναρτήσεις µιας µεταβλητής, ( παραγώγιση, αθροίσµατος, γινοµένου, πηλίκου και σύνθετων συναρτήσεων ) γενικεύονται και για συναρτήσεις πολλών
Πραγματικές χρονοσειρές
 3. 4.. 5... Γενικά για χρονοσειρές (πειραματικά δεδομένα και θόρυβος). Ανακατασκευή χώρου φάσεων 3. Υπολογισμός διάστασης χαοτικών ελκυστών 4. Υπολογισμός εκθετών Lyapunov 5. Μέθοδοι πρόβλεψης φυσιολογία
3. 4.. 5... Γενικά για χρονοσειρές (πειραματικά δεδομένα και θόρυβος). Ανακατασκευή χώρου φάσεων 3. Υπολογισμός διάστασης χαοτικών ελκυστών 4. Υπολογισμός εκθετών Lyapunov 5. Μέθοδοι πρόβλεψης φυσιολογία
Αρµονική Ανάλυση. Ενότητα: Το ϑεώρηµα παρεµβολής του Riesz και η ανισότητα Hausdorff-Young. Απόστολος Γιαννόπουλος.
 Ενότητα: Το ϑεώρηµα παρεµβολής του Riesz και η ανισότητα Hausdorff-Young Απόστολος Γιαννόπουλος Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons.
Ενότητα: Το ϑεώρηµα παρεµβολής του Riesz και η ανισότητα Hausdorff-Young Απόστολος Γιαννόπουλος Τµήµα Μαθηµατικών Αδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons.
11 Το ολοκλήρωµα Riemann
 Το ολοκλήρωµα Riem Το πρόβληµα υπολογισµού του εµβαδού οποιασδήποτε επιφάνειας ( όπως κυκλικοί τοµείς, δακτύλιοι και δίσκοι, ελλειπτικοί δίσκοι, παραβολικά και υπερβολικά χωρία κτλ) είναι γνωστό από την
Το ολοκλήρωµα Riem Το πρόβληµα υπολογισµού του εµβαδού οποιασδήποτε επιφάνειας ( όπως κυκλικοί τοµείς, δακτύλιοι και δίσκοι, ελλειπτικοί δίσκοι, παραβολικά και υπερβολικά χωρία κτλ) είναι γνωστό από την
Κεφ. 6Β: Συνήθεις διαφορικές εξισώσεις (ΣΔΕ) - προβλήματα αρχικών τιμών
 - προβλήματα αρχικών τιμών") Κεφ. 6Β: Συνήθεις διαφορικές εξισώσεις (ΣΔΕ) - προβλήματα αρχικών τιμών. Εισαγωγή (ορισμός προβλήματος, αριθμητική ολοκλήρωση ΣΔΕ, αντικατάσταση ΣΔΕ τάξης n με n εξισώσεις ης τάξης). Μέθοδος Euler 3. Μέθοδοι
Κεφ. 6Β: Συνήθεις διαφορικές εξισώσεις (ΣΔΕ) - προβλήματα αρχικών τιμών. Εισαγωγή (ορισμός προβλήματος, αριθμητική ολοκλήρωση ΣΔΕ, αντικατάσταση ΣΔΕ τάξης n με n εξισώσεις ης τάξης). Μέθοδος Euler 3. Μέθοδοι
Μερικές φορές δεν μπορούμε να αποφανθούμε για την τιμή του άπειρου αθροίσματος.
 Σειρές Σειρές και μερικά αθροίσματα: Το πρόβλημα της άθροισης μιας σειράς άπειρων όρων είναι πολύ παλιό. Μερικές φορές μια τέτοια σειρά καταλήγει σε πεπερασμένο αποτέλεσμα, μερικές φορές απειρίζεται και
Σειρές Σειρές και μερικά αθροίσματα: Το πρόβλημα της άθροισης μιας σειράς άπειρων όρων είναι πολύ παλιό. Μερικές φορές μια τέτοια σειρά καταλήγει σε πεπερασμένο αποτέλεσμα, μερικές φορές απειρίζεται και
Αριθµητική Γραµµική ΑλγεβραΚεφάλαιο 4. Αριθµητικός Υπολογισµός Ιδιοτιµών 2 Απριλίου και2015 Ιδιοδιανυσµάτων 1 / 50
 Αριθµητική Γραµµική Αλγεβρα Κεφάλαιο 4. Αριθµητικός Υπολογισµός Ιδιοτιµών και Ιδιοδιανυσµάτων ΕΚΠΑ 2 Απριλίου 205 Αριθµητική Γραµµική ΑλγεβραΚεφάλαιο 4. Αριθµητικός Υπολογισµός Ιδιοτιµών 2 Απριλίου και205
Αριθµητική Γραµµική Αλγεβρα Κεφάλαιο 4. Αριθµητικός Υπολογισµός Ιδιοτιµών και Ιδιοδιανυσµάτων ΕΚΠΑ 2 Απριλίου 205 Αριθµητική Γραµµική ΑλγεβραΚεφάλαιο 4. Αριθµητικός Υπολογισµός Ιδιοτιµών 2 Απριλίου και205
ΕΡΓΑΣΤΗΡΙΟ ΦΥΣΙΚΗΣ ΟΠΤΙΚΗΣ - ΟΠΤΟΗΛΕΚΤΡΟΝΙΚΗΣ & LASER ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΧΗΜΕΙΑΣ & Τ/Υ ΑΣΚΗΣΗ ΝΟ7 ΟΠΤΙΚΗ FOURIER. Γ. Μήτσου
 ΕΡΓΑΣΗΡΙΟ ΦΥΣΙΚΗΣ ΟΠΙΚΗΣ - ΟΠΟΗΛΕΚΡΟΝΙΚΗΣ & LASER ΜΗΜΑ ΦΥΣΙΚΗΣ ΧΗΜΕΙΑΣ & /Υ ΑΣΚΗΣΗ ΝΟ7 ΟΠΙΚΗ FOURIER Γ. Μήτσου Μάρτιος 8 Α. Θεωρία. Εισαγωγή Η επεξεργασία οπτικών δεδοµένων, το φιλτράρισµα χωρικών συχνοτήτων
ΕΡΓΑΣΗΡΙΟ ΦΥΣΙΚΗΣ ΟΠΙΚΗΣ - ΟΠΟΗΛΕΚΡΟΝΙΚΗΣ & LASER ΜΗΜΑ ΦΥΣΙΚΗΣ ΧΗΜΕΙΑΣ & /Υ ΑΣΚΗΣΗ ΝΟ7 ΟΠΙΚΗ FOURIER Γ. Μήτσου Μάρτιος 8 Α. Θεωρία. Εισαγωγή Η επεξεργασία οπτικών δεδοµένων, το φιλτράρισµα χωρικών συχνοτήτων
Δυναμική Μηχανών I. Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις. Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές
 Δυναμική Μηχανών I Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις 5 3 Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com
Δυναμική Μηχανών I Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις 5 3 Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com
ΑΠΑΝΤΗΣΕΙΣ - ΥΠΟ ΕΙΞΕΙΣ ΣΤΙΣ ΕΡΩΤΗΣΕΙΣ
 ΑΠΑΝΤΗΣΕΙΣ - ΥΠΟ ΕΙΞΕΙΣ ΣΤΙΣ ΕΡΩΤΗΣΕΙΣ 36 Κεφάλαιο 3ο: ΟΛΟΚΛΗΡΩΤΙΚΟΣ ΛΟΓΙΣΜΟΣ Απαντήσεις στις ερωτήσεις του τύπου Σωστό-Λάθος. Σ. Σ 4. Λ. Λ 3. Λ 4. Λ 3. Σ 4. Σ 43. Σ 4. Λ 5. Σ 44. Σ 5. Σ 6. Σ 45. Λ 6.
ΑΠΑΝΤΗΣΕΙΣ - ΥΠΟ ΕΙΞΕΙΣ ΣΤΙΣ ΕΡΩΤΗΣΕΙΣ 36 Κεφάλαιο 3ο: ΟΛΟΚΛΗΡΩΤΙΚΟΣ ΛΟΓΙΣΜΟΣ Απαντήσεις στις ερωτήσεις του τύπου Σωστό-Λάθος. Σ. Σ 4. Λ. Λ 3. Λ 4. Λ 3. Σ 4. Σ 43. Σ 4. Λ 5. Σ 44. Σ 5. Σ 6. Σ 45. Λ 6.
Σήματα και Συστήματα. Διάλεξη 9: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Fourier. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 9: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Fourier Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Fourier 1. Μετασχηματισμός Fourier
Σήματα και Συστήματα Διάλεξη 9: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Fourier Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Fourier 1. Μετασχηματισμός Fourier
ΜΑΣ 371: Αριθμητική Ανάλυση ΙI ΑΣΚΗΣΕΙΣ. 1. Να βρεθεί το πολυώνυμο Lagrange για τα σημεία (0, 1), (1, 2) και (4, 2).
, (1, 2) και (4, 2).") ΜΑΣ 37: Αριθμητική Ανάλυση ΙI ΑΣΚΗΣΕΙΣ Να βρεθεί το πολυώνυμο Lagrage για τα σημεία (, ), (, ) και (4, ) Να βρεθεί το πολυώνυμο παρεμβολής Lagrage που προσεγγίζει τη συνάρτηση 3 f ( x) si x στους κόμβους
ΜΑΣ 37: Αριθμητική Ανάλυση ΙI ΑΣΚΗΣΕΙΣ Να βρεθεί το πολυώνυμο Lagrage για τα σημεία (, ), (, ) και (4, ) Να βρεθεί το πολυώνυμο παρεμβολής Lagrage που προσεγγίζει τη συνάρτηση 3 f ( x) si x στους κόμβους
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
Γεωµετρικη Θεωρια Ελεγχου
 Αριστοτελειο Πανεπιστηµιο Θεσσαλονικης Σχολη Θετικων Επιστηµων Τµηµα Μαθηµατικων Χειµερινό Εξάµηνο 2018-2019 Γεωµετρικη Θεωρια Ελεγχου εύτερη Εργασία, 2018-2019 1. ώστε δύο διαφορετικά παραδείγµατα συστηµάτων
Αριστοτελειο Πανεπιστηµιο Θεσσαλονικης Σχολη Θετικων Επιστηµων Τµηµα Μαθηµατικων Χειµερινό Εξάµηνο 2018-2019 Γεωµετρικη Θεωρια Ελεγχου εύτερη Εργασία, 2018-2019 1. ώστε δύο διαφορετικά παραδείγµατα συστηµάτων