Cuprins. Prefaţă 1 Cuprins 3 1. Modelarea corpurilor deformabile 7
|
|
|
- Κλυταιμνήστρα Ζάχος
- 7 χρόνια πριν
- Προβολές:
Transcript
1
2 Prefaţă Lucrarea repreintă cursul de Reistenţa materialelor care se predă studenţilor anului II al facultăţii de Inginerie Mecanică la Universitatea Politehnica Bucureşti. În ediţia de faţă partea teoretică depăşeşte materia predată efectiv la curs în schimb numărul aplicaţiilor a fost redus. Tradiţional în prima parte a cursului se studiaă bare şi sisteme de bare. Relaţiile de calcul stabilite în Reistenţa materialelor sunt strict valabile în caul barelor cu secţiune compactă constantă la care se adoptă ipotea nedeformabilităţii secţiunii transversale. Ele pot fi extinse la corpuri cu variaţie mică şi monotonă a secţiunii în lungul axei longitudinale şi cu anumite corecţii privind concentrarea locală a tensiunilor la bare cu secţiunea variabilă în trepte. În partea a doua a cursului se mai studiaă tuburi axial-simetrice cu pereţi groşi discuri de grosime constantă în mişcare de rotaţie şi plăci plane subţiri. Studiul general al barelor cu pereţi subţiri face obiectul unor cursuri diferite. În lucrare se definesc eforturile secţionale în bare tensiunile şi deformaţiile specifice deformaţiile şi deplasările punctelor corpurilor elastice. Se calculeaă variaţia eforturilor în lungul axei barelor şi se repreintă grafic sub forma unor diagrame de eforturi. Barele sunt solicitate la întindere (compresiune) forfecare încovoiere şi răsucire fie separat fie în diferite combinaţii. Se calculeaă distribuţia tensiunilor normale şi tangenţiale în secţiunea transversală şi se determină punctele în care apar tensiunile maxime şi valorile acestora care se compară separat sau combinate într-o tensiune normală echivalentă cu reistenţele admisibile. La reolvarea problemelor static nedeterminate sunt necesare patru tipuri de relaţii: ) ecuaţii de echilibru; ) condiţii de compatibilitate sau relaţii între deformaţii specifice şi deplasări; ) ecuaţii constitutive sau relaţii între tensiuni şi deformaţii specifice; şi 4) condiţii la limită de reemare sau de solicitare pe contur. Utiliarea acestora este menţionată pentru fiecare tip de solicitare. Cursul de Reistenţa materialelor predat la facultăţile cu profil mecanic îmbină noţiuni de Mecanica materialelor şi Teoria elasticităţii cu criterii de curgere şi teorii de reistenţă elemente de stabilitate elastică a barelor şi stări de tensiuni în corpuri axialsimetrice calculul la solicitări dinamice şi oboseală la solicitări în domeniul plastic. Modificarea în timp a structurii cursului a fost determinată de utiliarea calculatoarelor introducerea materialelor compoite devoltarea mecanicii ruperii a calculului la oboseală şi a metodei elementelor finite. cestea au impus devoltarea unor metode noi pentru calculul proprietăţilor geometrice ale secţiunilor de formă oarecare al deformaţiilor arborilor cu secţiune variabilă şi al sistemelor static nedeterminate în general. Ca urmare s-a introdus calculul tensiunilor în compoite stratificate armate cu fibre şi în bare cu secţiune eterogenă metoda deplasărilor pentru calculul sistemelor de bare calculul la oboseală la durată de viaţă limitată baat pe metoda "deformaţie specifică - durabilitate" precum şi o descriere mai detaliată a caracteristicilor mecanice ale metalelor la solicitări monotone şi solicitări ciclice.
3 Cuprins Prefaţă Cuprins. Modelarea corpurilor deformabile 7. Modelarea corpurilor 7. Modelarea sarcinilor 9. Modelarea reaemelor.4 Ipoteele reistenţei materialelor. Eforturi în bare 5. Metoda secţionării 5. Convenţii de semne 6. Definiţia eforturilor 7.4 Relaţii diferenţiale de echilibru la bare drepte 0.5 Diagrame de eforturi la bare drepte.6 Diagrame de eforturi la bare cotite plane 9.7 Diagrame de eforturi la bare cotite spaţiale.8 Relaţii diferenţiale de echilibru la bare curbe plane 5.9 Diagrame de eforturi la bare curbe plane 6. Tensiuni şi deformaţii specifice 9. Tensiuni 9. Convenţii de semne pentru tensiuni 4. Relaţii între eforturi şi tensiuni 4.4 Sisteme de tensiuni static determinate 4
4 4 REZISTENŢ MTERILELOR.5 Deformaţii specifice 49.6 Relaţii între tensiuni şi deformaţii specifice 5 4. Caracteristici mecanice la încărcări monotone 5 4. Încercarea la tracţiune uniaxială 5 4. Contracţia transversală Tensiuni şi deformaţii specifice reale Încercări la compresiune şi la forfecare Efectul temperaturii şi viteei de deformare Reistenţe admisibile Întinderea şi compresiunea barelor Tensiuni şi deformaţii la întindere Energia de deformaţie la întindere 7 5. Sisteme static nedeterminate Concentrarea tensiunilor Tensiuni pe o suprafaţă înclinată faţă de axa barei Răsucirea barelor 9 6. Calculul momentului de răsucire 9 6. Tensiuni în bare de secţiune axial-simetrică 9 6. Caracteristicile geometrice Ip şi Wp Deformaţii la răsucire Energia de deformaţie la răsucire Răsucirea barelor cu secţiune dreptunghiulară Răsucirea profilelor deschise cu pereţi subţiri Răsucirea profilelor închise cu pereţi subţiri Calculul arcurilor cilindrice elicoidale Sisteme static nedeterminate solicitate la răsucire Concentrarea tensiunilor la răsucirea barelor
5 CUPRINS 5 7. Proprietăţi ale suprafeţelor plane 9 7. Momente statice ale suprafeţelor plane 9 7. Momente de inerţie ale suprafeţelor plane 7. Variaţia momentelor de inerţie cu translaţia axelor Variaţia momentelor de inerţie cu rotaţia axelor 8 8. Încovoierea barelor 5 8. Tensiuni la încovoierea pură simetrică 5 8. Tensiuni la încovoierea oblică 4 8. Tensiuni de forfecare la încovoierea simplă Bare cu secţiune variabilă Bare cu secţiune eterogenă Deformaţii la încovoiere Centrul de forfecare Tensiuni în bare curbe Stări de tensiuni şi deformaţii specifice Starea tridimensională de tensiuni Starea plană de tensiuni Ecuaţii diferenţiale de echilibru Starea plană de deformaţii specifice Legea lui Hooke generaliată Ecuaţia lui Poisson Energia potenţială de deformaţie la încovoiere Compoite armate cu fibre 9.9 Tensiuni termice 9.0 Tensiuni de contact 0. Teorii de reistenţă 5 0. Teoriile clasice de reistenţă 6
6 6 REZISTENŢ MTERILELOR 0. Criterii de curgere 8 0. Criterii de rupere la materiale fragile plicarea teoriilor de reistenţă la stări plane de tensiuni 0.5 plicarea teoriilor de reistenţă la bare 0.6 Criteriul Tsai-Hill pentru compoite stratificate. Solicitări combinate 7. Întinderea excentrică 7. Bare solicitate la încovoiere şi răsucire 4. Bare solicitate la întindere şi răsucire 45 Bibliografie 49 nexe 5 Index 6
7 . MODELRE CORPURILOR DEFORMBILE Materialele utiliate în practica inginerească sunt deformabile. Sub acţiunea sarcinilor exterioare şi a variaţiilor de temperatură particulele care le compun îşi modifică poiţia relativă ceea ce duce la modificarea formei şi dimensiunilor pieselor şi structurilor. Reistenţa materialelor urmăreşte stabilirea unor relaţii între sarcinile exterioare aplicate corpurilor deformabile pe de o parte şi tensiunile şi deformaţiile produse de acestea pe de altă parte. Pe baa acestor relaţii se poate face dimensionarea elementelor constructive ale maşinilor astfel încât să reiste sarcinilor la care sunt supuse în timpul funcţionării în condiţii date de mediu ambiant. În reolvarea problemelor structura reală este înlocuită printr-un model de calcul. În acest scop se adoptă ipotee simplificatoare privind: ) forma şi dimensiunile elementelor componente; ) caracterul şi distribuţia sarcinilor aplicate; ) proprietăţile mecanice ale materialelor.. Modelarea corpurilor În funcţie de forma şi caracteristicile geometrice în Reistenţa materialelor se studiaă următoarele tipuri de corpuri:. Barele şi firele la care o dimensiune - lungimea - este predominantă în raport cu celelalte două. Se poate considera că o bară este generată prin deplasarea unei suprafeţe plane deobicei de secţiune constantă în lungul unei curbe (fig..) astfel încât normala la suprafaţă în centrul ei de greutate să rămână mereu tangentă la curbă. xa barei este linia care uneşte centrele de greutate ale secţiunilor transversale. Secţiunea transversală este perpendiculară pe axa barei. Barele sunt corpuri a căror lungime este mare în comparaţie cu dimensiunile secţiunii transversale.
8 8 REZISTENŢ MTERILELOR Barele pot fi drepte cotite sau curbe de secţiune constantă sau variabilă. În figura. se preintă câteva tipuri de secţiuni uuale pentru bare. Fig.. Barele solicitate la încovoiere se mai numesc grini cele solicitate la întindere sunt tiranţi iar cele solicitate la întindere şi compresiune sunt tije ăbrele şi contrafişe. Barele verticale solicitate la compresiune poartă numele de coloane sau stâlpi. rborii sunt bare solicitate la răsucire şi încovoiere (fig..). În general în cadrul Reistenţei materialelor se studiaă bare de secţiune compactă. O categorie aparte o formeaă barele cu pereţi subţiri cu profil deschis sau închis. Bara cu pereţi subţiri este un corp a cărui lungime este mare şi a cărui grosime este mică în comparaţie cu dimensiunile generale ale secţiunii transversale. Firele au aceleaşi caracteristici geometrice ca unele bare dar sunt flexibile adică au rigiditate la încovoiere neglijabilă putând fi solicitate numai la întindere. Fig... Plăcile şi învelişurile la care o dimensiune - grosimea - este mult mai mică decât celelalte două. Elementele geometrice caracteristice ale plăcilor sunt suprafaţa mediană (plană sau curbă) şi grosimea - măsurată pe o normală la suprafaţa mediană. Plăcile pot fi planşee panouri pereţi acoperişuri sau radiere (fig..). Membranele au grosimea foarte mică şi nu pot prelua sarcini transversale sau de compresiune.

. Fig.. De reţinut că barele plăcile învelişurile etc.")


9 . MODELRE CORPURILOR DEFORMBILE 9. Corpurile masive şi blocurile la care cele trei dimensiuni au acelaşi ordin de mărime (de exemplu bilele şi rolele rulmenţilor suporturile masive blocurile de fundaţie etc.). Fig.. De reţinut că barele plăcile învelişurile etc. sunt modele ale Mecanicii solidelor deformabile schematiări ale organelor de maşini şi elementelor de construcţii convenabile pentru stabilirea relaţiilor de calcul al tensiunilor şi deformaţiilor şi al dimensiunilor acestora. În ce măsură o anumită piesă poate fi modelată ca bară sau placă care este limita între o bară scurtă şi o placă sau între o placă şi o membrană sunt întrebări la care inginerul mecanic trebuie să răspundă.
10 0 REZISTENŢ MTERILELOR. Modelarea sarcinilor Sarcinile exterioare aplicate corpurilor sunt reultatul interacţiunii mecanice sau al acţiunii unor câmpuri (magnetic gravitaţional centrifugal termic etc.). În general se disting: - forţe concentrate (F în fig..4) care se măsoară în unităţi de forţă (N); - sarcini distribuite pe un element liniar (q în fig..4) care se măsoară în N/m sarcini distribuite pe o suprafaţă (p în fig..4) care se măsoară de exemplu în N/m şi sarcini distribuite într-un volum măsurate în N/m. Fig..4 Sarcinile distribuite pot fi: ) uniform distribuite (q const.) - ca în caul greutăţii proprii a unei bare sau a unui fir de secţiune constantă ) distribuite liniar - ca în caul presiunii hidrostatice pe un perete vertical şi ) sarcini distribuite conform unei legi date ca presiunea vântului pe o structură etc. Fig..5 Sarcinile aplicate unei grini (fig..5) pot fi forţe concentrate sarcini distribuite pe unitatea de lungime şi momente concentrate. Primele sunt ilustrate în figura.5 a în care sarcina acţioneaă de fapt pe suprafaţa barei în lungul unei linii
11 . MODELRE CORPURILOR DEFORMBILE perpendiculare pe axa longitudinală. ceasta este o idealiare. În realitate o sarcină concentrată este de fapt distribuită pe o porţiune foarte mică a barei. O sarcină distribuită este ilustrată în figura.5 b. Intensitatea sarcinii este considerată constantă pe lăţimea barei dar poate avea o distribuţie oarecare în lungul barei. Un moment concentrat este arătat în figura.5 c. El apare fie dintr-un moment de răsucire transmis de la o altă bară perpendiculară pe cea încovoiată fie dintr-un cuplu de forţe concentrate egale şi de sens contrar care se reduce la un cuplu concentrat. În funcţie de locul de aplicare se deosebesc: - sarcini de suprafaţă aplicate la suprafaţa corpului care reultă de obicei din interacţiunea mecanică între corpuri; - forţe masice (volumice) aplicate în toată masa corpului care reultă din acţiunea unui câmp (gravitaţional centrifugal magnetic termic etc.). În funcţie de modul de variaţie în timp se pot considera: - forţe aplicate static a căror intensitate creşte monoton de la ero la valoarea nominală într-un timp foarte lung pe măsura deformării corpului rămânând apoi constante; - forţe aplicate dinamic care ating valoarea nominală într-un timp relativ scurt mai mic sau comparabil cu perioada proprie de vibraţie a elementului sau structurii solicitate. Fig..6. Modelarea reaemelor La structuri plane capetele barelor pot fi reemate ca în figura.6. Reaemul simplu rigid (fig..6 a) permite deplasarea paralelă cu linia de suport şi rotirea dar blocheaă deplasarea perpendiculară pe linia de suport deci acţioneaă asupra barei cu o reacţiune perpendiculară pe linia de suport.
12 REZISTENŢ MTERILELOR rticulaţia rigidă (fig..6 b) permite numai rotirea capătului barei deci acţioneaă cu o reacţiune de mărime şi direcţie necunoscute care se descompune în două componente perpendiculare între ele. Încastrarea rigidă fixă (fig..6 c) blocheaă toate cele trei grade de libertate ale capătului barei şi produce ca reacţiuni un moment şi o forţă repreentată prin cele două componente. Încastrarea rigidă mobilă (fig..6 d) permite deplasarea pe o direcţie deci produce ca reacţiuni un moment şi o forţă perpendiculară pe direcţia de mişcare. În structurile reale atunci când nu se poate neglija deformabilitatea reaemelor acestea se modeleaă prin reaeme elastice la care forţele sunt proporţionale cu deplasările sau încastrări elastice la care momentul este proporţional cu rotirea..4 Ipoteele Reistenţei materialelor În vederea simplificării relaţiilor de calcul în Reistenţa materialelor se adoptă următoarele ipotee privind proprietăţile materialelor:. Ipotea mediului continuu prin care se admite că tot volumul unui corp este ocupat de substanţă.. Ipotea mediului omogen în baa căreia proprietăţile fiice (de exemplu densitatea de masă) se consideră constante în orice punct al unui corp.. Ipotea mediului iotrop potrivit căreia în orice punct al corpului proprietăţile mecanice nu depind de direcţie (în particular de direcţia de aplicare a solicitării). 4. Ipotea mediului elastic. Sub acţiunea solicitării exterioare un corp elastic se deformeaă instantaneu iar la îndepărtarea sarcinii revine instantaneu la forma şi dimensiunile iniţiale. De asemenea acţiunea unei forţe într-un punct oarecare se transmite instantaneu în tot corpul. Ultimele două ipotee sunt reconsiderate în capitole speciale despre materiale compoite bare cu secţiuni eterogene sau solicitări în domeniul elastoplastic. În afara celor patru ipotee privind materialele menţionate mai sus în Reistenţa materialelor se admit şi următoarele simplificări: 5. Ipotea liniarităţii relaţiilor cauă-efect. În particular se admit relaţii liniare între forţe şi deformaţii precum şi între eforturi şi tensiuni. La sisteme liniare se poate aplica principiul suprapunerii efectelor. Ca urmare ordinea aplicării sarcinilor exterioare nu influenţeaă starea finală de tensiuni şi deformaţii a corpurilor.
13 . MODELRE CORPURILOR DEFORMBILE 6. Ipotea deformaţiilor mici conform căreia se consideră că deformaţiile corpurilor elastice sunt mici în comparaţie cu dimensiunile acestora. Prin această ipoteă se exclud neliniarităţile geometrice adică cele determinate de forma corpurilor precum şi neliniarităţile fiice menţinând solicitările la valori reduse sau la care relaţiile între eforturi şi deformaţii sunt liniare. Se consideră că deformaţiile mici ale corpurilor nu afecteaă acţiunea forţelor (de exemplu direcţia acestora) şi sunt neglijabile în calculul solicitărilor. Ca urmare la calculul reacţiunilor din reaeme se consideră corpurile nedeformate aplicând ecuaţiile de echilibru din statică la fel ca la corpurile rigide. cesta este un calcul de ordinul I considerat acceptabil pentru reolvarea majorităţii problemelor de Reistenţa materialelor. În unele studii de exemplu de stabilitate elastică se face un calcul de ordinul II în care ecuaţiile de echilibru se scriu pentru starea deformată a corpurilor menţinând ipotea deformaţiilor mici. În caul deformaţiilor mari se face un calcul de ordinul III baat pe ecuaţii neliniare. 7. Principiul lui Saint Venant. Dacă asupra unui corp elastic acţioneaă două sisteme de sarcini exterioare echivalente din punct de vedere static atunci la distanţă suficient de mare de ona de aplicare a acestora efectul lor este acelaşi. Fig..7 Fig..8 stfel sarcina distribuită q şi forţa F din figura.7 echivalente din punct de vedere static produc local distribuţii diferite de tensiuni şi deplasări dar la distanţă de exemplu în încastrare efectul lor este acelaşi. 8. Ipotea secţiunii plane (Ipotea lui Bernoulli). O secţiune plană şi perpendiculară pe axa unei bare nesolicitate rămâne plană şi perpendiculară pe axa barei şi după aplicarea sarcinilor exterioare. De exemplu secţiunea B-B normală la axa nedeformată a barei din figura.8 a rămâne plană şi perpendiculară pe axa deformată a barei (fig..8 b) şi după aplicarea forţei F. Ipotea secţiunii plane este valabilă la bare cu variaţie lentă a momentelor încovoietoare şi a forţelor axiale în lungul barei. Variaţia momentelor încovoietoare datorită forţelor tăietoare produce deformaţii de forfecare care deplaneaă secţiunea transversală. Efectul este neglijabil doar la bare velte aşa
14 4 REZISTENŢ MTERILELOR cum se arată în capitolul 6. În caul răsucirii ipotea secţiunii plane este valabilă doar la bare cu secţiune axial-simetrică. Primele şapte ipotee sunt comune Reistenţei materialelor şi Teoriei elasticităţii. Ipotea lui Bernoulli este specifică Reistenţei materialelor. În studiul plăcilor subţiri se adoptă ipotea normalei rectilinii (ipotea lui Kirchhoff) conform căreia o linie dreaptă şi normală la suprafaţa mediană nedeformată rămâne dreaptă şi perpendiculară pe suprafaţa mediană deformată a plăcii în urma solicitării. lături de ipoteele menţionate în special la studiul barelor cu pereţi subţiri se adoptă următoarele "ipotee de bară": 9. Ipotea constanţei secţiunii transversale. Barele sunt în general corpuri cilindrice sau cu variaţie mică a secţiunii în lungul barei. Relaţiile de calcul stabilite în Reistenţa materialelor sunt strict valabile în caul barelor cu secţiune compactă constantă. Ele pot fi extinse la corpuri cu variaţie mică şi monotonă a secţiunii în lungul axei longitudinale şi cu anumite corecţii privind concentrarea locală a tensiunilor la bare cu secţiunea variabilă în trepte. 0. Ipotea nedeformabilităţii secţiunii transversale. Secţiunea barei are deplasări transversale ca rigid şi deplasări elastice normale la planul secţiunii transversale. La barele cu profil închis forma secţiunii transversale nu se modifică iar proiecţia pe planul secţiunii iniţiale rămâne aceeaşi. La barele cu pereţi subţiri secţiunea transversală se poate deplana. Împiedicarea deplanării produce tensiuni suplimentare. La torsiunea barelor de secţiune circulară diametrele secţiunilor transversale se consideră că rămân linii drepte. La bare cu secţiunea în I sau T se admite că tălpile rămân perpendiculare pe inimă. Tradiţional în Reistenţa materialelor se studiaă bare şi sisteme de bare. Studiul plăcilor plane subţiri al tuburilor axial-simetrice cu pereţi groşi şi al discurilor de grosime constantă în mişcare de rotaţie se face uneori la Reistenţa materialelor dar constituie obiectul Teoriei aplicate a elasticităţii. Studiul barelor cu pereţi subţiri şi al structurilor şi componentelor din materiale compoite face obiectul unor capitole speciale sau al unor cursuri aparte.
15 . EFORTURI ÎN BRE Barele sunt solicitate la întindere compresiune forfecare încovoiere şi răsucire fie separat fie în diferite combinaţii. În acest capitol se definesc eforturile secţionale care produc aceste solicitări şi convenţiile de semne aferente. Se calculeaă variaţia eforturilor în lungul axei barelor şi se repreintă grafic sub forma unor diagrame de eforturi. La bare de secţiune constantă acestea permit stabilirea secţiunii în care solicitarea este maximă.. Metoda secţionării Fie o bară elastică în echilibru sub acţiunea sarcinilor exterioare F F q... F 4 şi a reacţiunilor din reaeme R R R (fig.. a). Se pune problema evaluării forţelor interioare care acţioneaă într-o secţiune oarecare B-B. Fig..
16 6 REZISTENŢ MTERILELOR Pentru aceasta se aplică metoda secţionării. Se secţioneaă bara (imaginar) prin planul B-B se separă cele două părţi se transformă forţele interioare din secţiunea B-B în forţe exterioare şi se scriu condiţiile de echilibru static pentru fiecare parte de bară. Se presupune că legătura între particulele situate de o parte şi de alta a planului secţiunii B-B se manifestă prin interacţiuni de tip forţe distribuite pe întreaga suprafaţă a secţiunii transversale a barei. Forţele din secţiune care repreintă acţiunea părţii din stânga a barei asupra celei din dreapta se reduc în centrul de greutate al secţiunii transversale la un torsor compus din forţa reultantă D şi cuplul reultant de moment D (fig.. b). Conform principiului acţiunii şi reacţiunii în centrul de greutate al S secţiunii barei din stânga acţioneaă forţa şi cuplul reultant de moment S egale şi de sens contrar cu cele care acţioneaă asupra părţii din dreapta. Fig... Convenţii de semne Se va utilia un sistem de axe drept. Pentru o bară oriontală axa x coincide cu axa barei şi este orientată de la stânga la dreapta axa este dirijată în jos iar axa este oriontală dirijată spre observator (fig..).
17 . EFORTURI ÎN BRE 7 Dacă sensul normalei exterioare la secţiunea transversală coincide cu sensul poitiv al axei x atunci faţa respectivă a barei se numeşte faţă poitivă. Pe o faţă negativă sensul normalei exterioare este contrar axei x (fig.. a). În figura. b s-au pus în evidenţă componentele în lungul axelor de coordonate ale reultantei forţelor şi momentului reultant ce acţioneaă în centrul de greutate al secţiunii transversale. S-a adoptat următoarea convenţie de semne: Forţele şi momentele care acţioneaă pe faţa poitivă a unui element de bară sunt poitive atunci când sunt dirijate în sensul poitiv al axelor de coordonate. Forţele şi momentele sunt poitive pe faţa negativă atunci când acţioneaă în sensul negativ al axelor de coordonate.. Definiţia eforturilor Cele şase ecuaţii scalare de echilibru static al părţii din stânga a barei se scriu sub forma: Σ X Σ Y Σ Z S S S S x S S Σ M Σ M Σ M S x S S S x S S (.) În ecuaţiile (.) S X Σ repreintă suma proiecţiilor pe axa x a forţelor ce acţioneaă asupra părţii din stânga a barei iar Σ M x este suma momentelor forţelor (şi cuplurilor de forţe) care acţioneaă asupra părţii din stânga a barei calculate faţă de axa x. Sumele faţă de axele şi se definesc corespunător. Conform principiului acţiunii şi reacţiunii între cele şase componente ale torsorului de reducere a forţelor din secţiune ce acţioneaă asupra celor două părţi ale barei se stabilesc relaţiile: S D x D D S x S S Din relaţiile (.) şi (.) reultă D x D D Σ X Σ Y Σ Z S S S N T T D x D D D x D D S x S S Σ M. Σ M Σ M S x S S M M M t i i. (.) (.)
18 8 REZISTENŢ MTERILELOR unde în plus au fost definite şi eforturile secţionale repreentate în figura.. Fig.. Forţa axială. Componenta pe axa x a reultantei forţelor interioare se numeşte forţă axială şi se noteaă N. Într-o secţiune oarecare forţa axială este egală cu suma proiecţiilor pe axa x a forţelor exterioare care acţioneaă asupra părţii din bară situate în stânga secţiunii (sau a celor situate în dreapta cu semn schimbat). Forţa axială N produce întinderea sau comprimarea barei (fig..4 a şi b). Forţele tăietoare. Componenta pe axa a reultantei se numeşte forţă tăietoare şi se noteaă T. Ea este egală cu suma proiecţiilor pe axa a forţelor ce acţioneaă asupra părţii de bară situate la stânga secţiunii (sau a celor din dreapta cu semn schimbat). La fel pentru componenta (tăiere) (fig..4 c). Momentul de răsucire. D T D. Forţele tăietoare produc forfecare Componenta pe axa x a cuplului se numeşte moment de răsucire (torsiune) şi se noteaă M t. Într-o secţiune dată momentul de răsucire este egal cu suma proiecţiilor pe axa x a momentelor forţelor şi a cuplurilor ce acţioneă asupra părţii din stânga a barei (sau a celor din dreapta cu semn schimbat). Momentul M produce răsucirea (torsionarea) barei (fig..4 d). t Momentele încovoietoare. D Componenta pe axa a cuplului se numeşte moment încovoietor şi D se noteaă M i. (La fel M i ). Ea este egală cu suma momentelor forţelor şi a cuplurilor ce acţioneaă asupra părţii din stânga a barei calculate în raport cu D D axa (respectiv ). Momentele şi notate în general M i produc îndoirea (încovoierea) barei (fig..4 e). D



. Fig.")


19 . EFORTURI ÎN BRE 9 Reultă că utiliând metoda secţionării se pun în evidenţă componentele torsorului de reducere a forţelor interioare în centrul de greutate al secţiunii transversale denumite generic eforturi. Se adoptă aceeaşi convenţie de semne ca în figura. b. Pe faţa poitivă eforturile sunt poitive când sunt dirijate în sensul poitiv al axelor de coordonate. Eforturile care acţioneaă pe faţa negativă sunt poitive atunci când au vectorii dirijaţi în sensul negativ al axelor de coordonate (fig..). Fig..4 Uneori este util să se corelee eforturile poitive cu deformaţiile produse de acestea. Fig..5 Pentru o bară dreaptă oriontală solicitată de sarcini transversale verticale convenţia de semne în planul xo este ilustrată în figura.5 în care s-a renunţat la indici în notarea eforturilor. Sarcina p poitivă acţioneaă în jos acesta fiind şi sensul în care sunt aplicate sarcinile exterioare la majoritatea barelor oriontale.
20 0 REZISTENŢ MTERILELOR Momentele încovoietoare M sunt poitive când produc întinderea părţii de jos a barei deci când forma îndoită a barei are concavitatea în sus (ca în fig..4 e). Forţele tăietoare T sunt poitive când produc o lunecare similară unei rotiri în sensul orar (ca în fig..4 c). Forţele axiale N se consideră poitive atunci când produc întindere (fig..4 a) şi negative atunci când produc compresiune (fig..4 b). Momentele de răsucire se vor considera poitive atunci când vectorul moment este dirijat la fel ca vectorul forţelor axiale poitive (fig..4 d). Trebuie remarcat că aceste reguli nu mai sunt aplicabile pentru bara solicitată de sarcini oriontale deci în planul xo. Relaţiile (.) exprimă dependenţa eforturilor secţionale de sarcinile exterioare aplicate barei. În Reistenţa materialelor se calculeaă variaţia eforturilor în lungul axei barelor şi se repreintă grafic sub forma diagramelor de eforturi..4 Relaţii diferenţiale de echilibru la bare drepte Fie un element infiniteimal de lungime dx detaşat dintr-o bară solicitată prin sarcini verticale perpendiculare pe axă în planul xo (fig..6). Lungimea dx fiind foarte mică sarcina p se consideră uniform distribuită. În secţiunile din capete acţioneaă eforturile indicate în figură repreentând acţiunea părţilor de bară adiacente asupra elementului respectiv. Fig..6 Ecuaţiile de echilibru ale forţelor se scriu : N + dn N 0; T p dx (T + dt ) 0.
21 . EFORTURI ÎN BRE Ecuaţia de echilibru a momentelor faţă de punctul L este dx M + T dx p dx ( M + dm ) 0. După reduceri şi neglijarea infiniţilor mici de ordin superior ecuaţiile de mai sus valabile în planul xo se scriu : sau dn 0 ; p dx dt 0; T dx dm 0 N const.; dt dx p ; (.4) dm T. (.5) dx Din relaţiile diferenţiale de echilibru (.4) şi (.5) denumite şi relaţii diferenţiale între eforturi şi sarcini prin eliminarea lui T se obţine : d M p. (.6) d x Pe baa acestor relaţii se stabilesc reguli general valabile utile la construcţia diagramelor de eforturi la bare drepte: a) Pe porţiunile de bară nesolicitate (p 0) forţa tăietoare este constantă iar momentul încovoietor variaă liniar. b) Pe porţiunile de bară solicitate cu sarcini uniform distribuite (p const.) forţa tăietoare variaă liniar iar momentul încovoietor variaă parabolic. c) Diagrama forţelor tăietoare are o discontinuitate (salt) în dreptul unei forţe concentrate iar diagrama momentelor încovoietoare are o discontinuitate în dreptul unui cuplu concentrat. d) Diagrama momentelor încovoietoare are valori extreme (maxim sau minim) în secţiunile în care forţa tăietoare se anuleaă. e) Pe porţiunile de bară unde forţa tăietoare este poitivă (negativă) momentul încovoietor creşte (scade). f) Dacă sarcina distribuită este poitivă (negativă) forţa tăietoare scade (creşte) iar diagrama momentelor încovoietoare are concavitatea în sus (în jos). Din relaţia (.5) se obţine dm T dx M T dx + C
22 REZISTENŢ MTERILELOR unde C este o constantă de integrare în general diferită de ero dacă asupra barei acţioneaă cupluri concentrate. Reultă că g) Într-o secţiune dată momentul încovoietor este egal cu aria diagramei forţelor tăietoare calculată de la capătul din stânga al barei până la ordonata din secţiunea respectivă (sau cea calculată de la capătul din drepta cu semn schimbat) dacă pe intervalul respectiv nu există cupluri concentrate (C 0)..5 Diagrame de eforturi la bare drepte Pentru construcţia diagramelor de eforturi sunt necesare: ) o convenţie de semne privind sensul poitiv al eforturilor; ) o convenţie de semne privind sensul poitiv al axelor diagramelor de eforturi şi ) relaţiile diferenţiale de echilibru. Convenţia de semne pentru eforturi reultă din figura.. Diagramele forţelor axiale şi forţelor tăietoare se repreintă cu axa ordonatelor poitivă în sus în timp ce diagrama momentelor încovoietoare se repreintă cu axa ordonatelor poitivă în jos (pe partea întinsă a barei). ceastă convenţie face ca diagrama momentelor încovoietoare să aibă o alură asemănătoare formei deformate a barei. Diagrama momentelor de torsiune se va repreenta cu momentele poitive în sus. Pentru început se vor considera bare drepte solicitate de forţe şi sarcini distribuite cuprinse într-un plan vertical care conţine axa barei respectiv de cupluri având vectorul moment perpendicular pe acest plan. Trebuie amintit că în Reistenţa materialelor forţele şi momentele exterioare sunt vectori legaţi de punctul de aplicare spre deosebire de Mecanica solidelor rigide în care forţele sunt vectori alunecători iar momentele sunt considerate vectori liberi. De asemenea trebuie avut în vedere că eforturile secţionale sunt mărimi convenţionale introduse pentru simplificarea calculelor. În realitate forţele interioare se exercită pe toată suprafaţa secţiunii transversale nu numai în centrul de greutate al acesteia fiind distribuite continuu ceea ce impune introducerea altor mărimi fiice tensiunile care să caracteriee interacţiunea dintre particulele unui corp deformabil solicitat mecanic..5. Diagrame de forţe tăietoare şi momente încovoietoare a) Grindă simplu reemată încărcată cu o forţă concentrată (fig..7) Din ecuaţiile de echilibru reultă reacţiunile : F b V ; V F a.
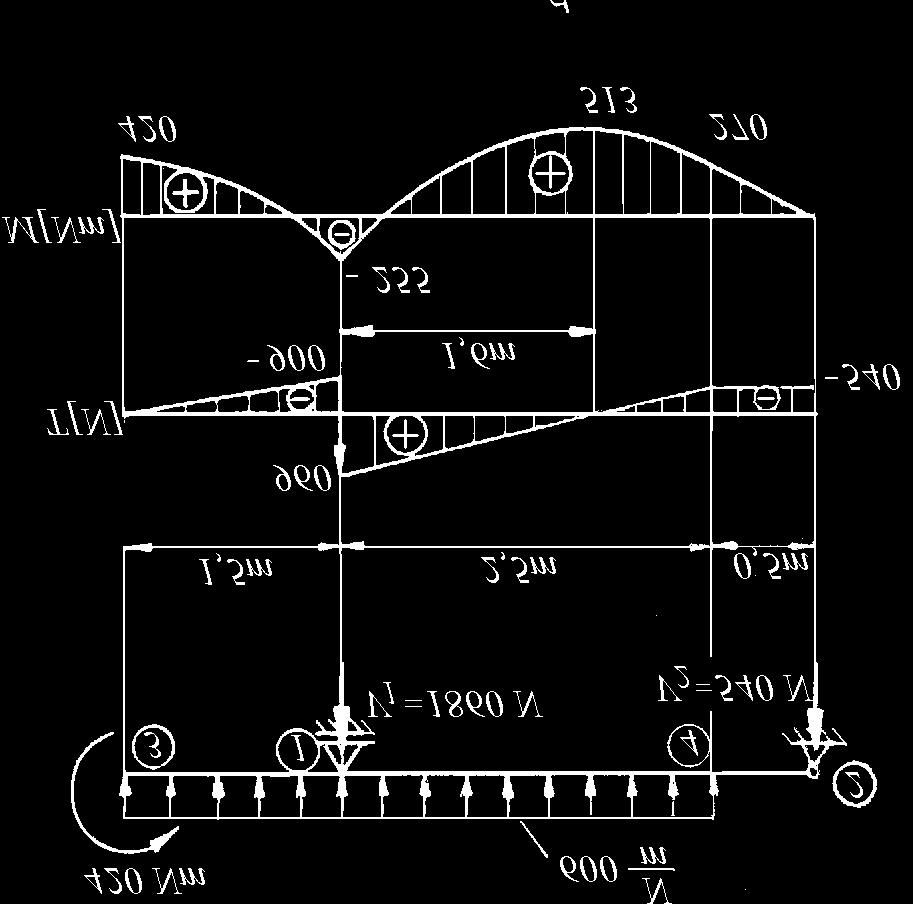
23 . EFORTURI ÎN BRE Forţa tăietoare este constantă pe cele două porţiuni F b T V ; T V F În secţiunea în diagrama T apare un salt egal cu F. Momentul încovoietor are valorile : M şi variaă liniar pe cele două porţiuni : F b 0 M a M F a F b F a M V x x M V x' x' 0. F a b Valoarea maximă M max apare în secţiunea unde diagrama forţei tăietoare intersecteaă axa absciselor. Fig..7 Fig..8 b) Grindă simplu reemată încărcată parţial cu sarcină uniform distribuită (fig..8) Se înlocuieşte sarcina distribuită cu o forţă concentrată 06 q aplicată la mijlocul porţiunii -. Din ecuaţiile de echilibru se calculeaă reacţiunile : V 8 q ; V 0 4 q. 0
24 4 REZISTENŢ MTERILELOR În punctul forţa tăietoare este fiind constantă pe porţiunea - : T 08 q T 08 q Pe porţiunea - într-o secţiune oarecare x forţa tăietoare este În punctul T x T T 08 q q x. 08 q 0 6 q 0 4. q Forţa tăietoare se anuleaă ( T 0 ) în punctul 4 situat la distanţa x 0 8 faţă de secţiunea. Momentul încovoietor variaă liniar pe porţiunea - având la capete valorile : M 0; M V q q. Pe porţiunea - momentul încovoietor variaă parabolic în secţiunea x având expresia M x qx qx V ( x) 08 q ( x). În secţiunea 4 se obţine valoarea maximă q M max 0 8 q 0 58 ( 08 ) q. c) Grindă simplu reemată solicitată de un cuplu concentrat (fig..9) Reacţiunile sunt V V. Forţa tăietoare este constantă în lungul barei T. Momentul încovoietor variaă liniar : M x; M x'.
25 . EFORTURI ÎN BRE 5 În punctul apare un salt egal cu valorile în secţiunile adiacente fiind M a; M + ε b ε. Fig..9 Fig..0 d) Grindă în consolă încărcată cu forţă concentrată şi sarcină distribuită (fig..0) Din ecuaţia de proiecţii pe verticală a forţelor se obţine reacţiunea V 0. Din ecuaţia de momente faţă de punctul se obţine momentul din q încastrare M 0 8 q. Forţa tăietoare este constantă pe porţiunea - : şi are un salt egal cu T 0 q q în secţiunea scăând apoi liniar la ero. Momentul încovoietor în încastrare este M 0 8 q pe porţiunea - variaă liniar până la M 0 q scăând apoi parabolic la ero în punctul unde diagrama momentelot încovoietoare are pantă nulă deoarece forţa tăietoare este nulă.
 Pentru calculul reacţiunilor se înlocuieşte sarcina distribuită cu o forţă q concentrată aplicată la distanţa de reaemul din stânga (în centrul de q q greutate al triunghiului).")
26 6 REZISTENŢ MTERILELOR e) Grindă simplu reemată încărcată cu sarcină triungiulară (fig..) Pentru calculul reacţiunilor se înlocuieşte sarcina distribuită cu o forţă q concentrată aplicată la distanţa de reaemul din stânga (în centrul de q q greutate al triunghiului). Se obţin valorile V V. 6 În secţiunea x intensitatea sarcinii distribuite este : forţa tăietoare este iar momentul încovoietor este q x x q q q q x Tx qx x 6 6 M x q x q x q x x q x x nulând expresia forţei tăietoare se obţine abscisa x în care momentul încovoietor are valoarea maximă q M max. 9 Fig.. Fig..


27 . EFORTURI ÎN BRE 7 a b c d e Fig.. f

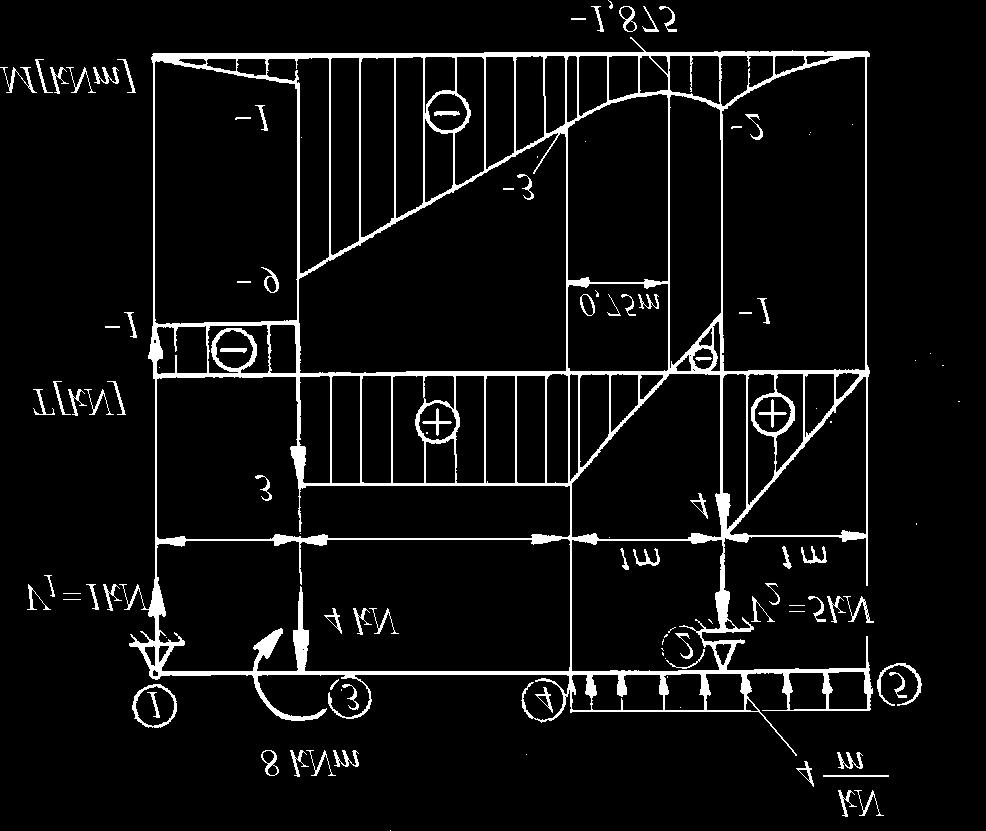
28 8 REZISTENŢ MTERILELOR Exemplul. Se cere să se construiască diagramele T şi M la grinda din figura.. Reolvare M Reacţiunile sunt : V N; V N. 5 Forţele tăietoare au valorile: T N; T ( 5 7x) N; T N. 5 Pentru T 4 0 se obţine x 6 m Momentele încovoietoare au valorile : M 5 Nm; M 5 Nm; 4 Nm; M Nm. ε + ε Reultă M max 4 Nm. Exemple de calcul În figura. se dau şase exemple de grini la care s-au construit diagramele forţelor tăietoare şi ale momentelor încovoietoare..5. Diagrama forţelor axiale Pentru bara din figura.4 a solicitată de forţe dirijate în lungul axei barei se calculeaă forţa axială pe fiecare porţiune : N F; N F; N F; N F şi se construieşte diagrama de eforturi din figura.4 b ţinând cont de convenţiile de semne. Fig..4 Fig..5
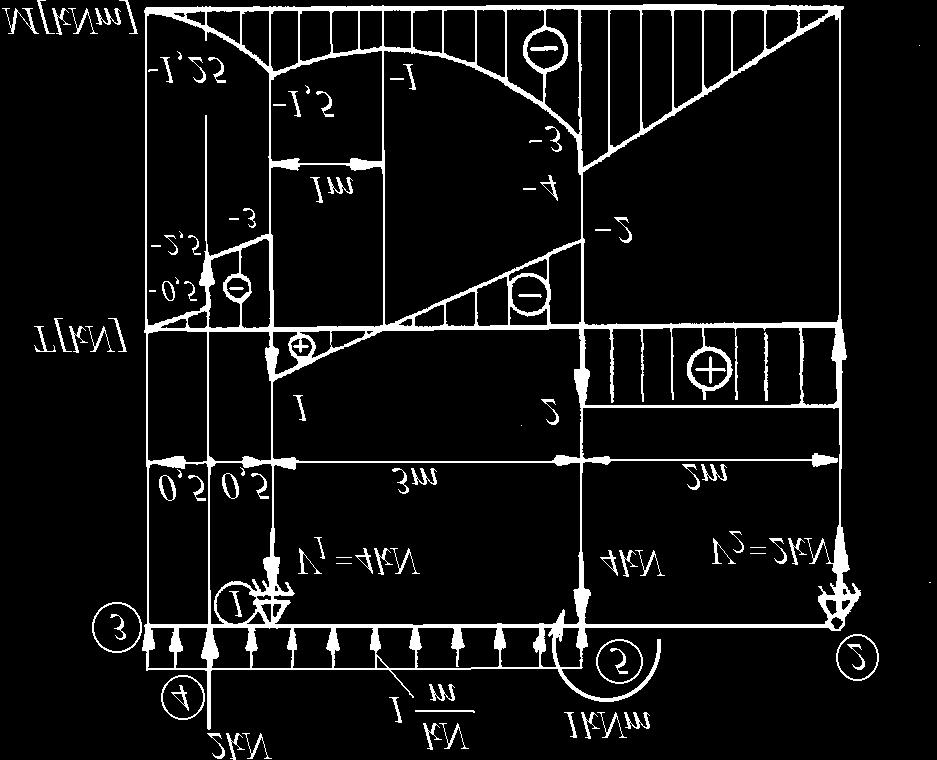
29 . EFORTURI ÎN BRE 9.5. Diagrama momentelor de răsucire Pentru bara din figura.5 a solicitată de momentul activ M şi de momentele reistente M... M 4 ecuaţia de echilibru a momentelor este M + M M + M + M 0. 4 Se calculeaă momentul de torsiune pe fiecare porţiune de bară: M M t t 4 M M + M M t M M + M ( M + M ) M M 4 t 4 5 apoi se repreintă grafic faţă de o linie de referinţă paralelă cu axa barei ca în figura.5 b ţinând cont de convenţiile de semne. 4.6 Diagrame de eforturi la bare cotite plane Barele cotite şi cadrele sunt formate din mai multe bare drepte legate prin noduri rigide. Nodurile rigide realieaă legături care menţin unghiul dintre axele barelor concurente în nod şi după aplicarea solicitării. Pentru construcţia diagramelor de eforturi trebuie preciat pentru fiecare bară componentă sensul poitiv al axei x. În cele ce urmeaă se consideră bare cotite solicitate de sarcini coplanare. Fie bara din figura.6. Se calculeaă reacţiunile. Din ecuaţia de proiecţii pe verticală a forţelor se obţine V q. Se înlocuieşte sarcina distribuită cu o forţă oriontală q aplicată la mijlocul barei -. Ecuaţia de momente faţă de punctul se scrie q + q H 0 Reultă H q. Din ecuaţia de proiecţii pe oriontală a forţelor se obţine 4 q H. 4 Forţele axiale au valorile : N q N 5 q N Cu aceste valori se construieşte diagrama din figura.6 b.
30 0 REZISTENŢ MTERILELOR Forţele tăietoare sunt : T q 4 T Fig..6 q q x 4 ε T q 4 T + ε q T 4 q T4 5 0 T5 q. 4 Cu aceste valori se construieşte diagrama din figura.6 c. Momentele încovoietoare au valorile : M 0 M q M 4 M5 q M cu ajutorul cărora se construieşte diagrama din figura.6 d. Se observă că la colţurile barei cotite valorile forţelor axiale şi forţelor tăietoare se modifică la trecerea de la o bară la cealaltă deoarece aceste eforturi depind de direcţie. În schimb valorile momentelor încovoietoare sunt aceleaşi pentru cele două bare concurente într-un nod deoarece valoarea momentului încovoietor depinde numai de punctul în care se calculeaă şi nu de direcţia barei. Exemple de calcul În figura.7 se dau patru exemple de grini cotite la care s-au construit diagramele forţelor axiale forţelor tăietoare şi ale momentelor încovoietoare.


31 . EFORTURI ÎN BRE a b c Fig..7 d
32 REZISTENŢ MTERILELOR.7 Diagrame de eforturi la bare cotite spaţiale La bare cotite spaţiale se construiesc diagrame de eforturi faţă de o linie de referinţă la fel ca bara. Pe fiecare porţiune se defineşte orientarea axei x care poate fi arbitrară deşi se preferă continuitatea sensului la schimbarea direcţiei. În continuare se vor construi patru diagrame de eforturi N T deci diagramele forţelor tăietoare T M i şi T şi ale momentelor încovoietoare M t M M i vor fi desenate în diagrama T respectiv M i. Funcţie de tipul aplicaţiei se pot construi fie doar diagramele M i şi M t fie diagramele N şi M i. Relaţiile diferenţiale de echilibru (.4) (.5) în planul xo scrise cu indici au forma dt dm p T. (.7) dx dx În planul xo relaţiile diferenţiale de echilibru se scriu dt dx dm p T. (.8) dx Reultă că în planul xo regula de semne şi repreentarea geometrică pentru forţe tăietoare este aceeaşi ca în planul xo în schimb momentele încovoietoare au semn contrar deci diagrama momentelor încovoietoare va avea aceeaşi formă dar cu semne schimbate. Pentru bare încastrate la un capăt este recomandabil să se înceapă calculul de la cătul liber; astfel nu mai este necesar calculul reacţiunilor. Prima porţiune dreaptă se consideră încastrată în restul sistemului şi se construiesc diagramele de eforturi aferente. Pentru construcţia diagramelor de eforturi pe următoarea porţiune dreaptă se reduc forţele de pe porţiunea anterioară în capătul adiacent al barei şi se consideră bara încastrată la celălalt capăt (se "rigidieaă" restul sistemului). Deobicei se precieaă sensul axelor şi pentru fiecare porţiune dreaptă. În continuare pentru simplificarea expunerii nu se face această preciare. Pentru claritate la diagrama momentelor de răsucire s-a inversat convenţia de semne. Exemplul. Fie bara din figura.8 a la care s-a preciat sensul axei x pe fiecare porţiune. Se consideră porţiunea - încastrată în (fig..8 b). Se calculeaă eforturile şi se repreintă pe porţiunea respectivă din diagramele din fig..8 d e f g: N 4 kn T kn (în plan vertical) M 6 knm (în plan vertical) M t 0. i
33 . EFORTURI ÎN BRE Se secţioneaă bara în. Se reduc forţele aplicate în în punctul al barei - (fig..8 c) încastrată în. Se calculeaă eforturile N 0 M t 6 knm forţele tăietoare şi momentele încovoietoare în planul vertical produse de forţa kn apoi cele din planul oriontal produse de forţa 4 kn. Se obţin diagramele din figurile.8 d e f g. b c d e f Fig..8 g
34 4 REZISTENŢ MTERILELOR Exemplul. Fie bara din figura.9 a solicitată în punctul 4 de forţa F şi de cuplul concentrat Fa. Se alege sensul poitiv al axei x pentru fiecare porţiune. Se consideră porţiunea -4 încastrată în (fig..9 b) şi se calculeaă eforturile aferente. a b c d e f g Fig..9 h Se secţioneaă sistemul în se îndepărteaă bara -4 se reduc forţele ce acţioneaă asupra barei -4 în punctul capătul barei - (fig..9 c) şi se calculeaa eforturile în bara - încastrată în. Se construiesc diagramele de eforturi pentru bara -.
35 . EFORTURI ÎN BRE 5 Se secţioneaă sistemul în se îndepărteaă bara - se reduc forţele care acţioneaă asupra barei - (din fig..9 c) în punctul capătul barei - (fig..9 d) şi se calculeaă eforturile în bara - încastrată în. Diagramele de eforturi sunt preentate în figurile.9 e f g h..8 Relaţii diferenţiale de echilibru la bare curbe plane Se consideră bare curbe plane solicitate prin forţe coplanare. Fie un element infiniteimal de lungime BC ds şi raă R obţinut prin secţionarea unei bare curbe în B şi C (fig..0) solicitat de o sarcină distribuită p în direcţie radială (înlocuită prin forţa concentrată p d s aplicată la mijlocul elementului BC). Pentru echilibru în cele două secţiuni de la capete s-au introdus eforturile N T M respectiv N+dN T+dT M+dM. Fig..0 Se scriu ecuaţiile de echilibru static: ecuaţiile de proiecţii pe direcţiile forţelor N T şi ecuaţia de momente faţă de punctul C : dϕ N 0 ( N + d N ) cos dϕ + ( T + dt ) sin dϕ + p ds sin dϕ T 0 ( T + d T ) cos dϕ ( N + dn ) sin dϕ p ds cos dϕ M ( M + d M )- N R ( - cos dϕ ) + T R sin dϕ p ds R sin 0.
36 6 REZISTENŢ MTERILELOR Înlocuind sin dϕ dϕ cos dϕ făcând reducerile necesare şi neglijând infiniţii mici de ordin superior se obţine d N + T dϕ 0 d T N dϕ p ds 0 d M + T R dϕ 0. Înlocuind ds R dϕ reultă ecuaţiile diferenţiale de echilibru dn ds T R dt N dm p T. (.9) ds R ds La bare în formă de arc de cerc (Rconst.) relaţiile (.9) devin dn T dϕ dt dm N pr T R. (.0) dϕ dϕ Pentru R din ecuaţiile (.9) se obţin relaţiile diferenţiale de echilibru (.4) şi (.5) de la bare drepte..9 Diagrame de eforturi la bare curbe plane Se consideră bare în formă de arc de cerc cu raa R. Eforturile se definesc prin metoda secţionării. Forţa axială N este egală cu suma proiecţiilor pe tangenta la axa barei a forţelor care acţioneaă de o parte a secţiunii considerate. Forţa tăietoare T se calculeaă ca suma proiecţiilor pe normala la axa barei a forţelor ce acţioneaă de o parte a secţiunii. Momentul încovoietor M este egal cu suma momentelor forţelor (şi a cuplurilor concentrate) ce acţioneaă de o parte a secţiunii faţă de secţiune. Dacă bara este privită din centrul de curbură atunci convenţiile de semne pentru eforturi coincid cu cele stabilite la bare drepte. Drept linie de referinţă pentru repreentarea eforturilor se utilieaă axa barei curbe. Diagramele se construiesc astfel încât ordonatele să fie orientate pe direcţia raei (normale la axa barei). În diagrama momentelor încovoietoare momentele poitive se repreintă spre centrul de curbură pe partea barei întinsă prin încovoiere. Exemplul.4 Se vor construi diagramele de eforturi la bara semicirculară din fig.. a. Se calculeaă reacţiunile H F V F V F.
37 . EFORTURI ÎN BRE 7 Fig.. Se scriu expresiile analitice ale eforturilor într-o secţiune oarecare : N N F F F sin ϕ cosϕ T F cosϕ sin ϕ + M F R sin ϕ F F cosα T sin α F R ( - cosϕ ) F M R. ( - cosα )
38 8 REZISTENŢ MTERILELOR Se calculeaă valorile eforturilor în secţiunile şi : F N T F N M 0 F T 0 M 0 N ε F N 0 +ε T F F R M. Se traseaă mai întâi aproximativ diagramele N T M unind cu linii continue ordonatele punctelor obţinute pe baa valorilor de mai sus. Se observă că T 0 la ϕ arctg 6º0. În această secţiune se calculeaă N max 8 F şi M max 0 68 F R după care se corecteaă diagramele (fig.. b c d).. Pentru claritate la diagramele T şi M s-a inversat convenţia de semne. stfel forţele tăietoare poitive apar pe partea concavă a barei iar momentele încovoietoare poitive apar pe partea convexă a barei.
39 . TENSIUNI ŞI DEFORMŢII SPECIFICE Eforturile în bare sunt mărimi convenţionale aplicate în centrele de greutate ale secţiunilor transversale ale barelor fiind independente de forma şi dimensiunile acestora. În realitate solicitările interioare se manifestă prin acţiuni distribuite pe toată suprafaţa secţiunii transversale. Ele se caracterieaă prin tensiuni normale şi tensiuni tangenţiale care repreintă forţele interioare pe unitatea de suprafaţă. Dimensionarea componentelor maşinilor şi construcţiilor metalice se baeaă pe valori admisibile ale tensiunilor care pot acţiona într-un material supus la sarcini exterioare. Pentru corpuri de grosimi mici şi cu anumite simetrii tensiunile se pot calcula numai din consideraţii de echilibru. În general însă tensiunile depind de deformaţiile corpurilor. Valorile locale adimensionale ale deformaţiilor corpurilor se numesc deformaţii specifice. La corpuri elastice deformaţiile specifice sunt proporţionale cu tensiunile care le produc.. Tensiuni Pentru a caracteria solicitarea din interiorul unui corp elastic determinată de aplicarea unor sarcini exterioare se secţioneaă corpul (fig.. a) şi prin separarea celor două părţi se pun în evidenţă forţele interioare care exprimă legătura între particulele din interiorul corpului situate de o parte şi de cealaltă a planului de secţionare (fig.. b). Fie un element de suprafaţă din planul secţiunii în al cărui centru de greutate P se aplică forţa F reultanta forţelor interioare ce acţioneaă pe acest element care în general este oblică faţă de elementul. Prin definiţie p F lim 0 df d repreintă valoarea tensiunii în punctul P pe suprafaţa de normală n.
40 40 REZISTENŢ MTERILELOR Tensiunile sunt mărimi tensoriale care depind atât de valoarea forţei elementare df cât şi de orientarea normalei n la suprafaţa d. Pe o suprafaţă care trece prin P dar are altă orientare în spaţiu tensiunea în punctul P este diferită. Fig.. Se descompune forţa F în trei componente Fx - în lungul normalei la suprafaţă paralelă cu axa x F şi F - în planul suprafeţei transversale. Se definesc două tipuri de tensiuni şi anume : - tensiunea normală σ Fx lim 0 x dfx d perpendiculară pe planul secţiunii transversale şi - tensiunile tangenţiale : τ F lim 0 x df d situate în planul secţiunii transversale (fig..). (.) F df τ x lim 0 d (.) Fig.. În notaţia indicială tensiunile normale au un singur indice care defineşte axa cu care sunt paralele. Tensiunile tangenţiale au doi indici. Primul indice arată direcţia normalei la planul sau faţa pe care acţioneaă tensiunea. l doilea indice arată direcţia componentei tensiunii.
41 . TENSIUNI ŞI DEFORMŢII SPECIFICE 4 Tensiunile normale σ pot fi comparate cu presiunea din fluide iar cele tangenţiale τ - cu frecările care apar în planul de separaţie în caul mişcării relative a două corpuri în contact. Tensiunile se măsoară în unităţi de forţă împărţite la unităţi de arie deobicei în MPa sau N/mm. În literatura engleă tensiunile se măsoară în psi şi ksi: psi lbf/in ; psi (pound/inch )68947 kpa; ksi kpsi MPa. O problemă centrală a Reistenţei materialelor este stabilirea legii de distribuţie a tensiunilor pe secţiunea transversală a unei bare şi determinarea valorii acestora în funcţie de sarcinile exterioare aplicate barei şi caracteristicile geometrice ale secţiunii.. Convenţii de semne pentru tensiuni Se va utilia un sistem de axe drept. Convenţia de semne pentru tensiuni se baeaă pe relaţia între direcţia normalei exterioare la o suprafaţă şi direcţiile componentelor tensiunilor care acţioneaă pe faţa respectivă. Pe o faţă poitivă (cu normala exterioară în sensul poitiv al axei) tensiunile poitive sunt dirijate în sensul poitiv al axelor de coordonate. Pe o faţă negativă tensiunile poitive sunt orientate în sensul negativ al axelor de coordonate. Deci tensiunile de întindere sunt totdeauna poitive iar tensiunile de compresiune sunt totdeauna negative. a Fig.. În figura. a s-au pus în evidenţă componentele în lungul axelor de coordonate ale tensiunilor poitive care acţioneaă pe feţele unui element de volum paralelipipedic. Pe faţa poitivă B'C'D'E' tensiunile poitive au sensul axelor de b
42 4 REZISTENŢ MTERILELOR coordonate. Pe faţa negativă OBCD tensiunile au sens contrar axelor de coordonate. Dintre cele şase componente ale tensiunilor tangenţiale se demonstreaă că numai trei sunt diferite. Fie O ' centrul paralelipipedului de laturi dx d d din figura. b în care s-au desenat numai tensiunile care acţioneaă într-un plan perpendicular pe axa O ' x' paralelă cu Ox. Se scrie ecuaţia de momente a forţelor faţă de axa O' x' d d ( dx d) ( τ dx d) 0 τ de unde reultă τ τ. Relaţii similare se stabilesc în planele xo şi O. Componentele tensiunilor tangenţiale normale la muchia comună a două plane perpendiculare între ele sunt egale şi orientate ambele fie spre muchia comună fie în sens contrar. Deci tensiunile tangenţiale sunt complementare două câte două τ x τ x τ τ τ x τ x. (.) Se spune că relaţiile (.) exprimă dualitatea sau complementaritatea tensiunilor tangenţiale. Fig..4. Relaţii între eforturi şi tensiuni Se consideră un element de suprafaţă infiniteimal d. Într-un punct P situat pe d acţioneaă tensiunea normală σ şi tensiunile tangenţiale τ şi τ (fig..4). Pe elementul de suprafaţă d acţioneaă forţele elementare σ x τ şi τ. x d x d x x x d
43 . TENSIUNI ŞI DEFORMŢII SPECIFICE 4 stfel de forţe elementare sunt distribuite pe toată suprafaţa secţiunii transversale a barei. Reducându-le în centrul de greutate al secţiunii se obţin relaţiile de echivalenţă între eforturi şi tensiuni. cestea exprimă cele şase componente ale torsorului forţelor înterioare în funcţie de tensiunile de pe elementul de suprafaţă d definit în jurul punctului de coordonate şi.: N σ d M σ d x i T τ x d Mi σ x d (.4) T τ x d Mt ( τ x τ x ) d. x.4 Sisteme de tensiuni static determinate În majoritatea problemelor din Reistenţa materialelor calculul tensiunilor se face pe baa unor ipotee simplificatoare privind deformaţiile de exemplu ipotea secţiunii plane la bare. Există însă situaţii în care tensiunile se pot calcula utiliând doar ecuaţiile de echilibru. Este caul problemelor simetrice privind recipienţi sub presiune cu pereţi subţiri sau răsucirea barelor cu pereţi subţiri de tip ţeavă. cestea sunt sisteme static determinate. Valorile tensiunilor depind numai de dimensiunile corpului studiat şi de sarcinile exterioare. Reultă formule de dimensionare în care grosimea peretelui se calculeaă pe baa unor valori admisibile ale tensiunilor maxime. Fig..5 [6].4. Vas cilindric sub presiune interioară Fie un vas cilindric de diametru D R solicitat la presiune interioară constantă p (fig..5 a). Pereţii vasului au grosime constantă mică h << D deci se consideră că tensiunile sunt constante pe grosimea peretelui.
44 44 REZISTENŢ MTERILELOR supra unui element detaşat din peretele vasului acţioneaă (fig..5 d) tensiuni normale circumferenţiale σ datorite "dilatării" vasului sub efectul presiunii interioare şi tensiuni normale longitudinale σ datorite efectului "capacelor" de la capetele vasului (fig..5). Valorile acestor tensiuni se pot calcula din ecuaţiile de echilibru axial şi circumferenţial. Echilibrul axial. Dacă se secţioneaă vasul cu un plan perpendicular pe axa longitudinală (fig..5 b) şi se ioleaă partea din dreapta aceasta trebuie să fie în echilibru sub acţiunea forţei axiale produse de presiunea p pe suprafaţa π R şi a tensiunilor longitudinale σ ce acţioneaă în peretele vasului pe suprafaţa inelară π R h. de unde reultă Ecuaţia de proiecţii a forţelor pe axa longitudinală a vasului se scrie p π R σ πr h pr pd σ. (.5) h 4 h Echilibrul circumferenţial. Se secţioneaă vasul cu un plan longitudinal oriontal care trece prin axa vasului (fig..5 c) apoi din partea superioară se detaşeaă o porţiune de lungime. Pe un element de suprafaţă R dθ acţioneaă forţa p R dθ care face unghiul θ cu oriontala. Componenta verticală este p R dθ sinθ. Suma forţelor de presiune este echilibrată de cele două forţe σ h produse de tensiunile circumferenţiale. Ecuaţia de proiecţii a forţelor pe diametrul vertical se scrie de unde reultă π pr sinθ dθ p R σ h 0 Dacă se atribuie lui pr pd σ σ max. (.6) h h σ max valoarea admisibilă σ a reultă grosimea vasului pd h. (.7) σ a În practică la această valoare se adaugă adaosuri tehnologice adaosuri de coroiune etc. deci în final grosimea vasului este mai mare decât valoarea calculată cu ajutorul formulei (.7).
45 . TENSIUNI ŞI DEFORMŢII SPECIFICE Inel subţire în rotaţie Inelul din figura.6 a are raa medie R aria secţiunii transversale şi se roteşte cu vitea unghiulară constantă ω. Pentru calculul tensiunilor circumferenţiale σ din inel se aplică principiul lui d'lembert. supra unui element de lungime R dθ (fig..6 b) acţioneaă forţa centrifugă unde ρ este densitatea materialului. df Rω dm Rω ρ R dθ Tensiunile normale produc forţe circumferenţiale componente radiale sunt echilibrate de forţa centrifugă dθ dθ σ sin σ ρ ω R dθ. Reultă valoarea tensiunii normale de întindere din inel σ ale căror σ ρ R ω ρ v (.8) unde v este vitea tangenţială a centrului secţiunii transversale. Fig..6 De notat că valoarea tensiunii normale din inelul în rotaţie este independentă de forma şi suprafaţa secţiunii transversale. Pentru o valoare maximă admisibilă a tensiunii normale din inel din relaţia (.8) se poate calcula vitea unghiulară maximă admisibilă pentru un inel de raă medie dată. Dacă ω este impus din relaţia (.8) se obţine raa inelului element constructiv de baă al volantului utiliat la uniformiarea turaţiei motoarelor cu ardere internă.
46 46 REZISTENŢ MTERILELOR.4. Învelişuri subţiri sub presiune Învelişurile sunt corpuri mărginite de două suprafeţe curbe învecinate distanţa între ele fiind mică în comparaţie cu dimensiunile suprafeţelor. În continuare se consideră învelişuri de rotaţie (axial-simetrice) sub presiune care lucreaă ca o membrană în aşa-numita "stare fără momente". În peretele învelişului există doar tensiuni normale de întindere denumite "tensiuni de membrană" uniform distribuite pe grosimea acestuia. Pentru realiarea stării fără momente trebuie îndeplinite următoarele condiţii: a) forma învelişului să fie lină fără variaţii bruşte ale raelor de curbură; b) sarcinile exterioare să fie uniform distribuite sau variabile lent excluând forţele şi momentele concentrate; c) marginile învelişului să fie astfel reemate încât reacţiunile să nu aibă componente transversale importante şi să nu apară reacţiuni momente; d) învelişul să nu aibă margini deschise libere. La un înveliş cu suprafaţa mediană de forma unui corp de rotaţie meridianele sunt liniile obţinute prin intersecţia suprafeţei cu plane care trec prin axa de rotaţie. Liniile perpendiculare pe meridiane sunt cercuri şi se numesc paralele. Fig..7 Fie un înveliş axial-simetric sub presiune (fig..7 a) încărcat simetric deci cu presiune constantă pe un cerc paralel. Se decupeaă din înveliş un element mărginit de două meridiane şi două paralele (fig..7 b) astfel încât unghiul celor două rae meridiane să fie dθ iar unghiul raelor paralele să fie dθ. Se noteaă: σ - tensiunile meridiane σ - tensiunile circumferenţiale ρ raa de curbură a
47 . TENSIUNI ŞI DEFORMŢII SPECIFICE 47 meridianului ρ raa de curbură a paralelului h - grosimea peretelui. Raa ρ face unghiul θ cu axa vasului. Se scrie echilibrul forţelor care acţioneaă asupra elementului de înveliş. supra laturilor acţioneaă forţele σ h ds şi σ h ds tangente la suprafaţa mediană unde ds ρ dθ şi ds ρ dθ. Componentele lor dirijate spre dθ centrele de curbură d sin dθ σ h ρ θ şi σ d sin h ρ θ sunt echilibrate de forţa datorită presiunii interioare p ds ds. Pentru valori mici ale unghiurilor dθ şi dθ sinusurile se pot înlocui cu unghiurile exprimate în radiani. Ecuaţia de echilibru a forţelor se scrie sau σ h ρ dθ dθ + σ h ρ dθ dθ p ρ dθ ρ dθ σ σ + ρ ρ fiind cunoscută sub numele de ecuaţia lui Laplace. p (.9) h Pentru calculul tensiunilor σ şi σ mai este necesară o ecuaţie de echilibru a cărei formă depinde de configuraţia şi încărcarea învelişului studiat. La un vas cu presiune interioară constantă se scrie echilibrul forţelor pe verticală (fig..7 a) unde raa cercului paralel Reultă π r h σ sinθ p π r r ρ sinθ. apoi din relaţia (.6) se calculeaă σ. p ρ σ (.0) h.4.4 Răsucirea unui tub circular subţire Răsucirea barelor este o problemă static nedeterminată aşa cum este tratată în general în Capitolul 6. Totuşi dacă raa unui tub circular este mare în comparaţie cu grosimea (de ex. de ece ori mai mare) atunci se poate considera că tensiunile sunt constante pe grosimea peretelui iar problema devine static determinată.

48 48 REZISTENŢ MTERILELOR În figura.8 un tub de raă medie R şi grosime a peretelui h este solicitat la răsucire de cupluri egale şi de sens contrar M t aplicate la capete. Secţionând tubul cu un plan perpendicular pe axa longitudinală în secţiunea transversală se introduc tensiuni tangenţiale care din motive de simetrie au valoare constantă în lungul conturului. Fig..8 Ecuaţia de echilibru a momentelor ce acţioneaă asupra unei părţi a barei se scrie M t τ πr h R de unde se obţine expresia tensiunilot tangenţiale din tubul răsucit M t τ. (.) π h R.4.4 Forfecarea unui bolţ În îmbinarea cu tijă găurită şi furcă din figura.9 a bolţul este forfecat ca în figura.9 b. Se consideră că tensiunile tangenţiale τ sunt uniform distribuite pe suprafeţele de forfecare (ceea ce contravine complementarităţii tensiunilor tangenţiale). Fig..9
49 . TENSIUNI ŞI DEFORMŢII SPECIFICE 49 Valoarea medie este F τ (.) unde este suprafaţa secţiunii transversale a bolţului. legând o valoare maximă admisibilă pentru τ cu ajutorul formulei (.) se dimensioneaă bolţul..5 Deformaţii specifice Se consideră un corp deformabil reemat astfel încât să nu se poată deplasa ca un corp rigid (fig..0). În acest ca deplasările punctelor materiale din corp vor fi produse numai de deformaţiile care apar sub efectul sarcinilor exterioare aplicate..5. lungirea specifică.0). Fie punctele B şi C situate la distanţa în corpul elastic nedeformat (fig. Fig..0 După aplicarea sarcinilor exterioare corpul se deformeaă punctul B deplasându-se in B' iar C în C'. Distanţa între cele două puncte devine '. Diferenţa între lungimea finală ' şi cea iniţială a segmentului considerat se numeşte alungire: '. (.)
50 50 REZISTENŢ MTERILELOR medie: Raportul între alungirea şi lungimea iniţială se numeşte alungire specifică ε m. (.4) La limită când 0 se obţine alungirea specifică în punctul B pe direcţia BC: ε BC lim. (.5) 0 În general alungirea în punctul B pe altă direcţie este diferită. lungirile specifice ε sunt produse de tensiuni normale σ şi determină modificarea volumului corpului elastic..5. Lunecarea specifică Fie unghiul drept format de segmentele OD şi OE în corpul elastic nedeformat (fig..0). După aplicarea sarcinilor exterioare punctele se deplaseaă iar unghiul considerat devine D'O'E'. Unghiul γ m care măsoară variaţia unghiului de 90 o în urma deformaţiei corpului se numeşte (unghi de) lunecare medie: γ m DOE - D'O'E'. (.6) La limită când segmentele OD 0 OE 0 se obţine (unghiul de) lunecarea specifică în punctul O în planul DOE: ( DOE D' O' E' ) γ lim (.7) DOE OD 0 OE 0 Lunecările specifice γ sunt produse de tensiunile tangenţiale τ şi determină modificarea formei corpului. Între deformaţii specifice şi deplasările punctelor corpului elastic se stabilesc relaţii geometrice (cinematice). Eliminând deplasările se obţin relaţii de compatibilitate între alungirile specifice şi lunecările specifice..5. Relaţii între deformaţii specifice şi deplasări Fie un element de dimensiuni dx d şi grosime egală cu (fig..) detaşat dintr-un corp elastic. Sub acţiunea sarcinilor aplicate apar două feluri de

51 . TENSIUNI ŞI DEFORMŢII SPECIFICE 5 deformaţii care vor fi tratate separat: lungimile laturilor se modifică (fig.. a) iar elementul se distorsioneaă laturile sale rotindu-se relativ (fig.. b). Latura B de lungime iniţială dx se deplaseaă în poiţia 'B' alungirea u sa fiind egală cu diferenţa deplasărilor capetelor u + dx u. Împărţind x alungirea la lungimea iniţială se obţine alungirea specifică pe direcţia x apoi printr-un calcul analog alungirea specifică pe direcţia u ε x x ε v. (.8) a Fig.. b Pentru calculul lunecării specifice se consideră variaţia unghiului drept v BD (fig.. b). Rotirea laturii B este α x tg α x în timp ce rotirea x u laturii D este α. Variaţia totală a unghiului drept BD este lunecarea specifică în planul xo v u γ x α x α +. (.9) x Lunecările specifice sunt poitive atunci când unghiul drept descreşte. Pentru un element paralelipipedic cu laturile dx d d se stabilesc relaţiile u ε x x u v γ x + x ε v w γ v + γ x γ x γ w ε γ γ x γ x. w u γ x + (.0) x
52 5 REZISTENŢ MTERILELOR Eliminând deplasările din relaţiile (.0) se obţin relaţii între deformaţiile specifice numite ecuaţii de compatibilitate. În planul xo se obţine ε x ε + x γ x. (. a) x Se mai stabilesc relaţii de forma ε γ x γ γ x x + +. (. b) x x.6 Relaţii între tensiuni şi deformaţii specifice Pentru solicitări de mică intensitate şi la o serie de materiale utiliate în practica inginerească între tensiuni şi deformaţii specifice se stabilesc relaţii liniare cunoscute sub numele de legea lui Hooke. Relaţia între tensiuni normale şi alungiri specifice are forma σ E ε (.) unde E este modulul de elasticitate longitudinal (modulul lui Young) al materialului. Relaţia între tensiuni tangenţiale şi lunecări specifice are forma τ G γ (.) unde G este modulul de elasticitate transversal (modulul de forfecare) al materialului. Deoarece deformaţiile specifice sunt mărimi adimensionale modulele de elasticitate au aceleaşi dimensiuni ca tensiunile deci se măsoară în unităţi de forţă împărţite la unităţi de suprafaţă sau în Pascal. Valori uuale la oţel sunt E0 GPa şi G8 GPa. Pentru alte materiale se dau valori orientative în Tabelul.. Tabelul. Materialul E G GPa GPa oţeluri cupru aluminiu sticlă polistiren Relaţiile între tensiuni şi deformaţii specifice pentru starea tridimensională de tensiuni sunt preentate în Capitolul 9.
53 4. CRCTERISTICI MECNICE L ÎNCĂRCĂRI MONOTONE O serie de încercări mecanice relativ simple sunt folosite pentru evaluarea proprietăţilor materialelor. Reultatele sunt utiliate în proiectarea inginerească şi ca baă în compararea şi alegerea materialelor. Încercările la tracţiune se fac pentru evaluarea constantelor elastice a reistenţei ductilităţii şi întăririi materialelor. Se determină modulul de elasticitate E ca o măsură a rigidităţii limita de curgere σ c care defineşte reistenţa la apariţia deformaţiilor plastice şi reistenţa la tracţiune σ r cea mai mare tensiune convenţională care poate exista în material. Coeficientul lui Poisson ν poate fi calculat dacă se măsoară şi deformaţia specifică transversală. lungirea la rupere caracterieaă ductilitatea materialului capacitatea de a se deforma fără să se rupă. Coeficientul de reistenţă K şi coeficientul de ecruisare n caracterieaă materialele cu întărire deformate elasto-plastic. Încercările la compresiune se fac pentru evaluarea unor proprietăţi similare la materiale solicitate în principal la compresiune ca betonul şi piatra de construcţii sau la materiale fragile ca sticla şi ceramicele. Încercarea de reistenţă la forfecare pură permite măsurarea modulului de elasticitate transversal G a limitei de curgere şi a reistenţei de rupere la forfecare pură. Încercările de duritate reilienţă încovoiere sau răsucire nu fac obiectul acestui curs. 4. Încercarea la tracţiune monoaxială Pentru stabilirea relaţiei între tensiunile normale σ şi alungirile specifice ε se face încercarea la tracţiune (la materiale metalice conform SR EN 000-). Se utilieaă o epruvetă având forma din figura 4. la care se cunoaşte aria
54 54 REZISTENŢ MTERILELOR secţiunii transversale iniţiale o în porţiunea centrală calibrată şi pe care se marcheaă două repere la distanţa L o. Fig. 4. Epruveta se obţine în general prin prelucrarea unei probe dintr-un semifabricat turnat. Produsele cu secţiuni constante (profile bare sârme etc.) precum şi epruvetele brute turnate (de exemplu: fonte aliaje neferoase) pot fi supuse încercării fără a fi prelucrate. Secţiunea transversală a epruvetelor poate fi circulară pătrată dreptunghiulară inelară sau în cauri speciale de alte forme. Fig. 4. Epruveta se monteaă într-o maşină de încercat la tracţiune cu ajutorul căreia se aplică pe direcţia axei longitudinale o forţă de întindere F care în timpul încercării creşte continuu fără şoc sau vibraţii până se produce ruperea epruvetei. Concomitent se măsoară distanţa între repere L respectiv alungirea (extensia) epruvetei L L L cu ajutorul unui extensometru. o
55 4. CRCTERISTICI MECNICE MONOTONE 55 Dacă se repreintă grafic forţa de întindere F în funcţie de alungirea L se obţine o diagramă care depinde de dimensiunile epruvetei deci care nu caracterieaă numai comportarea materialului încercat. F Dacă se repreintă grafic dependenţa între tensiunea normală σ şi L alungirea specifică ε atunci se obţine curba caracteristică a materialului L o (fig. 4.) denumită şi diagrama încercării la tracţiune. ceasta este o curbă convenţională deoarece tensiunea se calculeaă pe baa ariei secţiunii iniţiale a epruvetei iar alungirea specifică - pe baa lungimii iniţiale între repere L o mărimi mai uşor de măsurat. De notat că în unele manuale de Reistenţa materialelor şi în unele standarde de încercări de materiale (de exemplu: STS ) mărimea L L L se numeşte lungire iar ε se numeşte lungire specifică sau alungire. L o L o o o 4.. Caracteristici mecanice la încărcări monotone Pe curba din figura 4. care corespunde unui oţel cu conţinut redus de carbon s-au marcat câteva puncte importante ale căror ordonate definesc unele caracteristici mecanice ale materialului. a) Limita de proporţionalitate σ p este valoarea tensiunii până la care relaţia între σ şi ε este liniară (ordonata punctului ). Ecuaţia porţiunii O a curbei caracteristice se poate scrie sub forma legii lui Hooke (.) σ E ε (4.) a cărei pantă E este modulul de elasticitate longitudinal al materialului. b) Limita de elasticitate σ e este valoarea tensiunii până la care materialul se comportă elastic (ordonata punctului B) deci până la care deformaţiile sunt reversibile. La unele materiale se defineşte o limită de elasticitate convenţională σ. ceasta repreintă valoarea tensiunii la care apar local primele deformaţii 00 plastice căreia îi corespunde după descărcarea epruvetei o alungire specifică remanentă de 00% (00 µ m / m ). Pentru majoritatea materialelor utiliate în construcţia de maşini limita de elasticitate este foarte apropiată de limita de proporţionalitate deşi cele două mărimi sunt definite diferit. De asemenea unele materiale pot avea o comportare elastică (revin după descărcare la dimensiunile iniţiale) însă neliniară. De
56 56 REZISTENŢ MTERILELOR exemplu particulele filamentare denumite whiskers pot avea deformaţii specifice elastice până la %. c) Limita de curgere aparentă σ c este valoarea tensiunii la care epruveta începe să se deformee apreciabil sub sarcină constantă (ordonata punctului C) macând apariţia deformaţiilor plastice ireversibile. Porţiunea CC' a curbei caracteristice se numeşte palier de curgere. Se disting limita de curgere superioară σ definită de valoarea tensiunii în momentul când se observă prima ch scădere a forţei aplicate epruvetei şi limita de curgere inferioară σ cl valoarea cea mai mică a tensiunii în timpul curgerii plastice neglijând în acest timp eventualele fenomene tranitorii. La unele materiale palierul de curgere nu există curba caracteristică având alura din figura 4.. Se defineşte o limită de curgere convenţională σ 0. ceasta repreintă valoarea tensiunii căreia îi corespunde după descărcarea epruvetei o alungire specifică remanentă de 0% ( mm / m ). Fig. 4. d) Reistenţa la tracţiune σ r denumită şi reistenţă la rupere este tensiunea corespunătoare forţei maxime înregistrate în cursul încercării după depăşirea limitei de curgere (ordonata punctului D din fig. 4.). Limitele şi reistenţele definite pe baa curbei caracteristice convenţionale sunt constante de material deci valori fixe ale tensiunii normale. Pentru a le distinge de tensiunile de întindere variabile σ acestea se noteaă uneori diferit. În încercarea materialelor se folosesc următoarele notaţii: reistenţa la tracţiune σ r R m limita de curgere σ c Re limita de curgere convenţională σ 0 R p 0 (conform SR EN 000-). Porţiunea C'D a curbei caracteristice se numeşte onă de întărire sau onă de ecruisare deoarece marcheaă o creştere a reistenţei opuse de material la creşterea deformaţiei plastice după depăşirea palierului de curgere.
57 4. CRCTERISTICI MECNICE MONOTONE 57 Punctul E marcheaă ruperea epruvetei. parent ruperea se produce la o valoare a tensiunii inferioară reistenţei la tracţiune. ceasta se datoreşte faptului că se traseaă o curbă caracteristică convenţională calculând tensiunea prin împărţirea forţei F la aria iniţială o a secţiunii transversale. Fig. 4.4 Când forţa se apropie de valoarea corespunătoare punctului D într-o secţiune a epruvetei apare o gâtuire ilustrată în figura 4.4 care devine tot mai pronunţată până se produce ruperea. ria secţiunii transversale scăând tensiunea reală în secţiunea de rupere creşte peste valoarea convenţională astfel că în momentul ruperii epruvetei ea are într-adevăr valoarea maximă mai mare ca σ. Curba caracteristică reală este desenată cu linie întreruptă în figura 4.. În caul când epruveta este solicitată peste limita de curgere până la tensiunea corespunătoare punctului M apoi este descărcată se constată că linia de descărcare MN este paralelă cu linia O - porţiunea iniţială a curbei caracteristice (Fig. 4.). După descărcare atunci când σ 0 epruveta nu revine la dimensiunile iniţiale. Segmentul ON ε caracterieaă deformaţia specifică plastică p (ireversibilă) în timp ce segmentul NP εe caracterieaă deformaţia specifică elastică (reversibilă) a epruvetei încărcate până la tensiunea corespunătoare punctului M. Se spune că materialul a fost încărcat elasto-plastic. La o nouă încărcare punctul care defineşte starea materialului parcurge întâi dreapta NM apoi revine pe curba MDE astfel că aparent limita de proporţionalitate corespunde punctului M. Materialul se comportă liniar până la tensiuni superioare limitei de curgere fiind ecruisat proprietate utiliată în practică. Segmentul OR măsoară alungirea specifică la rupere mărime ce caracterieaă ductilitatea materialului deci proprietatea de a se deforma mult fără să se rupă. O altă măsură a ductilităţii este coeficientul de gâtuire o u Z 00 (4.) unde u aria ultimă este aria minimă a secţiunii după rupere. o r
58 58 REZISTENŢ MTERILELOR La materialele tenace care au deformaţii plastice mari înainte de rupere porţiunea CDE a curbei caracteristice este relativ extinsă. La materialele fragile porţiunea CDE lipseşte ruperea producându-se fără apariţia deformaţiilor plastice. În practica inginerească se urmăreşte ca tensiunile maxime din piese să nu depăşească limita de curgere - la materiale tenace sau reistenţa la rupere - în caul materialelor fragile. ceste două caracteristici mecanice ale materialelor stau la baa definirii reistenţelor admisibile tensiunile maxime ce pot exista într-un corp şi a sarcinilor limită ce pot acţiona asupra unui element de structură sau maşină în condiţii date de funcţionare şi mediu ambiant. Fig. 4.5 Fig. 4.6 O grupă mare de materiale printre care se pot aminti alama cuprul aliajele de aluminiu betonul şi cauciucul preintă curbe caracteristice ca în figura 4.5 cu un traseu curbiliniu până la rupere. Pentru acestea se definesc: ) modulul de elasticitate tangent dat de panta tangentei MT ; ) modulul de elasticitate secant dat de panta secantei OT. dσ E t (4.) dε MP E s (4.4) OP Deobicei se utilieaă modulul de elasticitate în origine E dat de panta tangentei OT în origine la curba caracteristică denumit modulul lui Young. Valorile modulelor E t şi E s depind de nivelul tensiunii la care se măsoară.
59 4. CRCTERISTICI MECNICE MONOTONE Formula Ramberg-Osgood În multe cauri este utilă o relaţie analitică între tensiuni şi deformaţii specifice care să descrie curba caracteristică a unui material şi în ona neliniară. Se utilieaă relaţii de forma ε ε + ε e p σ σ + β E E în care E β şi n sunt constante de material care se determină experimental. n Fig. 4.7 În calculul structurilor aeronautice este utiliată formula Ramberg-Osgood. Impunând aceeaşi pantă în origine E ceilalţi doi parametri se determină printr-o metodă de colocaţie din condiţia ca cele două curbe analitică şi experimentală să treacă prin punctele în care modulul secant este 07E respectiv 085E (fig. 4.6). unde Reultă E ε σ σ σ σ σ 0 7 n (4.5)
60 60 REZISTENŢ MTERILELOR 7 log 7 n + σ 0 7 log σ 0 85 (4.6) iar σ 0 7 şi σ 0 85 sunt ordonatele punctelor de intersecţie a curbei caracteristice cu liniile secante de pantă 07E respectiv 085E Diagrama exponentului n în funcţie de raportul σ σ este dată în figura Pe baa relaţiilor (4.5) şi (4.6) se pot defini algebric modulul secant şi modulul tangent E s + 7 E σ σ 0 7 E Et n + 7 σ σ 0 7 n n (4.7). (4.8) Reultă că sunt suficiente trei valori E σ 0 7 şi σ 0 85 măsurate pe o curbă caracteristică determinată experimental pentru a stabili relaţia (4.5) care repreintă o bună aproximare a curbei σ ε a materialului până la apariţia gâtuirii. 4. Contracţia transversală Se constată că odată cu lungirea (scurtarea) unei epruvete apare o micşorare (creştere) a dimensiunilor suprafeţei secţiunii transversale proporţională cu alungirea epruvetei. La o deformaţie specifică ε în lungul axei barei corespunde o deformaţie specifică transversală ε t ν ε (4.9) unde ν se numeşte coeficient de contracţie transversală (coeficientul lui Poisson). În general ν La oţeluri ν 0 iar la materialele utiliate curent în practică ν La cauciucuri ν 0 5. La fel la încărcări peste limita de proporţionalitate ν creşte progresiv şi tinde spre 05 la deformaţii plastice mari.
61 4. CRCTERISTICI MECNICE MONOTONE 6 Între caracteristicile elastice ale materialelor iotrope E G şi ν se stabileşte relaţia E ( + ν )G. (4.0) Cu ajutorul ei se poate calcula de exemplu G pe baa valorilor măsurate ale modulului de elasticitate longitudinal E şi coeficientului lui Poisson ν. 4. Tensiuni şi deformaţii specifice reale Datele primare obţinute prin încercarea la tracţiune sunt alungiri L măsurate la diferite valori F ale forţei de întindere aplicate epruvetei. În aplicaţii cu solicitări în domeniul elasto-plastic este util să se lucree cu tensiuni reale şi alungiri specifice reale în locul celor convenţionale. cestea se obţin împărţind forţa de întindere la aria instantanee a suprafeţei transversale şi alungirea - la lungimea instantanee între repere. 4.. Tensiunea reală Tensiunea relă este definită de relaţia ~ F σ (4.) unde este aria instantanee a secţiunii transversale a epruvetei. Tensiunile reale ~ σ pot fi exprimate în funcţie de tensiunile convenţionale σ prin relaţia ~ o σ σ. (4.) Reultă că la încercarea de întindere după apariţia gâtuirii tensiunile reale sunt mai mari decât cele convenţionale. La un material ductil înaintea ruperii tensiunile reale pot fi de două ori sau chiar mult mai mari decât cele convenţionale. 4.. lungirea specifică reală Dacă la diferite momente în timpul încercării la tracţiune lungimea între repere este L L L etc. iar alungirile instantanee corespunătoare sunt L L etc. atunci alungirea specifică totală este L
62 6 REZISTENŢ MTERILELOR iar L L. i ~ L L L Li ε (4.) L L L L La limită dacă alungirea L este măsurată în creşteri infiniteimale suma (4.) este echivalentă cu o integrală. lungirea specifică reală este L L o o ~ d L L ε ln (4.4) L L i i unde L Lo + L este lungimea instantanee între repere a epruvetei. Între alungirile specifice reale şi cele convenţionale se stabileşte relaţia ~ ε ln + ε (4.5) ( ) valabilă numai până la apariţia gâtuirii când deformaţiile specifice sunt constante pe toată lungimea între repere a epruvetei. lungirile specifice reale sunt ceva mai mici decât alungirile specifice convenţionale corespunătoare. Diferenţa devine importantă la o deformaţie specifică convenţională de 0% pentru care ~ ε ln ( + 0 ) Ipotea constanţei volumului Deoarece volumul metalelor se modifică puţin (sub /000) la deformaţii plastice mari se poate considera că în acest ca volumul epruvetei rămâne o L constant deci o L o L const. sau. L Reultă şi sau o ~ L o ε ln ln (4.6) L o ( ε ) ~ σ σ + (4.7) ~ L σ F (4.7 a) L o o
63 4. CRCTERISTICI MECNICE MONOTONE 6 relaţii valabile numai până la apariţia gâtuirii şi numai dacă deformaţiile elastice sunt neglijabile faţă de cele plastice Curba caracteristică reală lungirea specifică reală totală poate fi scrisă ca suma a două componente una liniar-elastică cealaltă neliniară plastică ~ ε ~ ε + ~ ε. (4.8) e Pentru multe metale dacă se repreintă în coordonate logaritmice tensiunea reală ~ σ în funcţie de alungirea specifică reală plastică ~ε reultă o linie dreaptă deci se poate admite o relaţie de forma sau atribuită lui Hollomon (945). p ( ~ ε ) n ~ σ K (4.9) p n ~ ~ ε p σ (4.9 a) K În relaţia (4.9) K este coeficientul de reistenţă iar n este coeficientul de ecruisare la tracţiune (conform SR ISO 075 pentru table şi beni metalice). De notat că exponentul n este diferit de cel din formula (4.5). Un oţel cu σ r 440 MPa şi σ c 60 MPa are K 77 MPa şi n 09. În general n Valori ale lui n sub 0 sunt considerate mici iar valori peste 0 sunt considerate mari. Din (4.8) reultă alungirea specifică reală totală n ~ ~ ~ σ σ ε + (4.0) E K relaţie care permite o descriere analitică a curbei caracteristice reale (fig. 4.8). O relaţie asemănătoare este utiliată în caul încărcărilor ciclice ale materialelor. De notat că în relaţia (4.0) s-a utiliat modulul de elasticitate longitudinal E calculat ca panta în origine a curbei caracteristice convenţionale. Se poate arăta că modulul de elasticitate real calculat din relaţia E ~ ~ σ ~ ε diferă nesemnificativ de modulul E σ ε calculat pe baa curbei convenţionale mai uşor de măsurat. La alungiri specifice mari în secţiunea gâtuită apare o stare de tensiuni triaxială. Datorită coexistenţei unor tensiuni circumferenţiale tensiunile axiale sunt p
64 64 REZISTENŢ MTERILELOR mai mari fapt de care se ţine cont prin factorul de corecţie B introdus de Bridgman (944). Tensiunea reală se calculeaă din relaţia σ B ~ σ (4.) ~ B unde pentru 05 ε ~ factorul lui Bridgman este B log ~ ε. (4.) Fig. 4.8 Coordonatele punctului de rupere de pe curba caracteristică reală (fig. 4.8) sunt ~σ f - reistenţa la rupere reală şi ~ε f - alungirea specifică la rupere reală o măsură a ductilităţii materialului În general ~ ε f Încercări la compresiune şi la forfecare Încercarea la compresiune se face în primul rând pentru materiale a căror comportare la compresiune diferă de cea la întindere şi uneori la materiale utiliate să preia solicitări de compresiune. Epruvetele sunt în general cilindrice cu raportul lungime/diametru până la. Materialele fragile cum sunt fonta betonul piatra de construcţie şi unele materiale ceramice sunt încercate până la rupere. Ruperea la compresiune este în general produsă de tensiunile tangenţiale astfel că suprafeţele de rupere sunt înclinate faţă de axa epruvetei. Materialele tenace nu se rup la compresiune. Curba
65 4. CRCTERISTICI MECNICE MONOTONE 65 carcteristică la compresiune a metalelor ductile preintă o porţiune iniţială identică cu cea a curbei caracteristice la tracţiune încercarea făcându-se până la curgere. În general prin încercarea la compresiune a oţelurilor (conform STS 55-78) se obţin aceleaşi valori pentru σ p σe σc şi E ca la încercarea la întindere. Totuşi dacă o bară de oţel ecruisată prin întindere este încercată ulterior la compresiune se constată că limita de curgere la compresiune este inferioară celei determinate prin încercarea de întindere fenomen cunoscut sub denumirea de "efect Bauschinger". Relaţia între tensiunile tangenţiale τ şi lunecările specifice γ se poate stabili prin încercarea de reistenţă la forfecare pură (conform STS ). În domeniul liniar aceasta are forma legii lui Hooke (.) τ G γ (4.) unde G este modulul de elasticitate transversal al materialului. Se utilieaă aşa-numita epruvetă Iosipescu cu două crestături unghiulare transversale cu feţele formând unghiuri de 90 o şi de adâncime egală cu /4 din înălţime (Fig. 4.9). ceasta asigură aplicarea unei solicitări de forfecare pură cu o distribuţie practic uniformă a tensiunilor tangenţiale pe toată înălţimea secţiunii. Fig. 4.9 Măsurarea lunecărilor specifice γ produse sub acţiunea tensiunilor tangenţiale din secţiunea de forfecare pură în domeniul elastic se realieaă prin măsurarea alungirilor specifice ε şi ε din direcţiile principale (v. Cap. 9) înclinate la 45 0 ( γ max ε ε ). Pentru determinarea alungirilor specifice se utilieaă tensometria electrică reistivă.
66 66 REZISTENŢ MTERILELOR Epruveta este solicitată la încovoiere (Fig. 4.0) cu variaţie liniară a momentului încovoietor şi cu moment nul în secţiunea în care se produce ruperea prin solicitare la forfecare pură. Prin forfecare pură se înţelege solicitarea produsă numai de tensiuni tangenţiale paralele cu o singură direcţie din planul unei secţiuni transversale a unei piese fără ca pe acea secţiune să acţionee tensiuni normale (v. Cap.9). Fig. 4.0 Se traseaă o diagramă a încercării la forfecare a cărei pantă în origine este modulul de elasticitate transversal G. Fig. 4. Fig. 4.
67 4. CRCTERISTICI MECNICE MONOTONE Efectul temperaturii şi viteei de deformare În general odată cu creşterea temperaturii curba caracteristică a unui metal este mai înclinată (deci modulul de elasticitate scade) şi ajunge la tensiuni mai mici (deci limita de curgere scade) (fig. 4.). Creşterea viteei de deformare ε dε dt duce la o creştere aparentă a modulului de elasticitate şi a limitei de curgere convenţionale (fig. 4.) la multe materiale. 4.6 Reistenţe admisibile În reolvarea problemelor de Reistenţa materialelor după modelarea piesei sau a sistemului real şi determinarea caracteristicilor mecanice ale materialului utiliat se pune problema preciării valorii maxime admisibile a tensiunilor din piesa studiată denumită reistenţă admisibilă. Reistenţa admisibilă este valoarea convenţională aleasă în calcule pe baa experienţei practice pentru tensiunea maximă care se poate produce într-o piesă în condiţii date de material de solicitare şi de mediu ambiant. Însă aceste condiţii în general nu sunt cunoscute perfect. Determinarea sarcinilor este aproximativă fiind posibilă depăşirea valorilor considerate în calcule. Există incertitudini privind condiţiile de mediu ambiant în special temperatura. Caracteristicile mecanice ale materialelor pot varia faţă de valorile cunoscute iar schema de calcul poate duce la o subapreciere a nivelului real de solicitare a piesei. ceasta impune o anumită precauţie în alegerea reistenţelor admisibile pentru a avea siguranţa că în condiţiile cele mai deavantajoase de lucru piesa îndeplineşte funcţiile pentru care a fost proiectată: nu se rupe nu are deformaţii remanente mari este suficient de rigidă şi nu-şi pierde stabilitatea formei de echilibru. Considerând că la materialele tenace curgerea repreintă o stare limită care nu trebuie atinsă iar la materialele fragile - ruperea se aleg coeficienţii de siguranţă supraunitari la care se împarte limita de curgere σ c respectiv reistenţa la rupere σ r pentru a se calcula reistenţa admisibilă σ a. Reistenţele admisibile se definesc prin relaţiile σ σ a c c c σ r σ a (4.4) c unde c c este coeficientul de siguranţă faţă de curgere iar c r - coeficientul de siguranţă faţă de rupere. r
68 68 REZISTENŢ MTERILELOR Cu cât ipoteele de calcul sunt mai apropiate de realitate sarcinile sunt evaluate mai corect iar proprietăţile materialelor sunt cunoscute mai bine cu atât coeficienţii de siguranţă se pot alege mai mici şi - corespunător - reistenţele admisibile se pot alege mai mari. În domeniul construcţiilor metalice unde se utilieaă frecvent bare din oţeluri tenace starea limită este considerată curgerea iar reistenţele admisibile se stabilesc funcţie de limita de curgere σ. Deobicei σ 50 MPa dar se utilieaă c şi laminate cu σ c 45 MPa. Normele ISC SD [7] recomandă următoarele valori ale reistenţelor admisibile în special pentru profile corniere: a) la întindere σ at 0 6 σ c ; b) la forfecare τ af 0 4 σ c ; c) la încovoiere σ ai 0 66 σ c Stabilirea valorilor reistenţelor admisibile face obiectul cursului de Organe de maşini. În problemele de Reistenţa materialelor valorile reistenţelor admisibile sunt date fără comentarii. Valori orientative sunt preentate în nexa. Metoda de calcul pe baa reistenţelor admisibile este larg utiliată în construcţia de maşini unde apar frecvent probleme dinamice şi unde modelarea piesei reale este mai dificilă. La calculul construcţiilor este mai larg răspândită metoda capacităţii portante (metoda sarcinilor limită) baată pe valori maxime admisibile ale sarcinilor exterioare aplicate structurilor. c
69 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR O bară dreaptă este solicitată la întindere (compresiune) dacă în secţiunea transversală acţioneaă o forţă axială. tunci când în lungul barei sunt aplicate mai multe forţe este necesară construcţia diagramei forţelor axiale. Problemele de întindere pot fi static nedeterminate atunci când reacţiunile şi eforturile din bare nu pot fi determinate numai din condiţii de echilibru. Ele apar la sisteme cu interacţiuni între componente cu rigidităţi diferite la grini cu ăbrele şi poduri suspendate pe cabluri la probleme cu dilatări împiedicate sau cu constrângeri de deplasări. În general pentru reolvarea problemelor static nedeterminate este necesară utiliarea a patru tipuri de relaţii: ) ecuaţii de echilibru; ) ecuaţii care descriu geometria deformaţiilor sau compatibilitatea între deformaţii specifice şi deplasări; ) ecuaţii constitutive între tensiuni şi deformaţii specifice sau între forţe şi deplasări; şi 4) condiţii la limită de reemare sau de solicitare pe contur. În continuare se va ilustra aplicarea acestor ecuaţii la probleme de întindere. 5. Tensiuni şi deformaţii la întindere Fie bara din figura 5. solicitată de forţa F. În secţiunea x forţa axială N F. Se observă că după aplicarea forţei F secţiunea BC are o deplasare axială x dar rămâne plană şi perpendiculară pe axa barei deci ipotea lui Bernoulli este valabilă. Reultă că alungirea specifică este aceeaşi în toate punctele secţiunii transversale: x ε const. x şi conform legii lui Hooke σ E ε const.
70 70 REZISTENŢ MTERILELOR deci tensiunile normale produse de întindere sunt uniform distribuite pe secţiunea transversală a barei. Fig. 5. Fig. 5. Reultanta forţelor elementare σ d de pe toate elementele infiniteimale d ale secţiunii este forţa axială N: N σ d σ d σ deci formula tensiunilor normale de întindere sau compresiune este lungirea porţiunii de bară de lungime x este: σ N x x ε x x E E care pentru o bară de lungime se scrie: unde produsul N σ (5.) N dx (5.) E E se numeşte modùl de rigiditate la întindere. Pentru tronsoane de bară la care N const. şi E const. alungirea este N (5.) E
71 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 7 Relaţia (5.) este utiliată sub următoarele forme: - formula de dimensionare: - formula de verificare: σ - formula forţei capabile: N nec ef cap N ; (5.4 a) σ a N σ a ; (5.4 b) σ. (5.4 c) a În relaţiile (5.4) compresiune. σ a este reistenţa admisibilă la întindere sau la 5. Energia de deformaţie la întindere lungirea unei porţiuni de bară de lungime x este x N x E mecanic produs de forţa axială N pe deplasarea elementară d ( x) este deci lucrul E N d ( x) x d ( x). x Dacă solicitarea este statică lucrul mecanic efectuat de sarcinile exterioare se transformă în energie potenţială de deformaţie: x ( x) E E N x U x d ( x) N x. x x E 0 ceasta este egală cu aria supafeţei de sub diagrama forţă-alungire (fig. 5.). Pentru un element de bară de lungime d x energia de deformaţie este N dx du deci energia înmagainată de întreaga bară se poate scrie: E U N dx. (5.5) E Pe baa relaţiei (5.) notând d V dx se mai obţine U V σ dv. (5.5 a) E
72 7 REZISTENŢ MTERILELOR unde U 0 σ este energia de deformaţie specifică (în unitatea de volum). E 5. Sisteme static nedeterminate La sisteme static nedeterminate (sisteme hiperstatice) reacţiunile şi eforturile din bare nu pot fi determinate numai cu ajutorul ecuaţiilor de echilibru din statică. Pentru reolvarea problemelor static nedeterminate este necesar să se stabilească patru tipuri de ecuaţii: de echilibru de compatibilitate geometrică relaţii forţă-deformaţii şi condiţii la limită. 5.. Compatibilitatea între deplasări şi deformaţii Se consideră o bară i-j articulată la capete (fig. 5.) deci solicitată axial element component al unei structuri deformabile (de ex.: grindă cu ăbrele). Bara face iniţial unghiul α cu axa X a sistemului de referinţă XOY. Ca urmare a deformării structurii sub acţiunea sarcinilor exterioare bara se deformeaă iar capetele i şi j se deplaseaă în i' şi j'. Fig. 5. Se noteaă U i Vi şi U j V j componentele deplasărilor capetelor barei pe axele X Y respectiv ui v i şi u j v j componentele deplasărilor capetelor pe axele x. Între alungirea barei ij şi deplasările capetelor barei u i u j se stabileşte condiţia de compatibilitate în sistemul local de coordonate xo: u u. (5.6) ij j i
73 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 7 În general este convenabil să se lucree cu componentele deplasărilor în sistemul global de coordonate XOY. Deoarece u U cosα + V sinα u i j i U j i cosα + V sinα condiţia de compatibilitate geometrică (5.6) devine ( U U ) cosα + ( V V ) sinα j (5.7). (5.8) ij j i Relaţia (5.8) va fi utiliată în reolvarea problemelor static nedeterminate prin metoda deplasărilor. j i 5.. Sisteme cu restrângeri de deplasări Barele drepte cu articulaţii fixe la capete solicitate axial şi barele cu dilatări împiedicate sunt sisteme static nedeterminate 5... Bara cu articulaţii fixe la capete Fie bara din figura 5.4 cu articulaţii fixe la capete solicitată de forţa F aplicată în secţiunea. Se cer tensiunile din bară. Fig. 5.4 Reacţiunile din articulaţii sunt H şi H. Ecuaţia de echilibru. Ecuaţia de proiecţii pe oriontală a forţelor se scrie H F + H 0. (5.9) Compatibilitatea deformaţiilor. În urma aplicării forţei F secţiunea se deplaseaă în ' deci "cât se întinde porţiunea - atât se comprimă porţiunea -"
74 74 REZISTENŢ MTERILELOR. (5.0) Relaţiile forţă-deformaţie. Pe baa legii lui Hooke s-a stabilit expresia (5.) a alungirilor care pentru cele două porţiuni de bară se scrie N a E Din diagrama forţelor axiale reultă N b. (5.) E N H N H F H Din relaţiile (5.0)-(5.) se obţin valorile reacţiunilor b H F deci tensiunile din bară au expresiile. (5.) a H F (5.) N F b N σ F a σ. (5.4) Tensiunile poitive sunt de întindere iar cele negative sunt de compresiune Tensiuni termice Într-o bară de secţiune constantă articulată sau încastrată la capete (fig. 5.5 a) încălită uniform (pentru evitarea încovoierii) cu t (grade) apar tensiuni de compresiune datorită împiedicării dilatării. Dacă bara ar fi liberă la capete datorită încălirii s-ar dilata liber alungindu-se cu α t (5.5) unde α este coeficientul de dilatare termică liniară al materialului barei. Împiedicarea dilatării este echivalentă cu aplicarea unei forţe de compresiune N care readuce bara la lungimea iniţială deci o comprimă cu Egalând expresiile (5.5) şi (5.6) reultă N. (5.6) E N α t E de unde se obţine formula tensiunilor termice produse de dilatarea împiedicată
75 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 75 N σ E α t (5.7) care în acest ca nu depind de aria suprafeţei secţiunii transversale. La bara cu secţiunea variabilă în trepte din figura 5.6 încălită uniform cu diferenţa de temperatură t un raţionament analog conduce la condiţia deci tensiunile termice sunt ( ) N N + α t E E N + N + σ E α t ; σ E α t. + + Fig. 5.5 Fig Interacţiunea între componente cu rigidităţi diferite În continuare se vor da exemple de probleme static nedeterminate pentru sisteme cu elemente componente de rigidităţi diferite. Primele două probleme vor fi reolvate prin metoda forţelor în care necunoscutele sunt reacţiuni sau forţe în bare. Următoarele două probleme se vor reolva prin metoda deplasărilor în care necunoscutele primare sunt deplasări forţele din bare şi tensiunile fiind calculate ulterior Bara cu secţiune eterogenă Se cer tensiunile produse de forţa F în bara din figura 5.7 compusă din două materiale diferite (ex.: stâlp din beton armat cablu de aluminiu cu inimă de oţel etc.) desenate separat pentru simplificarea expunerii. Se cunosc modulele de rigiditate la întindere E şi E.
76 76 REZISTENŢ MTERILELOR Reolvare Ecuaţia de echilibru. Forţa exterioară F este preluată în proporţii diferite de cele două materiale. Suma forţelor axiale N şi N egaleaă forţa totală: N + N F. (5.8) Compatibilitatea deformaţiilor. Cele două materiale cu aceeaşi lungime iniţială au deformaţii identice fiind solidariate între ele:. (5.9) Relaţiile forţă-deformaţie. Pe baa legii lui Hooke s-a stabilit expresia (5.) a alungirilor care pentru cele două materiale se scrie N E N. (5.0) E Fig. 5.7 Fig. 5.8 Înlocuind relaţiile (5.0) în (5.9) şi utiliând ecuaţia (5.8) se obţine N E N E N + N E + E F. E + E
77 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 77 Reultă tensiunile în cele două materiale N F N F σ ; σ. (5.) E E + + E E Dacă se cunosc reistenţele admisibile la întindere ale celor două materiale σ şi se cere forţa capabilă de întindere se calculeaă a σ a F' E σ a + ; E F" E + E σ a şi se alege F cap egală cu cea mai mică dintre cele două valori F ' şi F " Sistem de bare paralele Se consideră o bară rigidă OB (fig. 5.8 a) suspendată de două bare elastice (tiranţi) şi articulată în O. Se cer tensiunile în barele verticale articulate la capete. Ecuaţia de echilibru. Iolând bara rigidă şi evidenţiind forţele care acţioneaă asupra ei (fig. 5.8 b) se scrie ecuaţia de momente faţă de punctul O : T a + T b F c. (5.) Compatibilitatea deformaţiilor. Ecuaţia deformaţiilor se scrie pe baa condiţiei ca după aplicarea forţei F bara rigidă OB să rămână rectilinie (fig. 5.8 c) când barele verticale se alungesc: scrie a b. (5.) Relaţiile forţă-deformaţie. Pentru cele două bare verticale ecuaţia (5.) se T T. (5.4) E E Înlocuind relaţiile (5.4) în (5.) şi utiliând ecuaţia (5.) se obţin întâi forţele T şi T apoi se calculeaă tensiunile în bare: T σ T σ b a c a b c E E F E E F + + a c b c ;. (5.5)
78 78 REZISTENŢ MTERILELOR 5... Sistem de bare concurente La sistemul din figura 5.9 compus din trei bare concurente articulate la capete se cer forţele din bare şi deplasarea punctului de aplicare a forţei F. Pentru simplificarea reolvării se descompune forţa F în două componente una oriontală F F sinα şi şi una verticală F F cosα. Se consideră că deplasarea oblică δ a punctului 4 are componentele δ şi δ pe direcţiile forţelor cu acelaşi indice. Ecuaţiile de echilibru. Se scriu ecuaţiile de proiecţii ale forţelor care acţioneaă asupra articulaţiei 4 : T sinθ T sinθ F T cosθ + T + T cosθ F. (5.6) Ecuaţiile de compatibilitate geometrică. Pentru cele trei bare ţinând cont de condiţiile la limită în punctele fixe şi relaţiile între deformaţii şi deplasări (5.8) se scriu sub forma 4 δ sinθ + δ cosθ 4 δ (5.7) δ sinθ + δ cosθ. 4 Relaţiile forţă-deformaţie. Pentru cele trei bare ecuaţia (5.) se scrie T 4 E T cosθ 4 E T 4. (5.8) E Înlocuind relaţiile (5.8) în (5.7) se obţin relaţiile între eforturi şi deplasări E T ( δ sinθ + δ cosθ ) E T δ (5.9) cosθ E T ( δ sinθ + δ cosθ ) care înlocuite în (5.6) permit calculul componentelor deplasării punctului 4 din relaţiile E sin θ δ F E cos θ + δ cosθ F. (5.0)
 în ecuaţiile (5.")




79 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 79 Înlocuind componentele deplasării din relaţiile (5.0) în ecuaţiile (5.9) se obţin forţele din bare apoi prin împărţire la aria secţiunii tranversale tensiunile. Se observă că deplasarea δ a punctului de aplicare al forţei F nu are loc pe direcţia forţei deoarece forţa F nu este aplicată în lungul unei direcţii principale de rigiditate a sistemului. Fig. 5.9 Fig Sistem de bare articulate la capete Grinda cu ăbrele din figura 5.0 are articulaţii fixe în punctele şi. Se cer eforturile axiale din bare şi deplasarea punctului de aplicaţie a forţei. Barele au acelaşi modul de rigiditate la întindere E. Din geometria figurii reultă sin α 5 şi cos α 5. Se noteaă F... F 4 componentele reacţiunilor din articulaţiile fixe şi T... T5 forţele din bare. a b c d Fig. 5. Ecuaţiile de echilibru. Se ioleaă fiecare articulaţie şi se scriu ecuaţiile de proiecţii ale forţelor care acţioneaă asupra "nodului" respectiv. Pentru nodul 4 (fig. 5. a) se obţine T + T 4 F + T 5 / 5 + T + T 5 / / (5.)
80 80 REZISTENŢ MTERILELOR Pentru nodul (fig. 5. b) T + T / T / + T Pentru nodul (fig. 5. c) T + T T 5 / 5 T / / 5 F 5 + F 0. Pentru nodul (fig. 5. d) (5.) (5.) T + T / 4 F T / F (5.4) Cele 8 ecuaţii de echilibru (5.)-(5.4) conţin 9 necunoscute. Sistemul este static nedeterminat. Reolvarea se va face prin metoda deplasărilor. Ecuaţiile de compatibilitate geometrică. Pentru cele cinci bare relaţia între deformaţii şi deplasări (5.8) se scrie sub forma o o ( U U ) cos 45 + ( V V ) sin 4 (5.5) o 0 ( U U ) cos 5 + ( V V ) sin (5.6) 5 4 ( U4 U) + ( V4 V ) (5.7) 5 5 U (5.8) -U U (5.9) 4 U4 unde i Vi i...4 sunt componentele (oriontală şi verticală ale) deplasărilor nodurilor în sistemul de coordonate globale XOY. U ( ) Condiţiile la limită. În articulaţiile fixe U V U V 0 (5.40) ceea ce simplifică relaţiile (5.5)-(5.9). Relaţiile forţă-alungire. Pentru cele cinci bare ecuaţia (5.) se scrie T 4 E T4 4 E T T. E E T (5.4) E
81 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 8 Ecuaţiile (5.)-(5.4) formeaă un sistem liniar de ecuaţii cu necunoscute. Dacă se ţine cont de condiţiile la limită şi se elimină alungirile rămân două grupuri decuplate de câte patru ecuaţii. Se calculeaă întâi deplasările F F F F U V U 4 67 V E E E E apoi reacţiunile F 0 5 F F F F F F 4 F. (5.4) Înlocuind valorile reacţiunilor (5.4) în ecuaţiile de echilibru se obţin forţele axiale din bare egale şi de sens contrar forţelor care acţioneaă asupra nodurilor. 5.4 Concentrarea tensiunilor Calculul la întindere baat pe relaţia (5.) este valabil numai pentru bare de secţiune constantă deci care respectă ipotea constanţei secţiunii transversale. Discontinuităţile geometrice de exemplu variaţii în trepte ale secţiunii transversale (reducţii) găuri transversale crestături şanţuri sau scobituri laterale produc variaţii locale importante ale tensiunilor ale căror valori maxime sunt mai mari decât tensiunea medie în secţiunea transversală netă a barei. cest fenomen este denumit concentrarea tensiunilor iar discontinuitatea geometrică respectivă se numeşte concentrator de tensiuni. La un concentrator de tensiuni tensiunea maximă este funcţie de forma şi dimensiunile piesei în vecinătatea discontinuităţii. relaţia Se defineşte factorul teoretic de concentrare a tensiunilor elastice K t nom K t prin σ max (5.4) σ unde σ max este tensiunea maximă la discontinuitatea geometrică şi σ nom este tensiunea medie în secţiunea transversală respectivă. cest factor este constant în domeniul comportării elastice a materialului. În literatura tehnică (Peterson [48] Neuber [45] Frocht [4] Pilke [5]) se dau diagrame ale factorului K t în funcţie de dimensiunile concentratorului. Ele se baeaă fie pe soluţii analitice din Teoria elasticităţii sau soluţii numerice prin Metoda elementelor finite fie pe determinări experimentale cu ajutorul fotoelasticimetriei.
82 8 REZISTENŢ MTERILELOR Fig. 5. [4] Pentru o bară solicitată la întindere cu secţiune variabilă în trepte creşterea locală a tensiunilor datorită saltului de diametru este redată în figura 5.. Fig. 5. [4]

83 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 8 Variaţia factorului teoretic de concentrare a tensiunilor K t în funcţie de raportul între raa de racordare şi diametrul mic este redată în figura 5. pentru cinci valori ale raportului diametrelor celor două porţiuni. Se remarcă valori K t Rae de racordare mici produc valori K t mari deci trebuie evitate în proiectare. Distribuţia tensiunilor axiale pentru o bară cu degajări laterale semicirculare este ilustrată în figura 5.4 a iar pentru o bară cu gaură circulară transversală - în figura 5.4 b. a Fig. 5.4 b F La bara cu gaură transversală (fig. 5.4 b) fie σ tensiunile normale uniform distribuite pe o secţiune de arie situată la o anumită distanţă de discontinuitate. În secţiunea din dreptul găurii de arie < tensiunea nominală este tensiunea medie σ σ > σ. Se observă însă că în peretele găurii apar tensiuni σ max mult mai mari decât tensiunea medie σ max Kt σ nom unde K t... deoarece în vecinătatea găurii starea de tensiuni nu mai este liniară. pare un gradient de tensiune o variaţie locală bruscă a tensiunilor care scad de la valoarea maximă la nivelul

84 84 REZISTENŢ MTERILELOR găurii la o valoare inferioară tensiunii nominale la marginea barei (ariile de sub diagramele tensiunilor sunt egale). N La verificarea unei piese se calculeaă întâi σ nom pe baa ariei nete a barei în dreptul concentratorului se evalueaă apoi din diagrame factorul K t pe baa elementelor geometrice ale concentratorului şi se calculeaă tensiunea maximă σ max care în final este comparată cu reistenţa admisibilă σ a. 5.5 Tensiuni pe o suprafaţă înclinată faţă de axa barei Fie o bară solicitată la întindere (fig. 5.5) secţionată cu un plan BC înclinat cu unghiul α faţă de secţiunea transversală. Fig. 5.5 Forţa interioară din secţiunea înclinată poate fi descompusă în două componente una normală F n şi una tangenţială F t în raport cu planul BC: F n F cosα F t F sinα. ceste componente produc tensiuni normale σ şi tensiuni tangenţiale τ ale căror valori se obţin împărţind forţa respectivă la aria secţiunii înclinate secα : F F cosα F σ n cos α secα secα F F sinα F τ t sinα cosα. secα secα
85 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 85 Înlocuind F σ reultă x σ σ cos α (5.44) x τ σ x sinα cosα σ x sinα. (5.45) Din relaţia (5.44) se observă că atunci când α 0 σ are valoarea 0 maximă σ x iar când α 90 σ 0 deci în bară nu există tensiuni normale transversale. atunci când Din relaţia (5.45) reultă că τ este maxim când 0 α 90 şi 0 70 sau când 0 α 45 şi 0 5. sin α este maxim deci Reultatul se confirmă în practică. La materiale a căror reistenţă la forfecare este mai mică decât jumătate din reistenţa de rupere la tracţiune 0 încărcarea la întindere monoaxială produce ruperi la 45 în lungul planelor pe care acţioneaă tensiuni tangenţiale maxime. stfel epruvetele de fontă solicitate la 0 compresiune se fisureaă la 45 faţă de direcţia de aplicare a sarcinii. Fig. 5.6 Fig. 5.7 Exemplul 5. Să se calculee tensiunile normale în bara din figura 5.6 a cu diametrul d 5 mm solicitată axial de o forţă F kn. Reolvare Ecuaţia de proiecţii a forţelor pe oriontală este R + R F 0.
86 86 REZISTENŢ MTERILELOR Condiţia de deformaţie se scrie R R R + (5.46) E E E unde suprafeţele secţiunilor transversale ale celor două tronsoane au ariile d π 9 6 mm 4 ( 4 d ) π 8 47 mm. 4 După simplificări ecuaţia (5.46) devine deci reacţiunile au valorile R 4 9 R F 000 R 7 8 N R 4 9 R 66 N. Diagrama forţelor axiale este redată în figura 5.6 b. Tensiunile au valorile σ σ σ 4 4 N N 4 N N mm 7 8 N mm 66 N mm Deoarece bara are secţiune variabilă într-o aplicaţie concretă trebuie să se ţină cont de concentrarea de tensiuni la saltul de diametru în secţiunea. Exemplul 5. Un suport format dintr-o tijă de oţel introdusă într-un manşon din fontă este comprimat axial cu o forţă de 60 kn (fig. 5.7). Cunoscând lungimea barei 0 m aria secţiunii transversale a tijei OL 00 mm aria secţiunii manşonului Fc 800 mm şi modulele de elasticitate EOL 0 GPa şi EFc 0 GPa să se calculee tensiunile care apar în tijă respectiv manşon alungirea totală şi fracţiunile din efortul N preluate de tijă respectiv manşon. Reolvare Tensiunile se calculeaă cu relaţiile (5.).
87 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 87 N 60 0 OL EFc OL + Fc EOL N σ 9 mm N 60 0 Fc EOL Fc + OL EFc N σ 58. mm lungirea totală este N mm. 5 5 E + E OL OL Fc Eforturile preluate de cele două piese sunt N N Fc N 86 kn OL σ OL OL N 474 kn. Fc σ Fc Fc Fig. 5.8 Fig. 5.9 Exemplul 5. O bară din cupru având lungimea 8 m este încastrată la extremitatea iar extremitatea se poate deplasa liber mm pe oriontală după care deplasarea este împiedicată (fig. 5.8). Cunoscând coeficientul de dilatare termică liniară al cuprului α grd - şi modulul de elasticitate longitudinal E 0 GPa să se determine tensiunile care apar în bară la o creştere a temperaturii cu 80 o C. Reolvare Se determină întâi variaţia de temperatură t pentru care bara se dilată liber cei mm : 0 t 65 C. α
88 88 REZISTENŢ MTERILELOR 0 7 La încălirea în continuare a barei cu t este împiedicată în bară devoltându-se tensiunile (5.7) 5 σ E α t N/mm. 6 C dilatarea Exemplul 5.4 nsamblul simetric din figura 5.9 este compus din trei bare având fiecare secţiunea transversală modulele de elasticitate E şi E > E şi coeficienţii de dilatare termică liniară α şi α < α. Sub acţiunea forţei F în bare apar tensiuni de compresiune neegale. Se cere să se calculee creşterea temperaturii t prin care se realieaă egaliarea tensiunilor în bare. Reolvare Etapa I. Fie σ şi σ tensiunile în barele şi respectiv. Condiţia de echivalenţă între forţe şi tensiuni se scrie F σ + σ. Reultă o primă relaţie între tensiuni F σ + σ σ σ iar din condiţia de deformaţie ε ε o a doua relaţie între tensiuni E E E σ σ. E Se obţin tensiunile produse de forţa F : F E F E σ σ σ < σ. E + E ( E + E ) ( ) Etapa a IIa. Condiţia de deformaţie în caul dilatării împiedicate N N α t α t + E E unde N este forţa axială de interacţiune între bara centrală şi barele laterale se mai scrie sub forma ( α α ) t. E E Se adaugă relaţia între forţa axială şi tensiunile în etapa a doua σ σ
89 5. ÎNTINDERE ŞI COMPRESIUNE BRELOR 89 σ σ N de unde reultă şi semnificaţia tensiunilor notate cu steluţă. Reultă tensiunile termice ( α α ) t E E t α α E E σ σ. E + E E + E ( ) Prin suprapunerea efectelor suma tensiunilor în cele două stări trebuie să fie aceeaşi σ σ σ + σ ( α α ) ( α α ) F E t E E F E t E E + ( E + E ) E + E ( E + E ) E + E Reultă creşterea necesară a temperaturii pentru egaliarea tensiunilor t F ( E E ) ( α α ) E. E. Exemplul 5.5 Un şurub de oţel cu diametrul δ 0 mm şi pasul filetului h 6 mm este introdus într-un tub de cupru cu d mm D 8 mm şi fixat cu o piuliţă fără strângere (Fig. 5.0). Lungimea părţii active a şurubului este l 00 mm. Să se calculee tensiunile produse prin strângerea piuliţei cu o cheie şi rotirea 90 0 (un sfert de rotaţie). Se cunosc modulele de elasticitate la oţel E 08 GPa şi la cupru E 00 GPa. Reolvare La strângerea piuliţei tubul este comprimat şi şurubul este întins cu forţe egale şi de sens contrar X. Tubul este comprimat cu l iar şurubul este întins cu l. Prin rotirea piuliţei şurubul se scurteaă cu nh unde n este numărul de rotaţii complete. lungirea şurubului însumată cu scurtarea tubului egaleaă modificarea lungimii şurubului prin strângerea piuliţei egală cu numărul de rotiri ale piuliţei înmulţit cu pasul filetului. Condiţia de deformaţie se scrie sau deoarece nh << l l l nh Xl E + Xl + E nh.
90 90 REZISTENŢ MTERILELOR unde πδ π mm 4 4 ( D d ) π ( 8 ) π 47 mm 4 4. Reultă forţa axială X E Tensiunile din şurub sunt Tensiunile din tub sunt Fig. 5.0 nh + E l X 06 σ 86 MPa N. X 06 σ 4 5 MPa. 47
91 6. RĂSUCIRE BRELOR O bară dreaptă este solicitată la răsucire (torsiune) dacă în secţiunea transversală acţioneaă un moment al cărui vector este dirijat în lungul axei barei. La bare curbe răsucirea este produsă de un moment dirijat în lungul tangentei la axa barei. Piese tipice solicitate la răsucire sunt arborii maşinilor arborii cutiilor de vitee elementele elastice de tip bară de torsiune din suspensiile automobilelor şi tancurilor precum şi barele structurilor spaţiale cu capetele încastrate. Studiul răsucirii este simplificat la bare cu secţiune axial-simetrică la care este valabilă ipotea secţiunii plane şi la bare cu pereţi subţiri la care se consideră că tensiunile tangenţiale sunt constante pe grosimea peretelui. La bare cu secţiune plină de formă oarecare secţiunea transversală se deplaneaă iar studiul tensiunilor şi deplasărilor se face cu metodele Teoriei elasticităţii. Împiedicarea deplanării produce tensiuni axiale suplimentare. La răsucirea barelor cu pereţi subţiri se adoptă ipotea invariabilităţii secţiunii transversale. În general barele cu profil deschis sunt mai puţin rigide decât barele similare cu profil închis. 6. Calculul momentului de răsucire tunci când asupra unei bare acţioneaă mai multe cupluri exterioare având vectorul dirijat în lungul axei barei este necesară construcţia unei diagrame de momente de răsucire (fig..5). În unele aplicaţii se dau puterea transmisă şi turaţia unui arbore pe baa cărora trebuie calculat momentul de răsucire. Dacă un arbore transmite puterea P (kw) la turaţia n (rot/min) momentul de răsucire se calculeaă cu relaţia
92 9 REZISTENŢ MTERILELOR deci M t şi deci reultă P M t 9550 [Nm]. n Dacă se cunoaşte puterea N (CP) şi turaţia n (rot/min) atunci N M t 706 [Nm]. n Relaţiile de mai sus se baeaă pe formula puterii în mişcarea de rotaţie: Puterea Cuplul Vitea unghiulară puterea [W ] 000 puterea [kw] P [Nm]. vitea unghiulara [rad/s] π π n turatia [rot/min] 0 M t Deoarece 0 [Nm] π kgf m N m CP W 076 kw s s P [kw] 0 76 N [CP] P [W] 0 N [CP] N n π n n N n. 6. Tensiuni în bare de secţiune axial-simetrică Se constată că dacă pe suprafaţa cilindrică a unei bare se traseaă generatoare şi cercuri paralele formând o reţea de pătrate curbilinii (fig. 6. a) după solicitarea barei la răsucire (fig. 6. b) pătratele devin romburi lungimea laturilor rămânând neschimbată. De asemenea secţiunile transversale rămân plane. Se deduce că un element de bară din vecinătatea suprafeţei laterale este solicitat numai de tensiuni tangenţiale altfel tensiunile normale ar fi produs alungirea laturilor. Se spune că elementul este solicitat la forfecare pură. Se fac următoarele ipotee: a) bara este dreaptă şi are secţiune constantă pe toată lungimea; b) momentul de torsiune este constant pe toată lungimea barei;
93 6. RĂSUCIRE BRELOR 9 barei; c) o secţiune transversală iniţial plană rămâne plană şi după răsucirea d) secţiunile sunt indeformabile şi se rotesc ca un rigid în jurul axei barei; ca urmare o linie radială (raă) trasată într-o secţiune transversală rămâne dreaptă în timpul răsucirii barei. a Fig. 6. b Geometria deformaţiei. Dacă dintr-o bară încastrată la un capăt solicitată la răsucire se decupeaă un element central de raă r şi lungime dx (fig. 6.) atunci în urma solicitării generatoarea CB ocupă poiţia CB' iar raa OB se deplaseaă în poiţia OB'. Unghiul BCB' γ este unghiul de lunecare specifică iar unghiul BOB' dϕ. Se constată că deplasarea punctului B în B' este atât γ dx cât şi r dϕ deci γ dx r dϕ. Variaţia unghiului de 90 o al generatoarei cu secţiunea din stânga este chiar unghiul de lunecare specifică unde dϕ γ r rθ (6.) d x dϕ θ (6.) dx se numeşte unghi de răsucire specifică. cesta este unghiul cu care se rotesc una faţă de cealaltă două secţiuni situate la o distanţă egală cu unitatea.
94 94 REZISTENŢ MTERILELOR Relaţia tensiuni-deformaţii specifice. plicând legea lui Hooke pentru forfecare (.) reultă τ G γ Gθ r. (6.) Tensiunile tangenţiale variaă liniar cu distanţa la centrul secţiunii. Ele sunt nule în centru şi au valori maxime la marginea secţiunii fiind perpendiculare pe raă (fig. 6.). Pe contur aceasta se deduce direct pe baa dualităţii tensiunilor tangenţiale (.). Fig. 6. Condiţiile de echilibru. Tensiunile τ produc forţe interioare care sunt în echilibru cu momentul de răsucire aplicat M t. Tensiunea τ care acţioneaă pe un element de suprafaţă d r dϕ dr dă o forţă tăietoare τ d care produce un moment reistent elementar faţă de centrul secţiunii r τ d. Momentul reistent total se obţine prin însumarea momentelor elementare care acţioneaă pe întreaga secţiune. Reultă unde M t r τ d Gθ r d G θ I p (6.4) I p r d este momentul de inerţie polar al secţiunii transversale. Reultă expresia unghiului de răsucire specifică p (6.5) Mt θ. (6.6) G I
95 6. RĂSUCIRE BRELOR 95 Înlocuind expresia (6.6) în relaţia (6.) se obţine formula tensiunilor tangenţiale la răsucirea barelor de secţiune axial-simetrică M t r τ (6.7) I p Tensiunea tangenţială maximă este Dacă se noteaă M t rmax τ max. (6.8) I max p I p W p (6.9) r modulul de reistenţă polar al secţiunii transversale atunci relaţia (6.8) devine Mt τ max. (6.8 a) W p Fig. 6. Relaţia (6.8 a) este utiliată sub următoarele trei forme: - formula de dimensionare: W p nec Mt ; (6.0 a) τ Mt - formula de verificare: τ ef τ a ; (6.0 b) W p a
96 96 REZISTENŢ MTERILELOR - formula momentului de răsucire capabil: Mt Wp τa. (6.0 c) În relaţiile (6.0) τ a este reistenţa admisibilă la răsucire. cap 6. Caracteristicile geometrice I p şi W p Secţiunea circulară plină În relaţia (6.5) se înlocuieşte d π r dr aria inelului circular de grosime dr (fig. 6.). Reultă momentul de inerţie polar unde D R este diametrul secţiunii. I p D 4 D π π r dr (6.) 0 Din relaţia (6.9) se obţine modulul de reistenţă polar W Secţiunea inelară circulară p 4 π D I p π D. (6.) r D max 6 Dacă bara are o gaură centrală de diametru d atunci momentul de inerţie polar este I p D 4 4 ( D ) π d π r dr. (6.) d Modulul de reistenţă polar al secţiunii inelare are expresia W p I r p max π 4 4 ( D d ) D π 4 4 ( D d ) 6 D Pentru un inel subţire de raă R şi grosime h se obţine π R h π R h. I p W p. (6.4)
97 6. RĂSUCIRE BRELOR 97 Exemplul 6. O bară din oţel cu reistenţa admisibilă τ a 50 N/mm este solicitată la răsucire de un moment Mt 750 Nm. Se cere să se dimensionee bara în două variante: a) de secţiune circulară plină cu diametrul δ ; b) de secţiune inelară cu diametrul interior d diametrul exterior D şi d 0 8 D. Să se compare ariile secţiunilor transversale în cele două cauri. Reolvare Pentru ambele variante din formula (6.0 a) se obţine modulul de reistenţă polar necesar Varianta. M t W p nec 5 0 mm. τ 50 a 0 δ 5 0 δ 4 mm Varianta. πδ mm ( 0 8 ) D 08 D d 0 D 0 D π D d D 50 mm d 40 mm 707 mm. 4 D Se observă că deci la lungimi egale greutatea barei de secţiune inelară este jumătate din greutatea barei de secţiune circulară plină pentru aceeaşi tensiune tangenţială maximă pe conturul secţiunii. ceasta se explică prin variaţia liniară a tensiunilor tangenţiale în lungul raei. Secţiunea inelară are aria distribuită mai avantajos pentru a prelua tensiunile mari din vecinătatea suprafeţei piesei. 6.4 Deformaţii la răsucire Din relaţiile (6.) şi (6.6) se obţine unghiul de răsucire pentru un element de bară de lungime dx: Mt dx d ϕ G I unde produsul G I p se numeşte modùl de rigiditate la răsucire. p
98 98 REZISTENŢ MTERILELOR Pentru o bară de lungime unghiul cu care se rotesc una faţă de cealaltă cele două secţiuni de la capete este M t dx ϕ. (6.5) G I 0 p Dacă bara are secţiune constantă şi momentul de răsucire este constant pe toată lungimea atunci M t ϕ. (6.6) G I este p Pentru un tronson de arbore de secţiune constantă rigiditatea la răsucire M G I t p k. (6.7) ϕ Există arbori la care se impune o valoare admisibilă θ a a unghiului de răsucire specifică. Din relaţia (6.6) reultă formula de dimensionare baată pe o condiţie de rigiditate Mt I p nec. (6.8) G θ Dacă se utilieaă relaţiile (6.0 a) şi (6.8) reultă două dimensiuni diferite dintre care se alege cea mai mare. a 6.5 Energia de deformaţie la răsucire Pentru un element de bară de lungime dx lucrul mecanic efectuat de momentul M t a cărui valoare creşte liniar cu rotirea d ϕ este M t dϕ. Lucrul mecanic total înmagainat de toată bara sub formă de energie potenţială de deformaţie este unde U 0 U M t Mt dx dϕ. (6.9) G I Pe baa relaţiilor (6.5) şi (6.7) notând dv d dx se mai obţine U V τ dv G τ este energia de deformaţie specifică la forfecare. G p (6.9 a)
99 6. RĂSUCIRE BRELOR Răsucirea barelor cu secţiune dreptunghiulară Studiul răsucirii barelor cu secţiune dreptunghiulară se face prin metodele Teoriei elasticităţii deoarece în acest ca ipotea secţiunii plane nu mai este valabilă. Secţiunile transversale ale barelor se deplaneaă (fig. 6.4 a). În figura 6.4 b se arată distribuţia tensiunilor tangenţiale pe o secţiune dreptunghiulară. a Fig. 6.4 b Tensiunea tangenţială maximă se produce la mijlocul laturii mari a dreptunghiului şi are valoarea La mijlocul laturii mici M t τ max τ B τ x max. (6.0) α h b τ xmax τ γ τ γ τ. C xmax Unghiul de răsucire specifică se calculeaă cu relaţia M t B θ. (6.) β h b G Valorile coeficienţilor α β şi γ sunt date în tabelul 6. pentru câteva valori ale raportului laturilor h b.
100 00 REZISTENŢ MTERILELOR Tabelul 6. h b α β γ În general pentru secţiuni pline oarecare se utilieaă relaţii generaliate de forma τ max M W t t şi M t θ (6.) G I unde W t este modulul de reistenţă la răsucire iar I t este momentul de inerţie la răsucire al secţiunii (nexa ). Relaţii pentru calculul acestor caracteristici geometrice se dau în manuale de specialitate. La secţiunea circulară W t şi I t sunt egale cu W p respectiv I p. În caul unei platbande subţiri raportul h b este foarte mare astfel că din relaţiile (6.0) şi (6.) se obţine t deci M t τ max G θ b h b M t θ (6.) h b G Wt h b şi It h b. (6.4) Răsucirea barelor poate fi studiată prin analogia cu membrana (Prandtl) sau prin analogia hidrodinamică (Greenhill). În primul ca se studiaă deformaţiile unei membrane aplicate peste un orificiu având forma secţiunii transversale a barei sub acţiunea unei presiuni uniform distribuite. Pe membrana bombată se traseaă curbele de nivel. Densitatea curbelor de nivel sau panta membranei într-un punct oarecare sunt proporţionale cu tensiunea tangenţială din bară în punctul respectiv. Tangenta la curba de nivel arată direcţia tensiunii tangenţiale. Volumul cuprins între planul conturului şi suprafaţa bombată a membranei este proporţional cu modulul de rigiditate la răsucire al secţiunii transversale a barei. În al doilea ca se studiaă liniile de curent ale curgerii unui lichid incompresibil printr-un vas având forma secţiunii barei solicitate la răsucire. Vitea fluidului într-un punct este proporţională cu tensiunea tangenţială în punctul respectiv al barei răsucite.
101 6. RĂSUCIRE BRELOR 0 Fig Răsucirea profilelor deschise cu pereţi subţiri Barele cu pereţi subţiri se mai numesc şi profile. La profilele cu secţiunea deschisă (fig. 6.5 a b c d) secţiunea transversală are un singur contur constituind un domeniu simplu conex. Unele profile laminate din oţel şi anumite profile din aluminiu sunt standardiate având denumiri consacrate: profil U (fig. 6.5 a) profil Z (fig. 6.5 b) cornier cu aripi neegale (fig. 6.5 c) şi profil I sau dublu-t (fig. 6.5 d). În general profilele deschise sunt formate din porţiuni dreptunghiulare colţurile fiind racordate la interior pentru diminuarea concentrării de tensiuni. La profilele închise din figurile 6.5 e f g secţiunea transversală constituie un domeniu dublu conex. În construcţiile aeronautice se utilieaă şi profile închise de mai multe ori deci multiplu conexe. Se arată atât experimental cât şi cu metodele Teoriei elasticităţii că dacă se îndoaie o platbandă subţire şi se realieaă bare solicitate la răsucire având profil deschis (fig. 6.6) valorile tensiunii tangenţiale maxime şi a unghiului de răsucire specifică nu se modifică. cestea se pot calcula cu relaţiile (6.) τ M t max G θ δ S δ M t θ (6. a) S δ G în care S este lungimea liniei mediane desfăşurate a profilului iar δ este grosimea. Pentru profilele deschise care pot fi descompuse în dreptunghiuri se poate considera că diferitele dreptunghiuri de dimensiuni δ i si acţioneaă independent şi preiau o parte din momentul de răsucire aplicat (fig. 6.7).
102 0 REZISTENŢ MTERILELOR Modulul de rigiditate la răsucire este G C G I t c i s δ (6.5) i i unde coeficientul c ţine cont de creşterea rigidităţii datorită racordărilor profilului. Se recomandă c la corniere c la profile U şi T şi c 5 la profile I. Fig. 6.6 Tensiunea tangenţială maximă în fiecare dreptunghi care compune secţiunea este τ max Gθ δ i (6.6) i Fig. 6.7
103 6. RĂSUCIRE BRELOR 0 unde unghiul de răsucire specifică este M t θ. (6.7) C Reultatele sunt valabile pentru bare în care momentul de răsucire este constant pe toată lungimea şi pentru caul răsucirii libere (deplanare neîmpiedicată). Exemplul 6. Să se calculee tensiunile tangeţiale maxime şi unghiul de răsucire specifică la profilul din aluminiu din figura 6.8 solicitat de un moment de răsucire de 0 Nm. Se cunoaşte G 7 GPa. Reolvare Se consideră că profilul U este compus din trei platbande subţiri cele două tălpi şi inima. Fie M t momentul de răsucire preluat de fiecare talpă şi M t momentul preluat de inimă. Din a doua relaţie (6. a) se obţine : 6 M t θ θ [Nmm] 6 M t θ θ [Nmm]. Fig. 6.8
104 04 REZISTENŢ MTERILELOR Înlocuind în condiţia de echilibru M t + M 0 0 t expresiile momentelor de răsucire din inimă şi tălpi se obţine 47 θ 0 0 deci unghiul de răsucire specifică este θ rad/mm 0 4 rad/m 4 / m. Din prima relaţie (6. a) reultă tensiunea tangenţială maximă în tălpi şi tensiunea tangenţială maximă în inimă τ max N/mm max τ 7 4 N/mm Răsucirea profilelor închise cu pereţi subţiri Studiul profilelor subţiri închise se face adoptând ipotea constanţei secţiunii transversale şi ipotea nedeformabilităţii secţiunii transversale deci considerând că deformaţia secţiunii transversale este o rotaţie de rigid iar proiecţia liniei mediane pe un plan perpendicular pe axa barei nu se modifică. Fig. 6.9 Se consideră un profil subţire închis de formă oarecare (fig. 6.9) având grosimea peretelui δ variabilă. Spre deosebire de secţiunile deschise momentul M t produce tensiuni tangenţiale uniform distribuite pe grosimea peretelui (ipotea lui Bredt).
105 6. RĂSUCIRE BRELOR 05 Se ioleaă un element infiniteimal din peretele profilului de lăţime dx paralelă cu axa barei şi de lungime arbitrară în lungul liniei mediane a profilului (desenată punctat). Fie δ grosimea în punctul şi δ grosimea în punctul. Tensiunile τ şi τ sunt constante pe grosimea peretelui. Conform dualităţii tensiunilor tangenţiale (.) pe feţele longitudinale din şi acţioneaă tensiuni egale cu tensiunile tangenţiale din planul secţiunii transversale perpendiculare pe muchia comună. Forţa tăietoare pe faţa în lungul axei barei este τ δ dx. Pentru echilibrul longitudinal al elementului iolat această forţă trebuie să fie egală cu forţa τ δ dx care acţioneaă pe faţa. Reultă τ δ τ δ şi deoarece punctele şi au fost alese arbitrar produsul τ δ este constant în lungul conturului. Mărimea q τ δ se numeşte flux de forfecare şi repreintă o forţă tăietoare pe unitatea de lungime a liniei mediane a secţiunii profilului subţire. Forţa df care acţioneaă tangenţial la contur pe un element de lungime ds este τ δ ds. Momentul acestei forţe faţă de axa barei (sau faţă de un punct din secţiune ales arbitrar) este τ δ r ds iar momentul total este Deoarece τ δ se mai scrie q M t M t τ δ r ds. este constant în lungul conturului momentul de răsucire τ δ r ds q r d s. Dar r d s este dublul suprafeţei haşurate şi r d s pentru tot conturul este Ω unde Ω este aria delimitată de linia mediană a peretelui profilului (desenată punctat). Reultă M t Ω q. (6.8) Tensiunile tangenţiale au valoarea (formula lui Bredt) M t τ. (6.9) Ω δ Pentru calculul unghiului de răsucire se egaleaă energia de deformaţie exprimată în funcţie de momentul de răsucire M t cu energia de deformaţie exprimată în funcţie de tensiunile tangenţiale τ (6.9 a). Energia înmagainată într-un element de dimensiuni ds dx δ este τ du δ dx ds. G
106 06 REZISTENŢ MTERILELOR Energia acumulată în tot profilul de lungime este U G τ δ ds τ δ G sau înlocuind tensiunile tangenţiale din relaţia (6.9) se obţine ds δ Mt ds U. (6.0) 8 Ω G δ Pe de altă parte energia de deformaţie este egală cu lucrul mecanic al cuplului elastic M pe rotirea ϕ t U M t ϕ. (6.) Egalând expresiile (6.0) şi (6.) ale energiei de deformaţie se obţine unghiul de răsucire specifică (formula lui Bredt) ϕ M t θ 4Ω G ds. (6.) δ Dacă profilul are grosimea δ constantă în lungul conturului atunci ϕ M t S τ S θ 4Ω G δ Ω (6.) G unde S este lungimea totală a liniei mediane a conturului închis. Exemplul 6. Să se compare tensiunile tangeţiale maxime şi rigidităţile la răsucire pentru un tub circular cu pereţi subţiri şi un tub cu aceleaşi dimensiuni în care s-a tăiat o fantă longitudinală pe toată lungimea (fig. 6.0) solicitate de momente de răsucire egale. Fig. 6.0 Reolvare La profilul închis din relaţiile (6.8a) şi (6.7) se obţine
107 6. RĂSUCIRE BRELOR 07 τ k M t R M t R M t I π R δ π R δ max p M G I t p G π δ. ϕ R La profilul deschis din relaţiile (6.) şi (6.4) se obţine τ k M M t s δ π R δ t max δ Mt G It G π R δ. ϕ Raportul tensiunilor tangenţiale maxime este τ τ max max R. δ Raportul rigidităţilor la răsucire este k R. k δ Dacă R δ 0 atunci tensiunile în tubul deschis sunt de 0 de ori mai mari decât cele din tubul închis în schimb rigiditatea tubului deschis este de 00 ori mai mică decât cea a tubului închis. În general la profilele deschise solicitate la răsucire tensiunile tangenţiale sunt mari şi deformabilitatea este mare. Reultă că profilele deschise cu pereţi subţiri nu sunt adecvate pentru a prelua solicitări de răsucire sau a împiedica deformaţiile produse de această solicitare. 6.9 Calculul arcurilor cilindrice elicoidale rcul cilindric elicoidal este o bară curbă în spaţiu. La un arc solicitat la întindere (fig. 6. a) dacă înclinarea spirelor este mare atunci forţa F redusă în centrul de greutate al secţiunii transversale produce toate cele patru solicitări simple: întindere forfecare încovoiere şi răsucire (fig. 6. b). La arcurile cu spire strânse la care înclinarea elicei este foarte mică forţa axială şi momentul încovoietor se pot neglija rămânând forţa tăietoare T F şi momentul de răsucire F R. M t
108 08 REZISTENŢ MTERILELOR La arcuri cu raa de înfăşurare mare în comparaţie cu diametrul spirei d << R efectul forfecării este neglijabil solicitarea principală fiind răsucirea. ( ) Fig. 6. Din formula de dimensionare la răsucire (6. a) în caul secţiunii circulare reultă: W p π d 6 M τ de unde se obţine diametrul spirei arcului a t F R τ a d F R. (6.4) 6 π τ a Numărul de spire n se calculeaă pe baa formulei săgeţii arcului. ceasta se poate deduce egalând lucrul mecanic produs de forţa F când arcul se deformeaă cu săgeata f cu energia de deformaţie la răsucire înmagainată de arc unde M t t p t M dx M F f G I G I F R π R n p I p 4 π d. Reultă săgeata arcului
109 6. RĂSUCIRE BRELOR 09 Relaţia (6.5) se mai scrie sub forma 64 F R n f. (6.5) 4 G d 4 G d F f k f 64 R (6.6) n unde k este rigiditatea arcului (denumită şi constanta elastică a arcului). Repreentarea grafică a relaţiei (6.6) se numeşte caracteristica elastică a arcului. Dacă se impune valoarea rigidităţii arcului F k f din relaţia (6.6) reultă numărul de spire necesar 4 G d n. (6.7) 64 R k La oţelurile de arcuri τ N/mm şi G 85 GPa. a 6.0 Sisteme static nedeterminate solicitate la răsucire La sisteme static nedeterminate reacţiunile şi eforturile din bare nu pot fi determinate numai cu ajutorul ecuaţiilor de echilibru din statică. Diferenţa între numărul reacţiunilor (sau eforturilor necunoscute) şi numărul ecuaţiilor de echilibru se numeşte grad de nedeterminare al sistemului. Pentru reolvarea problemelor static nedeterminate se utilieaă ecuaţii de echilibru ecuaţii de compatibilitate geometrică relaţii forţă-deformaţie şi condiţii la limită. Deobicei se elimină deformaţiile şi deplasările între ultimele trei tipuri de ecuaţii reultând un număr de condiţii de deformaţie exprimate în funcţie de eforturi sau reacţiuni egal cu gradul de nedeterminare Bara încastrată la capete Fie bara din figura 6. a încastrată la capete şi solicitată de momentul M. Se cunosc dimensiunile a b d şi modulul de elasticitate G. Se cer tensiunile tangenţiale maxime din bară. Reolvare
110 0 REZISTENŢ MTERILELOR Reacţiunile din încastrări sunt momentele M şi M. scrie Fig. 6. Ecuaţia de echilibru. Ecuaţia de proiecţii pe oriontală a momentelor se M M + M 0. (6.8) Compatibilitatea deformaţiilor. În urma aplicării cuplului M secţiunea se roteşte dar suma unghiurilor de răsucire ale celor două porţiuni - şi - este ero bara fiind încastrată la capete ϕ + ϕ 0. (6.9) Relaţiile forţă-deformaţie. Pe baa legii lui Hooke s-a stabilit expresia (6.6) a unghiurilor de răsucire care pentru cele două porţiuni de bară se scrie M a ϕ G I p M b ϕ. (6.40) G I Din diagrama momentelor de răsucire (fig. 6. b) reultă M M M M M M Din relaţiile (6.9)-(6.4) se obţin reacţiunile b M M p. (6.4) a M M (6.4) deci tensiunile tangenţiale maxime în cele două porţiuni de bară au expresiile
111 6. RĂSUCIRE BRELOR unde M M b M τ M a τ (6.4) W W p W p W p se calculeaă cu relaţia (6.). p W p 6.0. rbori concentrici Se cer tensiunile tangenţiale produse de momentul M t în arborele din figura 6. a compus din două tuburi subţiri din materiale diferite solidariate între ele. Se cunosc modulele de elasticitate transversale G şi G ale celor două materiale. a Fig. 6. b Reolvare Ecuaţia de echilibru. Cuplul exterior de cele două materiale. Suma momentelor de răsucire t momentul total: t t M t este preluat în proporţii diferite M şi t M t egaleaă M + M M. (6.44) Compatibilitatea deformaţiilor. Cele două materiale cu aceeaşi lungime iniţială au deformaţii la răsucire identice fiind solidariate între ele: θ θ. (6.45) Relaţiile forţă-deformaţie. Pe baa legii lui Hooke s-a stabilit expresia unghiurilor de răsucire specifică (6.6) care pentru cele două materiale se scrie
112 REZISTENŢ MTERILELOR Mt θ G I p Mt θ. (6.46) G I Înlocuind relaţiile (6.46) în (6.45) şi utiliând ecuaţia (6.44) se obţine G M t I p p p p Mt Mt. G I G I + G I Reultă tensiunile în cele două materiale la o distanţă r faţă de centru Mt r Mt r τ ; I G p I p + I p G Înlocuind r R în relaţiile (6.47) se obţine τ τ max min p Mt r Mt r τ. (6.47) I G p I p + I p G G G Se observă că în dreptul suprafeţei de contact tensiunile tangenţiale în cele două materiale sunt diferite raportul lor fiind egal cu raportul modulelor de elasticitate transversale. De acest fapt trebuie ţinut cont la solidariarea materialelor. Diagramele de variaţie a tensiunilor tangenţiale în lungul raei sunt date în figura 6. b. celaşi reultat s-ar obţine dacă cei doi arbori concentrici ar fi solidariaţi doar la capete.. 6. Concentrarea tensiunilor la răsucirea barelor Calculul la răsucire baat pe relaţia (6.8 a) este valabil numai pentru bare de secţiune constantă. Discontinuităţile geometrice de exemplu arbore în trepte găuri transversale degajări şanţuri de pană produc variaţii locale importante ale tensiunilor ale căror valori maxime sunt mai mari decât cele calculate în ipotea constanţei secţiunii transversale. La un concentrator de tensiuni tensiunea maximă este funcţie de forma şi dimensiunile piesei în vecinătatea discontinuităţii. La răsucire factorul de concentrare a tensiunilor elastice K t se defineşte prin relaţia τ max K t (6.48) τ nom
113 6. RĂSUCIRE BRELOR unde τ max este tensiunea maximă la discontinuitatea geometrică iar τ nom este valoarea obţinută neglijând efectul de concentrare a tensiunilor. Fig. 6.4 [4] Pentru o bară solicitată la răsucire cu secţiune variabilă în trepte variaţia factorului de concentrare a tensiunilor K t în funcţie de raportul între raa de racordare şi diametrul mic este redată în figura 6.4 pentru patru valori ale raportului diametrelor celor două porţiuni. Rae de racordare mici produc valori K mari deci trebuie evitate în proiectare. t Exemplul 6.4 Un arbore este antrenat cu o putere N 00 kw la o turaţie n 600 rot/min şi transmite puterile N 0 kw şi respectiv N 80 kw unor
114 4 REZISTENŢ MTERILELOR consumatori (fig. 6.5 a). Să se dimensionee arborele din oţel cu τ a 40 MPa şi G 8 GPa. Să se calculee rotirea relativă a secţiunii faţă de secţiunea 0 şi să se verifice unghiul de răsucire specifică ştiind că valoarea admisibilă este θa 008 rad/m. Se dau a 05 m şi b 00 m. Fig. 6.5 Reolvare Se traseaă diagrama puterilor (fig. 6.5 b) şi se calculeaă momentele de răsucire pe intervalele 0- şi - : N0 00 M t Nm n 600 N 80 M 9550 t Nm. n 600 Se poate trasa şi diagrama momentelor de răsucire (fig. 6.5 c). Din relaţiile (6.0a) şi (6.) reultă diametrele arborelui : 6 M t d 0 74 mm π τ π 40 a
115 6. RĂSUCIRE BRELOR 5 d 6 M mm. π 40 t 0 0 π τa Se aleg valorile d 75 mm şi d 55 mm. Unghiul rotirii secţiunii faţă de secţiunea 0 are expresia M t 0 0 M t ϕ 0 + G I G I p p unde : I p 4 π mm 4 I p 4 π mm 4. Reultă ϕ rad Unghiurile de răsucire specifică pe cele două intervale calculate cu relaţia (6.6) sunt θ 0 M t rad/mm < θ 8 0 rad/mm 4 4 a G I p M θ < θ t rad/mm a. 4 4 G I p Exemplul 6.5 Să se determine momentul de răsucire capabil pentru bara din figura 6.6 precum şi rotirea secţiunii faţă de încastrare. Bara este din oţel cu τ a 60 MPa şi G 8 GPa d 0 mm b 0 mm h 5 mm a 0 m b 0 m. Reolvare Pentru secţiunea circulară π d π 0 Wd Wp 57 0 mm 6 6 iar pentru secţiunea dreptunghiulară ( α 0 şi β 096 pentru h/b 5) W d α h b mm. Reultă momentul de răsucire capabil (6.0c)
116 6 REZISTENŢ MTERILELOR Mt W τ a Nmm 079 Nm. cap d min Fig. 6.6 Unghiul de rotire al secţiunii faţă de încastrarea are expresia : M t Mt ϕ + G I G I p d unde I p 4 π d π mm 4 I d β h b mm. 4 4 Reultă ϕ rad Exemplul 6.6 Să se dimensionee bara încastrată la capete din figura 6.7 a din oţel cu secţiune circulară cu τ a 50 MPa. Reolvare Ecuaţia de echilibru a momentelor se scrie M + M 50. Sistemul este simplu static nedeterminat. Problema se va reolva prin suprapunerea efectelor pe baa reultatelor de la paragraful 6.0..
117 6. RĂSUCIRE BRELOR 7 Dacă acţioneaă numai momentul din secţiunea condiţia de deformaţie M M ϕ ϕ se scrie sau M M. Dar ecuaţia de G I G p I p echilibru este M + M 50 deci M 7 5 Nm M 5 Nm valori cu care se construieşte diagrama momentelor de răsucire din figura 6.7 b. Fig. 6.7 Similar dacă acţioneaă numai momentul din secţiunea 4 condiţia de deformaţie ϕ4 ϕ 4 sau M M şi ecuaţia de echilibru M + M 00 conduc la M 5 Nm M 75 Nm ; Diagrama corespunătoare a momentelor de răsucire este redată în figura 6.7 c. În caul acţiunii simultane a celor două momente diagrama momentelor de răsucire are forma din figura 6.7 d. Reultă M max t 875 Nm. Se utilieaă formula de dimensionare (6.0 a) W p nec M t max τ a mm
118 8 REZISTENŢ MTERILELOR π d deci de unde reultă 07 mm d. Se alege d mm. Exemplul 6.7 Un arc cilindric elicoidal având raa de înfăşurare R 40 mm şi numărul de spire n 8 este comprimat de o forţă F 50 N. Să se dimensionee arcul şi să se calculee săgeata f cunoscând τ a 500 MPa şi G 85 GPa. Reolvare Se dimensioneaă arcul cu formula (6.4) d 6 F R π τ Se alege d 8 mm. Săgeata arcului are expresia (6.5) π 500 a mm 64 F R n f 7 6 mm G d
119 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE La încovoiere şi răsucire forma secţiunii barei este uneori mai importantă decât suprafaţa acesteia. Caracteristicile geometrice ale secţiunilor plane independente de deplanare care intervin în calculul tensiunilor şi deformaţiilor sunt momentele de inerţie momentele centrifugale şi modulele de reistenţă calculate faţă de axe care trec prin centrul de greutate al suprafeţei secţiunii transversale. Este evident că noţiunile provin din mecanică prin particulariarea relaţiilor de la plăci subţiri. O suprafaţă plană nu are greutate nu are inerţie şi nici proprietăţi centrifugale. Momentele de inerţie se mai numesc momente de ordinul doi ale suprafeţelor momentele centrifugale se mai numesc produse ale suprafeţelor iar centrele de greutate se numesc centre geometrice sau centroide. Se vor utilia denumirile "improprii" aşa cum sunt definite în standardul românesc privind terminologia din Reistenţa materialelor (STS 96-8). Pentru simplificarea expunerii sistemul de axe O va fi rotit 80 o faţă de convenţia din acest curs. xa O va fi orientată în sus iar axa O spre dreapta. 7. Momente statice ale suprafeţelor plane Fie suprafaţa plană din figura 7.. Momentul (de ordinul întâi al) elementului de suprafaţă d faţă de axa O este d deci momentul static al întregii suprafeţe faţă de axa O este d unde este aria suprafeţei: S d. (7.) Momentul static al întregii figuri faţă de axa O este S d. (7.)
120 0 REZISTENŢ MTERILELOR Se alege un nou sistem de coordonate G obţinut prin translaţia axelor sistemului O. Coordonatele elementului d în noul sistem de axe sunt G G. unde sunt coordonatele punctului G în sistemul iniţial. G G Fig. 7. Originea G a noului sistem se alege astfel încât în sistemul de coordonate G momentele statice ale suprafeţei să fie nule: S S d ( - G ) d 0 (7.) d ( - ) d 0. Reultă coordonatele centrului de greutate al suprafeţei G S d G G S d. (7.4) În practică o suprafaţă este adesea împărţită în mai multe figuri cu forme geometrice simple (de ex. dreptunghiuri cercuri triunghiuri) ale căror suprafeţe şi centre de greutate sunt cunoscute sau uşor de determinat. Coordonatele centrului de greutate al suprafeţei compuse se calculeaă cu relaţiile i i G i i i G (7.5) unde i şi i sunt coordonatele centrului de greutate al suprafeţei i i ( i..n).
121 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE Dacă o figură are o axă de simetrie atunci centrul de greutate se află pe această axă deoarece momentul static faţă de o axă de simetrie este ero. Dacă figura are două axe de simetrie atunci centrul de greutate se află la intersecţia acestora. Dacă o figură nu are axe de simetrie dar are un centru de simetrie atunci centrul de greutate coincide cu centrul de simetrie. Orice axă care trece prin centrul de greutate al suprafeţei se numeşte axă centrală. 7. Momente de inerţie ale suprafeţelor plane Prin definiţie momentele de inerţie axiale sunt momente de ordinul doi ale suprafeţelor I d I d. (7.6) Momentul centrifugal al suprafeţei faţă de axele O este I d. (7.7) Dacă una dintre axe este axă de simetrie atunci momentul centrifugal al suprafeţei este nul. este La suprafeţe axial-simetrice momentul de inerţie polar faţă de punctul O ( + ) d I I I p r d + unde r este distanţa de la elementul d la originea O.. (7.8) Momentele de inerţie axiale şi cel polar sunt mărimi poitive în timp ce momentul centrifugal poate fi poitiv ero sau negativ. Raele de inerţie se definesc prin relaţiile I i I i. (7.9) Dreptunghiul La dreptunghiul cu baa b şi înălţimea h din figura 7. se consideră elementul de arie d b d situat la distanţa de axa O. Prima integrală (7.6) devine
122 REZISTENŢ MTERILELOR Deci + h b h I d b d. (7.0) h b h I şi h b I. (7.) Cercul Fie cercul de raă R D din figura 7.. Elementul de suprafaţă haşurat d r dθ dr este situat la distanţa r sinθ de axa O. Reultă Deci I R d ( r sinθ ) r dθ dr π 0 0 π R 4 4. I 4 π D I. (7.) 64 ceeaşi expresie se poate deduce din formula momentului de inerţie polar (6.7) pe baa relaţiei (7.8) I I I. p Fig. 7. Fig. 7. Inelul circular La un inel gros cu diametrul exterior D şi diametrul interior d momentul de inerţie axial se obţine scăând momentul de inerţie al cercului interior din momentul de inerţie al cercului exterior 4 4 π ( D d ) I I. (7.) 64
123 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE La un inel subţire de raă R şi grosime δ << R se consideră un element de suprafaţă d R dθ δ situat la distanţa R sinθ de axa O. Reultă I d ( R sinθ ) R dθ δ π R δ. (7.4) π 0 ( ) Triunghiul Fie triunghiul din figura 7.4 a definit prin coordonatele vârfurilor i faţă de un sistem de axe oarecare O. i i a Fig. 7.4 b S Coordonatele centrului de greutate sunt G + ( + ) G ( + + ). (7.5) Momentele statice faţă de sistemul de coordonate O au expresiile ( + ) S ( + ) G + unde este suprafaţa triunghiului (7.6) G + [ ( ) + ( ) + ( ) ]. (7.7) Momentele de inerţie axiale sunt I [ ( + ) + ( + ) + ( + ) ] (7.8) 6
124 4 REZISTENŢ MTERILELOR I [ ( + ) + ( + ) + ( + )]. (7.9) 6 Momentul centrifugal este I + [( + )( + ) + ( + )( + ) + ( + )( )] (7.0) Calculul relaţiilor de mai sus se poate face simplu utiliând coordonatele triunghiulare (fig. 7.4 b). Poiţia unui punct P în interiorul sau pe conturul unui triunghi de suprafaţă este determinată de trei rapoarte între suprafeţe numite coordonate triunghiulare L L L. (7.) Între coordonatele carteiene ale punctului P şi coordonatele triunghiulare L L L se stabilesc relaţiile liniare L L. (7.) L Înlocuind coordonatele în relaţiile de definiţie (7.6) şi (7.7) se obţin formulele (7.8)-(7.0). Se utilieaă integrale de forma (Gallagher) ( L ) ( L ) a b ()() a! b! d ( a + b + )! L a ( ) () a! d. ( a + )! Momentele de inerţie ale triunghiului faţă de axele centrale sunt ( + ) I ( + + ) I + I + (7.) ( + ). (7.4) Relaţiile (7.5)-(7.0) sunt utile la calculul momentelor de inerţie ale suprafeţelor de forme complicate care pot fi aproximate prin mai multe triunghiuri de exemplu secţiunea transversală a unui burghiu sau a unei palete de turbină sau compresor. Triunghiul dreptunghic Fie triunghiul dreptunghic cu baa b şi înălţimea h din figura 7.5. Din relaţiile (7.8)-(7.0) se obţine b h I h b I b h I. 4
125 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE 5 Din relaţiile (7.) şi (7.4) se obţine b h I 6 h b I 6 I h b. 7 Semnul momentului centrifugal faţă de axele centrale depinde de sensul acestora în raport cu triunghiul putând fi poitiv pentru alte direcţii ale axelor faţă de cele din figura 7.5. Fig. 7.5 Fig. 7.6 Fâşie dreptunghiulară subţire Pentru calculul momentelor de inerţie ale profilelor subţiri acestea se decompun în suprafeţe dreptunghiulare înguste. În continuare se calculeaă momentele de inerţie la un dreptunghi a cărui grosime este mult mai mică decât lungimea. Fie dreptunghiul din figura 7.6 definit prin grosimea δ şi coordonatele extremităţilor i i ( i ) faţă de un sistem de axe oarecare O. Se noteaă lungimea dreptunghiului şi α înclinarea acestuia faţă de axa O. Elementul de lungime d are suprafaţa Se calculeaă I d d δ d δ. sinα δ d sinα deci momentul de inerţie faţă de axa O este δ d sinα δ
126 6 REZISTENŢ MTERILELOR ( + ) I + (7.5) şi analog momentul de inerţie faţă de axa O este ( + ) I +. (7.6) Din relaţia (7.7) se obţine momentul centrifugal I [( + )( + ) + + ] (7.7) 6 7. Variaţia momentelor de inerţie cu translaţia axelor La calculul momentelor de inerţie ale suprafeţelor compuse se cunoaşte momentul de inerţie al unei suprafeţe componente faţă de un sistem de axe local cu originea în centrul de greutate al suprafeţei respective şi se calculeaă momentul de inerţie faţă de un sistem de axe global având axele paralele cu axele sistemului local. Fig. 7.7 Cu notaţiile din figura 7.7 se obţine I ( + b) d ( + b + b ) d I b d + I I ( + a) d ( + a + a ) d I a d + ( + a)( + b) d ( + a + b + ab) d I ab d. +
127 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE 7 Reultă relaţiile cunoscute ca formulele lui Steiner sau teorema axelor paralele: I I b + I I a (7.8) + Momentul de inerţie faţă de o axă oarecare este egal cu momentul de inerţie faţă de o axă paralelă care trece prin centrul de greutate al suprafeţei plus produsul ariei suprafeţei cu pătratul distanţei între cele două axe. I I a b. (7.9) + Momentul de inerţie centrifugal faţă de două axe oarecare este egal cu momentul de inerţie centrifugal faţă de axe paralele care trec prin centrul de greutate al suprafeţei plus produsul ariei cu distanţele între cele două axe. Relaţiile (7.8) şi (7.9) pot fi utiliate cu condiţia ca cel puţin una dintre axe să fie axă centrală. Exemplul 7. Se cere să se calculee momentele de inerţie axiale ale suprafeţei din figura 7.8 a în care dimensiunile sunt date în mm. Fig. 7.8 Figura se împarte în două dreptunghiuri de arii şi la care se cunosc centrele de greutate. Se alege un sistem de axe de referinţă cu axa la baa figurii şi axa axa de simetrie verticală. Se calculeaă poiţia centrului de greutate obţine I G 50 mm Se traseaă axa 60 0 G paralelă cu O. plicând prima formulă (7.8) se mm 4
128 8 REZISTENŢ MTERILELOR I I mm. Momentul de inerţie axial I al suprafeţei în U din figura 7.8 b are aceeaşi valoare cu cel al suprafeţei în T din figura 7.8 a. 7.4 Variaţia momentelor de inerţie cu rotaţia axelor Momentele de inerţie ale unei suprafeţe plane nu depind numai de alegerea originii axelor de coordonate dar şi de orientarea axelor în planul suprafeţei. La studiul încovoierii oblice a barelor este uneori necesar să se calculee momentele de inerţie faţă de un sistem de axe de coordonate rotit faţă de sistemul considerat iniţial. Fie suprafaţa din figura 7.9 la care se cunosc momentele de inerţie faţă de axele O notate I I I. Intereseaă valorile momentelor de inerţie faţă de un sistem de axe O rotit cu unghiul θ faţă de axele iniţiale momente notate I I I. Fig. 7.9 Coordonatele elementului d în sistemul de axe rotit se pot exprima în funcţie de coordonatele elementului în sistemul de axe iniţial: cosθ + sinθ cosθ sinθ. (7.0)
129 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE 9 I Momentele de inerţie faţă de axele rotite sunt cos θ I d cos θ + I ( cosθ sinθ ) d + sin θ sin θ I d d sinθ cosθ sinθ cosθ d I I d ( cosθ + sinθ ) d (7.) I cos θ + I sin θ + I sinθ cosθ d ( I - I ) sinθ cosθ + I ( cos θ sin θ ). ( cosθ + sinθ )( cosθ sinθ ) d Relaţiile (7.) se scriu convenabil în funcţie de unghiul dublu: I I + I I I + cos θ I sin θ (7.) I + I I I I cos θ + I sin θ (7.) I I I sin θ cos θ. + I (7.4) Unghiul θ pentru care momentul de inerţie axial I dat de relaţia di d θ 0. Reultă (7.) are o valoare extremă se obţine din condiţia ( ) ( I )( sin θ ) I cos θ 0 I (7.5) deci unghiul care anuleaă derivata este dat de relaţia I tg θ (7.6) I I unde pentru simplificarea expunerii nu s-a schimbat notaţia pentru unghiuri. Ecuaţia (7.6) are două soluţii care diferă cu 80 o. Deci există două unghiuri θ care diferă cu 90 o şi care definesc direcţiile axelor care trec prin punctul O şi faţă de care momentul de inerţie axial are valori extreme. cestea se numesc direcţii principale de inerţie. Dacă originea axelor este în centrul de greutate al suprafeţei atunci acestea se numesc axe centrale principale de inerţie. Comparând relaţiile (7.4) şi (7.5) se observă că unghiul θ din relaţia (7.6) corespunde rotaţiei axelor pentru care momentul centrifugal se anuleaă.
130 0 REZISTENŢ MTERILELOR Deci axele principale de inerţie se pot defini şi ca axele faţă de care momentele centrifugale sunt nule. Înlocuind unghiurile θ din relaţia (7.6) în expresia (7.) a momentului de inerţie axial I se obţin momentele de inerţie I şi I faţă de axele principale de inerţie numite momente de inerţie principale I + I I I ± I I +. (7.7) Este posibil să se stabilească expresii care sunt invariante faţă de rotirea axelor de coordonate I I I I + I I + + I (7.8) I I I I I I I. (7.9) De asemenea uneori este util să se exprime momentele de inerţie calculate faţă de axe oarecare în funcţie de momentele de inerţie principale θ I I cos θ + I sin (7.40) θ I I sin θ + I cos (7.4) I I I sin θ. (7.4) Dacă I 0 şi I I atunci I I I I şi orice axă este o axă principală de inerţie. cesta este caul suprafeţelor axial-simetrice şi al celor închise de poligoane regulate. Exemplul 7. Se cere să se calculee momentele de inerţie faţă de axele centrale principale ale suprafeţei din figura 7.0 în care dimensiunile sunt date în mm. Reolvare Figura se împarte în două dreptunghiuri de arii şi la care se cunosc centrele de greutate G şi G. Se alege un sistem de axe de referinţă cu axa O la marginea de sus a figurii şi axa O la marginea din stânga. Se calculeaă poiţia centrului de greutate G 9 87 mm
131 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE G ( 5) ( 5) mm Se deseneaă axa G paralelă cu O şi axa formulele (7.8) se obţin momentele de inerţie axiale I I G paralelă cu O. plicând ( ) ( ) mm ( ) ( ) mm Din formula (7.9) se determină momentul centrifugal 4 ( 7 7) ( 6) mm I.. Fig. 7.0 Din relaţia (7.7) se calculeaă momentele de inerţie principale ( ) ( 8 5 ± 8 4) 4 I 0 ± 0 sau 4 4 I mm şi I 59 0 mm. 4 4
132 REZISTENŢ MTERILELOR Din relaţia (7.6) se obţine tg θ deci θ 4754 o şi 46 o. Reultă unghiurile care definesc direcţiile principale de inerţie θ 77 o şi θ 66 o. În figura 7.0 s-au trasat axele centrale principale notate respectiv. Se vede că elementele suprafeţei sunt cel mai îndepărtate faţă de axa şi cel mai apropiate faţă de axa. Exemplul 7. Se cere să se calculee momentele de inerţie faţă de axele centrale principale la secţiunea din figura 7.. Fig. 7. Reolvare Suprafaţa secţiunii: 400 mm. Coordonatele centrului de greutate: G 57 mm G Momentele de inerţie faţă de sistemul O sunt 64 mm. 4 mm 4 I mm 4 I mm 4 I 8 0. Momentele de inerţie faţă de axele centrale G sunt 4 mm 4 I mm 4 I I mm 4. Direcţiile axelor centrale principale sunt definite de unghiurile θ 59 o θ 059 o.
133 7. PROPRIETĂŢI LE SUPRFEŢELOR PLNE Momentele de inerţie centrale principale au valorile I 70 0 mm I 75 0 mm. Fig. 7. Fig. 7. Exemplul 7.4 Să se determine poiţia centrului de greutate şi momentele de inerţie faţă de axele sistemului de referinţă O pentru suprafaţa sfert de cerc din figura 7.. Reolvare Momentul static faţă de axa O (7.) este S π R d r sin dr rdθ r dr sinθ dθ 0 0 Coordonatele centrului de greutate (7.4) sunt S R 4R G πr 4 π Momentul de inerţie faţă de axa O (7.6) este I π R R R θ. G. d r sin dr rdθ r dr sin θ dθ 0 0 Momentul centrifugal (7.7) este 0 R π 0 π R θ. 6 0 π 0 4 I π R d r cos r sinθ dr rdθ r dr sinθ cosθ dθ 0 0 R R θ. 8 0 π 0 4
134 4 REZISTENŢ MTERILELOR Exemplul 7.5 Secţiunea transversală a unui burghiu are forma aproximativă din figura 7.. Se cere să se calculee momentele de inerţie centrale principale şi poiţia axelor centrale principale de inerţie. Reolvare Se consideră că jumătatea inferioară a secţiunii se compune din dreptunghiul şi sfertul de cerc din care se decupeaă semicercul. Momentele de inerţie axiale se calculeaă pe baa expresiilor stabilite pentru dreptunghi (7.) cerc (7.) şi sfert de cerc (Exemplul 7.4) utiliând formulele lui Steiner (7.8). Se obţine a a a π 4 π 4 π a 4 I + aa + ( a) a ( a) a 6 8 ( a) a a π 4 π 4 4 I + aa + ( a) a 49 0 a. 6 8 Momentul centrifugal este I a a π a 4a a a 8 π 4 4 ( a) + a 08 Momentele de inerţie principale (7.7) sunt I + I I I I ± + I de unde reultă ± + ( 08). 4 I 54 a 4 I 5 7 a. Direcţiile principale de inerţie (7.6) se obţin din relaţia ( 08) I tg θ I I θ şi θ 4. 0
135 8. ÎNCOVOIERE BRELOR O bară este solicitată la încovoiere dacă în secţiunea transversală acţioneaă un moment al cărui vector este perpendicular pe axa barei. Deobicei încovoierea este reultatul acţiunii unor sarcini transversale asupra unor bare relativ velte cum sunt grinile de susţinere a planşeelor grinile podurilor osiile vagoanelor paletele turbinelor şi compresoarelor axiale arcurile în foi şi chiar aripile unor avioane. ceste sarcini produc în secţiunea transversală atât moment încovoietor cât şi forţă tăietoare. Momentele încovoietoare produc tensiuni normale distribuite liniar pe înălţimea secţiunii barei reultat direct al ipoteei secţiunii plane. În aceste condiţii forma secţiunii barei este mai importantă decât aria suprafeţei forme optime fiind obţinute cu ajutorul profilelor subţiri. Forţele tăietoare produc tensiuni tangenţiale nule la extremităţi şi maxime la centrul secţiunii. Calculul acestora este important la profilele subţiri şi la organele de asamblare ale grinilor compuse. Dacă acţioneaă numai un moment încovoietor se spune că bara este solicitată la încovoiere pură. Dacă forţele care acţioneaă asupra barei sunt cuprinse într-un plan de simetrie al secţiunii transversale atunci bara este solicitată la încovoiere simetrică. Dacă vectorul moment este dirijat în lungul unei axe centrale de inerţie a secţiunii care însă nu este şi axă principală atunci se spune că bara este solicitată la încovoiere oblică. În multe cauri încovoierea apare simultan cu răsucirea. În acest capitol se studiaă numai încovoierea. 8. Tensiuni la încovoierea pură simetrică Determinarea distribuţiei tensiunilor la încovoierea pură este o problemă static nedeterminată la reolvarea căreia se utilieaă condiţii de deformaţie relaţii între tensiuni şi deformaţii specifice şi condiţii de echilibru. Se fac următoarele ipotee: a) barele au secţiune constantă; b) momentul încovoietor este constant în lungul barei având vectorul dirijat perpendicular pe un plan de simetrie al barei; c) secţiunile transversale plane înainte de încovoierea
136 6 REZISTENŢ MTERILELOR barei rămân plane după încovoiere şi perpendiculare pe axa deformată a barei; d) raa de curbură a barei deformate este mare în comparaţie cu dimensiunile transversale; e) elemente longitudinale ale barei sunt solicitate doar la întindere sau compresiune nu există tensiuni transversale; f) modulul de elasticitate longitudinal al materialului barei are aceeaşi valoare la întindere şi la compresiune. 8.. Deplasări şi deformaţii specifice Deformaţii longitudinale Se consideră o porţiune de lungime dx dintr-o bară solicitată la încovoiere pură în planul xo (fig. 8. a). În urma aplicării momentelor încovoietoare M bara se deformeaă ca în figura 8. b cele două secţiuni situate iniţial la distanţa dx rotindu-se relativ cu unghiul d ϕ dar rămânând plane conform ipoteei lui Bernoulli. Se observă că partea de jos a barei este întinsă în timp ce partea superioară este comprimată. Înseamnă că trebuie să existe un plan intermediar xo în care deformaţia longitudinală este ero. cesta se numeşte plan neutru iar axa Ox din acest plan se numeşte axa neutră a barei. Fig. 8. Dacă bara ar fi formată din fibre longitudinale atunci s-ar observa că în urma încovoierii barei fibrele inferioare se întind iar cele superioare se comprimă.
137 8. ÎNCOVOIERE BRELOR 7 Fibra care nu se alungeşte prin deformaţia de încovoiere este numeşte fibra medie a barei. Fie ρ raa de curbură a fibrei medii. O fibră situată la distanţa de fibra medie are iniţial lungimea iar după aplicarea solicitării devine mn dx a b ρ dϕ ( ρ ) dϕ m n +. lungirea acestei fibre este ( dx ) l n m n m l m n a b dϕ. a b ab şi se lungirea specifică se obţine împărţind alungirea la lungimea iniţială ( dx) dϕ dϕ ε x dx ρ dϕ dx Dacă se noteaă curbura fibrei medii deformate relaţia (8.) se mai scrie unde ρ. (8.) dϕ κ (8.) ρ dx dux dϕ ε x κ. (8.) dx dx u x ϕ (8.4) este deplasarea longitudinală a unui punct situat la distanţa de planul neutru. Ca o consecinţă directă a ipoteei secţiunii plane alungirile specifice sunt distribuite liniar pe înălţimea secţiunii fiind nule în planul neutru şi având valori maxime în fibrele extreme. Relaţia (8.) este independentă de tipul materialului barei fiind valabilă şi la materiale cu dependenţă neliniară între tensiuni şi deformaţii specifice sau la solicitări în domeniul plastic. Deformaţii transversale. Studiul încovoierii se baeaă şi pe ipotea invariabilităţii secţiunii transversale a barei. În realitate alungirile în lungul barei sunt însoţite de contracţii transversale ε ε ν ε (4.9). În ona întinsă grosimea barei scade în ona x comprimată grosimea barei creşte iar suprafaţa neutră se curbeaă fenomen denumit curbură anticlastică. ceste deformaţii sunt foarte mici şi nu modifică reultatele obţinute pentru alungirile specifice longitudinale.
138 8 REZISTENŢ MTERILELOR 8.. Relaţia între tensiuni şi deformaţii specifice plicând legea lui Hooke (.) reultă E σ x E ε x κ E (8.5) ρ relaţie valabilă numai pentru materiale liniar-elastice. Tensiunile normale de încovoiere variaă liniar cu distanţa la fibra medie (fig. 8. c) fiind maxime în fibrele extreme unde distanţa este maximă. În planul neutru deci pentru o secţiune dată în lungul axei neutre tensiunile produse de încovoiere sunt nule. De asemenea conform ipoteelor de lucru σ σ 0. Fig. 8. Fig Condiţii de echilibru Tensiunile σ x produc forţe interioare σ x d care echilibreaă momentul încovoietor M. Dacă se scriu relaţiile de echivalenţă (.4) între tensiunile σ x şi eforturile secţionale (fig. 8.) se obţine N σ d 0 (8.6) x M i σ x d M (8.7) M σ d 0. (8.8) i x În relaţiile (8.6)-(8.8) s-a ţinut cont de faptul că fiind paralele cu axa Ox forţele σ x d pot produce în general forţă axială şi momente încovoietoare dar dintre acestea există numai momentul dirijat în lungul axei O.
139 8. ÎNCOVOIERE BRELOR 9 Poiţia axei neutre O. Înlocuind relaţia (8.5) în (8.6) se obţine κ E d 0 sau d 0. Momentul static al suprafeţei secţiunii transversale (7.) faţă de axa O este nul deci axa O trebuie să fie axă centrală. Reultă că axa neutră O trece prin centrul de greutate al secţiunii transversale a barei. xa O Înlocuind relaţia (8.5) în (8.8) se obţine κ E d 0 sau d 0. Reultă că momentul centrifugal al suprafeţei secţiunii transversale trebuie să fie nul I 0 deci axele sistemului O trebuie să fie axe centrale principale. În caul încovoierii simetrice această condiţie este automat îndeplinită. Când secţiunea barei nu este simetrică planul forţelor trebuie să conţină o axă centrală principală (fig. 8.) Formula lui Navier M Înlocuind relaţia (8.5) în (8.7) se obţine κ E d sau κ E I M. Reultă curbura barei dϕ M κ ρ dx. (8.9) EI Din relaţia (8.5) reultă formula tensiunilor normale la încovoiere simetrică M σ x (8.0) I cunoscută ca formula lui Navier. Tensiunile de încovoiere sunt proporţionale cu momentul încovoietor şi cu distanţa la axa neutră şi invers proporţionale cu momentul de inerţie axial al secţiunii transversale. La o secţiune cu două axe de simetrie (fig. 8.4 a) tensiunile au valori maxime egale (şi de semn contrar) în fibrele extreme. La o secţiune cu o singură
140 40 REZISTENŢ MTERILELOR axă de simetrie (fig. 8.4 b) tensiunea maximă σ max apare în fibra cea mai îndepărtată de axa neutră. ceastă valoare nu trebuie să depăşească reistenţa admisibilă la încovoiere pentru materialul barei. a Fig. 8.4 b Dacă materialul are reistenţa admisibilă la întindere diferită de cea la compresiune este importantă orientarea secţiunii astfel încât tensiunea maximă să apară pe partea cu reistenţa admisibilă mai mare. unde 8..5 Modulul de reistenţă axial Tensiunea normală maximă are expresia σ max M max M M I I W (8.) max max I W (8.) este modulul de reistenţă axial sau modulul de reistenţă la încovoiere al secţiunii transversale. La secţiunea circulară plină cu diametrul D se obţine 4 π D I 64 π D W. (8. a) D D
 La secţiunea dreptunghiulară cu baa b şi înălţimea h se calculeaă W b h I b h. (8. c) h h 6 Relaţia (8.) este utiliată sub următoarele forme: M - formula de dimensionare la încovoiere: W ; (8.")
141 8. ÎNCOVOIERE BRELOR 4 reultă La secţiunea inelară circulară cu diametrul exterior D şi cel interior d W π I D 4 4 ( D d ) 64 D π 4 4 ( D d ) D. (8. b) La secţiunea dreptunghiulară cu baa b şi înălţimea h se calculeaă W b h I b h. (8. c) h h 6 Relaţia (8.) este utiliată sub următoarele forme: M - formula de dimensionare la încovoiere: W ; (8.4 a) nec σ a M - formula de verificare: σ ef σ a; (8.4 b) W - formula momentului încovoietor capabil: Mcap W σ a. (8.4 c) În relaţiile (8.4) σ a este reistenţa admisibilă la încovoiere iar M este momentul încovoietor maxim din bară în valoare absolută. Pentru configuraţii sau încărcări mai complicate acesta se obţine din diagrama momentelor încovoietoare. Fig. 8.5 Fig. 8.6 O grindă reistă cu atât mai bine la încovoiere cu cât W are valori mai mari. Forma secţiunii transversale este cu atât mai raţională cu cât W este mai mare pentru un consum de material cât mai mic deci pentru o valoare cât mai mică a ariei a suprafeţei secţiunii transversale.
142 4 REZISTENŢ MTERILELOR În figura 8.5 se arată trei secţiuni cu arii egale ( pătrate cu latura a) la care prin distribuirea judicioasă a elementelor suprafeţei (cât mai departe de axa O) se obţine un modul de reistenţă tot mai mare. stfel W 8 a (fig. 8.5 a); W a 5 W (fig. 8.5 b); W a W (fig. 8.5 c). La secţiunea în I tălpile preiau cea mai mare parte a solicitării de încovoiere inima având rolul de a menţine tălpile în poiţie şi de a prelua solicitările de forfecare care apar la încovoierea cu forţă tăietoare. Se apreciaă că la profilele utiliate în construcţii metalice tălpile preiau până la 80% din momentul încovoietor din secţiune. La unele bare pentru micşorarea greutăţii se prevăd găuri transversale din loc în loc în lungul fibrei medii deci în ona unde tensiunile normale sunt foarte mici. În figura 8.6 se arată două secţiuni cu acelaşi modul de reistenţă W. Secţiunea inelară (fig. 8.6 b) cu suprafaţa mai judicios distribuită (tensiunile de încovoiere cresc liniar de la centru spre suprafaţa barei) are aria egală cu 055 din aria suprafeţei secţiunii circulare pline (fig. 8.6 a). În acelaşi scop în construcţii metalice se utilieaă profile laminate în formă de I U sau L (nexele a b c d) Deformaţii la încovoierea pură simetrică Deoarece pe porţiunile de bară solicitate la încovoiere pură M const. din relaţia (8.9) reultă că în caul barelor de secţiune constantă şi din acelaşi material se obţine ρ M EI const. (8.5) Deci la încovoierea pură ρ const. bara se deformeaă în formă de arc de cerc. În relaţia (8.5) produsul E I se numeşte modùl de rigiditate la încovoiere. cesta este util în special la studiul barelor de secţiune eterogenă deci la bare din mai multe materiale.
143 8. ÎNCOVOIERE BRELOR Energia de deformaţie la încovoierea pură Pentru un element de bară de lungime dx solicitat la încovoiere de momentul M rotirea relativă a secţiunilor de la capete este (8.9) M dx d ϕ. EI Lucrul mecanic efectuat de cuplul M pe rotirea elastică d ϕ se înmagaineaă în elementul de bară sub formă de energie potenţială de deformaţie M dx du M dϕ. EI Energia acumulată de întreaga bară are expresia U M dx. (8.6) EI celaşi reultat se obţine dacă în expresia U σ x din formula (8.0) şi inerţie axial. V σ x dv se înlocuieşte E d V d dx folosind definiţia (7.6) a momentului de 8. Tensiuni la încovoierea oblică Încovoierea oblică pură este solicitarea produsă în secţiunea transversală a unei bare de un moment al cărui vector nu este dirijat în lungul unei axe centrale principale de inerţie şi care este constant în lungul barei. În continuare se vor considera componentele M şi M ale acestui moment încovoietor în lungul axelor O respectiv O care trec prin centrul de greutate O al suprafeţei secţiunii transversale dar nu sunt axe principale de inerţie. Pentru simplificarea expunerii se renunţă la notaţia cu bară deasupra literelor utiliată în capitolul Calculul faţă de axe centrale oarecare Se fac următoarele ipotee: a) barele au secţiune constantă; b) momentul încovoietor este constant în lungul barei având vectorul dirijat perpendicular pe axa longitudinală a barei; c) secţiunile transversale plane înainte de încovoierea
144 44 REZISTENŢ MTERILELOR barei rămân plane după încovoiere şi perpendiculare pe axa deformată a barei; d) raele de curbură ale barei deformate sunt mari în comparaţie cu dimensiunile transversale; e) elemente longitudinale ale barei sunt solicitate doar la întindere sau compresiune nu există tensiuni transversale; f) modulul de elasticitate longitudinal al materialului barei are aceeaşi valoare la întindere şi la compresiune. Fig. 8.7 Relaţii între deplasări şi deformaţii specifice Ca o consecinţă directă a ipoteei secţiunii plane deplasarea longitudinală a unui punct P de coordonate are forma generală u x u + ϕ ψ (8.7) unde u este o deplasare de translaţie în lungul axei Ox ϕ este unghiul de rotaţie al secţiunii faţă de axa O şi ψ este unghiul de rotaţie faţă de axa O. unde lungirea specifică este du ε dx dux ε x ε + κ κ. (8.8) dx dϕ κ dx dψ κ. (8.9) dx În relaţiile (8.9) κ şi κ sunt curburile fibrei medii a barei în planele xo respectiv xo. Indicii corespund axelor faţă de care au loc rotirile respective.
145 8. ÎNCOVOIERE BRELOR 45 Relaţia între tensiuni şi deformaţii specifice plicând legea lui Hooke (.) reultă x x ( ε + κ κ ) σ E ε E (8.0) relaţie valabilă numai pentru materiale liniar-elastice. Tensiunile normale de încovoiere variaă liniar cu distanţele la axele de coordonate. Condiţii de echilibru Distribuţia de tensiuni este echivalentă static cu momentul încovoietor din secţiune forţa axială fiind ero. Din relaţiile de echivalenţă (.4) între tensiunile σ şi eforturile secţionale se obţine x N σ d 0 (8.) x M i σ x d M (8.) M i σ d M. (8.) Înlocuind expresia (8.0) în relaţia (8.) se obţine x d + κ E d κ E d ε E 0. Deoarece axele de coordonate sunt axe centrale momentele statice sunt nule şi reultă ε 0 căci forţa axială este nulă. deci relaţia (8.0) devine x σ κ E κ E. (8.4) Înlocuind expresia (8.4) în relaţiile (8.) şi (8.) se obţine d κ E d κ E M (8.5) d κ E d κ E M. (8.6) sau pe baa relaţiilor de definiţie ale momentelor de inerţie (7.6) şi (7.7) M κ I κ I (8.5 a) E M κ I κ I (8.6 b) E de unde reultă curburile
146 46 REZISTENŢ MTERILELOR I M + I M κ E I I I I M + I M κ. (8.7) E I I I Înlocuind expresiile (8.7) în relaţia (8.4) se obţine formula tensiunilor normale la încovoierea oblică faţă de axe centrale principale I M + I M I M + I M σ x +. (8.8) I I I I I I xa neutră este linia din planul secţiunii transversale în lungul căreia tensiunile σ x sunt nule. ceastă axă se află la intersecţia planului secţiunii transversale cu planul neutru care trece prin centrul de greutate al secţiunii. Egalând expresia (8.8) cu ero reultă că axa neutră este o linie dreaptă de ecuaţie I M + I M. (8.9) I M + I M Planul care conţine fibra medie deformată a barei este perpendicular pe axa neutră. El nu coincide cu planul forţelor care este perpendicular pe vectorul moment de componente M şi M. De aici denumirea de încovoiere oblică. Dacă M 0 ecuaţia (8.8) se reduce la iar ecuaţia axei neutre este I I σ x M (8.0) I I I I. (8.) I Se observă că dacă I 0 ecuaţia (8.0) se reduce la formula lui Navier (8.0) stabilită pentru încovoierea simetrică. 8.. Calculul faţă de axe centrale principale Dacă se înlocuieşte I 0 în ecuaţia (8.8) reultă M M σ x + (8.) I I formulă valabilă atunci când axele O şi O sunt axe centrale principale. În acest ca momentele de inerţie I şi I sunt momentele de inerţie principale I sau I
147 8. ÎNCOVOIERE BRELOR 47 funcţie de forma secţiunii. Pentru simplificare s-a renunţat la notaţia cu bară deasupra literelor. Dacă acţioneaă un singur moment încovoietor M al cărui vector este înclinat cu unghiul α faţă de axa principală O atunci M M cosα şi M M sinα. sau Relaţia (8.) devine M sinα M cosα σ x + (8.) I I Ecuaţia axei neutre se obţine pentru σ 0 : Dacă sinα cosα + I I x 0 I tg α tg β. (8.4) I I I atunci β α deci înclinarea axei neutre diferă de înclinarea vectorului moment încovoierea este oblică. Dacă I I sau dacă α 0 atunci cele două direcţii coincid planul de încovoiere este perpendicular pe axa neutră. Exemplul 8. Bara în consolă din figura 8.E a de lungime m are secţiunea nesimetrică de la Exemplul 7. şi este solicitată de forţa verticală F 00 N care trece prin centrul de greutate al secţiunii din capăt. Se cere tensiunea normală maximă din bară. Reolvare Momentul încovoietor este maxim în secţiunea din încastrare M F Nmm M 0. Metoda. Calculul faţă de axe centrale oarecare Tensiunile normale se calculeaă cu relaţia (8.0). 5
148 48 REZISTENŢ MTERILELOR Centrul de greutate al secţiunii este localiat în figura 8.E b. Momentele de inerţie şi momentul centrifugal calculate la Exemplul 7. faţă de axe centrale oarecare sunt 4 mm 4 I Ecuaţia axei neutre (8.) se scrie deci axa neutră este înclinată cu unghiul 4 mm 4 I I tgδ I I mm 4. δ 44 faţă de axa G. Punctul cel mai îndepărtat de această axă este punctul P de coordonate P 40 mm. P 487 mm Din relaţia (8.0) se obţine σ P M I I P I I I P N mm. a Fig. 8.E b Metoda. Calculul faţă de axe centrale principale Tensiunile normale se calculeaă cu relaţia (8.)
149 8. ÎNCOVOIERE BRELOR 49 M M σ. x + I I Momentele de inerţie principale calculate la Exemplul 7. sunt I mm I 59 0 mm iar direcţiile principale fac unghiurile θ 77 şi θ θ + 90 cu axa G (deci α 77 ). Sistemul de axe centrale principale notat G este rotit cu unghiul 0 θ 77 faţă de sistemul iniţial G. Ecuaţia axei neutre (8.4) se scrie I tgα tg tgβ I 59 deci axa neutră este înclinată cu unghiul 0 β 6789 faţă de axa G. 0 Se observă că β α δ deci reultatul coincide cu cel obţinut prin prima metodă. Punctul cel mai îndepărtat de această axă este punctul P de coordonate P 487 mm P 40 mm. Transformarea de coordonate (7.0) se mai scrie (- 77 ) + sin (- 77 ) (- 77 ) sin (- 77 ) cosθ + sinθ cos cosθ sinθ cos +. Coordonatele punctului P în sistemul de axe centrale principale sunt mm P P P mm. P P P 0 sunt Componentele momentului încovoietor în lungul axelor centrale principale ( 77 ) 8 0 Nmm M M cosθ 0 cos ( 77 ) Nmm M M sinθ 0 sin. Reultă că tensiunea normală în punctul P este
150 50 REZISTENŢ MTERILELOR σ P M I P M + I P (-7) Se obţine deci acelaşi reultat ca prin prima metodă însă efortul de calcul este mai mare. N mm 8. Tensiuni de forfecare la încovoierea simplă Deobicei încovoierea este reultatul acţiunii unor sarcini transversale asupra barelor. În general în secţiunea transversală acţioneaă pe lângă momentul încovoietor care produce tensiuni normale şi o forţă tăietoare care produce tensiuni tangenţiale şi deci deformaţii suplimentare de lunecare. Solicitarea produsă de acţiunea simultană a momentului încovoietor şi a forţei tăietoare se mai numeşte încovoiere simplă. Din considerente baate pe dualitatea tensiunilor tangenţiale în dreptul fibrelor extreme tensiunile tangenţiale paralele cu forţa tăietoare sunt nule având diverse legi de variaţie pe înălţimea secţiunii funcţie de forma acesteia. Datorită distribuţiei neliniare a tensiunilor tangenţiale apare o deplanare a secţiunii transversale deci ipotea lui Bernoulli nu mai poate fi utiliată la stabilirea formulei tensiunilor normale. Se constată că la bare cu secţiuni având raportul h (între înălţimea secţiunii şi lungimea barei) relativ mic (< 0 ) calculul tensiunilor normale se poate face cu formulele deduse pentru încovoierea pură. La barele care au raportul h relativ mare formula lui Navier (8.0) şi în general formulele stabilite în Teoria elasticităţii pentru învoierea pură dau valori ale tensiunilor normale mai mari decât cele reale. În continuare considerând valabilă distribuţia liniară a tensiunilor normale de încovoiere care neglijeaă deplanarea se deduce o expresie aproximativă a tensiunilor tangenţiale produse de forţa tăietoare utiliând numai o condiţie de echilibru. Condiţiile reale privind geometria deformaţiilor se pot folosi numai la stabilirea unei soluţii exacte prin metodele Teoriei elasticităţii. 8.. Formula lui Juravski Fie un element de lungime dx detaşat dintr-o bară solicitată la încovoiere simplă (fig. 8.8) în lungul căruia se consideră că forţa tăietoare este constantă. În
151 8. ÎNCOVOIERE BRELOR 5 secţiunea din stânga acţioneaă eforturile acţioneaă M + dm şi T. M şi T iar în secţiunea din dreapta Fig. 8.8 Se secţioneaă apoi acest element cu un plan paralel cu xo la distanţa de acesta obţinându-se elementul desenat cu linii mai groase. Pe feţele frontale ale acestui element acţioneaă tensiuni normale σ x respectiv σ x + dσ x iar pe faţa superioară acţioneaă tensiuni tangenţiale complementare celor produse de forţa tăietoare în secţiunea transversală. Ipotea lui Juravski. Se consideră că în lungul unei linii BC paralele cu axa neutră O componentele tensiunilor tangenţiale τ x paralele cu forţa tăietoare sunt uniform distribuite. Reultanta forţelor elementare σ x d produse de tensiunile normale pe faţa din stânga a elementului considerat este unde M M M S N d (8.5) I σ xd d I BCD BCD I BCD S este momentul static al suprafeţei BCD faţă de axa centrală O. Pe faţa din dreapta a elementului acţioneaă forţa ( M + dm ) S + dn I N
152 5 REZISTENŢ MTERILELOR iar pe faţa superioară acţioneaă forţa longitudinală de forfecare τ x b dx unde b BC. Ecuaţia de echilibru a forţelor ce acţioneaă asupra elementului considerat se scrie sau Se obţine Deoarece d N M dx cunoscută ca formula lui Juravski. ( N + dn ) 0 τ b d x. + x dn τ x (8.6) b dx d M S S dm τ x. b dx I b I dx T şi τ τ reultă expresia tensiunilor tangenţiale x x T S τ x (8.7) b I Formula (8.7) este strict valabilă doar pentru bare de secţiune constantă având forţa tăietoare constantă în lungul barei. Totuşi se constată că la bare cu dimensiuni transversale mult mai mici decât lungimea barei eroarea introdusă de variaţia forţei tăietoare în lungul barei este relativ mică. Se observă că τ x depinde de raportul b deci de ordonata la nivelul căreia se evalueaă tensiunile tangenţiale. Secţiunea dreptunghiulară S În caul secţiunii dreptunghiulare (fig. 8.9) b h I şi deci h h b h b h + 4 S b 4 8 h T S T 4 τ x. (8.8) b I b h h
 max unde b h. Fig. 8.9 Fig. 8.0 Secţiunea circulară În caul secţiunii circulare de raă r (fig. 8.0) b r sinθ r cosθ d r sinθ dθ iar aria suprafeţei elementului haşurat este este d b d r sin θ dθ.")
153 8. ÎNCOVOIERE BRELOR 5 Componentele paralele cu forţa tăietoare ale tensiunilor tangenţiale au o distribuţie parabolică pe înălţimea secţiunii. Valoarea maximă la nivelul axei neutre este T τ x (8.9) max unde b h. Fig. 8.9 Fig. 8.0 Secţiunea circulară În caul secţiunii circulare de raă r (fig. 8.0) b r sinθ r cosθ d r sinθ dθ iar aria suprafeţei elementului haşurat este este d b d r sin θ dθ. Momentul static al suprafeţei situate sub coarda b calculat faţă de axa O θ θ S d r sin θ cosθ dθ r 0 0 sin θ. Reultă expresia tensiunilor tangenţiale paralele cu forţa tăietoare τ T r sin θ 4 π r r sinθ 4 T S x b I 4 T sin θ (8.40) unde aria cercului π r. Valoarea maximă la nivelul axei neutre este
 momentul de inerţie axial este I iar momentul static al triunghiului 6 situat sub linia BC la nivelul căreia se calculeaă tensiunile este h h b h h S b + + deci tensiunile tangenţiale paralele cu")
154 54 REZISTENŢ MTERILELOR 4 T τ x. (8.4) max Fig. 8. Fig. 8. Secţiunea triunghiulară În caul secţiunii triunghiulare simetrice cu baa c şi înălţimea h (fig. c h 8.) momentul de inerţie axial este I iar momentul static al triunghiului 6 situat sub linia BC la nivelul căreia se calculeaă tensiunile este h h b h h S b + + deci tensiunile tangenţiale paralele cu forţa tăietoare au expresia T S T h h τ x +. (8.4) b I c h Tensiunea tangenţială maximă nu mai apare la nivelul axei neutre ci la distanţa h 6 spre vârful triunghiului având valoarea unde aria triunghiului ch. T τ x (8.4) max Secţiunea în formă de I La secţiunea în formă de I (fig. 8.) diagrama tensiunilor tangenţiale de forfecare τ x este formată din arce de parabolă cu o discontinuitate în dreptul trecerii de la tălpi la inima profilului unde coarda b are o variaţie bruscă.

155 8. ÎNCOVOIERE BRELOR 55 Comparaţie între valorile tensiunilor σ şi τ Fie bara din figura (8.) cu secţiunea dreptunghiulară b h. Tensiunea normală maximă apare în încastrare şi are valoarea M max F 6 F σ max W. b h b h 6 Tensiunea tangenţială maximă este Se observă că raportul depinde de raportul T F τ max. b h τ σ max max h 4 h între înălţimea secţiunii transversale şi lungimea barei. La barele cu raportul h < 0 la care de obicei ipotea lui Bernoulli este verificată tensiunile tangenţiale sunt neglijabile faţă de cele normale. Dimensionarea se face numai pe baa momentului încovoietor. 8.. Lunecarea longitudinală Se consideră două bare suprapuse (fig. 8.4 a) în consolă solicitate la încovoiere de forţa F. Fig. 8. Fig. 8.4 Dacă barele nu sunt îmbinate şi se neglijeaă frecarea pe suprafeţele de contact deformarea are loc ca în figura 8.4 b. Fibrele de sus ale barei de jos sunt întinse în timp ce fibrele de jos ale barei de sus sunt comprimate cele două
156 56 REZISTENŢ MTERILELOR suprafeţe în contact lunecând una faţă de cealaltă. Fenomenul se numeşte lunecare longitudinală. Dacă barele sunt îmbinate ele lucreaă împreună la încovoiere ca o singură grindă compusă. Elementele de asamblare împiedică lunecarea longitudinală fiind solicitate la forfecare (fig. 8.4 c). Dimensionarea acestora se face pe baa valorii forţei de lunecare longitudinală N. Fig. 8.5 Fie grinda metalică din figura 8.5a îmbinată prin sudare. Conform relaţiilor (8.6) şi (8.7) forţa de lunecare are expresia unde N T S τ x b dx I h + t S b t I ( h + t) ( b t) b h T F. Cordonul de sudură este solicitat la forfecare (fig. 8.5 b). În planul de forfecare (haşurat) se devoltă tensiuni tangenţiale. Considerând că acestea sunt uniform distribuite reultă N τ a deci forţa capabilă a unui cordon continuu de sudură este N cap τ a unde τ as este reistenţa admisibilă la forfecare a cordonului de sudură. as
157 8. ÎNCOVOIERE BRELOR 57 reultă Egalând forţa de lunecare cu forţa capabilă a două cordoane de sudură T I S τ a as deci grosimea minimă a cordonului de sudură este unde S T a I τ as S este momentul static al suprafeţei corespunătoare tălpii secţiunii calculat faţă de axa O. 8.. Modelul de bară cu forfecare Variaţia neliniară a tensiunilor tangenţiale pe înălţimea secţiunii transversale a unei bare solicitate la încovoiere simplă (fig. 8.6 a) produce deformaţii de lunecare distribuite neuniform pe înălţimea secţiunii (fig. 8.6 b) deci deplanarea acesteia (fig. 8.6 c). La secţiuni dublu simetrice lunecările sunt maxime la mijlocul secţiunii şi nule în fibrele extreme. Fig. 8.6 Se poate lucra cu un model de bară baat pe o ipoteă modificată a secţiunii plane propusă de Timoshenko. Se admite că o secţiune iniţial plană rămâne plană după solicitarea barei la încovoiere simplă dar nu mai este perpendiculară pe fibra medie deformată a barei (fig. 8.6 e).
158 58 REZISTENŢ MTERILELOR Se consideră că rotirea secţiunii are o componentă datorită tensiunilor normale (fig. 8.6 d) şi o componentă constantă datorită lunecărilor produse de tensiunile tangenţiale. Fie γ m unghiul de lunecare specifică mediu constant pe înălţimea secţiunii (fig. 8.6 e). Pe baa legii lui Hooke (.) se calculeaă o tensiune tangenţială medie constantă pe înălţimea secţiunii τ G γ. unde unde Forţa tăietoare în secţiune este T τ d τ τ x este tensiunea tangenţială paralelă cu forţa tăietoare. Tensiunea tangenţială medie se calculeaă cu relaţia τ m f T f k (8.44) f este o arie echivalentă numită aria de forfecare iar k f este factorul de forfecare. Pentru determinarea factorului k f se egaleaă expresiile energiei de deformaţie la forfecare pe unitatea de lungime a barei baate pe tensiunile tangenţiale reale şi pe tensiunea tangenţială medie τ τ m T d f τ d G G G G k Reultă formula factorului de forfecare k f ( τ d) f f. (8.45) τ d Calcule mai precise baate pe metodele Teoriei elasticităţii arată că pentru secţiunea inelară cu diametrul exterior D şi diametrul interior d se obţine k f 7 + 6ν 0 + ν d D ν 6 + 6ν + ( d D) m m (8.46) unde ν este coeficientul de contracţie transversală al materialului barei. La o bară cu secţiune circulară plină din oţel k f
159 8. ÎNCOVOIERE BRELOR 59 La secţiunea dreptunghiulară factorul de forfecare are expresia independentă de raportul laturilor. ( + ν ) La o bară dreptunghiulară din oţel k f k f (8.47) + ν Modelul de bară cu deformaţii de forfecare este utiliat mai mult la studiul vibraţiilor barelor unde se include şi un moment încovoietor distribuit liniar datorit inerţiei la rotaţie a elementelor barei. Modelul de bară Timoshenko include atât efectul forfecării cât şi al inerţiei la rotaţie. 8.4 Bare cu secţiune variabilă În lungul unei bare solicitate la încovoiere simplă momentul încovoietor este variabil. La dimensionarea barelor cu secţiune constantă se egaleaă tensiunea normală maximă calculată în secţiunea în care acţioneaă momentul încovoietor maxim cu reistenţa admisibilă la încovoiere. Reultă o supradimensionare a barei în celelalte secţiuni în care momentul încovoietor este mai mic deci tensiunile efective sunt mai mici decât reistenţa admisibilă. O soluţie mai raţională din punct de vedere al economiei de material deci a reducerii greutăţii o constituie barele cu secţiune variabilă. În afara condiţiei de reistenţă forma acestora poate fi determinată de condiţii de montaj de exemplu montarea rulmenţilor la capetele arborilor maşinilor. Fig. 8.7
160 60 REZISTENŢ MTERILELOR 8.4. rborele în trepte La arborii maşinilor forma tehnologică se realieaă prin variaţia în trepte a diametrului. stfel la bara din figura 8.7 tronsonul se dimensioneaă pe baa momentului încovoietor M tronsonul - pe baa momentului M tronsonul - pe baa momentului M. Faţă de soluţia cu secţiune constantă în lungul barei (linie întreruptă) se obţine o bară mai uşoară dar cu costul suplimentar al prelucrării. Desigur la saltul de diametru trebuie să se ţină cont de concentrarea tensiunilor Grinda de egală reistenţă Se pot proiecta bare cu secţiune variabilă realiate astfel încât în orice secţiune tensiunea normală maximă să aibă aceeaşi valoare de exemplu să fie egală cu reistenţa admisibilă. cestea se numesc grini de egală reistenţă la încovoiere. a Fig. 8.8 b Trebuie îndeplinită condiţia () x () x M σ max () x σ a const. W
161 8. ÎNCOVOIERE BRELOR 6 deci modulul de reistenţă axial ca şi momentul încovoietor () x x M W să aibă aceeaşi lege de variaţie în lungul barei W () x () x M. (8.48) σ Pentru bara din figura 8.8 a de grosime constantă h şi lăţime variabilă b relaţia (8.48) se scrie h 6 a a F x deci σ F 6 x σ h. (8.49) a Variaţia liniară a lăţimii duce la îndeplinirea condiţiei de egală reistenţă la încovoiere. Forma din figura 8.8 a este netehnologică. Prin tăierea barei în fâşii şi suprapunerea fâşiilor ca în figura 8.8 b apoi completarea cu structura simetrică se realieaă arcul cu foi întâlnit în suspensia unor vehicule Concentrarea tensiunilor la încovoiere Ca şi la răsucire discontinuităţile geometrice (de exemplu: arbore în trepte găuri transversale degajări şanţuri de pană) produc variaţii locale importante ale tensiunilor ale căror valori maxime sunt mai mari decât cele calculate în ipotea constanţei secţiunii transversale. Tensiunile maxime se calculeaă cu relaţia σ max K σ unde σ nom este tensiunea obţinută neglijând efectul de concentrare a tensiunilor iar K este factorul teoretic de concentrare a tensiunilor elastice. t Pentru un arbore în trepte solicitat la încovoiere variaţia factorului de concentrare a tensiunilor K t în funcţie de raportul între raa de racordare şi diametrul mic este redată în figura 8.9 pentru cinci valori ale raportului diametrelor celor două porţiuni. t nom Rae de racordare mici produc valori proiectare. K t mari deci trebuie evitate în
162 6 REZISTENŢ MTERILELOR Fig. 8.9 [4] 8.5 Bare cu secţiune eterogenă Barele din materiale diferite sunt utiliate în structuri aeronautice la grini din beton armat la schiuri cu secţiune sandvici având o inimă din lemn sau material plastic lipită între două feţe de aluminiu la ambarcaţiuni sportive etc. Feţele din materiale mai reistente placajele sau armăturile sunt astfel dispuse încât să preia tensiunile normale mari care apar la marginile de sus şi de jos ale barei în timp ce materialul inimii preia tensiunile tangenţiale maxime de forfecare şi poiţioneaă feţele.
163 8. ÎNCOVOIERE BRELOR Tensiuni la încovoierea pură simetrică Calculul la încovoiere pură al barelor de secţiune eterogenă se baeaă pe relaţiile stabilite pentru barele de secţiune omogenă utiliând în plus condiţia de deformaţie impusă de lipirea sau solidariarea celor două materiale. În figura 8.0 a se preintă o bară cu secţiune dublu simetrică în care inima este placată cu fâşii identice din materialul. In figura 8.0 b se arată o secţiune cu o singură axă de simetrie la care materialul este protejat la baă cu o platbandă din materialul. Deobicei E > E. mbele bare sunt solicitate la încovoiere pură simetrică de un moment M M. a Fig. 8.0 b Condiţiile de echilibru Deoarece nu există forţă axială σ d + σ d 0. Suma momentelor M şi M preluate de fiecare material este egală cu momentul încovoietor total M M d + M σ d + σ M. Compatibilitatea deformaţiilor Unghiurile de rotire sunt egale pentru cele două materiale ϕ. (8.50) ϕ
164 64 REZISTENŢ MTERILELOR Relaţiile tensiuni - deformaţii specifice Din legea lui Hooke ε σ E ε σ E se obţine I E I E M I E M I E M + (8.5) deci tensiunile sunt I E I E M E I M + σ (8.5 a) I E I E M E I M + σ. (8.5 b) La secţiunea dublu simetrică b d I ( ) 4 4 d h b d h d h b I +. La secţiunea cu o singură axă de simetrie axa neutră nu mai trece prin centrul geometric al secţiunii. Pentru utiliarea relaţiilor de mai sus trebuie calculată poiţia axei neutre. O metodă convenabilă constă în transformarea secţiunii eterogene într-o secţiune echivalentă dintr-un singur material Secţiuni echivalente La secţiunea din figura 8.0 b se noteaă d distanţa de la axa neutră la interfaţa între cele două materiale. La nivelul interfeţei alungirile specifice în cele două materiale sunt egale E E σ σ (8.5) dar tensiunile σ şi σ diferă I d M σ I d M σ. Din relaţiile (8.5) se obţine + + I E E I d I E E I d M σ σ (8.54)
165 8. ÎNCOVOIERE BRELOR 65 unde I şi I sunt momentele de inerţie faţă de axa neutră. Fig. 8. E Se observă că în relaţiile (8.54) apare termenul I care se scrie E E E I E E b d + b d E E d b + d d b + d E unde b b. Reultă că acelaşi moment încovoietor se obţine dacă partea de E bară din materialul este înlocuită cu o bară executată din materialul de aceeaşi E înălţime dar cu lăţimea b (fig. 8. a). În acest mod se construieşte o secţiune E echivalentă omogenă numai din materialul la care poiţia axei neutre şi distribuţia tensiunilor pe înălţime (fig. 8. c) se calculeaă mai uşor. Se poate apoi determina distribuţia relă de tensiuni (fig. 8. d) utiliând relaţia (8.5). nalog materialul poate fi înlocuit cu o fâşie echivalentă executată din E materialul având aceeaşi înălţime d dar lăţimea b (fig. 8. b). În figura E 8. s-a considerat E > E şi b b Proprietăţi secţionale echivalente La bare cu secţiune eterogenă de formă oarecare se pot utilia proprietăţi secţionale echivalente ponderate cu ajutorul unui modul de elasticitate de referinţă notat în continuare E 0. Pentru aceasta momentele statice şi momentele de inerţie se redefinesc pe baa unei suprafeţe elementare echivalente (fig. 8.)
166 66 REZISTENŢ MTERILELOR E d ~ d. E 0 Momentele statice echivalente faţă de axele oarecare O se definesc prin S ~ d ~ S ~ d ~. Momentele de inerţie echivalente sunt prin definiţie ~ I d ~ ~ I d ~ ~ I d ~. Integralele de mai sus se calculeaă ca sume de proprietăţi ponderate pentru suprafeţele ocupate de fiecare material diferit. Fig. 8. În general calculul tensiunilor se face faţă de axe centrale. Poiţia centrului de greutate echivalent C se determină din condiţia ca momentele statice echivalente în sistemul de coordonate central C să fie nule: de unde reultă S ~ S ~ ~ S ~ ~ C d ~ d ~ ( - ~ ) C d ~ 0 ( - ~ ) d 0 C ~ S ~ ~ ~ E C ~. E0 Este evident că în general centrul de greutate echivalent C coincide cu centrul (de greutate) geometric G al suprafeţei numai la secţiuni omogene.

167 8. ÎNCOVOIERE BRELOR 67 Pentru simplificarea expunerii coordonatele în sistemul central echivalent s-au notat tot cu bară deasupra literei. Momentele de inerţie faţă de axe centrale paralele cu axele iniţiale sunt ~ ~ I ~ ~ ~ ~ I C I ~ ~ I ~ C I I ~ ~ ~ ~ C C. Tensiunile normale la încovoierea oblică faţă de axe centrale oarecare se calculeaă cu relaţia ~ ~ ~ ~ σ E I M + I M + I M + ~ ~ ~ I ~ I M E I I I ~ I ~ x I 0 iar faţă de axe centrale principale pentru M 0 cu relaţia echivalentă cu formula lui Navier. E M σ x ~ E I Deformaţii la încovoiere dmiţând valabilitatea ipoteei secţiunilor plane studiul deformaţiilor barelor drepte solicitate la încovoiere se reduce la studiul formei deformate a liniei care uneşte centrele de greutate ale secţiunilor transversale denumită fibra medie deformată sau linia elastică a barei. Din acest motiv caracteristicile geometrice ale secţiunii barei care intervin în calculul deformaţiilor la încovoiere se calculeaă faţă de axe centrale. Pentru simplificarea expunerii se renunţă la notaţia cu bară deasupra literei utiliată în Capitolul 7. a Fig. 8. b Forma liniei elastice se defineşte prin doi parametri: săgeata - deplasarea liniară transversală şi panta (tangentei la linia elastică) sau deformaţia unghiulară - egală cu rotirea secţiunii transversale dacă se neglijeaă forfecarea (fig. 8.).
168 68 REZISTENŢ MTERILELOR Se utilieaă următoarele notaţii: deplasările liniare în lungul axelor Ox O O sunt u v w poitive în sensul poitiv al axelor. Deplasările unghiulare (rotirile) faţă de axele Ox O O sunt θ ϕ ψ poitive conform regulii burghiului drept. Se observă că la studiul deplasărilor în planul xo (fig. 8. a) pantele au semn contrar rotirilor (sensul poitiv este dat de rotirea axei O spre Ox). În planul xo (fig. 8. b) semnele pantelor şi rotirilor coincid Deformaţii la încovoierea simetrică Se vor studia deformaţiile în planul xo (fig. 8. a) pentru bare solicitate de forţe cuprinse într-un plan vertical de simetrie sau de cupluri cu vectorul moment perpendicular pe acest plan. Săgeţile w sunt poitive când deplasarea este în jos. Pantele sunt Curbura este dată de relaţiile (8.) şi (8.9) dw ϕ. (8.55) dx d d w M κ ϕ (8.56) dx dx E I de unde reultă d w M. (8.57) dx E I Relaţia (8.57) se numeşte ecuaţia diferenţială a liniei elastice a barei. Prin integrarea acestei ecuaţii se obţin expresiile analitice ale pantei şi săgeţii în orice secţiune a barei. La bare cu încărcare relativ simplă având maximum două porţiuni cu expresii diferite ale momentului încovoietor se poate aplica metoda integrării analitice a ecuaţiei (8.57). După prima integrare reultă panta dw M ϕ dx + C. (8.58) dx E I După a doua integrare reultă săgeata d w M w dx dx E I dx dx + C x + C. (8.59)
169 8. ÎNCOVOIERE BRELOR 69 Constantele de integrare C şi C se determină pe baa valorilor pantei şi săgeţii în anumite puncte deobicei din condiţiile la limită (de reemare) ale barei. La stabilirea expresiei analitice a momentului încovoietor M () x utilieaă convenţia de semne care a stat la baa obţinerii relaţiei (8.57). Relaţiile diferenţiale conduc la ecuaţiile dm dt T p dx d dx w T EI dx (8.60) se 4 d w p 4 dx EI. (8.6) Din ecuaţia (8.6) reultă că pe porţiunile de bară fără sarcină distribuită deci pentru p 0 w () x este un polinom de gradul trei în x (derivata a patra este nulă). Deci deformata barei nu mai este un arc de cerc ca la încovoierea pură ci o curbă de gradul trei funcţie de distanţa x în lungul barei. Deformata porţiunilor solicitate de o sarcină transversală uniform distribuită p const. este descrisă de un polinom de gradul patru (derivata a cincea este nulă) şi pe măsură ce legea de distribuţie a sarcinii distribuite este mai complicată creşte gradul polinomului care descrie deformata barei. Bara în consolă încărcată cu o forţă în capăt Se consideră bara din figura 8.4 cu EI const. Momentul încovoietor în secţiunea x are expresia () x F F x M +. Ecuaţia diferenţială a liniei elastice a barei este EI d w M dx Prin două integrări succesive se obţine E I () x F F x dw x E I F x F + dx ϕ C.
 EI F w EI În capătul barei pentru x x 6 x săgeata maximă este. (8.6) w max F. (8.64) EI Fig. 8.")
170 70 REZISTENŢ MTERILELOR x x E I w F F + C x + C. 6 Constantele de integrare se determină pe baa condiţiilor la limită. În încastrare panta şi săgeata sunt nule ϕ x0 0 w 0 x0. Reultă C C 0 deci expresiile pantei şi săgeţii devin F x x ϕ (8.6) EI F w EI În capătul barei pentru x x 6 x săgeata maximă este. (8.6) w max F. (8.64) EI Fig. 8.4 Fig. 8.5 Bara simplu reemată încărcată cu sarcină uniform distribuită Momentul încovoietor în secţiunea x a barei din figura 8.5 are expresia M () x q q x x. Ecuaţia diferenţială a liniei elastice este Se integreaă de două ori d w q q x EI x + dx q q x E I ϕ x + + C 4 6.
171 8. ÎNCOVOIERE BRELOR 7 q q x EI w x + + C x + C 4 apoi se determină constantele de integrare din condiţiile ca pe reaeme săgeata să fie nulă w x0 0 w 0. Se obţine C 0 şi q C. 4 EI Reultă expresiile pantei şi săgeţii x 4 q x x ϕ + (8.65) EI ( x + x x ) 4 4 q x x x q w +. (8.66) EI EI Săgeata maximă la mijlocul barei (pentru x ) este w max 4 5 q. (8.67) 84 EI Unghiul de deformaţie pe reaemul din stânga (pentru x 0 ) este q ϕ. (8.68) 4 EI lte metode pentru calculul deformaţiilor la încovoiere sunt preentate în capitolul Deformaţii la încovoierea oblică În continuare calculul se face faţă de axe centrale oarecare. Săgeţile w şi v sunt poitive în sensul poitiv al axelor O respectiv O. Pantele sunt dw dv ϕ ψ. (8.69) dx dx Curburile sunt date de relaţiile (8.) (8.9) şi (8.7)
172 7 REZISTENŢ MTERILELOR derivare d d w I M + I M κ ϕ (8.70) dx dx E ( I I I ) dψ d v I M + I M κ. (8.7) dx dx E ( I I I ) Reultă ecuaţiile diferenţiale decuplate ale săgeţii d w I M + I M dx E ( I I I ) Utiliând relaţiile diferenţiale d w I T I T dx E ( I I I ) Utiliând relaţiile diferenţiale 4 d w I p I p 4 dx E ( I I I ) d v I M dx E dm dx dt ( I I I ) + I M T şi T d v I dx E dx T. (8.7) dm se obţine prin dx ( I I I ) I dt dx T p şi p 4 d v I 4 dx E p ( I I I ) I. (8.7) se obţin ecuaţiile p. (8.74) din care pentru sarcini şi condiţii la limită date se obţin expresiile analitice ale componentelor w şi v ale deplasării transversale a punctelor liniei elastice a barei. Bară în consolă cu secţiune nesimetrică Fie o bară în consolă din profil cornier cu aripi neegale aşeat ca în figura 8.6 acţionată de o forţă verticală aplicată în lungul axei centrale O în capătul barei. Deoarece nu există sarcini distribuite ecuaţiile (8.74) devin deci deplasările au expresii de forma 4 d w d v dx dx () x C x + C x + C x C4 w + () x B x + B x + B x + B4 v 4
173 8. ÎNCOVOIERE BRELOR 7 unde B i şi limită. C i 4 sunt constante care se determină din condiţiile la i Fig. 8.6 În încastrare condiţiile la limită sunt v () 0 0 ψ () 0 0 w () 0 0 ϕ () 0 0. La capătul liber condiţiile la limită sunt M () 0 M () 0 T () 0 T () F. Deoarece ambele momente sunt ero prima relaţie (8.7) devine d dx w () 0 Din prima relaţie (8.7) se obţine Reultă C C 0 4 deci expresia deplasării w () x. d w I F (). dx E ( I I I ) 6 E ( I I I ) I F C C C w () x este F I 6 E ( - x) ( I I I ) Pentru deplasarea în direcţia se obţine B B4 0 şi următoarele condiţii la capătul liber din care reultă d dx v x () 0 () d dx v. E I ( I I I ) F
174 74 REZISTENŢ MTERILELOR Săgeata totală este ( - x) F I x v () x. 6 E ( I I I ) ( v + w ) δ. Secţiunea barei fiind nesimetrică forţa verticală produce o deplasare pe o direcţie înclinată faţă de verticală deci încovoiere oblică Efectul forfecării La încovoierea simplă momentul încovoietor produce curbarea barei iar forţa tăietoare produce deformaţii suplimentare datorită forfecării. Studiul efectului forfecării asupra deformaţiilor la încovoiere se poate face adoptând ipotea secţiunii plane modificată de Timoshenko. Pe baa acesteia se introduce un unghi de lunecare specifică mediu constant pe înălţimea secţiunii barei şi o arie efectivă de forfecare (8.44) calculată înmulţind aria reală cu un factor de forfecare (8.45). a Fig. 8.7 b Echilibrul Ecuaţiile diferenţiale de echilibru (.7) şi (.8) sunt dm dx dt dx dm T dx T dt dx p p
175 8. ÎNCOVOIERE BRELOR 75 Geometria deformaţiei Curburile sunt date de relaţiile (8.9) dϕ κ dx dψ κ. dx Din figura (8.7) se obţin relaţiile între pantă rotirea secţiunii şi lunecarea specifică medie γ dv dw x ψ γ + ϕ d x x (8.75) d x Relaţiile între eforturi şi deformaţii specifice M κ E I T γ x G f M κ EI T γ x G f unde f k f iar k f este factorul de forfecare. În general acesta are valori diferite în cele două plane xo şi xo dar în continuare se consideră constant. Eliminând curburile şi lunecările specifice medii se obţine M T dψ EI dx M dϕ EI dx dv dw G f ψ T G f + ϕ. dx dx Eliminând momentele încovoietoare şi forţele tăietoare reultă ecuaţiile diferenţiale ale rotirilor şi săgeţilor EI d ψ G dx f dv d ϕ dw ψ 0 EI G 0 f ϕ + (8.76) dx dx dx G x x d d dx dψ d v w f p G dϕ d f + p dx. (8.77) Din relaţiile (8.76) se observă că la modelul de bară cu forfecare săgeţile şi rotirile sunt cinematic independente.
176 76 REZISTENŢ MTERILELOR 8.7 Centrul de forfecare La barele cu pereţi subţiri solicitate prin forţe perpendiculare pe axa barei în secţiunea transversală acţioneaă în afara tensiunilor normale produse de încovoiere tensiuni tangenţiale. În general tensiunile tangenţiale pot proveni din forfecare şi din răsucire. Pentru separarea acestora se calculeaă centrul de forfecare a cărui poiţie este funcţie numai de geometria secţiunii. Dacă forţa transversală din secţiune trece prin centrul de forfecare atunci se elimină răsucirea. Deci calculul momentului de răsucire se poate face numai după determinarea centrului de forfecare. Privită din punct de vedere al încovoierii problema se pune şi altfel. La secţiuni nesimetrice chiar dacă planul forţelor transversale trece prin axa barei în afară de încovoiere se produce şi răsucire. Pentru a produce numai încovoiere forţa transversală din secţiune trebuie să treacă prin centrul de forfecare numit şi centrul de încovoiere. Datorită dualităţii tensiunilor tangenţiale acestea trebuie să fie orientate paralel cu linia mediană a profilului. Reultă că în porţiunile profilului care nu sunt paralele cu forţa transversală exterioară acţioneaă tensiuni tangenţiale care nu au direcţia forţei tăietoare dar a căror mărime este totuşi proporţională cu aceasta. Forţele tăietoare care reultă din însumarea acestor tensiuni tangenţiale se pot reduce la un cuplu diferit de ero care produce răsucirea profilului. În caul profilelor subţiri deschise se aplică ipotea lui Juravski modificată conform căreia pe o fâşie subţire din planul secţiunii transversale perpendiculară pe linia mediană a profilului tensiunile tangenţiale provenind din forfecare sunt constante şi orientate în direcţia liniei mediane. şa cum s-a arătat în capitolul 6 tensiunile tangenţiale produse de răsucirea liberă variaă liniar pe grosimea peretelui fiind nule pe linia mediană. Pe baa ipoteei modificate a lui Juravski se calculeaă tensiunile tangenţiale provenind din forfecare. Se calculeaă apoi reultanta acestora şi faţă de poiţia punctului de aplicaţie al acesteia se calculeaă momentul de răsucire cu ajutorul căruia se determină în continuare tensiunile tangenţiale produse de răsucire. În caul profilului U din figura 8.8 a tensiunile tangenţiale din tălpi produc forţe tăietoare oriontale egale şi de sensuri contrare. cestea formeaă un cuplu faţă de axa Ox care tinde să producă răsucirea. ceasta este evitată dacă forţa verticală F este aplicată în punctul C centrul de forfecare al secţiunii producând un cuplu egal şi de sens contrar cu cel al forţelor oriontale (fig. 8.8b). Formula lui Juravski (8.7) se scrie
177 8. ÎNCOVOIERE BRELOR 77 T S τ (8.78) δ I unde δ este grosimea profilului în ona unde se calculeaă tensiunile de forfecare iar S este momentul static faţă de axa centrală principală O al porţiunii secţiunii transversale situate până la fâşia considerată. a Fig. 8.8 b La profilul din figura 8.8 a tensiunile tangenţiale în talpa inferioară au expresia T S T τ x δ I δ I δ h (8.79) deci variaă liniar fiind nule la marginea profilului şi maxime la inimă T δ h τ. (8.80) xmax I Forţa tăietoare oriontală dintr-o talpă este τ δ b xmax T δ hb T. (8.8) 4 I Cuplul forţelor oriontale este echilibrat de momentul forţei transversale F aplicate în centrul de forfecare la distanţa e de mijlocul inimii T
178 78 REZISTENŢ MTERILELOR T h F e. Reultă poiţia centrului de forfecare Th δ h b e (8.8) T 4 I sau înlocuind I δ h h + δ h 4 expresia independentă de grosimea profilului b e. (8.8) h + 6b 8.8 Tensiuni în bare curbe Fie un element de bară curbă delimitat de două secţiuni plane (între care există unghiul d ϕ ) şi solicitat la încovoiere pură prin momentul M (fig. 8.9). Se noteaă: R - raa centrului de greutate G R - raa interioară R - raa exterioară r - raa fibrei neutre e - excentricitatea axei neutre N - distanţa de la axa neutră N la o fibră oarecare d - distanţa de la axa neutră la fibra interioară d - distanţa de la axa neutră la fibra exterioară - aria suprafeţei secţiunii transversale. Geometria deformaţiei Fig. 8.9 Presupunând secţiunea din stânga fixă sub acţiunea momentului încovoietor secţiunea din dreapta se roteşte (în raport cu cea din stânga) cu unghiul
179 8. ÎNCOVOIERE BRELOR 79 ϕ d. Ca urmare o fibră oarecare de lungime ( ) ϕ d r ds se lungeşte cu ϕ d d s deci alungirea specifică a fibrei este ( ) ϕ ϕ ε d d d d r s s x. (8.84) Relaţia tensiuni-deformaţii specifice Utiliând legea lui Hooke se obţine expresia tensiunii normale (tangente la fibră) r E E x x ϕ ϕ ε σ d d. (8.85) Condiţii de echilibru Deoarece în secţiune nu există forţă axială suma forţelor axiale elementare este nulă 0 d d d d r E x ϕ ϕ σ de unde reultă d 0 r (8.86) relaţie cu ajutorul căreia se determină poiţia axei neutre. Suma momentelor forţelor axiale elementare faţă de axa N echilibreaă momentul încovoietor M prin urmare : r E M x d d d d ϕ ϕ σ r r E M d d d ϕ ϕ G E r r E E M ϕ ϕ ϕ ϕ ϕ ϕ d d d d d d d d + e E M ϕ ϕ d d.
180 80 REZISTENŢ MTERILELOR normale Înlocuind E dϕ dϕ M e în relaţia (8.85) se obţine expresia tensiunilor M σ x (8.87) e r Reultă că la bare curbe distribuţia tensiunilor normale pe înălţimea secţiunii este hiperbolică (fig. 8.9). În fibrele extreme tensiunile au valorile M d σ max e R M d σ min (8.88) e R Reolvând integrala (8.86) se determină valoarea raei r. În general se calculeaă excentricitatea I G e R r (8.89) R unde I G este momentul de inerţie al secţiunii faţă de axa care trece prin centrul de greutate paralelă cu axa neutră. La secţiunea dreptunghiulară b h h e. (8.90) R La secţiunea circulară de diametru d raa fibrei neutre este d r. (8.9) 4 R 4R d În caul când se consideră acţiunea simultană a forţei axiale tensiunea maximă se calculeaă cu formula N M d σ max +. (8.9) e R În general la elementele curbe solicitarea maximă apare în porţiunea situată spre centrul de curbură.
181 8. ÎNCOVOIERE BRELOR 8 Exemplul 8. Să se determine forţa maximă F cu care se poate încărca bara semicirculară de la Exemplul.4 (fig..) dacă R 04 m iar bara este din oţel cu σ a 00 MPa având: a) secţiune pătrată cu latura a 80 mm ; b) secţiune circulară cu diametrul d 80 mm. Reolvare Forţa maximă F se determină din condiţia σ max σ a. Tensiunea maximă se calculeaă cu formula (8.9) unde N N max 8 F şi M M max 0 68 F R (în secţiunea periculoasă la ϕ ). a) Dacă bara are secţiunea pătrată cu latura a 80 mm condiţia σ devine max σ a 8 F 0 68 F R d + σ a a a e R unde 4 I G a 80 e R r mm R a R 400 a R R mm a d e mm. Înlocuind valorile numerice reultă 8 F F de unde se obţine F 05 kn. b) Dacă bara are secţiunea circulară cu diametrul d 80 mm condiţia σ se scrie max σ a unde 4 8 F π d e R r R 4 R F R + π d e d 4R d d R σ a
182 8 REZISTENŢ MTERILELOR mm d d R R mm d e mm. de unde se obţine Înlocuind valorile numerice reultă 4 8 F F π 80 π F 8 9 kn. 00 Exemplul 8. Pentru bara din figura 8E. a să se calculee tensiunile normale în punctele B şi D ale secţiunii din încastrare. Bara este din oţel cornier cu aripi neegale LL (fig. 8E. b). Fig. 8E. Reolvare Pentru profilul LL în STS se găsesc momentele de inerţie ale secţiunii: 4 mm 4 I 8 0 I mm 4. Cu ajutorul relaţiei (7.9) cunoscând momentele de inerţie principale se poate calcula 4 mm 4 I σ plicând formula (8.0) se obţine ( 55) N mm ( 55) 6 9 ( 8 ) N σ mm B
183 8. ÎNCOVOIERE BRELOR 8 σ ( 8 ) N mm D. Exemplul 8.4 Să se verifice grinda repreentată în figura. e realiată din două profile I0 aşeate ca în figura 8E.4 dacă σ 40 MPa. Reolvare Din figura. e reultă a M 9 knm. max În nexa a pentru profilul I0 se găseşte momentul de inerţie I mm 4. Pentru secţiunea grinii momentul de inerţie va fi 4 mm 4 I I 4 0 iar W I mm. max 50 Înlocuind în formula de verificare (8.4 b) se obţine 6 M 9 0 ef W N σ 6 < σ a. mm Fig. 8E.4 Fig. 8E.5 Exemplul 8.5 Să se dimensionee bara din figura. a din oţel cu având secţiunea din figura 8E.5. σ 80 MPa a
184 84 REZISTENŢ MTERILELOR Reolvare Din figura. a reultă M max 50 Nm deci M max 50 0 W nec 5 0 mm. σ 80 a Se calculeaă poiţia centrului de greutate al secţiunii din figura 8E.5 faţă de axa : 6a 0 75a + a a G 065 a. 8a Momentul de inerţie faţă de axa G este ( 5 a) 4a a a I + 6a iar modulul de reistenţă axial al secţiunii 4 ( 0 5a) + + a ( 0 975a) 65a W I 58 a. 4 65a max 475a Egalând cele două expresii ale lui reultă a 07 mm deci se alege a mm. W adică 58 a 5 0 Exemplul 8.6 Bara în consolă din figura 8E.6 are lungimea m şi este solicitată la capătul liber de o forţă F kn înclinată cu unghiul α 0 0 faţă de verticală. Se cere tensiunea normală maximă şi punctul unde apare. Reolvare Secţiunea transversală se împarte în două dreptunghiuri ca în figura 8E.6 b. Se calculeaă poiţia centrului de greutate faţă de o axă care coincide cu latura din stânga Faţă de latura de sus se obţine G 8 68 mm G 868 mm. Se traseaă axele G şi G ca în figura 8E.6 b. Se calculeaă momentele de inerţie faţă de axele G şi G
185 8. ÎNCOVOIERE BRELOR 85 4 mm 4 I I mm 4 I maximă este Fig. 8E.6 Momentul încovoietor este maxim în încastrare M F Nmm. Componentele momentului încovoietor în lungul axelor sunt 0 6 M M cos Nmm 0 6 M M sin Nmm. Ecuaţia axei neutre (8.9) este 6 ( 89) ( 89) + I M + I M I M + I M Înclinarea axei neutre faţă de axa G (v.fig.8e.6 b) este β arctg Tensiunile normale (8.8) au expresia σ x În punctul cel mai îndepărtat de axa neutră ( 8 68; 7 ) σ 4 7 N / mm. P P tensiunea Exemplul 8.7 O bară în consolă cu secţiunea în Z (Fig. 8E.7 a) are lungimea m şi este solicitată la capătul liber de o forţă F kn înclinată la 0 0 faţă de verticală. Se cere tensiunea normală maximă şi punctul unde apare.

186 86 REZISTENŢ MTERILELOR Reolvare Secţiunea transversală se împarte în trei dreptunghiuri ca în figura 8E.7 b. Datorită antisimetriei centrul de greutate se află la mijlocul figurii. Se traseaă axele centrale neprincipale G şi G. Fig. 8E.7 Momentele de inerţie faţă de axele G şi G sunt 4 mm 4 I mm 4 I mm 4 I 5 0. maximă este În încastrare momentul încovoietor maxim este M F Nmm. Componentele momentului încovoietor în lungul axelor G şi G sunt 0 6 M M cos0 7 0 Nmm M M sin0 0 Nmm. Ecuaţia axei neutre (8.9) este 6 ( 5) ( ) ( 5) ( ) I M + I M 585. I M + I M Înclinarea axei neutre faţă de axa G (v.fig.8e.7 b) este 0 ( 585 ) β arctg. Tensiunile normale (8.8) au expresia σ x În punctul cel mai îndepărtat de axa neutră R ( 550) tensiunea normală σ R 8 N / mm. 0 6
187 9. STĂRI DE TENSIUNI ŞI DEFORMŢII SPECIFICE Într-un punct dintr-un corp elastic starea de tensiuni se poate defini prin tensiunile care acţioneaă pe trei suprafeţe (definite în trei plane) perpendiculare între ele care trec prin punctul considerat. Pe fiecare suprafaţă acţioneaă o tensiune normală şi o tensiune tangenţială repreentată prin cele două componente paralele cu muchiile comune. Datorită dualităţii tensiunilor tangenţiale acestea sunt egale două câte două deci starea de tensiuni dintr-un punct este definită de şase tensiuni trei normale şi trei tangenţiale. Întrucât tensiunea într-un punct depinde de orientarea suprafeţei pe care acţioneaă se studiaă variaţia tensiunilor cu rotirea în spaţiu a suprafeţei. Este posibil să se aleagă cele trei suprafeţe perpendiculare între ele astfel încât pe acestea să nu acţionee tensiuni tangenţiale. Tensiunile normale pe aceste suprafeţe au valori extreme una dintre ele fiind tensiunea normală maximă. Determinarea tensiunii maxime şi a orientării supafeţei pe care acţioneaă sunt probleme de primă importanţă în proiectare. Pe feţele unui octaedru egal înclinate faţă de direcţiile principale acţioneaă tensiuni normale şi tensiuni tangenţiale octaedrice. cestea din urmă sunt utiliate la stabilirea unei condiţii de reistenţă. Prin punctul considerat se pot alege alte trei suprafeţe perpendiculare între ele pe care tensiunile tangenţiale au valori extreme. ceste suprafeţe sunt înclinate la 45 0 faţă de cele pe care tensiunile normale au valori extreme. Starea de deformaţii specifice într-un punct se defineşte prin trei alungiri specifice şi trei lunecări specifice fiind dependentă de orientarea în spaţiu. În practică tensiunile nu pot fi determinate direct. Ele se calculeaă pe baa deformaţiilor specifice fie calculate fie măsurate de exemplu cu traductoare tensometrice reistive. Cunoscând alungirile specifice pe trei direcţii arbitrare se calculeaă alungirile specifice principale cu care se calculeaă tensiunile normale principale pe baa legii lui Hooke. Un ca aparte îl constituie materialele compoite care sunt aniotrope. La calculul compoitelor stratificate în care fibrele din fiecare lamină au orientări diferite se utilieaă relaţiile de calcul al tensiunilor şi alungirilor specifice faţă de axe rotite.
188 88 REZISTENŢ MTERILELOR 9. Starea tridimensională de tensiuni Se consideră un corp elastic în echilibru static sub acţiunea forţelor exterioare F F F (fig. 9. a). Dacă din interiorul corpului se detaşeaă un paralelipiped elementar de laturi dx d d pe fiecare faţă a acestui element de volum va acţiona o tensiune care poate fi descompusă în trei componente paralele cu axele Ox - o tensiune normală şi două tensiuni tangenţiale (fig. 9. b). a Fig. 9. b Starea tridimensională de tensiuni se caracterieaă prin trei tensiuni normale σ x σ σ şi şase tensiuni tangenţiale egale două câte două τ x τ x τ τ τ x τ x conform (.). Convenţiile de semne sunt preentate în paragraful.. În continuare se neglijeaă forţele distribuite în volum. 9.. Starea de tensiuni în jurul unui punct Dacă se cunosc tensiunile într-un punct al unui corp pe trei suprafeţe perpendiculare între ele se pot determina tensiunile pe orice suprafaţă orientată diferit faţă de acestea care trece prin punctul respectiv. Pentru aceasta în jurul punctului se ioleaă un tetraedru (fig. 9. a) a n lmn unde cărui faţă înclinată BCD este orientată prin versorul normalei ( ) l cos ( ni ) m cos ( n j) n cos nk ( ) iar i j k sunt versorii axelor Ox O O. sunt cosinuşii directori ai normalei
189 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 89 Se presupune că se cunosc tensiunile normale şi tensiunile tangenţiale pe cele trei feţe ale tetraedrului din planele de coordonate şi se cere determinarea tensiunii reultante p de componente p p p care acţioneaă pe faţa BCD. x Se scrie echilibrul forţelor care acţioneaă asupra tetraedrului OBCD. Dacă d este aria suprafeţei BCD atunci ariile suprafeţelor OCD ODB şi OBC au expresiile d x l d d m d d n d. (9.) Ecuaţia de proiecţii a forţelor pe axa Ox (fig. 9. b) se scrie p x x x x x d σ d + τ d + τ d (9.) sau înlocuind expresiile (9.) în ecuaţia (9.) p x σ l + τ m + τ n. (9. a) x x Din ecuaţiile de proiecţii pe axele O şi O reultă p x τ l + σ m + τ n (9. b) x p τ l + τ m + σ n. (9. c) x Fig. 9. Relaţiile (9.) definesc tensiunea reultantă pe suprafaţa d. La limită când laturile tetraedrului tind spre ero suprafaţa d conţine punctul O deci se poate considera că relaţiile (9.) dau componentele tensiunilor pe un plan înclinat care trece de fapt prin punctul O. Ecuaţiile de momente conduc la relaţiile de dualitate a tensiunilor tangenţiale (.).
190 90 REZISTENŢ MTERILELOR Relaţiile (9.) se pot scrie matriceal sub forma unde matricea tensiunilor {} p [ T ]{} n { T }. (9.4) σ σ τ τ x x x σ x σ τ iar { p } { p p p } T şi {} { l m n} T x x τ τ τ σ n. Se descompune tensiunea p în componenta normală σ n şi cea tangenţială τ n. Tensiunea normală σ n este egală cu proiecţia lui p pe direcţia versorului n T {}{} p n p l + p m + p n σ p n. (9.5) n Din relaţia (9.4) se obţine prin transpunere T T {} p {}[ n T ] T T {} n [ ] x σ T σ (9.6) unde s-a utiliat proprietatea de simetrie a matricei tensiunilor [ T ] al dualităţii tensiunilor tangenţiale. Înlocuind expresia (9.6) în relaţia (9.5) se obţine tensiunea normală σ n σ x T {} n [ T ]{} n l + σ σ m + σ n + τ x l m + τ m n + τ x σ n l. reultat direct (9.7) Tensiunea tangenţială τ n este egală cu proiecţia lui p pe planul secţiunii înclinate τ p n. n Dar produsului vectorial p n i p l p j m k p n ( p n p m) i + ( p l p n) j + ( p m p l) k x deci valoarea absolută a tensiunii tangenţiale este n [( p n p m) ( ) ( ) ] + p l p n + p m p l x x τ. (9.8) x x
191 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 9 τ n se modifică. Dacă orientarea planului BCD se schimbă atunci valorile tensiunilor σ n şi 9.. Tensiuni principale Într-o analiă de tensiuni intereseaă valorile extreme ale lui σ n şi orientarea suprafeţelor pe care acţioneaă acestea. Problema de extrem condiţionat are constrângerea geometrică l + m + n. (9.9) Se introduce multiplicatorul lui Lagrange λ şi se calculeaă valorile extreme ale funcţiei F ( lmn) λ ( l + m + n ) σ. (9.0) Condiţiile ca F să aibă valori extreme F l 0 F m 0 F n 0 conduc la sistemul de ecuaţii algebrice omogene ( λ) l + τ m + τ n 0 σ x x x ( σ λ) m + τ 0 τ l + n (9.) x ( σ λ) 0 τ l + τ m + n. x cesta are forma problemei de valori proprii a matricei tensiunilor [ T ]{} n λ {} n σ. (9.) Pentru a avea soluţii nebanale determinantul coeficienţilor necunoscutelor l mn trebuie să se anulee σ λ x τ τ x x τ σ λ τ x τ τ σ λ x 0. (9.) Ecuaţia caracteristică (9.) are forma unde coeficienţii au expresiile J J σ x + σ + σ σ x σ + σ σ + σ σ x τ x τ τ x λ J λ + J λ J 0 (9.4) (9.5) x [ T ] J σ σ σ σ τ σ τ σ τ + τ τ τ det. x x x x x σ
192 9 REZISTENŢ MTERILELOR Soluţiile ecuaţiei (9.4) se numesc tensiuni normale principale şi se noteaă σ σ σ ordonate descrescător. Ele sunt valorile proprii ale matricei T. Lor le corespund direcţiile principale tensiunilor [ ] σ { } { l m n } T n soluţiile ecuaţiilor (9.) în care s-a înlocuit i i [ T ]{ n i } σ { n } σ i i i i λ σi şi care repreintă vectorii proprii ai matricei [ T σ ]. i (9.6) i (9.7) Direcţiile principale ale tensiunilor normale definesc orientarea normalelor la suprafeţele pe care tensiunile normale au valori extreme. Pe aceste suprafeţe nu acţioneaă tensiuni tangenţiale. deci Într-adevăr dacă τ 0 atunci p λ n p σ l + τ m + τ n λ l n {} p λ {} n x (9.8) Înlocuind expresia (9.7) în relaţia (9.4) reultă ecuaţia (9.). Direcţiile principale sunt perpendiculare între ele ceea ce se demonstreaă pe baa ortogonalităţii vectorilor proprii ai matricei tensiunilor. Reultă că dacă se ioleaă dintr-un corp elastic un element de volum paralelipipedic având muchiile paralele cu direcţiile principale ale tensiunilor normale atunci pe feţele elementului acţioneaă numai tensiuni normale de valori σ σ σ. x x x 9.. Calculul faţă de direcţiile principale Dacă axele de coordonate se aleg în lungul direcţiilor principale ale tensiunilor normale (fig. 9. a) şi se ioleaă un tetraedru în jurul originii acestor axe atunci pe o suprafaţă înclinată cu normala definită de cosinuşii directori l m n componentele tensiunii reultante sunt p p x σ l σ m σ n. (9.9) Tensiunea normală pe această suprafaţă este l + σ m σ n p σ σ +. (9.0) Tensiunea tangenţială se calculeaă din relaţia τ p p σ σ l + σ m + σ n ( σ l + σ m + σ n ). (9.a)
193 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 9 După transformări ţinând cont de relaţia (9.9) se obţine [( σ σ ) l m + ( σ σ ) m n + ( σ σ ) n ] τ. (9.b) l Din relaţia (9.b) reultă că atunci când σ σ σ tensiunile tangenţiale sunt nule indiferent de orientarea suprafeţei. Înlocuind cosinuşii directori din relaţiile (9.9) în (9.9) se obţine p σ x p + σ p + σ. (9.) Ecuaţia (9.) defineşte elipsoidul tensiunilor ale cărui semiaxe sunt tensiunile principale. ceastă înterpretare geometrică atestă faptul că tensiunile principale sunt valorile extreme ale tensiunilor normale. Matricea tensiunilor este în acest ca iar ecuaţia (9.4) devine deci σ T σ σ σ { } ( λ)( σ λ)( σ λ) 0 σ (9.) J σ + σ + σ σ σ + σ σ + σ σ J (9.4) J. σ σ σ Mărimile J J J au aceleaşi valori independent de axele de coordonate faţă de care se defineşte starea de tensiuni. De exemplu J σ + σ + σ σ x + σ + σ. Ca urmare J J J se numesc invarianţi ai tensiunilor Tensiuni tangenţiale octaedrale Un interes aparte îl preintă tensiunile pe feţele unui octaedru construit faţă de direcţiile principale (fig. 9. b). Planele octaedrale sunt cele opt feţe ale căror normale fac unghiuri egale cu axele de coordonate. Cosinuşii directori ai feţelor unui octaedru satisfac relaţiile
194 94 REZISTENŢ MTERILELOR l oct moct noct (9.5) deci normalele fac unghiuri de cu direcţiile principale. Înlocuind aceste valori în expresia (9. b) se obţine formula tensiunii tangenţiale octaedrale τ [( σ σ ) + ( σ σ ) + ( σ σ ) ] oct (9.6 a) Din ecuaţia (9.0) reultă tensiunea normală octaedrală σ + ( σ + σ σ ) care este egală cu tensiunea medie. oct (9.7) a Fig. 9. b Faţă de axe de coordonate oarecare tensiunea tangenţială octaedrală are expresia τ [( ) ( ) ( ) 6( )] oct σ x σ + σ σ + σ σ x + τ x + τ + τ x. (9.6 b) 9..5 Tensiuni tangenţiale extreme Ca şi în caul tensiunilor normale intereseaă valorile extreme ale tensiunilor tangenţiale şi orientarea suprafeţelor pe care acestea acţioneaă. Problema de extrem condiţionat se reolvă prin metoda multiplicatorului lui Lagrange. Se construieşte funcţia
195 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 95 F ( lmn) λ ( l + m + n ) τ. (9.8) şi se scriu condiţiile ca F să aibă valori extreme: F l 0 F m 0 F n 0. Se obţine sistemul de ecuaţii algebrice ( σ ) l m + ( σ σ ) l n λ l 0 σ ( σ ) mn + ( σ σ ) ml λ m 0 σ (9.9) ( σ ) nl + ( σ σ ) nm λ n 0 σ. Soluţiile nebanale sunt l 0 m 0 n 0 m n n l l m ( ) σ σ λ ( ) σ σ λ (9.0) ( ) σ σ λ. Înlocuind aceşti cosinuşi directori pe rând în relaţia (9. b) se obţin tensiunile tangenţiale extreme σ σ τ τ σ σ σ σ τ. (9.) Deoarece σ > σ > σ tensiunea tangenţială maximă este τ τ max. Din valorile cosinuşilor directori (9.0) reultă că tensiunile tangenţiale au valori extreme pe planele bisectoare ale planelor definite de direcţiile principale ale tensiunilor normale. Desigur pe aceste plane tensiunile normale nu sunt nule. 9. Starea plană de tensiuni În caul stării plane de tensiuni se consideră tensiuni paralele numai cu două dintre axele de coordonate independente de una din coordonate (fig. 9.4 a) deci σ τ x τ şi forţele volumice pe direcţia se presupun neglijabile sau nule. Exemple sunt stările de tensiuni într-un vas cu pereţi subţiri solicitat la presiune interioară sau într-o placă plană subţire solicitată de forţe coplanare uniform distribuite pe grosime.
196 96 REZISTENŢ MTERILELOR 9.. Starea de tensiuni în jurul unui punct Se consideră un element de volum prismatic cu baa triunghiulară situată în planul xo (fig. 9.4 b) şi cu grosimea egală cu unitatea. Se presupun cunoscute tensiunile σ x σ τ x τ x pe feţele din planele de coordonate şi se cere calculul tensiunilor σ α şi τ α pe faţa BD înclinată cu unghiul α. De notat că unghiul α este poitiv în sensul orar în timp ce rotirile în planul Ox sunt poitive în sens contrar. a Fig. 9.4 b Se noteaă cu aria suprafeţei BD deci suprafaţa OB are aria suprafaţa OD are aria cosα. sinα iar Se scriu ecuaţiile de proiecţii ale forţelor pe direcţia lui σ α şi a lui τ α : σ α τ α σ x cos α σ sin α τ x sinα cosα 0 ( cos α sin α ) 0 σ x cosα sinα + σ sinα cosα + τ x. Ecuaţia de echilibru a momentelor faţă de mijlocul feţei BD conduce la relaţia (.): τ τ. x Se obţine σ α x x + σ cos α + σ sin α τ sinα cosα (9. a) ( σ σ ) sinα cosα τ ( cos α sin α ) τ α x şi înlocuind unghiul α cu σ α + 90 o x x (9. b) 0 α + 90 σ x sin α + σ cos α τ Relaţiile (9.) se mai scriu x sinα cosα. (9. c)
197 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 97 σ x + σ σ x σ σ α + cosα + τ x sinα (9. a) σ x σ τ α sinα τ x cosα. (9. c) 9.. Tensiuni principale Valorile extreme ale tensiunii normale acesteia în raport cu unghiul α : σ α se obţin anulând derivata Reultă dσ d α ( α ) σ x σ sinα + τ x cosα τ 0. (9.4) α τ x tg α (9.5) σ σ relaţie care defineşte direcţiile principale ale tensiunilor normale. x Din relaţia (9.4) se observă că pe feţele care au ca normale direcţiile principale tensiunile tangenţiale sunt nule. Pentru 0 α π între cele două soluţii α şi α există relaţia α α + π α α + π deci direcţiile principale sunt perpendiculare între ele. Înlocuind valorile unghiului α date de relaţia (9.5) în expresia (9.) se obţin tensiunile principale σ x + σ σ ± ( σ x σ ) + 4τ x. (9.6) Se observă că invarianţii tensiunilor sunt în acest ca J J σ + σ σ + σ const. (9.7) x x x σ σ σ σ τ const. (9.8) 9.. Tensiuni tangenţiale extreme Valorile extreme ale tensiunii tangenţiale τ α se obţin din condiţia
 σ x σ tg α'. (9.")
 9..4 Cauri particulare ale stării plane de tensiuni Starea uniaxială de tensiuni este preentată în paragraful 5.")
198 98 REZISTENŢ MTERILELOR care se mai scrie d d τ α ( α ) σ x σ cosα τ x sin α 0 (9.9) σ x σ tg α'. (9.40) τ tg α x Reultă α ' α ± π deci α ' α + π 4 astfel că tensiunile tangenţiale extreme apar în secţiuni înclinate cu 45 0 faţă de direcţiile principale şi au valorile σ σ τ ± ( σ x σ ) + 4τ x ±. (9.4) 9..4 Cauri particulare ale stării plane de tensiuni Starea uniaxială de tensiuni este preentată în paragraful 5.5. Într-o bară solicitată la întindere sau compresiune apar tensiuni tangenţiale maxime în secţiuni înclinate la 45 0 faţă de axa barei ceea ce explică orientarea suprafeţelor de rupere la unele materiale fragile. Starea de forfecare pură Se consideră un element solicitat la forfecare pură ca în figura 9.5 a. Pe feţele elementului acţioneaă numai tensiuni tangenţiale. a b c Fig. 9.5 Reultă că pe o suprafaţă înclinată cu unghiul α σ τ α α τ τ x sinα x cosα. (9.4) Deoarece tg α α Pe feţele unui element orientate la 45 0 faţă de primul acţioneaă numai tensiunile normale σ ± (fig. 9.5 b). τ x
199 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 99 O aplicaţie a acestui reultat se întâlneşte la măsurarea tensiunilor tangenţiale în arbori solicitaţi la răsucire (fig. 9.5 c). Un element de volum din vecinătatea suprafeţei arborelui este solicitat la forfecare pură (v. Cap. 6) dacă laturile sale sunt paralele cu generatoarele respectiv perpendiculare pe acestea. Un element rotit cu 45 0 este solicitat de tensiuni normale principale egale în mărime cu tensiunile tangenţiale produse de răsucire pe feţele primului element. Se înlocuieşte măsurarea lui τ cu măsurarea lui σ la 45 0 faţă de axa barei ceea ce se realieaă uşor cu ajutorul traductoarelor tensometrice reistive. Bara solicitată la încovoiere În caul barelor solicitate la încovoiere (fig. 9.6 a) σ 0 deci relaţiile (9.5) şi (9.6) devin unde τ x tg α (9.4) σ x σ x σ ± σ x + 4τ x (9.44) M T S σ x τ x τ x () I b I. a Fig. 9.6 b La 0 σ 0 la forfecare pură. x O ± 45 α σ ± τ x deci elementul este solicitat
200 00 REZISTENŢ MTERILELOR o o 90 La ± h τ x 0 α 0 σ 0σ x deci direcţiile principale corespund cu direcţiile axelor de coordonate. Dacă se parcurge secţiunea transversală în lungul axei O în sens poitiv direcţiile principale se rotesc continuu (fig. 9.6 a) în sens contrar acelor de ceas. Determinând în mai multe puncte orientarea direcţiilor principale (fig. 9.6 b) se pot trasa liniile iostatice care repreintă înfăşurătoarele tensiunilor normale principale formând o dublă reţea de curbe ortogonale. La armarea grinilor din beton se urmăreşte ca armăturile din oţel să fie orientate aproximativ pe direcţia liniilor iostatice. σ x 9..5 Cercul lui Mohr pentru tensiuni Relaţiile (9.) şi (9.) se pot scrie sub forma σ x + σ σ x σ σ cosα + τ x sinα σ x σ τ sinα + τ x cosα. Ridicând la pătrat şi adunând ecuaţiile se obţine x σ σ x σ + τ τ x σ + σ +. (9.45) ceasta este ecuaţia unui cerc (fig. 9.7) denumit cercul lui Mohr de raă σ σ + τ al cărui centru are coordonatele x + σ x 0. Pe cerc unghiurile se măsoară în aceeaşi direcţie în care se măsoară unghiul α în figura 9.4 (sens orar). Unghiul α pe cerc corespunde unui unghi α pe element. Punctele de pe cercul lui Mohr definesc stări de tensiuni pe feţele elementului din figura 9.4. Punctul P are coordonatele σ x şi τ x egale cu tensiunile pe faţa OD. Punctul diametral opus Q defineşte tensiunile pe faţa OB perpendiculară pe OD σ şi τ x. Punctele P' şi Q' definesc tensiunile pe feţele rotite cu unghiul α faţă de axele de coordonate. Punctele P şi Q în care cercul intersecteaă axa oriontală au abscise egale cu tensiunile principale σ şi σ. Unghiul α al raei CP cu axa absciselor corespunde direcţiei principale α deci înclinării normalei la faţa pe care acţioneaă σ.
201 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 0 Se observă că ordonata punctului Q este negativă. Pentru studiul stării plane de tensiuni cu ajutorul cercului lui Mohr este necesară o convenţie de semne modificată diferită de cea adoptată în Capitolul. Tensiunile tangenţiale care tind să producă o rotaţie în sens orar se consideră poitive iar cele care tind să producă o rotaţie în sens antiorar se consideră negative (sunt repreentate de puncte situate sub axa absciselor). Fig. 9.7 Cercul lui Mohr se construieşte pornind de la tensiunile σ x σ τ x care definesc punctele P şi Q. Centrul cercului C se află la intersecţia diametrului PQ cu axa absciselor. Se traseaă cercul de raă CP care intersecteaă axa oriontală în punctele P şi Q de abscise σ şi σ. 9. Ecuaţii diferenţiale de echilibru Fie un element de laturi dx d şi grosime egală cu (fig. 9.8) detaşat dintrun corp elastic solicitat mecanic. Se presupune că tensiunile σ x σ τ x τ x şi sarcinile volumice X Y sunt funcţii doar de x şi (independente de ) iar Z 0 (stare plană de tensiuni). Variaţia tensiunilor cu poiţia se poate exprima printr-o devoltare în serie Talor trunchiată. Dacă pe faţa din stânga acţioneaă σ x atunci pe faţa din x dreapta situată la distanţa dx acţioneaă σ x + σ dx. x
202 0 REZISTENŢ MTERILELOR Ecuaţia de echilibru a forţelor pe direcţia x se scrie σ τ x x σ d d d d x + x σ x + τ x + dx τ x dx + X dxd 0. x După simplificări se obţine σ x τ x + + X 0. (9.46) x Similar din ecuaţia de echilibru pe direcţia reultă τ x σ + + Y 0. (9.47) x Ecuaţiile diferenţiale de echilibru (9.46) şi (9.47) se mai numesc ecuaţiile lui Cauch. Fig. 9.8 Ecuaţia de momente faţă de centrul elementului conduce la relaţia de dualitate a tensiunilor tangenţiale (.). În caul stării de tensiuni tridimensionale ecuaţiile diferenţiale de echilibru se scriu σ τ x x τ x X 0 x τ x x σ + τ + + Y 0 (9.48) τ τ x σ Z 0 x la care se adaugă cele trei relaţii de dualitate a tensiunilor tangenţiale (.). Cele şase ecuaţii conţin nouă necunoscute deci problemele de analiă a tensiunilor sunt static nedeterminate interior. În caul unui element situat în vecinătatea suprafeţei unui corp elastic ecuaţiile de echilibru care se stabilesc între forţele de suprafaţă şi tensiunile interioare repreintă condiţiile la limită. cestea sunt chiar ecuaţiile (9.) care
203 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 0 exprimă echilibrul forţelor care acţioneaă asupra tetraedrului din figura 9. dacă faţa înclinată BCD este pe suprafaţa corpului iar tensiunea reultantă p este o sarcină pe unitatea de suprafaţă. 9.4 Starea plană de deformaţii specifice În continuare studiul deformaţiilor specifice se face în planul xo considerând că alungirea specifică ε şi lunecările specifice γ x γ sunt nule. Trebuie remarcat că starea plană de deformaţii specifice este asociată cu un sistem de tensiuni tridimensional după cum starea plană de tensiuni este legată de un sistem tridimensional de deformaţii specifice. Starea plană de deformaţii specifice se realieaă de exemplu într-un corp prismatic în care în orice plan perpendicular pe axa longitudinală O apar aceleaşi deformaţii. ceasta presupune însă σ 0. Scopul principal este determinarea alungirilor specifice şi a lunecării specifice pe direcţiile normală şi tangenţială la un plan înclinat faţă de axele de coordonate în funcţie de alungirile specifice ε x ε şi lunecarea specifică γ x raportate la planele de coordonate. Fig. 9.9 Se consideră segmentul B de lungime ds într-un corp elastic nedeformat (fig. 9.9). După deformare B se deplaseaă în 'B'. Deplasările lui sunt u şi v
204 04 REZISTENŢ MTERILELOR iar deplasările lui B sunt u + du şi v + dv. Variaţia deplasărilor cu poiţia punctului considerat se exprimă sub forma u u v v du dx + d dv dx + d. (9.49) x x Se alege un sistem de axe local x'' cu axa x' în lungul lui B şi se calculeaă componentele deformaţiilor specifice faţă de acest sistem rotit cu unghiul θ faţă de sistemul iniţial. Se traseaă ' B" B paralel cu axa x' şi se prelungeşte până în C' la intersecţia cu B'D perpendiculară pe x'. În noul sistem de axe deplasările lui sunt u' şi v' iar deplasările lui B sunt u ' + du' şi v ' + dv' lungirile specifice lungirea pe direcţia x' este B " C' du' B"D' cosθ + B'D' sinθ du cosθ + dv sinθ. Împărţind la ds se obţine alungirea specifică ε x' du' du dv cosθ + sinθ. ds ds ds Înlocuind în relaţia de mai sus expresiile (9.49) se obţine apoi înlocuind u dx u d v ε x' + cosθ + x ds ds x dx d cos θ şi sin θ reultă ds ds ε x' dx ds v d + sinθ ds u u v v cosθ sinθ cosθ cosθ sinθ sinθ. x x este sau lungirea specifică în lungul direcţiei înclinate cu unghiul θ faţă de Ox ε ε x ' x + ε cos θ + ε sin θ γ sinθ cosθ (9.50 a) x ε x + ε ε x ε γ x + cosθ sinθ. (9.5 a) x ' + lungirea specifică ε ' se obţine înlocuind θ prin θ + π ε ' ε sin θ + ε cos θ γ sinθ cosθ. (9.50 b) x x
205 9. STĂRI DE TENSIUNI ŞI DEFORMŢII Lunecarea specifică Pentru calculul lunecării specifice γ se determină unghiul α cu care x' ' elementul B s-a rotit faţă de poiţia iniţială (axa Ox') Deoarece împărţind la ds se obţine B' C dv' α tg α. ds dv ' dv cosθ du sinθ dv' dv α cosθ ds ds dx apoi înlocuind expresiile (9.49) şi cos θ ds sau du ds sinθ d sin θ reultă ds v v u u α cosθ sinθ cosθ cosθ sinθ sinθ x x ( ε ε ) sinθ cosθ u α v cos θ sin θ + x. x nalog se calculeaă rotirea α ' a unui segment perpendicular pe B ( ε ε ) sinθ cosθ u v α' cos θ sin θ + x. x Lunecarea specifică este deci sau ( cos θ sin θ ) + ( ε ε ) sinθ cosθ γ x ' ' α α' γ x x (9.50 c) ( ε ε ) sinθ γ cos θ γ. (9.5 b)) x ' ' x + x 9.4. lungiri specifice principale Comparând relaţiile (9.50) şi (9.5) cu (9.) şi (9.) se observă că au aceeaşi formă primele putând fi obţinute din ultimele două înlocuind σ cu ε şi τ cu γ.
206 06 REZISTENŢ MTERILELOR ceste înlocuiri se pot face în toate relaţiile analoage. stfel direcţiile principale ale deformaţiilor specifice (în lungul cărora γ 0) se calculeaă din x x' ' γ x tg θ. (9.5) ε ε Deformaţiile specifice principale sunt ε x + ε ε ± ( ε x ε ) + γ x. (9.5) Lunecările specifice maxime apar în plane înclinate la 45 0 faţă de planele principale şi au valorile γ ( ε ε ) + γ ± ( ε ) max ± x ε x. (9.54) Roeta tensometrică Pentru determinarea completă a deformaţiilor specifice într-un punct de pe suprafaţa unei piese este necesară măsurarea alungirilor specifice pe trei direcţii concurente în punctul respectiv. ceasta se realieaă cu ajutorul unei roete formate din trei traductoare tensometrice reistive care se lipeşte pe piesa studiată. Este convenabil ca unghiurile dintre direcţiile traductoarelor să fie 45 0 sau Fie ε a ε b Dacă unghiul între a (9.50) se obţine ε c alungirile specifice măsurate cu roeta de 45 0 (fig. 9.0). ε şi alungirea specifică principală ε este θ atunci din relaţia ε + ε ε ε ε + cosθ a o ( + ) ε + ε ε ε ε + cos θ 45 b (9.55) o ( + ) ε + ε ε ε ε + cos θ 90 c. Calculând ε a ε b şi b ε c a ε b ε b ε c se elimină unghiul θ reultând alungirile specifice principale în funcţie de alungirile specifice măsurate ε ε apoi ( ε ) şi ( ) ε + ε ( ε ε ) + ( ε ). (9.56) a c ± a b b ε c Unghiul θ se determină din relaţia

207 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 07 ε a ε b + ε c tg θ. (9.57) ε ε a Valorile calculate cu relaţiile (9.56) se utilieaă apoi pentru calculul tensiunilor principale. c Fig. 9.0 Fig Legea lui Hooke generaliată Fie un element de volum paralelipipedic având muchiile paralele cu direcţiile principale ale tensiunilor normale pe feţele căruia acţioneaă tensiunile principale σ σ σ (fig. 9.). σ Tensiunea σ produce alungirile specifice ε pe direcţia Ox şi E σ σ alungirile specifice ε ν ε ν pe direcţiile O respectiv O. E E σ σ nalog tensiunea σ produce alungirile specifice ε ν ε E E σ σ ε ν iar tensiunea σ produce alungirile specifice ε ν E E σ σ ε ν ε. E E plicând principiul suprapunerii efectelor alungirile specifice totale pe cele trei direcţii se calculeaă însumând cele trei componente
208 08 REZISTENŢ MTERILELOR ε ε + ε + ε [ σ ν ( σ + σ )] E ε ε + ε + ε [ σ ν ( σ + σ ) ] (9.58) E ε ε + ε + ε [ σ ν ( σ + σ )] E unde E este modulul de elasticitate longitudinal iar ν este coeficientul de contracţie transversală. Relaţiile (9.58) repreintă legea lui Hooke generaliată raportată la direcţiile principale. Legea lui Hooke generaliată faţă de axe oarecare se scrie sub forma τ x γ x G [ σ ν ( σ σ )] ε x x + E [ σ ν ( σ σ )] ε + x (9.59 a) E [ σ ν ( σ σ )] ε x + E τ γ G unde G este modulul de elasticitate transversal. τ x γ x (9.59 b) G Se demonstreaă că între constantele elastice E G şi ν există relaţia E G. (9.60) ( +ν ) Dacă în relaţiile (9.59 a) se exprimă tensiunile în funcţie de alungirile specifice se obţine unde σ σ σ x G ε G ε G ε x + λ e + λ e + λ e ( σ + σ σ ) ν e ε x + ε + ε x + E λ ν E ( + ν )( ν ) (9.6) (9.6 a). (9.6)
209 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 09 Modulul de elasticitate transversal G şi constanta λ se numesc constantele lui Lamé. În caul stării plane de tensiuni înlocuind σ 0 în relaţiile (9.58) reultă ε ( σ ν σ ) ε ( σ ν σ ) ε ( σ + ) E E ν. E σ Exprimând tensiunile principale în funcţie de deformaţiile specifice principale reultă E σ + ν ( ε ν ε ) σ ( ε + ν ε ) E ν. (9.64) Deoarece ε 0 reultă că starea plană de tensiuni produce o stare tridimensională de deformaţii specifice. 9.6 Ecuaţia lui Poisson Elementul din figura 9. are volumul d V dx d d. În urma deformării corpului volumul devine ( + ε ) d ( + ε ) d ( ε ) d V + dv dx +. Neglijând produsele a două sau trei deformaţii specifice în raport cu acestea se obţine V + dv dx d d ( + ε x + ε + ε ) deci d V dv ( ε + ε + ε ). d. Deformaţia volumică specifică (9.6 a) este dv e d V ε x x + ε x + ε. Înlocuind deformaţiile specifice prin expresiile (9.59 a) reultă unde tensiunea medie ( ) ( ν ) σ + σ + σ e ν x σ m. (9.6 b) E E m ( σ + σ σ ) σ + x. (9.65)
210 0 REZISTENŢ MTERILELOR Relaţia (9.6 b) se mai scrie sub forma şi se numeşte ecuaţia lui Poisson. E σ m e K e ( ν ) Constanta de proporţionalitate între volumic al materialului Se mai stabilesc egalităţile ( ν ) (9.66) σ m şi e este modulul de elasticitate E K. (9.67 a) G ( + ν ) ( ν ) K λ + G. (9.67 b) Din relaţia (9.6 b) reultă că la materialele incompresibile pentru care e 0 coeficientul lui Poisson este ν 0 5. La cauciucul butil ν În caul unui element cubic supus la presiune "hidrostatică" p starea de tensiuni este descrisă de σ σ σ p τ τ τ 0 σ p x x x p e deci contracţia unităţii de volum este proporţională cu presiunea şi invers K proporţională cu K. m 9.7 Energia potenţială de deformaţie la încovoiere La elementul infiniteimal din figura 9. pe direcţia axei Ox acţioneaă forţa σ d d. Când aceasta creşte de la ero la valoarea nominală produce o deformaţie ε dx deci produce lucrul mecanic elementar ( σ d d)( ε dx) care este egal cu energia potenţială de deformaţie acumulată de element du σ ε dv. Reultă că energia acumulată în unitatea de volum este U 0 σ ε. Ţinând seama şi de acţiunea celorlalte tensiuni σ şi σ se obţine
211 9. STĂRI DE TENSIUNI ŞI DEFORMŢII ( ) 0 ε σ ε σ ε σ + + U sau utiliând legea lui Hooke generaliată (9.58) reultă energia de deformaţie specifică totală ( ) ( ) 0 σ σ σ σ σ σ ν σ σ σ E E U. (9.68) Faţă de axe oarecare ( ) ( ) ( ) 0 x x x x x G E E U τ τ τ σ σ σ σ σ σ ν σ σ σ Energia specifică de variaţie a volumului Dacă elementul de volum este solicitat pe toate feţele de aceeaşi tensiune deformaţia are loc numai prin variaţia volumului. stfel aplicând pe toate feţele tensiunea medie (9.65) ( ) σ σ σ σ + + m se produce o deformaţie volumică specifică e iar energia specifică de variaţie a volumului este ( ) ( ) ( )( ) 9 0 σ σ σ ν σ ν σ ν σ σ + + E E E e U m m m m v deci ( ) 0 6 σ σ σ ν + + E U v (9.69) sau ( ) 0 8 x m m m v K K U σ σ σ σ ε σ + +. (9.70) Energia specifică de variaţie a formei Diferenţa între energia specifică totală 0 U şi cea de variaţie a volumului v U 0 repreintă energia specifică de variaţie a formei
212 REZISTENŢ MTERILELOR U 0 f U 0 U 0v E ν 6 E ν ( σ + σ + σ ) ( σ σ + σ σ + σ σ ) ( σ + σ + σ ) E sau [( σ σ ) + ( σ σ ) + ( σ ) ] + ν U 0 f σ. (9.7) 6 E U Faţă de axe oarecare + ν E [( σ σ ) + ( σ σ ) + ( σ σ ) + 6 ( τ + τ + τ )] 0 f x x x x În funcţie de tensiunea tangenţială octaedrică (9.6) energia specifică de variaţie a formei se scrie U 0 f ( + ν ) τ oct τ oct (9.7) E 4G În caul solicitării de întindere simplă înlocuind σ σ 0 şi σ σ x în relaţia (9.7) se obţine U 0 f e + ν σ x σ x (9.7) E 6G. 9.8 Compoite armate cu fibre Un compoit stratificat numit pe scurt stratificat este realiat din straturi cu fibre sau textură înglobate într-o matrice numite lamine. Lamina cu fibre unidirecţionale are proprietăţi longitudinale (în lungul fibrelor) superioare celor transversale. Din acest motiv laminele sunt combinate în diferite orientări pentru a obţine proprietăţile generale dorite. În continuare se consideră doar stratificate simetrice faţă de planul median. Pentru caul nesimetric se pot consulta tratate de specialitate [5 64 ] Lamina ortotropă Se consideră o lamină cu fibre unidirecţionale solicitată la o stare plană de tensiuni. Se aleg două sisteme de coordonate unul local - ataşat de lamină şi unul
213 9. STĂRI DE TENSIUNI ŞI DEFORMŢII global - ataşat de stratificat. Sistemul de axe local are axa Ox în lungul fibrelor şi axa O în planul laminei perpendiculară pe fibre. Sistemul de axe global are axele OX şi OY în planul median al stratificatului simetric. Lamina este aniotropă. În general pentru a descrie complet un material aniotrop solicitat la o stare triaxială de tensiuni relaţia între tensiuni şi deformaţii specifice se exprimă printr-o matrice simetrică de dimensiuni 6 6 în care apar constante elastice independente. Pentru un material ortotrop solicitat triaxial sunt necesare 9 constante elastice independente. Pentru un material ortotrop solicitat la o stare biaxială de tensiuni legea lui Hooke conţine 4 constante elastice independente Lamina cu ortotropie axată Pentru o lamină cu fibrele orientate în direcţia globală OX (fig. 9. a) relaţiile între deformaţii specifice şi tensiuni sunt unde ε X E x şi σ X σ Y ν x E E x ε Y σ Y σ X ν x E E x τ XY γ XY (9.74) G E sunt modulele de elasticitate longitudinale în direcţiile x şi este modulul de elasticitate transversal în planul xo ν x şi ν x sunt coeficienţii de contracţie transversală ( ν x defineşte contracţia pe direcţia produsă de alungirea pe direcţia x). sau Relaţiile (9.74) se mai scriu matriceal sub forma ε ε γ X Y XY Ex ν x E 0 x ν x E 0 {} ε []{} S σ E 0 0 G x σ σ τ X Y XY x (9.75) (9.76) unde [] S se numeşte matricea de flexibilitate a laminei sau matricea complianţelor. Prin particulariare de la caul triaxial matricea [ S ] se mai scrie S S S6 S S S S6 (9.77) S6 S6 S66 [] unde elementele se determină prin identificare cu matricea din ecuaţia (9.75). Gx
214 4 REZISTENŢ MTERILELOR Dacă se exprimă tensiunile în funcţie de deformaţiile specifice ecuaţiile (9.7) devin sau x x ( ε ν ε ) σ Ex X X x Y ν ν + σ E Y ( εy ν x ε X ) ν ν + (9.78) x x τ. XY Gx γ XY În formă matriceală relaţiile (9.78) se scriu σ σ τ X Y XY Ex ν xν ν x E ν xν 0 x x ν x ν E ν E x x 0 {} σ [ C]{} ε unde [ C ] se numeşte matricea de rigiditate a laminei. Matricea simetrică [ C ] se mai scrie [ ] x ν ν x x G 0 0 x ε ε γ X Y XY (9.79) (9.80) C C C6 C C C C6 (9.8) C6 C6 C66 iar elementele se determină prin identificare cu matricea din ecuaţia (9.79) Matricea de rigiditate este inversa matricei de flexibilitate [ ] [ S] C. (9.8) Lamina cu ortotropie deaxată Pentru o lamină cu fibrele orientate într-o direcţie care face unghiul θ cu direcţia globală OX (fig. 9. b) tensiunile şi deformaţiile specifice definite în sistemul de coordonate al stratificatului trebuie exprimate în funcţie de tensiunile şi deformaţiile specifice în sistemul de coordonate al laminei faţă de care se definesc
215 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 5 caracteristicile elastice. Pentru aceasta se utilieaă relaţiile de transformare a tensiunilor (9.) scrise pentru planul xo şi relaţiile de transformare a deformaţiilor specifice (9.50). a b Fig. 9. Pentru calculul rigidităţilor faţă de direcţiile globale se procedeaă astfel:. Se determină deformaţiile specifice în direcţiile locale în funcţie de deformaţiile specifice în direcţiile globale. Relaţiile (9.50) se scriu matriceal sub forma XY Y X x x s c s c s c s c c s s c s c γ ε ε γ ε ε (9.8) unde s-a notat θ cos c şi θ sin s.. Se calculeaă tensiunile faţă de direcţiile locale în funcţie de deformaţiile specifice faţă de direcţiile locale folosind relaţiile (9.79) în care s-au înlocuit indicii cu litere mari prin indici cu litere mici x x x x C C C C C γ ε ε τ σ σ (9.84). Se exprimă tensiunile faţă de direcţiile globale în funcţie de tensiunile faţă de direcţiile locale utiliând relaţiile (9.) scrise pentru planul xo şi în care se înlocuieşte θ α (rotire în sens invers) x x XY Y X s c s c s c s c c s s c s c τ σ σ τ σ σ. (9.85)
216 6 REZISTENŢ MTERILELOR Înlocuind (9.8) în (9.84) şi (9.84) în (9.85) se obţin tensiunile globale în funcţie de deformaţiile specifice globale σ σ τ X Y XY C C C 6 C C C 6 C C C ε ε γ X Y XY. (9.86) În relaţia (9.86) rigidităţile globale au următoarele expresii C B + B cosθ + B cos4θ C B4 B cos4θ C B B cosθ + B cos4θ 4 cos4 (9.87) C ( B B ) θ 66 B C 6 B sinθ + B sin 4θ C6 B sinθ B sin 4θ unde B + 8 B B ( C + C + C C ) B ( C C ) ( C + C C C66 ) (9.88) 8 ( C + C + 6C C66 ) Înlocuind constantele (9.88) în relaţiile (9.87) reultă 4 4 ( C + C ) sin θ cos θ C θ C C cos θ sin 4 ( C + C ) sin θ cos θ C os θ 4 66 c C C sin θ ( C + C 4 C66 ) sin θ cos θ + ( sin θ + θ ) 4 4 ( C + C C C ) sin θ cos θ + ( sin θ + θ ) C C cos (9.89 a) C C cos ( C C C ) sinθ cos θ + ( C C ) sin θ cosθ C C66 ( C C C ) sin θ cosθ + ( C C C ) sinθ θ C cos La compoite cu proprietăţi superioare deobicei E x este mult mai mare decât E sau G x. Întrucât ν x şi ν x au valori relativ mici rigidităţile pot fi aproximate după cum urmeaă 4 C E x cos θ C E x sin θ 4
217 9. STĂRI DE TENSIUNI ŞI DEFORMŢII 7 C sin θ cos θ C66 sin θ cos θ (9.89 b) E x C6 sinθ cos θ C6 E x sin θ cosθ. E x Similar se calculeaă deformaţiile specifice globale în funcţie de tensiunile globale ε X S S S6 σ X εy S S S6 σ Y. (9.90) γ XY S6 S6 S66 τ XY În relaţia (9.90) elementele matricei de flexibilitate sunt S D + D cosθ + D cos4θ S ( D D ) θ E x 66 4 D 4 cos4 S D D cosθ + D cos4θ S D4 D cos4θ (9.9) S 6 D sinθ + D sin 4θ S6 D sinθ D sin 4θ unde D + 8 D D ( S + S + S S ) D ( S S ) 66 ( S + S S S66 ) (9.9) 8 ( S + S + S S66 ) Pe baa acestora se pot calcula modulele de elasticitate ale laminei cu fibrele orientate la un unghi θ faţă de direcţiile globale E X S E Y S G XY. (9.9) S Deformaţia laminei la întindere uniaxială Este interesant de calculat care este forma deformată a unei platbande de compoit stratificat solicitată la întindere uniaxială pe o direcţie înclinată faţă de fibre dacă se cunosc E x E ν x şi G x. Reultatul este dat de semnul lunecării specifice γ. Dacă σ Y τ 0 66 XY XY şi σ X > 0 atunci din (9.90) reultă γ XY S6σ X deci γ XY are acelaşi semn ca. Pentru unghiuri θ mici S 6

218 8 REZISTENŢ MTERILELOR S 6 D sinθ + D sin4θ ( D + 8D ) θ + ν ( 66 ) x Ex θ S S S θ θ ( + ν ) < 0 x Ex Gx Gx Ex E deoarece x Reultă că γ XY < 0 şi deci platbanda deformată are G x forma din figura 9.. Fig Stratificatul simetric Un stratificat simetric se comportă ca o placă aniotropă omogenă. Sub încărcări în planul stratificatului modulele de elasticitate efective sunt medii aritmetice ale modulelor de elasticitate ale laminelor constituente. Eforturile de membrană sunt decuplate de cele de încovoiere. Fig. 9.4 Laminele sunt lipite una de alta astfel că atunci când sunt solicitate mecanic ele au aceleaşi deformaţii specifice. Deoarece rigidităţile laminelor sunt diferite tensiunile în lamine diferă (fig. 9.4).
219 9. STĂRI DE TENSIUNI ŞI DEFORMŢII Tensiuni şi deformaţii specifice la încărcări coplanare Pentru caracteriarea stării de tensiuni într-un stratificat simetric se folosesc tensiuni medii. cestea se definesc prin relaţiile h σ X σ X dz Y h h h σ σ Y dz τ XY h τ XY dz (9.94) h h unde h este grosimea stratificatului. σ σ τ X Y XY În formă matriceală h h h σ σ τ X Y XY dz h h h C C C unde [ ] este matricea de rigiditate a stratificatului. 6 C C C 6 C C C ε dz ε γ h Primul element al matricei de rigiditate are expresia h h X Y XY [ ] ε ε γ X Y XY (9.95) C dz C dz. (9.96 a) h h h h În cadrul unei lamine coeficienţii poate fi înlocuită printr-o sumă 0 C ij sunt constanţi. Integrala (9.96 a) i i i hi C dz C hi C h h h. (9.96 b) i i Matricea de rigiditate pentru un stratificat simetric se poate obţine adunând termenii corespunători ai matricei de rigiditate pentru fiecare lamină înmulţiţi cu hi procentul volumic vi în lamina i h i [ ] v i [ C ] i i. (9.97) După ce se calculeaă matricea [ ] aceasta poate fi inversată pentru a obţine matricea de flexibilitate a stratificatului [] [ ] a elasticitate pentru stratificat se pot calcula cu relaţiile. Valorile modulelor de
220 0 REZISTENŢ MTERILELOR scrie E X a G XY 66 a 66 E Y XY a a ν (9.98) a a ν. YX a Într-un calcul aproximativ elementul al matricei de rigiditate se poate E x v i cos θ i (9.99) i unde v i este procentul volumic al laminei cu fibre înclinate la θ i în stratificat. Modulul de elasticitate longitudinal al stratificatului poate fi aproximat prin relaţia unde xi E X i 4 4 vi Exi cos θ i (9.00) E este modulul de elasticitate al stratificatului cu fibre înclinate cu unghiul θ i şi procent volumic v i. Fig Tensiuni şi deformaţii specifice la încovoiere Dacă un stratificat simetric este solicitat la încovoiere deformaţiile specifice au o distribuţie liniară (fig. 9.5) dar tensiunile au o variaţie neliniară cu salturi datorită rigidităţilor diferite ale laminelor componente. O analiă similară cu cea din paragraful precedent arată că termenii matricei de rigiditate a stratificatului au forma i I i D C (9.0) Itot i
221 9. STĂRI DE TENSIUNI ŞI DEFORMŢII unde I i şi I tot sunt momentele de inerţie axiale ale laminei i respectiv ale D se obţine matricea de flexibilitate a stratificatului. Prin inversarea matricei [ ] stratificatului şi apoi constantele elastice echivalente ale stratificatului. 9.9 Tensiuni termice Un corp elastic neconstrâns încălit uniform se dilată liber. Variaţia temperaturii produce alungiri specifice fără să apară tensiuni normale. Încălirea uniformă nu produce lunecări specifice şi nici tensiuni tangenţiale. În corpurile din materiale iotrope apar tensiuni termice dacă dilatarea produsă de încălire uniformă este împiedicată sau dacă încălirea produce un câmp neuniform de temperaturi. Tensiuni termice apar şi în materiale aniotrope chiar într-un câmp uniform de temperaturi. În general se consideră că tensiunile termice nu influenţeaă câmpul de temperaturi alungirile specifice calculându-se prin suprapunere liniară adăugând alungirile specifice termice la cele datorite tensiunilor normale produse de sarcinile exterioare. În caul stării plane de tensiuni relaţiile (9.59) devin unde ( x ) ( σ ν σ ) α T ε x x + E ( σ ν σ ) α T ε x + (9.0) E τ x γ x G T este variaţia temperaturii iar α este coeficientul de dilatare termică liniară. În termoelasticitate ecuaţiile diferenţiale de echilibru (9.46) şi (9.47) relaţiile între deformaţii specifice şi deplasări (.0) şi deci ecuaţia de compatibilitate (.) ca şi condiţiile la limită (9.) rămân nemodificate fiind baate pe considerente pur mecanice sau geometrice. Înlocuind deformaţiile specifice (9.0) în ecuaţia de compatibilitate (.) ţinând cont de ecuaţiile de echilibru (9.46) şi (9.47) în care se neglijeaă forţele volumice se obţine o ecuaţie de compatibilitate exprimată în tensiuni x + ( σ + + E T ) 0 x σ α. (9.0)
222 REZISTENŢ MTERILELOR Exemplul 9. Se consideră bara de secţiune dreptunghiulară din figura 9.6 a liberă la T 0 capete supusă unei variaţii de temperatură ( ) T la care se 4 c c calculeaă distribuţia tensiunilor termice pe înălţimea secţiunii. de unde reultă Deoarece τ 0 σ ( ) x d d σ ecuaţia (9.0) devine x σ x ( + α E T ) 0 σ (9.04) x σ E T c. (9.05) x α + + c Constantele de integrare se determină din condiţiile la limită la capete. La x ±L forţa axială şi momentul încovoietor trebuie să fie nule c c σ b d 0 σ b d 0. (9.06) x c c Înlocuind expresia (9.05) în relaţiile (9.06) reultă c α ET d c c c c x c α ET d. (9.07) c Dacă se noteaă momentul de inerţie axial I c b / şi aria bc se obţine relaţia generală de calcul al tensiunilor termice c c b σ + + x α E T T d T d. (9.08) I c c c Fig. 9.6
223 9. STĂRI DE TENSIUNI ŞI DEFORMŢII Pentru distribuţia de temperaturi din figura 9.6 b se obţine T 0 T0 T0 T0 + σ x α E α E. 4 c c c 4 c Distribuţia tensiunilor termice este ilustrată în figura 9.6 c. 9.0 Tensiuni de contact Pe suprafeţele de contact a două corpuri în interacţiune mecanică se devoltă presiuni de valori relativ mari. Exemple tipice sunt rulmenţii dinţii roţilor în agrenare mecanismele cu came roţile de tren pe şina de cale ferată şi rulourile de reemare ale podurilor. Suprafeţele de contact fiind foarte mici forţele de compresiune produc presiuni şi tensiuni de contact relativ mari. Problema este studiată cu metodele Teoriei elasticităţii (teoria lui Hert) interesând atât presiunile de contact cât şi tensiunile în vecinătatea onei de contact. Starea de tensiuni într-o bilă de rulment în vecinătatea onei de contact este de compresiune triaxială solicitare la care materialul reistă mai bine decât la compresiune simplă astfel încât pentru un oţel OL7 cu limita de curgere la compresiune uniaxială σ c 0 MPa se admite o presiune admisibilă de 760 MPa iar la oţelul de rulmenţi presiunea de contact admisibilă ajunge la 800 MPa. Se demonstreaă că în lungul liniei perpendiculare pe suprafaţa de contact tensiunile tangenţiale au valori maxime la o mică distanţă de ona de contact şi nu la suprafaţa piesei în contact cu bila. ceasta explică ruperile locale care duc la exfolieri cojiri desprinderi ("spalling") şi defecte punctiforme ("pitting") generate de fisuri iniţiate la adâncimi de ordinul a 00 µ m sau chiar mai mici în special în inelele rulmenţilor. În caul unei bile de diametru D apăsate cu o forţă F pe o suprafaţă plană (fig. 9.7) raa cercului de contact are valoarea F D r 0 88 (9.09) E unde E este modulul de elasticitate longitudinal al celor două materiale (considerat acelaşi). Presiunea maximă în centrul suprafeţei de contact este 0 6 F E p max. (9.0) D
 din acelaşi material lăţimea suprafeţei dreptunghiulare de contact are valoarea F D 5 b (9.) E l unde E este modulul de elasticitate longitudinal al celor două materiale.")
224 4 REZISTENŢ MTERILELOR În caul unui cilindru de diametru D şi lungime l apăsat cu o forţă F pe o suprafaţă plană (fig. 9.8) din acelaşi material lăţimea suprafeţei dreptunghiulare de contact are valoarea F D 5 b (9.) E l unde E este modulul de elasticitate longitudinal al celor două materiale. Presiunea de contact are o distribuţie eliptică valoarea maximă fiind 0 F E 59 p max. (9.) l D Fig. 9.7 Fig. 9.8 În caul contactului a două sfere de diametru d respectiv d dimensiunile suprafeţei de contact şi valoarea maximă a presiunii de contact se obţin din relaţiile (9.09) şi (9.0) înlocuind diametrul D prin d ( d d ). d + Pentru o bilă de diametru d apăsată în interiorul unei suprafeţe sferice de diametru d > d se înlocuieşte diametrul D prin dd ( d d). În caul contactului a doi cilindri paraleli de diametru d respectiv d lăţimea suprafeţei de contact şi valoarea maximă a presiunii de contact se obţin din relaţiile (9.) şi (9.) înlocuind diametrul D prin d d ( d + d ). Pentru materiale cu coeficientul de contracţie transversală ν 0 tensiunea tangenţială maximă apare la o distanţă 0 78 b de suprafaţa de contact având valoarea τ max 004 p max [6]. Relaţiile de mai sus sunt valabile atunci când dimensiunile suprafeţei de contact sunt mici în comparaţie cu raa bilei sau a cilindrului când materialele sunt liniar-elastice fără să se depăşească limita de proporţionalitate şi când pe suprafaţa de contact acţioneaă numai forţe normale nu şi forţe tangenţiale.
RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii transversale, scrisă faţă de una dintre axele de inerţie principale:,
 REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
ÎNCOVOIEREA BARELOR DREPTE
 CPTOLUL 6 ÎNCOVOERE BRELOR DREPTE 6.1. Încovoierea pură. Formula lui Navier. Considerăm bara de secţiune dreptungiulară din Fig.6.1, pentru care s-au trasat diagramele de eforturi T şi M. Fig.6.1 Se observă
CPTOLUL 6 ÎNCOVOERE BRELOR DREPTE 6.1. Încovoierea pură. Formula lui Navier. Considerăm bara de secţiune dreptungiulară din Fig.6.1, pentru care s-au trasat diagramele de eforturi T şi M. Fig.6.1 Se observă
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...4
 SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
14. Grinzi cu zăbrele Metoda secţiunilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
1. PROBLEMELE REZISTENŢEI MATERIALELOR
 . PROBLEMELE REZISTENŢEI MATERIALELOR.. Obiectul şi problemele reistenţei materialelor Reistenţa materialelor este o disciplină de cultură tehnică generală, situată între ştiinţele fiico-matematice şi
. PROBLEMELE REZISTENŢEI MATERIALELOR.. Obiectul şi problemele reistenţei materialelor Reistenţa materialelor este o disciplină de cultură tehnică generală, situată între ştiinţele fiico-matematice şi
SOLICITAREA DE TRACŢIUNE COMPRESIUNE
 CPITOLUL 4 SOLICITRE DE TRCŢIUE COMPRESIUE 4.1. Forţe axiale Dacă asupra unei bare drepte se aplică forţe dirijate în lungul axei longitudinale bara este solicitată la tracţiune (Fig.4.1.a) sau la compresiune
CPITOLUL 4 SOLICITRE DE TRCŢIUE COMPRESIUE 4.1. Forţe axiale Dacă asupra unei bare drepte se aplică forţe dirijate în lungul axei longitudinale bara este solicitată la tracţiune (Fig.4.1.a) sau la compresiune
FORŢE INTERIOARE. EFORTURI. DIAGRAME DE EFORTURI.
 2.1.Metoda secţiunilor CAPITOLUL 2 FORŢE INTERIOARE. EFORTURI. DIAGRAME DE EFORTURI. În orice corp solid există forţe interioare, de structură, care asigură păstrarea formei şi dimensiunilor corpului.
2.1.Metoda secţiunilor CAPITOLUL 2 FORŢE INTERIOARE. EFORTURI. DIAGRAME DE EFORTURI. În orice corp solid există forţe interioare, de structură, care asigură păstrarea formei şi dimensiunilor corpului.
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Capitolul 14. Asamblari prin pene
 Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
13. Grinzi cu zăbrele Metoda izolării nodurilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...
 SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
5.5. REZOLVAREA CIRCUITELOR CU TRANZISTOARE BIPOLARE
 5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
2. STATICA FLUIDELOR. 2.A. Presa hidraulică. Legea lui Arhimede
 2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
2. STATICA FLUIDELOR 2.A. Presa hidraulică. Legea lui Arhimede Aplicația 2.1 Să se determine ce masă M poate fi ridicată cu o presă hidraulică având raportul razelor pistoanelor r 1 /r 2 = 1/20, ştiind
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
MECANICA CORP DEFORMABIL - NOŢIUNI GENERALE
 MECANICA CORP DEFORMABIL - NOŢIUNI GENERALE 1. Obiectul mecanicii corpului deformabil În mecanica generală corpul solid - este considerat rigid nedeformabil. Această ipoteză este adecvată şi suficientă
MECANICA CORP DEFORMABIL - NOŢIUNI GENERALE 1. Obiectul mecanicii corpului deformabil În mecanica generală corpul solid - este considerat rigid nedeformabil. Această ipoteză este adecvată şi suficientă
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
PLĂCI ŞI STRUCTURI DIN PLĂCI
 8. PLĂCI ŞI STRUCTURI DIN PLĂCI 8.. Generalităţi O placă este un corp solid care are una dintre dimensiuni (grosimea) mai mică decât celelalte două şi poate fi privit ca materialiarea unei suprafeţe, aşa
8. PLĂCI ŞI STRUCTURI DIN PLĂCI 8.. Generalităţi O placă este un corp solid care are una dintre dimensiuni (grosimea) mai mică decât celelalte două şi poate fi privit ca materialiarea unei suprafeţe, aşa
Seminar 5 Analiza stabilității sistemelor liniare
 Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Curs 1 REZISTENTA SI STABILITATEA ELEMENTELOR STRUCTURILOR DIN OTEL
 Curs 1 REZISTENTA SI STABILITATEA ELEMENTELOR STRUCTURILOR DIN OTEL Rezistenta elementelor structurale din otel o Calcul la nivelul secţiunii elementelor structurale (rezistenta secţiunilor) Stabilitatea
Curs 1 REZISTENTA SI STABILITATEA ELEMENTELOR STRUCTURILOR DIN OTEL Rezistenta elementelor structurale din otel o Calcul la nivelul secţiunii elementelor structurale (rezistenta secţiunilor) Stabilitatea
Descriere CIP a Bibliotecii Naționale a României SOFONEA, GALAFTION Rezistența materialelor /
 Galaftion SOFONEA Adrian Marius PASCU REZISTENȚA MATERIAEOR Universitatea ucian Blaga din Sibiu 007 Copyright 007 Toate drepturile asupra acestei lucrări sunt reervate autorilor. Reproducerea integrală
Galaftion SOFONEA Adrian Marius PASCU REZISTENȚA MATERIAEOR Universitatea ucian Blaga din Sibiu 007 Copyright 007 Toate drepturile asupra acestei lucrări sunt reervate autorilor. Reproducerea integrală
 10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
Profesor Blaga Mirela-Gabriela DREAPTA
 DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
7. PROBLEME DE SINTEZĂ (punct, dreaptă, plan, metode)
") PL STZĂ 115 7. PL STZĂ (punct, dreaptă, plan, metode) 7.1 Probleme reolvate 1. Se dă forma geometrică din figura 7.1. Să se repreinte epura ei şi să se studiee tipurile de drepte, plane şi poiţiile relative
PL STZĂ 115 7. PL STZĂ (punct, dreaptă, plan, metode) 7.1 Probleme reolvate 1. Se dă forma geometrică din figura 7.1. Să se repreinte epura ei şi să se studiee tipurile de drepte, plane şi poiţiile relative
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
CUPRINS 9. Echilibrul sistemelor de corpuri rigide... 1 Cuprins..1
 CURS 9 ECHILIBRUL SISTEMELOR DE CORPURI RIGIDE CUPRINS 9. Echilibrul sistemelor de corpuri rigide........... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 9.1. Generalităţi. Legături intermediare...2
CURS 9 ECHILIBRUL SISTEMELOR DE CORPURI RIGIDE CUPRINS 9. Echilibrul sistemelor de corpuri rigide........... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 9.1. Generalităţi. Legături intermediare...2
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III-
 Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III- 3.4. Criterii de plasticitate Criteriile de plasticitate au apărut din necesitatea de a stabili care sunt factorii de care depinde trecerea
Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III- 3.4. Criterii de plasticitate Criteriile de plasticitate au apărut din necesitatea de a stabili care sunt factorii de care depinde trecerea
Algebra si Geometrie Seminar 9
 Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
3. REPREZENTAREA PLANULUI
 3.1. GENERALITĂŢI 3. REPREZENTAREA PLANULUI Un plan este definit, în general, prin trei puncte necoliniare sau prin o dreaptă şi un punct exterior, două drepte concurente sau două drepte paralele (fig.3.1).
3.1. GENERALITĂŢI 3. REPREZENTAREA PLANULUI Un plan este definit, în general, prin trei puncte necoliniare sau prin o dreaptă şi un punct exterior, două drepte concurente sau două drepte paralele (fig.3.1).
TENSIUNI. DEFORMAŢII.
 CAPITOLUL 3 TENSIUNI. DEFORMAŢII. 3.1.Tensiuni Fie un corp solid solicitat de un sistem de forţe în echilibru, ca în Fig. 3.1.a. Fig.3.1 În orice secţiune a corpului solicitat apar forţe interioare care
CAPITOLUL 3 TENSIUNI. DEFORMAŢII. 3.1.Tensiuni Fie un corp solid solicitat de un sistem de forţe în echilibru, ca în Fig. 3.1.a. Fig.3.1 În orice secţiune a corpului solicitat apar forţe interioare care
Capitolul 1. Noțiuni Generale. 1.1 Definiții
 Capitolul 1 Noțiuni Generale 1.1 Definiții Forța este acțiunea asupra unui corp care produce accelerația acestuia cu condiția ca asupra corpului să nu acționeze şi alte forțe de sens contrar primeia. Forța
Capitolul 1 Noțiuni Generale 1.1 Definiții Forța este acțiunea asupra unui corp care produce accelerația acestuia cu condiția ca asupra corpului să nu acționeze şi alte forțe de sens contrar primeia. Forța
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
CUPRINS 5. Reducerea sistemelor de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
Esalonul Redus pe Linii (ERL). Subspatii.
. Subspatii.") Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
a. 11 % b. 12 % c. 13 % d. 14 %
 1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
1. STATICA SISTEMELOR DE CORPURI
 1 1. STATICA SISTEELOR DE CORPURI 1.1. ECHILIBRUL SOLIDULUI RIGID ACŢIONAT DE FORŢE Interacţiunea dintre corpuri se poate manifesta prin contact direct sau la distanţă. Acţiunea forţelor la distanţă se
1 1. STATICA SISTEELOR DE CORPURI 1.1. ECHILIBRUL SOLIDULUI RIGID ACŢIONAT DE FORŢE Interacţiunea dintre corpuri se poate manifesta prin contact direct sau la distanţă. Acţiunea forţelor la distanţă se
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
I. Forţa. I. 1. Efectul static şi efectul dinamic al forţei
 I. Forţa I. 1. Efectul static şi efectul dinamic al forţei Interacţionăm cu lumea în care trăim o lume în care toate corpurile acţionează cu forţe unele asupra altora! Întrebările indicate prin: * 1 punct
I. Forţa I. 1. Efectul static şi efectul dinamic al forţei Interacţionăm cu lumea în care trăim o lume în care toate corpurile acţionează cu forţe unele asupra altora! Întrebările indicate prin: * 1 punct
CURS MECANICA CONSTRUCŢIILOR
 CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune. Huţanu Radu, Axinte Constantin Irimescu Luminita
 Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune Huţanu Radu, Axinte Constantin Irimescu Luminita 1. Generalităţi Există mai multe metode pentru a determina
Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune Huţanu Radu, Axinte Constantin Irimescu Luminita 1. Generalităţi Există mai multe metode pentru a determina
Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].
![Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].](/thumbs/72/67648751.jpg "Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].") Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
Toate subiectele sunt obligatorii. Timpul de lucru efectiv este de 3 ore. Se acordă din oficiu 10 puncte. SUBIECTUL I.
 Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Componente şi Circuite Electronice Pasive. Laborator 3. Divizorul de tensiune. Divizorul de curent
 Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
Laborator 3 Divizorul de tensiune. Divizorul de curent Obiective: o Conexiuni serie şi paralel, o Legea lui Ohm, o Divizorul de tensiune, o Divizorul de curent, o Implementarea experimentală a divizorului
1. PROPRIETĂȚILE FLUIDELOR
 1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
a. Caracteristicile mecanice a motorului de c.c. cu excitaţie independentă (sau derivaţie)
") Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe
 III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe reprezintă totalitatea forțelor care acționează simultan asupra unui corp, Fig. 1. În Fig.
III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe reprezintă totalitatea forțelor care acționează simultan asupra unui corp, Fig. 1. În Fig.
15. Se dă bara O 1 AB, îndoită în unghi drept care se roteşte faţă de O 1 cu viteza unghiulară ω=const, axa se rotaţie fiind perpendiculară pe planul
 INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
INEMTI 1. Se consideră mecanismul plan din figură, compus din manivelele 1 şi 2, respectiv biela legate intre ele prin articulaţiile cilindrice şi. Manivela 1 se roteşte cu viteza unghiulară constantă
Vectori liberi Produs scalar Produs vectorial Produsul mixt. 1 Vectori liberi. 2 Produs scalar. 3 Produs vectorial. 4 Produsul mixt.
 liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
V O. = v I v stabilizator
 Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
Erori si incertitudini de măsurare. Modele matematice Instrument: proiectare, fabricaţie, Interacţiune măsurand instrument:
 Erori i incertitudini de măurare Sure: Modele matematice Intrument: proiectare, fabricaţie, Interacţiune măurandintrument: (tranfer informaţie tranfer energie) Influente externe: temperatura, preiune,
Erori i incertitudini de măurare Sure: Modele matematice Intrument: proiectare, fabricaţie, Interacţiune măurandintrument: (tranfer informaţie tranfer energie) Influente externe: temperatura, preiune,
CALCULUL BARELOR CURBE PLANE
 CPITOLUL 0 CLCULUL BRELOR CURBE PLE 0.. Tesiui î bare curbe plae. Formula lui Wikler Barele curbe plae sut bare care au axa geometrică o curbă plaă. Vom stuia bare curbe plae cu raza e curbură costată,
CPITOLUL 0 CLCULUL BRELOR CURBE PLE 0.. Tesiui î bare curbe plae. Formula lui Wikler Barele curbe plae sut bare care au axa geometrică o curbă plaă. Vom stuia bare curbe plae cu raza e curbură costată,
STATICA CONSTRUCȚIILOR STRUCTURI STATIC DETERMINATE - Îndrumător pentru lucrări -
 Nicolae CHIRA Roxana BÂLC Alexandru CĂTĂRIG Aliz MÁTHÉ Cristian CIPLEA Cristian MOJOLIC Ioana MUREȘAN Cristian CUCEU Radu HULEA Daniela PETRIC STATICA CONSTRUCȚIILOR STRUCTURI STATIC DETERMINATE - Îndrumător
Nicolae CHIRA Roxana BÂLC Alexandru CĂTĂRIG Aliz MÁTHÉ Cristian CIPLEA Cristian MOJOLIC Ioana MUREȘAN Cristian CUCEU Radu HULEA Daniela PETRIC STATICA CONSTRUCȚIILOR STRUCTURI STATIC DETERMINATE - Îndrumător
STATICA CONSTRUCȚIILOR CADRE STATIC NEDETERMINATE
 Nicolae CHIRA Ioana MUREȘAN Roxana BÂLC Cristian MOJOLIC STATICA CONSTRUCȚIILOR CADRE STATIC NEDETERMINATE - Teorie și aplicații - U.T. PRESS Cluj-Napoca, 2015 ISBN 978-606-737-138-3 Editura U.T.PRESS
Nicolae CHIRA Ioana MUREȘAN Roxana BÂLC Cristian MOJOLIC STATICA CONSTRUCȚIILOR CADRE STATIC NEDETERMINATE - Teorie și aplicații - U.T. PRESS Cluj-Napoca, 2015 ISBN 978-606-737-138-3 Editura U.T.PRESS
Curentul electric stationar
 Curentul electric stationar 1 Curentul electric stationar Tensiunea electromotoare. Legea lui Ohm pentru un circuit interg. Regulile lui Kirchhoft. Lucrul si puterea curentului electric continuu 1. Daca
Curentul electric stationar 1 Curentul electric stationar Tensiunea electromotoare. Legea lui Ohm pentru un circuit interg. Regulile lui Kirchhoft. Lucrul si puterea curentului electric continuu 1. Daca
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25
 Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
2.1.1 Grindă dreaptă simplu rezemată încărcată cu o sarcină concentrată
 Seminar. Calculul forțelor de legătură (reacțiunilor) la bare drepte simplu rezemate. Introducere Calculul forțelor de legătură reprezintă primul pas (obligatoriu), din algoritmul de abordare al oricărei
Seminar. Calculul forțelor de legătură (reacțiunilor) la bare drepte simplu rezemate. Introducere Calculul forțelor de legătură reprezintă primul pas (obligatoriu), din algoritmul de abordare al oricărei
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Problema a II - a (10 puncte) Diferite circuite electrice
 Diferite circuite electrice") Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Tranzistoare bipolare şi cu efect de câmp
 apitolul 3 apitolul 3 26. Pentru circuitul de polarizare din fig. 26 se cunosc: = 5, = 5, = 2KΩ, = 5KΩ, iar pentru tranzistor se cunosc următorii parametrii: β = 200, 0 = 0, μa, = 0,6. a) ă se determine
apitolul 3 apitolul 3 26. Pentru circuitul de polarizare din fig. 26 se cunosc: = 5, = 5, = 2KΩ, = 5KΩ, iar pentru tranzistor se cunosc următorii parametrii: β = 200, 0 = 0, μa, = 0,6. a) ă se determine
Geometrie computationala 2. Preliminarii geometrice
 Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
CURS XI XII SINTEZĂ. 1 Algebra vectorială a vectorilor liberi
 Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
IV. STATICA SISTEMELOR DE CORPURI RIGIDE. GRINZI CU ZĂBRELE
 IV. STATICA SISTEMELOR DE CORPURI RIGIDE. GRINZI CU ZĂBRELE 4.1 Consideraţii generale În numeroase probleme de echilibru corpurile rigide interacţionează mecanic, formând sisteme de corpuri rigide între
IV. STATICA SISTEMELOR DE CORPURI RIGIDE. GRINZI CU ZĂBRELE 4.1 Consideraţii generale În numeroase probleme de echilibru corpurile rigide interacţionează mecanic, formând sisteme de corpuri rigide între
Lucian Maticiuc SEMINAR Conf. dr. Lucian Maticiuc. Capitolul VI. Integrala triplă. Teoria:
 Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
Lucrul mecanic şi energia mecanică.
 ucrul mecanic şi energia mecanică. Valerica Baban UMC //05 Valerica Baban UMC ucrul mecanic Presupunem că avem o forţă care pune în mişcare un cărucior şi îl deplasează pe o distanţă d. ucrul mecanic al
ucrul mecanic şi energia mecanică. Valerica Baban UMC //05 Valerica Baban UMC ucrul mecanic Presupunem că avem o forţă care pune în mişcare un cărucior şi îl deplasează pe o distanţă d. ucrul mecanic al
Conice - Câteva proprietǎţi elementare
 Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
CURS 9 MECANICA CONSTRUCŢIILOR
 CURS 9 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA NOŢIUNI DE BAZĂ ÎN CINEMATICA Cinematica studiază mişcările mecanice ale corpurilor, fără a lua în considerare masa acestora şi
CURS 9 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA NOŢIUNI DE BAZĂ ÎN CINEMATICA Cinematica studiază mişcările mecanice ale corpurilor, fără a lua în considerare masa acestora şi
Exemple de probleme rezolvate pentru cursurile DEEA Tranzistoare bipolare cu joncţiuni
 Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
VII.2. PROBLEME REZOLVATE
 Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
IV. CUADRIPOLI SI FILTRE ELECTRICE CAP. 13. CUADRIPOLI ELECTRICI
 V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
Lectia VII Dreapta si planul
 Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
CUPRINS 8. Statica solidului rigid... 1 Cuprins..1
 CURS 8 STATICA SOLIDULUI RIGID CUPRINS 8. Statica solidului rigid.......... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 8.1. Generalităţi...2 8.2. Echilibrul solidului rigid liber...4 Test de
CURS 8 STATICA SOLIDULUI RIGID CUPRINS 8. Statica solidului rigid.......... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 8.1. Generalităţi...2 8.2. Echilibrul solidului rigid liber...4 Test de
CALCUL FUNDAȚIE IZOLATĂ DE TIP TALPĂ DE BETON ARMAT. Fundație de tip 2 elastică
 CALCUL FUNDAȚIE IZOLATĂ DE TIP TALPĂ DE BETON ARMAT Fundație de tip 2 elastică FUNDAȚIE DE TIP 2 TALPĂ DE BETON ARMAT Etapele proiectării fund ației și a verificării terenului pe care se fundează 1. D
CALCUL FUNDAȚIE IZOLATĂ DE TIP TALPĂ DE BETON ARMAT Fundație de tip 2 elastică FUNDAȚIE DE TIP 2 TALPĂ DE BETON ARMAT Etapele proiectării fund ației și a verificării terenului pe care se fundează 1. D
Ovidiu Gabriel Avădănei, Florin Mihai Tufescu,
 vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
CUPRINS 2. Sisteme de forţe... 1 Cuprins..1
 CURS 2 SISTEME DE FORŢE CUPRINS 2. Sisteme de forţe.... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 2.1. Forţa...2 Test de autoevaluare 1...3 2.2. Proiecţia forţei pe o axă. Componenta forţei
CURS 2 SISTEME DE FORŢE CUPRINS 2. Sisteme de forţe.... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 2.1. Forţa...2 Test de autoevaluare 1...3 2.2. Proiecţia forţei pe o axă. Componenta forţei
I. NOŢIUNI FUNDAMENTALE DIVIZIUNILE MECANICII. PRINCIPIILE MECANICII CLASICE SISTEME ŞI UNITĂŢI DE MĂSURĂ
 I. NOŢIUNI FUNDAMENTALE DIVIZIUNILE MECANICII. PRINCIPIILE MECANICII CLASICE SISTEME ŞI UNITĂŢI DE MĂSURĂ 1.1 Noţiuni fundamentale Mecanica este una dintre ştiinţele fundamentale ale naturii, având ca
I. NOŢIUNI FUNDAMENTALE DIVIZIUNILE MECANICII. PRINCIPIILE MECANICII CLASICE SISTEME ŞI UNITĂŢI DE MĂSURĂ 1.1 Noţiuni fundamentale Mecanica este una dintre ştiinţele fundamentale ale naturii, având ca
Dreapta in plan. = y y 0
 Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
8 Intervale de încredere
 8 Intervale de încredere În cursul anterior am determinat diverse estimări ˆ ale parametrului necunoscut al densităţii unei populaţii, folosind o selecţie 1 a acestei populaţii. În practică, valoarea calculată
8 Intervale de încredere În cursul anterior am determinat diverse estimări ˆ ale parametrului necunoscut al densităţii unei populaţii, folosind o selecţie 1 a acestei populaţii. În practică, valoarea calculată
STATICA CONSTRUCȚIILOR STRUCTURI STATIC NEDETERMINATE
 Nicolae CHIRA Roxana BÂLC Alexandru CĂTĂRIG Aliz MÁTHÉ Cristian MOJOLIC Ioana MUREȘAN STATICA CONSTRUCȚIILOR STRUCTURI STATIC NEDETERMINATE - Îndrumător pentru lucrări - U.T. PRESS Cluj-Napoca, 2014 ISBN
Nicolae CHIRA Roxana BÂLC Alexandru CĂTĂRIG Aliz MÁTHÉ Cristian MOJOLIC Ioana MUREȘAN STATICA CONSTRUCȚIILOR STRUCTURI STATIC NEDETERMINATE - Îndrumător pentru lucrări - U.T. PRESS Cluj-Napoca, 2014 ISBN
Capitolul 4. Integrale improprii Integrale cu limite de integrare infinite
 Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval