AUTOMOBILOVÁ ELEKTRONIKA I
|
|
|
- Ζαχαρίας Γκόφας
- 6 χρόνια πριν
- Προβολές:
Transcript



1 Moderné vzdelávanie pre vedomostnú spoločnosť/ Projekt je spolufinancovaný zo zdrojov EÚ AUTOMOBILOVÁ ELEKTRONIKA I Fakulta elektrotechniky a informatiky Ján Gamec 1
2 Táto publikácia vznikla za finančnej podpory z Operačného programu VZDELÁVANIE. Európskeho sociálneho fondu v rámci Prioritná os 1 Opatrenie 1.2 Reforma vzdelávania a odbornej prípravy Vysoké školy a výskum a vývoj ako motory rozvoja vedomostnej spoločnosti. Názov projektu: Balík doplnkov pre ďalšiu reformu vzdelávania na TUKE ITMS NÁZOV: Automobilová elektronika AUTORI: doc. Ing. Ján Gamec, CSc. RECENZENTI: prof. Ing. Aurel Sloboda, CSc., Ing. Emil Matúš, PhD. VYDAVATEĽ: Technická univerzita v Košiciach ROK: 2015 ROZSAH: 248 strán NÁKLAD: 70 ks VYDANIE: prvé ISBN: Rukopis neprešiel jazykovou úpravou. Za odbornú a obsahovú stránku zodpovedajú autori. 2
3 Obsah Zrod automobilov Stručná história elektroniky v automobiloch Najrozšírenejšie senzorové systémy dneška Motor Riadenie prevodovky Vedenie vozidla a riadenie Senzory bezpečnosti vozidla Systémy riadenia trakcie Monitorovanie stavu pneumatík Vývoj a budúcnosť Senzory polohy Základné optické senzory automobilov Lineárny senzor pozície Senzor natočenia hriadeľa riadenia Optický kodér polohy hriadeľa Odporové potenciometre Senzory so skratujúcim prstencom Diferenčné senzory Iné typy senzorov Senzory s VF vírivými prúdmi Integrované obvody s Hallovou sondou Senzory budúcnosti Magnetorezistívne Ni-Fe tenkovrstvové senzory Magnetorezistívny senzor uhla natočenia v pseudohallovej konfigurácii Senzory merania vzdialenosti medzi vozidlami Senzory magnetického poľa Senzory otáčok a rýchlosti Indukčné senzory Senzory založené na Hallovom jave s lopatkovými prerušovačmi Novšie senzory Gradientné senzory Tangenciálne senzory
4 Oscilačné gyrometre Piezoelektrický senzor rýchlosti vybočenia Mikromechanický senzor uhlovej rýchlosti s dvojitou ladičkou Radarové senzory Senzory akcelerácií a vibrácií Akceleračný senzor využívajúci Hallov jav Piezoelektrické senzory Kremíkový polovodičový senzor Senzory tlaku, sily, krútiaceho momentu Senzory tlaku Hrubovrstvový senzor tlaku Polovodičové senzory tlaku Piezoelektrické senzory Senzory vysokého tlaku s kovovou membránou Senzory sily a krútiaceho momentu Magnetoelastický senzors orientovaným valčekom Koncepcie nových senzorov Meranie krútiaceho momentu Senzor momentu založený na meraní mechanického napätia Senzor krútiaceho momentu vyhodnocujúci uhol natočenia Senzory prietoku, koncentracie, vlhkosti Merače prietoku Senzory prietoku založené na meraní objemu Ultrazvukové meranie Senzor založený na Pitotovej trubici Meranie hmotnosti vzduchu Mikromechanické senzory hmotnosti Senzory koncentrácie kyslíka vo výfukových plynoch Chemorezistívne sensory Článok koncentrácie Senzory založené na elektrochemických pumpách Senzory vlhkosti Senzory teploty
5 Automobilová elektronika I Ján Gamec Katedra elektroniky a multimediálnych telekomunikácií
6 Zrod automobilov Automobilová história začala v roku 1765, keď dôstojník francúzskej armády Nicholas CUGNOT vyvinul samohybný, parou poháňaný voz, ktorý uviezol 4-roch pasažierov, rýchlosťou približne 3 km/h. Samozrejme jedna z jeho prvých jázd viedla ulicami Paríža. Vozidlo sa prevrátilo a CUGNOT bol uväznený pre verejné ohrozenie.

7 Navzdory tomuto neúspechu vývoj pokračoval a v roku 1885 Karl BENZ vyrobil dnes ako prvý uznávaný automobil, ktorý využíval motor s vnútorným spaľovaním. Tri-Car 1885
8 Tri-Car 1885 Tri kolesá Elektrické zapaľovanie Hnaná zadná náprava s diferenciálom (mechanicky ovládané nasávacie ventily) Vodou chladený motor Benzínový, štvortaktný horizontálny, jednoválcový. Vrtanie 116 mm, zdvih 160 mm Patent model: 958 cm 3, 0,8HP, 600W, 16km/h Komerčný model: 1600cm 3, 0,75HP, 8mph Riadenie prednej nápravy

9 Replika patentovaného automobilu Karla Benza (29 január 1886)
10 Počas vyše tých 130 rokov, ktoré odvtedy uplynuli sa automobil vyvinul z hrubého mechanického zariadenia na veľmi zložitý produkt, ktorý by nemohol existovať bez sofistikovanej elektronickej technológie. Pravdepodobne najväčšie zmeny nastali za posledných 30 až 40 rokov. V spomínanom období boli vďaka vývoju fascinujúcich kombinácii elektronických a mechanických inžinierskych riešení splnené zdanlivo nesplniteľné požiadavky na dosiahnutie nízkych emisií, ekonomickosti spotreby paliva a jazdných vlastností. Trend naďalej smeruje k rastu počtu elektronicky riadených systémov.
11 Stručná história elektroniky v automobiloch Automobily v počiatkoch mali elektrické komponenty iba v systémoch zapaľovania ako sú magneto alebo batéria a indukčná cievka, vyvinuté Charlesom Ketteringom v roku 1908 (a boli používané až do 90- tých rokov, v niektorých motoroch sa používajú dodnes). Po roku 1920 bol elektrický systém rozšírený o štartér a osvetlenie.
12 Prvým skutočným elektronickým systémom, ktorý bol nainštalovaný do automobilov v priebehu 30-tých rokov bol rádioprijímač. Samozrejme, že elektrónky neboli príliš vhodné pre prostredie automobilu, čím sa takýto prijímač stal notoricky nespoľahlivý a táto myšlienka sa neujala až do nástupu tranzistorových prijímačov 60-tých rokov. Po elektrickej stránke sa až do druhej polovice 60-tých rokov automobil vyvinul veľmi málo a v svojej podstate to bol mechanický systém s mechanickým riadením.
13 Hlavným stimulom pre vývoj lacných a spoľahlivých elektronických systémov pre automobily sa stala skutočnosť, že americký kongres v roku 1970 konštatoval zhoršujúcu sa kvalitu ovzdušia v amerických mestách, na ktorú upozornil senátor MUSKIE a vyzýval k veľkej redukcii emisii, produkovaných automobilmi. Tzv. MUSKIE-ho zákony požadovali, aby všetky automobily predávané v USA po roku mali úroveň znečisťujúcich emisii o 90% nižšiu ako tie do roku Zvláštny dôraz bol kladený na minimalizáciu CO, rôznych oxidov dusíka, spoločne označovaných NO x a nespálených uhľovodíkov. V tom istom čase bola vytvorená EPA (Environmental Protection Agency Agentúra na ochranu životného prostredia), ktorá dohliadala na legislatívu.
14 Automobilový priemysel vzhľadom na krátkosť času okamžite preskúmal všetky dostupné technológie a dospel k názoru, že v najbližšom čase prichádza do úvahy iba spracovanie výfukových plynov v katalytických konvertoroch (katalyzátoroch). Pôvodne boli použité iba oxidačné katalyzátory, ktoré odstraňovali HC a CO.
15 Emisie NO x boli potom redukované použitím EGR (Exhaust Gas Reduction) techník, pri ktorých sa nahrádzala malá časť (6-10%) nasávanej zmesi výfukovými plynmi. Tieto pôsobia ako inertné zriedenie, čo vplýva na zníženie teploty spaľovania a tým aj na úroveň NO x. Následne, v neskorších 70-tých rokoch, tak ako boli dovolené limity NO x ďalej redukované, boli použité trojcestné katalyzátory, ktoré odstraňovali všetky tri regulované znečisťujúce zložky za pomoci elektronických spätnoväzobných riadiacich systémov. Tieto presne riadili pomery vzduchu a paliva privádzané do motora.
16 To viedlo k dopytu (vyžiadaný potrebou) po pokročilejších elektronicky riadených systémoch zo strany amerického automobilového priemyslu. Napr. po roku 1981 bolo do benzínových motorov z produkcie General Motors začlenené riadenie na báze mikropočítačov. Táto skutočnosť si vyžiadala výrobu 3,7 milióna elektronických riadiacich jednotiek (ECU- Electronic Control Unit) ročne. To znamenalo ks ECU denne iba pre túto jednu firmu.
17 Ďalší rozvoj elektronických riadiacich systémov zaznamenal rýchly nárast a postihol už nie iba elektronické riadenie motora ale takmer všetkých súčasti automobilu, ktoré zvyšujú úžitkovú hodnotu vozidla z hľadiska aktívnej bezpečnosti, pasívnej bezpečnosti, jazdných vlastnosti, komfortu a komunikačných schopnosti. V súčasnosti sa v automobiloch uplatňujú poznatky takmer zo všetkých oblastí elektroniky a telekomunikácií.
18 Senzory a systémy v automobiloch pred viac ako 40 timi rokmi boli obmedzené na: rýchlosť auta, otáčky motora (nepresné neskôr rozšírené o); teplota chladiacej kvapaliny (voda), úroveň paliva v nádrži, poruchy v systéme mazania (tlak oleja).
19 Táto základná senzorová technológia dávala predpoklad na: zvýšenú pravdepodobnosť vzniku chýb a nepresností zo strany vodiča, psychický tlak a stres v stále náročnejších dopravných podmienkach (hustá premávka, prípadne pri riadení vozidla na dlhé vzdialeností). Stresy a psychický tlak môže byť dokonca vyšší u ľudí, pre ktorých je riadenie vozidla zamestnaním.
20 Dnešný čoraz viac narastajúci konkurenčný trh je spätý: s prísnym environmentálnym a bezpečnostným zákonodarstvom; s očakávaním vysokej úrovne ovládania a výkonnosti; s orientáciou na vozidlá s autodiagnostikou a manažmentom so zdokonaľovaním komfortu a luxusu s dostupnosťou lacných elektronických zariadení.
21 Človek môže byť v niektorých prípadoch vnímaný ako súčasť týchto systémov, tak ako je to zrejmé z obr.
22 Najrozšírenejšie senzorové systémy dneška Hlavnou skupinou senzorových systémov automobilov dneška sú senzory použité pre: monitorovanie a riadenie motorov, monitorovanie a riadenie prevodoviek. Rýchlo sa rozširujú aj senzorové systémy pre riadenie jazdných vlastností a podvozka. Výrazne napreduje aj uplatňovanie senzorových systémov pasívnej a aktívnej bezpečnosti vodiča a pasažierov.
23 Motor Typy senzorov, použité pri riadení motora a prevodovky závisia od monitorovaných parametrov: Absolútny tlak v nasávacom potrubí motora, Uhol natočenia kľukového hriadeľa Množstvo nasatého vzduchu Poloha škrtiacej klapky (Informácia sa využíva taktiež pri príprave zmesi ) Obsah kyslíka vo výfukových plynoch (riadene emisných charakteristík motora. senzor)
24 Teplota motora. veličina môže byť použitá ako premenná pre riadiacu jednotku systému. Najčastejšie sa ako senzory používajú drôtové odpory alebo termistory, Klepanie motora
25 Riadenie prevodovky Pri manuálnych prevodovkách je vodič súčasťou spätnoväzobnej slučky, ktorá je inak otvorenou slučkou. Vyhodnocovaním rýchlosti otáčania motora (otáčky motora) a kolies (rýchlosť pohybu vozidla) ako aj požiadaviek na krútiaci moment, mení prevodový pomer prevodovky. Tento proces je znázornený na obr. (Podrobnejšie v časti Systémy aktívnej a pasívnej bezpečnosti)
26 Otáčky motora (zvyčajne sa odvádzajú zo snímačov pre analýzu polohy kľukového hriadeľa) vodič vníma intuitívne v podobe zvukov a hluku, sú jedným z parametrov, ktoré sú ovládané v snahe dosiahnuť požadovanú rýchlosť, zrýchlenie a ovládateľnosť vozidla. Tento proces nemusí byť vždy v súlade so zámerom dosiahnuť optimálne výkonové alebo iné charakteristiky motora. Dôležitou úlohou vodiča pri riadení vozidla je voľba vhodného prevodového pomeru.
27 V týchto aplikáciách sú potrebné senzorové systémy (napr. optické), ktoré monitorujú stav a opotrebovanosť mechanických častí a lamiel spojky. Tieto systémy sú potrebné aj pri elektronicky riadených automatických prevodovkách, v ktorých je proces riadenia relatívne zložitý.
28 Vedenie vozidla a riadenie K senzorovým systémom potrebným pre jazdu vozidla, komfort a ovládanie patria tie, ktoré umožňujú manažment podvozka a systému riadenia. Patrí sem systém zavesenia, pruženia a tlmenia, brzdný systém a systém riadenia trakcie. Väčšina senzorov, ktorých výstupy sú použité pre manažment podvozka a systému riadenia napomáhajú pri vedení vozidla, ktoré je ovplyvňované systémom zavesenia, pruženia a tlmenia.
29 Primárnou funkciou systému zavesenia je riadiť polohu vozidla vzhľadom na povrch vozovky. To predstavuje monitorovanie a riadenie všetkých parametrov pohybu vozidla ako sú znázornené na obr. (sklon - pitch, prevalenie roll, nadskočenie bounce, vybočenie yaw, ). Existuje niekoľko typov systémov zavesenia (napr. pasívne, semi aktívne, aktívne) [14]. Aj keď vo väčšine súčasných vozidiel nižšej a strednej triedy je pasívny systém zavesenia, ktorý zahŕňa pružiny a tlmiče. Novšie a hlavne vozidla vyšších tried už disponujú adaptívnymi aktívnymi systémami.
30 Hlavnou úlohou riadenia zavesenia je zabezpečiť za všetkých podmienok primerane komfortnú jazdu a ovládanie. To vyžaduje použitie (pre daný účel vhodných) senzorov a senzorových systémov aby sa zabezpečilo monitorovanie parametrov, ktoré boli uvedené na obr ako aj uplatňovanie potrebnej stratégie riadenia. Vhodná stratégia minimalizuje nepravidelný a rušivý pohyb odpruženej hmoty a pasažierov. Podobne vhodná stratégia optimalizuje riadenie pohybu neodpruženej hmoty, čím sa maximalizuje adhézia pneumatík k povrchu vozovky pri vedení a riadení vozidla (napr. riadenie trakcie).
31 Dnes sú známe mnohé riadené systémy zavesenia [13,15-22] ale väčšina senzorov a systémov je podobná. Typický riadený systém zavesenia zahŕňa senzory pre monitorovanie vertikálneho pohybu (nadskočenie) kolies vzhľadom k telu (karosérii) vozidla. Škála senzorov, ktorá patrí do tejto skupiny je od jednoduchých potenciometrov až k zložitejším ako sú indukčné, alebo optické založené na optických mriežkach a ich využití pri monitorovaní translačného pohybu. V niektorých prípadoch sú použité sonarové senzory a slúžia na monitorovanie relatívneho pohybu tela vozidla a vozovky. Systémy pre zisťovanie akcelerácie (akcelerometre) poskytujú informáciu prechádzaní vozidla zákrutami.
32 Tak ako je to zrejme z obr., signál z akcelerometra a senzorov posunutia môže byť použitý pre aktiváciu a riadenie aktuátora zavesenia rozdielovým signálom. Akcelerometrické senzory môžu byť tiež použité pre pokročilejšie brzdné systémy ako napr. tie, v ktorých je zabudovaný ABS (Antilock Braking System), ESP (Electronic Stability Program), prípadne v systémoch riadenia trakcie, v systémoch riadenia jazdy z kopca alebo v bezpečnostných systémoch (napr. Airbag).
33 V systémoch riadenia zavesenia (podvozka) je použitá kombinácia senzorov na monitorovanie a riadenie sklonu, prevaľovania a nadskakovania ale pohyb vybočenia by mal byť monitorovaný senzorom rýchlosti zatočenia (napr. optický vláknový gyroskop, tuholátkové piezoelektrické prvky). Celková stratégia riadenia zohľadňuje výstup zo senzora natočenia volantu (optický senzor uhla natočenia), senzora rýchlosti vozidla (napr. senzor na báze Halloveho javu) a senzora polohy škrtiacej klapky (optický senzorový systém alebo potenciometrické senzory obr.).
34 Senzory bezpečnosti vozidla Aspekt bezpečnosti vozidla v poslednom čase naberá na dôležitosti a je významným faktorom pri konštrukcii vozidiel. Senzorové systémy môžu byť tak v pasívnych ako aj v aktívnych systémoch bezpečnosti vozidla. Príkladom systémov pasívnej bezpečnosti vozidla je nafukovacia zábrana všeobecne známa pod názvom airbag. Príkladom systémov aktívnej bezpečnosti sú systémy pre zamedzenie preklzávania kolies pri brzdení ABS (Antilock Breaking System), systémy riadenia trakcie a určitým spôsobom aj systémy monitorovania stavu pneumatík.
35 ABS Brzdy so zamedzením zablokovania sú systémom, ktorý zamedzuje vzniku nehody. Zaradením relevantných senzorových systémov, akými sú senzory otáčok jednotlivých kolies s vyhodnocovaním uhlového zrýchlenia, je možné zamedziť zablokovaniu kolies počas silného brzdenia v nebezpečenstve ale hlavne ak je vozovka klzká. Pri zablokovaní kolies sa nielen znižuje účinnosť brzdenia, ale sa stráca aj možnosť riadenia predných kolies.
36 V ABS sa používajú senzory na monitorovanie spomalenia otáčania sa kolesa ak sú aktivované brzdy. Ak je niektoré koleso zablokované, systém začne modulovať tlak v brzdnom systéme. Pulzovanie tlaku v brzdách sa deje rýchlejšie ako by to bol schopný vykonávať vodič, čím sa dosiahne spojité otáčanie, resp. odvaľovanie kolies. Zamedzuje sa tým zablokovaniu kolies, ktoré môžu primerane reagovať na pohyb volantu. Vhodné senzorové systémy, aplikované v ABS tak umožňujú riadiť vozidlo aj pri prudkom brzdení v stave ohrozenia.
37 Systémy riadenia trakcie Systém riadenia trakcie je iným systémom, ktorý zabraňuje alebo znižuje možnosť vzniku nehody. Zamedzuje nekontrolovanému pretáčaniu kolies vozidla a tak zamedzuje vozidlu vybočeniu do šmykľavých zón vozovky (okraje, krajnice), alebo k vybočeniu na šmykľavých povrchoch. Vo väčšine vozidiel s riadením trakcie, systém pracuje iba počas akcelerácia a potom sa neuplatňuje. V drahších systémoch pracuje pri všetkých rýchlostiach. Tie isté senzory ako pri ABS, ktoré monitorujú zablokovanie kolies, môžu byť použité aj pre monitorovanie nekontrolovaného otáčania sa kolies.
38 Systém riadenia trakcie počas prevádzky zisťuje, či sa jedno z kolies neotáča rýchlejšie ako iné a aktivuje impulzné brzdenie, čím obmedzuje jeho preklzávanie. Následne táto akcia spôsobí prenos väčšej hnacej sily z motora na ostatné kolesá (za predpokladu existencie diferenciálu), čím sa zlepšuje ovládateľnosť a prenos trakčnej sily. Činnosť systému môže byť spriahnutá s ovládaním motora, kde ak systém pôsobí dlhšie ako definovaný čas (napr. 2s), riadenie motora preruší dodávku paliva do vybraných valcov, čím zníži výkon a otáčky motora. To znižuje namáhanie bŕzd, prevodovky a predlžuje sa proces riadenia trakcie. Na palubnej doske je zobrazovaná informácia o aktivovaní a činnosti systému.
39 Monitorovanie stavu pneumatík Na množstvo parametrov vozidla vplýva stav pneumatík vozidla. Medzi hlavné parametre pneumatík, ktoré môžu byť počas prevádzky zisťované, prípadne nastavované, a ktoré vplývajú na jej bezpečnosť a ekonomickosť, patria tlak a teplota. K iným patria šírka pneumatiky, hĺbka dezénu, odklon, hádzanie prípadne prešmykovanie. Výber monitorovaných parametrov závisí od typu senzorov a hlavne od stratégie. K najčastejšie používaným senzorovým systémom v oblasti monitorovania stavu pneumatík sú systémy merania tlaku a teploty v statickom alebo dynamickom režime.
40 Jedným zo spôsobov je použitie piezorezistívnych senzorov tlaku namontovaných na koleso. Pri otáčaní kolesa sa musí zabezpečiť prenos energie na napájanie senzora a tiež spätne prenos signálu o hodnote sledovaného parametra. To sa realizuje zberným bezkontaktným systémom, ktorým môže byť kruhová anténa, namontovaná na koleso ako je to zrejme z obr. Kruhová anténa spolupracuje s pevnou anténou, ktorá je upevnená na strmeni bŕzd spolu s príslušným dekodérom signálu.
41 Tento systém pracuje v dvoch fázach. V prvej fáze sa pomocou dvoch antén prenáša energia pre napájanie senzora. Tá je uchovaná v kondenzátoroch a následne je použitá v druhej fáze, pre napájanie senzorov teploty a tlaku ako aj pre odoslanie informácie o ich hodnotách. Tento systém môže pracovať kontinuálne s presnosťou jednotiek percent.
42 Vývoj a budúcnosť Je ťažké presne definovať vývoj technológií v automobilovej oblasti. Je ale dôvodné domnievať sa, že auto budúcnosti bude cestné vozidlo s určitým stupňom inteligencie, ktoré disponuje schopnosťou diagnostikovať samo seba a schopnosťou rozhodovať sa v zložitých situáciách pri navigácii.
43 Senzorové technológie blízkej budúcnosti a súčasnosti predstavujú inteligentné systémy riadenia dráhy vozidla (Cruise Control), automatické navádzacie systémy a pokročilé systémy počítačového videnia. Inteligentné systémy riadenia dráhy budú obsahovať radarové systémy naviazané na elektronické zariadenia, ktoré definujú množinu časových intervalov potrebných na bezpečné udržiavanie vzdialenosti od objektov pred vozidlom prepojené s riadením motora a prevodovky.
44 Príkladom je radarový systém na obr., ktorý má zamedziť kolízii s objektmi spred vozidla. V budúcnosti zrejme pribudnú systémy v oblasti infračerveného osvetľovania a snímania pre zabezpečenie dostatočnej viditeľnosti čo sa týka dĺžky dosahu ale aj viditeľnosti v nepriaznivých klimatických podmienkach, prípadne pre detekciu osôb v blízkosti vozovky. Vývoj protikolíznych radarov smeruje tak do optických oblastí ako aj infračervenej, prípadne ultrasonickej so zámerom detekcie polohy a pokračovania vozovky v miestach zlej viditeľnosti.
45 Senzory polohy (posunutie, vzdialenosť, uhol natočenia)
46 Možno ich rozdeliť na senzory, ktoré priamo monitorujú veľkosti veličín ako sú: poloha škrtiacej klapky, poloha akceleračného pedálu, poloha a pohyb hrebeňového riadenia, úroveň paliva, pohyb servojednotky spojky, uhol natočenia riadenia (volantu), uhol náklonu, uhol smeru vozidla, poloha brzdového pedálu,
47 alebo senzory pre nepriame monitorovanie veličín ako: uhol vychýlenia klapky (merač rýchlosti prietoku), uhol vychýlenia pružného nosníka (akcelerácia), prehnutie membrány (tlak), pohyb a stlačenie systému zavesenia (nastavenie polohy svetlometov vo vertikálnom smere) Torzný uhol (moment)
48 Základné optické senzory automobilov Optické senzorové systémy v patria aplikáciách pre automobily k novším typom v ich vývoji Lineárny senzor pozície Meranie lineárneho posunutia sa uplatňuje v širokom rozsahu aplikácií. Možno sa s nimi stretnúť v systémoch zavesenia, pri automatickom nastavovaní polohy sedadla prípadne polohy radiacej páky a iných.
49 Príklad základného a jednoduchého lineárneho pozičného optického senzora je na obr. Senzor pozostáva z páru detektorov, z ktorých jeden je umiestnený v ohnisku šošovky a druhý je vertikálne posunutý. Na jeden senzor dopadá fokusované svetlo a druhý je neosvetlený v prípade, že zdroj svetla je v dostatočnej vzdialenosti. Signál z detektora, ktorý je umiestnený v ohnisku je nezávislý od vzdialenosti zdroja svetla. Tento signál môže byť použitý ako referenčný.
50 Lineárny senzor pozície d 2 d 1 Poloha LED - stabilná Ohnisková vzdialenosť šošovky Vzdialenosť dvojice snímačov od šošovky je nastaviteľná
51 Výstup z druhého detektora súvisí s prevrátenou hodnotou mocniny vzdialenosti medzi zdrojom svetla a šošovkou a tak môže byť využitý ako signál miery vzdialenosti. Opísaný princíp má nevýhodu v tom, že zdroj svetla aj detektory by mali byť umiestnené na odlišných vzájomne sa pohybujúcich častiach. Táto nevýhoda môže byť odstránená použitím reflexných prvkov avšak tieto musia byť udržiavané v čistote.
52 Senzor natočenia hriadeľa riadenia Optické senzory určené na monitorovanie rotácie riadenia (volantu) sú zvyčajne charakterizované rozlišovacou schopnosťou uhla natočenia (napr. 2º), priestorom, v ktorom sú umiestnené typom výstupného signálu a pod. Na obr je znázornený optický senzor, zabudovaný na hriadeľ riadenia. Najčastejšie je v podobe dvoch typov optických senzorov. Metóda optického snímania je rovnaká v oboch prípadoch, rozdiel je v prívode svetla na detektory.
53 23 mm 35 mm Optický senzor na hriadeli riadenia Zdroj svetla Svetlovody Riadiaca tyč Upnuté koliesko Vonkajší kryt d 1 d 2 d 3 d 4
54 V jednom prípade sa využíva prechádzajúce svetlo v druhom odrazené. Ako je zrejmé z obr, transmisívna metóda využíva koliesko z plexiskla upevnené na hriadeľ riadenia. Vyleptaním série priesvitných prípadne tmavých zárezov do kolieska toto pôsobí ako prerušovač. Tým sa získa signál, z ktorého je možné určiť aj smer otáčania. Optická hlavica je sendvičová štruktúra plochých svetlovodov, z ktorých je každý zakončený nezávislým detektorom. Tým sa získa uhlové rozlíšenie úmerné počtu zárezov vynásobených počtom svetlovodov (pripadajúcich na zárez) v štruktúre.
55 Transmisívny optický senzor na hriadeli riadenia Elektronika Nepohyblivý kryt Detail optického kolieska Tyč riadenia LED dióda Optické koliesko Pole optických vlnovodov
56 Použitím reflexných plôch namiesto priesvitných je možné uplatniť reflexnú metódu. Koaxiálnym umiestnením reflexných a čiernych pásikov pozdĺž hriadeľa je možné získať modifikáciu reflexnej metódy. V štruktúre takej optickej hlavice sa striedajú osvetľujúce a detekčné prvky, ktoré sú orientované smerom k hriadeľu riadenia. Výstupný signál môže byť analógový alebo impulzný. Zo série impulzov je možné detekovať aj informáciu o smere otáčania.
57 Optický kodér polohy hriadeľa Pre snímanie zmeny uhla natočenia a tiež aj rýchlosti tejto zmeny môže byť použitý prispôsobený optický kodér. S jeho využitím sa možno stretnúť v snímaní polohy hriadeľa riadenia, hnacieho hriadeľa, prípadne spojovacieho hriadeľa (snímanie rýchlosti pohybu vozidla). Optický kodér pozostáva z kruhového priesvitného disku, na ktorom sú nanesené alebo vyleptané výseky medzikruží, z ktorých sú niektoré priesvitné a iné nepriesvitné. Takáto sústava vzájomne posunutých výsekov medzikruží vytvára a poskytuje binárnu informáciu, ako je to zrejme z obr.
58 Optický kodér polohy hriadeľa Zdroj svetla Optické senzory LSB MSB Vodiaca tyč Kódovací disk Binárny kód Grayov kód
59 Optický zdroj a detektor sú umiestnené tak, aby bolo snímané jedno medzikružie, v ktorom sú priesvitné a nepriesvitné časti. Lineárnym usporiadaním sústavy detektorov vzniká na výstupe detektorov binárna informácia v závislosti od prechádzajúceho svetla. Tvar vzoru v medzikružiach môže priamo definovať kód binárneho údaja. V prípade prirodzeného binárneho kódu je uhol natočenia úmerný priamo hodnote tohto kódu. Problém prechodov medzi jednotlivými stavmi môže riešiť vzor disku usporiadaný v Gray-ovom kóde
60 Snímač uhla natočenia volantu ( typ používaný v koncerne VW) prenáša k riadiacej jednotke ABS s EDS/ASR/ESP údaj o uhle, o ktorý vodič otočil volant doľava alebo doprava. Snímač je schopný zachytiť uhol v rozmedzí ±720, to sú štyri úplné otočenia volantu. vratný krúžok so špirálovým vodičom
61 Meranie uhla natočenia volantu sa vykonáva na princípe svetelnej závory (opticko-elektrický signál). Základnými súčasťami sú: a zdroj svetla b kódovací kotúč c, d optické snímače e počítadlo úplných otáčok. Kódovací kotúč je tvorený dvoma prstencami - absolútnym a inkrementálnym (prírastkovým). Oba prstence sú snímané dvoma senzormi. b e c a d
62 Odporové potenciometre Pri odporových potenciometroch s bežcom sa meria pohyb alebo poloha využitím úmernej závislosti medzi dĺžkou vodiča alebo odporového filmu (vodivá dráha) a veľkosti jeho odporu. Táto skupina predstavuje najekonomickejšie senzory pohybu alebo uhla natočenia. Napätie je na meraciu dráhu zvyčajne privádzané cez menšie sériové odpory R v (zrejme z obr.), ktoré majú za úlohu ochranu, nastavenie nulovej polohy a nastavenie rozsahu výstupného napätia
63 Otočný potenciometer 1 bežec, 2 odporová dráha, 3 dráha kontaktu, U 0 napájacie napätie, U A merané napätie, R justovacie odpory, meraný uhol max 2 U R 3 0 U R V1 S I A A R 0 1 R RV2
64 Tvar obrysu odporovej dráhy definuje priebeh odporu, resp. výstupnej veličiny v závislosti od polohy bežca (charakteristika) Pripojenie bežca je bežne zabezpečené druhou kontaktnou dráhou z toho istého materiálu, ktorá je nanesená na substrát s malým odporom. Zvýšenie odolnosti voči skresleniu sa dosahuje minimalizáciou prúdu (I A < 1mA) a zapuzdrením, ktoré zamedzuje vnikaniu nečistôt.
65 Senzory so skratujúcim prstencom Tieto senzory pozostávajú z laminovaného jadra z magneticky mäkkého materiálu (U, E, tyčinky), cievky a pohyblivého prstenca z dobre vodivého materiálu (Cu, Al) (obr). Pripojením striedavého napätia na cievku tečie ňou prúd, ktorý je závislý od indukčnosti. Vírivý prúd, ktorý je indukovaný v prstenci obmedzuje nárast magnetického toku v oblasti medzi cievkou a prstencom. Poloha prstenca ovplyvňuje indukčnosť a tým aj prúd cievky (obr).
66 Senzor so skratujúcim prstencom I x Pohyblivý skratujúci prstenec L(x) I vírivý Cievka F (x) Jadro z magneticky mäkkého materiálu
67 Prúd I je tak mierou pozície vodivého prstenca. Dĺžka senzora môže byť navrhnutá podľa požiadaviek. Hmotnosť pohybujúceho sa prstenca je veľmi malá. Tvar jadra ovplyvňuje charakteristiku senzora. Znižovaním vzdialenosti medzi časťami magnetického obvodu smerom ku koncu zlepšuje linearitu senzora. Pracovná frekvencia striedavého napätia je v rozmedzí 5-50 khz (závisí od materiálu a tvaru jadra).
68 Diferenčné senzory Používajú pohyblivý prstenec a statický prstenec, ktorého poloha je referenčná (obr). Používajú sa pre dosiahnutie zvýšených nárokov na presnosť (vstrekovacie čerpadlá dieselových motorov, senzory uhla natočenia pre meranie množstva vstrekovaného paliva rozdeľovacieho vstrekovacieho čerpadla).
69 Pracujú ako indukčné napäťové deliče (obr) (vyjadrením L 1 L 2 alebo L 1 L2 L L alebo ako prvky, definujúce frekvenciu oscilátorov, v ktorých je výstupný signál úmerný frekvencii. Typicky je 1 2, L max L min 4
70 1 Diferenčný senzor 1 Referenčný prstenec (pevný) 2 Pohyblivý prstenec A/D Analógovo-číslicový prevodník SA Predspracovanie signálu SG Riadiaca Jednotka (ECU) 2. SA A D SG
71 Iné typy senzorov Senzory založené na zasúvaní piestu solenoidu a podobné indukčné senzory využívajú variácie indukčnosti jednotlivých cievok a vzťah úmery napäťového deliča (priamym pripojením alebo indukčnou väzbou) a pohybu jadier. Celková dĺžka je zvyčajne podstatne väčšia ako meraný posun. Tento problém sa potláča použitím viacerých vinutí umiestnených v sekciách s odlišnými rozmermi. Pri tých senzoroch, ktoré majú merať uhol natočenia sa musí mechanicky rotačný pohyb zmeniť na lineárne posunutie.
72 Senzory s VF vírivými prúdmi (elektronika v meracom bode) Sú vhodné napr. pre bezkontaktné meranie uhla natočenia škrtiacej klapky a pozície akceleračného pedálu. V týchto senzoroch je vo väčšine prípadov modifikovaná indukčnosť cievok s neferomagnetickým jadrom rôzne tvarovanými vodivými prvkami (spojlermi) alebo ich premenlivým prekrývaním. Pracovná frekvencia je rádovo MHz a tak je väčšinou elektronika prispôsobená senzoru.
73 Príkladom sú dve cievky, ktoré sú navinuté okolo spoločného valca (obr.), čím vytvárajú diferenčný senzor pre meranie uhla natočenia. Rovnaký princíp je použitý v senzoroch pre meranie pozície spojky (70mm rozsah 7,5kHz), v ktorých sú zakomponované laterálne (bočné) cievky. V prvom prípade je použitý špeciálny tvar Al valca. V druhom prípade sa monitoruje hĺbka zasunutia Al trubice do cievky senzora.
74 Senzor s VF vírivými prúdmi - senzor polohy pedálu 1 Spoiler skratovacia časť, Uhol natočenia, L 1, L 2 Indukčnosti semicylindrických cievok 1 L1 L2
75 Integrované obvody s Hallovou sondou Hallov jav je galvanomagnetický jav, ktorý vzniká a je využívaný hlavne v tenkých polovodičových čipoch. Keď takýto prvok, ktorým preteká elektrický prúd, je vystavený magnetickému poľu so siločiarami kolmými na smer prúdu, v smere kolmom na smer siločiar i smer prúdu sa objaví napätie, úmerné veľkosti magnetického poľa (obr) (Hallov jav). Súčasne narastá odpor tohto prvku, ktorý je parabolickou funkciou indukcie B (Gaussov jav, magneto rezistívny jav).
76 Galvanomagnetické javy B UR UH UH R B B B B UH Závislosť Hallovho napätia (Hallov jav) Závislosť odporu Gaussov jav
77 Ak je ako základný polovodič použitý Si, potom spolu s Hallovou sondou môže byť na jednom čipe vytvorený aj obvod pre spracovanie signálu z jej výstupu, čím sa takýto obvod stáva ekonomický. Nevýhodou býva citlivosť na mechanické pnutia (otrasy, rôzna rozpínavosť látok) ktorým sa nedá zabrániť v dôsledku zapuzdrenia, a ktoré vedú k nežiaducim zmenám teplotného koeficienta. Tento nedostatok môže byť potlačený zavedením tzv. rotujúcich prúdov. Tým sa dosahujú lepšie výsledky pri IO s Hallovou sondou v analógových senzoroch.
78 Mechanické interferencie (piezorezistívny jav) sú potlačené rýchlym elektronicky riadeným prepínaním elektród, čím sa vytvára rotácia prúdu. Výsledná hodnota veličiny sa získa ako priemer čiastkových hodnôt výstupného signálu (obr). Tieto IO s Hallovou sondou (HS) sú vhodné hlavne pre meranie pohybu v obmedzenom rozsahu. Vyhodnocujú pokles alebo zmenu intenzity magnetického poľa permanentného magnetu ako funkciu jeho vzdialenosti od IO.
79 Princíp Hallovho senzora so spínanými prúdmi Fáza rotácie 1 I I 1 Polovodičový čip 2 Aktívna elektróda 3 Pasívna elektróda I Budiaci prúd U H Hallové napätie I U H Fáza rotácie 2 = I U H
80 Použitím konfigurácie podľa obr. sa môžu merať uhly až do 360 (poloha vačkového hriadeľa). Dve HS, ktoré sú usporiadané kolmo na seba, poskytujú na svojich výstupoch sínusový a kosínusový signál. Tieto môžu byť funkciou arctan prepočítané na uhol otočenia. Principiálne môže byť daná konfigurácia realizovaná aj v planárnej forme (VHD- Vertical Hall Devices).
81 Analógový Hallový senzor pre otočenie o 360 I B x Postavený z diskrétnych Hllových IO U x S By U y B J 2 3 Postavený z planárne integrovaných Hllových IO B S 1 Elektronika spracovania signálov 2 Otočný hriadeľ 3 Riadiaci magnet U A 1 J 3 2
82 Podobne je možné merať väčšie uhlové odchýlky pomocou rotujúceho magnetické prstenca, ktorý je obopínaný nepohyblivým prstencom z magneticky mäkkého materiálu (obr). Výstupná charakteristika je lineárna v širokom rozsahu uhlov (obr). V takej konfigurácii aká je na obr. môže magnetické pole prstenca pretínať HS v oboch smeroch (bipolárne), pričom magnetický tok je formovaný prídavnými prvkami. Nevýhodou tohto riešenia je trvalá závislosť na geometrických toleranciách magnetického obvodu a fluktuáciách intenzity mag. poľa magnetu.
83 Hallový senzor uhla natočenia s lineárnou charakteristikou Pozícia a 1 Magnetický tok 2 Stator (1, 2 Magneticky mäkký materiál) 3 Rotor (Permanentný magnet) 4 Vzduchová medzera 5 Hallový senzor Uhol otočenia Pozícia b Výstupný signál Poz.a Poz.b -90 o 0 o +90 o 180 o
84 Medzi najjednoduchšie IO s HS patria spínače na báze Hallovho javu. Dovoľujú konštrukciu digitálnych senzorov uhla natočenia do 360, použitím malých bodových magnetov (obr). V tejto konfigurácii je pre n-bitovú rozlišovaciu schopnosť potrebných n Hallových spínačov, ktoré sú rovnomerne rozmiestnené v kruhu. Kódový disk, ktorý je vyrobený z magneticky mäkkého materiálu blokuje (cloní) alebo prepúšťa magnetické pole vytvárané permanentnými magnetmi.
85 Digitálny Hallový senzor uhla natočenia s 360 rozsahom 1 1 Kryt s permanentnými magnetmi 2 Kódový disk (magneticky mäkký materiál) 3 Doska s Hallovými spínačmi 2 3
86 Tvar kódového disku odpovedá výstupnému kódu a rozmiestneniu Hallových spínačov. Ak sa senzor aplikuje pri snímaní uhla natočenia riadenia (volantu), je pre prípad viacnásobných otáčok možné použiť prevod do pomala. Rozlíšenie takejto konfigurácie býva lepšie ako 2,5
87 Senzory budúcnosti Magnetorezistívne Ni-Fe tenkovrstvové senzory (AMR-anizotrópne magnetorezistívne tenkovrstvové Ni-Fe, Permaloy) Dovoľujú extrémne kompaktnú konštrukciu bezkontaktných senzorov uhla natočenia. Substrátom sú oxidované silikónové vrstvy, súčasťou ktorých môžu byť aj obvody spracovania signálov. Riadiace magnetické pole je zvyčajne vyrábané magnetom, ktorý je umiestnený nad senzorom (obr) ( holičská palica-barber s pole )
88 Magnetorezistívny senzor merajúci uhol natočenia (konfigurácia holičskej palice) 1.AMR, anizotropný magnetorezistívny prvok (holičská palica) 2. Rotujúci permanentný magnet 3. krivka odpovede pre nízku, 4. vysokú pracovnú teplotu. a lineárny, b efektívny merací rozsah. meraný uhol, U A merané a U 0 referenčné napätie 100 mv UA-U0/ U 0 B U A a b
89 Táto konfigurácia je limitovaná tak v presnosti ako aj v rozsahu (max ±15 ). Činnosť je založená na rozvažovaní magnetorezistivného napäťového deliča, ktorý pozostáva z longitudiálnych permaloyových rezistorov a postranných dobre vodivých prúžkov (Au) (obr).
90 Magnetorezistívny senzor uhla natočenia v pseudohallovej konfigurácii Využíva inherentnú (vnútorne danú) vlastnosť sínusového tvaru signálu, ktorý je snímaný na výstupoch štvorpólovej planárnej štruktúry (obr). Druhý prvok, pootočený o 45 poskytuje doplnkový signál v tvare kosínusu. Zo vzájomného pomeru týchto dvoch signálov (napr. arctan) je možné určiť uhol natočenia (mikroprocesor) s vysokou presnosťou a rozsahom väčším ako 180, bez ohľadu na fluktuácie teploty alebo intenzity mag. poľa (stárnutie, vzd.)
91 Magnetorezistívny senzor merajúci uhol natočenia (pseudo-hallová konfigurácia) 1 2 Spôsob merania B U H1 U H2 1.Tenká NiFe vrsrva (AMR senzor), 2. Permanentný magnet s indukciou B 3.Hybrid, 4.ASIC, 5.Konektor. I V - Zdroj prúdu, U H1,U H2 -Merané napätie, -Meraný uhol I V I V o Štruktúra senzora 2 S J
92 Meranie rôznych rotácií (napr. hriadeľ riadenia) môže byť realizované dvomi pseudohallovými senzormi a dvomi permanentnými magnetmi podľa obr. Permanentné magnety sú upevnené na dvoch ozubených kolesách s prevodom zvyšujúcim otáčky, ktoré sa líšia v počte zubov o jeden zub. Ich vzájomný fázový posun je mierou absolútneho posunutia (obr). Každý individuálny senzor poskytuje uhlovú informáciu so zvýšenou presnosťou. Táto konfigurácia poskytuje presnosť vyššiu ako 1 aj pri štyroch otáčkach hriadeľa.
93 AMR senzor uhla natočenia riadenia 1.Tyč riadenia 2.Ozubené koleso s n>m zubami 3.Ozubené koleso s m zubami, 4.Ozubené koleso s m+1 zubami 5.Magnety,, - Uhly pootočenia
94 Senzory merania vzdialenosti medzi vozidlami V systémoch pre monitorovanie vzdialenosti medzi vozidlami môžu byť použité ako ultrazvukové metódy (v rozsahu 0,5-5m), tak aj metódy pre meranie v infračervenej oblasti (Lidar: do 50m) alebo rádiovej oblasti (~ 150m), v ktorých sa najčastejšie uplatňuje meranie doby odozvy. ACC (Adaptive Cruis Control) systémy s takými radarmi sú vlastne riadiace systémy, ktoré riadia a dohliadajú na rýchlosť vozidla, detekujú iné objekty a prekážky pred vozidlom v smere jeho pohybu a aktivujú brzdiace systémy (v prípade potreby)
95 Pracovná frekvencia týchto radarov je v pásme 76 GHz ( =3,8cm), čo dáva predpoklad pre stavbu kompaktných systémov automobilových aplikácií. Ako budič sa používa Gunnov oscilátor (oscilátor s Gunnovou diódou umiestnenou vo vlnovodovom rezonátore), ktorý budí tri paralelne pracujúce patch (plošné) antény (obr). Tieto pracujú súčasne ako vysielacie aj ako prijímacie antény odrazeného signálu. Súčasťou antén sú aj plastové Fresnelové šošovky, ktoré tvarujú vyžarovací diagram do priestoru pred vozidlom ±5 v horizontálnom smere a ±1,5 vo vertikálnom smere. V dôsledku postranného ofsetu antén je prijímacia charakteristika mierne odlišná (6dB šírka ±4 ).
96 Analógová časť ACC - senzora (bloková schéma) +8V napájanie Napätím riadený oscilátor Harm. zmiešavač Dielektrický rezonátor FLL-ASIC Riadenie frekvencie Signál zapínania Gunnovho oscilátora Vstupné pílovité riadiace napätie Monitorovanie frekvencie Mikrovlnový obvod 12,65 GHz 3-kanálový predzosilňovač ASIC V napájanie Signál radaru, ľavý Signál radaru, centrálny 2 Signál radaru, pravý Šošovka Cirkulátory Budenie antén Zmiešavače Zem
97 Tieto systémy sú schopné detekovať vzdialenosť objektu nachádzajúceho sa pred vozidlom, zistiť jeho rýchlosť a smer a tiež jeho pozíciu pred vozidlom. Vysielané a prijímané signály oddeľujú smerové väzobné prvky (obr). V troch zmiešavačoch sa VF signál konvertuje smerom dolu na rozsah 0-300MHz. Signál s nízkou frekvenciou je digitalizovaný a spracovávaný metódami číslicového spracovania signálov (frekvenčná analýza a pod.).
98 Frekvencia oscilátora s Gunnovou diódou je kontinuálne porovnávaná s frekvenciou stabilného oscilátora (DRO-Dielectric Resonance Oscilator) a nastovaná na vopred stanovenú hodnotu. Zmena frekvencie Gunnovho oscilátora sa dosahuje zmenou napájacieho napätia (obr.). Gunnov oscilátor je rozmietaný každých 100ms v rozmedzí 300MHz pílovitým signálom, čím sa optimalizuje meranie (FMCW- Frequency Modulated Continuos Wave) (obr.).
99 Signál odrazený od vozidla od objektu spred vozidla je oneskorený o čas potrebný na prekonanie dvojásobnej vzdialenosti medzi vozidlom a objektom. Rozmietaný vysielaný a prijímaný signál tým, že sú časovo posunuté, majú v jednom okamihu aj odlišné frekvencie. Frekvenčný rozdiel Df je tak mierou vzdialenosti (napr. 2kHz/m). Ak sa však objekty vzájomne voči sebe pohybujú, potom je frekvencia prijímaného signálu (ako to vyplýva z Dopplerovho javu) zmenená úmerne charakteru charakteru vzájomného pohybu. (napr. 512 Hz/ms -1 ).
100 Je treba mať na zreteli dve odlišné zmeny frekvencie Df 1 a Df 2. Ich súčet poskytuje informáciu o vzdialenosti a ich rozdiel o vzájomnej relatívnej rýchlosti (obr.). Meracie systémy sú pomocou tejto metódy schopné merať a definovať dráhu až 32 vozidiel naraz. Senzory magnetického poľa Môžu byť použité pre monitorovanie smeru pohybu všeobecne a môžu nájsť uplatnenie v navigačných systémoch. V súčasnosti sa pre tieto účely v dosť širokom rozsahu uplatňuje GPS (Global Position System).
101 Meranie vzdialenosti a rýchlosti FMCW radarom f/ghz 76,3 Δf Δf 1 Δf 2 Δf f e Δf d 76,0 f s f e f s Vysielaná frekvencia f e Prijímaná frekvencia bez relatívnej rýchlosti f e Prijímaná frekvencia s relatívnou rýchlosťou Df d Zvýšenie frekvencie Dopplerovým javom Df Diferencia frekvencií bez relatívnej rýchlosti Df 1,2 Diferencia frekvencií s relatívnou rýchlosťou Čas
102 Senzory otáčok, rýchlosti, zrýchlenia
103 Senzory otáčok a rýchlosti Treba rozlišovať medzi absolútnou rýchlosťou otáčania v priestore a relatívnou rýchlosťou vzájomného otáčania sa dvoch častí. Príkladom absolútnej rýchlosti otáčania je rýchlosť vybočenia vozidla (Yaw) vzhľadom k vertikálnej osi (informácia potrebná pri riadení dynamiky vozidla). Príkladom relatívnej rýchlosti otáčania sú otáčky kľukového alebo vačkového hriadeľa, otáčky kolies (ABS/TCS) a otáčky palivového čerpadla.
104 Pri meraní sa uplatňujú hlavne inkrementálne senzorové systémy, ktorých súčasťou sú ozubené prevody a senzory otáčok. Novšie aplikácie: v ložiskách integrované senzory otáčok (ložiská kolies, moduly tesnenia mazaniasimmerringy kľukových hriadeľov), lineárna rýchlosť, rýchlosť otáčania okolo vertikálnej resp. pozdĺžnej osi (ochrana pred prevalením).
105 Indukčné senzory Indukčné senzory sa skladajú z permanentného magnetu tvaru tyčinky, z tyčinky z magneticky mäkkého materiálu a z cievky. Tyčinka z magneticky mäkkého materiálu ovplyvňuje indukčnosť cievky (obr.). Ak sa ozubené koleso z feromagnetického materiálu otáča, jeho zuby menia magnetický tok v tyčinke a tým aj v cievke. Zmeny magnetického toku indukujú napätie v cievke.
106 Indukčný senzor otáčok Permanentný magnet 2. Ochranný kryt 3. Jadro z magneticky mäkkého materiálu 4. Vinutie cievky 5. Ozubené koleso (oceľ) s referenčným bodom 3 4
107 Pravidelný tvar zubov, ktoré majú rovnakú šírku ako medzery vytvára zabezpečuje, že indukované napätie je sínusového priebehu. Rýchlosť otáčania sa vplýva na frekvenciu, resp. periódu signálu ale aj na jeho amplitúdu. Dôležitými faktormi, ktoré definujú amplitúdu signálu sú tvar zubov a vzduchová medzera (exponenciálna závislosť). Bez väčších ťažkostí môžu byť detekované zuby ak vzduchová medzera dosahuje 1/3 až 1/2 intervalu zubov.
108 Pri štandartných ozubených kolesách pre snímanie polohy kľukového hriadeľa a otáčania kolies pre ABS dosahuje medzera hodnoty 0,8 1,5mm. Zisťovanie referenčnej polohy napr. pre zapaľovanie sa zabezpečuje buď vynechaním jedného zuba, alebo premostením dvoch susedných zubov. V snímanom signále to vykazuje výraznú, ktorá je detekovaná a anlýzovaná ďalšími elektronickými obvodmi.
109 Senzory založené na Hallovom jave s lopatkovými prerušovačmi Najčastejšie sa používajú pre časovanie zapaľovania a distribúciu energie zapaľovania pre jednotlivé valce. Samotný senzor je často integrovaný aj s elektronikou pre spracovanie v jednom čipe. Takýto Hallový IO (Integrovaný obvod, vyrobený bipolárnou technológiou, určený pre použitie až do teploty 150 C a pripojený priamo na elektrický systém )
110 je umiestnený spolu s magnetickým obvodom a je magneticky odizolovaný od okolia. Magnetický obvod pozostáva z permanentného magnetu a pólových nástavcov (obr.). Prerušovačom je lopatka z magneticky mäkkého materiálu, ktorá je spojená napr. s vačkovým hriadeľom. Táto lopatka prechádza pri rotácii vzduchovou medzerou a tak preruší magnetický tok, ktorý inak pretína Hallovú sondu (obr.). V systémoch, ktoré sú použité pre distribúciu elektrickej energie pre zapaľovanie sa namiesto lopatiek používa vhodne tvarovaný disk z mag. mäkkého materiálu.
111 Lopatkový spínač s Hallovým prvkom (rozdeľovač zapaľovania) 2 J S U S J S U 0 1. Lopatka so šírkou b 2. Magnetický obvod z magneticky mäkkého materiálu 3. Integrovaný obvod s Hallovým prvkom 4. Vzduchová medzera U 0 Napájacie napätie, U s napätie senzora b
112 Novšie senzory Nové senzory a senzory budúcnosti budú musieť splniť tieto kritéria: statické monitorovanie (nulové otáčky), väčšie vzduchové medzery, nezávislosť od fluktuácií vzduchových medzier (odolnosť voči zmenám teploty do 200 )
113 Gradientné senzory Gradientné senzory (pracujúce napr. ako Hallové diferenciálne alebo magnetorezistívne diferenciálne) obsahujú permanentný magnet, ktorého účinky sú homogenizované feromagnetickou doštičkou (obr.). Vo vzdialenosti 1/2 periódy zubov sú umiestnené dve Hallové sondy (HS,využívajúce Hallov jav alebo magnetorezistívny jav), čím je vždy jedna HS v medzere medzi zubami a a druhá oproti zubu (obr.).
114 Diferenciálny magnetorezistívny senzor (radiálny) 1 j J S R 2 R 1 U 0 U A (j) 1. Magnetorezistor R 1,R 2 2. Magnetický substrát z magneticky mäkkého materiálu 3. Permanentný magnet 4. Ozubené koleso U 0 Napájacie napätie, U A (j) napätie senzora
115 Senzor vyhodnocuje veľkosť intenzity magnetického poľa, ktorá pôsobí na tieto dve HS. Tým je výsledná informácia takmer nezávislá od veľkosti vzduchovej medzery. Magnetorezistory (Gaussov jav) sú magneticky riadené polovodičové odpory (InSb), na ktoré môže podobne ako pri HS premenlivo pôsobiť magnetické pole (obr.). Bežne je odpor magnetorezistora kvadratickou závislosťou intenzity mag. poľa. Dva rezistory môžu byť zapojené ako napäťový delič (použiteľnosť magnetorezistorov je do C).
116 Tangenciálne senzory Tangenciálny senzor sa líši od gradientného reakciou na variácie resp zmeny polarity a veľkosti tangenciálnych zložiek intenzity magnetického poľa vzhľadom k obvodu rotora. Návrh predpokladá použitie AMR (anizotropna magnetorezistívna) tenkovrstvovú technológiu (barber s pole) alebo jednotlivé permaloyové rezistory, zapojené ako súčasti mostíka.
117 Tangenciálne senzory nemusia byť prispôsobené rozstupu zubov kolesa (obr.). V prípade realizácie senzora pre umiestnenie v ložisku (priestor pre tesnenie mazania) je AMR umiestnený spolu s IO pre spracovanie signálu. V snahe šetriť priestor a chrániť IO pred teplom môže byť byť umiestnený (IO) kolmo na čidlo a čím ďalej od zdroja tepla.
118 AMR senzor (tangenciálny) 1. Ozubené koleso (Fe) 2. Permanentný magnet 3. Magnetorezistory R 1,R 2 (Permaloy, tenkovrstvový) B riadiace magnetické pole s tangenciálnou zložkou B t a radiálnou zložkou B r (Východzia pozícia B t =0), j Uhol pootočenia U 0 Napájacie napätie, U A napätie senzora B B t B r B R 1 R 2 j B J U 0 U A S
119 Oscilačné gyrometre Oscilačné gyrometre merajú absolútnu rýchlosť otáčania sa vozidla okolo vertikálnej osi (yaw rate). Tento údaj sa používa napr. v systémoch pre riadenie dynamického správania sa vozidla (ESP- Electronic Stability Program) a pri navigácii. V princípe sú obdobné ako mechanické, ktoré využívajú Coriolisove zrýchlenie. To sa vyskytuje pri rotačnom pohybe v spojitosti s kmitavým pohybom.
120 Piezoelektrický senzor rýchlosti vybočenia Dva piezokeramické senzory (1-1 ), ktoré ležia presne oproti sebe, generujú v rezonančnom dutom valci radiálne rezonančné oscilácie (obr.). Druhý piezoelektrický pár (2-2 ) udržiava konštantnú amplitúdu oscilácií valca so 4- mi uzlami kmitania (potočené o 45 vzhľadom k pozícii budenia). Poloha uzlov odpovedá rýchlosti otáčania W okolo osi rezonančného valca.
121 Piezoelektrický senzor otáčania (Princíp činnosti) Piezoelektrické prvky 8. Riadiaca jednotka (konštantná fáza) 9. Pásmový priepust 10.Signál s referenčnou fázou 11.Usmerňovač synchrónny detektor U A napätie senzora merané, W Uhlová rýchlosť, U ref =0 (normálna prevádzka), U ref 0 (zabudovaný test) W U ref U A
122 Mierne sa môže posúvať a taktiež sa tým môže meniť silové pôsobenie v miestach pôvodnej polohy uzlov (v pokoji sily nepôsobia). Tento stav je monitorovaný tretím párom piezoelektrických prvkov (obr.). Signál o silách je porovnávaný s referenčnou hodnotou U REF =0 a 4-tým párom sú v spätnoväzobnej slučke znovu generované sily pre doladenie (obr.). Po precíznej filtrácii použitím synchrónneho detektora (fázovo riadené usmerňovanie) je výsledkom extrémne presná požadovaná hodnota signálu.
123 Nastavením U REF 0 umožňuje jednoduchú kontrolu časových zmien. Pre potlačenie teplotných vplyvov sú potrebné zložité kompenzačné obvody. Taktiež je potrebné prijímať opatrenia na potlačenie vplyvov starnutia, na ktoré sú náchylné piezoelektrické prvky. Výsledná konfigurácia gyroskopu je na obr.
124 Piezoelektrický senzor uhlovej rýchlosti (štruktúra) W Piezoelektrické páry prvkov 5. Oscilačný valec 6. Základná doska pätica, 7. Pripájacie kolíky W Uhlová rýchlosť, 5 6 W 7
125 Mikromechanický senzor uhlovej rýchlosti s dvojitou ladičkou Základnou časťou snímača uhlovej rýchlosti je mikromechanický systém s dvojitou ladičkou z monokryštalu kremíka, ktorý je umiestnený na malom elektronickom diele na doštičke snímača. Na obr. Je zjednodušené zobrazenie dvojitej ladičky. V oblasti pása je spojená so zvyšným kremíkovým prvkom (kvôli prehľadnosti vynechaný. Systém je tvorený budiacou ladičkou a mernou ladičkou.
126 Mikromechanický systém s dvojitou ladičkou kmitanie budiaca ladička kmitá striedavé napätie s frekvenciou 11 khz merná ladička sa nerozkmitala krútiaci moment
127 Funkcia Privedením striedavého napätia sa ladička rozkmitá. Dvojitá ladička je konštruovaná tak, aby sa budiaca ladička rozkmitala pri frekvencii 11 khz (presne) a merná ladička pri frekvencii 11,33 khz. Ak je na dvojitú ladičku privedené napätie s frekvenciou presne 11 khz, rozkmitá sa budiaca ladička, kým merná ladička nie. Kmitajúca ladička reaguje na pôsobenie sily pomalšie, než hmota, ktorá nekmitá.
128 Tým, že sa merná ladička a zvyšok snímača rotačnej rýchlosti spolu s vozidlom pôsobením otáčavého zrýchlenia pohybuje, budiaca ladička za týmto pohybom zaostáva. Tým sa dvojitá ladička skrúti do tvaru skrutkovice. Toto skrútenie spôsobí zmenu v rozdelení nábojov v ladičke, čo je merané elektródami a vyhodnocované elektronickými komponentmi snímača rotačnej rýchlosti
129 Radarové senzory Výskum sa zameriava hlavne na lacné radarové systémy, ktoré využívajú Dopplerov jav pre meranie lineárnej rýchlosti vozidiel. (Bližšie v iných častiach)
130 Senzory akcelerácií a vibrácií Tieto senzory sú vhodné pre spúšťanie systémov ochrany a bezpečnosti pasažierov (airbagy, predpínače bezpečnostných pásov,...), pre detekciu klepania, riadenie motorov s vnútorným spaľovaním, pre registrovanie bočného zrýchlenia a zmien rýchlosti štvorkolesových vozidiel vybavených ABS.(TAB)
131 Aplikácia Rozsah Monitorovanie klepania 1 10g Bezpečnosť pasažierov Airbagy, predpínanie pásov 50g Pretočenie 4g Blokovanie samonavíjacích pásov 0,4g ABS, ESP 0,8 1,2g Riadenie zavesenia Karoséria 1g Nápravy 10g
132 Akceleračný senzor využívajúci Hallov jav Vo štvorkolesových vozidlách vybavených ABS a v moderných vozidlách s riadením dynamiky sú senzory otáčania kolies doplnené senzormi akcelerácie založené na Hallovom jave, ktoré monitorujú zrýchlenie v pozdĺžnom a priečnom smere. Hallový senzor zaznamenáva vychýlenie magnetu, ktorý je upevnený na pružine (merací rozsah 1g). Senzor je navrhnutý pre činnosť v úzkom frekvenčnom rozsahu (niekoľko Hz) a je elektrodynamicky tlmený (obr.)
133 Hallov akceleračný senzor U H= const.a 1. Hallov senzor 2. Permanentný magnet (seizmická hmota) 3. Pružný nosník 4. Tlmiaca doštička (Cu) a Akcelerácia, I W Vírivé prúdy, F Magnetický tok, U H Hallovo napätie, U 0 Napájacie napätie 1 S J U a 4 I w
134 Piezoelektrické senzory Pre spúšťanie airbagov a predpínačov pásov atď. sa používajú piezoelektrické bimorfné pružné elementy (dvojvrstvová piezokeramika) (obr.). Hybnosť vlastnej hmoty v dôsledku akcelerácie spôsobuje vychýlenie pružných elementov, čo vytvorí signál s dobrou frekvenčnou charakteristikou.
135 Piezokeramický akceleračný senzor U A =0 1 a=0 V pokoji bez zrýchlenia 1. Piezokeramický bimorfný pružný prvok, U A Merané napätie, U A 0 1 a Pôsobením zrýchlenia
136 Senzor je hermeticky zapuzdrený spolu aj s predzosilňovačom. Niekedy je umiestnený v géle kvôli ochrane pred mechanickým poškodením. Reciproký princíp môže byť použitý pre kontrolu senzora. Na to je však pridaná ďalšia elektróda, na ktorú sa privádza definované napätie, ktoré spôsobuje mechanickú deformáciu senzora, čím sa kalibruje jeho odozva.
137 Longitudiálne prvky Longitudiálne prvky sú používané ako senzory klepania (akceleračné senzory) v systémoch riadenia zapaľovania. Merajú ruchy (s nízkou smerovou selektivitou) prenášané blokom motora (merací rozsah 10g) s typickou frekvenciou vibrácií 5-20 khz. Nezapúzdrený radiálny piezokeramický prstenec meria inerciálne sily vyvíjané seizmickou hmotou. toho istého tvaru (obr.).
138 Piezoelektrický senzor klepania Seizmická hmota 2. Zalievacia hmota 3. Piezokeramický prvok 4. Kontakty 5. Konektor - vývod 3 4 5
139 Kremíkový polovodičový senzor Vyrábajú sa mikromechanickými technológiami selektívneho leptania z monokryštálu kremíka. Precízne definovaná medzera medzi jednotlivými časťami oscilačného systému, ktorý je hermetický zapuzdrený poskytuje presný a kompaktný senzor, v ktorom je informačnou veličinou elektrická kapacita (obr.).
140 Kompaktný kremíkový snímač zrýchlenia 1 2 a C 1-2 C Kremíkový vrchný plátok 2. Kremíkový stredný plátok (seizmická hmota) 3. Oxid kremíka 4. Kremíkový spodný plátok 5. Sklenená podložka a - Zrýchlenie, C Meracie kapacitory
141 Senzory tlaku, sily, krútiaceho momentu
142 Senzory tlaku Meranie tlaku sa realizuje priamo (odpormi citlivými na tlak), vyhodnocovaním prehnutia membrány alebo silovými senzormi (obr.). Aplikácie: tlak v nasávacom potrubí (1-5bar), tlak v brzdiacom systéme (10bar)-elektro pneumatické brzdy, tlak pneumatického pruženia (16bar)- vozidlá s pneumatickým pružením a tlmením,
143 tlak v pneumatikách (5bar)-monitorovanie a nastavovanie tlaku, tlak v hydraulickom zásobníku ( 200bar)- podvozok a riadiaci systém zavesenia, tlak chladiacej sústavy klimatizácie (35bar), tlak modulátora automatickej prevodovky (35bar), tlak v hlavnom brzdiacom valci a vo valčekoch na kolesách (200bar)- kompenzácia momentu vybočenia, elektronicky riadené brzdy,
144 podtlak alebo pretlak v palivovej nádrži (0,5bar)-on board diagnostika, tlak v spaľovacom priestore (100bar dynamicky) - kontrola správnosti časovania zapaľovania a detekcia klepania, tlak dieselového vstrekovacieho čerpadla (1000bar-dynamicky), common-rail (systémy so spoločným vstrekovaním) (100bar) pre zážihové motory alebo motory na plyn.
145 a Meranie tlaku b 3 1 p c 2 p p a) Priame, Resistorom citlivým na tlak (3), b) Silovým senzorom (1) c) Deformáciou membrány s tenzometrami (2) p - tlak
146 Hrubovrstvový senzor tlaku Meracia membrána a jej napínaný merací tenzometrické rezistory (DMS) používajú hrubovrstvovú technológiu na meranie absolútneho tlaku približne do 20bar s K faktorom (K relatívna zmena odporu/roztiahnutie) K=12 15 (obr.).
147 Hrubovrstvový senzor tlaku 1 2 p Piezorezistívny merací môstik, 2. Hrubovrstvová membrána, 3. Referenčná komora tlaku ( bublina ), 4. Keramický substrát, p - tlak
148 Ak sú koeficienty rozťažnosti keramického substrátu a nanášanej keramickéj vrstvy vhodne zvolené, potom membrána v procese chladnutia pri výrobe vytvára guľovitý tvar. Výsledkom je dutý priestor so zakrivením asi 100mm na výšku pri priemere 3-5mm (obr.). Po nanesení tenkovrstvového napínaného meracieho odporu je jednotka hermeticky zapuzdrená iným plášťom z keramického skla. Zbytkový plyn, ktorý zostal v bubline plní funkciu čiastkovej kompenzácie teplotných zmien senzora
149 Zosilňovacie a korekčné obvody sú oddelené od meracieho média, ale sú v blízkosti senzora na tom istom substráte. Bublinové senzory nie sú principiálne príliš vhodné pre extrémne vysoké alebo nízke tlaky, verzie pre také aplikácie vo všeobecnosti disponujú plochou keramickou membránou.
150 Polovodičové senzory tlaku Tlak je vyvíjaný v smere proti Si membráne, v ktorej sú zakomponované rezistory citlivé na tlak (obr.). Celý systém je vyrobený mikromechanickou technológiou. K- faktor rezistorov, ktoré sú difundované do monokryštálu Si je zvlášť vysoký (typicky K=100). Senzor a hybridný obvod spracovania signálu z neho by mali byť umiestnené v jednom puzdre.
151 Kalibrácia a kompenzácia senzora môže byť spojitá alebo po krokoch a môže byť realizovaná v tom istom čipe alebo v odlišných čipoch (hybridne). V najnovších senzoroch sú korekcie ofsetu a vplyvu prívodov uchované v digitálnej forme v PROM pamäti. Jednočipové senzory s plnou elektronickou kalibráciou sú vhodné v dôsledku ich minimálnych rozmerov pre priamu inštaláciu do nasávacieho potrubia. Taktiež sú vhodné pre monitorovanie tlaku v pneumatikách (bezkontaktné meranie).
152 Polovodičový senzor tlaku R 1 R 1 R R 2 R 1 R 1 U A R 2 U 0 1. Kremík, 2. Vákuum, 3. Sklo (tvrdené bórokremičitanové), p - tlak, U 0 -Napájanie, U A -Merané napätie, R 1 (napínaný) a R 2 (stláčaný) odpor tenzometrického mostíka
153 Virtuálne identický čip by mohol byť použitý ako senzor tlaku v spaľovacom priestore. To je realizované tak, že Si čip nie je priamo vystavený vysokej teplote (600ºC). Používa sa pri tom kovová izolačná membrána s prispájkovaným prenosovým elementom primeranej dĺžky (niekoľko mm) zabezpečujúcim vhodnú ochranu. Pre aplikáciu miniatúrnej základnej doštičky na stred membrány sa využívajú mikromechanické technológie. (obrázok) Takáto vzdialená inštalácia zabezpečí expozíciu čipu teplotou nižšou ako 150ºC.
154 Integrovaný kremíkový senzor tlaku v nasávacom potrubí Bondovacie prívody, 2. Referenčné vákuum, 3. Sklenené priechodky a kontakty, 4. Čip senzora, 5. Sklenený podstavec, 6. Kryt, 7. Prívod tlaku, p - tlak, p 7
155 Integrovaný kremíkový senzor tlaku v spaľovacom priestore F Tyčinka - prenášač sily, 2. Kremíková podložka (vstup sily), 3. Integrovaný kremíkový senzor tlaku, 4. Sklo (tvrdené bórokremičitanové), 5. Pomocná keramická podložka, 6. Oceľová základná doštička, 7. Prívodný kontakt, F - Sila tlaku spaľovacej komory, 6 7
156 Piezoelektrické senzory Umožňujú dynamické meranie tlaku. Ich určenie zvyčajne je na meranie tlaku v elektronicky riadených vstrekovacích dieselových čerpadlách. Určujú okamih otvárania a uzatvárania čerpadla vyhodnocovaním tlaku na pumpujúci element. Senzor pozostáva z tenkej membrány, ktorou sa priamo alebo nepriamo prenáša tlak na valcový alebo štvorhranný piezokeramický prvok. (obr.)
157 Keďže v danej aplikácii nie je prvoradým aspektom presnosť, sú prípustné určité odchýlky spôsobené teplotou, hysteréziou a stárnutím. Predpokladom zosilňovača je vysoká vstupná impedancia a je často namontovaný na puzdre, čím sa znižuje chyba merania.
158 Piezoelektrický senzor tlaku v nasávacom potrubí P U A 4 1. Kovový plášť, 2. Piezoelektrický disk, 3. Izolácia, 4. Puzdro, p - tlak, U A - Merané napätie
159 Senzory vysokého tlaku s kovovou membránou Meranie extrémne vysokého tlaku je žiadúce napr. v common rails dieselových vstrekovacích systémoch, kde sa údaj používa v uzavretej riadiacej slučke. V týchto senzoroch je membrána vyrobená z vysoko kvalitnej pružinovej ocele, pričom sa využíva zmena odporu polykryštalického kremíka prehýbaním, podobne ako pri tenkovrstvových senzoroch (obr.), čím sa získajú oveľa lepšie charakteristiky senzora, ako pri tých (tenkovrstvové polovodičové), ktoré sú určené pre monitorovanie tlaku v nasávacom potrubí
160 Vysokotlakový senzor s kovovou membránou p (Rozmery meracieho prvku a častí 1-4 sú neproporcionálne) 1. SiNx pasivácia, 2. Zlatý kontakt, 3. Tenzometrické prvky z polykrištalického kremíka, 4. Izolácia SiO 2, 5. Oceľová membrána, p - tlak.
161 Tieto jednotky: používajú jednoduchú a lacnú konštrukciu pre odizolovanie meraného média, líšia sa od kremíkových (polovodičových) vyššou odolnosťou voči prasknutiu, jednoduchšie sa montujú na kovové konštrukčné časti.
162 Izolované naparené (vákuové naparovanie) tenkovrstvové metalické, na ohyb citlivé rezistívne prvky (K=2) ako aj prvky vyrobené z polykryštalického kremíka (K=40) dávajú senzorom vysokú presnosť. Kalibrácia a kompenzácia sa môže realizovať v ASIC-obvode, ktorý je integrovaný spolu s potrebnou ochranou proti rušeniu.
163 Senzory sily a krútiaceho momentu Magnetoelastický senzor s orientovaným valčekom Je založený na magnetoelastickom princípe. Dutý väzobný valček obsahuje cievku, ktorá zviera 90º uhol s meracou cievkou. Ak na valček nepôsobia sily, meraciu cievku nepretína magnetický tok (obr.). Ak však vo valčeku vzniká anizotropia v dôsledku pôsobenia síl, magnetický tok úmerný silám pretína meraciu cievku, v ktorej sa indukuje napätie. Zosilňovač a napájanie sú integrované v čipe a sú umiestnené vo vnútri valčeka.
164 Magnetoelastický senzor v ložiskovom čape A E A E 2 A 1 E J S J S 1. Primárne vinutie (budenie), 2. Sekundárne vinutie (meraný signál), 3. Povrch primárneho pólu, 4. Povrch sekundárneho pólu
165 Koncepcie nových senzorov princíp vírivých prúdov: torzný senzor, pružiny na meranie radiálneho a axiálneho skrútenia (torzie), radiálny axiálny disk so štrbinami a cievkou, meranie stláčanými a napínanými rezistormi (tezometre), zalisované alebo zavarené senzory, senzory magnetoelastickej sily,
166 Nové aplikácie meranie väzobných síl na komerčných vozidlách medzi ťahačom a prívesom pre riadenie brzdenia meranie síl tlmenia pre elektronické riadenie zavesenia, meranie zaťaženia náprav pre elektronicky riadené rozdeľovanie brzdnej sily v komerčných ťažkých vozidlách, meranie sily pedálu elektronicky riadených brzdiacich systémov,
167 meranie brzdnej sily elektricky poháňaných a elektronicky riadených brzdných systémov, bezkontaktné meranie hnacieho a brzdného momentu, bezkontaktné meranie momentu a sily riadenia, ochrana pred poranením elektricky poháňaným sťahovaním okien a slnečných clôn (pricviknutie prstov alebo iných častí tela).
168 V prípade princípu skrížených (90º) vodičov, ktoré sú použité v magnetoelastickom senzore tlakovej alebo torznej sily, nie je indukované žiadne napätie v sekundárnej cievke transformátora, ak nepôsobí vonkajšia sila. Napätie na sekundárnej cievke sa objaví iba v prípade, ak vonkajšia sila zmení permeabilitu materiálu anizotropne. (obr.) Tento senzor môže byť použitý aj pre vyššie teploty (do 300ºC), to znamená, že môže byť inštalovaný aj v blízkosti bŕzd.
169 merací prstenec sily používajúci tenkovrstvové technológie: meranie sily ortogonálne uloženými rezistormi citlivými na tlak, meranie hydrostatického tlaku v piestom zaťažených hydrostatických valcoch. Vo všeobecnosti s gumovým tesnením, efekt mikroohybov: optické vláknové senzory sily.
170 Magnetoelastický senzor pnutia tlakovej sily so skríženými cievkami F 90 F 2 1. Budiaca cievka, 2. Meracia cievka, 3. Magnetický obvod - jarmo, 4. Magnetoelastický prvok citlivý na silu, 5. Fázový detektor (synchrónny diódový detektor), F Sila 5
171 Meranie krútiaceho momentu Existujú dva odlišné postupy pre meranie momentu: meranie uhla, meranie mechanického napätia pomocou deformácie pružného člena. Na rozdiel od metód opierajúcich sa o meranie mechanického predĺženia (DMS, magnetoelasticita), metódy merania uhla (napr. metód vírivých prúdov) vyžaduje určitú dĺžku torzného hriadeľa, na ktorom v dôsledku momentu dochádza k skrúteniu (0,4-4º).
172 Mechanické napätie σ úmerné krútiacemu momentu je snímané predĺženiami pod uhlom 45º vzhľadom k osi hriadeľa. (obr.)
173 Základný princíp merania momentu M r 1. Torzná tyč, F Torzný uhol, Torzné namáhanie, M Moment, R Polomer, l Dĺžka tyče F l 1 + -
174 Senzor momentu založený na meraní mechanického napätia Mechanické napätie sa meria rezistormi citlivými na ťah a tlak, ktoré sú zapojené v mostíku. Mostík je napájaný transformátorom, pričom riadiaca elektronika zabezpečuje konštantné napájacie napätie aj pri zmenách vzduchovej medzery pri bezkontaktnom spôsobe prenosu energie.
175 Ďalšie elektronické prvky na hriadeli zabezpečujú samotné meranie, spracovanie a spätný prenos informácie (napr. FM) bezkontaktným spôsobom (obr.). Požadovaná elektronika môže byť integrovaná v čipe a implementovaná na hriadeľ. Rezistory (tenzometre) môžu byť pripravené na okrúhlej oceľovej doštičke (napr. tenkovrstvovou technológiou), a potom privarené na hriadeľ. Tým sa môže dosiahnuť vysoká presnosť s primeranými nákladmi na výrobu.
176 Bezkontaktný tenzometrický senzor momentu s transformátormi v ložiskách 9,81 Nm M 1. Indikátor momentu, Torzné namáhanie, U 0 Napájacie napätie, R 1-4 Tenzometrické odpory, 1 U f R 2 R Tenzometre R 1 R 3 _ U 0
177 Senzor krútiaceho momentu vyhodnocujúci uhol natočenia Využíva koaxiálne umiestnené do seba zasunuté perforované valce, z ktorých každý je upevnený na opačnom konci meracieho hriadeľa dostatočnej dĺžky (obr.). Valce majú dva rady otvorov, ktoré sú voči sebe posunuté tak, aby sa pôsobením krútiaceho momentu menilo vzájomné prekrytie otvorov, čím sa mení indukčnosť dvoch fixných cievok, ktoré sú budené VF signálom ( 1MHz). Cievky sú umiestnené nad radmi otvorov vo valcoch. Vyhodnocovacia elektronika je umiestnená v tesnej blízkosti nepohyblivých cievok (obr.).
178 Senzor momentu s vírivými prúdmi M 1. Objímky so štrbinami, 2. Vzduchová medzera, 3. Vysokofrekvenčné cievky 3 2 1
179 Senzory prietoku, koncentrácie, vlhkosti
180 Merače prietoku Uplatnenie v automobiloch: Meranie prietoku paliva (okamžitá spotreba paliva je odvodená ako diferencia medzi pritekajúcim a odtekajúcim množstvom paliva. V zážihových motoroch s elektronicky riadeným dávkovaním paliva je množstvo nasatého vzduchu primárnym riadeným parametrom.
181 Hodnota množstva paliva je vopred vypočítaná, čiže meranie samotného množstva paliva, dodávaného pre proces horenia je redundantné. Avšak meranie prietoku paliva je nevyhnutné pre určenie a zobrazovanie spotreby vo vozidlách, ktoré nie sú vybavené vyspelou technikou riadenia. Meranie prietoku vzduchu v nasávacom potrubí; pomery hmotností sú významným faktorom v chemickom procese horenia.
182 Opodstatnenou potrebou je tak meranie nasávaného alebo natlačeného množstva vzduchu, pričom sú často využité procedúry merania objemu a dynamického tlaku. Maximálne množstvá nasávaného vzduchu sa pohybujú v rozmedzí kg/hod. Táto hodnota závisí od výkonnosti motora. V moderných motoroch sa pomer medzi minimálnym a maximálnym množstvom pohybuje v rozmedzí 1:90 až 1:100.
183 Meranie prietoku V prípade, že médium so špecifickou hustotou (homogénne médium) preteká konštantnou rýchlosťou v trubicou s konštantným prierezom A (bez turbulencií). Objem za jednotku času je potom daný Q v =A.v alebo rýchlosť toku hmotnosti je Q M =A.v..
184 V prípade vytvorenia zúženia v trubici (hrdlo) vznikne tlaková diferencia P v súlade s Bernoulliho zákonom. Táto diferencia je pomocnou veličinou pre určenie vzťahu medzi objemom a rýchlosťou toku hmotnosti P=konšt..v 2 = konšt.q v.o M. Nemenné zúženie spĺňa požiadavky pre meranie iba v rozsahu 1:10. Premenlivou polohou klapiek je možné monitorovať zmeny premenných v podstatne väčšom rozsahu.
185 Senzory prietoku založené na meraní objemu Využívajú princíp Kármánových vírivých ciest. Víry a krútňavy divergujú (rozchádzajú sa) z toku vzduchu na konštantnej vzdialenosti za prekážkou (obr.). Ich periodicita alebo frekvencia, ktorá je meraná na stene trubice (napr. monitorovaním tlaku alebo akustických vĺn) môže byť vyjadrená f=1/t= konšt.q v. Nevýhoda: pulzovanie v toku vzduchu môže vnášať chybu do výsledku merania.
186 Kármánov vírivý prietokomer objemu Oscilátor, 2. Generátor vírov, 3. Vysielač, 4. Ultrazvukové vlny, 5. Vírivé (turbulentné) prúdy, 6. Prijímač, 7. Zosilňovač, 8. Filter, 9. Tvarovač impulzov
187 Ultrazvukové meranie Môže byť použité pre monitorovanie času šírenia t ultrazvukového impulzu, ktorý prechádza tečúcim médiom pod uhlom a (obr.). Pri meraní doby prechodu oboma smermi je objem úmerný diferencii časov.
188 Ultrazvukové meranie prietoku S 2 t 12 2 Q v l a S 1 1 t 21 1,2 Vysielač prijímač 1 a 2, l Meraná dráha, S Povel vysielania, t Doba šírenia, Q V Pretekajúci objem, a Uhol.
189 Senzor založený na Pitotovej trubici Premenlivá poloha tlakových klapiek poskytuje premenlivý prierez prietoku (napr. vzduchu) (obr.). Veľkosť prierezu je závislá od rýchlosti pretekajúceho média. Pozícia klapky môže byť monitorovaná potenciometrom alebo iným senzorom uhla natočenia (obr.).
190 Pri návrhu sa často predpokladá (L-Jetronic) logaritmická závislosť medzi rýchlosťou prúdenia a výstupnou hodnotou senzora (prírastky výstupnej veličiny pri malých prietokoch sú väčšie ako pri veľkých). Pri KE-Jetronic sa však predpokladá lineárna závislosť. Zvýšenie chyby merania vzniká ak hybnosť klapky zamedzuje jej dynamickej odozve na zmeny prietoku (pulzácia vzduchu pri vysokých otáčkach a plne stlačenom plynovom pedáli.
191 Senzor prietoku vzduchu na báze Pitotovej trubice 1 Q Q Tlaková klapka, 2.Kompenzačná klapka, 3.Stláčaný objem, Q - Tok
192 Meranie hmotnosti vzduchu Systémy založené na meraní hmotnosti vzduchu využívajú princíp žeraveného drôtu (Hot-wire) a lebo žeraveného filmu (Hot-film). Jednotka neobsahuje pohyblivé mechanické časti. Príkladom môže byť systém s riadiacim obvodom, ktorý je súčasťou uzavretej slučky (obr.).
193 Senzor prietoku hmotnosti vzduchu na báze žeraveného drôtika Q M R K R H R 1 R 2 R M U m Q M Tok hmotnosti, U M Merané napätie, R H Odpor žeraveného drôtika, R K Kompenzačný odpor, R M Merací odpor, R 1,R 2 Nastavovacie odpory
194 Úlohou tejto regulačnej slučky je udržiavanie konštantnej teploty resp. teplotného rozdielu medzi tenkým žeraveným platinovým drôtom a obtekajúcim prúdom vzduchu. Prúd potrebný pre žeravenie drôtika poskytuje extrémne presnú, aj keď nie lineárne závislú, mieru hmotnosti obtekajúceho vzduchu. Elektronika umožňuje linearizovať túto závislosť. Vďaka zapojeniu so spätnou väzbou je možné monitorovať časové zmeny rádovo ms. Senzor však nevyhodnocuje smer prúdenia, čo vnášať chybu pri pulzovaní v nasávacom potrubí.
195 Platinový drôtik plní funkciu vyhrievaného aj vyhrievacieho prvku. Na drôtiku nesmú byť žiadne nečistoty alebo cudzorodé prvky. Hot-film senzory zlučujú všetky prvky meracieho systému (čidlá, riadiaca elektronika) na jednej podložke (obr.). Žeravený rezistor je situovaný na zadnej strane substrátu (wafer) s príslušným senzorom teploty na prednej strane. Kompenzačný odpor teploty R K (obr.) a žeraviaci prvok musia byť teplotne odizolované na keramickej podložke.
196 Senzor prietoku hmotnosti vzduchu na báze žeraveného filmu a a. Uloženie, b. Senzor (inštalovaný v uložení), 1. Chladič, 2. Vymedzovacia podložka, 3. Budiaci stupeň, b 4. Hybridný obvod, 5. Senzorový prvok (kovový film)
197 Mikromechanické senzory hmotnosti Sú extrémne kompaktné a tiež využívajú teplotné princípy. Tu však žeraviace a meracie rezistory sú v tvare tenkých platinových vrstiev vnorených do podložky kremíkového čipu. Teplotné odizolovanie od puzdra sa zabezpečí inštaláciou Si čipu do oblasti žeraviaceho rezistora H mikromechanicky ztenšenej časti Si (podobne ako membrána senzorov tlaku) (obr.).
198 Mikromechanický senzor prietoku hmotnosti vzduchu na báze žeraveného filmu 1. Dielektrická membrána, H Žeraviaci odpor, S H Senzory teploty žeraviaceho odporu, S L Senzor teploty vzduchu, S 1, S 2 Senzory teploty (obojsmerné), Q LM Tok hmotnosti vzduchu, s Merací bod, t Teplota. Q LM S L S 1 H S 2 1 S H Q LM = 0 t Q LM > 0 s
199 Susedné senzory teploty SH vyhrievacieho prvku H a senzor teploty SL (na hrubšej časti Si čipu) (obr.) slúžia na udržiavanie konštantnej teploty vyhrievacieho prvku H. Táto metóda je odlišná od predchádzajúcej. Signál je odvodený od teplotného rozdielu média (vzduch), ktorý je monitorovaný teplotnými senzorami S1 a S2. Senzory S1 a S2 sú vystavené prúdu vzduchu, ktorého smer je od S1 cez H k S2 (obr.). Charakteristika senzora je tiež nelineárna avšak na rozdiel od predchádzajucého senzora, tento je schopný indikovať smer prúdenia (obr.).
200 Senzory koncentrácie kyslíka vo výfukových plynoch Stupňujúce sa nároky a prísne normy pre emisie nútia zavádzať riadiace systémy so spätnou väzbou, ktoré riadia proces prípravy zmesi na základe analýzy výfukových plynov. Z tohto pohľadu existujú dve hlavné stratégie riadenia motorov. Jeden, ktorý bol zavedený spoločnosťou Volvo a je známy ako trojcestný katalytický konverzný systém, je rozšírený v Európe, Amerike a v Ázii.
201 V tomto systéme je senzormi kyslíka detekovaný pomer vzduch/palivo (Air/Fuel-A/F) vo výfukových plynoch a tento pomer je riadený tak, aby bol udržiavaný stechiometrický pomer 14,7:1 (obr.). Trojcestný katalyzátor pri týchto podmienkach dosahuje najväčšiu účinnosť a efektívne odstraňuje zložky HC, CO, NO x reakciou s kyslíkom. Odozva senzora musí byť preto rýchla a presná. Iná stratégia riadenia, označovaná ako systém spaľovania chudobnej zmesi bola zavedená japonskými výrobcami.
202 Účinnosť konverzie trojcestného katalyzátora 100 CO 80 NO X HC Účin n o sť k o n v e rz ie % O k n o 1 3 :1 1 4 :1 1 5 :1 1 6 :1 P o m e r v z d u c h /p a liv o
203 Zmyslom tejto stratégie je zvyšovanie ekonomickosti prevádzky (znižovanie spotreby) a udržiavanie emisií pod prípustnými limitmi. Je založený na redukcii znečisťujúcich zložiek pri vysokých pomeroch A/F a schopnosti zapálenia zmesi. Z pohľadu princípu činnosti je možné senzory kyslíka rozdeliť na: Polovodičové oxidové alebo chemorezistívne; Koncentračné články; Elektrochemické pumpy.
204 Z pohľadu aplikácie ich možno rozdeliť: Stechiometrické, Senzory chudobnej zmesi Stechiometricke sú použité v katalytických systémoch. Na výstupe poskytujú odozvu blízku stavom zapnutý, vypnutý v prípade ak sa pomer A/F mení od hodnoty 14,7:1 smerom hore (obr.). Senzory v systémoch s chudobnou zmesou majú odozvu proporcionálnu k hodnotám pomeru A/F v rozsahu od 15 do 23 (obr.). Chemorezistívne a články koncentrácie sú stechiometrického typu, kým elektrochemické sú určené pre systémy chudobnej zmesi.
205 Typická charakteristika senzora v systémoch s chudobnou zmesou U[V] Napätie na lambda sonde Pomer vzduch/palivo
206 Chemorezistívne senzory Elektrický odpor niektorých polovodičových oxidov sa mení s parciálnym tlakom kyslíka. Tento fenomén spôsobuje oxidácia alebo redukcia oxidov kyslíkom O 2. Oxid sa správa ako polovodič typu P alebo N. Závisí to od jeho chemických charakteristík. Oxid môže byť dopovaný materiálmi, ktoré vystupujú ako donory alebo akceptory a môžu plniť funkciu katalyzátorov medzi oxidom a kyslíkom, čím pôsobia na znižovanie prevádzkovej teploty. Senzor vyrobený hrubovrstvovou technológiou je na (obr.)
207 Chemorezistívny senzor vyrobený hrubovrstvovou technológiou Snímací prvok Ochrana Elektródy Vyhrievací článok Podložka (Oxid hlinitý)
208 V prípade polovodiča typu N, ak nie sú prítomné molekuly kyslíka a pri vysokej teplote sú všetky elektróny z valenčnej sféry vo vodivostnej a materiál vykazuje nízky odpor. V prípade, ak je prítomný kyslík s nízkou koncentráciou a polovodičový materiál je vystavený pôsobeniu takejto zmesi plynov, odpor materiálu okamžite vzrastie. Tento fenomén je spôsobený zmenou pohyblivosti nosičov náboja na povrchu materiálu molekulami kyslíka. Monitorovaním štruktúry (granulometria) senzora je možné meniť jeho citlivosť.
209 Ak sú v zmesi plynov prítomné redukčné prvky aj kyslík, tie reagujú navzájom. Iba nadbytočné molekuly kyslíka reagujú s polovodičovým oxidom, čím menia jeho odpor. V prípade ak redukčné komponenty prevyšujú početnosť molekúl kyslíka, potom polovodičový oxid vykazuje odpor ako keby kyslík nebol prítomný. Preto pri prechode od prevahy redukčných komponentov (bohatá zmes) k stavu keď prevláda kyslík (chudobná zmes) je zmena odporu najvýraznejšia.
210 Tieto materiály umožňujú realizáciu prvkov s veľmi jednoduchou a lacnou štruktúrou, pričom sa využíva hrubovrstvová alebo tenkovrstvová technológia na keramických podložkách. V súčasnosti sú komerčne dostupné, avšak menej rozšírené titánové senzory (TiO 2 ) ( ). Majú dobré chemorezistívne vlastnosti a vykazujú pri chudobnej zmesi vyšší odpor. V počiatkoch sa vyrábal tento senzor ako dvojvývodový neskôr bol rozšírený o vyhrievací prvok. Súčasné alternatívne materiály sú Ga 2 O 3, SrTiO 2 a BaTiO 3. Často sú vyrábané tenkovrstvovou technológiou.
211 Titanový senzor O 2 Oceľový obal Vyhrevný článok Keramický izolátor Senzorový prvok 4 Vývody Kontakty, 2. Keramický izolátor, 3. Prívody, 4. Oceľové uchytenie, 5. TiO2 prvok, 6. kryt
212 Článok koncentrácie Senzory ako články koncentrácie sú založené na elektrochemických vlastnostiach zirkónu (ZrO 2 ). Tento je značne rozšírený. Známy je ako Lambda sonda. Meno pochádza z pomeru A A F( REAL) F( STECHIOMETRIC ) ktorý je v automobilovej oblasti bežne používaný.
213 Ak prvok z oxidu zirkónu, ktorý má dva povrchy vystavené dvom plynom s odlišnou koncentráciou kyslíka, objaví sa medzi týmito povrchmi napätie. Na tom, ktorý je vystavený vyššej koncentrácii kyslíka, je pozitívny potenciál. Tento jav je umocňovaný zvýšenou teplotou. Fyzika tohto javu ešte nie je úplne ozrejmená do všetkých detailov. Štruktúra tohto senzora bola v počiatkoch jednoduchá, neskôr bola rozšírená o vyhrievanie. V súčasnosti je dôraz kladený na výkon senzorov hrubovrstvovou technológiou na keramickej podložke. (obr.)
214 Senzor O 2 vo výfukovom potrubí 1. Keramický senzor, 2. Elektródy, 3. Kontakty, 4. Kontakt uloženia, 5. Výfukové potrubie, 6. Ochranný keramický povlak (porézny) 5 Z h o r e n é s p lo d in y 6 V z d u c h
215 Charakteristika senzora Us Prebytok vzduchu, U s Napätie senzora
216 Štruktúra reálneho senzora O 2 Ochranná čiapočka Keramický izolátor Otvor pre prívod vzduchu Uloženie Tesnenie Upínací závit Ochranný kryt Vstupná štrbina výfukového plynu Prívod Manžeta zvieracieho kontaktu Pružina kontaktu Priechodka kontaktu Keramické telo senzora Vnútorná vodivá vrstava Strana vzduchu Strana výfukových plynov Vonkajšia vodivá vrstva
217 Senzory založené na elektrochemických pumpách Ak je na kysličník zirkónu priložené napätie, to spôsobí pumpovanie kyslíka cez tuholátkový elektrolyt od katódy ku anóde. Senzor založený na tomto fenoméne je zložený z prvku zo zirkónu s dvoma elektródami a z prvku, ktorý obmedzuje difúziu kyslíka z vonkajšej strany katódy (obr.). Princíp činnosti umožňuje meranie koncentrácie kyslíka aj v prípade, ak A/F je vysoké, a preto sú vhodné pre použitie v systémoch s chudobnou zmesou.
218 Principiálna schéma senzora založeného na elektrochemickej pumpe Senzorová bunka V P 1 O 2 P vyfukové plyny (O 2 ) R I p O 2 Čerpajúca bunka
219 Senzor založený na elektrochemickej pumpe (štruktúra) V ý f u k o v ý p l y n I P 1. Tuholátkový elektrolyt, 2. Bunka pumpujúca kyslík, 3. Difúzna štrbina, 4 4. Referenčný vzduchový kanál, 5. Žeraviace vlákno, 6. Riadiaci obvod I p Prúd pumpy, U H Žeraviace napätie, U ref Referenčné napätie U H 5 U r e f 6
220 Závislosť pumpujúceho prúdu širokopásmového senzora O 2 ma 3,0 Budiaci prúd I p 2,0 1,0 0-1,0-2,0 0,7 1,0 1,3 1,6 1,9 2,2 2,5 Faktor množstva vzduchu
221 Senzory pre automobilové aplikácie sú vyrobené hrubovrstvovou technológiou. Zirkonový prvok s elektródami po oboch stranách a porézny prvok sú umiestnené medzi katódu a plyny. Anóda je v kontakte so vzduchom okolia. Privedením napätia na elektródy tečie prúd, ktorý odpovedá prenosu kyslíka zo zmesi plynov do okolitého prostredia. Prúd dosiahne saturáciu pri danom napätí, ak množstvo pumpovaného kyslíka je obmedzené difúznym procesom cez poréznu prepážku. Za týchto podmienok je elektrický prúd funkciou koncentrácie kyslíka v zmesi plynov.
222 Senzory vlhkosti Uplatnenie: monitorovanie sušiča vzduchu vzduchových bŕzd monitorovanie vonkajšej vlhkosti pre varovný systém námrazy na vozovke výpočet rosného bodu v interiéri vozidla (riadenie klimatizácie, monitorovanie parametrov ovzdušia interiéru, zamedzenie zahmlievania okien).
223 Pre meranie relatívnej vlhkosti sú často používané kapacitné senzory. Senzory tohto typu sú založené na technológii využívajúcej tenkovrstvové polyméry pokovované z oboch strán. Kapacita týchto kondenzátorov je modifikovaná nepriamo úmerne množstvu absorbovanej vlhkosti. Typická časová konštanta je 30s. Rosný bod sa vypočítava zohľadňovaním teploty vzduchu. Pri inštalácii pre riadenie kvality vzduchu je senzor chránený teflónovou membránou pred vplyvom škodlivých látok.
224 Všeobecne povedané, jednotka riadenia kvality vzduchu obsahuje predovšetkým CO a NOx senzory, najčastejšie na báze tenkovrstvových rezistorov ( SnOx), ktoré absorpciou meraného média menia svoj odpor v širokom rozsahu (1-100k ).
225 Príklad teplotnej závislosti NTC závislosť odporu 2. - PTC závislosť odporu t - teplota R - odpor Senzory teploty 1 R 2 t
226 Použitá literatúra [1] Ronald K. Jurgen: Automotive Electronics Handbook (2nd ed.). McGraw-Hill Professional, 1999, ISBN [2] Bosch: Automotive Handbook (8th ed.). Bentley Publishers, 2011, ISBN [3] Uwe Kiencke, Lars Nielsen: Automotive Control Systems. Springer, 2005, ISBN [4] Christopher O. Nwagboso: Automotive Sensory Systems. Chapman & Hall, 1993, ISBN [5] Ernest O. Doebelin: Measurement Systems Application and Design (3 rd ed.). McGraw-Hill, 1983, ISBN [6] Jürgen Valldorf Wolfgang Gessner: Advanced Microsystems for Automotive Applications 2003, Springer, 2003, ISBN [7] Firemná literatúra koncernu Volkswagen.
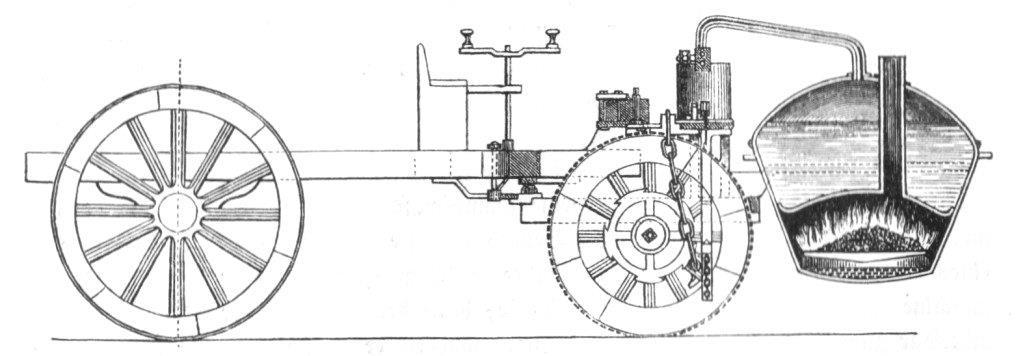

227
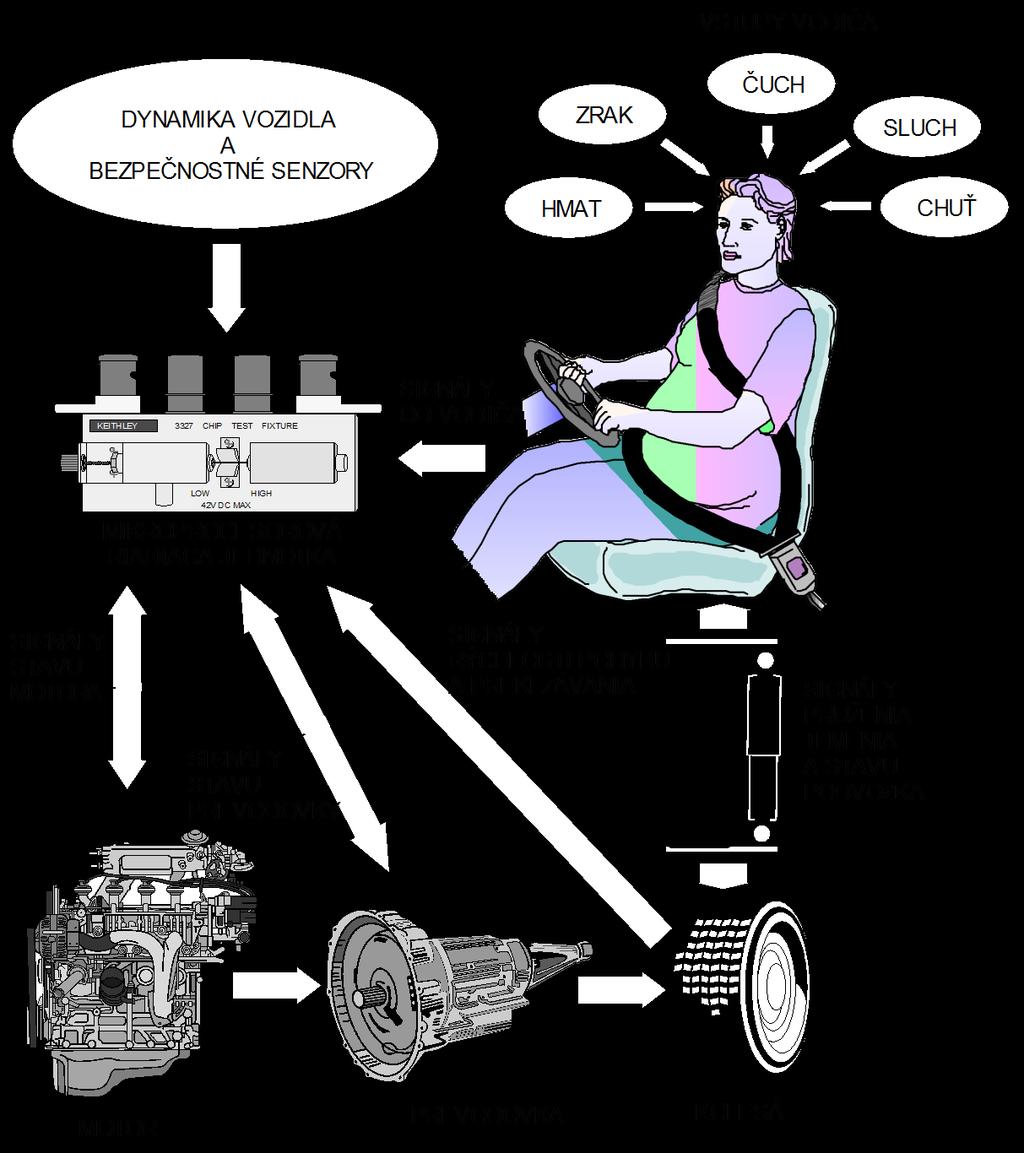
228
229 Použitie: príprava zmesi paliva, podtlak v nasávacom potrubí - riadenie časovania zapaľovania, hodnota tlaku - zaťaženie motora. (zaťaženie motora stúpa otáčky motora klesajú podtlak v nasávacom potrubí sa približuje k hodnote atmosferického tlaku, to je zvýraznené stlačením akceleračného pedálu a následným potvorením škrtiacej klapky). V minulosti-mechanické metódy merania tlaku, v súčasnosti najčastejšie-piezorezistívne kremíkové membrány
230 Použitie: Od polohy (uhla natočenia) kľukového hriadeľa sa odvíja časovanie vstrekovania a zapaľovania. Pre zisťovanie uhla natočenia kľukového hriadeľa sa najčastejšie používajú senzory založené na Hallovom a Wiegandovom jave, optické senzory a indukčné senzory.
231 Výkonnosť a ekonomickosť chodu motora je možné optimalizovať časovaním zapálenia zmesi - nutnosť optimalizácie procesu horenia v presne definovanej uhlovej polohe kľukového hriadeľa (referencia - horná úvrať). Ak proces horenia začne skôr vznikne v motore klepanie alebo detonácie. Naopak, ak proces horenia začne neskôr, vytvorí sa vo valci menší tlak a tým sa znižuje účinnosť motora. Časovanie ovplyvňuje aj splodiny horenia.
232 Použitie: Signál z týchto senzorov je použitý pre riadenie pomeru paliva a vzduchu privádzaného do motora. Najčastejšie sa používajú anemometre na báze žeraveného drôtika
233 Keramický izolátor Tesnenie Závit Ochranný uzáver Otvor prívodu vzduchu Úchyt Ochranný tubus Vstupné otvory výfukových plynov Pripojenie ICAD Kontaktná pružina Keramické Upinací spojkový kontakt telo èidla Kontaktná vývodka Strana výfukových plynov Strana vzduchu Vonkajšia elektricky vodivá vrstva Vnutorná elektricky vodivá vrstva
234 Senzorová bunka (člen) V P 2 O 2 P vyfukové plyny (O 2 ) R Vyhrevný článok I p Oceľový úchyt (obal) O 2 Pumpujúca bunka (člen) Keramický izolátor Senzorový člen Vývody
235 1.0 Napätie senzora kyslíka Napätie [V] Pomer vzduch/palivo
236 Aj napriek vyspelej technike riadenia zapaľovania, môžu nastať podmienky, počas ktorých je motor náchylný ku klepaniu alebo detonáciám. Detonácie vedú k fyzickému poškodeniu priestoru horenia a komponentov prenosu síl ložiská, ojnice atď. Väčšina senzorov klepania je založená na piezoelektrických senzoroch, ktoré pracujú ako merače akcelerácií resp. vibrácií spôsobených detonáciami.
237 Konektor/hlavica Kolíky konektora Prívody Kryštál Zliatinový disk Tesnenie Podstavec Senzor pre monitorvanie klepania pri zapaľovaní
238 Iným prístupom je zisťovanie podmienok vzniku klepania meraním ionizačného prúdu v blízkosti zapaľovacej sviečky po zážihu. Vývoj posledných rokov smeruje k monitorovaniu horenia pomocou optických vlákien a vysoko rýchlostných kamier, alebo tlakových senzorov umiestnených v priestore horenia, prípadne senzorov ionizačného plameňa.
239 Otáčky výkonnej jednotky Výkon a krútiaci moment motora Výkon a krútiaci moment uplatnením prevodového pomeru prevodovky Výkon a krútiaci moment na kolesách hnacej nápravy Otáčky kolies hnacej nápravy Prevodový momer prevodovky a hnacej nápravy
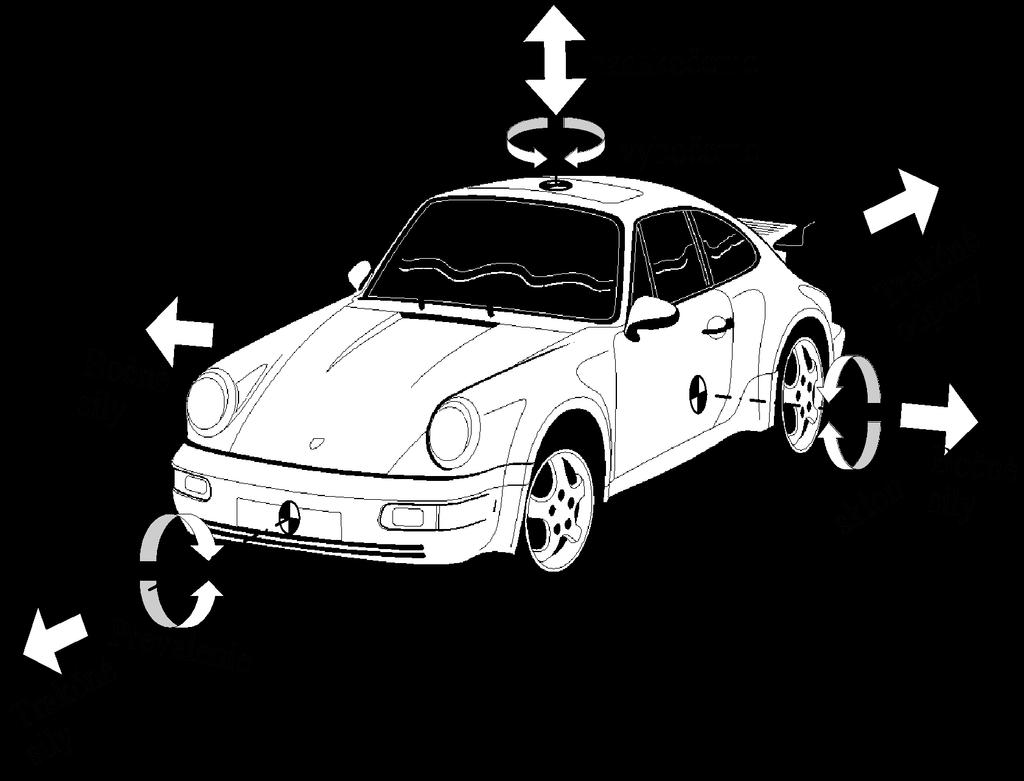
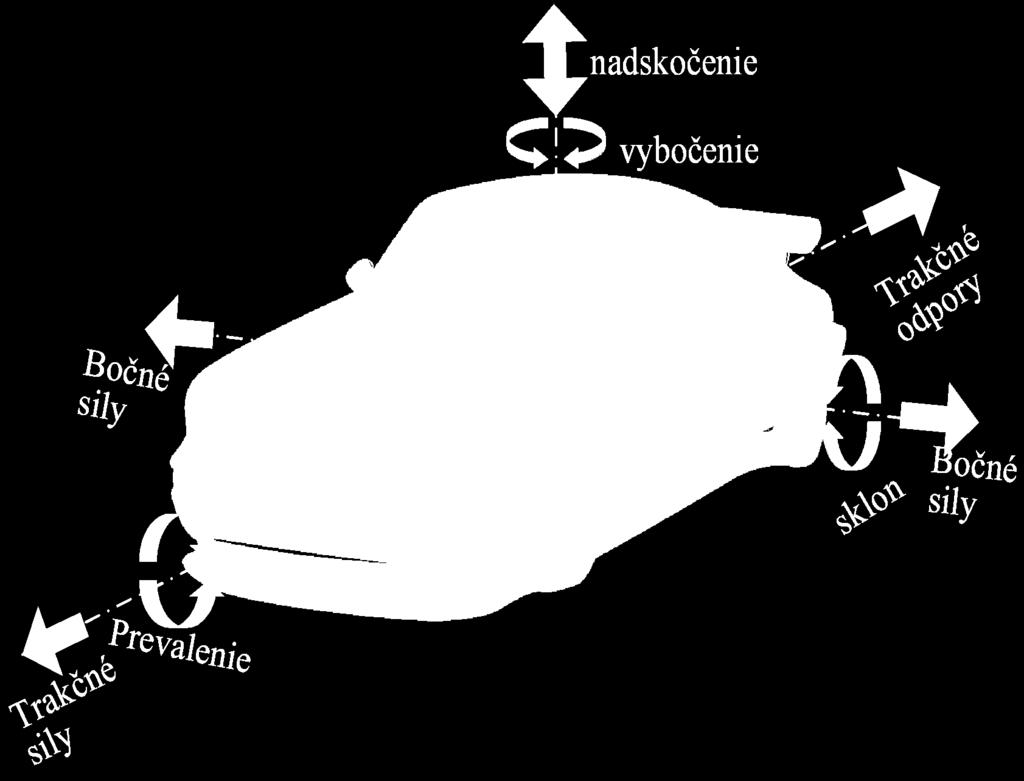
240
241 Pruženie a tlmenie Koleso Pasívne zavesenie kolies
242 Senzory Adaptívna riadiaca elektronika Senzory S I L A Zdroj výkonu Koleso Aktívne zavesenie kolies
243 AKCELEROMETER SKELET PRENÁŠAČ SILY ROZDIELOVÝ ZOSILŇOVAČ SPRACOVANIE SIGNÁLOV MIKROP ROCESOROVÉ RIADENIE POTENCIOMETER A K T U Á T O R V E N T I L Y VSTUP VÝSTUP
244 Pripojenie k škrtiacej klapke Tiahlo Pružina Izolácia Bežec U REF U VÝST
245 Pneumatika Kruhová anténa Strmeň Pevná anténa Kruhová anténa Tlak a teplota
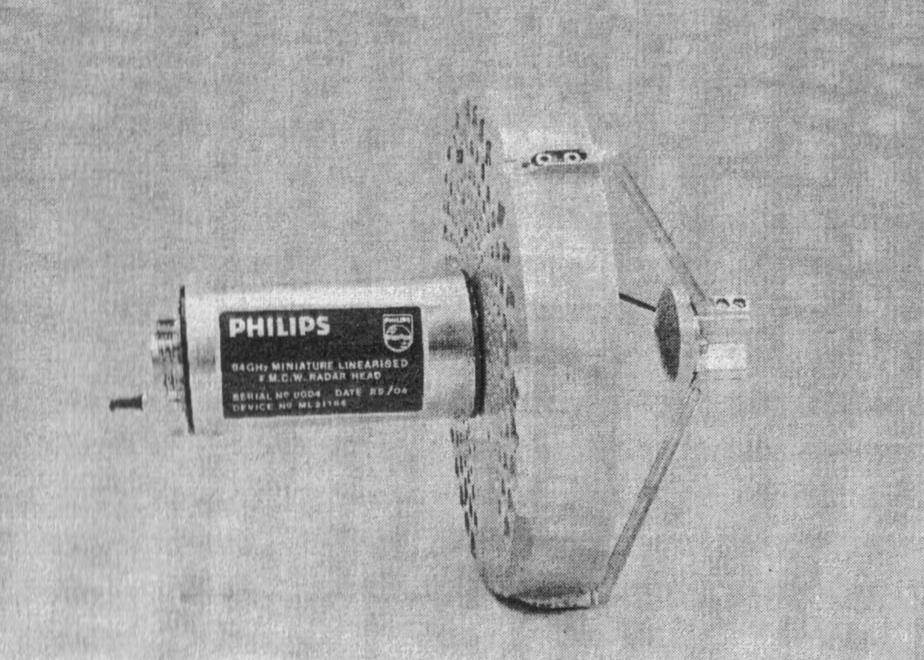
246

247

248
249
250
UČEBNÉ TEXTY. Moderné vzdelávanie pre vedomostnú spoločnosť Meranie a diagnostika. Meranie snímačov a akčných členov
 Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Vzdelávacia oblasť: Predmet:
Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Vzdelávacia oblasť: Predmet:
3. Striedavé prúdy. Sínusoida
 . Striedavé prúdy VZNIK: Striedavý elektrický prúd prechádza obvodom, ktorý je pripojený na zdroj striedavého napätia. Striedavé napätie vyrába synchrónny generátor, kde na koncoch rotorového vinutia sa
. Striedavé prúdy VZNIK: Striedavý elektrický prúd prechádza obvodom, ktorý je pripojený na zdroj striedavého napätia. Striedavé napätie vyrába synchrónny generátor, kde na koncoch rotorového vinutia sa
Obvod a obsah štvoruholníka
 Obvod a štvoruholníka D. Štyri body roviny z ktorých žiadne tri nie sú kolineárne (neležia na jednej priamke) tvoria jeden štvoruholník. Tie body (A, B, C, D) sú vrcholy štvoruholníka. strany štvoruholníka
Obvod a štvoruholníka D. Štyri body roviny z ktorých žiadne tri nie sú kolineárne (neležia na jednej priamke) tvoria jeden štvoruholník. Tie body (A, B, C, D) sú vrcholy štvoruholníka. strany štvoruholníka
Elektronická stabilizácia jazdy vozidla ESP
 Elektronická stabilizácia jazdy vozidla ESP Niekedy existujú určité hraničné oblasti, kedy je vozidlo veľmi ťažko ovládateľné. Veľmi často sú tieto kritické situácie človekom nesprávne odhadnuté a prípadným
Elektronická stabilizácia jazdy vozidla ESP Niekedy existujú určité hraničné oblasti, kedy je vozidlo veľmi ťažko ovládateľné. Veľmi často sú tieto kritické situácie človekom nesprávne odhadnuté a prípadným
DOMÁCE ZADANIE 1 - PRÍKLAD č. 2
 Mechanizmy s konštantným prevodom DOMÁCE ZADANIE - PRÍKLAD č. Príklad.: Na obrázku. je zobrazená schéma prevodového mechanizmu tvoreného čelnými a kužeľovými ozubenými kolesami. Určte prevod p a uhlovú
Mechanizmy s konštantným prevodom DOMÁCE ZADANIE - PRÍKLAD č. Príklad.: Na obrázku. je zobrazená schéma prevodového mechanizmu tvoreného čelnými a kužeľovými ozubenými kolesami. Určte prevod p a uhlovú
UČEBNÉ TEXTY. Moderné vzdelávanie pre vedomostnú spoločnosť. Vzdelávacia oblasť:
 Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Vzdelávacia oblasť: Predmet:
Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Vzdelávacia oblasť: Predmet:
Servopohon vzduchotechnických klapiek 8Nm, 16Nm, 24Nm
 Servopohon vzduchotechnických klapiek 8Nm, 16Nm, 24Nm Spoločnosť LUFBERG predstavuje servopohony s krútiacim momentom 8Nm, 16Nm, 24Nm pre použitie v systémoch vykurovania, ventilácie a chladenia. Vysoko
Servopohon vzduchotechnických klapiek 8Nm, 16Nm, 24Nm Spoločnosť LUFBERG predstavuje servopohony s krútiacim momentom 8Nm, 16Nm, 24Nm pre použitie v systémoch vykurovania, ventilácie a chladenia. Vysoko
Matematika Funkcia viac premenných, Parciálne derivácie
 Matematika 2-01 Funkcia viac premenných, Parciálne derivácie Euklidovská metrika na množine R n všetkých usporiadaných n-íc reálnych čísel je reálna funkcia ρ: R n R n R definovaná nasledovne: Ak X = x
Matematika 2-01 Funkcia viac premenných, Parciálne derivácie Euklidovská metrika na množine R n všetkých usporiadaných n-íc reálnych čísel je reálna funkcia ρ: R n R n R definovaná nasledovne: Ak X = x
KAGEDA AUTORIZOVANÝ DISTRIBÚTOR PRE SLOVENSKÚ REPUBLIKU
 DVOJEXCENTRICKÁ KLAPKA je uzatváracia alebo regulačná armatúra pre rozvody vody, horúcej vody, plynov a pary. Všetky klapky vyhovujú smernici PED 97/ 23/EY a sú tiež vyrábané pre výbušné prostredie podľa
DVOJEXCENTRICKÁ KLAPKA je uzatváracia alebo regulačná armatúra pre rozvody vody, horúcej vody, plynov a pary. Všetky klapky vyhovujú smernici PED 97/ 23/EY a sú tiež vyrábané pre výbušné prostredie podľa
Meranie na jednofázovom transformátore
 Fakulta elektrotechniky a informatiky TU v Košiciach Katedra elektrotechniky a mechatroniky Meranie na jednofázovom transformátore Návod na cvičenia z predmetu Elektrotechnika Meno a priezvisko :..........................
Fakulta elektrotechniky a informatiky TU v Košiciach Katedra elektrotechniky a mechatroniky Meranie na jednofázovom transformátore Návod na cvičenia z predmetu Elektrotechnika Meno a priezvisko :..........................
KATEDRA DOPRAVNEJ A MANIPULAČNEJ TECHNIKY Strojnícka fakulta, Žilinská Univerzita
 132 1 Absolútna chyba: ) = - skut absolútna ochýlka: ) ' = - spr. relatívna chyba: alebo Chyby (ochýlky): M systematické, M náhoné, M hrubé. Korekcia: k = spr - = - Î' pomerná korekcia: Správna honota:
132 1 Absolútna chyba: ) = - skut absolútna ochýlka: ) ' = - spr. relatívna chyba: alebo Chyby (ochýlky): M systematické, M náhoné, M hrubé. Korekcia: k = spr - = - Î' pomerná korekcia: Správna honota:
Kontrolné otázky na kvíz z jednotiek fyzikálnych veličín. Upozornenie: Umiestnenie správnej a nesprávnych odpovedí sa môže v teste meniť.
 Kontrolné otázky na kvíz z jednotiek fyzikálnych veličín Upozornenie: Umiestnenie správnej a nesprávnych odpovedí sa môže v teste meniť. Ktoré fyzikálne jednotky zodpovedajú sústave SI: a) Dĺžka, čas,
Kontrolné otázky na kvíz z jednotiek fyzikálnych veličín Upozornenie: Umiestnenie správnej a nesprávnych odpovedí sa môže v teste meniť. Ktoré fyzikálne jednotky zodpovedajú sústave SI: a) Dĺžka, čas,
1. písomná práca z matematiky Skupina A
 1. písomná práca z matematiky Skupina A 1. Vypočítajte : a) 84º 56 + 32º 38 = b) 140º 53º 24 = c) 55º 12 : 2 = 2. Vypočítajte zvyšné uhly na obrázku : β γ α = 35 12 δ a b 3. Znázornite na číselnej osi
1. písomná práca z matematiky Skupina A 1. Vypočítajte : a) 84º 56 + 32º 38 = b) 140º 53º 24 = c) 55º 12 : 2 = 2. Vypočítajte zvyšné uhly na obrázku : β γ α = 35 12 δ a b 3. Znázornite na číselnej osi
STRIEDAVÝ PRÚD - PRÍKLADY
 STRIEDAVÝ PRÚD - PRÍKLADY Príklad0: V sieti je frekvencia 50 Hz. Vypočítajte periódu. T = = = 0,02 s = 20 ms f 50 Hz Príklad02: Elektromotor sa otočí 50x za sekundu. Koľko otáčok má za minútu? 50 Hz =
STRIEDAVÝ PRÚD - PRÍKLADY Príklad0: V sieti je frekvencia 50 Hz. Vypočítajte periódu. T = = = 0,02 s = 20 ms f 50 Hz Príklad02: Elektromotor sa otočí 50x za sekundu. Koľko otáčok má za minútu? 50 Hz =
Start. Vstup r. O = 2*π*r S = π*r*r. Vystup O, S. Stop. Start. Vstup P, C V = P*C*1,19. Vystup V. Stop
 1) Vytvorte algoritmus (vývojový diagram) na výpočet obvodu kruhu. O=2xπxr ; S=πxrxr Vstup r O = 2*π*r S = π*r*r Vystup O, S 2) Vytvorte algoritmus (vývojový diagram) na výpočet celkovej ceny výrobku s
1) Vytvorte algoritmus (vývojový diagram) na výpočet obvodu kruhu. O=2xπxr ; S=πxrxr Vstup r O = 2*π*r S = π*r*r Vystup O, S 2) Vytvorte algoritmus (vývojový diagram) na výpočet celkovej ceny výrobku s
Odporníky. 1. Príklad1. TESLA TR
 Odporníky Úloha cvičenia: 1.Zistite technické údaje odporníkov pomocou katalógov 2.Zistite menovitú hodnotu odporníkov označených farebným kódom Schématická značka: 1. Príklad1. TESLA TR 163 200 ±1% L
Odporníky Úloha cvičenia: 1.Zistite technické údaje odporníkov pomocou katalógov 2.Zistite menovitú hodnotu odporníkov označených farebným kódom Schématická značka: 1. Príklad1. TESLA TR 163 200 ±1% L
Matematika 2. časť: Analytická geometria
 Matematika 2 časť: Analytická geometria RNDr. Jana Pócsová, PhD. Ústav riadenia a informatizácie výrobných procesov Fakulta BERG Technická univerzita v Košiciach e-mail: jana.pocsova@tuke.sk Súradnicové
Matematika 2 časť: Analytická geometria RNDr. Jana Pócsová, PhD. Ústav riadenia a informatizácie výrobných procesov Fakulta BERG Technická univerzita v Košiciach e-mail: jana.pocsova@tuke.sk Súradnicové
M6: Model Hydraulický systém dvoch zásobníkov kvapaliny s interakciou
 M6: Model Hydraulický ytém dvoch záobníkov kvapaliny interakciou Úlohy:. Zotavte matematický popi modelu Hydraulický ytém. Vytvorte imulačný model v jazyku: a. Matlab b. imulink 3. Linearizujte nelineárny
M6: Model Hydraulický ytém dvoch záobníkov kvapaliny interakciou Úlohy:. Zotavte matematický popi modelu Hydraulický ytém. Vytvorte imulačný model v jazyku: a. Matlab b. imulink 3. Linearizujte nelineárny
Návrh vzduchotesnosti pre detaily napojení
 Výpočet lineárneho stratového súčiniteľa tepelného mosta vzťahujúceho sa k vonkajším rozmerom: Ψ e podľa STN EN ISO 10211 Návrh vzduchotesnosti pre detaily napojení Objednávateľ: Ing. Natália Voltmannová
Výpočet lineárneho stratového súčiniteľa tepelného mosta vzťahujúceho sa k vonkajším rozmerom: Ψ e podľa STN EN ISO 10211 Návrh vzduchotesnosti pre detaily napojení Objednávateľ: Ing. Natália Voltmannová
Prechod z 2D do 3D. Martin Florek 3. marca 2009
 Počítačová grafika 2 Prechod z 2D do 3D Martin Florek florek@sccg.sk FMFI UK 3. marca 2009 Prechod z 2D do 3D Čo to znamená? Ako zobraziť? Súradnicové systémy Čo to znamená? Ako zobraziť? tretia súradnica
Počítačová grafika 2 Prechod z 2D do 3D Martin Florek florek@sccg.sk FMFI UK 3. marca 2009 Prechod z 2D do 3D Čo to znamená? Ako zobraziť? Súradnicové systémy Čo to znamená? Ako zobraziť? tretia súradnica
Matematický model robota s diferenciálnym kolesovým podvozkom
 Matematický model robota s diferenciálnym kolesovým podvozkom Demonštračný modul Úlohy. Zostavte matematický model robota s diferenciálnym kolesovým podvozkom 2. Vytvorte simulačný model robota v simulačnom
Matematický model robota s diferenciálnym kolesovým podvozkom Demonštračný modul Úlohy. Zostavte matematický model robota s diferenciálnym kolesovým podvozkom 2. Vytvorte simulačný model robota v simulačnom
REZISTORY. Rezistory (súčiastky) sú pasívne prvky. Používajú sa vo všetkých elektrických
 sú pasívne prvky. Používajú sa vo všetkých elektrických") REZISTORY Rezistory (súčiastky) sú pasívne prvky. Používajú sa vo všetkých elektrických obvodoch. Základnou vlastnosťou rezistora je jeho odpor. Odpor je fyzikálna vlastnosť, ktorá je daná štruktúrou materiálu
REZISTORY Rezistory (súčiastky) sú pasívne prvky. Používajú sa vo všetkých elektrických obvodoch. Základnou vlastnosťou rezistora je jeho odpor. Odpor je fyzikálna vlastnosť, ktorá je daná štruktúrou materiálu
MaxxFlow Meranie vysokých prietokov sypkých materiálov
 MaxxFlow Meranie vysokých prietokov sypkých materiálov Použitie: MaxxFlow je špeciálne vyvinutý pre meranie množstva sypkých materiálov s veľkým prietokom. Na základe jeho kompletne otvoreného prierezu
MaxxFlow Meranie vysokých prietokov sypkých materiálov Použitie: MaxxFlow je špeciálne vyvinutý pre meranie množstva sypkých materiálov s veľkým prietokom. Na základe jeho kompletne otvoreného prierezu
Riadenie elektrizačných sústav
 Riaenie elektrizačných sústav Paralelné spínanie (fázovanie a kruhovanie) Pomienky paralelného spínania 1. Rovnaký sle fáz. 2. Rovnaká veľkosť efektívnych honôt napätí. 3. Rovnaká frekvencia. 4. Rovnaký
Riaenie elektrizačných sústav Paralelné spínanie (fázovanie a kruhovanie) Pomienky paralelného spínania 1. Rovnaký sle fáz. 2. Rovnaká veľkosť efektívnych honôt napätí. 3. Rovnaká frekvencia. 4. Rovnaký
AerobTec Altis Micro
 AerobTec Altis Micro Záznamový / súťažný výškomer s telemetriou Výrobca: AerobTec, s.r.o. Pionierska 15 831 02 Bratislava www.aerobtec.com info@aerobtec.com Obsah 1.Vlastnosti... 3 2.Úvod... 3 3.Princíp
AerobTec Altis Micro Záznamový / súťažný výškomer s telemetriou Výrobca: AerobTec, s.r.o. Pionierska 15 831 02 Bratislava www.aerobtec.com info@aerobtec.com Obsah 1.Vlastnosti... 3 2.Úvod... 3 3.Princíp
PRIEMER DROTU d = 0,4-6,3 mm
 PRUŽINY PRUŽINY SKRUTNÉ PRUŽINY VIAC AKO 200 RUHOV SKRUTNÝCH PRUŽÍN PRIEMER ROTU d = 0,4-6,3 mm èíslo 3.0 22.8.2008 8:28:57 22.8.2008 8:28:58 PRUŽINY SKRUTNÉ PRUŽINY TECHNICKÉ PARAMETRE h d L S Legenda
PRUŽINY PRUŽINY SKRUTNÉ PRUŽINY VIAC AKO 200 RUHOV SKRUTNÝCH PRUŽÍN PRIEMER ROTU d = 0,4-6,3 mm èíslo 3.0 22.8.2008 8:28:57 22.8.2008 8:28:58 PRUŽINY SKRUTNÉ PRUŽINY TECHNICKÉ PARAMETRE h d L S Legenda
7. FUNKCIE POJEM FUNKCIE
 7. FUNKCIE POJEM FUNKCIE Funkcia f reálnej premennej je : - každé zobrazenie f v množine všetkých reálnych čísel; - množina f všetkých usporiadaných dvojíc[,y] R R pre ktorú platí: ku každému R eistuje
7. FUNKCIE POJEM FUNKCIE Funkcia f reálnej premennej je : - každé zobrazenie f v množine všetkých reálnych čísel; - množina f všetkých usporiadaných dvojíc[,y] R R pre ktorú platí: ku každému R eistuje
,Zohrievanie vody indukčným varičom bez pokrievky,
 Farba skupiny: zelená Označenie úlohy:,zohrievanie vody indukčným varičom bez pokrievky, Úloha: Zistiť, ako závisí účinnosť zohrievania vody na indukčnom variči od priemeru použitého hrnca. Hypotéza: Účinnosť
Farba skupiny: zelená Označenie úlohy:,zohrievanie vody indukčným varičom bez pokrievky, Úloha: Zistiť, ako závisí účinnosť zohrievania vody na indukčnom variči od priemeru použitého hrnca. Hypotéza: Účinnosť
Metodicko pedagogické centrum. Národný projekt VZDELÁVANÍM PEDAGOGICKÝCH ZAMESTNANCOV K INKLÚZII MARGINALIZOVANÝCH RÓMSKYCH KOMUNÍT
 Moderné vzdelávanie pre vedomostnú spoločnosť / Projekt je spolufinancovaný zo zdrojov EÚ Kód ITMS: 26130130051 číslo zmluvy: OPV/24/2011 Metodicko pedagogické centrum Národný projekt VZDELÁVANÍM PEDAGOGICKÝCH
Moderné vzdelávanie pre vedomostnú spoločnosť / Projekt je spolufinancovaný zo zdrojov EÚ Kód ITMS: 26130130051 číslo zmluvy: OPV/24/2011 Metodicko pedagogické centrum Národný projekt VZDELÁVANÍM PEDAGOGICKÝCH
Kontrolné otázky z jednotiek fyzikálnych veličín
 Verzia zo dňa 6. 9. 008. Kontrolné otázky z jednotiek fyzikálnych veličín Upozornenie: Umiestnenie správnej odpovede sa môže v kontrolnom teste meniť. Takisto aj znenie nesprávnych odpovedí. Uvedomte si
Verzia zo dňa 6. 9. 008. Kontrolné otázky z jednotiek fyzikálnych veličín Upozornenie: Umiestnenie správnej odpovede sa môže v kontrolnom teste meniť. Takisto aj znenie nesprávnych odpovedí. Uvedomte si
Priamkové plochy. Ak každým bodom plochy Φ prechádza aspoň jedna priamka, ktorá (celá) na nej leží potom plocha Φ je priamková. Santiago Calatrava
 na nej leží potom plocha Φ je priamková. Santiago Calatrava") Priamkové plochy Priamkové plochy Ak každým bodom plochy Φ prechádza aspoň jedna priamka, ktorá (celá) na nej leží potom plocha Φ je priamková. Santiago Calatrava Priamkové plochy rozdeľujeme na: Rozvinuteľné
Priamkové plochy Priamkové plochy Ak každým bodom plochy Φ prechádza aspoň jedna priamka, ktorá (celá) na nej leží potom plocha Φ je priamková. Santiago Calatrava Priamkové plochy rozdeľujeme na: Rozvinuteľné
PRÍSTROJE PRE ROZVÁDZAČE
 PRÍSTROJE PRE ROZVÁDZAČE MERAČE SPOTREBY ENERGIE MONITORY ENERGIE ANALYZÁTORY KVALITY ENERGIE PRÚDOVÉ TRANSFORMÁTORY BOČNÍKY ANALÓGOVÉ PANELOVÉ MERAČE DIGITÁLNE PANELOVÉ MERAČE MICRONIX spol. s r.o. -
PRÍSTROJE PRE ROZVÁDZAČE MERAČE SPOTREBY ENERGIE MONITORY ENERGIE ANALYZÁTORY KVALITY ENERGIE PRÚDOVÉ TRANSFORMÁTORY BOČNÍKY ANALÓGOVÉ PANELOVÉ MERAČE DIGITÁLNE PANELOVÉ MERAČE MICRONIX spol. s r.o. -
DIGITÁLNY MULTIMETER AX-100
 DIGITÁLNY MULTIMETER AX-100 NÁVOD NA OBSLUHU 1. Bezpečnostné pokyny 1. Na vstup zariadenia neprivádzajte veličiny presahujúce maximálne prípustné hodnoty. 2. Ak sa chcete vyhnúť úrazom elektrickým prúdom,
DIGITÁLNY MULTIMETER AX-100 NÁVOD NA OBSLUHU 1. Bezpečnostné pokyny 1. Na vstup zariadenia neprivádzajte veličiny presahujúce maximálne prípustné hodnoty. 2. Ak sa chcete vyhnúť úrazom elektrickým prúdom,
Rozsah akreditácie 1/5. Príloha zo dňa k osvedčeniu o akreditácii č. K-003
 Rozsah akreditácie 1/5 Názov akreditovaného subjektu: U. S. Steel Košice, s.r.o. Oddelenie Metrológia a, Vstupný areál U. S. Steel, 044 54 Košice Rozsah akreditácie Oddelenia Metrológia a : Laboratórium
Rozsah akreditácie 1/5 Názov akreditovaného subjektu: U. S. Steel Košice, s.r.o. Oddelenie Metrológia a, Vstupný areál U. S. Steel, 044 54 Košice Rozsah akreditácie Oddelenia Metrológia a : Laboratórium
Elektrický prúd v kovoch
 Elektrický prúd v kovoch 1. Aký náboj prejde prierezom vodiča za 2 h, ak ním tečie stály prúd 20 ma? [144 C] 2. Prierezom vodorovného vodiča prejde za 1 s usmerneným pohybom 1 000 elektrónov smerom doľava.
Elektrický prúd v kovoch 1. Aký náboj prejde prierezom vodiča za 2 h, ak ním tečie stály prúd 20 ma? [144 C] 2. Prierezom vodorovného vodiča prejde za 1 s usmerneným pohybom 1 000 elektrónov smerom doľava.
ELEKTRONICKÉ STABILIZAČNÉ SYSTÉMY V AUTOMOBILOCH
 ELEKTRONICKÉ STABILIZAČNÉ SYSTÉMY V AUTOMOBILOCH 2015 Teoretická časť - charakterizovať elektronické stabilizačné systémy v automobiloch, ktoré preukázateľne prispievajú k zvýšeniu bezpečnosti na cestách.
ELEKTRONICKÉ STABILIZAČNÉ SYSTÉMY V AUTOMOBILOCH 2015 Teoretická časť - charakterizovať elektronické stabilizačné systémy v automobiloch, ktoré preukázateľne prispievajú k zvýšeniu bezpečnosti na cestách.
Ohmov zákon pre uzavretý elektrický obvod
 Ohmov zákon pre uzavretý elektrický obvod Fyzikálny princíp: Každý reálny zdroj napätia (batéria, akumulátor) môžeme považova za sériovú kombináciu ideálneho zdroja s elektromotorickým napätím U e a vnútorným
Ohmov zákon pre uzavretý elektrický obvod Fyzikálny princíp: Každý reálny zdroj napätia (batéria, akumulátor) môžeme považova za sériovú kombináciu ideálneho zdroja s elektromotorickým napätím U e a vnútorným
Pevné ložiská. Voľné ložiská
 SUPPORTS D EXTREMITES DE PRECISION - SUPPORT UNIT FOR BALLSCREWS LOŽISKA PRE GULIČKOVÉ SKRUTKY A TRAPÉZOVÉ SKRUTKY Výber správnej podpory konca uličkovej skrutky či trapézovej skrutky je dôležité pre správnu
SUPPORTS D EXTREMITES DE PRECISION - SUPPORT UNIT FOR BALLSCREWS LOŽISKA PRE GULIČKOVÉ SKRUTKY A TRAPÉZOVÉ SKRUTKY Výber správnej podpory konca uličkovej skrutky či trapézovej skrutky je dôležité pre správnu
MOSTÍKOVÁ METÓDA 1.ÚLOHA: 2.OPIS MERANÉHO PREDMETU: 3.TEORETICKÝ ROZBOR: 4.SCHÉMA ZAPOJENIA:
 1.ÚLOHA: MOSTÍKOVÁ METÓDA a, Odmerajte odpory predložených rezistorou pomocou Wheastonovho mostíka. b, Odmerajte odpory predložených rezistorou pomocou Mostíka ICOMET. c, Odmerajte odpory predložených
1.ÚLOHA: MOSTÍKOVÁ METÓDA a, Odmerajte odpory predložených rezistorou pomocou Wheastonovho mostíka. b, Odmerajte odpory predložených rezistorou pomocou Mostíka ICOMET. c, Odmerajte odpory predložených
HASLIM112V, HASLIM123V, HASLIM136V HASLIM112Z, HASLIM123Z, HASLIM136Z HASLIM112S, HASLIM123S, HASLIM136S
 PROUKTOVÝ LIST HKL SLIM č. sklad. karty / obj. číslo: HSLIM112V, HSLIM123V, HSLIM136V HSLIM112Z, HSLIM123Z, HSLIM136Z HSLIM112S, HSLIM123S, HSLIM136S fakturačný názov výrobku: HKL SLIMv 1,2kW HKL SLIMv
PROUKTOVÝ LIST HKL SLIM č. sklad. karty / obj. číslo: HSLIM112V, HSLIM123V, HSLIM136V HSLIM112Z, HSLIM123Z, HSLIM136Z HSLIM112S, HSLIM123S, HSLIM136S fakturačný názov výrobku: HKL SLIMv 1,2kW HKL SLIMv
Staromlynská 29, Bratislava tel: , fax: http: //www.ecssluzby.sk SLUŽBY s. r. o.
 SLUŽBY s. r. o. Staromlynská 9, 81 06 Bratislava tel: 0 456 431 49 7, fax: 0 45 596 06 http: //www.ecssluzby.sk e-mail: ecs@ecssluzby.sk Asynchrónne elektromotory TECHNICKÁ CHARAKTERISTIKA. Nominálne výkony
SLUŽBY s. r. o. Staromlynská 9, 81 06 Bratislava tel: 0 456 431 49 7, fax: 0 45 596 06 http: //www.ecssluzby.sk e-mail: ecs@ecssluzby.sk Asynchrónne elektromotory TECHNICKÁ CHARAKTERISTIKA. Nominálne výkony
ARMA modely čast 2: moving average modely (MA)
") ARMA modely čast 2: moving average modely (MA) Beáta Stehlíková Časové rady, FMFI UK, 2014/2015 ARMA modely časť 2: moving average modely(ma) p.1/24 V. Moving average proces prvého rádu - MA(1) ARMA modely
ARMA modely čast 2: moving average modely (MA) Beáta Stehlíková Časové rady, FMFI UK, 2014/2015 ARMA modely časť 2: moving average modely(ma) p.1/24 V. Moving average proces prvého rádu - MA(1) ARMA modely
Motivácia pojmu derivácia
 Derivácia funkcie Motivácia pojmu derivácia Zaujíma nás priemerná intenzita zmeny nejakej veličiny (dráhy, rastu populácie, veľkosti elektrického náboja, hmotnosti), vzhľadom na inú veličinu (čas, dĺžka)
Derivácia funkcie Motivácia pojmu derivácia Zaujíma nás priemerná intenzita zmeny nejakej veličiny (dráhy, rastu populácie, veľkosti elektrického náboja, hmotnosti), vzhľadom na inú veličinu (čas, dĺžka)
Model redistribúcie krvi
 .xlsx/pracovný postup Cieľ: Vyhodnoťte redistribúciu krvi na začiatku cirkulačného šoku pomocou modelu založeného na analógii s elektrickým obvodom. Úlohy: 1. Simulujte redistribúciu krvi v ľudskom tele
.xlsx/pracovný postup Cieľ: Vyhodnoťte redistribúciu krvi na začiatku cirkulačného šoku pomocou modelu založeného na analógii s elektrickým obvodom. Úlohy: 1. Simulujte redistribúciu krvi v ľudskom tele
ELEKTRICKÉ POLE. Elektrický náboj je základná vlastnosť častíc, je viazaný na častice látky a vyjadruje stav elektricky nabitých telies.
 ELEKTRICKÉ POLE 1. ELEKTRICKÝ NÁBOJ, COULOMBOV ZÁKON Skúmajme napr. trenie celuloidového pravítka látkou, hrebeň suché vlasy, mikrotén slabý prúd vody... Príčinou spomenutých javov je elektrický náboj,
ELEKTRICKÉ POLE 1. ELEKTRICKÝ NÁBOJ, COULOMBOV ZÁKON Skúmajme napr. trenie celuloidového pravítka látkou, hrebeň suché vlasy, mikrotén slabý prúd vody... Príčinou spomenutých javov je elektrický náboj,
Ekvačná a kvantifikačná logika
 a kvantifikačná 3. prednáška (6. 10. 004) Prehľad 1 1 (dokončenie) ekvačných tabliel Formula A je ekvačne dokázateľná z množiny axióm T (T i A) práve vtedy, keď existuje uzavreté tablo pre cieľ A ekvačných
a kvantifikačná 3. prednáška (6. 10. 004) Prehľad 1 1 (dokončenie) ekvačných tabliel Formula A je ekvačne dokázateľná z množiny axióm T (T i A) práve vtedy, keď existuje uzavreté tablo pre cieľ A ekvačných
Matematika prednáška 4 Postupnosti a rady 4.5 Funkcionálne rady - mocninové rady - Taylorov rad, MacLaurinov rad
 Matematika 3-13. prednáška 4 Postupnosti a rady 4.5 Funkcionálne rady - mocninové rady - Taylorov rad, MacLaurinov rad Erika Škrabul áková F BERG, TU Košice 15. 12. 2015 Erika Škrabul áková (TUKE) Taylorov
Matematika 3-13. prednáška 4 Postupnosti a rady 4.5 Funkcionálne rady - mocninové rady - Taylorov rad, MacLaurinov rad Erika Škrabul áková F BERG, TU Košice 15. 12. 2015 Erika Škrabul áková (TUKE) Taylorov
Z O S I L Ň O V A Č FEARLESS SÉRIA D
 FEARLESS SÉRIA D FEARLESS SÉRIA D Fearless 5000 D Fearless 2200 D Fearless 4000 D Fearless 1000 D FEARLESS SÉRIA D Vlastnosti: do 2 ohmov Class-D, vysoko výkonný digitálny kanálový subwoofer, 5 kanálový
FEARLESS SÉRIA D FEARLESS SÉRIA D Fearless 5000 D Fearless 2200 D Fearless 4000 D Fearless 1000 D FEARLESS SÉRIA D Vlastnosti: do 2 ohmov Class-D, vysoko výkonný digitálny kanálový subwoofer, 5 kanálový
Goniometrické rovnice a nerovnice. Základné goniometrické rovnice
 Goniometrické rovnice a nerovnice Definícia: Rovnice (nerovnice) obsahujúce neznámu x alebo výrazy s neznámou x ako argumenty jednej alebo niekoľkých goniometrických funkcií nazývame goniometrickými rovnicami
Goniometrické rovnice a nerovnice Definícia: Rovnice (nerovnice) obsahujúce neznámu x alebo výrazy s neznámou x ako argumenty jednej alebo niekoľkých goniometrických funkcií nazývame goniometrickými rovnicami
Modul pružnosti betónu
 f cm tan α = E cm 0,4f cm ε cl E = σ ε ε cul Modul pružnosti betónu α Autori: Stanislav Unčík Patrik Ševčík Modul pružnosti betónu Autori: Stanislav Unčík Patrik Ševčík Trnava 2008 Obsah 1 Úvod...7 2 Deformácie
f cm tan α = E cm 0,4f cm ε cl E = σ ε ε cul Modul pružnosti betónu α Autori: Stanislav Unčík Patrik Ševčík Modul pružnosti betónu Autori: Stanislav Unčík Patrik Ševčík Trnava 2008 Obsah 1 Úvod...7 2 Deformácie
UČEBNÉ TEXTY. Pracovný zošit č.7. Moderné vzdelávanie pre vedomostnú spoločnosť Elektrotechnické merania. Ing. Alžbeta Kršňáková
 Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Pracovný zošit č.7 Vzdelávacia
Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Pracovný zošit č.7 Vzdelávacia
Strana 1/5 Príloha k rozhodnutiu č. 544/2011/039/5 a k osvedčeniu o akreditácii č. K-052 zo dňa Rozsah akreditácie
 Strana 1/5 Rozsah akreditácie Názov akreditovaného subjektu: CHIRANALAB, s.r.o., Kalibračné laboratórium Nám. Dr. A. Schweitzera 194, 916 01 Stará Turá IČO: 36 331864 Kalibračné laboratórium s fixným rozsahom
Strana 1/5 Rozsah akreditácie Názov akreditovaného subjektu: CHIRANALAB, s.r.o., Kalibračné laboratórium Nám. Dr. A. Schweitzera 194, 916 01 Stará Turá IČO: 36 331864 Kalibračné laboratórium s fixným rozsahom
Cvičenie č. 4,5 Limita funkcie
 Cvičenie č. 4,5 Limita funkcie Definícia ity Limita funkcie (vlastná vo vlastnom bode) Nech funkcia f je definovaná na nejakom okolí U( ) bodu. Hovoríme, že funkcia f má v bode itu rovnú A, ak ( ε > )(
Cvičenie č. 4,5 Limita funkcie Definícia ity Limita funkcie (vlastná vo vlastnom bode) Nech funkcia f je definovaná na nejakom okolí U( ) bodu. Hovoríme, že funkcia f má v bode itu rovnú A, ak ( ε > )(
UČEBNÉ TEXTY. Pracovný zošit č.5. Moderné vzdelávanie pre vedomostnú spoločnosť Elektrotechnické merania. Ing. Alžbeta Kršňáková
 Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Pracovný zošit č.5 Vzdelávacia
Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Pracovný zošit č.5 Vzdelávacia
Odrušenie motorových vozidiel. Rušenie a jeho príčiny
 Odrušenie motorových vozidiel Každé elektrické zariadenie je prijímačom rušivých vplyvov a taktiež sa môže stať zdrojom rušenia. Stupne odrušenia: Základné odrušenie I. stupňa Základné odrušenie II. stupňa
Odrušenie motorových vozidiel Každé elektrické zariadenie je prijímačom rušivých vplyvov a taktiež sa môže stať zdrojom rušenia. Stupne odrušenia: Základné odrušenie I. stupňa Základné odrušenie II. stupňa
ETCR - prehľadový katalóg 2014
 ETCR - prehľadový katalóg 2014 OBSAH Bezkontaktné testery poradia fáz Kliešťové testery zemného odporu Bezkontaktné on-line testery zemného odporu Prístroje na meranie zemného odporu Inteligentné digitálne
ETCR - prehľadový katalóg 2014 OBSAH Bezkontaktné testery poradia fáz Kliešťové testery zemného odporu Bezkontaktné on-line testery zemného odporu Prístroje na meranie zemného odporu Inteligentné digitálne
Moderné vzdelávanie pre vedomostnú spoločnosť Projekt je spolufinancovaný zo zdrojov EÚ M A T E M A T I K A
 M A T E M A T I K A PRACOVNÝ ZOŠIT II. ROČNÍK Mgr. Agnesa Balážová Obchodná akadémia, Akademika Hronca 8, Rožňava PRACOVNÝ LIST 1 Urč typ kvadratickej rovnice : 1. x 2 3x = 0... 2. 3x 2 = - 2... 3. -4x
M A T E M A T I K A PRACOVNÝ ZOŠIT II. ROČNÍK Mgr. Agnesa Balážová Obchodná akadémia, Akademika Hronca 8, Rožňava PRACOVNÝ LIST 1 Urč typ kvadratickej rovnice : 1. x 2 3x = 0... 2. 3x 2 = - 2... 3. -4x
MERANIE OSCILOSKOPOM Ing. Alexander Szanyi
 STREDNÉ ODBORNÁ ŠKOLA Hviezdoslavova 5 Rožňava Cvičenia z elektrického merania Referát MERANIE OSCILOSKOPOM Ing. Alexander Szanyi Vypracoval Trieda Skupina Šk rok Teoria Hodnotenie Prax Referát Meranie
STREDNÉ ODBORNÁ ŠKOLA Hviezdoslavova 5 Rožňava Cvičenia z elektrického merania Referát MERANIE OSCILOSKOPOM Ing. Alexander Szanyi Vypracoval Trieda Skupina Šk rok Teoria Hodnotenie Prax Referát Meranie
UČEBNÉ TEXTY. Pracovný zošit č.2. Moderné vzdelávanie pre vedomostnú spoločnosť Elektrotechnické merania. Ing. Alžbeta Kršňáková
 Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Pracovný zošit č.2 Vzdelávacia
Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Pracovný zošit č.2 Vzdelávacia
16 Elektromagnetická indukcia
 251 16 Elektromagnetická indukcia Michal Faraday 1 v roku 1831 svojimi experimentmi objavil elektromagnetickú indukciu. Cieľom týchto experimentov bolo nájsť súvislosti medzi elektrickými a magnetickými
251 16 Elektromagnetická indukcia Michal Faraday 1 v roku 1831 svojimi experimentmi objavil elektromagnetickú indukciu. Cieľom týchto experimentov bolo nájsť súvislosti medzi elektrickými a magnetickými
u R Pasívne prvky R, L, C v obvode striedavého prúdu Činný odpor R Napätie zdroja sa rovná úbytku napätia na činnom odpore.
 Pasívne prvky, L, C v obvode stredavého prúdu Čnný odpor u u prebeh prúdu a napäta fázorový dagram prúdu a napäta u u /2 /2 t Napäte zdroja sa rovná úbytku napäta na čnnom odpore. Prúd je vo fáze s napätím.
Pasívne prvky, L, C v obvode stredavého prúdu Čnný odpor u u prebeh prúdu a napäta fázorový dagram prúdu a napäta u u /2 /2 t Napäte zdroja sa rovná úbytku napäta na čnnom odpore. Prúd je vo fáze s napätím.
16. Základne rovinné útvary kružnica a kruh
 16. Základne rovinné útvary kružnica a kruh Kružnica k so stredom S a polomerom r nazývame množinou všetkých bodov X v rovine, ktoré majú od pevného bodu S konštantnú vzdialenosť /SX/ = r, kde r (patri)
16. Základne rovinné útvary kružnica a kruh Kružnica k so stredom S a polomerom r nazývame množinou všetkých bodov X v rovine, ktoré majú od pevného bodu S konštantnú vzdialenosť /SX/ = r, kde r (patri)
Analýza poruchových stavov s využitím rôznych modelov transformátorov v programe EMTP-ATP
 Analýza poruchových stavov s využitím rôznych modelov transformátorov v programe EMTP-ATP 7 Obsah Analýza poruchových stavov pri skrate na sekundárnej strane transformátora... Nastavenie parametrov prvkov
Analýza poruchových stavov s využitím rôznych modelov transformátorov v programe EMTP-ATP 7 Obsah Analýza poruchových stavov pri skrate na sekundárnej strane transformátora... Nastavenie parametrov prvkov
1. Určenie VA charakteristiky kovového vodiča
 Laboratórne cvičenia podporované počítačom V charakteristika vodiča a polovodičovej diódy 1 Meno:...Škola:...Trieda:...Dátum:... 1. Určenie V charakteristiky kovového vodiča Fyzikálny princíp: Elektrický
Laboratórne cvičenia podporované počítačom V charakteristika vodiča a polovodičovej diódy 1 Meno:...Škola:...Trieda:...Dátum:... 1. Určenie V charakteristiky kovového vodiča Fyzikálny princíp: Elektrický
TECHNICKÁ UNIVERZITA V KOŠICIACH
 TECHNICKÁ UNIVERZITA V KOŠICIACH LETECKÁ FAKULTA Zariadenia na odstránenie nestabilnej práce osových kompresorov LTKM Roman GÁŠPÁR ROČNÍKOVÝ PROJEKT 2009 TECHNICKÁ UNIVERZITA V KOŠICIACH LETECKÁ FAKULTA
TECHNICKÁ UNIVERZITA V KOŠICIACH LETECKÁ FAKULTA Zariadenia na odstránenie nestabilnej práce osových kompresorov LTKM Roman GÁŠPÁR ROČNÍKOVÝ PROJEKT 2009 TECHNICKÁ UNIVERZITA V KOŠICIACH LETECKÁ FAKULTA
URČENIE MOMENTU ZOTRVAČNOSTI FYZIKÁLNEHO KYVADLA
 54 URČENE MOMENTU ZOTRVAČNOST FYZKÁLNEHO KYVADLA Teoretický úvod: Fyzikálnym kyvadlom rozumieme teleso (napr. dosku, tyč), ktoré vykonáva periodický kmitavý pohyb okolo osi, ktorá neprechádza ťažiskom.
54 URČENE MOMENTU ZOTRVAČNOST FYZKÁLNEHO KYVADLA Teoretický úvod: Fyzikálnym kyvadlom rozumieme teleso (napr. dosku, tyč), ktoré vykonáva periodický kmitavý pohyb okolo osi, ktorá neprechádza ťažiskom.
Meranie krútiaceho momentu
 Marios Cassimatis, Peter Herbert Osanna, Ali Af Jehi-Sadat, Jean-Michel Ruiz 20.1 Úvod Krútiaci moment predstavuje silu, ktorá sa snaží spôsobiť otáčanie. Krútiaci moment hrá v priemysle dôležitú úlohu,
Marios Cassimatis, Peter Herbert Osanna, Ali Af Jehi-Sadat, Jean-Michel Ruiz 20.1 Úvod Krútiaci moment predstavuje silu, ktorá sa snaží spôsobiť otáčanie. Krútiaci moment hrá v priemysle dôležitú úlohu,
Základné poznatky molekulovej fyziky a termodynamiky
 Základné poznatky molekulovej fyziky a termodynamiky Opakovanie učiva II. ročníka, Téma 1. A. Príprava na maturity z fyziky, 2008 Outline Molekulová fyzika 1 Molekulová fyzika Predmet Molekulovej fyziky
Základné poznatky molekulovej fyziky a termodynamiky Opakovanie učiva II. ročníka, Téma 1. A. Príprava na maturity z fyziky, 2008 Outline Molekulová fyzika 1 Molekulová fyzika Predmet Molekulovej fyziky
RIEŠENIE WHEATSONOVHO MOSTÍKA
 SNÁ PMYSLNÁ ŠKOL LKONKÁ V PŠŤNO KOMPLXNÁ PÁ Č. / ŠN WSONOVO MOSÍK Piešťany, október 00 utor : Marek eteš. Komplexná práca č. / Strana č. / Obsah:. eoretický rozbor Wheatsonovho mostíka. eoretický rozbor
SNÁ PMYSLNÁ ŠKOL LKONKÁ V PŠŤNO KOMPLXNÁ PÁ Č. / ŠN WSONOVO MOSÍK Piešťany, október 00 utor : Marek eteš. Komplexná práca č. / Strana č. / Obsah:. eoretický rozbor Wheatsonovho mostíka. eoretický rozbor
Jednotkový koreň (unit root), diferencovanie časového radu, unit root testy
, diferencovanie časového radu, unit root testy") Jednotkový koreň (unit root), diferencovanie časového radu, unit root testy Beáta Stehlíková Časové rady, FMFI UK, 2012/2013 Jednotkový koreň(unit root),diferencovanie časového radu, unit root testy p.1/18
Jednotkový koreň (unit root), diferencovanie časového radu, unit root testy Beáta Stehlíková Časové rady, FMFI UK, 2012/2013 Jednotkový koreň(unit root),diferencovanie časového radu, unit root testy p.1/18
ZADANIE 1_ ÚLOHA 3_Všeobecná rovinná silová sústava ZADANIE 1 _ ÚLOHA 3
 ZDNIE _ ÚLOH 3_Všeobecná rovinná silová sústv ZDNIE _ ÚLOH 3 ÚLOH 3.: Vypočítjte veľkosti rekcií vo väzbách nosník zťženého podľ obrázku 3.. Veľkosti známych síl, momentov dĺžkové rozmery sú uvedené v
ZDNIE _ ÚLOH 3_Všeobecná rovinná silová sústv ZDNIE _ ÚLOH 3 ÚLOH 3.: Vypočítjte veľkosti rekcií vo väzbách nosník zťženého podľ obrázku 3.. Veľkosti známych síl, momentov dĺžkové rozmery sú uvedené v
Nestacionárne magnetické pole
 Magnetické pole 1. 1.Vodič s dĺžkou 8 cm je umiestnený kolmo na indukčné čiary magnetického poľa s magnetickou indukciou 2,12 T. Určte veľkosť sily pôsobiacej na vodič, ak ním prechádza prúd 5 A. [F =
Magnetické pole 1. 1.Vodič s dĺžkou 8 cm je umiestnený kolmo na indukčné čiary magnetického poľa s magnetickou indukciou 2,12 T. Určte veľkosť sily pôsobiacej na vodič, ak ním prechádza prúd 5 A. [F =
KLP-100 / KLP-104 / KLP-108 / KLP-112 KLP-P100 / KLP-P104 / KLP-P108 / KLP-P112 KHU-102P / KVM-520 / KIP-603 / KVS-104P
 Inštalačný manuál KLP-100 / KLP-104 / KLP-108 / KLP-112 KLP-P100 / KLP-P104 / KLP-P108 / KLP-P112 KHU-102P / KVM-520 / KIP-603 / KVS-104P EXIM Alarm s.r.o. Solivarská 50 080 01 Prešov Tel/Fax: 051 77 21
Inštalačný manuál KLP-100 / KLP-104 / KLP-108 / KLP-112 KLP-P100 / KLP-P104 / KLP-P108 / KLP-P112 KHU-102P / KVM-520 / KIP-603 / KVS-104P EXIM Alarm s.r.o. Solivarská 50 080 01 Prešov Tel/Fax: 051 77 21
Návod na montáž. a prevádzku. MOVIMOT pre energeticky úsporné motory. Vydanie 10/ / SK GC110000
 Prevodové motory \ Priemyselné pohony \ Elektronika pohonov \ Automatizácia pohonov \ Servis MOVIMOT pre energeticky úsporné motory GC110000 Vydanie 10/05 11402822 / SK Návod na montáž a prevádzku SEW-EURODRIVE
Prevodové motory \ Priemyselné pohony \ Elektronika pohonov \ Automatizácia pohonov \ Servis MOVIMOT pre energeticky úsporné motory GC110000 Vydanie 10/05 11402822 / SK Návod na montáž a prevádzku SEW-EURODRIVE
Prevodník pre tenzometrické snímače sily EMS170
 Charakteristické vlastnosti Technické údaje Napäťové alebo prúdové napájanie snímačov alebo vodičové pripojenie snímačov Pripojenie až snímačov Nastavenie parametrov pomocou DIP prepínačov Prevedenie v
Charakteristické vlastnosti Technické údaje Napäťové alebo prúdové napájanie snímačov alebo vodičové pripojenie snímačov Pripojenie až snímačov Nastavenie parametrov pomocou DIP prepínačov Prevedenie v
Rozsah hodnotenia a spôsob výpočtu energetickej účinnosti rozvodu tepla
 Rozsah hodnotenia a spôsob výpočtu energetickej účinnosti príloha č. 7 k vyhláške č. 428/2010 Názov prevádzkovateľa verejného : Spravbytkomfort a.s. Prešov Adresa: IČO: Volgogradská 88, 080 01 Prešov 31718523
Rozsah hodnotenia a spôsob výpočtu energetickej účinnosti príloha č. 7 k vyhláške č. 428/2010 Názov prevádzkovateľa verejného : Spravbytkomfort a.s. Prešov Adresa: IČO: Volgogradská 88, 080 01 Prešov 31718523
6 APLIKÁCIE FUNKCIE DVOCH PREMENNÝCH
 6 APLIKÁCIE FUNKCIE DVOCH PREMENNÝCH 6. Otázky Definujte pojem produkčná funkcia. Definujte pojem marginálny produkt. 6. Produkčná funkcia a marginálny produkt Definícia 6. Ak v ekonomickom procese počet
6 APLIKÁCIE FUNKCIE DVOCH PREMENNÝCH 6. Otázky Definujte pojem produkčná funkcia. Definujte pojem marginálny produkt. 6. Produkčná funkcia a marginálny produkt Definícia 6. Ak v ekonomickom procese počet
Vyhlásenie o parametroch stavebného výrobku StoPox GH 205 S
 1 / 5 Vyhlásenie o parametroch stavebného výrobku StoPox GH 205 S Identifikačný kód typu výrobku PROD2141 StoPox GH 205 S Účel použitia EN 1504-2: Výrobok slúžiaci na ochranu povrchov povrchová úprava
1 / 5 Vyhlásenie o parametroch stavebného výrobku StoPox GH 205 S Identifikačný kód typu výrobku PROD2141 StoPox GH 205 S Účel použitia EN 1504-2: Výrobok slúžiaci na ochranu povrchov povrchová úprava
Prostriedky automatického riadenia
 LOGO A u t o m a t i z á c i a p r i e m y s e l n ý c h t e c h n o l ó g i í Prostriedky automatického riadenia 12709 Technika ochrany životného prostredia Obsah 1 Styk riadeného objektu s okolím 2 Snímače
LOGO A u t o m a t i z á c i a p r i e m y s e l n ý c h t e c h n o l ó g i í Prostriedky automatického riadenia 12709 Technika ochrany životného prostredia Obsah 1 Styk riadeného objektu s okolím 2 Snímače
Harmonizované technické špecifikácie Trieda GP - CS lv EN Pevnosť v tlaku 6 N/mm² EN Prídržnosť
 Baumit Prednástrek / Vorspritzer Vyhlásenie o parametroch č.: 01-BSK- Prednástrek / Vorspritzer 1. Jedinečný identifikačný kód typu a výrobku: Baumit Prednástrek / Vorspritzer 2. Typ, číslo výrobnej dávky
Baumit Prednástrek / Vorspritzer Vyhlásenie o parametroch č.: 01-BSK- Prednástrek / Vorspritzer 1. Jedinečný identifikačný kód typu a výrobku: Baumit Prednástrek / Vorspritzer 2. Typ, číslo výrobnej dávky
24. Základné spôsoby zobrazovania priestoru do roviny
 24. Základné spôsoby zobrazovania priestoru do roviny Voľné rovnobežné premietanie Presné metódy zobrazenia trojrozmerného priestoru do dvojrozmernej roviny skúma samostatná matematická disciplína, ktorá
24. Základné spôsoby zobrazovania priestoru do roviny Voľné rovnobežné premietanie Presné metódy zobrazenia trojrozmerného priestoru do dvojrozmernej roviny skúma samostatná matematická disciplína, ktorá
Laboratórna práca č.1. Elektrické meracie prístroje a ich zapájanie do elektrického obvodu.zapojenie potenciometra a reostatu.
 Laboratórna práca č.1 Elektrické meracie prístroje a ich zapájanie do elektrického obvodu.zapojenie potenciometra a reostatu. Zapojenie potenciometra Zapojenie reostatu 1 Zapojenie ampémetra a voltmetra
Laboratórna práca č.1 Elektrické meracie prístroje a ich zapájanie do elektrického obvodu.zapojenie potenciometra a reostatu. Zapojenie potenciometra Zapojenie reostatu 1 Zapojenie ampémetra a voltmetra
9. SNÍMANIE MECHANICKÝCH VELIČÍN
 9 SNÍMANIE MECHANICKÝCH VELIČÍN rýchlosť (priamočiara) otáčky sila moment zrýchlenie 91 Priamočiara rýchlosť - snímanie problematické (pre väčšie rozsahy pohybov): prevod na rotačný pohyb (otáčky) derívácia
9 SNÍMANIE MECHANICKÝCH VELIČÍN rýchlosť (priamočiara) otáčky sila moment zrýchlenie 91 Priamočiara rýchlosť - snímanie problematické (pre väčšie rozsahy pohybov): prevod na rotačný pohyb (otáčky) derívácia
UČEBNÉ TEXTY. Odborné predmety. Časti strojov. Druhý. Hriadele, čapy. Ing. Romana Trnková
 Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Vzdelávacia oblasť: Predmet:
Stredná priemyselná škola dopravná, Sokolská 911/94, 960 01 Zvolen Kód ITMS projektu: 26110130667 Názov projektu: Zvyšovanie flexibility absolventov v oblasti dopravy UČEBNÉ TEXTY Vzdelávacia oblasť: Predmet:
Miniatúrne a motorové stýkače, stýkače kondenzátora, pomocné stýkače a nadprúdové relé
 Motorové stýkače Použitie: Stýkače sa používajú na diaľkové ovládanie a ochranu (v kombinácii s nadprúdovými relé) elektrických motorov a iných elektrických spotrebičov s menovitým výkonom do 160 kw (pri
Motorové stýkače Použitie: Stýkače sa používajú na diaľkové ovládanie a ochranu (v kombinácii s nadprúdovými relé) elektrických motorov a iných elektrických spotrebičov s menovitým výkonom do 160 kw (pri
Transformátory 1. Obr. 1 Dvojvinuťový transformátor. Na Obr. 1 je naznačený rez dvojvinuťovým transformátorom, pre ktorý platia rovnice:
 Transformátory 1 TRANSFORÁTORY Obr. 1 Dvojvinuťový transformátor Na Obr. 1 je naznačený rez dvojvinuťovým transformátorom, pre ktorý platia rovnice: u d dt Φ Φ N i R d = Φ Φ N i R (1) dt 1 = ( 0+ 1) 1+
Transformátory 1 TRANSFORÁTORY Obr. 1 Dvojvinuťový transformátor Na Obr. 1 je naznačený rez dvojvinuťovým transformátorom, pre ktorý platia rovnice: u d dt Φ Φ N i R d = Φ Φ N i R (1) dt 1 = ( 0+ 1) 1+
1. VZNIK ELEKTRICKÉHO PRÚDU
 ELEKTRICKÝ PRÚD 1. VZNIK ELEKTRICKÉHO PRÚDU ELEKTRICKÝ PRÚD - Je usporiadaný pohyb voľných častíc s elektrickým nábojom. Podmienkou vzniku elektrického prúdu v látke je: prítomnosť voľných častíc s elektrickým
ELEKTRICKÝ PRÚD 1. VZNIK ELEKTRICKÉHO PRÚDU ELEKTRICKÝ PRÚD - Je usporiadaný pohyb voľných častíc s elektrickým nábojom. Podmienkou vzniku elektrického prúdu v látke je: prítomnosť voľných častíc s elektrickým
SonoMeter 31 Merače energií
 SonoMeter 31 Merače energií Popis Osvedčenie o typovej skúške MID č.: LT-1621-MI004-023 SonoMeter 31 od spoločnosti Danfoss je rad ultrazvukových kompaktných meračov energií, ktoré slúžia na meranie spotreby
SonoMeter 31 Merače energií Popis Osvedčenie o typovej skúške MID č.: LT-1621-MI004-023 SonoMeter 31 od spoločnosti Danfoss je rad ultrazvukových kompaktných meračov energií, ktoré slúžia na meranie spotreby
Motivácia Denícia determinantu Výpo et determinantov Determinant sú inu matíc Vyuºitie determinantov. Determinanty. 14. decembra 2010.
 14. decembra 2010 Rie²enie sústav Plocha rovnobeºníka Objem rovnobeºnostena Rie²enie sústav Príklad a 11 x 1 + a 12 x 2 = c 1 a 21 x 1 + a 22 x 2 = c 2 Dostaneme: x 1 = c 1a 22 c 2 a 12 a 11 a 22 a 12
14. decembra 2010 Rie²enie sústav Plocha rovnobeºníka Objem rovnobeºnostena Rie²enie sústav Príklad a 11 x 1 + a 12 x 2 = c 1 a 21 x 1 + a 22 x 2 = c 2 Dostaneme: x 1 = c 1a 22 c 2 a 12 a 11 a 22 a 12
1. OBVODY JEDNOSMERNÉHO PRÚDU. (Aktualizované )
") . OVODY JEDNOSMENÉHO PÚDU. (ktualizované 7..005) Príklad č..: Vypočítajte hodnotu odporu p tak, aby merací systém S ukazoval plnú výchylku pri V. p=? V Ω, V S Príklad č..: ký bude stratový výkon vedenia?
. OVODY JEDNOSMENÉHO PÚDU. (ktualizované 7..005) Príklad č..: Vypočítajte hodnotu odporu p tak, aby merací systém S ukazoval plnú výchylku pri V. p=? V Ω, V S Príklad č..: ký bude stratový výkon vedenia?
a = PP x = A.sin α vyjadruje okamžitú hodnotu sínusového priebehu
 Striedavý prúd Viliam Kopecký Použitá literatúra: - štúdijné texty a učebnice uverejnené na webe, - štúdijné texty, videa a vedomostné databázy spoločnosti MARKAB s.r.o., Žilina Vznik a veličiny striedavého
Striedavý prúd Viliam Kopecký Použitá literatúra: - štúdijné texty a učebnice uverejnené na webe, - štúdijné texty, videa a vedomostné databázy spoločnosti MARKAB s.r.o., Žilina Vznik a veličiny striedavého
ARMA modely čast 2: moving average modely (MA)
") ARMA modely čast 2: moving average modely (MA) Beáta Stehlíková Časové rady, FMFI UK, 2011/2012 ARMA modely časť 2: moving average modely(ma) p.1/25 V. Moving average proces prvého rádu - MA(1) ARMA modely
ARMA modely čast 2: moving average modely (MA) Beáta Stehlíková Časové rady, FMFI UK, 2011/2012 ARMA modely časť 2: moving average modely(ma) p.1/25 V. Moving average proces prvého rádu - MA(1) ARMA modely
3. Meranie indukčnosti
 3. Meranie indukčnosti Vlastná indukčnosť pasívna elektrická veličina charakterizujúca vlastnú indukciu, symbol, jednotka v SI Henry, symbol jednotky H, základná vlastnosť cievok. V cievke, v ktorej sa
3. Meranie indukčnosti Vlastná indukčnosť pasívna elektrická veličina charakterizujúca vlastnú indukciu, symbol, jednotka v SI Henry, symbol jednotky H, základná vlastnosť cievok. V cievke, v ktorej sa
Stredná priemyselná škola Poprad. Výkonové štandardy v predmete ELEKTROTECHNIKA odbor elektrotechnika 2.ročník
 Výkonové štandardy v predmete ELEKTROTECHNIKA odbor elektrotechnika 2.ročník Žiak vie: Teória ELEKTROMAGNETICKÁ INDUKCIA 1. Vznik indukovaného napätia popísať základné veličiny magnetického poľa a ich
Výkonové štandardy v predmete ELEKTROTECHNIKA odbor elektrotechnika 2.ročník Žiak vie: Teória ELEKTROMAGNETICKÁ INDUKCIA 1. Vznik indukovaného napätia popísať základné veličiny magnetického poľa a ich
Pohony vzduchových klapiek
 4 634 OpenAir T Pohony vzduchových klapiek Otočné verzie,, 230 V ~ GDB...1 GLB...1 GSF...1 Elektromotorické otočné pohony s trojpolohovým a spojitým ovládaním, menovitý krútiaci moment 10 Nm (GDB) / 10
4 634 OpenAir T Pohony vzduchových klapiek Otočné verzie,, 230 V ~ GDB...1 GLB...1 GSF...1 Elektromotorické otočné pohony s trojpolohovým a spojitým ovládaním, menovitý krútiaci moment 10 Nm (GDB) / 10
Metódy vol nej optimalizácie
 Metódy vol nej optimalizácie Metódy vol nej optimalizácie p. 1/28 Motivácia k metódam vol nej optimalizácie APLIKÁCIE p. 2/28 II 1. PRÍKLAD: Lineárna regresia - metóda najmenších štvorcov Na základe dostupných
Metódy vol nej optimalizácie Metódy vol nej optimalizácie p. 1/28 Motivácia k metódam vol nej optimalizácie APLIKÁCIE p. 2/28 II 1. PRÍKLAD: Lineárna regresia - metóda najmenších štvorcov Na základe dostupných
1. Limita, spojitost a diferenciálny počet funkcie jednej premennej
 . Limita, spojitost a diferenciálny počet funkcie jednej premennej Definícia.: Hromadný bod a R množiny A R: v každom jeho okolí leží aspoň jeden bod z množiny A, ktorý je rôzny od bodu a Zadanie množiny
. Limita, spojitost a diferenciálny počet funkcie jednej premennej Definícia.: Hromadný bod a R množiny A R: v každom jeho okolí leží aspoň jeden bod z množiny A, ktorý je rôzny od bodu a Zadanie množiny
KATALÓG KRUHOVÉ POTRUBIE
 H KATALÓG KRUHOVÉ POTRUBIE 0 Základné požiadavky zadávania VZT potrubia pre výrobu 1. Zadávanie do výroby v spoločnosti APIAGRA s.r.o. V digitálnej forme na tlačive F05-8.0_Rozpis_potrubia, zaslané mailom
H KATALÓG KRUHOVÉ POTRUBIE 0 Základné požiadavky zadávania VZT potrubia pre výrobu 1. Zadávanie do výroby v spoločnosti APIAGRA s.r.o. V digitálnej forme na tlačive F05-8.0_Rozpis_potrubia, zaslané mailom
Materiály pro vakuové aparatury
 Materiály pro vakuové aparatury nízká tenze par malá desorpce plynu tepelná odolnost (odplyňování) mechanické vlastnosti způsoby opracování a spojování elektrické a chemické vlastnosti Vakuová fyzika 2
Materiály pro vakuové aparatury nízká tenze par malá desorpce plynu tepelná odolnost (odplyňování) mechanické vlastnosti způsoby opracování a spojování elektrické a chemické vlastnosti Vakuová fyzika 2
Senzory II. Ing. Pavol Dolinský KEMT FEI TU Košice 2015
 Senzory II. Ing. Pavol Dolinský KEMT FEI TU Košice 2015 Teplota Teplota je termodynamická stavová veličina a určuje ju stredná kinetická energia neusporiadaného pohybu molekúl. Základnou jednotkou je Kelvin
Senzory II. Ing. Pavol Dolinský KEMT FEI TU Košice 2015 Teplota Teplota je termodynamická stavová veličina a určuje ju stredná kinetická energia neusporiadaného pohybu molekúl. Základnou jednotkou je Kelvin