ASINKRONI STROJEVI I POGONI
|
|
|
- Διόσκουροι Αποστόλου
- 8 χρόνια πριν
- Προβολές:
Transcript
1 FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ELEKTROMEHANIČKE I ELEKTRIČNE PRETVORBE ENERGIJE ASINKRONI STROJEVI I POGONI Izv.prof.dr.sc. Damir Žarko ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU Ak. god. 2014/2015 Zagreb,
2 Strojevi izmjenične struje Strojevi izmjeničnestruje sedijele na: Sinkrone, Asinkrone i Izmjenične kolektorske (komutatorske). Nikola Tesla je god. patentirao i javnosti prikazao svoj novo izumljeni motor (patentno ime, Electro Magnetic Motor ) u kojemu prvi puta objašnjava stvaranje i primjenu okretnog magnetskog polja. Sinkroni i i asinkroni i električni i strojevi rade na principu i okretnog magnetskog polja. 2
3 Osnovne podjele asinkronih strojeva Prema obliku gibanja Rotirajući(engl. rotating machines), Linearni (engl. linearmachines). Prema izvedbi rotora Asinkroni strojevi s kaveznim rotorom ( engl. squirrel cage rotor induction motors), Asinkroni strojevi s kliznokolutnim (namotanim) rotorom ( engl. wound rotor induction motors or slipring induction motors), Asinkroni strojevi s masivnim rotorom (engl. massive rotor induction motors). Prema broju faza i priključku na izvor napona Trofazni, dvofazni i jednofazni (za male snage). Prema veličini nazivnog napona Visokonaponski (iznad 1000V do V) i niskonaponski (do 1000V). Prema pretvorbi energije Asinkroni motori, Asinkroni generatori. 3
4 Suvremene izvedbe asinkronih strojeva i pogona Današnji asinkroni strojevi se po konstrukciji i tehnologiji bitno razlikuju od strojeva iz vremena Nikole Tesle, Ferarisa i Dobrovoljskog. Princip rada je ostao isti. Neke suvremene industrijske izvedbe kompletnog asinkronog stroja ili njegovih dijelova su prikazani na sljedećim slajdovima. 4
5 Suvremeni asinkroni kavezni motor s aluminijskim kavezom na rotoru PRIKLJUČNA KUTIJA GLAVE NAMOTA VENTILATOR KRATKOSPOJNI PRSTEN OSOVINA (magnetski ili nemagnetski čelik) LEŽAJ STATORSKI PAKET KUĆIŠTE ROTORSKI PAKET 5





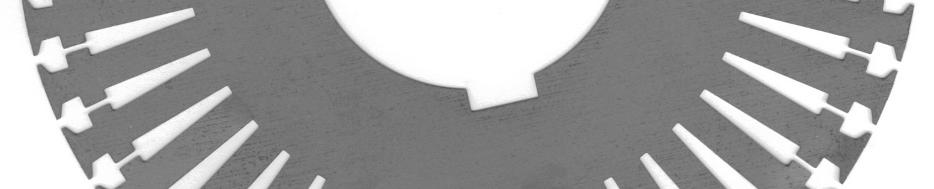

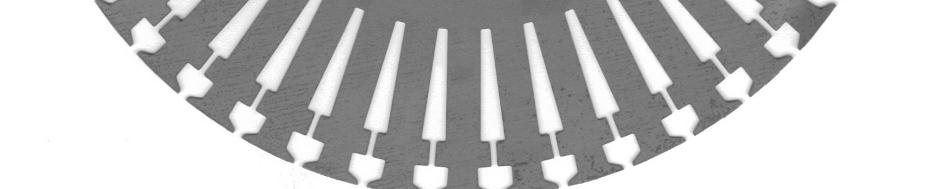

6 Rotorski lim asinkronog kaveznog motora a) aluminijski dvokavezni rotor b) bakreni kavez a) b) 6
7 Statorski paket (jezgra) trofaznog asinkronog motora pripremljen za ulaganje namota 7
8 Stator novog asinkronog motora za visoki napon (6 10 kv, 50 Hz) Pogled na glave namota i izvode do priključne kutije 8
9 Ulaganje namota u statorski paket trofaznog asinkronog motora (400 V, 50 Hz) 9
10 Kavezni rotor trofaznog asinkronog motora u fazi završne izrade (motor za električnu vuču) 10
11 Kavezni rotor trofaznog asinkronog motora opće namjene nakon završne obrade 11
12 Rotor trofaznog asinkronog motora s kliznim kolutima Klizni koluti 12
13 Neke tipične primjene asinkronih strojeva 13
14 Strojarnica u TE TO Osijek Jednu fotografiju motora iz termoelektrane Napojna kotlovska pumpa Pogonski elektromotor lk 14
15 Motori naftovodnih pumpi u terminalu Omišalj, 6000 V, 50 Hz (Protueksplozijska zaštita oklapanjem) Naftovodni terminal Omišalj 15
16 Asinkroni motori povećane sigurnosti, Terminal Sisak 1900 kw, 6000 V, 50 Hz, 2p=2 Terminal Sisak 16
17 Elektromotorni pogon procesne pumpe, motor 1800 kw, 2p=2, frekvencijski reguliran Pumpa Motor Spojka Turbina 17
18 Asinkroni motor 350 kw, 2p=2, 400V, za pogon vijčanog kompresora na plinskoj bušotini 18

19 Električna vuča pogon tramvaja TMK2200 Pogonski asinkroni motor Snaga: 85 kw Napon: 400 V Brzina vrtnje pri 400 V: 2125 min 1 Nazivna struja: 150 A Maksimalna struja: 300 A Maksimalna brzina: 4580 min 1 Klasa izolacije: 200 Mehanička zaštita: IP 20 Hlađenje: IC01 Masa: 350 kg Standard: IEC
20 Dvostrano napajani asinkroni generator (DFIG) vjetroagregata promjenljive brzine vrtnje Mreža Multiplikator Asinkroni generator Turbina Elektronički učinski pretvarač 20
21 Okretno magnetsko polje (1) Da bi se stvorilo bilo kakvo okretno magnetsko polje moraju postojati na statoru barem dva namota, pomaknuta međusobno prostorno za neki kut, a struje koje u njima teku moraju međusobno biti fazno pomaknute za neki kut. Ako su prostorni pomaci između potpuno simetričnih faznih namota jednaki vremenskim pomacima između potpuno simetričnih faznih struja koje kroz njih teku, stvarat će se simetrično (kružno) okretno magnetsko polje. Ako postoje prostorni pomaci između namota i vremenski pomaci između struja, stvarat će se okretna protjecanja koja nisu simetrična (kružna) nego su nesimetrična (eliptična). Da li će motor raditi kao sinkroni ili asinkroni zavisi o tome kako mu je izveden rotor. Statori sinkronog i asinkronog motora se ne razlikuje. U njemu struje trebajustvoriti t okretno magnetsko tk polje. 21
22 Okretno magnetsko polje (2) Okretno magnetsko polje stvoreno u statorskim namotima protjecanima izmjeničnim fazno pomaknutim strujama vrti se sinkronom brzinom vrtnje: n s 60 f p s,o/min gdje je f s frekvencija struja, a p broj pari polova motora. Okretno magnetsko polje inducira u vodičima rotora napone koji kroz namot rotora protjeraju struje. Interakcijom struja rotora i okretnog mag. polja stvara se sila na vodiče rotorakoja zakreće rotorusmjeru vrtnje okretnogpolja. Ako je moment svih sila na vodiče rotora veći od momenta otpora vrtnji, rotor će se vrtjeti brzinom koja je uvijek različita od brzine vrtnje okretnog polja, te se zbog toga motor zove asinkroni*. *asinkrono koje nije sinkrono, nije istovremeno sinkrono kojejesnečim ili nekim sinkrono, istovremeno 22
23 Pojam klizanja asinkronog stroja (1) Okretno polje se vrti u odnosu na stator sinkronom brzinom n s = 60f/p, o/min Rotor se vrti brzinom vrtnje n, o/min Razlika brzine vrtnje rotora (mehaničke brzine) i brzine vrtnje okretnog polja naziva se klizanje i računa se prema izrazu: n s n s n s 23
24 Pojam klizanja asinkronog stroja (2) Brzina vrtnje rotora je nakon definicije klizanja s: 60 f n n (1 s ) s (1 s ) s p Brzina vrtnje rotora može teoretski biti bilo koja vrijednost, pa odnosi između nje i klizanja s izgledaju kao na slici. rotor se vrti sinkronom brzinom s = 0 dok rotor stoji (zakočen) s = 1 brzina vrtnje rotora manja od sinkrone s >0 rotor se vrti brže od okretnog polja s < 0 rotor se vrti u suprotnom smjeru (n<0) od okretnog polja s > 1 24
25 Pojam klizanja asinkronog stroja (3) Klizanje u tehnički prihvatljivim iznosima mora biti sasvim mala veličina (zbog utjecaja na gubitke energije) te se zbog n toga n iskazuje u postocima. s s[%] 100% n s Klizanje se obično kreće između 0.1i5%.Veća vrijednost odnosi se na motore manjih snaga (do oko 1 kw). Primjer iz kataloga: Motor snage 180 W, 400 V, 50 HZ, 2p = 2 ima brzinu vrtnje pri nazivnom opterećenju 2900 o/min. Klizanje je n n s s 100 3,33% n s 3000 Motor snage 1 MW, 10 kv, 50 Hz, 2p = 4, nazivna brzina vrtnje n = 1491 o/min s n s n ,6% ns
26 Rotorski napon Dok rotor miruje (s=1) u njemu okretno polje inducira napon E r0. Nakon što se rotor počne vrtjeti, mijenja j se relativna brzina okretnog polja statora prema rotoru, a napon E r se mijenja prema izrazu: E r = E r0 s Pi Pri relativnoj lti jbrzini i 0, tj. zas=0, nemanapona urotoru, nema struje, sile ni momenta pa motor ne može raditi pri tom klizanju. Samo pri različitim brzinama vrtnje okretnog polja i rotora postoji inducirani napon, struje u rotoru i elektromagnetski moment. Zbog toga je naziv asinkroni motor. 26
27 Frekvencija rotorskih struja Inducirani napon i struja rotora imaju frekvenciju f r pn ( s n ) 60 s f s Ovu frekvenciju nazivamo frekvencija klizanja. Teoretski ona može imati i bilo koju vrijednost. f r f s 1 0 n s n 27
28 Elektromehanička pretvorba energije posredstvom okretnih magnetskih polja Za elektromehaničku pretvorbu energije posredstvom magnetskih polja neophodno je da se statorsko i rotorsko magnetsko polje vrte istom brzinom, odnosno da im relativna brzina bude jednaka nuli. Ukupna brzina vrtnje rotorskog polja u odnosu na jednu fiksnu točku statora je zbroj brzine okretnog polja rotora u odnosu na rotor n 0r i brzine rotora n u odnosu na jednu fiksnu točku statora n+n 0r = n s Kod sinkronog stroja narotoru je istosmjerna uzbudna struja ili su trajni magneti; nema okretnog polja rotorskih struja u odnosu na rotor koji se zbog toga mora vrtjeti sinkronom brzinom vrtnje statorskog polja. Kod asinkronog stroja pretvorba je uvijek moguća osim pri vrtnji rotora sinkronom brzinomstatorskogpoljakada jeklizanje jednakonuli. Asinkroni stroj je pri tome prirodno puno prihvatljiviji za primjenu od sinkronog jer su na raspolaganju velike mogućnosti promjena rotorske brzine vrtnje i frekvencije. 28
29 Odnosi brzina vrtnje u asinkronom stroju n s brzina vrtnje statorskog okretnog polja u odnosu na stator n brzina vrtnje rotora u odnosu na stator n 0r brzina vrtnje rotorskog okretnog polja u odnosu na rotor n + n 0r = n s 29
30 Osnovne jednadžbe asinkronog motora Naponska jednadžba statora uas Rs 0 0ias as d u 0 R 0 i bs s bs dt bs u 0 0 cs Rs ics cs Osnovni dvopolni prikaz asinkronog motora R otpor namota ulančeni č tok namota Naponska jednadžba rotora uar Rr 0 0iar ar d ubr 0 Rr 0 ibr br dt u 0 0 cr Rr icr cr 30
31 Osnovne jednadžbe asinkronog motora Ulančeni tokovi statora as Lasas L s Lasbs Lascs ias Lasar r Lasbr r Lascr r iar bs Lbsas Lbsbs L s Lbscs ibs Lbsar r Lbsbr r Lbscr r ibr cs Lcsas Lcsbs Lcscs L s ics Lcsar r Lcsbr r Lcscr r icr Ulančeni tokovi rotora ar Laras r Larbs r Larcs r ias Larar L r Larbr Larcr iar br Lbras r Lbrbs r Lbrcs r ibs Lbrar Lbrbr L r Lbrcr ibr L L L i L L L L i cr cras r crbs r crcs r cs crar crbr crcr r cr L asbs međuinduktivitet (as namot koji ulančuje tok, bs namot koji pobuđuje tok) L rasipni tok namota 31
32 Jednadžbe asinkronog motora u stacionarnom stanju Primjenom kompleksnih vektora šest naponskih jednadžbi statora i rotora reduciraju se na samo dvije jednadžbe. Ustacionarnomstanjubrzinavrtnjejekonstantnapasevektorskejednadžbe mogu zamijeniti fazorskima. U fazorskoj domeni naponske jednadžbe statora i rotora glase: U R j L I j L I I s s s s s s m s r U R j L I j L I I r r s r r s m s r ω električna lktič kutna brzina vrtnje rotora (ω = pω m ) ω m mehanička kutna brzine vrtnje rotora Rotorska jednadžba se množi s 1 s s s (s je klizanje). 3 Lm Lxsxs, xa, bili c 2 s 2 fs Nf s ns U r Ur Nf r nr mr Nrfnr I r Ir m N f s s ns m 2 s Nsfns R r R mr Nrfnr U r R 2 r L I L I I m N f j s r r j s m s r s s ns L s s r L r m N f r r nr r 32
33 Nadomjesna električna shema asinkronog stroja U R jx I jx I I s s s s m s r U r s R r jx r Ir jxm Is Ir s X m = L m ω s X σs = L σs ω s X' σr = L' σr ω s R s i X σs statorski otpor i rasipna reaktancija X m reaktancija magnetiziranja (predstavlja ulančeni magnetski tok stator rotor) R' r i X' σr rotorski otpor i rasipna reaktancija preračunati na statorsku stranu E s inducirani fazni napon statora E' r0 inducirani fazni napon rotora u mirovanju preračunat na statorsku stranu U' r /s rotorski napon na kliznimi kl kolutima u ovisnosti io klizanjupreračunat č na statorskustranu 33
34 Nadomjesna električna shema asinkronog stroja Slično transformatoru, asinkroni motor možemo prikazati električnom nadomjesnom shemom (modelom). Na slici je shema za kavezni motor. Da bi se uzeli u obzir gubici u željezu statora, u shemu se dodaje član R 0 koji predstavlja nadomjesni otpor zbog gubitaka u željezu. Referentni smjer struje I r se može odabrati proizvoljno. Kada je rotor kratko spojen, obično se uzima smjer struje rotora kao na slici. Struje, snage i momente možemo računati primjenom nadomjesne sheme za bilo koje stacionarno pogonsko stanje. 34
35 Inducirani napon u asinkronom stroju Asinkroni stroj u mirovanju (s = 1) možemo razmatrati i koristiti kao specijalnu izvedbu transformatora (zakretni transformator): E 0 N f f E N f f r r nr r s s ns s Zbog jednakosti frekvencija statora i rotora u mirovanju (f r = f s )vrijedi E N f N f N f N f E E E E N f N f N f N f r 0 r nr Er0 s ns r0 s ns s r nr s s s ns r nr r nr s ns E s napon faze statora E r0 napon faze rotora u mirovanju E' 0 napon faze rotora u mirovanju preračunat na statorsku stranu E r0 N r i N s brojevi zavoja po fazi statorskog i rotorskog namota f ns i f nr faktori namota statora i rotora Za kavezni rotor faktor namota je 1, a broj zavoja po fazi je1/2. 35
36 Rotorska struja Struju u rotoru određuju inducirani napon E r i impedancija rotora Z r U mirovanju je f r = f S s = 1 I r s Er se r0 Z R X s 2 r 2 r r() E r = E r0 X σr0 =2f rl σr =2f s L σr X r0 rasipna reaktancija rotora u mirovanju UvrtnjijeE r = se r0 X σr (s) = 2f s s L σr = s X σr0 Stoga je ser0 Er0 Ir () s Rr ( sx r0) Rr s X 2 r0 Za s =0,strujaI r (s)=0. 36
37 Rotorski strujni krug asinkronog stroja preračunat na statorsku stranu R r 1 s s 1 s Rr s Nf s E r0 Er0 Nf r ns nr IX I m N f X m N f IX N f r r nr s s ns s ns r r r r r r ms Nf s ns mr Nf r nr Nf r nr R r mr Nf r nr Rr m Nf Rr Nf I r Ir Ir s m N f s m N f s N f 2 2 s s ns s ns s s ns r r nr r nr R' r otpor rotora preračunat na statorsku stranu 1 s Rr s ekvivalent mehaničkog rada X' r rasipna reaktancija rotora preračunata na statorsku stranu X' r = L' r s 37
38 Rotorska struja u ovisnosti o klizanju I kr struja uz zakočeni rotor I nr nazivna struja 38
39 Energetska bilanca asinkronog stroja Prema nadomjesnoj shemi za stacionarno stanje: Iz mreže motor uzima P s = P 1 = m s U s I s cos s m s i m r broj faza statora i rotora s faznipomakstrujeinaponastatora Na radnom otporu statora se troši snaga P 2 sel = m s I s R s Uželjezustatora(naR 0 ) se troši snaga P sfe = m s E s2 / R 0 = m s I 0r2 R 0 Snaga okretnog mag. polja P okr = P s P sel P sfe P okr = m r I r2 R r /s = m r I r2 R r + m r I r2 R r (1 s)/s =m s I r2 R r /s = m s I r2 R r + m s I r2 R r (1 s)/s 39
40 Energetska bilanca asinkronog stroja Gubici u željezu rotora se mogu zanemariti zbog male frekvencije u rotoru f r <<. Stoga je P okr = P rel + P meh snaga okretnog polja P I' rel = m r I 2 r R r = m s 2 r R' r gubici u namotu rotora P meh = m r I 2 r R r (1 s)/s = m s I' 2 r R' r (1 s)/s razvijena mehanička snaga Odnos električnih lktič ih gubitaka u rotoru i razvijene mehaničke snage je 2 2 Prel mr Ir Rr ms Ir Rr s = = P 2 1 s 2 1 s meh mi 1 s r r Rr mi s r Rr s s P rel = sp okr P meh = (1 s)p okr Električnigubici u rotoru su izravnoproporcionalni klizanju, stoga klizanjemorabiti što manje za prihvatljivu korisnost pretvorbe energije. Klizanje je obično (0,5 5 %). Na primjer mali motori < 20 kw s =3 5% srednji motori < 500 kw s = 1 1,5% veliki motori > 1000 kw s = 0,5 1% 40
41 Tok snage i gubici asinkronog motora (bilanca snage) P 2 jemehanička snaga na osovini motora, korisnost motora 2 P1 P 2 41
42 Radna, jalova i prividna snaga Za stvaranje okretnog mag. polja asinkroni stroj uzima iz mreže jalovu (reaktivnu) snagu Q s = m s U s I s sin s Prividna snaga motora uzeta iz mreže je S = P s +jq s = m s (U s I s cos s +ju s I s sin s ) Motor je uvijek definiran radnom snagom na osovini. To je njegova nazivna snaga P 2. Ako stroj radi u generatorskom režimu rada (s<0), itadamuje potrebna jalova snaga iz mreže ili kondenzatorske baterije. Primjer nazivnih podataka motora: Proizvođač: đ č XXYY Asinkroni trofazni motor, snaga 1000 kw, napon 6000 V, 50 Hz, nazivna struja 115 A, cos = 0,88, brzina vrtnje 1485 o/min, godina proizvodnje
43 Momentna karakteristika asinkronog motora U nadomjesnoj shemi promatrajmo samo rotorski krug (zanemarena impedancija statora) 2 2 P2 Ptr, v Pmeh (1 s ) Pokr Pokr mir rr r ms Ir Rr M (1 s) s s sm m m sm sm sm sm 2 r r0 Rr 2 r 2 X r0 2 m 30 rer0 R me r 1 2 R s r 2 R s X r0 ns s s 2 30mE s r0 Rr 1,Nm 2 R s r 2 n s X r s m mehanička kutna brzina vrtnje rotora sm mehanička kutna brzina vrtnje okretnog polja Zanemarili smo u nadomjesnoj shemi statorsku impedanciju Z s = R s +jx σs. Razvijeni moment je ovisan samo o klizanju uz ostale parametre sheme pretpostavljene nepromjenljivima. Ako se uzme potpuna nadomjesna shema, dobiju se točniji izrazi za moment, kako slijedi: 43
44 Točniji izraz za elektromagnetski moment Struja rotora preračunata na statorsku stranu Us I r 2 R r R 1 X 1X s X s 1 1 s s r X m faktor rasipanja Električna snaga pretvorena u mehanički rad je P meh, a razvijeni elektromagnetski moment 2 2 P meh ms Ir Rr ms Us Rr' M 2 m sm s sm R 2 s r R s 1 X s 1Xr s 2 pm s U s R r 2 s R 2 s r R s 1 X s 1Xr s s električna kutna brzina vrtnje okretnog polja 2 44
45 Momentna karakteristika Grafički, momentna karakteristika najčešće se crta samo za motorski rad i označava prema slici. Na momentnoj karakteristici ključne su 3 točke: s = 1, n = 0 potezni moment ili moment kratkog spoja (pokretanja) s = s n n,, n = n n nazivni moment s = s max, n = n max maksimalni moment 45
46 Momentna karakteristika pri svim brzinama vrtnje Bitno je istaknuti da je moment pri svakoj brzini ovisan o kvadratu narinutog napona: M = f (U 2 ) Općenito momentna karakteristika izgleda prema slici. Na njoj su karakteristična područja: od s = 1 do s = 0 motorsko područje rada, energija se uzima iz mreže, za s 0 generatorski rad, energija se vraća u mrežu za s 1 protustrujno kočenje, energija se uzima iz mreže i kinetička energija radnih mehanizama koči rotor i predaje mu energiju 46
47 Maksimalni ili prekretni moment Za primjene je važan maksimalni ili prekretni moment motora. Derivacijomizrazazamomentnaslajdu52iizjednačavanjem s nulom dobije se klizanje s max kodkojeg motor razvijanajveći j moment (maksimalni iiliili prekretni moment). dm ds 0 Iz slijedi s max 2 R X 1 X 1R r s s r 2 i uvrštenjem u izraz za moment dobiva se M max mu 2 1 R R X 1X 2 sm s s s r s 2 s 2 Predznak (+) je za motorski rad, a ( ) za generatorski rad. 47
48 Klossove formule U praksi koristimo analitičke izraze za momentnu karakteristiku poznate kao Klossove formule. Dobijemo ih ako se izraz za moment podijeli s izrazom za maksimalni moment u obliku M M max s s max 2 smax s 2R s R X X 2 s s 1 r 2 Zamanje točnač računanjač može seprimijeniti ij itipojednostavljena jd Klossova formula dobivena zanemarenjem statorske impedancije u obliku M M max s s max 2 s s max 48
49 Momentna karakteristika motora i tereta Primjer: Mehanička karakteristika asinkronog motora i centrifugalnog ventilatora, pogonska radna točka centrifuga galni ventilator M n nazivni moment M k moment kratkog spoja M max maksimalni moment 49
50 Moment i struja u zaletu asinkronog motora (prikaz dobiven iz modela za stacionarno stanje) Kod asinkronog motora problem su velike struje pri pokretanju motora. I M I n M n ,2 0,4 0,6 0,8 1 n n s 0 50


51 Moment, struja i brzina vrtnje u zaletu asinkronog motora (prikaz dobiven iz modela za stvarno dinamičko stanje) romagnetski mom ment, Nm Elekt Brzina vrtnje, o/min A Struja statora, Vrijeme, ms Brz zina vrtnje, o/m min Vij Vrijeme, ms 51
52 Magnetsko polje tijekom zaleta asinkronog motora 52
53 Različiti oblici momentne karakteristike trofaznih asinkronih motora Oblik momentne karakteristike ovisi o odnosima induktivnih i radnih otpora. Konstrukcijom rotorskog utora se utječe na oblik momentne karakteristike. 53
54 Kružni dijagram asinkronog stroja Crtanjem kružnog dijagrama na osnovi nadomjesne sheme motora se grafički dobivaju podaci o radnim karakteristikama stroja. Primjena kružnih dijagrama nije aktualna nakon što su se pojavile mogućnosti brzog analitičkog računanja svih karakteristika motora prema nadomjesnoj shemi pomoćuračunala. Detalji o kružnim dijagramima u knjizi R. Wolf: Osnove električnih strojeva, str
55 Pogonska stanja asinkronog stroja Prazni hod motora na osovini nema opterećenja, klizanje s<<, R r /s >>, struja praznog hoda I 0 mala (10 25 % nazivne) Kratki spoj motora rotor zakočen (miruje), klizanje s =1,Z k prema shemi, struja kratkogk spoja I k vrlo velika (5 8 puta većaodnazivne) Opterećenje na osovini klizanje malo (1 5 %), struja iz mreže ovisna o opterećenju ć 55
56 Nadomjesna shema i fazorski dijagram asinkronog stroja u praznom hodu R s I s0 ji s0 X s jx s R s U S I s0 R 0 E s I s0 jx m E s U S I r I I s 0 0 I 0r I 0 I s0 I 0r I Za računanje se može zanemariti rotorski dio nadomjesne sheme zbog I r << 56
57 Nadomjesna shema i fazorski dijagram asinkronog stroja u kratkom spoju jx s R jx S r R r I k U S U S U kratkom spoju možemo zanemariti poprečnu granu nadomjesne sheme i struju računati prema izrazu I k U s 2 2 s r s r ( R R ) ( X X ) k I k 57
58 Nadomjesna shema i fazorski dijagram asinkronog stroja u stacionarnom stanju U S ji s X s jxσs R s jx σs R r s R S I S ji r X r U S I S R 0 E s I 0 jx μ I r E s R r I r s I r I S I 0r I I 0 I 0 I I 0r 58
59 Radne karakteristike asinkronog motora s, % 10 cos I s I sn 1,0 I s I sn cos 5 0,5 s ,5 1,0 P P n 59
60 Promjena smjera vrtnje asinkronog motora (reverziranje) K1 K2 L1 L2 L3 Smjer vrtnje okretnog polja određen je redoslijedom faza. Želimo li ga promijeniti, dovoljno je međusobno zamijeniti priključke 2 od 3 fazna namota trofaznog motora. To se obično radi primjenom kontaktora (sklopnika) i tipkala. U V W U, V i W oznake stezaljki motora L1, L2 i L3 oznake faza mreže K1 i K2 kontaktori (sklopnici) M ~ 60
61 Momentna karakteristika asinkronog motora u procesu reverziranja (promjene smjera vrtnje) 1 Motor kreće iz mirovanja (s=1) 2 Motor se zalijeće do približno sinkrone brzine vrtnje (s<<) 3 Uz beznaponsku pauzu vrši se zamjena redoslijeda faza, motor prelazi u protustrujno kočenje (s=2) 4 Motor koči do brzine 0 (s=1) 5 Motor se zalijeće do približno sinkrone brzine vrtnje u suprotnom smjeru (s<<) 61
62 Moment, struja i brzina vrtnje tijekom reverziranja asinkronog motora (prikaz dobiven iz modela za stvarno dinamičko stanje) ment, Nm romagnetski mo Elekt Brzina vrtnje, o/min A Struja statora, Vrijeme, ms Brz zina vrtnje, o/ /min Vrijeme, ms 62
63 Magnetsko polje tijekom zaleta asinkronog motora 63
64 Problemi i tehnike pokretanja asinkronih motora 1. Problemi kod pokretanja asinkronih motora Velike struje pokretanja, obično 5 8 puta veće od nazivnih, Preveliki ili nedovoljno veliki momenti pokretanja ( nedovoljno veliki momenti ubrzavanja), Predugo trajanje zaleta motora i pogona 2. Tehnike pokretanja Najčešće primjenjivane j etehnike esu: Pokretanje direktnim priključkom na mrežu, Pokretanje zvijezda trokut preklopkom, Pokretanjepreko autotransformatora, Pokretanje soft start uređajem, Pokretanje pomoću elektroničkog energetskog pretvarača, Pokretanjepreko hidrauličnih zaletnih spojnica. Sve se tehnike svode na to da se izvrši uspješan zalet motora i pogona uz što manje struje zaleta i što kraće trajanje zaleta. Utjecaj na mrežu mora biti u prihvatljivim granicama. 64
65 Pokretanje kaveznog asinkronog motora direktnim priključkom na mrežu M, Nm Moment motora i moment tereta I, A Statorska struja Moment tereta n, o/min n, o/min Zbog velikih struja pokretanja koje prave probleme u električnoj mreži (padovi napona i preopterećenja sklopnih aparata) koriste se različite tehnike pokretanja. Direktni start Pokretanje zvijezda trokut Pokretanje autotransformatorom Pokretanje soft start uređajem Shema Nastavi prez. 65



66 Spojna shema za pokretanje kaveznog asinkronog motora direktnim priključkom na mrežu osigurači sklopnik bimetal Povratak 66
67 Pokretanje kaveznog asinkronog motora preklopkom zvijezda trokut M, Nm I, A Moment Δ Struja Δ Moment Y Struja Y n,, o/min n,, o/min 2 U NAMOTU PREMA MREŽI M Y U SY 1 I SY 1 ISY 1 M U S 3 I 3 I 3 Direktni start Pokretanje zvijezda trokut Pokretanje autotransformatorom S I Shema Pokretanje soft start uređajem Nastavi prez. 67
68 Shema spoja za priključak kaveznog asinkronog motora na mrežu preklopkom zvijezda trokut L1 U1 W2 L2 L3 U2 V1 W1 V2 Povratak 68
69 Pokretanje kaveznog asinkronog motora autotransformatorom M, Nm I, A n, o/min n, o/min Direktni i start Pokretanje zvijezda trokut Pokretanje autotransformatorom Pokretanje soft start uređajem Shema Nastavi prez. 69
70 Pokretanje kaveznog asinkronog motora autotransformatorom Potrebna su tri prekidača i autotransformator. Struja pokretanja se prilagodi mogućnostima mreže. Pokretanje: zatvoreni prekidači(sklopke) Ai B Normalni pogon: zatvoreni prekidači A i C. L1 L2 L3 A C Povratak B AM 70
71 Soft start ili lagano pokretanje M, Nm 800 I, A I n n, o/min n, o/min U/U n 1 Pokretanje soft start uređajem 0,5 U U st t Shema Direktni start Pokretanje zvijezda trokut Pokretanje autotransformatorom Nastavi prez. 71





72 Pokretanje kaveznog asinkronog motora preko soft start uređaja Soft starter je elektronički uređaj kojim se može regulirati napon statora motora da se smanji struja pokretanja na neki dozvoljeni iznos iznos. Povratak Priključak na mrežu sa soft start uređajem Soft start uređaj s bajpas sklopnikom Valni oblici napona i struje statora 72
73 Pokretanje klizno kolutnog asinkronog motora dodavanjem otpora u rotorski krug M, Nm I, A n, o/min R d = 0 R d = Rad1 R d = Rad1+Rad2 R d = Rad1+Rad2+Rad n, o/min Nastavi prezentaciju 73
74 Pokretanje klizno kolutnog asinkronog motora dodavanjem otpora u rotorski krug M, Nm n, n, o/min I, A R d = 0 R d = Rad1 R d = Rad1+Rad2 R d = Rad1+Rad2+Rad n, o/min Nastavi prezentaciju 74
75 Pokretanje klizno kolutnog asinkronog motora dodavanjem otpora u rotorski krug M, Nm n, o/min I, A R d = 0 R d = Rad1 R d = Rad1+Rad2 R d = Rad1+Rad2+Rad n, o/min Nastavi prezentaciju 75
76 Pokretanje klizno kolutnog asinkronog motora dodavanjem otpora u rotorski krug M, Nm n, o/min I [A] R d = 0 R d = Rad1 R d = Rad1+Rad2 R d = Rad1+Rad2+Rad n, o/min Nastavi prezentaciju 76
77 Elektromotorni pogon sustav za pretvorbe električne u mehaničku energiju 77
78 Regulacija brzine vrtnje asinkronog motora Brzina vrtnje motora je određena izrazom 60 f s n ns(1 s) (1 s ) p i ona se može regulirati (namještati) promjenom frekvencije f s,brojaparipolova p i promjenom klizanja s. Mijenjanje brzine promjenom broja pari polova je moguće samo u grubim iznosima. Npr. za f s =50Hzvrijedi p = 1, sinkrona brzina je 3000 o/min p =2, sinkrona abrzinaje 1500 o/min p = 3, sinkrona brzina je 1000 o/min Često se koristi u praksi i to najčešće u stroju za pranje rublja. Motor sadrži dva namota, npr. jedan ima 2p =2,adrugi 2p =12ili 14. Vrlo jejednostavno i, za primjenuudomaćinstvu, prihvatljivo tehničko rješenje. 78
79 Regulacije u elektromotornim pogonima Općenito može biti potrebno da se u nekom elektromotornom pogonu regulira: brzina vrtnje radnih mehanizama, moment, položaj j(pozicija). Najčešće se regulira brzina vrtnje. Da li će se regulirati brzina zbog ušteda energije, ovisi o tehničkoekonomskim uvjetima (cijena energije, gj vremenski rok za povrat investicije). 79
80 Što znači regulirati brzinu vrtnje motora? Prema slici, radna točka EMP pogona u stacionarnom stanju je određena sjecištem karakteristike momenta motora i karakteristike momenta opterećenja M m = M t. Regulirati brzinu vrtnje znači mijenjati j momentnu karakteristiku M m u M' m tako da njeno sjecište s karakteristikom tereta bude pri željenoj brzini vrtnje n'. Prema slici momentnu karakteristiku M m smo promijenili tako da smo promijenili sinkronu brzinu vrtnje motora n s u n' s mijenjajući frekvenciju struja koje teku kroz namote statora. n s 60 fs 60 fs n s p p 80
81 Regulacija brzine vrtnje preklapanjem polova Preklapanje polova se može ostvariti sa dva ili više galvanski odvojenih namota u motoru ili jednim namotom izvedenim iz dva jednaka dijela koji se prespajaju prema Dahlanderovom principu. Prespajanjem prema Dahlanderu može se dobiti omjer brzina 1:2. M 2p = 2 2p = 4 M t 0 n 2 n s2 n s1 n 1 n 81
82 Regulacija brzine vrtnje promjenom narinutog napona Promjenom napona uz fiksnu frekvenciju momentna karakteristika motora se mijenja prema M m = f(u 2 ). Svakom naponu odgovara druga karakteristika, a budući da je karakteristika momenta tereta jedna i zadana vrstom tereta, radna točka će biti određena karakteristikom motora. Suvremena tehnologija (poluvodička energetska elektronika) omogućava regulaciju napona uvrloširokim granicama. Energetski gledano, ovakva regulacija nije optimalna jer su gubici energije neizbježni. 82
83 Regulacija brzine promjenom napona i frekvencije Brzina vrtnje je direktno proporcionalna frekvenciji n 60 f s (1 s ), p ali se u motoru zbog promjene frekvencije događaju i promjene magnetskog toka (indukcija) što utječe na promjene razvijenog momenta. U E 444 4,44 Nf BS s s s Promjenimo li frekvenciju f s ne mijenjajući napon, doći će do promjene indukcije B odnosno magnetskog toka Φ. Povećanje B nije dozvoljeno zbog zasićenja magnetskog kruga, a smanjenjem Φ (pri povećanju f s ) smanjuje se moment motora što opet nije dozvoljeno. Zbogtoga se regulira po zakonu U f s s Es konst. f s 83
84 Principna shema spoja asinkronog motora i elektroničkog energetskog pretvarača na izmjeničnu mrežu 84
85 Tipična struktura pretvarača za asinkroni motor Diodni Ispravljač Istosmjerni međukrug Izmjenjivač Mrežni priključak L1 L2 L3 U G+ U DC R C DC T1 T3 T5 Priključak motora U V Motor W T4 T6 T2 U G- Mjerenje struje 85
86 Skalarna regulacija Istovremeno treba mijenjati napon i frekvenciju. Pri takvoj promjeni, koja se zove skalarna regulacija, momentne karakteristike izgledaju prema slici. 86
87 Promjena napona i frekvencije pri skalarnoj regulaciji asinkronog motora U S U n konstantan tok slabljenje polja 0 f n Frekvencija f max f 87
88 Momentne karakteristike pri skalarnoj regulaciji asinkronog motora Frekvencija f 1 jeosnovnafrekvencijazakojujegrađen motor. Smanjivanje frekvencije f 1 daje karakteristiku U 21 /f 21 =konst., tj. smanjeni su napon i frekvencija u odnosu na U 1 /f 1 =konst. Povećanje frekvencije f 1 na f 2 nije moguće pozakonuu/f=konst. jer je napon za određeni motor određen gornjom granicom U=U n. Zbog povećanja frekvencije f 1 na f 2, a nepromijenjenog napona, smanjen je magnetski tok u motoru i razvijeni moment. To je tzv. područje slabljenja magnetskog toka. 88
89 Ovisnost momenta motora o frekvenciji i načinu hlađenja pri skalarnoj regulaciji 89
90 Dozvoljene veličine struje pri kratkotrajnom i trajnom pogonu reguliranog motora 90
91 Regulirani ili neregulirani elektromotorni pogon? Osnovna zadaća ć reguliranog EMP a je upravljanje j tokom energije koja ide iz mreže (izvora) u proces i obratno. Regulirati se može brzina, moment ili pozicija. Zašto odabrati regulirani pogon ili zamijeniti postojeći neregulirani reguliranim? Zbog zahtjeva tehnološkog procesa (automatizacija,..), Zbog zaštite mreže, motora i radnih mehanizama, Zbog smanjenja j potrošnje (ušteda) električne lktič energije. 91
92 Regulacija pogona zbog ušteda energije Najveće uštede električne energije mogu se postići reguliranim pogonom centrifugalnih pumpi, p, ventilatora i kompresora koji su podopterećeni u normalnom pogonskom stanju i koji su godišnje relativno dugo vremena u pogonu. U tehnički razvijenom svijetu prevladava tendencija primjene novih reguliranih pogona i zamjena postojećih nereguliranih reguliranima. 92
93 Regulacija protoka nekog medija U nereguliranim elektromotornim pogonima protok medija Q (m 3 /s) se može regulirati nekim od načina prigušenja prema sl. 1, a u reguliranim prema sl. 2 tako da se brzinom vrtnje motora regulira brzina vrtnje pumpe, o kojoj ovisi veličina protoka i korisnosti pumpe. n konst. Sl.1. EMP bez mogućnosti regulacije brzine vrtnje elektromotora, protok se regulira prigušenjem na ulazu u spremnik medija 93
94 Regulacija protoka medija promjenom brzine vrtnje elektromotora i pumpe Mreža, U 1, f 1 U 1, f 1 ~ U 2, f 2 pretvarač y ~ Regulator w x M n regulirana izlaz El. motor pumpa spremnik ulaz Sl. 2. Regulirani elektromotorni pogon,,protok se regulira brzinom vrtnje motora odnosno pumpe (zbog ušteda energije) 94
95 Regulacija (namještanje) brzine vrtnje asinkronog motora promjenom napona i frekvencije M, Nm Hz U/f = const. U = var, f = const 60 f = 50 Hz 40 f = 30 Hz 20 f = 15 Hz n, o/min Nastavi prezentaciju M = 40 Nm n = 1383 o/min 95
96 Regulacija (namještanje) brzine vrtnje asinkronog motora promjenom napona i frekvencije M, Nm Hz 50 Hz U/f = const. U = var, f = const 60 f = 50 Hz 40 f = 30 Hz 20 f = 15 Hz n, o/min Nastavi prezentaciju M = 28,0 Nm n = 820 o/min 96
97 Regulacija (namještanje) brzine vrtnje asinkronog motora promjenom napona i frekvencije M, Nm Hz 50 Hz U/f = const. U = var, f = const 60 f = 50 Hz Hz f = 30 Hz f = 15 Hz n, o/min Nastavi prezentaciju M = 21 Nm n = 395 min 1 97
98 Regulacija (namještanje) brzine vrtnje asinkronog motora promjenom napona i frekvencije M, Nm 160 U/f = const. U = var, f = const 120 U = 400 V 80 U = 300 V 40 U = 200 V n, o/min Nastavi prezentaciju M = 80 Nm n = 923 o/min 98
99 Regulacija (namještanje) brzine vrtnje asinkronog motora promjenom napona i frekvencije M, Nm 160 U/f = const. U = var, f = const 120 U = 400 V 80 U = 300 V 40 U = 200 V n, o/min Nastavi prezentaciju M = 50 Nm n = 910 o/min 99
100 Regulacija (namještanje) brzine vrtnje asinkronog motora promjenom napona i frekvencije M,Nm 160 U/f = const. U = var, f = const 120 U = 400 V 80 U = 300 V 40 U = 200 V n,o/min Nastavi prezentaciju M = 38 Nm n = 780 o/min 100
101 JEDNOFAZNI ASINKRONI MOTOR 101
102 Jednofazni asinkroni motor To je obično kavezni motor koji ima samo jedan namot na statoru te se priključuje na jednofazni izmjenični namot. U I Dok rotor miruje, njegovo je klizanje prema direktnom i inverznom protjecanju j stvorenima strujom namota statora jednako s d = s i =1. Okretna protjecanja Θ d i Θ i imaju jednake amplitude i brzine vrtnje, ali se vrte u suprotnom smjeru. 102
103 Momentna karakteristika jednofaznog asinkronog motora Strujeimomentisujednakizadirektniiinverznisistemdokrotormiruje(s=1), iz čega slijedi da je ukupni moment jednak nuli. Motor ne može krenuti iz mirovanja! M M d M d + M i n si M i 0 n sd n M d moment direktnog protjecanja M i moment inverznog protjecanja M d + M i ukupni moment jednofaznog motora Čim se motor pokrene iz mirovanja prevladava jedno okretno polje i motor razvija moment kojim može savladati teret i nastaviti vrtnju. 103
104 Jednofazni motor s pomoćnom fazom za zalet Problem poteznog momenta jednofaznog motora rješava se ugradnjom pomoćne faze za zalet koja je prostorno pomaknuta prema tzv. glavnoj fazi za neki kut, a fazni pomaci struja kroz fazne namote ostvaruju se dodavanjem kondenzatora, otpornika ili prigušnice (induktiviteta) u pomoćnu fazu. Tako se dobije jednofazni motor s pomoćnom fazom za zalet simbolički prikazan na slici. L 1 N I p I g C g I m p rotor Važno je postići što veći fazni pomak struja glavne I g i pomoćne I p faze. Fazorski dijagram kondenzatorskog motora 104
105 Reverziranje (promjena smjera vrtnje) motora s pomoćnom fazom Struja u namotu svake faze stvara svoje pulsirajuće protjecanje koje možemo prikazati s dva okretna protjecanja Θ d i Θ i. Kako znamo iz teorije okretnog polja, os okretnog protjecanja se nalazi u osi namota određene faze u trenutku kada struja tog namota prolazi kroz maksimum, a iznos tog protjecanja je Θ d = Θ i = Θ 1 /2. Struja u fazi u kojoj je kondenzator je prošla svoj maksimum prije faze u kojoj nije kondenzator za kut = gl + p. 105
106 Smjer vrtnje i reverziranje motora s pomoćnom fazom Direktno protjecanje je veće od inverznog pa se rotor vrti u smjeru toga rezultirajućeg protjecanja Θ d. Rezultantno okretno magnetsko polje vrti se uvijek u smjeru od faze u kojoj struja prethodi naponu prema fazi u kojoj struja zaostaje. Iz toga se može zaključiti i na koji se način može reverzirati kondenzatorski motor. ota glavne faze d Os nam gd f gd gi I g g i pd I p p gi Os namota pomoćne faze pi 106
107 Spojna shema za reverziranje (promjenu smjera vrtnje) kondenzatorskog motora zamjenom priključaka namota pomoćne faze (l lijevo, d desno) L 1 N I g l d l d glav na faza I p C rotor pomoćna faza 107
ASINKRONI STROJEVI I POGONI
 FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ELEKTROMEHANIČKE I ELEKTRIČNE PRETVORBE ENERGIJE ASINKRONI STROJEVI I POGONI Doc.dr.sc. Damir Žarko ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU Ak. god. 2009/2010
FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ELEKTROMEHANIČKE I ELEKTRIČNE PRETVORBE ENERGIJE ASINKRONI STROJEVI I POGONI Doc.dr.sc. Damir Žarko ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU Ak. god. 2009/2010
ELEKTRIČNI AKTUATORI Ak. god. 2011/2012.
 FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA www.fer.hr/predmet/eleakt_a ELEKTRIČNI AKTUATORI Ak. god. 2011/2012. Modul: Automatika Predavanja: Prof. dr. sc. Ivan Gašparac Auditorne vježbe: Laboratorij: Goran
FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA www.fer.hr/predmet/eleakt_a ELEKTRIČNI AKTUATORI Ak. god. 2011/2012. Modul: Automatika Predavanja: Prof. dr. sc. Ivan Gašparac Auditorne vježbe: Laboratorij: Goran
ELEKTROMOTORNI POGONI - AUDITORNE VJEŽBE
 veučilište u ijeci TEHNIČKI FAKULTET veučilišni preddiplomki tudij elektrotehnike ELEKTOOTONI OGONI - AUDITONE VJEŽBE Ainkroni motor Ainkroni motor inkrona obodna brzina inkrona brzina okretanja Odno n
veučilište u ijeci TEHNIČKI FAKULTET veučilišni preddiplomki tudij elektrotehnike ELEKTOOTONI OGONI - AUDITONE VJEŽBE Ainkroni motor Ainkroni motor inkrona obodna brzina inkrona brzina okretanja Odno n
ELEKTROMOTORNI POGONI S IZMJENIČNIM MOTORIMA
 FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ELEKTROMOTORNI POGONI ELEKTROMOTORNI POGONI S IZMJENIČNIM MOTORIMA Modul: Elektroenergetika Predavanja: Prof. dr. sc. Drago Ban Prof.dr.sc. Ivan Gašparac ZAVOD ZA
FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ELEKTROMOTORNI POGONI ELEKTROMOTORNI POGONI S IZMJENIČNIM MOTORIMA Modul: Elektroenergetika Predavanja: Prof. dr. sc. Drago Ban Prof.dr.sc. Ivan Gašparac ZAVOD ZA
Otpornost R u kolu naizmjenične struje
 Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
ELEKTROMOTORNI POGONI Laboratorijske vježbe
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU ELEKTROMOTORNI POGONI Laboratorijske vježbe Vježba 1 ZALET I REVERZIRANJE TROFAZNOG ASINKRONOG MOTORA
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU ELEKTROMOTORNI POGONI Laboratorijske vježbe Vježba 1 ZALET I REVERZIRANJE TROFAZNOG ASINKRONOG MOTORA
ELEKTROMOTORNI POGONI Laboratorijske vježbe
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU ELEKTROMOTORNI POGONI Laboratorijske vježbe Vježba 1 ZALET I REVERZIRANJE TROFAZNOG ASINKRONOG MOTORA
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU ELEKTROMOTORNI POGONI Laboratorijske vježbe Vježba 1 ZALET I REVERZIRANJE TROFAZNOG ASINKRONOG MOTORA
JEDNOFAZNI ASINKRONI MOTOR
 JEDNOFAZNI ASINKRONI MOTOR Jednofazni asinkroni motor je konstrukcijski i fizikalno vrlo sličan kaveznom asinkronom trofaznom motoru i premda je veći, skuplji i lošijih karakteristika od trofaznog iste
JEDNOFAZNI ASINKRONI MOTOR Jednofazni asinkroni motor je konstrukcijski i fizikalno vrlo sličan kaveznom asinkronom trofaznom motoru i premda je veći, skuplji i lošijih karakteristika od trofaznog iste
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
GUBICI ENERGIJE U DINAMIČKIM STANJIMA ASINKRONOG STROJA
 GUBICI ENERGIJE U DINAMIČKIM STANJIMA ASINKRONOG STROJA Dinamička tanja: ZALET REVERZIRANJE PROTUSTRUJNO KOČENJE Pretpotavka: Trenutno u završene električne prijelazne pojave; Jednadžba gibanja: d ω M
GUBICI ENERGIJE U DINAMIČKIM STANJIMA ASINKRONOG STROJA Dinamička tanja: ZALET REVERZIRANJE PROTUSTRUJNO KOČENJE Pretpotavka: Trenutno u završene električne prijelazne pojave; Jednadžba gibanja: d ω M
PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE)
") (Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
(Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
ELEKTRONIKA ZABILJEŠKE S PREDAVANJA. literaturi, ovo su samo bitne natuknice
 BRODSKA ELEKTROTEHNIKA I ELEKTRONIKA ZABILJEŠKE S PREDAVANJA Napomena: kompletno gradivo je u literaturi, ovo su samo bitne natuknice TROFAZNI SUSTAV Potreba za izmjeničnim strujama proistječe iz distribucije
BRODSKA ELEKTROTEHNIKA I ELEKTRONIKA ZABILJEŠKE S PREDAVANJA Napomena: kompletno gradivo je u literaturi, ovo su samo bitne natuknice TROFAZNI SUSTAV Potreba za izmjeničnim strujama proistječe iz distribucije
INDUCIRANJE TROFAZNOG NAPONA
 SINKRONI STROJEVI generatori od najmanjih do najvećih snaga motori za snage reda MW i više (dobar η, vrtnja definirana f mreže i brojem pari polova) generatori i motori - jednake izvedbe - razlika u smjeru
SINKRONI STROJEVI generatori od najmanjih do najvećih snaga motori za snage reda MW i više (dobar η, vrtnja definirana f mreže i brojem pari polova) generatori i motori - jednake izvedbe - razlika u smjeru
Primjene motora novih tehnologija
 Program stručnog usavršavanja ovlaštenih inženjera elektrotehnike ELEKTROTEHNIKA - XVII tečaj Nove tehnologije električnih postrojenja Primjene motora novih tehnologija mr sc Milivoj Puzak dipl. ing. viši
Program stručnog usavršavanja ovlaštenih inženjera elektrotehnike ELEKTROTEHNIKA - XVII tečaj Nove tehnologije električnih postrojenja Primjene motora novih tehnologija mr sc Milivoj Puzak dipl. ing. viši
- pravac n je zadan s točkom T(2,0) i koeficijentom smjera k=2. (30 bodova)
 i koeficijentom smjera k=2. (30 bodova)") MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
Snage u kolima naizmjenične struje
 Snage u kolima naizmjenične struje U naizmjeničnim kolima struje i naponi su vremenski promjenljive veličine pa će i snaga koja se isporučuje potrošaču biti vremenski promjenljiva Ta snaga naziva se trenutna
Snage u kolima naizmjenične struje U naizmjeničnim kolima struje i naponi su vremenski promjenljive veličine pa će i snaga koja se isporučuje potrošaču biti vremenski promjenljiva Ta snaga naziva se trenutna
BIPOLARNI TRANZISTOR Auditorne vježbe
 BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
4 Asinhroni strojevi Uvod Konstrukcijska izvedba Princip rada Režimi rada Modeli za analizu rada asinhronog
 Sadržaj 4 Asinhroni strojevi 1 4.1 Uvod................................. 1 4.2 Konstrukcijska izvedba....................... 2 4.3 Princip rada............................. 5 4.4 Režimi rada.............................
Sadržaj 4 Asinhroni strojevi 1 4.1 Uvod................................. 1 4.2 Konstrukcijska izvedba....................... 2 4.3 Princip rada............................. 5 4.4 Režimi rada.............................
Iz zadatka se uočava da je doslo do tropolnog kratkog spoja na sabirnicama B, pa je zamjenska šema,
 . Na slici je jednopolno prikazan trofazni EES sa svim potrebnim parametrima. U režimu rada neposredno prije nastanka KS kroz prekidač protiče struja (168-j140)A u naznačenom smjeru. Fazni stav struje
. Na slici je jednopolno prikazan trofazni EES sa svim potrebnim parametrima. U režimu rada neposredno prije nastanka KS kroz prekidač protiče struja (168-j140)A u naznačenom smjeru. Fazni stav struje
konst. Električni otpor
 Sveučilište J. J. Strossmayera u sijeku Elektrotehnički fakultet sijek Stručni studij Električni otpor hmov zakon Pri protjecanju struje kroz vodič pojavljuje se otpor. Georg Simon hm je ustanovio ovisnost
Sveučilište J. J. Strossmayera u sijeku Elektrotehnički fakultet sijek Stručni studij Električni otpor hmov zakon Pri protjecanju struje kroz vodič pojavljuje se otpor. Georg Simon hm je ustanovio ovisnost
Novi Sad god Broj 1 / 06 Veljko Milković Bulevar cara Lazara 56 Novi Sad. Izveštaj o merenju
 Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
ASINKRONI RAD SINKRONOG GENERATORA
 ASINKRONI RAD SINKRONOG GENERATORA 1 Asinkroni rad sinkronih generatora Nepravilan rad u kojemu brzina vrtnje nije sinkrona. Dozvoljava se kratkotrajno ili se trenutno isključuje. U asinkroni rad spada:
ASINKRONI RAD SINKRONOG GENERATORA 1 Asinkroni rad sinkronih generatora Nepravilan rad u kojemu brzina vrtnje nije sinkrona. Dozvoljava se kratkotrajno ili se trenutno isključuje. U asinkroni rad spada:
UZDUŽNA DINAMIKA VOZILA
 UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
Fazne i linijske veličine Trokut i zvijezda spoj Snaga trofaznog sustava
 7 TROFAZNI SUSTA Fazne i linijske veličine Trokut i zvijezda soj Snaga troaznog sustava Fourierova analiza 7.1. Troazni sustav Elektrorivredne tvrtke koriste troazne krugove za generiranje, rijenos i razdiobu
7 TROFAZNI SUSTA Fazne i linijske veličine Trokut i zvijezda soj Snaga troaznog sustava Fourierova analiza 7.1. Troazni sustav Elektrorivredne tvrtke koriste troazne krugove za generiranje, rijenos i razdiobu
Ovisnost ustaljenih stanja uzlaznog pretvarača 16V/0,16A o sklopnoj frekvenciji
 Ovisnost ustaljenih stanja uzlaznog pretvarača 16V/0,16A o sklopnoj frekvenciji Električna shema temeljnog spoja Električna shema fizički realiziranog uzlaznog pretvarača +E L E p V 2 P 2 3 4 6 2 1 1 10
Ovisnost ustaljenih stanja uzlaznog pretvarača 16V/0,16A o sklopnoj frekvenciji Električna shema temeljnog spoja Električna shema fizički realiziranog uzlaznog pretvarača +E L E p V 2 P 2 3 4 6 2 1 1 10
13.1 Načelni model električnog stroja
 13 ELEKTRIČNI STROJEVI Model električnog stroja Sinkroni strojevi Asinkroni strojevi Strojevi istosmjerne struje Posebne vrste motora 13.1 Načelni model električnog stroja Električni strojevi pretvaraju
13 ELEKTRIČNI STROJEVI Model električnog stroja Sinkroni strojevi Asinkroni strojevi Strojevi istosmjerne struje Posebne vrste motora 13.1 Načelni model električnog stroja Električni strojevi pretvaraju
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
FAKULTET PROMETNIH ZNANOSTI
 SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
Osnove elektromotornih pogona Laboratorijske vježbe
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU Osnove elektromotornih pogona Laboratorijske vježbe Vježba 2 POGON TROFAZNOG ASINKRONOG MOTORA NAPAJANOG
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVOD ZA ELEKTROSTROJARSTVO I AUTOMATIZACIJU Osnove elektromotornih pogona Laboratorijske vježbe Vježba 2 POGON TROFAZNOG ASINKRONOG MOTORA NAPAJANOG
Trofazni sustav. Uvodni pojmovi. Uvodni pojmovi. Uvodni pojmovi
 tranica: X - 1 tranica: X - 2 rofazni sustav inijski i fazni naponi i struje poj zvijezda poj trokut imetrično i nesimetrično opterećenje naga trofaznog sustava Uvodni pojmovi rofazni sustav napajanja
tranica: X - 1 tranica: X - 2 rofazni sustav inijski i fazni naponi i struje poj zvijezda poj trokut imetrično i nesimetrično opterećenje naga trofaznog sustava Uvodni pojmovi rofazni sustav napajanja
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
INTELIGENTNO UPRAVLJANJE
 INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
ELEKTROTEHNIKA 6. TROFAZNI SUSTAV IZMJENIČNE STRUJE. Izv.prof. dr.sc. Vitomir Komen, dipl.ing. el.
 EEKTROTEHNKA 6. TROAZN SSTAV ZMJENČNE STRJE zv.prof. dr.sc. Vitomir Komen, dipl.ing. el. EEKTROTEHNKA :: 6. Trofazni sustav izmjenične struje 1/4 SADRŽAJ: 6.1 vod u trofazni sustav izmjenične struje 6.
EEKTROTEHNKA 6. TROAZN SSTAV ZMJENČNE STRJE zv.prof. dr.sc. Vitomir Komen, dipl.ing. el. EEKTROTEHNKA :: 6. Trofazni sustav izmjenične struje 1/4 SADRŽAJ: 6.1 vod u trofazni sustav izmjenične struje 6.
TRANSFORMATORI. opća mreža (400 kv - izbacivanje 220kV) razdjelna mreža (110, 35, 20 kv) (izbacivanje 10 kv) na 400 kv.
 razdjelna mreža (110, 35, 20 kv) (izbacivanje 10 kv) na 400 kv.") ANSFOMAOI opća mreža (400 kv - izbacivanje 0kV) na 400 kv razdjelna mreža (0, 35, 0 kv) (izbacivanje 0 kv) potrošna mreža ransformator u praznom hodu N - primarni N - sekundarni GN - gornjeg napona DN
ANSFOMAOI opća mreža (400 kv - izbacivanje 0kV) na 400 kv razdjelna mreža (0, 35, 0 kv) (izbacivanje 0 kv) potrošna mreža ransformator u praznom hodu N - primarni N - sekundarni GN - gornjeg napona DN
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA. Zavod za elektrostrojarstvo i automatizaciju. Predmet:
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Zavod za elektrostrojarstvo i automatizaciju Predmet: Elektromehaničke i električne pretvorbe Sinkroni stroj Doc. dr. sc. Mario Vražić Zagreb,
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Zavod za elektrostrojarstvo i automatizaciju Predmet: Elektromehaničke i električne pretvorbe Sinkroni stroj Doc. dr. sc. Mario Vražić Zagreb,
Strukture podataka i algoritmi 1. kolokvij 16. studenog Zadatak 1
 Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Reaktancije transformatora (1) Dvonamotni transformatori
 Dvonamotni transformatori") Reaktancije transformatora (1) Dvonamotni transformatori Nadomjesna shema (T-shema): 1 k1 / ' k1 / n1 / n V n1 m V n1 ' V n Reaktancija k1 dobiva se mjerenjem u pokusu kratkog spoja: V k1 I n1 I n V k1
Reaktancije transformatora (1) Dvonamotni transformatori Nadomjesna shema (T-shema): 1 k1 / ' k1 / n1 / n V n1 m V n1 ' V n Reaktancija k1 dobiva se mjerenjem u pokusu kratkog spoja: V k1 I n1 I n V k1
Prof.dr.sc. Jasmin Velagić. Kolegij: Aktuatori
 Lekcija 2 Električki strojevi Prof.dr.sc. Jasmin Velagić Elektrotehnički fakultet Sarajevo Kolegij: Aktuatori 2.1. Električki strojevi Koriste se kao izvršni članovi za pokretanje radnih mehanizama. Prema
Lekcija 2 Električki strojevi Prof.dr.sc. Jasmin Velagić Elektrotehnički fakultet Sarajevo Kolegij: Aktuatori 2.1. Električki strojevi Koriste se kao izvršni članovi za pokretanje radnih mehanizama. Prema
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
Uvod. Asinhrona mašina se u primjeni najčešće koristi kao motor, i to trofazni, iako može da radi i kao generator.
 Asinhrone mašine Uvod Asinhrona mašina se u primjeni najčešće koristi kao motor, i to trofazni, iako može da radi i kao generator. Prednosti asinhronih mašina, u odnosu na ostale vrste električnih mašina,
Asinhrone mašine Uvod Asinhrona mašina se u primjeni najčešće koristi kao motor, i to trofazni, iako može da radi i kao generator. Prednosti asinhronih mašina, u odnosu na ostale vrste električnih mašina,
Transformatori. Transformatori
 Transformatori 3 4 5 6 7 8 9 0 r t h Transformatori n e Fizikalna slika rada transformatora Stvarni transformator Reduciranje transformatorskih veličina Pokus praznog hoda i kratkog spoja Nadomjesna shema
Transformatori 3 4 5 6 7 8 9 0 r t h Transformatori n e Fizikalna slika rada transformatora Stvarni transformator Reduciranje transformatorskih veličina Pokus praznog hoda i kratkog spoja Nadomjesna shema
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
1.4 Tangenta i normala
 28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
INTEGRALNI RAČUN. Teorije, metodike i povijest infinitezimalnih računa. Lucija Mijić 17. veljače 2011.
 INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
Unipolarni tranzistori - MOSFET
 nipolarni tranzistori - MOSFET ZT.. Prijenosna karakteristika MOSFET-a u području zasićenja prikazana je na slici. oboaćeni ili osiromašeni i obrazložiti. b olika je struja u točki, [m] 0,5 0,5,5, [V]
nipolarni tranzistori - MOSFET ZT.. Prijenosna karakteristika MOSFET-a u području zasićenja prikazana je na slici. oboaćeni ili osiromašeni i obrazložiti. b olika je struja u točki, [m] 0,5 0,5,5, [V]
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
VJEŽBE 3 BIPOLARNI TRANZISTORI. Slika 1. Postoje npn i pnp bipolarni tranziostori i njihovi simboli su dati na slici 2 i to npn lijevo i pnp desno.
 JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
Elektronički Elementi i Sklopovi
 Elektronički Elementi i Sklopovi Sadržaj predavanja: 1. Teoretski zadaci sa diodama 2. Analiza linije tereta 3. Elektronički sklopovi sa diodama 4. I i ILI vrata 5. Poluvalni ispravljač Teoretski zadaci
Elektronički Elementi i Sklopovi Sadržaj predavanja: 1. Teoretski zadaci sa diodama 2. Analiza linije tereta 3. Elektronički sklopovi sa diodama 4. I i ILI vrata 5. Poluvalni ispravljač Teoretski zadaci
FILOZOFSKI FAKULTET U RIJECI ODSJEK ZA POLITEHNIKU. PRAKTIKUM ELEKTROMEHANIKE (upute za vježbe)
") FILOZOFSKI FKULTET U RIJEI ODSJEK Z POLITEHNIKU PRKTIKUM ELEKTROMEHNIKE (upute za vježbe) SDRŽJ Vježba. JEDNOFZNI SINKRONI MOTOR..... Provjera oznaka namota statora i rotora te mjerenje otpora namota.....2
FILOZOFSKI FKULTET U RIJEI ODSJEK Z POLITEHNIKU PRKTIKUM ELEKTROMEHNIKE (upute za vježbe) SDRŽJ Vježba. JEDNOFZNI SINKRONI MOTOR..... Provjera oznaka namota statora i rotora te mjerenje otpora namota.....2
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
UČINSKI PRETVARAČI ZA EMP s ASINKRONIM STROJEM
 UČINSKI PRETVARAČI ZA EMP s ASINKRONIM STROJEM SADRŽAJ Skalarni matematički model, nadomjesna shema, vektorski dijagram Bilanca snage za motorski i generatorski način rada Upravljanje brzinom vrtnje pomoću
UČINSKI PRETVARAČI ZA EMP s ASINKRONIM STROJEM SADRŽAJ Skalarni matematički model, nadomjesna shema, vektorski dijagram Bilanca snage za motorski i generatorski način rada Upravljanje brzinom vrtnje pomoću
ELEKTRIČNE MAŠINE Sinhrone mašine
 ELEKTRIČNE MAŠINE Sinhrone mašine Uvod Sinhrone mašine predstavljaju mašine naizmenične struje. Koriste se uglavnom kao generatori električne energije naizmenične struje, te stoga predstavljaju jedan od
ELEKTRIČNE MAŠINE Sinhrone mašine Uvod Sinhrone mašine predstavljaju mašine naizmenične struje. Koriste se uglavnom kao generatori električne energije naizmenične struje, te stoga predstavljaju jedan od
PROIZVODNJA TROFAZNOG SISTEMA SIMETRIČNIH NAPONA
 PROIZVODNJA TROFAZNOG SISTEMA SIMETRIČNIH NAPONA Za proizvodnju trofaznog sistea sietričnih napona najčešće se koriste trofazni sinhroni generatori. Osnovni konstrukcijski dijelovi generatora su stator
PROIZVODNJA TROFAZNOG SISTEMA SIMETRIČNIH NAPONA Za proizvodnju trofaznog sistea sietričnih napona najčešće se koriste trofazni sinhroni generatori. Osnovni konstrukcijski dijelovi generatora su stator
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
Pomorski fakultet u Rijeci Brodostrojarski smjer BRODSKI ELEKTRIČNI UREĐAJI
 Pomorski fakultet u Rijeci Brodostrojarski smjer BRODSKI ELEKTRIČNI UREĐAJI Dr. sc. Dubravko Vučetić 1.KOLOKVIJ ver 5. (01) OSNOVE ELEKTROAGNETIZA 1. FORIRANJE AGNETSKOG POLJA U ELEKTRIČNI STROJEVIA Oko
Pomorski fakultet u Rijeci Brodostrojarski smjer BRODSKI ELEKTRIČNI UREĐAJI Dr. sc. Dubravko Vučetić 1.KOLOKVIJ ver 5. (01) OSNOVE ELEKTROAGNETIZA 1. FORIRANJE AGNETSKOG POLJA U ELEKTRIČNI STROJEVIA Oko
Rad, snaga, energija. Tehnička fizika 1 03/11/2017 Tehnološki fakultet
 Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
4. Regulacija AM u KSP V. Ambrožič: Izabrana predavanja iz UEMP, TF Rijeka 4. VEKTORSKA REGULACIJA ASINKRONOG MOTORA
 4. VEKTORSKA REGULACIJA ASINKRONOG MOTORA 4.1 Regulacija istosmjernog stroja s neovisnom uzbudom ε mikroračunalo i/ili upravljačka elektronika energetski sklop motor ω α ω regulator brzine α* i * α regulator
4. VEKTORSKA REGULACIJA ASINKRONOG MOTORA 4.1 Regulacija istosmjernog stroja s neovisnom uzbudom ε mikroračunalo i/ili upravljačka elektronika energetski sklop motor ω α ω regulator brzine α* i * α regulator
BRODSKI ELEKTRIČNI UREĐAJI SUSTAVI
 SVEUČILIŠTE U RIJECI POMORSKI FAKULTET Brodostrojarstvo BRODSKI ELEKTRIČNI UREĐAJI SUSTAVI Dr. sc. Dubravko Vučetić Rijeka, 2015. Sadržaj 1. OSNOVE ELEKTROMAGNETIZMA... 1 1.1. FORMIRANJE MAGNETSKOG POLJA
SVEUČILIŠTE U RIJECI POMORSKI FAKULTET Brodostrojarstvo BRODSKI ELEKTRIČNI UREĐAJI SUSTAVI Dr. sc. Dubravko Vučetić Rijeka, 2015. Sadržaj 1. OSNOVE ELEKTROMAGNETIZMA... 1 1.1. FORMIRANJE MAGNETSKOG POLJA
BRODSKI ELEKTRIČNI UREĐAJI. Prof. dr Vladan Radulović
 FAKULTET ZA POMORSTVO OSNOVNE STUDIJE BRODOMAŠINSTVA BRODSKI ELEKTRIČNI UREĐAJI Prof. dr Vladan Radulović ELEKTRIČNA ENERGIJA Električni sistem na brodu obuhvata: Proizvodnja Distribucija Potrošnja Sistemi
FAKULTET ZA POMORSTVO OSNOVNE STUDIJE BRODOMAŠINSTVA BRODSKI ELEKTRIČNI UREĐAJI Prof. dr Vladan Radulović ELEKTRIČNA ENERGIJA Električni sistem na brodu obuhvata: Proizvodnja Distribucija Potrošnja Sistemi
1 Promjena baze vektora
 Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
, Zagreb. Prvi kolokvij iz Analognih sklopova i Elektroničkih sklopova
 Grupa A 29..206. agreb Prvi kolokvij Analognih sklopova i lektroničkih sklopova Kolokvij se vrednuje s ukupno 42 boda. rijednost pojedinog zadatka navedena je na kraju svakog zadatka.. a pojačalo na slici
Grupa A 29..206. agreb Prvi kolokvij Analognih sklopova i lektroničkih sklopova Kolokvij se vrednuje s ukupno 42 boda. rijednost pojedinog zadatka navedena je na kraju svakog zadatka.. a pojačalo na slici
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
Prostorni spojeni sistemi
 Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Trofazno trošilo je simetrično ako su impedanse u sve tri faze međusobno potpuno jednake, tj. ako su istog karaktera i imaju isti modul.
 Zadaci uz predavanja iz EK 500 god Zadatak Trofazno trošilo spojeno je u zvijezdu i priključeno na trofaznu simetričnu mrežu napona direktnog redoslijeda faza Pokazivanja sva tri idealna ampermetra priključena
Zadaci uz predavanja iz EK 500 god Zadatak Trofazno trošilo spojeno je u zvijezdu i priključeno na trofaznu simetričnu mrežu napona direktnog redoslijeda faza Pokazivanja sva tri idealna ampermetra priključena
RIJEŠENI ZADACI I TEORIJA IZ
 RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
IZRADA MAKETE ZA REGULCIJU BRZINE VRTNJE ISTOSMJERNOG MOTORA
 Završni rad br. 357/EL/2015 IZRADA MAKETE ZA REGULCIJU BRZINE VRTNJE ISTOSMJERNOG MOTORA Mihael Buhin, 5031 Varaždin, rujan 2015. godine Odjel za Elektrotehniku Završni rad br. 357/EL/2015 IZRADA MAKETE
Završni rad br. 357/EL/2015 IZRADA MAKETE ZA REGULCIJU BRZINE VRTNJE ISTOSMJERNOG MOTORA Mihael Buhin, 5031 Varaždin, rujan 2015. godine Odjel za Elektrotehniku Završni rad br. 357/EL/2015 IZRADA MAKETE
DINAMIČKI MODEL (SIMETRIČNOG) TROFAZNOG ASINHRONOG MOTORA
 TROFAZNOG ASINHRONOG MOTORA") DINAMIČKI MODEL (SIMETRIČNOG) TROFAZNOG ASINHRONOG MOTORA bs as cs bs br cr br ar br ar cr ar cr bs cs as 1856-1943 cs as Asinhroni (indukcioni) motor Patent iz1888 godine Naponska jednačina: u u R i t
DINAMIČKI MODEL (SIMETRIČNOG) TROFAZNOG ASINHRONOG MOTORA bs as cs bs br cr br ar br ar cr ar cr bs cs as 1856-1943 cs as Asinhroni (indukcioni) motor Patent iz1888 godine Naponska jednačina: u u R i t
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
UZDUŽNA DINAMIKA VOZILA
 UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Tranzistori s efektom polja. Postupak. Spoj zajedničkog uvoda. Shema pokusa
 Tranzistori s efektom polja Spoj zajedničkog uvoda U ovoj vježbi ispitujemo pojačanje signala uz pomoć FET-a u spoju zajedničkog uvoda. Shema pokusa Postupak Popis spojeva 1. Spojite pokusni uređaj na
Tranzistori s efektom polja Spoj zajedničkog uvoda U ovoj vježbi ispitujemo pojačanje signala uz pomoć FET-a u spoju zajedničkog uvoda. Shema pokusa Postupak Popis spojeva 1. Spojite pokusni uređaj na
Grafičko prikazivanje atributivnih i geografskih nizova
 Grafičko prikazivanje atributivnih i geografskih nizova Biserka Draščić Ban Pomorski fakultet u Rijeci 17. veljače 2011. Grafičko prikazivanje atributivnih nizova Atributivni nizovi prikazuju se grafički
Grafičko prikazivanje atributivnih i geografskih nizova Biserka Draščić Ban Pomorski fakultet u Rijeci 17. veljače 2011. Grafičko prikazivanje atributivnih nizova Atributivni nizovi prikazuju se grafički
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
Osnove elektrotehnike I popravni parcijalni ispit VARIJANTA A
 Osnove elektrotehnike I popravni parcijalni ispit 1..014. VARIJANTA A Prezime i ime: Broj indeksa: Profesorov prvi postulat: Što se ne može pročitati, ne može se ni ocijeniti. A C 1.1. Tri naelektrisanja
Osnove elektrotehnike I popravni parcijalni ispit 1..014. VARIJANTA A Prezime i ime: Broj indeksa: Profesorov prvi postulat: Što se ne može pročitati, ne može se ni ocijeniti. A C 1.1. Tri naelektrisanja
ELEKTROMOTORNI POGONI SA ASINHRONIM MOTOROM
 ELEKTROOTORNI POGONI SA ASINHRONI OTORO Poučavamo amo pogone a tofaznim motoom. Najčešće koišćeni moto u elektomotonim pogonima. Ainhoni moto: - jednotavna kontukcija; - mala cena; - vioka enegetka efikanot.
ELEKTROOTORNI POGONI SA ASINHRONI OTORO Poučavamo amo pogone a tofaznim motoom. Najčešće koišćeni moto u elektomotonim pogonima. Ainhoni moto: - jednotavna kontukcija; - mala cena; - vioka enegetka efikanot.
TRANSFORMATORI. TR.1 - Princip rada, prazni hod, gubici, korisnost, matematički model, nadomjesna shema i fazorski dijagram
 FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ELEKTROMEHANIČKE I ELEKTRIČNE PRETVORBE TRANSFORMATORI TR.1 - Princip rada, prazni hod, gubici, korisnost, matematički model, nadomjesna shema i fazorski dijagram
FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ELEKTROMEHANIČKE I ELEKTRIČNE PRETVORBE TRANSFORMATORI TR.1 - Princip rada, prazni hod, gubici, korisnost, matematički model, nadomjesna shema i fazorski dijagram
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
IZRADA NEIZRAVNOG FREKVENCIJSKOG PRETVARAČA POMOĆU ARDUINA
 SVEUČILIŠTE SJEVER SVEUČILIŠNI CENTAR VARAŽDIN ZAVRŠNI RAD br. 356/EL/2015 IZRADA NEIZRAVNOG FREKVENCIJSKOG PRETVARAČA POMOĆU ARDUINA ŠANTALAB IVAN Varaždin, rujan 2015. SVEUČILIŠTE SJEVER SVEUČILIŠNI
SVEUČILIŠTE SJEVER SVEUČILIŠNI CENTAR VARAŽDIN ZAVRŠNI RAD br. 356/EL/2015 IZRADA NEIZRAVNOG FREKVENCIJSKOG PRETVARAČA POMOĆU ARDUINA ŠANTALAB IVAN Varaždin, rujan 2015. SVEUČILIŠTE SJEVER SVEUČILIŠNI
TRIGONOMETRIJA TROKUTA
 TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
Snaga izmjenične sinusne struje
 1 11 1 13 14 15 16 17 18 r t h Snaga izmjenične sinusne struje n e Izmjenična sinusna struja i napon Djelatna snaga Induktivna jalova snaga Kapacitivna jalova snaga Snaga serijskog RLC spoja Snaga paralelnog
1 11 1 13 14 15 16 17 18 r t h Snaga izmjenične sinusne struje n e Izmjenična sinusna struja i napon Djelatna snaga Induktivna jalova snaga Kapacitivna jalova snaga Snaga serijskog RLC spoja Snaga paralelnog
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika. Monotonost i ekstremi. Katica Jurasić. Rijeka, 2011.
 Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
TRANSFORMATORI. TR.1 - Matematički model, nadomjesna shema, fazorski dijagram, paralelni rad, hlađenje, prenaponi. Prof. dr. sc.
 FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA TEORIJA ELEKTRIČNIH STROJEVA I TRANSFORMATORA TRANSFORMATORI TR. - Matematički model, nadomjesna shema, fazorski dijagram, paralelni rad, hlađenje, prenaponi Prof.
FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA TEORIJA ELEKTRIČNIH STROJEVA I TRANSFORMATORA TRANSFORMATORI TR. - Matematički model, nadomjesna shema, fazorski dijagram, paralelni rad, hlađenje, prenaponi Prof.
STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA
 Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
Katedra za elektroniku Elementi elektronike Laboratorijske vežbe Vežba br. 2 STATIČKE KARAKTERISTIKE DIODA I TRANZISTORA Datum: Vreme: Studenti: 1. grupa 2. grupa Dežurni: Ocena: Elementi elektronike -
radni nerecenzirani materijal za predavanja R(f) = {f(x) x D}
 = {f(x) x D}") Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Zadaci za pripremu. Opis pokusa
 5. EM: OSCILOSKOP 1. Nacrtajte blok shemu analognog osciloskopa i kratko je opišite. 2. Na zastoru osciloskopa dobiva se prikazana slika. Kolika je efektivna vrijednost i frekvencija priključenog napona,
5. EM: OSCILOSKOP 1. Nacrtajte blok shemu analognog osciloskopa i kratko je opišite. 2. Na zastoru osciloskopa dobiva se prikazana slika. Kolika je efektivna vrijednost i frekvencija priključenog napona,
= 6.25 Ω I B1 = 3U =529 Ω I B2 = 3U = 1905 Ω I B3G = 3U
 1. Za EES dat na slici: a) odrediti bazne struje i impedanse elemenata ako je S B = 100 MVA, a naponi jednaki nominalnim vrijednostima napona pojedinih naponskih nivoa, b) Nacrtati ekvivalentne šeme direktnog,
1. Za EES dat na slici: a) odrediti bazne struje i impedanse elemenata ako je S B = 100 MVA, a naponi jednaki nominalnim vrijednostima napona pojedinih naponskih nivoa, b) Nacrtati ekvivalentne šeme direktnog,
Riješeni zadaci: Limes funkcije. Neprekidnost
 Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
SEMINAR IZ KOLEGIJA ANALITIČKA KEMIJA I. Studij Primijenjena kemija
 SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
Linearna algebra 2 prvi kolokvij,
 1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika