PROIECŢII CARTOGRAFICE. Sef. lucr. dr. Mihai Valentin HERBEI
|
|
|
- Φωτινή Δεσποτόπουλος
- 8 χρόνια πριν
- Προβολές:
Transcript


1 PROIECŢII CARTOGRAFICE Sef. lucr. dr. Mihai Valentin HERBEI
2 OBIECTUL ŞI IMPORTANŢA CARTOGRAFIEI
3 Cartografia este ştiinţa care studiază baza matematică a hărţilor, metodele lor de construcţie şi multiplicare. Fiind o ştiinţă aplicată, ea are ca scop executarea diferitelor genuri de opere cartografice necesare nevoilor economiei naţionale şi apărării naţionale. De aceea, în problemele cartografiei intră de asemenea şi stabilirea metodelor de întocmire, pregătire pentru editare, editarea şi redactarea hărţilor, precum şi principiile organizării şi planificării producţiei cartografice. Cartografia este ştiinţa care se ocupă cu întocmirea şi utilizarea hărţilor. Cu timpul a devenit o ştiinţă independentă, cu următoarele ramuri: cartologia - se ocupă cu analiza hărţilor, inclusiv cu evoluţia istorică a acestora; cartografia matematică sau teoria proiecţiilor - se ocupă cu studiul diferitelor sisteme de a reprezenta elipsoidul terestru pe un plan; întocmirea hărţilor - studiază metodele necesare pentru întocmirea originalului hărţii; cartoreproducerea - studiază metodele şi procedeele tehnice de editare a originalului hărţii şi de multiplicare a lui; cartometria - este ramura cartografiei care studiază instrumentele şi metodele cu ajutorul cărora se pot face diferite măsurători pe hartă.
4 Obiectul de studiu al cartografiei l-a constituit la început, reprezentarea suprafeţei terestre pe o suprafaţă plană, care este harta. Cartografia este legată de alte ştiinţe naturale, tehnice, filozofice etc., cu care se găseşte într-o interdependenţă evolutivă. Cartografia a preluat concepte ale altor ştiinţe, dar a şi contribuit la dezvoltarea acestora. O deosebită importanţă o au legăturile cu ştiinţele Pământului (geoştiinţele) şi ale planetelor care includ: geodezia, topografia, fotogrammetria, teledetecţia, geografia, ecologia, astronomia, planetologia etc.
5 ISTORICUL CARTOGRAFIEI

. Reprezentarea cartografică pe")
")
6 Reprezentare a traseelor cu aur din Egiptul Antic, acum la Torino, din timpul regelui Seti I ( î.hr.). Reprezentarea cartografică pe tăbliţă de argilă de la sfârşitul mil.iii Papirusul policrom ( Egipt) (100 î.hr)
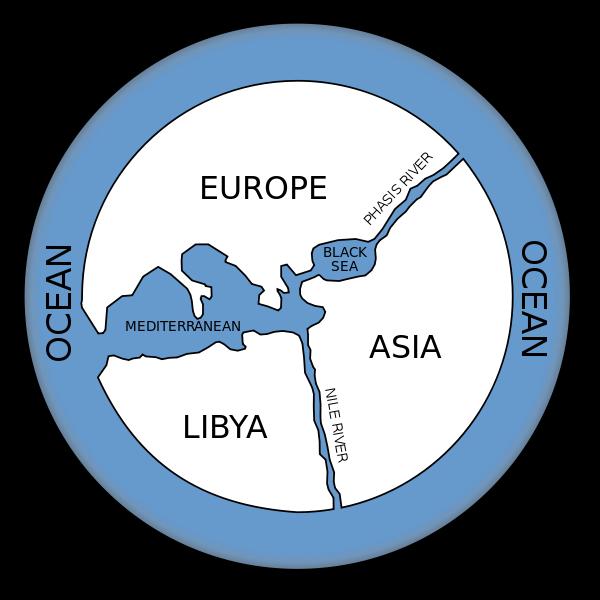

7 Anaximandru din Milet ( î.e.n.) 7


8 Lumea cunoscuta pe vremea lui Eratostene, in forma plata
. Cunoscând catetele, Eratostene a calculat valoarea unghiului A, 7.")
 9 Circumferinta reala 40.")
9 Turnul din Alexandria, umbra şi raza solară formează un triunghi dreptunghic (portocaliu). Cunoscând catetele, Eratostene a calculat valoarea unghiului A, 7. grade. Dar cum unghiul A este egal cu B, acesta din urmă are aceeaşi valoare. 7, grade km 360 grade? (circumferinţa km) 9 Circumferinta reala ,4 km


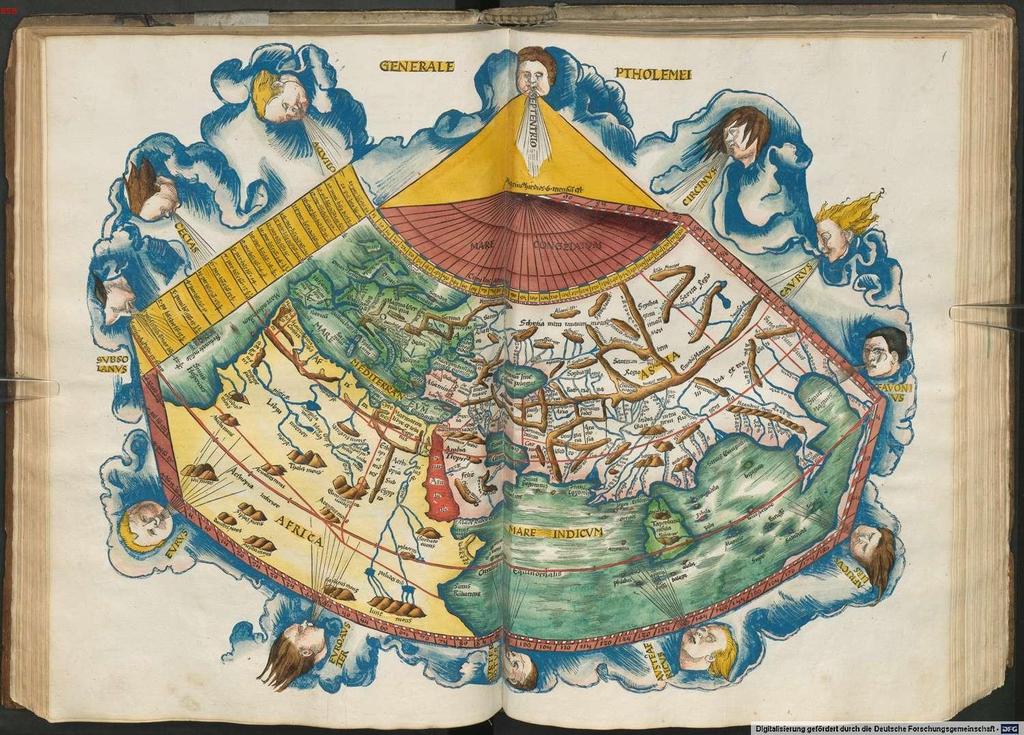

10 Claudiu Ptolemeu (87 d.hr. 165 d.hr.)
 privind teritoriul Daciei între munţii Carpaţi şi")
11 Fragment din harta lui Claudius Ptolomaeus (sec. II p. Chr.) privind teritoriul Daciei între munţii Carpaţi şi Balcani

12 Tabula Peutingeriana Transilvania

13 Portulan de la sfârșitul secolului al XIII-lea

")
14 Gerhard Kremer Mercator ( ) Harta lumii


15 Atlasul lui Mercator Transilvania

")
16 Abraham Ortelius ( )
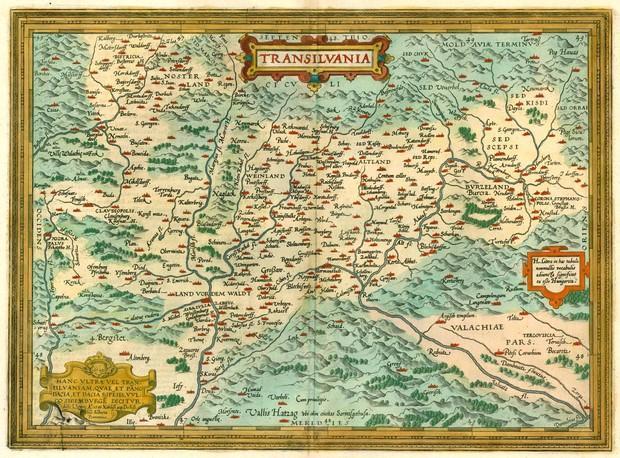
17 Harta Transilvaniei (1570)

18 Harta Cassini (fragment-regiunea pariziană)

19 OBSERVATORUL ASTRONOMIC DE LA GRADISTEA DE MUNTE (SARMIZEGETUSA)

20 Harta Stolnicului Cantacuzino (1701)


21 Prima hartă a Moldovei (Dimitrie Cantemir)

")
22 Porţiune din Harta lui Cuza (Satmari) 1864 (Bucuresti)

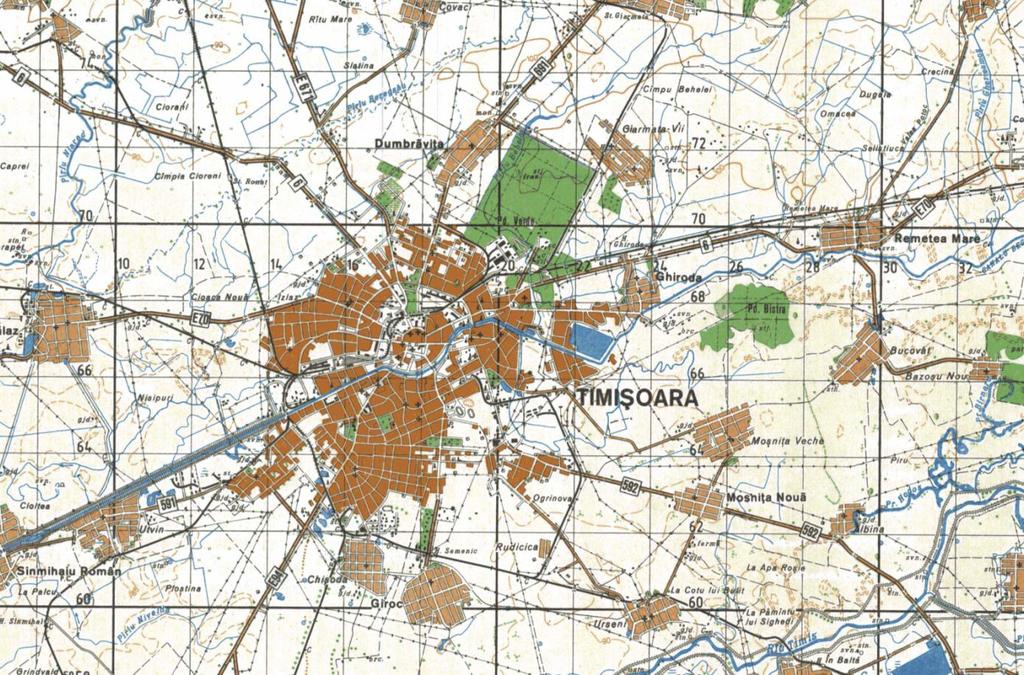
23 Harta Timisoarei si a imprejurimilor de la 1769


24 Harta cetatii Timisoara - Scara 1:8.800

25 Timisoara 1910
26

27 PLANURI DIRECTORALE DE TRAGERE
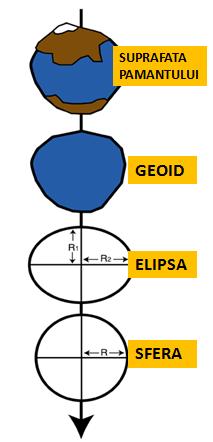
28 FORMA ŞI APROXIMAREA PĂMÂNTULUI
 SUPRAFAŢA DE REFERINŢĂ")
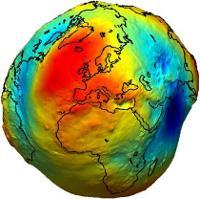
29 SUPRAFETE DE REFERINTA SUPRAFAŢA FIZICĂ TERESTRA (TOPO) SUPRAFAŢA DE REFERINŢĂ GEOIDUL
30 ELIPSOIDUL DE REFERINŢĂ Prin elipsoid de referinţă se înţelege elipsoidul terestru general, adoptat convenţional, care aproximează cel mai bine geoidul. Suprafaţa acestui elipsoid este o suprafaţă pur geometrică şi convenţională, faţă de care se defineşte poziţia geoidului şi faţă de care se determină poziţia unor puncte de pe teren prin coordonate geografice. P(x p, y p, z p ) - punct aparţinând elipsoidului Prin intermediul celor două semiaxe se definesc: prima excentricitate, notată cu e ; a doua excentricitatea, notată cu e' ; turtirea, notată cu α sau f ;
31 Elipsoizi utilizaţi în România Denumirea Anul Semiaxa Turtirea Perioada de elicoidului determinării mare (m) geometrică utilizare în de referinţă România Bessel ,115 1:99, Clarke ,145 1:93, Hayfort ,000 1:97, Krasovski ,000 1:98, WGS ,000 1:98,57 199
32 SISTEME DE REFERINŢĂ ŞI DE COORDONATE Un sistem de referinţă şi de coordonate este constituit dintr-un datum şi un sistem de coordonate.
33 Datum geodezic Datumul geodezic este un set de convenţii (set de parametrii, deci fără erori) care stabileşte relaţii spaţiale între un sistem de coordonate şi Pământ. Acesta defineşte forma şi dimensiunile Pământului precum şi originea şi orientarea unui sistem de coordonate utilizat la reprezentarea suprafeţei terestre. În România s-a adoptat datum-ul Pulkovo 4 (ce poate fi găsit şi sub denumirea Dealul Piscului ), derivat din elipsoidul Krasovsky. Pe viitor se doreşte pentru conformitatea cartografică cu Europa, să se adopte datumul WGS84 (bazat pe sferoidul GRS80). DATUM = ELIPSOID + PUNCT DE CONSTRANGERE
34 Sisteme de coordonate Un Sistem de coordonate reprezintă un cadru de referință bidimensional sau tridimensional, alcătuit din: Set de puncte, linii și / sau suprafețe Set de reguli utilizate pentru definirea poziției punctelor din spațiu
35 Există trei tipuri de coordonate: Altitudinea sau înălţimea (mai puţin utilizat termenul de cotă) exprimă distanţa pe verticală între o poziţie şi o suprafaţă orizontală definită ca referinţă; Coordonate geografice exprimă în termeni de latitudine şi longitudine poziţia unui obiect pe sferă sau elipsoid; Coordonate carteziene sau coordonate în sistemul de proiecţie al hărţii care exprimă poziţia unui obiect, în termeni de nord şi est, pe un plan pe care a fost proiectată suprafaţa terestră.

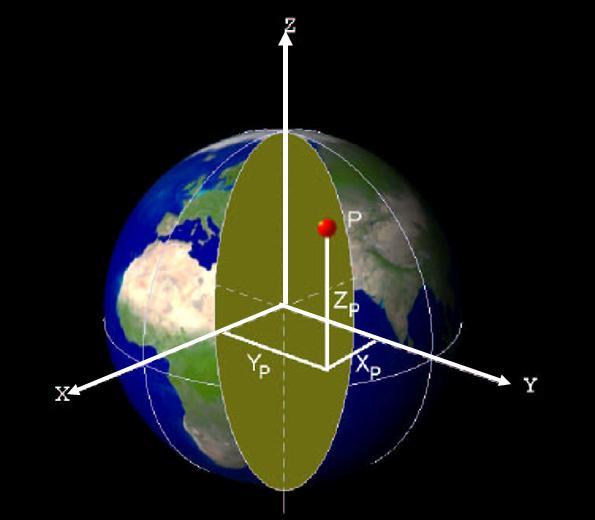
36 COORDONATE CARTEZIENE Sistemul de coordonate carteziene este sistemul a cărui axe sunt ortogonale. Sistemul de referinţă cartezian este folosit la suprafeţele plane de proiecţie.
37
38 COORDONATE GEOGRAFICE Sistemul de Coordonatele geografice este sistemul de coordonate care utilizează latitudinea și longitudinea pentru definirea locației punctelor de pe suprafața terestră.

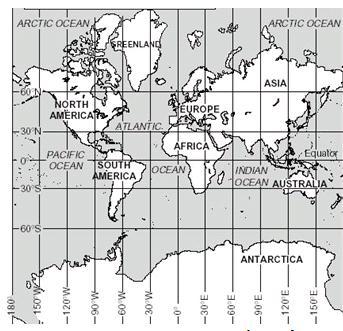
39 Prin intersecţia planelor ce conţin axa polilor şi suprafaţa terestră, rezulta meridianele. Prin intersecţia globului terestru cu planele paralele la Ecuator, rezultă paralelele

40 Din infinitatea de meridiane, se considera în mod convenţional ca meridian 0 meridianul care trece prin observatorul Greenwich Unghiul diedru format de planul meridian ce trece prin Greenwich, şi planul meridian al locului, se numeşte longitudine, notată cu Longitudinea poate fi W sau E


41
42 Paralela 0 sau paralela medie este considerată Ecuatorul EE'. Unghiul format de verticala locului şi proiecţia acesteia pe planul ecuatorial, se numeşte latitudine, notată cu Latitudinea poate fi N sau S
43 P' V P 0 E O E' O 1 P
44 Sistemul Terestru de Referinţă Internaţional - International Terrestrial Reference System
45 ELEMENTE DE DEFINIRE A ELIPSOIDULUI DE REFERINŢĂ PARAMETRII ELIPSOIDULUI DE REFERINŢĂ Considerăm suprafața elipsoidului de referință ca suprafață a unui elipsoid de rotație ; atunci se poate admite că acesta rezultă prin rotația unei elipse meridiane în jurul axei mici. Fie elipsa meridiană ce generează elipsoidul de rotație situată în planul xoz E x a P b O P' z b z x P a z P 1 P 0 P' 0 E' x a - semiaxa mare ecuatorială a elipsoidului ; b - semiaxa mică polară a elipsoidului. Prin intermediul celor două semiaxe se definesc: prima excentricitate, notată cu e ; a doua excentricitatea, notată cu e' ; turtirea, notată cu α ; e a b ; a b ; a b a b a e Parametrii a, b, e, e', α sunt parametrii de bază care determină elipsa meridiană, problema fiind rezolvabilă în cazul în care sunt cunoscuți doi dintre aceștia (din care un parametru fiind o lungime).
46 b a b e 1 ; e 1; 1 a b a b a b 1 e ;1 e ;1 a b a 1 1 b 1 e ;1 e ;(1 ) 1e 1e a 1 1 b e 1e 1e a e e e e ; e ; 1e 1e 1 ; e 1;1 (S-a considerat 0 fiind foarte mic). Un parametru întâlnit foarte frecvent în calculele geodezice îl constituie şi raza de curbură polară C exprimată prin relația: C a b
47 P' ECUAŢIILE PARAMETRICE ALE ELIPSOIDULUI DE REFERINŢĂ EE 1 diametrul cercului ecuatorului; PGP meridianul origine; E'E' 1 diametrul paralelului punctului oarecare M o ; normala la suprafaţa elipsoidului a punctului M o ; V tangenta în M o la curba meridiana ; T m T p tangenta în M o la paralelul punctului M o z P Tm V E' Gr O' 1 r S M 0 E' 1 F Tp E x O 1 O E 1 y
48 A stabili ecuațiile parametrice ale elipsoidului de referința înseamnă a stabili o corespondenta între cele doua sisteme de coordonate, de forma : x f (, ) y g(, ) z h( ) În acest scop considerăm elipsa meridiană ce trece prin M o. Punctul M o fiind punct curent pe elipsa meridiană va avea coordonate r,z care verifica relaţia: E z P M' 0 dz O r=x M 0 O O 1 P' d M'' 0 r a E b z 1 x 1 Notăm : a cos r W a z W (1 e )sin 1 e sin W ecuațiile parametrice ale elipsei meridiane a cos cos x W a cos sin ecuațiile parametrice ale y W elipsoidului de referință a(1 e )sin z W
49 RAZE DE CURBURĂ ÎNTR-UN PUNCT SITUAT PE SUPRAFAŢA ELIPSOIDULUI DE REFERINŢĂ Expresia razei mici de curbură M E z P O 1 M O' d M' 0 ds M 0 E 1 x ds M Md ds d ds dr dz M dr dz d M a(1 e W 3 ) P' M dr dz ( ) ( ) d d
50 P' Raza mare de curbură N z E P O r M 0 O 1 O N E 1 x N r cos SAU N a W P' Expresia razei de curbură după o direcţie oarecare V z P E O 1 R O 0 M 0 E 1 x R MN N cos M sin
51 Expresia razei medii de curbură R m V-verticala M O' O P N C R G MN ecuator meridian
52 LUNGIMEA ARCULUI DE MERIDIAN Considerăm egalitatea ds Md cu ajutorul căreia putem stabili lungimea arcului de meridian cuprinsa între doua puncte P 1 si P de latitudinea φ 1 şi φ situate pe aceasta şi scriem : S 1 P 1 ds 1 Md M a(1 e W P 3 S1 a(1 e ) (1 e sin ) 1 ) 3 d Practic, pentru a calcula arcul de meridian de lungime finită folosim relaţia: S m ( 1, ) Sm(0, ) Sm(0, 1) În care:
53 LUNGIMEA ARCULUI DE PARALEL Pe un paralel de raza r şi de latitudine φ se consideră două puncte P1 şi P situate la o distanţă d φ. In această situaţie vom longitudinea λ-dλ, deci între cele doua puncte exista diferenţa de longitudine dλ. Pentru arcul elementar de parale poate fi scrisa relaţia: dl rd Când punctele P1P la distanţa finită, longitudinile lor fiind λ 1 şi λ se poate stabili lungimea arcului de paralel integrând egalitatea de mai sus respectiv l 1 r 1 ( ) 1 d r
54 Practic, arcul de paralel finit se calculează cu relaţia: P E' dl d O r E' 1 E d O 1 E' P'
55 SCARA HĂRŢII. MODULI DE DEFORMARE SCARA HĂRŢII Să consideră, elipsoidul de rotaţie nu în mărime reală ci micşorat de N ori, de atâtea ori cât este necesar ca o regiune din suprafaţa sa să se poată reprezenta pe o foaie de hârtie normală servindu-ne de ecuaţiile hărţii. Notăm cu ds, elementul liniar dintre două puncte oarecare ale elipsoidului micşorat şi cu ds 0 distanţa corespunzătoare de pe suprafaţa elipsoidului terestru(neredus). Vom nota cu 0 şi vom numi scară principală sau generală a hărţii raportul: 0 ds ds 0 Sau: 0 1 N ds ( N ) ds 0
56 MODULUL DE DEFORMARE LINIARĂ Deformaţia liniară este exprimată, de obicei, prin raportul dintre elementul liniar din planul de proiecţie şi elementul de arc de pe suprafaţa folosită pentru aproximarea formei Pământului. Notăm cu şi vom numi modul de deformare liniară, raportul dintre elementele liniare omoloage ds, ds de pe hartă şi de pe elipsoidul terestru(redus), deci: ' ds' ds
57 MODULII DE DEFORMARE AREOLARĂ ŞI UNGHIULARĂ Vom însemna cu p şi vom numi modulul de deformare areolară raportul între elementele de arie omoloage ds, ds din plan şi de pe suprafaţa terestră: ds' p ds Vom însemna cu şi vom numi modulul de deformare unghiulară relativ la direcţia, diferenţa între unghiurile şi corespunzătoare, de pe elipsoid şi din plan:
58 CURBE PE SUPRAFAŢA ELIPSOIDULUI DE REFERINŢĂ ELEMENTUL DE ARC AL UNEI CURBE TRASATE PE SUPRAFAŢA TERESTRĂ x x(, ) Se dă suprafaţa S ale cărei ecuaţii parametrice sunt: Elementul de arc al unei curbe trasată pe suprafaţa S este dat de expresia: Diferenţiind avem: dx dx dx d d d d ds dx dy y y(, ) z z(, ) dy dy dx dx dy dy dz dz dy d d ds ( d d) ( d d) ( d d) d d d d d d d d dz dz dz d d d d dz
59 sau cu notaţia lui Gauss: ) ( ) ( ) ( ) ( ) ( ) ( d dz d dy d dx G d dz d dz d dy d dy d dx d dx F d dz d dy d dx E Gd d Fd Ed ds
60 În cazul când suprafaţa S este un elipsoid de rotaţie a cos X cos W a cos Y sin W a(1 e) sin Z W Derivând parţial pe X, Y,Z în raport cu şi obţinem: W 1 e sin unde M şi N sunt razele de curbură principale, ale căror valori sunt date de expresiile: a(1 e) M (1 e sin ) 3/ a N E M ; F 0; G ( N cos ) 1/ (1 e sin )
61 Deci elementul de arc al curbei trasată pe suprafaţa elipsoidului de rotaţie este dat de expresia: ds M Pe paralel avem =const. şi d=0, deci elementul de arc de paralel (.3) are forma următoare: ds ds iar pe meridian =const., d=0 şi avem: ds ds p p m d r d m r rd M Md d d Dacă presupunem că suprafaţa Pământului este sferică, atunci meridianele vor fi cercuri mari şi vom avea, dacă notăm cu R raza sferei: M R r R cos ds R (.6 [ d (cosd ) ds p R cosd ds m Rd ]
62 UNGHIUL CURBELOR PARAMETRICE EG E Z Z Y Y X X EG ) ( 1 cos sin EG F H EG EG F EG H
63 UNGHIUL A DOUĂ CURBE TRASATE PE SUPRAFAŢA TERESTRĂ Vom însemna cu şi vom numi azimut, unghiul pe care-l face elementul de arc ds cu direcţiile pozitive a liniei de coordonate =const., în punctul M(,) (adică unghiul pe care-l face elementul ds în direcţia nord a meridianului). Cosinuşii directori ai elementului ds=mm 1 se obţin împărţind cu ds membrii ai doilea ai relaţiilor : dx dx dx d d d d dy dy X X 1 X Y Y Y Z Z 1 Z dy d d cos ( ) ( ) ( ) d d s E s s E dz dz dz d d d d
64 sau având în vedere expresiile: vom obţine: dx E ( ) d dx G ( ) d E d cos E s E ds F dx dx d d dy ( ) d dy ( ) d dy dy d d dz ( ) d dz ( ) d dz dz d d Ed Ed Eu F Eds ( Ed Fd) Eds E Eu Fu G Eds sin 1 cos
65 ELEMENTUL DE ARIE AL SUPRAFEŢEI TERESTRE
66 ELIPSA DEFORMAŢIILOR Prin elipsa de deformație se înțelege imaginea unui cerc infinit mic de pe suprafaţa elipsoidului sau a sferei în planul unui sistem de proiecţie cartografică, unde deformaţiile liniare depind şi de azimut. Se consideră pe elipsoidul de rotaţie o suprafaţa elementara ABCD, în care se înscrie un cerc cu raza ds = 1 (Figura 1), căreia în planul de proiecţie îi va corespunde patrulaterul A'B'C'D', iar cercului ii va corespunde o elipsa (Figura ). Figura 1. Cerc infinit mic pe suprafaţa elipsoidului (R=ds=1 ; R=OV=OT) Figura Elipsa de deformaţie în planul de proiecţie (a=o V ; b=o T )
67 Se observă că, prin proiecţia cercului infinit mic de pe elipsoid în planul de proiecţie, rezultă în general, o elipsa ale cărei semiaxe (a,b) indica direcţiile principale (I'-I) şi (n'-n') pe care se produc deformaţiile maxime şi, respectiv, deformaţiile minime. Direcţiile principale de pe suprafaţa elipsoidului (I-I) şi (II-II) şi din planul de proiecţie (I'-I') şi (n'-n') pe care se produc deformaţiile şi mărimea acestora sunt perpendiculare între ele. În unele cazuri axa mare coincide cu direcţia meridianului de longitudine λ, iar axa mica cu direcţia paralelului de latitudine φ sau invers, dar în general, aceste direcţii au o poziţie diferită (Figura ). Dacă suprafaţa elipsei de deformaţie este mai mare sau mai mică decât suprafaţa cercului de pe elipsoid rezultă că în urma reprezentării, suprafeţele s-au modificat în sens pozitiv sau în sens negativ, iar unghiurile au deformaţii în proiecţie. Dacă cercul de pe elipsoid se reprezintă tot prin cerc rezultă că, deformaţiile sunt uniforme pe cele doua direcţii principale, iar proiecţiile sunt conforme. Din punct de vedere practic, repartizarea deformaţiilor de pe o harta se poate analiza cu ajutorul unor tabele de deformaţii, ce se anexează la harta respectivă sau cu ajutorul izocolelor, ce se reprezintă sub forma unor cercuri concentrice sau a unor linii care unesc punctele egale ale deformaţiilor de pe o harta. Modulul într-un punct M(,) în general este funcţie de azimutul ; pentru diferite azimute 1,, vom avea diferiţi moduli 1,, în reprezentarea pe plan, în punctul M (x,y) azimutelor 1,, le vor corespunde unghiurile 1,,. Vom lua imaginea meridianului care trece prin M drept meridian axial. Ducem din punctul M (x,y) diferite direcţii care formează cu tangenta la imaginea meridianului axial, unghiurile 1,, măsurăm pe aceste direcţii, începând de la punctul M, diferite segmente egale cu valorile modulilor de deformare liniară corespunzători direcţiilor respective şi apoi unim extremităţile acestor segmente cu o linie curbă continuă. Vom demonstra că această curbă este o elipsă.
68 Determinarea elipsei deformaţiilor x cos y sin
69 ELEMENTELE UNUI SISTEM DE PROIECŢIE planul de proiecţie P este suprafaţa pe care se face proiectarea porţiunii de pe elipsoid. Planurile de proiecţie pot fi suprafeţele plane, tangente sau secante la suprafaţa de reprezentat, de pe glob, suprafeţe desfăşurabile sub formă de cilindru sau con; punctul central al proiecţiei C este punctul din centrul zonei de proiectat faţă de care se face proiecţia acestei zone. Acest punct poate fi materializat sau fictiv punctul de vedere 0 este punctul în care se consideră aşezat ochiul observatorului când priveşte zona de proiecţie; reţeaua geografică este reţeaua de meridiane şi paralele de pe globul terestru care se proiectează pe hartă; reţeaua cartografică este reţeaua de linii drepte sau curbe rezultate din proiecţia în plan a meridianelor şi paralelelor globului pământesc; reţeaua rectangulară este formată din drepte echidistante paralele cu sistemul de axe rectangulare plane Ox şi Oy. scara reprezentării
70 CLASIFICAREA PROIECŢIILOR CARTOGRAFICE
71 După caracterul deformaţiilor După suprafaţa pe care se face proiectarea După poziţia pe glob a centrului reţelei cartografice Dupa intersectia planului de proiectie După utilizarea proiecţiilor în construcţia hărţilor
72 CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ CARACTERUL DEFORMAŢIILOR 1. Proiecţii conforme sunt proiecţiile care păstrează nedeformate unghiurile. ^ ^ '
73 . Proiecţii echivalente sunt cele care păstrează nedeformate suprafeţele. 3. Proiecţii echidistante nu deformează distanţele.

74
75
76
77 CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ SUPRAFAŢA PE CARE SE FACE PROIECTAREA ŞI ASPECTUL REŢELEI CARTOGRAFICE proiecţii azimutale; proiecţii cilindrice; proiecţii conice; proiecţii pseudocilindrice; proiecţii pseudoconice; proiecţii policonice; proiecţii circulare.
78 Proiecţii azimutale proiectarea se face pe un plan, iar reţeaua cartografică poate avea paralelele sub formă de cercuri, iar meridianele sub formă de linii drepte Se folosesc mai ales pentru reprezentarea suprafeţei terestre pe emisfere (E, V, N, S) şi pentru reprezentarea unor teritorii cu aspect mai mult sau mai puţin circular.

79 Proiecţii azimutale şi aspectul reţelei normale in proiecţiile azimutale drepte
80 Proiecţii cilindrice proiectarea se face pe suprafaţa laterală a unui cilindru, care apoi se desfăşoară prin tăierea în lungul unei generatoare. Meridianele şi paralelele sunt linii drepte, paralele între ele şi perpendiculare unele pe celelalte.

81 Proiecţii cilindrice şi aspectul reţele normale în cazul proiecţiilor echidistante
82 Proiecţii conice proiectarea se face pe suprafaţa laterală a unui con. Paralelele sunt arce de cerc, iar meridianele linii drepte ce se întâlnesc într-un punct corespunzător cu vârful conului.

83 Proiecţii conice şi aspectul general al rețelei normale in proiecţiile conice drepte


84 Proiecţii poliedrice Proiecţii pseudocilindrice Proiecţii pseudoconice Proiecţii circulare Proiecţii derivate
85 CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ POZIŢIA PE GLOB A CENTRULUI REŢELEI CARTOGRAFICE 1. Proiecţii normale sau drepte sunt cele în care axa polilor, deci axa globului, coincide cu axa conului sau cilindrului, în cazul proiecţiilor conice şi cilindrice, iar în cazul proiecţiilor azimutale, planul de proiecţie este tangent în pol şi deci paralel cu planul ecuatorului.. Proiecţii transversale sau ecuatoriale sunt proiecţii în care axa cilindrului sau conului este perpendiculară pe axa polilor, iar în cazul proiecţiilor azimutale, planul de proiecţie este tangent la ecuator şi prin urmare este paralel sau se confundă cu planul meridianului. 3. Proiecţii oblice sunt acelea în care axa cilindrului sau conului face cu axa polilor un unghi mai mic decât un unghi drept, iar în cazul proiecţiilor azimutale, planul de proiecţie face un anumit unghi <90 0 cu axa polilor.
86 Proiecţii azimutale a) Proiecţii drepte b) Proiecţii oblice c) Proiecţii transversale
87 Proiecţii cilindrice a) Proiecţii drepte b) Proiecţii oblice c) Proiecţii transversale
88 Proiecţii conice a) Proiecţii drepte b) Proiecţii oblice c) Proiecţii transversale


89 CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ INTERSECŢIA PLANULUI DE PROIECŢIE CU GLOBUL Proiecţii tangente Proiecţii secante
90 CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ MODUL DE UTILIZARE LA ÎNTOCMIREA HĂRŢILOR proiecţii cartografice utilizate pentru întocmirea hărţilor universale: proiecţia AITOV-HAMMER; proiecţia GRINTEN; proiecţia MERCATOR; proiecţia MOLLWEIDE; proiecţia SANSON FLAMSTEED. proiecţii cartografice utilizate pentru întocmirea hărţilor emisferelor: proiecţia azimutală ecuatorială LAMBERT; proiecţia azimutală ecuatorială POSTEL proiecţia azimutală ecuatorială STEREOGRAFICA; proiecţia azimutală ecuatorială ORTOGRAFICA; proiecţia sferică sau globulară; proiecţia MOLLWEIDE. proiecţii cartografice utilizate pentru întocmirea hărţilor continentale: proiecţia azimutală orizontală LAMBERT; proiecţia azimutală ecuatorială LAMBERT; proiecţia azimutală orizontală POSTEL; proiecţia azimutală polară POSTEL; proiecţia SANSON FLAMSTEED; proiecţia pseudoconică echivalentă BONNE; proiecţia cilindrică transversală conformă GAUSS KRUGER.

91 PROIECŢII CILINDRICE DREPTE
92
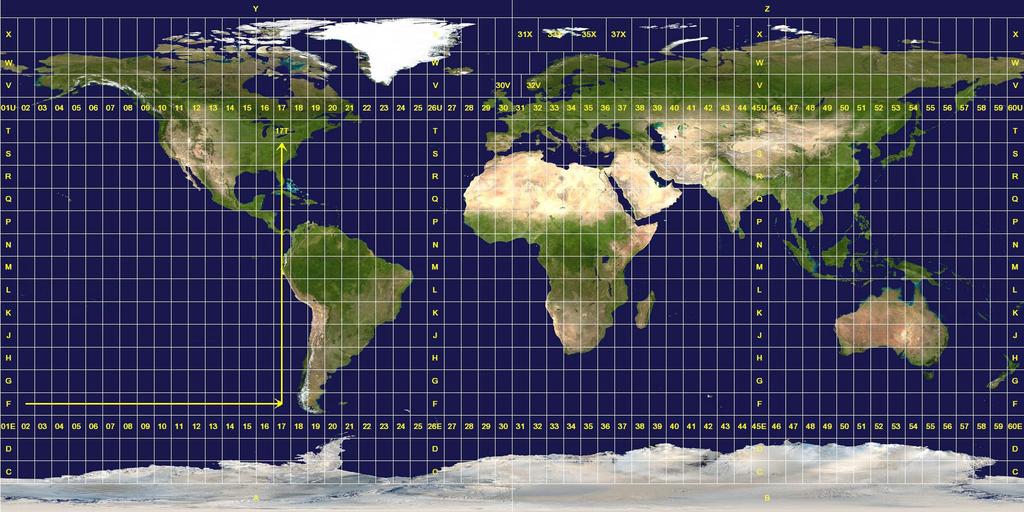
93 Ecuaţiile generale ale hărţii
94 Deformaţiile în cazul reprezentării elipsoidului de rotație Modulul de deformare liniară pe direcţia meridianului (m)
95 Modulul de deformare liniară pe direcţia paralelului (n)
96
97 Modulul de deformare areolara (p) Modulul de deformare unghiulara (ω)
98 Formulele generale ale proiecţiilor cilindrice drepte pentru reprezentarea elipsoidului: x f y, unde constant dx m ; n si p m n Md Ncos a b a sin sau tg 45 a b b Formulele generale ale proiecţiilor cilindrice drepte pentru reprezentarea sferei : x f y, unde constant dx m ; n si p m n Rd Rcos a b a sin sau tg 45 a b b
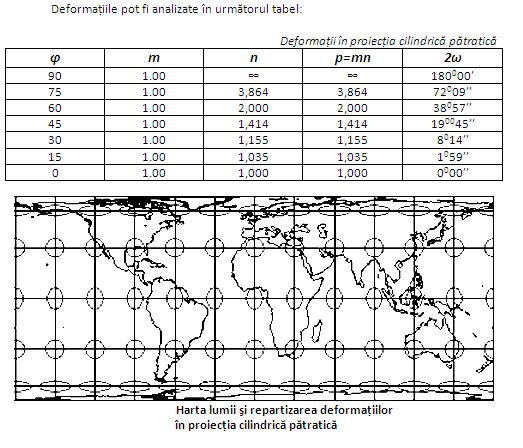
99 PROIECŢIA CILINDRICĂ DREAPTA CU REŢEAUA PĂTRATICĂ Proiecţia cilindrică dreaptă echidistantă pe meridiane (m = 1), cu reţeaua pătratică, în cazul cilindrului tangent la ecuatorul sferei terestre se calculează şi se construieşte grafic, pe baza următoarelor formule: x 100 s R cm y 100 s R cm 0 0 φ
100
101 PROIECŢIA CILINDRICĂ DREAPTĂ CU REŢEAUA DREPTUNGHIULARĂ
102
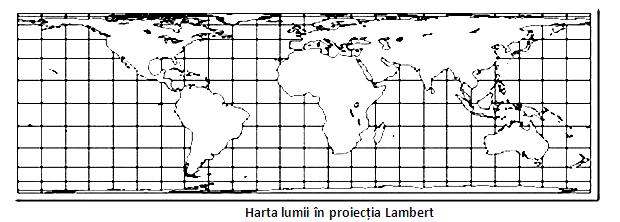
103 PROIECŢIA CILINDRICĂ DREAPTA ECHIVALENTA LAMBERT (P = 1), CU LATITUDINI DESCRESCANDE Proiecţia cilindrică dreapta echivalenta Lambert (p = 1), cu latitudini descrescânde, în cazul cilindrului tangent la ecuatorul sferei, denumita şi "izocilindrică", se calculează cu ecuaţiile: x 100 s R sin ycm 100 s0 R Deformaţiile proiecţiei se exprimă cu formulele : p mn 1 a n cm m cos b m 1 n tg 45 cos cos
104
105 PROIECŢIA CILINDRICĂ TRANSVERSALĂ GAUSS-KRÜGER
106 1. ISTORIC Acest sistem de proiecţie a fost conceput în anii de către celebrul matematician german Karl Friedrich Gauss ( ), iar mai târziu Johannes Krüger ( ), a elaborat, în anul 191, formulele necesare pentru trecerea coordonatelor punctelor de pe elipsoidul de rotaţie în planul de proiecţie. Astfel ca fost adoptata denumirea de "proiecţia Gauss - Krüger", precum şi "reprezentarea conformă Gauss", iar în practica curentă "proiecţia Gauss". În România, proiecţia Gauss a fost introdusa în anul 1951, când s-a adoptat şi elipsoidul de referinţă Krasovski Sistemul de proiecţie Gauss s-a folosit la întocmirea planului topografic de baza la scara 1:10.000, a hărţii topografice de baza la scara 1:5.000, precum şi a hărţilor unitare la diferite scări, pana în anul 1973.

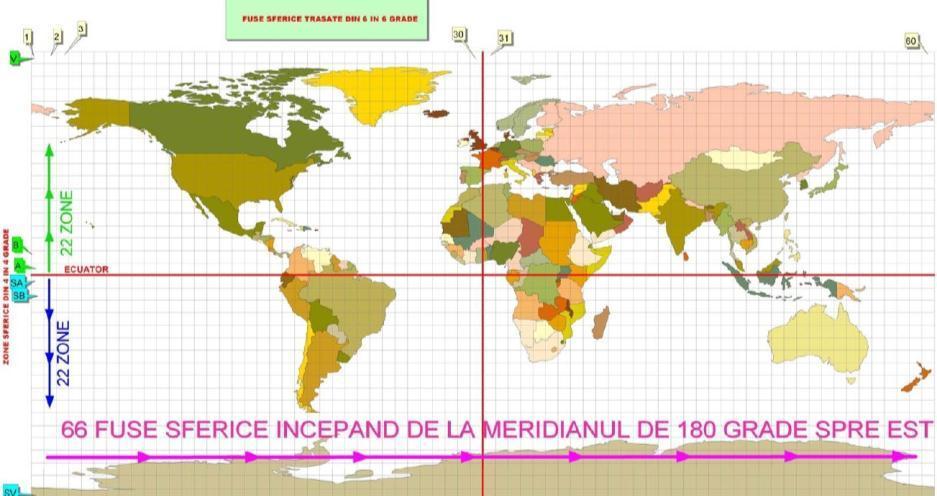
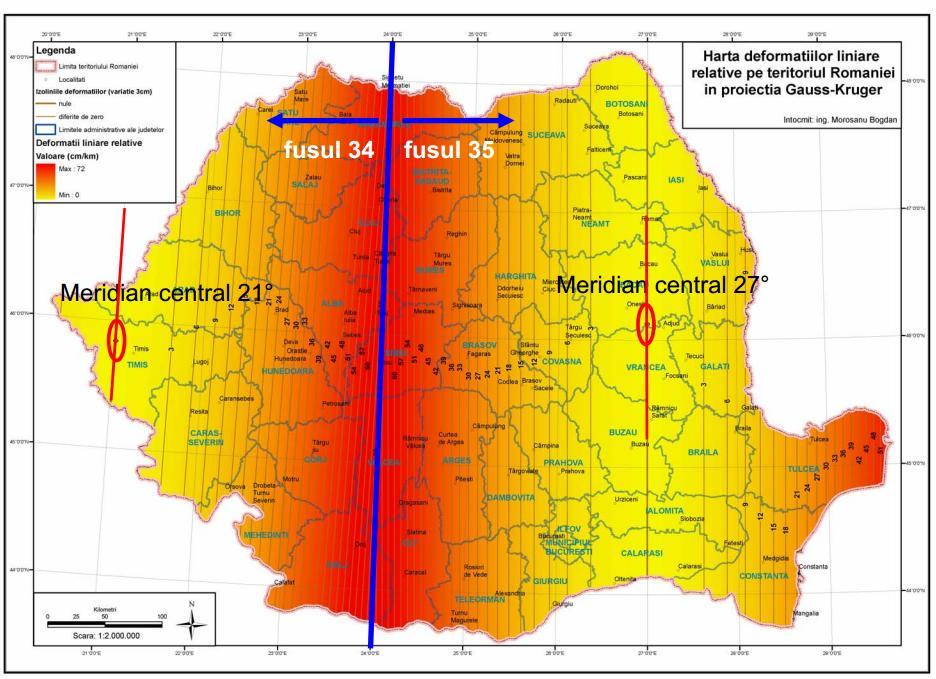
107 . CARACTERISTICI Proiecţia GAUSS KRUGER se caracterizează prin aceea că o anumită porţiune din suprafaţa terestră se reprezintă pe suprafaţa unui cilindru tangent şi transversal la suprafaţa de referinţă considerată sferică Pentru reprezentarea unitară a elipsoidului terestru în planul de proiecţie au fost stabilite meridianele de tangenţă pentru întregul Glob, rezultând un număr de 60 de fuse geografice de câte 6 longitudine, începând cu meridianul de origine Greenwich;
108 3. REŢEAUA CARTOGRAFICĂ Reţeaua cartografica în proiecţia Gauss este formata din imaginea plana a meridianului axial al fiecărui fus de 6 longitudine, a ecuatorului şi a celorlalte meridiane şi paralele ce se reprezintă după cum urmează: Meridianul axial al fusului de 6 longitudine se reprezintă în plan printr-o linie dreapta (NS), care constituie axa de simetrie a fusului şi totodată axa absciselor (XX'); Arcul de ecuator cuprins între meridianele marginale ale unui fus de 6 longitudine se reprezintă printrun segment de dreapta (WE), perpendicular pe proiecţia meridianului axial (NS), fiind considerat ca axa a ordonatelor (YY'); Meridianele se reprezintă prin linii curbe convergente la poli, având concavitatea îndreptată spre meridianul axial al fusului considerat, fiind simetrice faţă de imagine plana a acestuia (NS); Paralelele se reprezintă prin linii curbe cu concavitatea îndreptată spre polii geografici, fiind simetrice faţă de imaginea plana a ecuatorului (WE).
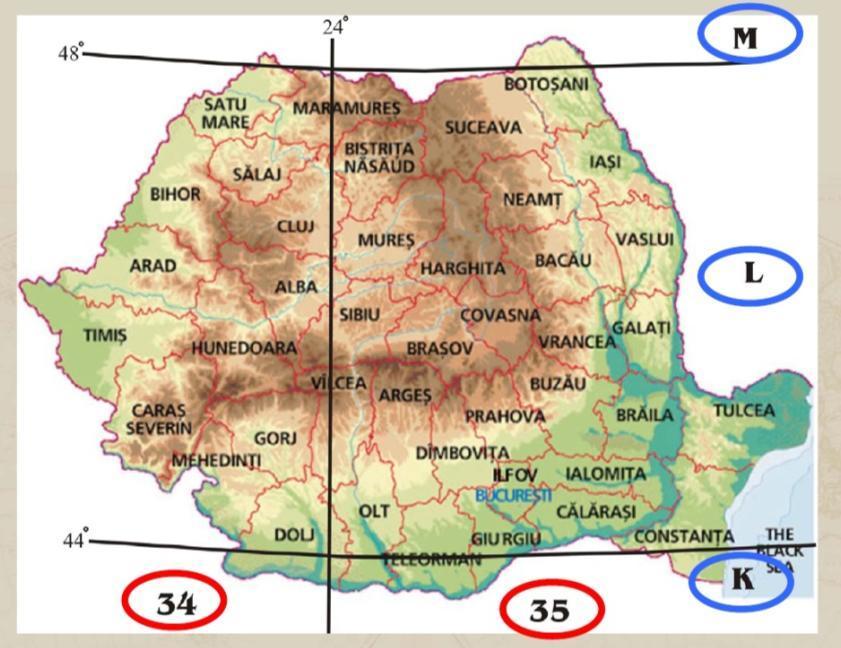
109 4. NUMEROTAREA FUSELOR Numerotarea fuselor de 6 se face cu cifre arabe, de la 1,,..., la 60, începând cu fusul 1 limitat de meridianele de 180 şi de -174 longitudine vestica. Numerotarea fuselor se continuă spre est până la fusul nr. 30 (cuprins intre -6 longitudine vestica şi 0 - meridianul Greenwich). Se continua numerotarea fuselor de 6 longitudine cu fusul 31 (cuprins intre meridianul Greenwich de 0 longitudine şi meridianul de 6 longitudine estica) şi până la fusul 60, limitat de meridianul de 174 longitudine estică şi de meridianul de 180. Teritoriul României se reprezintă cartografic în doua fuse de cate 6 longitudine cu numerele 34 şi 35 cu meridianele axiale de 1 şi 7 longitudine est Greenwich Prin trasarea de paralele la ecuator din 4 în 4 grade pe latitudine s-a realizat împartirea globului în zone(benzi) geografice care s-au numerotat cu literele A,B,C,,V, respectiv SA,SB.SV, începand de la ecuator pîna la paralelul de +80 o la nord şi respective -88 o la sud.

110
111 60
112
113
114 5. SISTEMUL ŞI ORIGINEA AXELOR În proiecţia Gauss, se consideră pentru fiecare fus de 6 longitudine un sistem propriu axe de coordonate rectangulare plane, a cărui origine O se găseşte la intersecţia meridianului axial, care reprezintă axa OX, cu Ecuatorul, ce reprezintă axa OY. Deci, pentru reprezentarea întregii suprafeţe a Globului terestru, se vor utiliza un număr de 60 sisteme de coordonate rectangulare plane. Coordonatele rectangulare plane ale unui punct oarecare P(x p,y p ) din emisfera nordica a Globului terestru, se vor exprima, în cazul absciselor X numai prin valori pozitive, care la latitudinea României sunt mai mari de 5000km. Valorile ordonatelor y, sunt pozitive sau negative, în funcţie de poziţia punctelor faţă de meridianul axial, care sunt situate în dreapta (ordonate pozitive) sau în stânga (ordonate negative). Pentru pozitivarea valorilor negative ale ordonatelor Y din stânga meridianului axial al unui fus de 6 longitudine, s-a efectuat translarea originii sistemului de axe cu +500 km spre vest. Deci, ordonatele tuturor punctelor se vor modifica prin adăugarea valorii de km, funcţie de coordonatele originii translate : O' ( X 0 = 0, 000 m şi Y 0 = , 000 m ). Deoarece este posibil ca din punct de vedere practic sa se obţină aceeaşi valoare a ordonatei Y pentru mai multe puncte, ce sunt situate în fuse diferite, s-a convenit sa se scrie în faţă valorii ordonatei Y şi numărul de ordine al fusului de 6. Cifrele (4) şi (5) înscrise în faţa ordonatei Y, semnifică numărul de ordine al fusului 34 şi 35. Spre exemplu, coordonatele plane Gauss ale unui punct din dreapta meridianului axial al fusului 35, au valorile :X p = ,19 m şi Y p = (5) , 08 m.
115
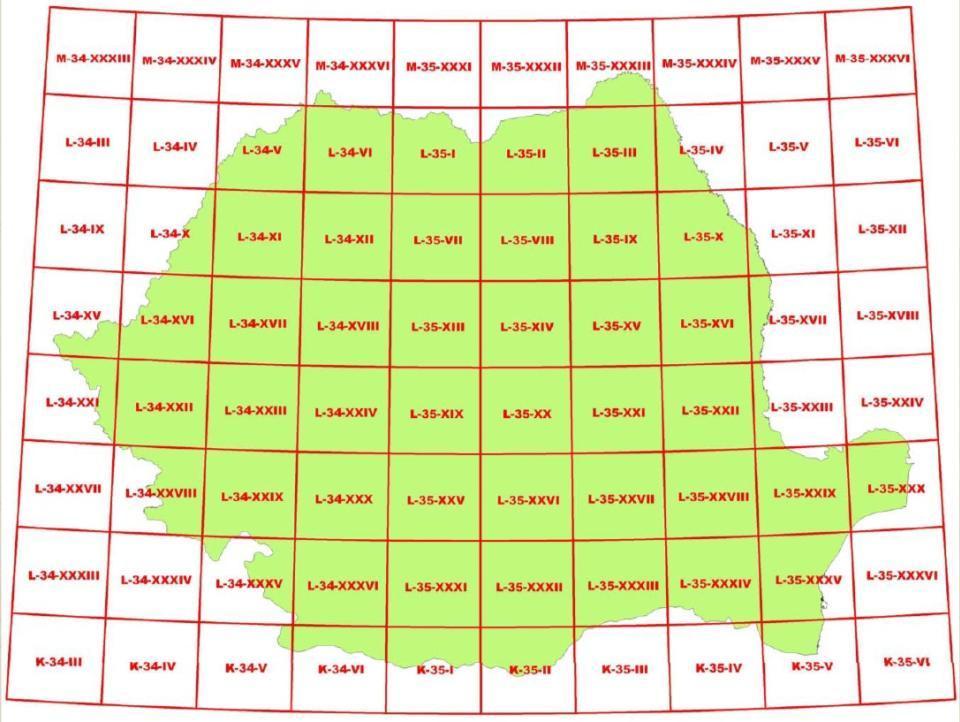
116 6. NOMENCLATURA HĂRŢILOR ÎN PROIECŢIA GAUSS - KRÜGER Definiţie: Prin sistem de nomenclatură se întelege sistemul de notaţie alcătuit din cifre şi litere, cu ajutorul căruia se defineşte pozitia unei foi de hartă în cuprinsul unui teritoriu sau a întregii suprafeţe terestre. La Congresul Internaţional de Geodezie şi Geofizică din anul 194 a fost propus şi adoptat un sistem internaţional de nomenclatură pentru harta lumii la scara 1: , sistem adoptat şi de România pentru hărţile în sistemul de proiecţie Gauss-Krüger. Acest sistem se utilizeaza şi în prezent la hărţile în proiecţie stereografică. Sistemul international de nomenclatură se bazează pe împărţirea globului terestru în zone sferice trasate din 4º în 4º de latitudine şi fuse sferice trasate din 6º în 6º de longitudine.
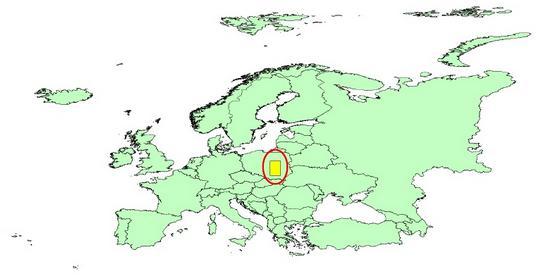
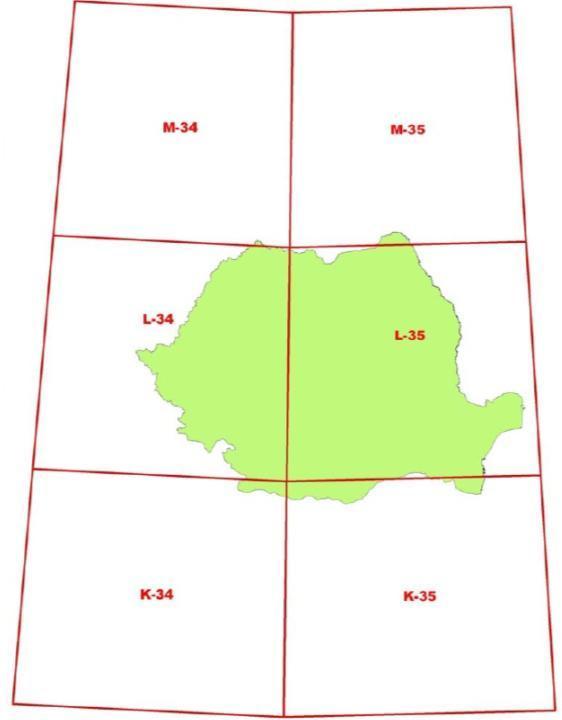
117 SCARA 1: φ= 4º λ= 6º NOMENCLATURA:L-34
118
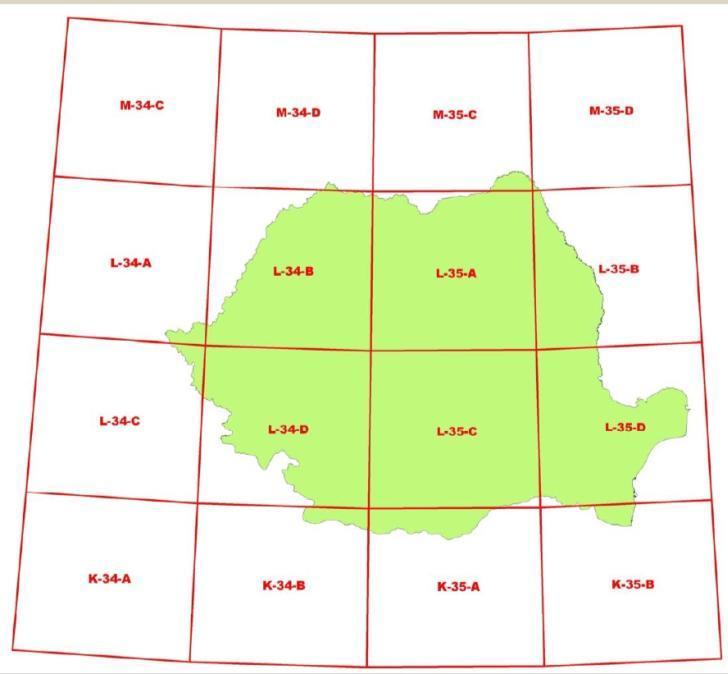
119 Pentru harta 1: s-a împărţit trapezul 1: în 4 părţi şi fiecare parte s-a notat prin primele 4 litere mari ale alfabetului: A, B, C, D. Deci, dimensiunile acestei foi vor fi 0 /3 0, iar nomenclatura uneia va fi de exemplu: L-34-D. φ= º λ= 3º NOMENCLATURA:L-34-D
120

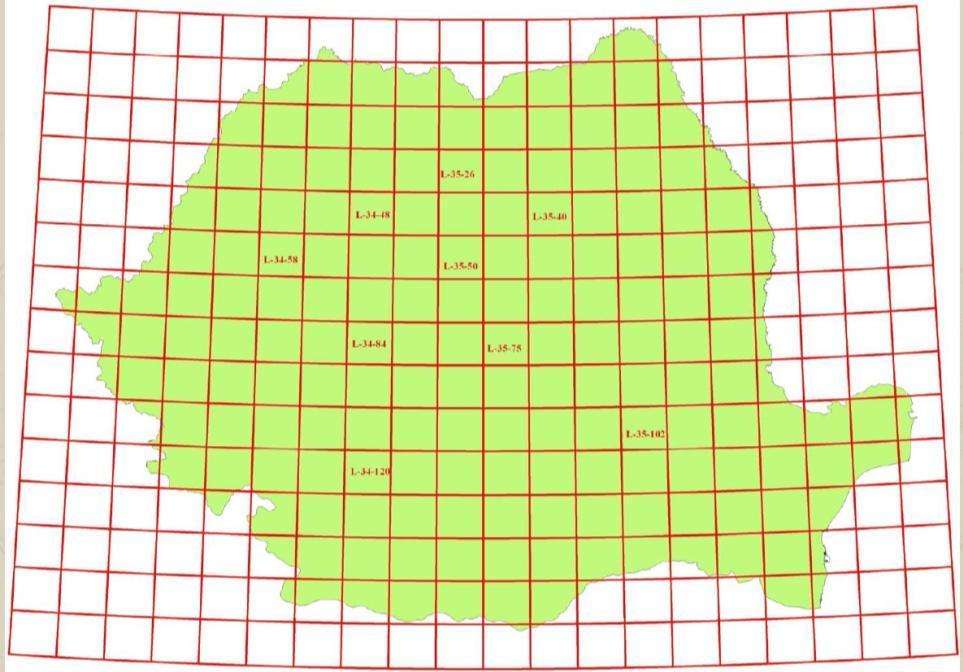
121 Pentru harta 1: s-a împărţit trapezul 1: în 36 părţi, notându-se fiecare parte în cifre romane de la I XXXVI. Dimensiunile acestei hărţi vor fi 40/1 0, iar nomenclatura L 34 XI. φ= 40 λ= 1º NOMENCLATURA: L-34-XXXVI
122

123 Pentru harta 1: s-a împărţit trapezul 1: în 144 părţi, deci fiecare latură a trapezului în 1 părţi. S-au obţinut astfel foile la 1: cu dimensiunile 0/30, iar pentru nomenclatură s-a stabilit a se numerota fiecare planşă cu cifre arabe de la 1 144, de exemplu L φ=0 λ= 30 NOMENCLATURA: L
124
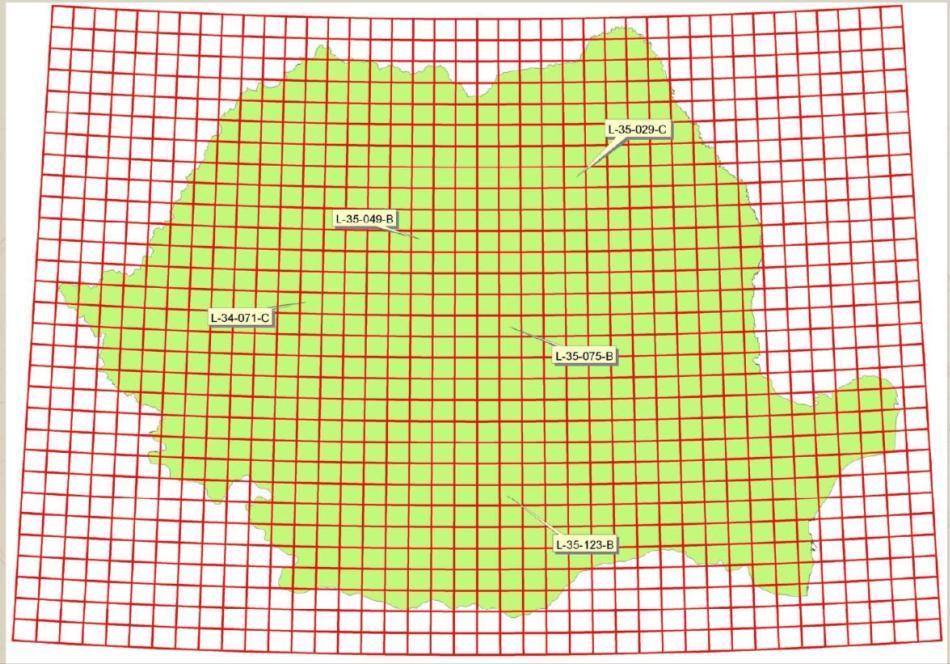
125 Pentru harta 1: s-a împărţit harta 1: în 4 părţi, notându-se aceste părţi cu primele 4 litere mari ale alfabetului. Exemplu: L 34 1 A, cu dimensiunile 10/15. φ=10 λ= 15 NOMENCLATURA: L-34-1-A
126

127 Pentru harta 1:5.000 s-a împărţit trapezul 1: în 4 părţi, notându-se acestea cu primele 4 litere mici ale alfabetului. Exemplu: L 34 1 A c, cu dimensiunile 5/730. φ=5 λ= 7 30 NOMENCLATURA: L-34-1-A-c

128 Pentru harta 1: s-a împărţit trapezul 1:5.000 în 4 părţi, notându-se prin primele 4 cifre arabe. De exemplu: L 34 1 A c 4, dimensiunile fiind 30/345. φ= 30 λ= 3 45 NOMENCLATURA: L-34-1-A-c-4
129 Pentru harta 1:5.000 se împarte trapezul 1: în 4 părţi. Fiecare trapez rezultat va avea dimensiunea 1 15 /1 5,5 notându-se cu cifre romane I,II,III şi IV. De exemplu L-34-1-A-c-4-IV Pentru harta 1:.000 fiecare trapez 1:5.000 se împarte în 4 trapeze notate cu cifre 1,,3,4. Dimensiunile sunt 5 /37,5. De exemplu L-34-1-A-c-4-IV-4
130 7. UNGHIULUI DE CONVERGENŢĂ AL MERIDIANULUI Unghiul de convergenţă al meridianelor într-un punct al proiecţiei este unghiul format de tangenta la meridianul punctului şi paralela la meridianul axial dusă prin punct. Convergenţa meridianelor poate fi exprimată în funcţie de coordonatele geografice sau în funcţie de coordonatele plane.
131 Valorile unghiurilor de convergenţă ale meridianelor în diferite puncte se pot găsi în tabele speciale, dar pe scurt, pot fi calculate şi cu ajutorul următoarei formule: sin În care: λ diferenţa de longitudine dintre longitudinea punctului şi a meridianului axial al fusului respectiv; latitudinea punctului dat.

132 Importanţa deosebită a unghiului de convergenţă al meridianelor constă în aceea că serveşte la determinarea unghiului ce trebuie să existe între liniile verticale de caroiaj şi nordul magnetic; Considerăm două trapeze, unul situat în dreapta meridianului axial, iar celălalt în stânga meridianului axial. În figură s a notat: OO 1 meridianului axial al fusului; OM meridianul mediu al trapezului -paralela la meridianul axial(caroiajul rectangular al trapezului); - δ - unghiul de declinaţie magnetica
133 Unghiul de declinaţie magnetică se determină pentru fiecare trapez şi anume în punctul ce reprezintă centrul acestuia. Daca figurăm pentru cazul trapezului din dreapta meridianului axial (a) cele trei direcţii(direcţia caroiajului, direcţia nordului magnetic şi direcţia meridianului geografic), se poate scrie simplu că: Δ este unghiul dintre liniile verticale de caroiaj şi nordul magnetic. Acelaşi lucru pentru cazul trapezului situat în stânga meridianului axial (b) cu deosebirea că aici:
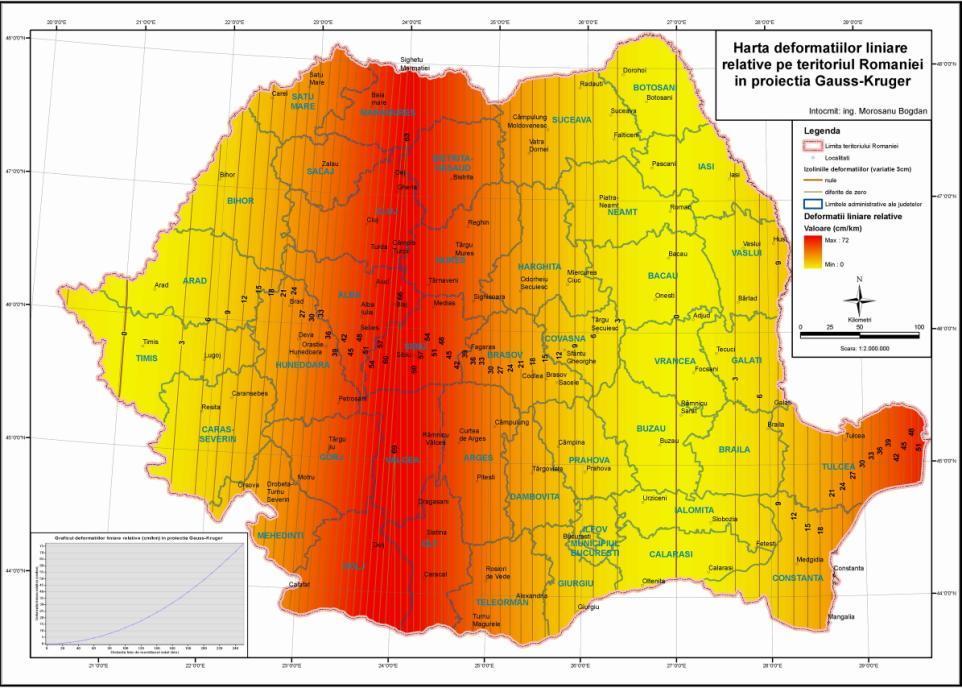
134 8. DEFORMAŢII ÎN PROIECŢIA GAUSS KRUGER modulul de deformare liniară se exprimă prin raportul dintre mărimea elementelor omologe, din planul de proiecţie şi de pe suprafaţa terestră ds y 1 [ cm / km] ds R m In proiecţia Gauss deformaţiile liniare relative sunt pozitive şi direct proporţionale cu distanţa faţa de meridianul axial.
135 Calculul deformaţiilor lungimilor, în funcţie de coordonatele geografice Se considera modulul de deformare liniară în cazul general al reprezentării unui element de distanta de pe elipsoid (ds) în planul proiecţiei (ds), de forma : m ds ds ds dx dy ds M d N cos d 1 l 1 l m cos 5 4 t cos '' ''4 4 '' ''4 4 Deformaţia relativă a lungimilor se poate calcula cu expresia : '' '' l l km '' '' D 1 m cos sau D 1 cos km
136 Calculul deformaţiilor lungimilor, în funcţie de coordonatele rectangulare Dacă se exprimă coordonatele geografice (φ,λ) din relaţia (4.64) prin coordonatele Gauss (x,y), rezultă o altă formulă de calcul a modulului 4 de deformare liniară (m): y y m 1 R 4R 4 Deformaţia liniară relativă se obţine cu relaţia : D m1 4 4 y y km 4 R R km
 şi (y=0), se considera punctele : 1,,...,7 situate pe paralelul cu latitudinea φ = 46")
137 Pentru exemplificarea modului de variaţie a deformaţiilor liniare relative (D m/km), în funcţie de depărtarea (y=d) faţă de meridianul axial (1=0) şi (y=0), se considera punctele : 1,,...,7 situate pe paralelul cu latitudinea φ = 46
138 Calculul deformaţiilor areolare Modulul de deformare areolara (p) din proiecţia Gauss, se determină pe principiul reprezentării conforme, pornindu-se de la formula generala : 4 p=m n sin i m=n sin i sin 90 1 p m y y y p 1 1 R R 4R Deformaţiile areolare sunt nule pe meridianul axial, După care cresc, pe măsura depărtării faţă de meridianul axial. Ariile trapezelor de lângă meridianul axial sunt egale cu cele de pe elipsoid, fiind considerate suprafeţe de control în lucrările de cadastru general. p m 4 1 y R

139 Pe harta lumii la sc. 1: , teritoriul tarii noastre este acoperit de fusul 34 la vest de meridianul de 4 o long. estica si fusul 35 la est de acelasi meridian. Meridianele axiale ale celor fuse au long. estica de 1 o si respectiv 7 o si reprezinta meridianele de deformare zero. Rezulta ca cele mai mari deformaţii vor apare între meridianele de 3 o - 5 o si 9 o - 30 o long. estica. ZONE CU DEFORMŢII MAXIME
140
141
142 CALCULUL COORDONATELOR PLANE GAUSS ÎN FUNCŢIE DE COORDONATELE GEOGRAFICE PRIN METODA FUNCŢIILOR ANALITICE x y f f 1 (, ) (, ) Considerăm două puncte infinit vecine P 1 şi P pe suprafaţa de referinţă şi corespunzătoare acestora în planul de proiecţie. Coordonatele punctului P 1 sunt α şi λ, iar coordonatele lui P, d şi d Fie OE, ecuatorul elipsoidului şi OP meridianul axial al zonei de reprezentat, (meridianul axial fiind şi meridianul original).
143 Pe planul de proiecţie aceste două linii curbe ale suprafeţei se reprezintă prin două linii drepte perpendiculare între ele şi formează axele de coordonate. Notăm aceste axe prin O'X- axa absciselor şi O'Y axa ordonatelor. Distanţa elementară între punctele P 1 şi P o Notăm cu ds, iar corespunzătoare acesteia în planul de proiecţie, deci distanţa între punctele cu ds. Examinând figura se observa că triunghiul P 1 P P 3 este un triunghi dreptunghic cu : ds P P 1 P P P P Raportul notat cu se numeşte modul de deformare liniara şi se exprima astfel : ds ds ds dx dy ds Înlocuind expresiile elementelor liniare obţinem : ( Md) ( N cosd) ds Md ( N cos) d ( Md) ( N cosd) dx dy Md ( Ncos ) ( ) N cos d Md dx dy N N dq d dq cos ( cos ) ( )
144 Se ştie din teoria funcţiilor de variabilă complexă că raportul : d( X iy) d( x iy) nu este funcţie de dx dy atunci când este o funcţie analitică de variabilă complexă ( x iy) adică când există o legătură de forma : X iy f ( x iy) Scriem expresia pătratului modulului de deformare liniară sub forma complexă : N N cos conform cu proprietatea enunţată a funcţiilor analitice trebuie ca : ( dx cos d( x idy)( dx ( dq d( q idy) id)( dq iy) d( x iy) i) d( q id) i) x iy f ( q i) x iy f ( q i) Aşadar, proiecţia este conformă atunci când este îndeplinită condiţia x iy f ( q i) idx i d X i d X 3 1 d X 4 i d X 5 x iy X ) ! dq! dq 3! dq 4! dq 5! dq
145 CALCULUL COORDONATELOR GEOGRAFICE ÎN FUNCŢIE DE COORDONATELE PLANE GAUSS PRIN METODA FUNCŢIILOR ANALITICE ) (5 4 `` `` t t t N M y t N M y
146 Transformarea coordonatelor geografice în coordonate rectangulare plane Gauss prin metoda coeficienţilor constanţi Se cunosc: φ 0 = longitudinea meridianului axial al fusului în care se reprezintă punctul; φ,λ= coordonatele geografice ale punctului, elipsoidul Krasovski Toate coordonatele geografice sunt în gradaţie sexagesimală. Formulele de calcul cu coeficienţi constanţi sunt: o ( )" 10 ( )" 10 x f l X x x l f a l f a l f a l f a l f a l f a l f a l f a l f a l f a l f a l f a l f a l f a x l f b l f b l f b l f b l f b l f b l f b l f b l f b l f b l f b l f b l f b y ) ( ) ( ) ( l f a f a f a f a l f a f a f a f a f a l f a f a f a f a f a x ) ( ) ( ) ( l f b f b f b l f b f b f b f b f b l f b f b f b f b f b y x S S l S l R R R y S l S l S l R R R
147 Şablonul de calcul este următorul:
148 Transformarea coordonatelor rectangulare plane Gauss în coordonate geografice prin metoda coeficienților constanţi Se cunosc coordonatele rectangulare Gauss ale unui punct oarecare A şi longitudinea meridianului axial al fusului (λ 0 ). Se cere să se calculeze coordonatele geografice (φ, λ) ale punctului corespunzător pe suprafaţa elipsoidului de referinţă. Formulele de calcul cu coeficienţi constanţi utilizate pentru această transformare sunt: x X x x Y 0 l unde l este diferenţa de longitudine a punctului, faţă de meridianul axial. o y ( A A x A x A x A x A x ) ( A A x A x A x A x A x ) Y ( A A x A x A x ) Y ( A x A x) Y l ( B B x B 11 B x B 33 x x B 43 B x 4 31 x ) Y 3 3 B ( B x 4 B B x x B 5 5 B x 61 x B 6 35 ) Y x 3 ( B ) Y 5 03 B ( B x x 0 ) Y 7 " S S Y S Y S Y R" R" R" R" l" S Y S Y S Y S Y R" R" R" R"
149 Şablonul de calcul este următorul:
150 CALCULUL COORDONATELOR PLANE GAUSS PRIN METODA REDUCERII LA COARDĂ Să presupunem că pe elipsoid în punctul P 1 s au măsurat: azimutul T 1 şi distanţa s 1. Având cunoscute coordonatele Gauss Krüger ale punctului P 1, ne propunem să determinam coordonatele punctului P. Din figură se vede că pentru a determina pe x şi y ne sunt necesare elementele S 1 şi t 1. S 1 s 1 1 y 1 y 1 6R y m y

151 PROIECŢIA UTM Această proiecţie este o variantă particulara a proiecţiei Gauss - Krüger, utilizată în Statele Unite ale Americii şi în alte ţări, având o importanţă deosebită în ultimul timp şi pentru România datorită integrării în noile structuri politice şi militare. În sistemul UTM (Universal Transversal Mercator) proiecţia suprafeţei Pământului se face pe un cilindru a cărui axă este perpendiculară pe axa polilor. Pentru reprezentarea în această proiecţie, elipsoidul se împarte în zone (fuse)şi benzi. Pe longitudine, elipsoidul este împărţit în 60 de zone, delimitate demeridiane marginale a căror longitudini sunt multiplu de 60. Zonele astfel rezultate sunt numerotate consecutiv de la 1 (delimitat de meridianele marginale 180 o şi 174 o longitudine vestică) până la 60 (delimitat de meridianele marginale 174 o şi 180 o longitudine estică), spre est Pentru a evita coordonatelor false, şi anume folosirea coordonatelor negative, s-a introdus utilizarea : N ' m N( emisfera sudica) N ' N( emisfera nordica) E ' m E
152

153 Elipsoidul de referință adoptat pentru reprezentarea suprafeței Pământului în planul proiecției este elipsoidul internațional WGS 84
154

155

156 Împartirea Europei pe zone de proiectie U.T.M.
157

158 Nr. punct x y
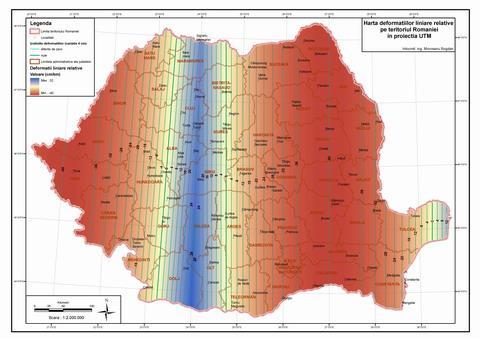
159 România se află parţial în fusul 34 (18-4 ) şi parţial în 35 (4-30 ).
160 Sistemul U.T.M. se pretează la întreg globul terestru având avantajul ca reduce erorile de reprezentare în plan datorita introducerii unui factor de scara, care face ca deformările liniare de la marginea fusului proiectat în plan sa se reducă la jumătate. Adoptându-se sistemul de reprezentare pe fuse de 6 longitudine, reprezentarea în plan este destul de fidela. Un dezavantaj al reprezentării pe fuse duce la o îngreunare a calculelor în zona de vecinătate a fusului, dar acest lucru se poate îmbunătăţi cu ajutorul tehnicii modeme de calcul.
161 DEFORMAŢII ÎN PROIECŢIA UTM Proiecţia UTM este conformă, deci unghiurile nu se deformează la reprezentarea în planul de proiecţie. Deformaţiile liniare se studiază cu ajutorul modulului de deformaţie liniară: UTM ds k cm / km] 0 GAUSS ds
162
163
164
165
166 PROIECŢIA CILINDRICĂ DREAPTĂ CONFORMĂ MERCATOR (CU LATITUDINI CRESCÂNDE) A fost studiată şi aplicată în anul 1569 de către cartograful olandez Gerard Kremer Mercator, unul din principalii fondatori ai geografiei matematice. Proiecţia studiată de el se mai numeşte şi proiecţia mercatoriană. Proiecţia Mercator este o proiecţie conformă Această proiecţie presupune reprezentarea globului pe suprafaţa desfăşurată a unui cilindru a cărui axă coincide cu axa de rotaţie a Pământului şi tangent de-a lungul ecuatorului.

167 Pe direcţia paralelelor nu avem deformări Pe direcţia meridianelor deformările se prezinta sub forma unor alungiri un cerc de pe sferă se va reprezenta pe proiecţie tot printr-un cerc rezultă că elipsele deformărilor vor fi cercuri, însă de suprafaţă diferită
168


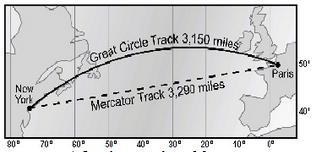
169 Importanţa hărţilor în proiecţia MERCATOR Pe o hartă în proiecţia Mercator, linia dreaptă AB reprezintă loxodroma (LINIA CARE TAIE TOATE MERIDIANELE SUB ACELAŞI UNGHI), iar linia curbă AB ortodroma (adică distanţa cea mai scurtă dintre puncte de pe glob).
170
171 Hărţile în această proiecţie au o mare importanţă în navigaţia maritimă şi aeriană, deoarece proiecţia fiind conformă, iar reţeaua cartografică formată din linii perpendiculare, loxodroma va fi o linie dreaptă. Această linie face cu fiecare din proiecţiile meridianelor acelaşi azimut. Această caracteristică importantă a hărţilor în proiecţia Mercator, constituie un mare avantaj pentru conducerea vaselor şi avioanelor în ceea ce priveşte comoditatea orientării lor pe parcurs. Mergând de la A spre B şi folosind o hartă în proiecţia Mercator, direcţia de înaintare să facă cu proiecţia meridianelor acelaşi unghi. Pentru aceasta el va trebui să meargă după loxodroma AB care pe harta mercatoriană se proiectează după linia dreaptă AB, dar care, pe glob, are un traseu ocolit, deci este mult mai mare ca linia dreaptă ortodroma, linia cea mai scurtă ce uneşte puncte de pe glob şi care este un arc al cercului mare ce trece prin aceste puncte ortodromă care în proiecţia Mercator se reprezintă printr-o linie curbă AB. De exemplu: distanţa Moscova San Francisco după ortodromă arcul cercului mare ce trece prin aceste localităţi este de 9476 km, iar loxodroma în proiecţia Mercator, deşi se reprezintă în aceste hărţi printr-o linie dreaptă, are o lungime de km, deci cu 575 km mai lungă decât ortodroma.

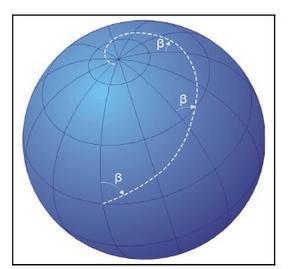
172 Loxodroma. Stabilirea ecuaţiei loxodromei Se consideră pe glob distanţa AB, punctele A şi B fiind situate pe meridiane şi paralele diferite C A B 1 = 1+d
173 C A B B(x, y ) 1 = 1+d A(x 1, y 1 ) Considerăm în planul de proiecţie loxodroma cuprinsă între punctele de coordonate A(x 1, y 1 ) şi B(x, y ); din triunghiul ABC, rezultă: tg tg BC ' ' AC ' ' y y1 1 x x D D 1 1
174
175 Calculul şi construcţia reţelei cartografice Pe direcţia meridianelor nu avem deformări, deoarece: mb1 v b Pe direcţia paralelelor deformările se prezentau sub forma unor alungiri, deoarece: nasec 1sec v a11
176 Aspectul reţelei cartografice în proiecţia Mercator derivă din cel al proiecţiei cilindrice pătrate, ţinând însă seama că proiecţia Mercator este o proiecţie conformă şi că această condiţie cere ca în orice punct al proiecţiei elipsa deformărilor să devină un cerc, deci ca: m n r Deformaţii în proiecţia Mercator Deformaţiile liniare v v C 1 sec 1 Deformaţiile direcţiilor şi unghiurilor sin a a b b 0 a 0 Rezultă că proiecţia Mercator este o proiecţie conformă, întrucât atât direcţiile, cât şi unghiurile nu sunt deformate şi, ca atare, un cerc de pe sferă se va reprezenta pe proiecţie tot printr-un cerc rezultă că elipsele deformărilor vor fi cercuri, însă de suprafaţă diferită.
177
178
179 PROIECŢII AZIMUTALE
180 CLASIFICAREA PROIECŢIILOR AZIMUTALE După poziția planului de proiecție faţă de sfera terestră dată de valoarea latitudinii 0 a polului proiecţiei Q 0 ( 0,λ 0 ) se disting: Proiecţii azimutale drepte (normale sau polare) pentru latitudinea = 90 0 ; Proiecţii azimutale oblice pentru latitudinea Proiecţii azimutale transversale pentru latitudinea = 0 0 După caracterul deformaţiilor, proiecţiile azimutale se împart în trei grupe: Proiecţii azimutale conforme (w = 0); Proiecţii azimutale echivalente (p = 1); Proiecţii azimutale echidistante pe anumite direcţii (m = 1). După modul de proiectare pe o suprafaţă plană, proiecţiile azimutale au fost împărţite în următoarele doua categorii: Proiecţii azimutale neperspective, ce se obţin în urma unor proiectări teoretice a suprafeţei Pământului pe o suprafaţă plană, unde se consideră condiţiile de reprezentare pe care trebuie sa Ie îndeplinească un sistem de proiecţie: conformitate, echivalenţă sau echidistanţă pe ambele direcţii, fiind impuse de modul de construcţie al reţelei cartografice şi de mărimea deformaţiilor. Proiecţii azimutale perspective, la care proiectarea suprafeţei Pământului pe un plan de proiecţie se face printr-o proiectare propriu-zisă, pe baza utilizării legilor perspectivei liniare, unde punctul de vedere este situat pe unul din diametrele sferei sau pe prelungirea acestuia, iar planul de proiecţie este perpendicular pe diametrul sferei terestre.
181 În funcţie de poziţia punctului de vedere, proiecţiile azimutale perspective pot fi împărţite în: ortografice, când punctul de perspectivă se consideră la infinit, iar razele proiectoare sunt paralele şi perpendiculare pe planul de proiecţie; sunt proiecţii afilactice, păstrând nedeformate distanţele pe anumite direcţii şi sunt folosite pentru realizarea de mapamonduri; stereografice, în situaţia în care razele proiectoare pornesc dintr-un punct diametral opus celui de tangenţă; sunt proiecţii conforme, deformează foarte mult suprafeţele şi formele şi se utilizează pentru hărţii ale regiunilor polare sau pentru mapamonduri; centrale, când razele proiectoare pornesc din centrul sferei; sunt proiecţii afilactice, deformează foarte mult distanţele spre exterior, ajungând la infinit pe margini şi sunt folosite pentru hărţi ale navigaţiei, având în vedere că ortodroma se reprezintă printr-o linie dreaptă; exterioare, dacă razele proiectoare pornesc dintr-un punct exterior Terrei, la o distanţă mai mare decât diametrul acesteia şi mai mică de infinit, opus planului de proiecţie; sunt afilactice, dar cu deformaţii mai mici decât proiecţiile ortografice şi stereografice.
182 PROIECŢII AZIMUTALE DREPTE În cazul proiecţiilor azimutale, suprafaţa terestră sau o porţiune din această suprafaţă se reprezintă în planul de proiecţie, după anumite condiţii ale reprezentării pentru proiecţiile neperspective şi după legile perspectivei liniare pentru cele perspective.
183 ASPECTUL GENERAL AL REŢELEI NORMALE Meridianele se reprezintă prin drepte convergente într-un punct, care este imaginea plană a polului geografic (P N ), ce se intersectează sub unghiuri egale cu diferenţele de longitudine dintre meridianele considerate: 1... Paralelele se reprezintă prin cercuri concentrice cu centrul comun în punctul de intersecţie a dreptelor care reprezintă meridianele, fiind echidistante sau neechidistante, funcţie de condiţiile de baza ce se impun proiecţiilor azimutale.
184 SISTEMUL DE AXE DE COORDONATE PLANE POLARE ŞI RECTANGULARE Poziţia punctelor din planul proiecţiilor azimutale se determina atât prin coordonate plane polare (d,r), cât şi prin coordonate plane rectangulare (x, y), în cazul sistemului de axe de coordonate plane. în sistemul de coordonate plane polare al proiecţiilor azimutale drepte se consideră că axa polară una din dreptele care reprezintă imaginea plană a meridianului de origine sau a celui opus, iar ca pol se ia imaginea plană a polului geografic (a). în sistemul de coordonate plane polare al proiecţiilor azimutale oblice sau transversale se ia ca axa polară dreapta care reprezintă imaginea plană a meridianului de longitudine λ 0 al polului Q 0 ( 0,λ 0 ),a cărui imagine plană reprezintă originea sistemului de coordonate plane. Sistemul de axe de coordonate plane rectangulare se stabilește cu originea în polul sistemului de coordonate polare, cu axa XX' în coincidenta cu axa polara. (b).
185 FORMULELE DE CALCUL ALE COORDONATELOR PLANE POLARE ŞI RECTANGULARE x cos F( ) y sin
186 FORMULELE DE CALCUL ALE MODULILOR DE DEFORMARE A(, ); B( d, ); C(, d) r O A O C 1 1 AB ds Rd m AC ds rd p OA' OB ' d A' B ' ds d m A' C ' ds d p
187 modulul de deformare liniara pe meridiane (m): unde semnul minus de la numărător (-dr) este stabilit de faptul că, pe măsura creşterii latitudinii φ, raza vectoare (r) se micşorează. modulul de deformare liniară pe paralele (n): unde : m n ' ' dsm A B d d m ds AB Rd Rd m ' ' ds p AC d ds AC rd p în cazul proiecţiilor azimutale drepte. dδ dλ r Rcos n Rcos modulul de deformare areolara (p): p mnsini mnsin90 p mn
188 Formulele generale ale proiecţiilor azimutale drepte pentru reprezentarea sferei terestre de raza R Formulele generate ale proiecţiilor azimutale drepte, pentru reprezentarea elipsoidului de rotatie terestru Ψ f d d m Rd Rd n r Rcos 45 4 x cos y sin p m n a b sin a b a tg b Ψ f d d m Md Md n r Ncos 45 4 x cos y sin p m n a b sin a b a tg b
189 PROIECŢII AZIMUTALE OBLICE ŞI TRANSVERSALE În cazul proiecţiilor oblice, care reprezintă cazul general al proiecţiilor azimutale se efectuează următoarele operaţii de calcul: Suprafaţă elipsoidului de rotaţie se reprezintă pe suprafaţă unei sfere; Coordonatele geografice de pe sfera terestră de rază R(φ,λ) se transformă în coordonate sferice polare (A, Z); Se determină coordonatele plane polare (d,r), în funcţie de coordonatele sferice polare (A, Z); Se determina coordonatele plane rectangulare (x, y) în funcţie de coordonatele plane polare(d,r); Se determina modulii de deformare (m, n, p) şi deformaţia unghiulara maxima (w).
190 FORMULELE GENERALE ALE PROIECŢIILOR AZIMUTALE OBLICE ŞI ALE CELOR TRANSVERSALE Formulele generale ale proiecţiilor azimutale oblice şi ale celor transversale, se obţin în cazul reprezentării sferei terestre de raza R din formulele proiecţiilor azimutale drepte, în care se efectuează următoarele înlocuiri: longitudinea λ cu azimutul (A); latitudinea φ cu diferenţa (90 -Z); colatitudinea Ψ cu distanta zenitala (Z); modulul de deformare liniară pe meridiane (m) cu modulul deformare liniară pe verticaluri µ 1 modulul de deformare liniară pe paralele (n) cu modulul de deformare liniară pe almucantarate µ A 90 f Z F Z d 1 RdZ Rsinz p sin x cos y sin sin a b a b tg 45 4 a b
191 PROIECŢII AZIMUTALE NEPERSPECTIVE În proiecţiile azimutale neperspective, ecuaţiile proiecţiilor şi reţeaua cartografică se determină pe baza condiţiilor de confor mitate, echivalenţă sau echidistanţare. În cazul proiecţiilor azimutale neperspective drepte sau polare,, meridianele sunt drepte convergente într-un punct ce reprezintă chiar imaginea polului geografic, intersectându-se sub unghiuri egale cu diferenţa longitudinilor meridianelor corespunzătoare. Paralelele se reprezintă prin cercuri concentrice având centrul comun în punctul de convergenţă al meridianelor şi pot fi echidistanţate sau neechidistanţate în funcţie de condiţiile ce se impun proiecţiei Reţeaua cartografică de meridiane şi paralele constituie reţeaua principală a proiecţiei, spre deosebire de reţeaua normală care corespunde celei mai simple reprezentări într-o proiecţie dată a reţelei de linii de coordonate, proprie unui sistem deter minat de coordonate.
192
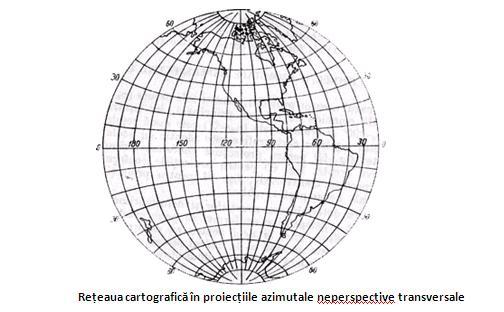
193
194
195 formule generale ale proiecţiilor azimutale neperspective drepte formule generale ale proiecţiilor azimutale neperspective oblice şi transversale a f( z) x cos y sin d 1 Rdz Rsin z p x y f ( ) cos sin m n sin tg d Rd R cos 1 a b a b 4 0 (45 ) p sin tg mn a a 4 b b 0 (45 ) a b a b
196 PROIECŢII AZIMUTALE PERSPECTIVE În cazul proiecţiilor azimutale perspective se consideră următoarele principii caracteristice ale reprezentării punctelor de pe sfera, în planul de proiecţie Pământul se considera sfera de raza R; Planul de proiecţie, pe care se face reprezentarea cartografică mai poartă denumirea şi de planul tabloului (T); Polul proiecţiei Q 0 ( 0,λ 0 ) se alege aproximativ în mijlocul teritoriului de reprezentat, care în cazul României este punctul Q 0 ( 0 = 46 00'00" şi λ 0 = ); Diametrul QQ 0 al sferei de raza R poarta denumirea de diametru principal, iar pe lungimea sau pe prelungirea lui se alege un punct de vedere (V); Distanţa dintre punctul de vedere (V) şi centrul sferei de raza R se notează cu D, iar distanţa dintre punctul de vedere (V) faţă de planul de proiecţie (T) se notează cu K, cu menţiunea ca planul T este perpendicular pe diametrul principal QQ 0 ; Dreptele care pornesc din punctul de vedere (V) şi trece prin diferite puncte de pe suprafaţa sferei terestre poarta denumirea de drepte proiectante (VB); Punctul B de coordonate geografice şi λ de pe sfera se proiectează în punctul B' de coordonate plane polare d şi r sau de coordonate plane rectangulare x şi y, pe planul tabloului (T), în care dreapta proiectanta VB ce trece prin B înţeapă planul de proiecţie.
197 Proiecţiile azimutale perspective se clasifica în baza criteriilor prezentate în cazul proiecţiilor azimutale, la care se adaugă şi clasificarea după poziţia punctului de vedere (V) fata În de funcţie centrul desferei distanţa terestre D, O 1, fiind evidenţiată de mărimea distanţei D dintre cele două dintre puncte punctul de vedere V, care poate fi V 1, V, V 3, V 4 şi V 5 şi centrul O 1 al sferei terestre,se disting: Proiecţii azimutale perspective centrale, cu V 1 =O 1 şi D=0 ; Proiecţii azimutale perspective interioare, cu V şi 0<D<R ; Proiecţii azimutale perspective stereografice, cu V 3 =Q şi D=R ; Proiecţii azimutale perspective exterioare, cu V 4 şi R<D< ; Proiecţii azimutale perspective ortografice, cu V 5 = şi D= ;
198 PROIECŢIA PERSPECTIVĂ ORTOGRAFICĂ Proiecţia perspectivă ortografică este acea proiecţie perspectivă în care punctul de vedere se consideră la infinit faţă de centrul sferei, razele ce vin spre zona de proiectat se consideră deci paralele D K paralelele se reprezintă prin cercuri concentrice cu centrul în proiecţia polului geografic; pe măsura depărtării de centrul proiecţiei spre margini, distanţele dintre cercurile ce reprezintă paralelele globului, se micşorează; meridianele se reprezintă prin drepte radiale, convergente în proiecţia polului geografic; aceste drepte paralele fac între ele unghiuri egale cu diferenţele longitudinii lor.
199 formulele generale pentru construcţia reţelei cartografice A ; R sin z x R sin cos cos sin cosl y R sin l cos cos z ; 1 p cos z sin tg z
200 DEFORMAŢII Facem următoarele notaţii: 1 modulul de deformare liniară după vertical; modulul de deformare liniară după almucantarat. Valorile modulelor 1 şi de deformare liniară după vertical şi almucantarat vor fi M ' V ' VV '' 1 cos z M V M V 0 0 AM ' ' 1 AM 0
201 Modulul de deformare areolară: în care: a = şi b = 1 = cos z, deci: Deformaţia unghiurilor: sin p sin i 1 1 p absin i p 1cos z cos z z sin 1 cos z tg cos 1 1 1cos z z z
202 PROIECŢIA PERSPECTIVĂ CENTRALĂ Proiecţia perspectivă centrală este acea proiecţie perspectivă în care punctul de vedere se consideră situat în centrul sferei În acest caz: D = 0, K = R. Rezultă că, dacă pe o hartă întocmită în această proiecţie se unesc printr-o linie dreaptă puncte, această linie reprezintă distanţa cea mai scurtă pe glob dintre aceste puncte (ortodroma). Proiecţiile azimutale perspective centrale se împart în:- normale;- oblice;- transversale.
203 Aspectul reţelei cartografice Considerăm proiecţia perspectivă centrală normală. În această proiecţie: paralelele se reprezintă prin cercuri concentrice cu centrul comun în proiecţia polului geografic; distanţele dintre proiecţiile paralelelor se măresc foarte mult pe măsura îndepărtării de la centrul proiecţiei spre margini. Ecuatorul nu se poate reprezenta meridianele se reprezintă prin drepte radiale, cu punctul de convergenţă în proiecţia polului geografic; acestea fac între ele unghiuri egale cu diferenţele de longitudini ale meridianelor
204 Formule pentru construirea reţelei cartografice Cazul proiecţiei perspective centrale oblice: sin0cos cos0sin cosl x R cos0cos sin0sin cosl sin sin l y R cos cos sin sin cos l 0 0 Cazul proiecţiei perspective centrale normale: sincos x R Rtgcos cos sinsin y R Rtgsin cos x y Rtgcos tg Rtgsin
205 Deformaţii Determinarea modulului de deformare 1 ab A Bsec z 1 sec z A B A B
206 Determinarea modulului de deformare sin z a c Rtg z d A cos z 1 sec z AC Rsin z d A sin z cos z Determinarea modulului p: Determinarea deformaţiilor direcţiilor 3 p 1 sec z sec z sec z z sin 1 cos z z sin tg 1 cos z z cos
207 Formulele generale ale proiecţiilor azimutale perspective oblice exterioare Pentru calculul coordonatelor plane polare (d,r) şi plane rectangulare (x, y) se consideră reprezentarea în proiecția azimutala perspectivă oblică exterioară (R<D< ), care constituie şi cazul general al acestor proiecţii. Calculul coordonatelor plane polare Se consideră secţionarea sferei terestre de raza R cu planul verticalului unui punct oarecare B de pe sfera, poziţia punctului de vedere V pe prelungirea diametrului principal Q 0 Q şi imaginile plane O şi B' ale punctelor Q 0 ( 0,λ 0 ) ŞI B(,λ) de pe sferă A K RsinZ D RcosZ o F 90 Z F Z KRsinZ D RcosZ
208 Calculul coordonatelor rectangulare, în funcţie de coordonatele sferice polare KR x cos sinzcosa D RcosZ KR y sin sinzsina D RcosZ in care: (A,Z) - coordonatele sferice polare ce definesc pe sfera terestră poziția punctului considerat, în raport cu polul proiecţiei Q 0 ( 0,λ 0 ); (D,K) - parametri constanţi care caracterizează principiul de reprezentare al proiecţiei azimutale perspective.
209 Calculul coordonatelor plane rectangulare, în funcţie de coordonatele geografice sferice x y KR( sin cos 0 cos sin 0cos l) D R( sinsin coscos cos l) 0 0 KRcos sin l D R( sinsin coscos cos l) 0 0
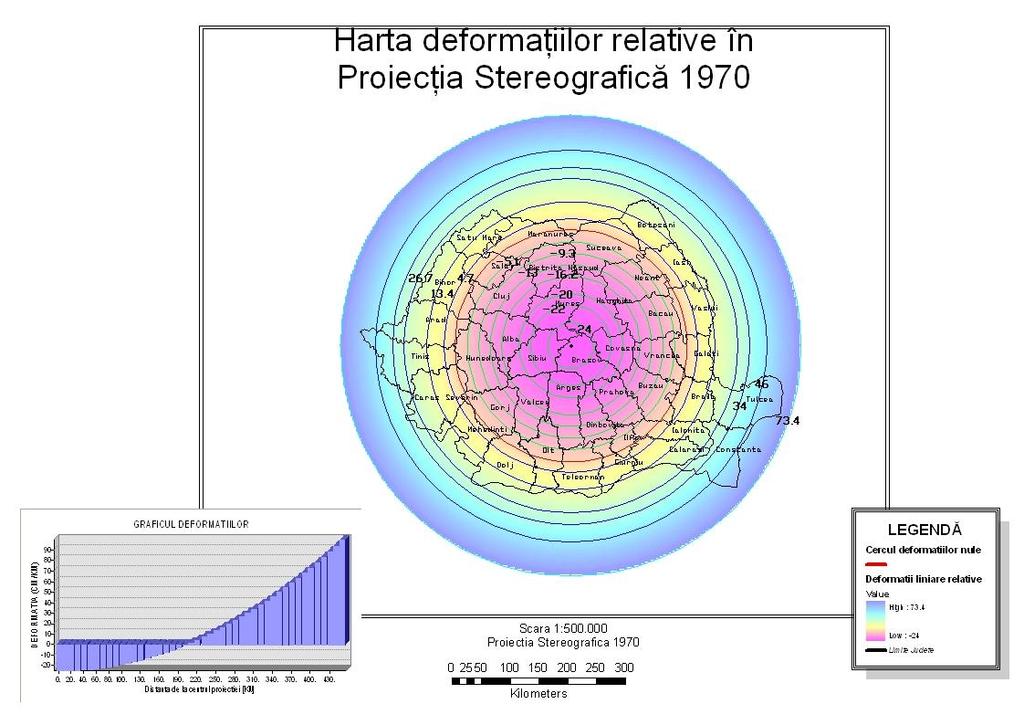
210 PROIECŢIA STEREOGRAFICĂ 1970 Proiecția azimutală perspectivă stereografică oblică conformă, cu planul de proiecţie secant unic 1970, fiind denumita şi Proiecţia STEREO - 70 ", a fost folosită începând cu anul 1973 la întocmirea planurilor topografice de baza la scările 1 : 000, 1 : şi 1 : , precum şi a hărţii cadastrale la scara 1 : Acest sistem de proiecţie s-a adoptat, având la baza elementele elipsoidului Krasovski şi planul de referinţă pentru cote MAREA NEAGRA La adoptarea proiecţiei stereografice s-au avut în vedere o serie de principii, care satisfac atât cerinţele de precizie, cat şi avantajele reprezentărilor cartografice, din care se menţionează : Teritoriul de reprezentat are o forma aproximativ rotundă, ce poate fi încadrat într-un cere cu raza de circa 300 km ; Suprafaţă teritoriului României se poate reprezenta pe un singur plan de proiecţie, obţinându-se un sistem unic de coordonate plane rectangulare, cu originea în punctul central al proiecţiei; Suprafaţă terestra se proiectează după legile perspectivei liniare Proiecţia fiind conformă, îndeplineşte condiţiile de simetrie faţă de meridianul de longitudine λ 0 al punctului central;
211 Elemente geometrice H - planul de proiecţie tangent sau secant la suprafaţa de referinţă; C - centrul de proiecţie; O1 - punctul de vedere din care pornesc razele de proiecţie, situat pe suprafaţa de referinţă diametral opus punctului C; P - punctul care se reprezintă; P' - proiecţia punctului P pe planul Ht. P - proiecţia punctului P pe planul Hs. axa x pe direcţia meridianului punctului C; axa y pe direcţia paralelului punctului C;
212 Coordonatele geografice ale punctului C sunt: 0 46 λ Punctul C este situat în apropierea oraşului Făgăraş.
213 Parametrii Elipsoidului de referință Krasovski Elipsoidul de referinţă Krasovski , care s-a folosit în proiecţia Gauss, în perioada , a fost menţinut şi în proiecţia Stereografica , fiind orientat la PULKOVO (RUSIA) şi având următorii parametrii de baza : Semiaxa mare: Semiaxa mică: a = , m b = , m Turtirea geometrică: α= 0, Prima excentricitate: e =0, Raza medie de curbură: R o = , 681 m
214 Adâncimea planului de proiecţie secant unic În vederea reducerii deformaţiilor s-a adoptat planul secant unic , la adâncimea H = 3 189,478 m faţă de planul tangent În urma intersectării sferei de raza R o cu planul secant, a rezultat un cerc al deformaţiilor nule, cu raza r o = 01,718 km.
215 Deformaţiile lungimilor şi suprafeţelor Deformaţia regională pe unitatea de lungime (1 km) în planul secant unic , din punctul central al proiecţiei Q o (φ o,λ o ), este de -0,5 m/km, după care scade în valoare negativă până la distanţa de r o = 01,718 km, unde este nula. În exteriorul cercului de deformaţie nula deformaţia liniara relativa creste în valoare pozitiva pana la valori de + 0,15 m/km la distanta d=85 km de punctul central al proiecţiei şi respectiv, până la + 0,637 m/km la distanta de d=385 km.
216
217 Sistemul axelor de coordonate rectangulare plane Originea sistemului (O) reprezintă imaginea plană a punctului central al proiecţiei Q o (φ o,λ o ), fiind situat aproximativ în centrul tarii, unde : axa absciselor (XX') orientata pe direcţia Nord - Sud reprezintă imaginea plană a meridianului punctului central Q o, de longitudine λ o = 5 ; axa ordonatelor (YY') orientata pe direcţia Est - Vest reprezintă tangenta la proiecţia paralelei punctului central Q o, de latitudine φ o = 46. Pentru lucrările topo-cadastrale şi pentru unele calcule cartografice se foloseşte sistemul convenţional de axe, care a rezultat din translarea sistemului cu originea în punctul O (Xo = 0,000 m şi Yo = 0,000 m) cu cate , 000 m spre vest şi respectiv spre sud, obţinându-se punctul O' cu X o = ,000 m şi Y o = ,000 m
218 m X' X -Y m O Y -X O Y' Sistemul de axe de coordonate plane, în proiecţia stereografica -1970
219 Modulul sau coeficientul de reducere la scara Pentru transformarea coordonatelor plane stereografice (X <70> ;Y <70> ) din planul tangent , în planul secant unic , paralel cu cel tangent se efectuează înmulţirea acestora cu modulul sau coeficientul de reducere la scară: 1 C=1 0, Modulul sau coeficientul de revenire la scara Pentru transformarea inversă a coordonatelor plane stereografice (X <70> ;Y <70> ) din planul secant unic , în planul tangent , se efectuează înmulţirea acestora cu coeficientul de revenire la scara : 1 1 C' 1, C 0,
220 Calculul elementelor geometrice ale PROIECŢIEI STEREOGRAFICE 1970 H, r0 Elementele geometrice ale reprezentării stereografice pe planul tangent şi pe planul secant unic Q o (φ o,λ o ) ; O(x o,y o ); QQ o =R o ; OD= R o ; Q o C=H ; CD=r o ;
221 Calculul adâncimii planului secant unic (H) Pentru stabilirea adâncimii planului secant unic (H) fata de planul tangent în punctul central al proiecţiei Q o (φ o,λ o ) se observă că mărimea respectivă se poate obţine din relaţia: in care : H QQ QC QQ o =R o, este diametrul sferei terestre de raza R o ; QC se determină din triunghiurile QCB" şi QQ o B asemenea si în care se scriu rapoartele dintre laturile omoloage: o QC QQ 0 0 CB '' Q B ' QC QQ0 QB 0 QC R0 x CB '' ' S ''
222 relaţia de calcul a adâncimii planului secant: '' S '' S H Ro Ro Ro 1 x x s-a exprimat valoarea termenului S /x = C, adoptându-se valoarea constanta : C=11/ , H R 1 C o o H R 1 0, ,478 m
223 Calculul razei cercului de secanta (r o ) În funcţie de adâncimea planului secant (H) s-a calculat şi raza cercului (r o ), după care planul secant intersectează sfera de raza medie R o. Din triunghiul dreptunghic OCD se poate scrie : CD OD OC r R OC R (R H) o o o o r0 R0 R0 R0 1 s x s s r R x x o 4 0 s s x x In funcţie de valoarea coeficientului de reducere la scara (C) şi de mărimea razei de curbura a sferei terestre (R o ), s-a obţinut: r 0 R0 R0 C C r 0 01,718 km
224 Deformaţii Proiecţia stereografică cu plan tangent S O' CP': tg S Rtg R 3 1 ( tg...) 3 8 s R s R S s Rtg R 3 s 1 s S R(...) 3 R 3 8 R 3 3 Rs Rs s S s R 4R 1R 3s ds ds ds 1R ds ds s ds 4R ds ds s 1 4 R 3
225 Deformaţii Proiecţia stereografică cu plan secant SS O ' O'' P'': tg SS ( R y) tg R y 3 1 tg s s R R 3 s s SS ( R y)( ) 3 R 4R 3 s s SS s y 1R R 3s y dss ds ds ds 1R R s y ds ds(1 ) R S 4R dss s y 1 ds 4 R R y 1 ( ) R 4000
226 Se observă că în planul secant deformaţia este mai mică decât în planul tangent cu 1/4.000
227 Deformaţiile liniare locale în funcţie de depărtarea faţă de punctul central al proiecţiei Stereo 1970 sunt redate în tabelul următor (R 0 = ,681 m). S [km] Deformația regionala [cm/km] Deformația relativa 0-5 1/ / / / / / / / / /1100
228 Curba deformaţiilor regionale (locale) pe plan secant unic este redată în Figura:
229
230 Calculul coordonatelor rectangulare plane STEREO 70 din coordonatele geografice Q o (φ o =46, λ o = 5 ) Pentru exemplificare, se considera coordonatele geografice (φ,λ) ale punctului P din cadrul unui trapez la scara 1 : Operaţiile de transformare a coordonatelor (φ,λ) în coordonate STEREO (x, y), se efectuează mai întâi pe planul tangent (x tg,y tg ) şi apoi pe planul secant (X <70>,Y <70> ), în următoarea succesiune: Se calculează diferenţele: ( ) 115'00" 0 p o care se transforma în secunde şi apoi se scriu sub forma : p ( ) 00' 00" l f o
231 e efectuează următoarele calcule: S a a f a f a f a f a f a f o S a a f a f a f a f S a a f a f S a S b b f b f b f b f b f S b b f b f b f S b b f
232 Se efectuează produsele dintre sumele S o, S, S 4, S 6 şi termenii l, l, l 4, l 6 si respectiv, dintre S 1, S 3, S 5 şi l, l 3, l 5 pe baza cărora se obţin rezultatele parţiale r o, r r 4, r 6 şi r 1, r 3, r 5 : r S 1, , o o r S l , r Sl 1 91, r 3 S4l 8, r4 S 4l r 5 S5l 0, r6 S6I 0, Se însumează algebric rezultatele parţiale (r) şi se exprima coordonatele din planul tangent de proiecţie stereografica 1970 : x =r r r r =140883, 458m tg o 4 6 y r r r =151 41,55m tg 1 3 5
233 Calculul coordonatelor geografice din coordonatele rectangulare plane STEREO 70 '' (A A X A X A X A X A X ) 1, A A X A X A X A X Y A A X A X Y A Y... l" B B X B X B X B X B X Y (B B X B X B X ) Y B B X Y
234 Calculul coordonatelor stereografice prin metoda reducerii la coardă Metoda reducerii la coardă utilizată la calculul coordonatelor stereografice, constă ca şi în proiecţia Gauss în reducerea direcţiilor măsurate şi distanţelor la planul de proiecţie. Dacă se consideră direcţia AB pe elipsoid sau sferă în planul de proiecţie va fi A B după linia curbă de lungime AB A reduce direcţia considerată înseamnă a stabili corecţiile de reducere la coardă A B notate cu AB şi BA şi distanţa dintre punctele A şi B luată după coarda A B notată cu SAB.
235 Reducerea direcţiilor la planul de proiecţie Suma unghiurilor în triunghiurile ABC şi A B C este aceeaşi (proiecţia este conformă), deci putem scrie: A B C a b c AB BA 180 e 180 AB BA La distanţe mici curba A B este un arc de cerc şi = si AB= BA= 1 A A '' x A B xb A '' S ABC '' '' x B y R B 1 R R x x C y y C 1 '' '' '' 4R x A y y B x B y y A
236 Reducerea distanţelor la planul de proiecţie Se demonstrează că între SAB şi sab există o legătură x y m m x y 1 1 x y S AB x m x s 1 AB 4R 48 R X X X 1 Y Y Y 1 m 0 0 În proiecţia cu plan secant obţinem distanţa: S K S AB y AB K 0, y
237 Cadrul şi dimensiunile trapezelor pe elipsoidul de referință şi în planul de proiecţie stereografic 1970 Hărţile şi planurile topografice în proiecţia STEREOGRAFICA 1970 au un cadru geografic, ce rezulta din imaginile plane ale unor arce de meridiane şi de paralele, care pe elipsoidul de referinţă delimitează trapeze curbilinii, denumite şi trapeze geodezice sau în mod curent trapeze, iar în planul de proiecţie poartă denumirea de foi de harta sau foi de plan
238 Convergenţa meridianelor în PROIECŢIA STEREOGRAFICĂ 1970 Unghiul de convergenta a meridianelor în proiecția stereografica este unghiul γ format de tangenta la meridianul ce trece prin punctul dat (A'M') cu paralela dusa prin același punct (A') la axa absciselor (A'X'), care reprezintă imaginea plană a meridianului centrului de proiecţie 0 i M ' A' B' 90 ; M ' A' X '; B ' A' C ';
239 Din definirea convergentei meridianelor care este identica cu cea prezentata in proiecţia Gauss, rezulta : x y x q y q tg y q q a a q 3a q 3a l 4a q 1a q a l 6a ql 1a q l 4a l 0a q l tg l f l f l l f l f l f l '' '' '' sin 0; n cos 0; coeficienti constanti '' sec '' tg '' ''
240 Proiecţia Stereografică utilizând planul secant local Proiecţia stereografică 1970, pe plan secant unic, fiind o proiecţie conformă perspectiva păstrează nealterate unghiurile figurilor de pe teren şi deformează pe plan tangent radial lungimile; în acest fel satisface majoritatea reprezentărilor în plan pentru scările 1:10 000, 1: 5 000, iar în anumite zone şi pentru scara 1: 000, unde deformaţia lungimilor nu depăşeşte 10 cm. Pentru zonele de mare importanţa economică, cum ar fi: zone industriale, centre populate, construcţii hidrotehnice, lucrări miniere etc. unde multitudinea detaliilor impune să se întocmească planuri topografice la scări mari 1:500-1: 000, proiecţia stereografică 1970 pe plan unic secant nu mai satisface ca precizie. În aceste cazuri se adoptă un plan secant local în funcţie de situaţia zonei ce trebuie ridicată topografic în plan. Prin aplicarea planului unic secant, se micşorează deformaţia cu 33 cm/km. În unele părţi ale periferiei ţării există totuşi o deformaţie de +67 cm/km. În oraşe unde se creează o precizie mai mare, instrucţiunile prevăd folosirea unui plan secant local paralele cu planul unic secant, dacă deformaţia liniară în oraşul respectiv depăşeşte cm/km. Planul secant local va trece printr-un punct de triangulaţie al oraşului, fie că el a fost determinat mai înainte, fie că se va determina din nou. Se va calcula coeficientul de transcalculare a coordonatelor care este raportul dintre distanţa în planul secant local şi cea corespunzătoare în planul unic secant, în felul următor: Fie punctul P (x,y ) ale cărui coordonate sunt date în planul unic secant. Acestui punct îi corespunde punctul P pe sferă şi punctul P 1 în proiecţia stereografică cu plan tangent. Cu ajutorul coordonatelor x şi y se va calcula distanţa d. Această distanţă se va împărţi cu coeficientul 0, obţinându-se distanţa d 1 în planul stereografic tangent; Se va calcula apoi distanţa ON în mod aproximativ:
241 ON R TN 0 R 0 d ON TL TNaprox LT d d d d TL TN LT d d d d TNaprox LT d d NL d d TL d d prov ) )( ( ) )( ( R 0 d ON ON R TN 0
242 PROIECŢII CONICE a) Proiectii drepte b) Proiectii oblice c) Proiectii transversale
243 Proiecţii conice se numesc acele proiecţii în care o zonă de pe suprafaţa globului este proiectată pe suprafaţa desfăşurabilă a unui con tangent sau secant la zona dată. Reţeaua cartografică, în proiecţia conică este o reţea formată din: proiecţiile meridianelor, care se reprezintă prin linii drepte concurente în acelaşi punct(vârful conului) şi care fac între ele unghiurile proporţionale cu longitudinile ; proiecţiile paralelelor, care se reprezintă prin arce de cerc concentrice având ca centru punctul de intersecţie a meridianelor Paralelul de tangenţă(paralelul mediu al zonei) este paralelul după care conul atinge globul. Caracteristica principală a paralelului de tangenţă este că, după desfăşurarea conului, aceste paralele îşi păstrează lungimea. Paralelele de secţionare sunt cele paralele determinate de conul care intersectează sfera, după o zonă oarecare. Coeficientul de proporţionalitate este raportul dintre unghiul format de cele apoteme corespunzătoare celor meridiane şi unghiul - diferenţa de longitudine dintre aceste meridiane: ', ' Când =1, =, adică proiecţia conică se transformă în proiecţie azimutală cu planul tangent în punctul P de convergenţă a meridianelor în care caz, se reduce la planul tangent în P.
244 A 0 B 0 D 0 paralelul de tangenţă 0 latitudinea paralelului de tangenţă egală cu latitudinea punctului B 0 - longitudinea punctului B 0 unghiul dintre cele apoteme ale conului corespunzătoare celor meridiane ce face între ele unghiul ' ρ 0 raza paralelului de tangenţă - distanţa polară a punctului A 0 de pe paralelul de secţionare: A 0 B 0 C 0 D 0 zona de reprezentat în proiecţia conică A 0 B 0, C 0 D 0 paralelele extreme ale zonei de reprezentat P 1 P paralelul de tangenţă sau paralelul mediu al zonei
245 REŢEAUA CARTOGRAFICĂ ŞI FORMULELE GENERALE ALE PROIECŢIILOR CONICE Reteaua normala se reprezinta sub forma de arce de arcuri concentrice si drepte concurente in centrul comun al arcelor de cerc, drepte ce formeaza intre ele unghiuri egale. O punctul central al proiecţiei P 1 P - paralelul de tangenţă A B, C D paralelele extreme ale zonei de reprezentat S 1, S, S 3 S 6 proiecţiile diferitelor meridiane 1, latitudinea paralelelor extreme 0 latitudinea paralelului mediu Rezultă că reţeaua cartografică va fi formată din: proiecţiile meridianelor linii drepte convergente; proiecţiile paralelelor arcuri de cercuri concentrice, cu centrul în punctul comun S, razele ale acestor cercuri sunt funcţii de latitudinea sau de distanţa polară
246 Formulele generale ale proiecţiilor ' f1( ) f ( ) Proiecţiile conice aplicate în cartografia matematică sunt: proiecţii conice echidistante: pe con tangent pe con secant proiecţii conice conforme proiecţii conice echivalente
247 Deformatii m d dx d Rd n Rsin N sin p m nsin i
248 PROIECŢII CONVENŢIONALE ŞI PROIECŢII DERIVATE
249 Reţeaua cartografică şi harta lumii în proiecţia Sanson


250 Reţeaua cartografică şi harta lumii în proiecţia Mollweide Repartizarea deformaţiilor
251 Planiglobul în proiecţie Sanson şi Mollweide
252 Harta lumii în proiecţia sinusoidală Eckert

253 Harta lumii în proiecţia Robinson


254 Reţeaua cartografică în Proiecţia pseudoconică Bonne
255 Harta lumii în proiecţia Grinten
256 Proiecţia Aitov
257 Harta lumii în proiecţia Aitov-Hammer

258 Harta lumii în proiecţia despicată Mollweide-Goode

259 Harta lumii în proiecţia despicată Eckert - Goode


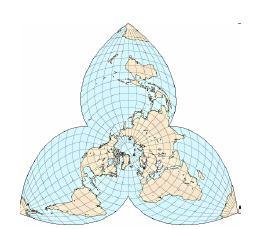
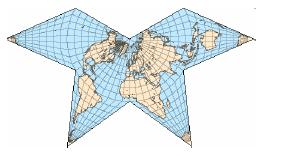
260 Hărţi ale lumii în proiecţia stelată
261 PROIECŢII CARTOGRAFICE UTILIZATE ÎN EUROPA Proiecţie stereografică oblică: Olanda, Polonia, România Proiecţia cilindrică conformă oblică: Ungaria, Elveţia Proiecţie Gauss-Krüger: Bulgaria, Croaţia, Germania, Slovenia; Proiecţie transversală conformă Mercator: Albania, Austria, Bulgaria, Finlanda, Grecia, Irlanda, Italia, Lituania, Luxemburg, Irlanda de Nord, Marea Britanie, Norvegia, Polonia, Portugalia, România, Rusia, Suedia, Turcia, Ucraina ; Proiecţie Universală Transversală Mercator: Cipru, Danemarca, Gibraltar, Islanda, Italia, Malta, Norvegia, Portugalia, Spania, Turcia; Proiecţie conică conform: Lambert: Belgia, Estonia, Franţa ; Proiecţie conică conformă oblică: Republica Cehă, Republica Slovacă ; Proiecţie Bonne: Portugalia
262 PROIECŢII CARTOGRAFICE RECOMANDATE DE UNIUNEA EUROPEANĂ În momentul actual în Uniunea Europeană se utilizează cinci elipsoizi de referinţă diferiţi şi opt tipuri de proiecţii cartografice. În viitor se doreşte introducerea unui singur sistem de proiecţie şi a unui singur sistem de stocare a datelor spaţiale pentru întreg continental. Astfel, se recomandă din partea Comisiei Europene a se utiliza următoarele tipuri de proiecţii cartografice: Proiecţia azimutală echivalentă Lambert: pentru analizele statistice; Proiecţia conică conformă Lambert: pentru realizarea hărţilor la scări mai mici sau egale cu 1: ; Proiecţia conformă UTM: pentru întocmirea hărţilor la scări mai mari de 1:

263 63 HĂRȚI NEOBIȘNUITE (Unusal maps)




264 HĂRȚI CU TENTA POLITICA 64



265 The Eagle Map of the United States


266 66 Franța 1796
267 67
268 68
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
Cursul nr. 1 Noţiuni generale de cartografie matematică
 Universitatea Politehnica din Timişoara Facultatea de Construcţii Specializarea: Măsurători Terestre și Cadastru Anul: III Curs: Cartografie 1 Cursul nr. 1 Noţiuni generale de cartografie matematică 1.1
Universitatea Politehnica din Timişoara Facultatea de Construcţii Specializarea: Măsurători Terestre și Cadastru Anul: III Curs: Cartografie 1 Cursul nr. 1 Noţiuni generale de cartografie matematică 1.1
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
Algebra si Geometrie Seminar 9
 Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Profesor Blaga Mirela-Gabriela DREAPTA
 DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Conice - Câteva proprietǎţi elementare
 Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...4
 SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
5.5. REZOLVAREA CIRCUITELOR CU TRANZISTOARE BIPOLARE
 5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii transversale, scrisă faţă de una dintre axele de inerţie principale:,
 REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
3. REPREZENTAREA PLANULUI
 3.1. GENERALITĂŢI 3. REPREZENTAREA PLANULUI Un plan este definit, în general, prin trei puncte necoliniare sau prin o dreaptă şi un punct exterior, două drepte concurente sau două drepte paralele (fig.3.1).
3.1. GENERALITĂŢI 3. REPREZENTAREA PLANULUI Un plan este definit, în general, prin trei puncte necoliniare sau prin o dreaptă şi un punct exterior, două drepte concurente sau două drepte paralele (fig.3.1).
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
GEOMETRIE PLANĂ TEOREME IMPORTANTE ARII. bh lh 2. abc. abc. formula înălţimii
 GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Dreapta in plan. = y y 0
 Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
Cum folosim cazuri particulare în rezolvarea unor probleme
 Cum folosim cazuri particulare în rezolvarea unor probleme GHEORGHE ECKSTEIN 1 Atunci când întâlnim o problemă pe care nu ştim s-o abordăm, adesea este bine să considerăm cazuri particulare ale acesteia.
Cum folosim cazuri particulare în rezolvarea unor probleme GHEORGHE ECKSTEIN 1 Atunci când întâlnim o problemă pe care nu ştim s-o abordăm, adesea este bine să considerăm cazuri particulare ale acesteia.
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
TOPOGRAFIE - CARTOGRAFIE LP. 5. Elemente de cartometrie
 TOPOGRAFIE - CARTOGRAFIE LP. 5 Elemente de cartometrie Cartometria este acea parte a cartografiei care se ocupă cu procedeele şi instrumentele necesare aprecierii cantitative a diferitelor obiecte sau
TOPOGRAFIE - CARTOGRAFIE LP. 5 Elemente de cartometrie Cartometria este acea parte a cartografiei care se ocupă cu procedeele şi instrumentele necesare aprecierii cantitative a diferitelor obiecte sau
Esalonul Redus pe Linii (ERL). Subspatii.
. Subspatii.") Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
y y x x 1 y1 Elemente de geometrie analiticã 1. Segmente 1. DistanŃa dintre douã puncte A(x 1,y 1 ), B(x 2,y 2 ): AB = 2. Panta dreptei AB: m AB =
, B(x 2,y 2 ): AB = 2. Panta dreptei AB: m AB =") Elemente de geometrie analiticã. Segmente. DistanŃa dintre douã puncte A(, ), B(, ): AB = ) + ( ) (. Panta dreptei AB: m AB = +. Coordonatele (,) ale mijlocului segmentului AB: =, =. Coordonatele punctului
Elemente de geometrie analiticã. Segmente. DistanŃa dintre douã puncte A(, ), B(, ): AB = ) + ( ) (. Panta dreptei AB: m AB = +. Coordonatele (,) ale mijlocului segmentului AB: =, =. Coordonatele punctului
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
3. Locuri geometrice Locuri geometrice uzuale
 3. Locuri geometrice 3.. Locuri geometrice uzuale oţiunea de loc geometric în plan care se găseşte şi în ELEETELE LUI EUCLID se pare că a fost folosită încă de PLATO (47-347) şi ARISTOTEL(383-3). Locurile
3. Locuri geometrice 3.. Locuri geometrice uzuale oţiunea de loc geometric în plan care se găseşte şi în ELEETELE LUI EUCLID se pare că a fost folosită încă de PLATO (47-347) şi ARISTOTEL(383-3). Locurile
MARCAREA REZISTOARELOR
 1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
6.CONUL ŞI CILINDRUL. Fig Fig. 6.2 Fig. 6.3
 6.CONUL ŞI CILINDRUL 6.1.GENERALITĂŢI Conul este corpul geometric mărginit de o suprafaţă conică şi un plan; suprafaţa conică este generată prin rotaţia unei drepte mobile, numită generatoare, concurentă
6.CONUL ŞI CILINDRUL 6.1.GENERALITĂŢI Conul este corpul geometric mărginit de o suprafaţă conică şi un plan; suprafaţa conică este generată prin rotaţia unei drepte mobile, numită generatoare, concurentă
Vectori liberi Produs scalar Produs vectorial Produsul mixt. 1 Vectori liberi. 2 Produs scalar. 3 Produs vectorial. 4 Produsul mixt.
 liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
Asupra unei inegalităţi date la barajul OBMJ 2006
 Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
7. Fie ABCD un patrulater inscriptibil. Un cerc care trece prin A şi B intersectează
 TEMĂ 1 1. În triunghiul ABC, fie D (BC) astfel încât AB + BD = AC + CD. Demonstraţi că dacă punctele B, C şi centrele de greutate ale triunghiurilor ABD şi ACD sunt conciclice, atunci AB = AC. India 2014
TEMĂ 1 1. În triunghiul ABC, fie D (BC) astfel încât AB + BD = AC + CD. Demonstraţi că dacă punctele B, C şi centrele de greutate ale triunghiurilor ABD şi ACD sunt conciclice, atunci AB = AC. India 2014
Lectia VII Dreapta si planul
 Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
GEOMETRIE PLANĂ TEOREME IMPORTANTE ARII. = înălţimea triunghiului echilateral h =, R =, r = R = bh lh 2 A D ++ D. abc. abc =
 GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Subiecte Clasa a VII-a
 lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
CURS MECANICA CONSTRUCŢIILOR
 CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
Seminar 5 Analiza stabilității sistemelor liniare
 Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
z a + c 0 + c 1 (z a)
") 1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
Capitolul 9. Geometrie analitică. 9.1 Repere
 Capitolul 9 Geometrie analitică 9.1 Repere Vom considera spaţiile liniare (X, +,, R)în careelementelespaţiului X sunt vectorii de pe odreaptă, V 1, dintr-un plan, V sau din spaţiu, V 3 (adică X V 1 sau
Capitolul 9 Geometrie analitică 9.1 Repere Vom considera spaţiile liniare (X, +,, R)în careelementelespaţiului X sunt vectorii de pe odreaptă, V 1, dintr-un plan, V sau din spaţiu, V 3 (adică X V 1 sau
1. Scrieti in casetele numerele log 7 8 si ln 8 astfel incat inegalitatea obtinuta sa fie adevarata. <
 Copyright c 009 NG TCV Scoala Virtuala a Tanarului Matematician 1 Ministerul Educatiei si Tineretului al Republicii Moldova Agentia de Evaluare si Examinare Examenul de bacalaureat la matematica, 17 iunie
Copyright c 009 NG TCV Scoala Virtuala a Tanarului Matematician 1 Ministerul Educatiei si Tineretului al Republicii Moldova Agentia de Evaluare si Examinare Examenul de bacalaureat la matematica, 17 iunie
2.3 Geometria analitică liniarăînspaţiu
 2.3 Geometria analitică liniarăînspaţiu Pentru început sădefinim câteva noţiuni de bază în geometria analitică. Definitia 2.3.1 Se numeşte reper în spaţiu o mulţime formată dintr-un punct O (numit originea
2.3 Geometria analitică liniarăînspaţiu Pentru început sădefinim câteva noţiuni de bază în geometria analitică. Definitia 2.3.1 Se numeşte reper în spaţiu o mulţime formată dintr-un punct O (numit originea
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
2. CALCULE TOPOGRAFICE
 . CALCULE TOPOGRAFICE.. CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE... CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE DIN COORDONATE RECTANGULARE Distanţa în linie dreaptă dintre două puncte se poate calcula dacă
. CALCULE TOPOGRAFICE.. CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE... CALCULAREA DISTANŢEI DINTRE DOUĂ PUNCTE DIN COORDONATE RECTANGULARE Distanţa în linie dreaptă dintre două puncte se poate calcula dacă
Lucian Maticiuc SEMINAR Conf. dr. Lucian Maticiuc. Capitolul VI. Integrala triplă. Teoria:
 Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
Geometrie computationala 2. Preliminarii geometrice
 Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
Să se arate că n este număr par. Dan Nedeianu
 Primul test de selecție pentru juniori I. Să se determine numerele prime p, q, r cu proprietatea că 1 p + 1 q + 1 r 1. Fie ABCD un patrulater convex cu m( BCD) = 10, m( CBA) = 45, m( CBD) = 15 și m( CAB)
Primul test de selecție pentru juniori I. Să se determine numerele prime p, q, r cu proprietatea că 1 p + 1 q + 1 r 1. Fie ABCD un patrulater convex cu m( BCD) = 10, m( CBA) = 45, m( CBD) = 15 și m( CAB)
Capitolul 4. Integrale improprii Integrale cu limite de integrare infinite
 Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
DEFINITIVAT 1993 PROFESORI I. sinx. 0, dacă x = 0
 DEFINITIVAT 1993 TIMIŞOARA PROFESORI I 1. a) Metodica predării noţiunii de derivată a unei funcţii. b) Să se reprezinte grafic funci a sinx, dacă x (0,2π] f : [0,2π] R, f(x) = x. 0, dacă x = 0 2. Fie G
DEFINITIVAT 1993 TIMIŞOARA PROFESORI I 1. a) Metodica predării noţiunii de derivată a unei funcţii. b) Să se reprezinte grafic funci a sinx, dacă x (0,2π] f : [0,2π] R, f(x) = x. 0, dacă x = 0 2. Fie G
Criptosisteme cu cheie publică III
 Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
CERCUL LUI EULER ŞI DREAPTA LUI SIMSON
 CERCUL LUI EULER ŞI DREAPTA LUI SIMSON ABSTRACT. Articolul prezintă două rezultate deosebite legate de patrulaterul inscriptibil şi câteva consecinţe ce decurg din aceste rezultate. Lecţia se adresează
CERCUL LUI EULER ŞI DREAPTA LUI SIMSON ABSTRACT. Articolul prezintă două rezultate deosebite legate de patrulaterul inscriptibil şi câteva consecinţe ce decurg din aceste rezultate. Lecţia se adresează
OANA CONSTANTINESCU. ( a carei ecuatie matriceala este data in raport cu un reper cartezian R = {O; ē 1,, ē n }.
 ELEMENTE DE SIMETRIE ALE UNEI HIPERCUADRICE IN SPATII AFINE EUCLIDIENE OANA CONSTANTINESCU 1. Centru de simetrie pentru o hipercuadrica afina Pentru inceput cadrul de lucru este un spatiu an real de dimensiune
ELEMENTE DE SIMETRIE ALE UNEI HIPERCUADRICE IN SPATII AFINE EUCLIDIENE OANA CONSTANTINESCU 1. Centru de simetrie pentru o hipercuadrica afina Pentru inceput cadrul de lucru este un spatiu an real de dimensiune
CURS XI XII SINTEZĂ. 1 Algebra vectorială a vectorilor liberi
 Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
Functii Breviar teoretic 8 ianuarie ianuarie 2011
 Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
TRIUNGHIUL. Profesor Alina Penciu, Școala Făgăraș, județul Brașov A. Definitii:
 TRIUNGHIUL Profesor lina Penciu, Școala Făgăraș, județul rașov Daca, si sunt trei puncte necoliniare, distincte doua câte doua, atunci ( ) [] [] [] se numeste triunghi si se noteaza cu Δ. Orice Δ determina
TRIUNGHIUL Profesor lina Penciu, Școala Făgăraș, județul rașov Daca, si sunt trei puncte necoliniare, distincte doua câte doua, atunci ( ) [] [] [] se numeste triunghi si se noteaza cu Δ. Orice Δ determina
Puncte, plane si cercuri fundamentale pe sfera cereasca
 Astronomie sferica Puncte, plane si cercuri fundamentale pe sfera cereasca Aparente: Corpurile ceresti par situate pe o calota sferica; Stelele nu-si schimba pozitia relativa- gruparea in constelatii;
Astronomie sferica Puncte, plane si cercuri fundamentale pe sfera cereasca Aparente: Corpurile ceresti par situate pe o calota sferica; Stelele nu-si schimba pozitia relativa- gruparea in constelatii;
CURS 9 MECANICA CONSTRUCŢIILOR
 CURS 9 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA NOŢIUNI DE BAZĂ ÎN CINEMATICA Cinematica studiază mişcările mecanice ale corpurilor, fără a lua în considerare masa acestora şi
CURS 9 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA NOŢIUNI DE BAZĂ ÎN CINEMATICA Cinematica studiază mişcările mecanice ale corpurilor, fără a lua în considerare masa acestora şi
Concurs MATE-INFO UBB, 1 aprilie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
Seminariile Capitolul IX. Integrale curbilinii
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 7 8 Capitolul IX. Integrale curbilinii. Să se calculee Im ) d, unde este segmentul
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 7 8 Capitolul IX. Integrale curbilinii. Să se calculee Im ) d, unde este segmentul
CONCURS DE ADMITERE, 17 iulie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
Toate subiectele sunt obligatorii. Timpul de lucru efectiv este de 3 ore. Se acordă din oficiu 10 puncte. SUBIECTUL I.
 Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
7. PROBLEME DE SINTEZĂ (punct, dreaptă, plan, metode)
") PL STZĂ 115 7. PL STZĂ (punct, dreaptă, plan, metode) 7.1 Probleme reolvate 1. Se dă forma geometrică din figura 7.1. Să se repreinte epura ei şi să se studiee tipurile de drepte, plane şi poiţiile relative
PL STZĂ 115 7. PL STZĂ (punct, dreaptă, plan, metode) 7.1 Probleme reolvate 1. Se dă forma geometrică din figura 7.1. Să se repreinte epura ei şi să se studiee tipurile de drepte, plane şi poiţiile relative
a carei ecuatie matriceala este data in raport cu R.
 POZITIA RELATIVA A UNEI DREPTE FATA DE O HIPERCUADRICA AFINA REALA. TANGENTE SI ASIMPTOTE. OANA CONSTANTINESCU Pentru studiul pozitiei relative a unei drepte fata de o hipercuadrica, remarcam ca nu mai
POZITIA RELATIVA A UNEI DREPTE FATA DE O HIPERCUADRICA AFINA REALA. TANGENTE SI ASIMPTOTE. OANA CONSTANTINESCU Pentru studiul pozitiei relative a unei drepte fata de o hipercuadrica, remarcam ca nu mai
a. 11 % b. 12 % c. 13 % d. 14 %
 1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
EDITURA PARALELA 45 MATEMATICĂ DE EXCELENŢĂ. Clasa a X-a Ediţia a II-a, revizuită. pentru concursuri, olimpiade şi centre de excelenţă
 Coordonatori DANA HEUBERGER NICOLAE MUŞUROIA Nicolae Muşuroia Gheorghe Boroica Vasile Pop Dana Heuberger Florin Bojor MATEMATICĂ DE EXCELENŢĂ pentru concursuri, olimpiade şi centre de excelenţă Clasa a
Coordonatori DANA HEUBERGER NICOLAE MUŞUROIA Nicolae Muşuroia Gheorghe Boroica Vasile Pop Dana Heuberger Florin Bojor MATEMATICĂ DE EXCELENŢĂ pentru concursuri, olimpiade şi centre de excelenţă Clasa a
Problema a II - a (10 puncte) Diferite circuite electrice
 Diferite circuite electrice") Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
CAPITOLUL 8 CURBE ÎN PLAN ŞI ÎN SPAŢIU Curbe în plan
 CAPITOLUL 8 CURBE ÎN PLAN ŞI ÎN SPAŢIU 81 Curbe în plan I Definiţia analitică a curbelor plane În capitolul 7 am studiat deja câteva eemple de curbe plane, amintim aici conicele nedegenerate: elipsa, hiperbola
CAPITOLUL 8 CURBE ÎN PLAN ŞI ÎN SPAŢIU 81 Curbe în plan I Definiţia analitică a curbelor plane În capitolul 7 am studiat deja câteva eemple de curbe plane, amintim aici conicele nedegenerate: elipsa, hiperbola
Principiul Inductiei Matematice.
 Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
Exemple de probleme rezolvate pentru cursurile DEEA Tranzistoare bipolare cu joncţiuni
 Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
Al cincilea baraj de selecţie pentru OBMJ Bucureşti, 28 mai 2015
 Societatea de Ştiinţe Matematice din România Ministerul Educaţiei Naţionale Al cincilea baraj de selecţie pentru OBMJ Bucureşti, 28 mai 2015 Problema 1. Arătaţi că numărul 1 se poate reprezenta ca suma
Societatea de Ştiinţe Matematice din România Ministerul Educaţiei Naţionale Al cincilea baraj de selecţie pentru OBMJ Bucureşti, 28 mai 2015 Problema 1. Arătaţi că numărul 1 se poate reprezenta ca suma
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25
 Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
IV. CUADRIPOLI SI FILTRE ELECTRICE CAP. 13. CUADRIPOLI ELECTRICI
 V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
Conice şi cercuri tangente
 Conice şi cercuri tangente Ioan POP 1 Abstract It proves how to obtain the non-degenerate conics, ellipse, hyperbola and parabola, of some basic tangent problems Keywords: circle, ellipse, hyperbola, parabola
Conice şi cercuri tangente Ioan POP 1 Abstract It proves how to obtain the non-degenerate conics, ellipse, hyperbola and parabola, of some basic tangent problems Keywords: circle, ellipse, hyperbola, parabola
 4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
Lectia III Produsul scalar a doi vectori liberi
 Produsul scalar: denitie, proprietati Schimbari de repere ortonormate in plan Aplicatii Lectia III Produsul scalar a doi vectori liberi Oana Constantinescu Oana Constantinescu Lectia III Produsul scalar:
Produsul scalar: denitie, proprietati Schimbari de repere ortonormate in plan Aplicatii Lectia III Produsul scalar a doi vectori liberi Oana Constantinescu Oana Constantinescu Lectia III Produsul scalar:
CAPITOLUL 6 GEOMETRIE LINIARĂ ÎN SPAŢIU Sisteme de coordonate în plan şi în spaţiu. I. Coordonate carteziene
 Geometrie liniară în spaţiu CAPITOLUL 6 GEOMETRIE LINIARĂ ÎN SPAŢIU 6.. Sisteme de coordonate în plan şi în spaţiu I. Coordonate carteziene În cele ce urmează, notăm cu E 3 spaţiul punctual tridimensional
Geometrie liniară în spaţiu CAPITOLUL 6 GEOMETRIE LINIARĂ ÎN SPAŢIU 6.. Sisteme de coordonate în plan şi în spaţiu I. Coordonate carteziene În cele ce urmează, notăm cu E 3 spaţiul punctual tridimensional
CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
cateta alaturata, cos B= ipotenuza BC cateta alaturata AB cateta opusa AC
 .Masurarea unghiurilor intr-un triunghi dreptunghic sin B= cateta opusa ipotenuza = AC BC cateta alaturata, cos B= AB ipotenuza BC cateta opusa AC cateta alaturata AB tg B=, ctg B= cateta alaturata AB
.Masurarea unghiurilor intr-un triunghi dreptunghic sin B= cateta opusa ipotenuza = AC BC cateta alaturata, cos B= AB ipotenuza BC cateta opusa AC cateta alaturata AB tg B=, ctg B= cateta alaturata AB
Capitolul COTAREA DESENELOR TEHNICE LECŢIA 21
 Capitolul COTAREA DESENELOR TEHNICE LECŢIA 21! 21.1. Generalităţi.! 21.2. Elementele cotării.! 21.3. Aplicaţii.! 21.1. Generalităţi! Dimensiunea este o caracteristică geometrică liniară sau unghiulară,care
Capitolul COTAREA DESENELOR TEHNICE LECŢIA 21! 21.1. Generalităţi.! 21.2. Elementele cotării.! 21.3. Aplicaţii.! 21.1. Generalităţi! Dimensiunea este o caracteristică geometrică liniară sau unghiulară,care
CUPRINS 5. Reducerea sistemelor de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
Timp alocat: 180 minute. In itemii 1-4 completati casetele libere, astfel incat propozitiile obtinute sa fie adevarate.
 Copyright c 009 ONG TCV Scoala Virtuala a Tanarului Matematician 1 Ministerul Educatiei si Tineretului al Republicii Moldova Agentia de Evaluare si Examinare Examenul de bacalaureat la matematica, 15 iunie
Copyright c 009 ONG TCV Scoala Virtuala a Tanarului Matematician 1 Ministerul Educatiei si Tineretului al Republicii Moldova Agentia de Evaluare si Examinare Examenul de bacalaureat la matematica, 15 iunie
5.4. MULTIPLEXOARE A 0 A 1 A 2
 5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
4. METODELE GEOMETRIEI DESCRIPTIVE
 4. METODELE GEOMETRIEI DESCRIPTIVE 4.1. GENERALITĂŢI În general corpurile geometrice sunt în poziţii oarecare faţă de planele de proiecţie. Prin metodele geometriei descriptive proiecţiile acestor corpuri
4. METODELE GEOMETRIEI DESCRIPTIVE 4.1. GENERALITĂŢI În general corpurile geometrice sunt în poziţii oarecare faţă de planele de proiecţie. Prin metodele geometriei descriptive proiecţiile acestor corpuri
Geometria diferenţială a curbelor în spaţiu
 Geometria diferenţială a curbelor în spaţiu A. U. Thor 0.1 Generalităţi Definitia 1.1 Se numeşte curbă înspaţiu dată parametric mulţimea punctelor M (x, y, z) din spaţiuacăror coordonate sunt date de x
Geometria diferenţială a curbelor în spaţiu A. U. Thor 0.1 Generalităţi Definitia 1.1 Se numeşte curbă înspaţiu dată parametric mulţimea punctelor M (x, y, z) din spaţiuacăror coordonate sunt date de x
BARAJ DE JUNIORI,,Euclid Cipru, 28 mai 2012 (barajul 3)
") BARAJ DE JUNIORI,,Euclid Cipru, 8 mi 0 (brjul ) Problem Arătţi că dcă, b, c sunt numere rele cre verifică + b + c =, tunci re loc ineglitte xy + yz + zx Problem Fie şi b numere nturle nenule Dcă numărul
BARAJ DE JUNIORI,,Euclid Cipru, 8 mi 0 (brjul ) Problem Arătţi că dcă, b, c sunt numere rele cre verifică + b + c =, tunci re loc ineglitte xy + yz + zx Problem Fie şi b numere nturle nenule Dcă numărul