REZISTENŢA MATERIALELOR
|
|
|
- Ἀρταξέρξης Μαρής
- 7 χρόνια πριν
- Προβολές:
Transcript
1 OCANU FLORENTINA REZISTENŢA ATERIALELOR PARTEA a-ii-a NOŢIUNI RECAPITULATIVE ELEENTE DE TEORIA ELASTICITĂŢII SOLICITĂRI COPUSE BARE CURBE SOLICITĂRI DINAICE PRIN ŞOC VASE CU PEREŢI SUBŢIRI CALCULUL DE REZISTENŢĂ LA OBOSEALĂ
2 Cuprins CAPITOLUL. NOŢIUNI RECAPITULATIVE.. Caracteristici geometrice ae suprafeţeor pane Eemente de statică Sarcini Reaeme şi reacţiuni Eforturi Tensiuni Reaţii între eforturi şi tensiuni Depasări şi deformaţii Soicitări simpe Teoreme şi metode energetice CAPITOLUL. ELEENTE DE TEORIA ELASTICITĂŢII.. Starea de tensiuni într-un punct a unui corp Starea generaă de tensiuni Starea pană şi uniaxiaă de tensiuni Variaţia tensiunior în juru unui punct. Tensiuni principae Starea spaţiaă de tensiuni Starea pană de tensiuni (biaxiaă) Starea iniară de tensiuni (monoaxiaă) Starea de deformaţii într-un punct a unui corp Starea generaă de deformaţii Variaţia deformaţiior în juru unui punct Ecuaţiie fundamentae ae Teoriei Easticităţii Ecuaţii de echiibru (Cauch) Ecuaţii geometrice (între deformaţii şi depasări) Ecuaţii constitutive (fiice) Teorii de reistenţă Ipotea tensiunii normae maxime Ipotea deformaţiei specifice iniare maxime Ipotea tensiunii tangenţiae maxime Ipotea energiei de deformaţie Ipotea energiei de deformaţie modificatoare de formă Teoria stării imită a ui ohr Probeme propuse... 9
3 CAPITOLUL 3. SOLICITĂRI COPUSE 3.. Generaităţii Soicitări compuse a care apar tensiuni pe aceeaşi direcţie Soicitarea axiaă excentrică Sâmbure centra Soicitarea de încovoiere obică (dubă) Soicitarea compusă de încovoiere şi forţă axiaă Grini cotite (cadre) Cadre static determinate (grini cotite) Cadre static nedeterminate exterior Cadre static nedeterminate interior Cadre static nedeterminate exterior şi interior Deformaţia sistemeor pane 43 Probeme propuse Soicitări a care apar tensiuni pe direcţii diferite Soicitarea de încovoiere cu torsiune Bare cotite spaţiae Cacuu arborior drepţi a torsiune cu încovoiere Probeme propuse... 6 CAPITOLUL 4. BARE CURBE 4.. Generaităţii Bare curbe sub formă de arc de cerc Cacuu coeficientuui de formă Axa neutră a secţiunii unei bare curbe Deformaţia bareor curbe sub formă de arc de cerc Diagrame de eforturi a bare curbe sub formă de arc de cerc Bare curbe sub formă de arc de cerc static determinate Bare curbe sub formă de arc de cerc static nedeterminate exterior Bare curbe sub formă de arc de cerc static nedeterminate interior 99 Probeme propuse Bare curbe cu raă mare de curbură. Arce paraboice 07 Probeme propuse... 9 CAPITOLUL 5. SOLICITĂRI DINAICE PRIN ŞOC 5.. Consideraţii generae Cacuu a soicitări dinamice prin şoc.. Probeme propuse
4 CAPITOLUL 6. VASE CU PEREŢI SUBŢIRI 6.. Generaităţii Ecuaţia ui Lapace Vase cu pereţi subţiri care conţin ga Vase cu pereţi subţiri care conţin ichid. 47 Probeme propuse CAPITOLUL 7. CALCULUL DE REZISTENŢĂ LA OBOSEALĂ 7.. Consideraţii generae Casificarea soicitărior variabie Reistenţa a oboseaă. Curba Wőher Diagrame ae reistenţeor a oboseaă Factori care infuenţeaă reistenţa a soicitări variabie ateriau şi tehnoogia de fabricaţie Natura soicitării Concentratorii de tensiune Dimensiunie piesei Starea suprafeţei Temperatura Cacuu coeficientuui de siguranţă a soicitării variabie.. 8 Probeme propuse Bibiografie
5 CAPITOLUL NOŢIUNI RECAPITULATIVE În acest capito se preintă o recapituare minimaă a principaeor noţiuni studiate în cursu de Reistenţa materiaeor I, absout necesare abordării discipinei de Reistenţa materiaeor II... Caracteristici geometrice ae suprafeţeor pane Pentru o suprafaţă pană, care poate fi cea a secţiunii transversae a unei bare, raportată a un sistem de referinţă O (axa Ox fiind aeasă pe direcţia axei barei) au fost definite următoaree caracteristici geometrice ae suprafeţeor pane: aria, momentee statice, momentee de inerţie, moduee de reistenţă, raee de inerţie. Se consideră o figură pană de formă oarecare, de arie A, raportată a un sistem de axe rectanguare O (figura.). integraa: Aria secţiunii are ca unitatea de măsură [mm ] şi se cacueaă cu A da (.) A 5
6 da A O Figura.. S-a considerat secţiunea compusă dintr-o infinitate de arii eementare da, integraa semnificând extinderea cacuuui pe toată secţiunea. omentee statice ae suprafeţei faţă de axee O, respectiv O se cacueaă cu reaţiie: S da; A S da (.) omentu static se măsoară în [mm 3 ]. omentee statice se poate utiia pentru determinarea poiţiei centruui de greutate G a ariei secţiunii transversae. Dacă se noteaă cu G şi G coordonatee centruui de greutate G a unei figuri (figura.) se pot scrie reaţiie: S A A ; S A G (.3) G A G G O G Figura.. 6
7 Din reaţiie (.3) reută coordonatee centruui de greutate: G G S A (.4) S A Dacă o suprafaţă oarecare este compusă aceasta se divide în figuri simpe, pentru care se cunosc aria şi poiţia centruui de greutate, iar momentee statice ae întregii figuri se determină prin sumarea agebrică a momenteor statice ae figurior componente. Prin urmare: S S n i n i A i A i Gi Gi (.5) Pentru o suprafaţă oarecare, care poate fi descompusă în figuri simpe, coordonatee centruui de greutate se cacueaă cu reaţiie: în care: A n A i i G G n i n i este aria întregii figuri; A A i - aria figurii i; Gi, Gi - coordonatee centruui de greutate a figurii i. i A (.6) A i A Gi Gi De reţinut Orice axă de simetrie conţine centru de greutate a figurii. La intersecţia a două axe de simetrie se găseşte centru de greutate. Ariie şi momentee statice ae unor gouri sunt considerate negative. 7
8 omentu static a secţiunii faţă de o axă care trece prin centru de greutate a secţiunii este nu. Sistemu de axe care are originea în centru de greutate a secţiunii transversae se numeşte sistem de axe centra, iar axee sunt axe centrae Pentru suprafaţa pană din figura.3 au fost definite: momentee de inerţie axiae, momentu de inerţie centrifuga, momentu de inerţie poar. A da r O Figura.3. omentee de inerţie axiae ae unei figuri, faţă de axee O şi respectiv O, sunt date de reaţiie: I I A A da da (.7) omentu de inerţie centrifuga se determină cu reaţia: I da (.8) A omentu de inerţie poar se determină cu reaţia: 8
9 I p r da (.9) A Dacă se apică teorema ui Pitagora pentru unu din triunghiurie formate în figura.3 reută r + şi înocuind în reaţia (.9) se obţine: p I I + I (.0) De reţinut: omentee de inerţie axiae şi poare sunt întotdeauna poitive. omentu de inerţie centrifuga poate fi poitiv, nu sau negativ. Unitatea de măsură pentru toate momentee de inerţie este [mm 4 ]. omentee de inerţie ae gourior se consideră negative. omentu de inerţie poar este ega cu suma momenteor de inerţie axiae faţă de două axe perpendicuare oarecare care trec prin pou considerat. Axee în raport cu care I 0 se numesc axe principae de inerţie. Faţă de aceste axe, momentee de inerţie axiae I şi I au vaori maxime, respectiv minime. Axee de simetrie sunt şi axe principae. Axee principae care trec prin centru de greutate a figurii se numesc axe principae centrae. 0 da O G 0 A 0 O 0 Figura.4. 9
10 Pentru o suprafaţă pană de arie A raportată a un sistem de referinţă centra, faţă de care momentee de inerţie ae suprafeţei sunt I, I şi I (figura.4) s-au determinat momentee de inerţie ae suprafeţei faţă de un at sistem de referinţă, având axee paraee cu primu. Aceste momente sunt date de reaţiie (.) numite reaţiie ui Steiner. I I I I + A o o I + A o o I + o o A o o (.) unde: coordonatee 0 şi 0 sunt uate cu semnu or şi repreintă coordonatee originii sistemuui vechi în nou sistem de coordonate. Reaţiie (.) indică faptu că: momentu de inerţie axia faţă de o axă paraeă cu o axa centraă este ega cu momentu de inerţie faţă de axa centraă pus produsu dintre aria secţiunii şi pătratu distanţei dintre cee două axe, iar momentu de inerţie centrifuga este ega cu momentu de inerţie centrifuga faţă de axee centrae pus produsu distanţeor (dintre cee două axe) cu aria. Pentru momentu de inerţie poar s-a stabiit următoarea expresie: I po p o + o I + ( )A (.) Dacă se cunosc momentee de inerţie în raport cu nişte axe oarecare, atunci pentru axee care trec prin centru de greutate a figurii, paraee au axee date, momentee de inerţie sunt date de reaţiie: I I I I o - o A I - A o o I - o o A o o (.3) De reţinut: Reaţiie (.) se foosesc frecvent pentru cacuu momenteor de inerţie ae figurior compuse. 0
11 omentee de inerţie în raport cu axee centrae au cea mai mică vaoare în comparaţie cu momentee de inerţie pentru oricare ate axe paraee cu primee. Pentru o suprafaţă pană de arie A raportată a un sistem de referinţă centra, faţă de care momentee de inerţie ae suprafeţei sunt I, I şi I (figura.5) s-au determinat momentee de inerţie ae suprafeţei faţă de un at sistem de referinţă rotit cu unghiu α faţă de primu. 0 da 0 0 O G 0 α A Figura.5. Faţă de sistemu de axe rotit momentee de inerţie sunt date de următoaree expresii: I I I o o o I + I I - I + cos α - I sin α I + I I - I - cos α + I sin α I - I sin α + I cos α o (.4) Dacă se adună primee două reaţii (.4) reută: I 0 + I 0 I + I I p constant (.5)
12 Vaorie extreme (maxime şi minime) ae momenteor, numite momente de inerţie principae se noteaă cu I şi I şi se determină cu reaţia: ( I - I ) I + I I + 4, ± I Pentru I I max se consideră semnu (+), iar pentru I I min semnu (-). Direcţiie principae (direcţiie axeor principae) sunt date de ecuaţia: tg I (.6) α (.7) I - I Vaorie extreme ae momentuui de inerţie centrifuga I corespund unui sistem de axe care fac un unghi de 45 o faţă de axee principae şi se cacueaă cu reaţia: I, I - I ± (.8) De reţinut: Suma momenteor de inerţie axiae în raport cu orice pereche de axe ortogonae care trec printr-un po dat este constantă şi egaă cu momentu de inerţie poar indiferent de poiţia pe care aceste axe o ocupă prin rotirea în juru originii. Axee de simetrie ae unei figuri sunt axe principae de inerţie. Axee faţă de care momentee de inerţie axiae au vaori extreme se numesc axe principae de inerţie şi se noteaă cu şi. Direcţiie principae sunt ortogonae. Pentru I < 0 axa principaă (faţă de care momentu de inerţie este maxim) trece prin primu cadran, iar pentru I > 0 prin cadranu a doiea. Pentru secţiunie cu o singură axă de simetrie aceasta este axă principaă, iar a doua este perpendicuara pe aceasta prin centru de greutate.
13 Din punct de vedere practic un interes deosebit preintă momentee de inerţie centrae principae (momente cacuate în raport cu axee principae care trec prin centru de greutate a secţiunii). oduee de reistenţă axiae W şi W au fost definite de reaţiie: W W unde: max distanţa de a axa O a punctu ce mai îndepărtat a secţiunii; max distanţa de a axa O a punctu ce mai îndepărtat a secţiunii. I max I max (.9) odu de reistenţă poar s-a definit ca raport între momentu de inerţie poar şi distanţa de a po până a punctu ce mai îndepărtat a secţiunii: I p W p (.0) r max De reţinut: oduee de reistenţă se măsoară în [mm 3 ]. Raee de inerţie sau de giraţie ae unei figurii, în raport cu un sistem de axe O sunt date de expresiie: i i I A I A (.) Pentru axee de inerţie principae centrae raee de inerţie principae sunt: i i I A I A (.) 3
14 Aceste rae de giraţie sunt semiaxee eipsei principae centrae de inerţie a figurii a cărei ecuaţie este: i + (.3) i De reţinut: Unitatea de măsură pentru raee de inerţie este cea de ungime [mm]. Pentru câteva secţiuni simpe caracteristicie geometrice au următoaree expresii (ee au fost determinate în prima parte a cursuui prin integrarea directă a reaţiior de definiţie): - secţiunea dreptunghiuară de înăţime h şi baă b: Abh; 3 bh I ; 3 hb I ; - secţiunea pătrată de atură a (bh): bh W 6 hb W (.4) 6 Aa ; I 4 a I ; - secţiunea circuară de diametru d: W 3 a W (.5) 6 A πd ; 4 I 4 πd I ; 64 4 πd I p ; W πd πd W ; W p (.6) 3 6 W i I A πd 64 4 i 4 πd d 4 - secţiunea coroană circuară cu diametru exterior D şi ce interior d: π A ( D 4 - d ); I I π ( D d 4 ); I p π ( D 3 I I I I π 4 4 p p π 4 4 W ( D - d ); W p ( D - d ) (.7) D max 3D r D max 6D 4 - d 4 ) i I π ( D - 64 d 4 4 i D + A ) π ( D 4 - d ) 4 d 4
15 - secţiunea triunghi oarecare de ăţime b şi înăţime h (în raport cu sistemu de axe centra): bh A ; 3 bh I ; 36 - secţiunea poigon reguat cu n aturi de ungime a: bh W (.8) πr πr I I sinα( cosα + ) ; I p sinα( cosα + ) (.9) α 6α unde: α π ; n R a sinα De reţinut: În afară de secţiunie simpe, ae căror caracteristicie geometrice sunt cacuate, în practica inginerească se foosesc profie standardiate (profi I, U, T cornier cu aripi egae şi neegae) ae căror caracteristici geometrice se găsesc tabeate. Pentru determinarea caracteristicior geometrice ae unei secţiuni compuse, care poate fi descompusă în figuri simpe, se vor parcurge următoaree etape:. Se descompune secţiunea compusă în figuri simpe.. Se aege unui sistem de referinţă arbitrar. 3. Se determină poiţia centruui de greutate a secţiunii, cu reaţia (.6). 4. Se determină, utiiând reaţiie (.3), momentee de inerţie axiae I, I şi ce centrifuga I faţă de sistemu de axe centra (un sistem de axe cu originea în centru de greutate a secţiunii şi cu axee paraee cu cee ae sistemuui iniţia). 5. Se determină, cu reaţia (.7) unghiu de rotire a axeor principae. 6. Cu reaţia (.6) se determină momentee de inerţie principae. 7. Cu reaţiie (.9) şi (.) se determină moduee de reistenţă axiae şi respectiv raee de inerţie centrae. 5
16 De reţinut: oduee de inerţie ae unei secţiuni compuse nu se pot cacua prin sumarea agebrica a modueor de reistenta ae figurior componente. Etapee menţionate se apică pentru cau genera. În cau existenţei axeor de simetrie cacuu se simpifică... Eemente de statică omentu unei forţe se poate cacua faţă de un po şi în raport cu o axă. oduu momentuui unei forţe F r faţă de un punct O (faţă de un po) este ega cu produsu dintre moduu forţei şi braţu acesteia: F b (.30) Braţu forţei b repreintă mărimea perpendicuarei dusă din po pe suportu forţei (figura.9). omentu forţei faţă de pou O mai poate fi exprimat şi ca produs vectoria dintre vectoru de poiţie a forţei (care uneşte pou O cu punctu de apicaţie a forţei) şi forţă: r r r F (.3) omentu este perpendicuar pe panu format de vectorii r şi F r, iar sensu momentuui este dat de regua burghiuui drept (burghiu este rotit în sensu de suprapunere a ui r peste F r pe drumu ce mai scurt), iar mărimea momentuui se determină cu reaţia (.47). oduu momentuui unei forţe în raport cu o axă este ega cu moduu momentuui proiecţiei forţei pe panu norma a axă, cacuat în raport cu punctu în care axa înţeapă panu. 6
17 Cupu (figura.9) este format din două forţe paraee, egae şi de sensuri contrare. Acesta produce numai rotaţie şi se repreintă printr-un vector iber, perpendicuar pe panu cupuui. sensu rotirii F O d/ d/ F Figura.9. oduu momentuui care caracterieaă un cupu se cacueaă cu reaţia: F d (.3) Reducerea unei forţe în raport cu un punct a corpuui este preentată în figura.0. Se pune probema reducerii în punctu O a forţei F r, care acţioneaă în B. Reducerea se face prin adăugarea şi scăderea forţei F r în punctu O. Astfe forţa F r care acţioneaă în B poate fi înocuită cu o forţă F r care acţioneaă în O şi momentu r care caracterieaă cupu produs de cee două forţe barate. De obicei O este aes în centru de greutate a secţiunii. b F F F F F b O B O B O B F Figura.0. 7
18 Pentru ca un corp sau un sistem de corpuri, afat sub acţiunea forţeor r r,f,...,, să fie în echiibru, este necesar şi suficient ca forţa reutantă şi r F Fn momentu reutant să fie nue ( R r 0; r 0). Prin urmare trebuie satisfăcute condiţiie: n i n i n i X Y i Z i i n i n i n i i( ox ) i( o ) i( o ) (.33) Reaţiie (.33) exprimă faptu că sumee agebrice ae proiecţiior tuturor forţeor şi ae momenteor faţă de cee trei axe trebuie să fie nue. Dacă forţee sunt copanare (sunt situate în panu xo), reaţiie (.33) se reduc a următoaree trei ecuaţii de echiibru independente: n i n i n i X Y i i 0 0 i( o ) 0 (.34) unde: X i - proiecţia forţei F r i pe axa Ox; Y i - proiecţia forţei F r i i(o) - momentu forţei pe axa O; r F i faţă de O în care axa O înţeapă panu xo. Observaţie: În unee situaţii primee două ecuaţii din reaţiie (.34) pot fi înocuite cu ecuaţii de momente, obţinându-se un sistem de trei ecuaţii, format astfe: 8
19 - o ecuaţie de proiecţie a forţeor şi două de moment, cu preciarea că proiecţia forţeor nu se face pe o direcţie normaă a dreapta determinată de cee două puncte faţă de care se scriu ecuaţiie de momente; - trei ecuaţii de momente, scrise faţă de trei puncte care nu sunt coiniare. Dacă nu se respectă aceste condiţii ecuaţiie scrise nu sunt toate independente, unee fiind combinaţii iniare ae ceorate..3. Sarcini Forţee şi momentee care soicită corpu se numesc sarcini. În Reistenţa materiaeor se consideră forţee şi momentee concentrate ca fiind vectori egaţi (nu este permisă depasarea punctuui de apicaţie pe dreapta suport) şi se opereaă mai mut cu moduu acestora. După cum s-a preentat în prima parte a cursuui sarcinie se pot casifica astfe: ) după mărimea suprafeţei pe care acţioneaă: - sarcini concentrate (forţe şi momente care acţioneaă pe suprafeţe ae corpurior care pot fi considerate mici în raport cu dimensiunie corpuui); - sarcini distribuite (forţe şi momente care acţioneaă pe suprafeţe mari). Sarcinie pot fi uniform distribuite, iniar distribuite, sarcini distribuite după egi paraboice, exponenţiae, etc. De reţinut: Intensitatea forţeor distribuite în pan se exprimă în [N/mm] sau în [N/mm ] (în cau forţeor provenite din presiune, a greutăţii unei înveitori sau a unei păci). Intensitatea forţei reutante concentrate (măsurată în [N]), static echivaentă cu cea distribuită, este numeric egaă cu aria suprafeţei, cuprinsă între curba de variaţie a forţei distribuite şi grindă. Punctu 9
20 de apicaţie a forţei reutante coincide cu abscisa centruui de greutate a suprafeţei respective. Înocuirea forţeor distribuite cu forţe concentrate nu este posibiă decât într-un număr imitat de situaţii (de ex. cacuu reacţiunior) când corpu încă este considerat rigid. Uterior înocuirea nu mai este admisă, deoarece ar modifica modu de deformare a corpuui. Pentru o bară de secţiune constantă, confecţionată dintr-un materia omogen, greutatea este o forţă uniform distribuită. Intensitatea acestei forţe distribuite poate fi afată împărţind greutatea barei a ungimea acesteia [N/mm] şi repreintă deci greutatea unităţii de ungime. Greutatea este înocuită cu o forţă reutantă concentrată, static echivaentă, care acţioneaă în centru de greutate a corpuui. ) după variaţia or în timp: - sarcini statice (figura.a). Intensitatea sarcinii creşte într-un timp reativ îndeungat şi rămâne constantă după ce a atins intensitatea maximă; - sarcini dinamice, care pot fi periodice sau aperiodice (figura.c) sau sarcinie care se apică cu viteă mare (intensitatea sarcinii variaă de a ero a o vaoare maximă într-un timp foarte scurt (figura.b)). F F const. F min F max t [sec] a) b) c) Figura..4. Reaeme şi reacţiuni Tipurie de reaeme, repreentărie schematiate şi reacţiunie care apar în fiecare tip de reaem sunt preentate în tabeu. 0
21 Denumirea reaemuui Reemare Nr de grade de ibertate suprimate Tabeu Repreentări schematiate simpă V V V Articuaţia H H ciindrică (simpă) V V Încastrarea 3 H V H V Reaemee au rou de a suprima anumite grade de ibertate ae corpuui. Acest ucru se reaieaă prin apariţia în reaem a unor forţe (care împiedică una sau două transaţii) şi/sau momente (care împiedică rotirea). Forţee şi momentee care apar în reaeme se numesc reacţiuni (împreună cu sarcinie care soicită corpu reacţiunie formeaă un sistem în echiibru). De reţinut: ) Cacuu anaitic a reacţiunior se efectueaă cu respectarea următoareor etape: - schematiarea formei corpuui; - schematiarea moduui de reemare (stabiirea tipuui de reaem şi figurarea reacţiunior corespunătoare); - schematiarea moduui de încărcare (stabiirea forţeor şi a cupurior); - scrierea ecuaţiior de echiibru pentru sistemu de sarcini copanare (reaţiie (. 50)) cu aegerea arbitrară a convenţiior de semne;
22 reacţiunior. - reovarea sistemuui de ecuaţii, determinarea şi verificarea ) În pan pot fi scrise numai trei ecuaţii independente. De obicei, acestea sunt: două ecuaţii de proiecţii a forţeor şi o ecuaţie de momente (reaţiie (. 5)). 3) Dacă număru reacţiunior este ce mut ega cu număru ecuaţiior de echiibru, acestea pot fi cacuate din ecuaţiie staticii. Asemenea sisteme se numesc static determinate. Condiţia pentru ca un sistem să fie static determinat poate fi scrisă: NN NE (.35) unde: NN număru necunoscuteor (reacţiuni sau uneori eforturi); NE număru ecuaţiior staticii care nu sunt identic nue. 4) Dacă număru necunoscuteor (reacţiunior) depăşeşte pe ce a ecuaţiior de echiibru sistemu este static nedeterminat. La aceste sisteme: NN > NE (.36) Diferenţa dintre număru de necunoscute şi număru ecuaţiior de echiibru poartă numee de grad (ordin) de nedeterminare. În acest ca reacţiunie se determină prin reovarea sistemuui format din ecuaţiie de echiibru competate cu un număr de ecuaţii scrise în urma studierii deformaţiior corpuui, ega cu gradu de nedeterminare..5. Eforturi Componentee eforturior R r şi r R după cee trei axe ae un sistem triortogona de axe principa centra cu originea în G (centru de greutate a secţiunii transversae) în care axa Ox coincide cu axa geometrică a corpuui sunt indicate în figura.: - componenta N, normaă a secţiune, se numeşte forţă axiaă şi apare în cau soicitărior axiae;
23 - componentee T şi T sunt în panu secţiunii şi se numesc forţe tăietoare; - componenta x este normaă pe secţiune, apare a torsiunea (răsucirea) bareor şi se numeşte moment de torsiune; - componentee şi sunt în panu secţiunii, se numesc momente de încovoiere (momente încovoietoare) şi apar a soicitarea de încovoierea. Cee şase componente ae eforturior se determină astfe (în pan se există ce mut trei componente nenue): - forţa axiaă N este egaă cu suma agebrică a tuturor proiecţiior forţeor exterioare pe axa Ox (axa barei); - forţee tăietoare T şi T sunt egae cu suma agebrică a proiecţiior tuturor forţeor exterioare pe axa O şi respectiv O; - momentu de torsiune x este ega cu suma agebrică a tuturor cupurior exterioare dirijate după axa Ox; - momentee încovoietoare şi sunt egae cu suma agebrică a tuturor momenteor exterioare faţă de axa O şi respectiv O. F F I T T T 0 G R N x I 0 G x R x F F a) b) Figura.. 3
24 Aşa cum s-a studiat în cursu de Reistenţa materiaeor I, utiiând definiţiie de mai sus se pot stabii eforturie în orice secţiune a corpuui şi se pot trasa curbee or de variaţie, numite diagrame de eforturi..6. Tensiuni În cursu de Reistenţa materiaeor I s-a definit tensiunea medie pe un eement suprafaţa A, din juru punctuui, (figura.4a) prin următoarea reaţie (reutanta a eementuui): R r a forţeor de egătură fiind apicată în centru de greutate r p med A r R (.37) A iar vaoarea tensiunii în punctu prin reaţia: r r dr p im (.38) da da 0 F A R F τ p x I O x da I O x F F a) b) Figura.4 De reţinut: Unitatea de măsura a tensiunii este [N/mm Pa] şi depinde atât de dr r cât şi de orientarea eementuui de suprafaţă da (tensiunea fiind o mărime tensoriaă). 4
25 Tensiunea poate fi descompusă (figura.4b) în două componente: - pe direcţia normaei în componenta x, numită tensiune normaă (orientată de direcţia axei Ox); - pe panu secţiunii în componenta τ, numită tensiune tangenţiaă. La rându său, componenta τ poate fi descompusă în panu O, (a care Ox este normaă) obţinându-se componentee τ x şi τ x (figura.5) care sunt paraee cu axee O şi respectiv O. F τ τ x p F τ x I da O x x Figura.5 Pentru cee două tensiuni tangenţiae semnificaţia indicior este următoarea: primu indice desemneaă axa normaă a panu secţiunii (axa Ox ) iar a doiea axa cu care tensiunea este paraeă (axee O şi respectiv O)..7. Reaţii între eforturi şi tensiuni În cursu de Reistenţa materiaeor I, s-au demonstrat următoaree reaţiie între eforturi şi tensiuni numite ecuaţii de echivaenţă: N da (.39) A x 5
26 x T T τ da (.40) A x τ da (.4) A x ( τ x τ x )da τrda (.4) A da A x A (.43) da (.44) A x unde: N, T, T respectiv x,, repreintă cee şase eforturie; - x, τ x, τ x cee trei tensiunie într-un punct a secţiunii (figurie.6a şi.6b), situat a distantee, faţă de cee două axe respectiv r faţă de centru de greutate. F τ x F τ x F I da τ τ x T x T N O G x F I da τ τ x x r x O G a) b) x Figura.6 De reţinut: Deoarece nu conţin caracteristici fiice de materia ecuaţii de echivaenţă sunt vaabie pentru orice corp soid..8. Depasări şi deformaţii 6
27 În cursu de Reistenţa materiaeor I, s-au definit următoaree noţiuni: - depasarea repreintă modificarea poiţiei unui punct sau a unei secţiuni a corpuui. Se studiaă depasări eastice sau easto-pastice produse ca urmare a deformării corpuui, atunci când acesta îşi modifică dimensiunie şi forma geometrică iniţiaă; - deformaţia repreintă modificarea distanţei dintre puncte sau secţiuni, sau a unghiurior dintre două segmente duse printr-un punct. odificărie ungimior segmenteor se numesc deformaţii iniare iar modificărie unghiurior deformaţii unghiuare sau unecări. De reţinut: Deformaţiie depind de forma şi dimensiunie corpuui, de mărimea şi modu de apicare a sarcinior şi de anumite caracteristici mecanice ae materiaeor. Dacă deformaţiie dispar după înăturarea sistemuui de sarcini (corpu revine a forma şi dimensiunie iniţiae), se spune că avem deformaţii eastice. Pentru majoritatea materiaeor utiiate a reaiarea structurior de reistenţă deformaţiie eastice sunt foarte mici în raport cu dimensiunie corpurior confecţionate din aceste materiae. Se face preciarea că, în cee ce urmeaă ne vom referi a deformaţii eastice mici..9. Soicitări simpe În practică se întânesc soicitări simpe (atunci când pe secţiunea corpuui apare o singură componentă a eforturior şi respectiv a tensiunior) şi soicitări compuse (atunci când în secţiunea corpuui apar simutan ce puţin două componente ae eforturior şi tensiunior). În cursu de Reistenţa materiaeor I, 7
28 au fost studiate următoaree patru soicitări simpe: soicitărie axiae (tracţiune sau compresiune), forfecare, torsiune şi încovoiere (tabeu ). Soicitărie compuse vor fi studiate în cursu de Reistenţa materiaeor II. Se vor preenta în continuare principaee noţiuni definite şi reaţii demonstrate în cursu de Reistenţa materiaeor I, referitoare a cee patru soicitări simpe..9.. Soicitarea axiaă (tracţiune - compresiune) Tracţiunea şi compresiunea se numesc soicitări axiae deoarece suporturie forţeor sunt dirijate tangent a axa geometrica a barei. La acestea diferă între ee numai semnu eforturior, tensiunior şi aungirior specifice: poitive pentru tracţiune şi negative pentru compresiune. Tabeu Soicitarea Schema de soicitare Efortu nenu Tensiunea Tracţiune N N N N N > 0 > 0 Compresiune N < 0 < 0 Forfecare (Tăiere) T T T (sau T ) τ Torsiune (Răsucire) Încovoiere x x x (sau ) τ În ceea ce priveşte soicitarea de compresiune a bareor de ungime mare, trebuie făcută preciarea că este posibi să apară fenomenu de fambaj ongitudina, 8
29 studiat în prima parte a cursuui (pierderea stabiităţii înainte ca tensiunea de compresiune să atingă vreo stare imită). De reţinut: În cau în care suportu forţeor exterioare nu coincide cu axa barei, dar este parae cu ea, bara va fi supusă, în afara soicitării de întindere sau compresiune şi a încovoiere. Această situaţie constituie soicitarea axiaă excentrică care va fi studiată în cadru soicitărior compuse. Pentru o bară dreaptă confecţionată dintr-un materia omogen şi iotrop, cu secţiunea transversaă constantă soicitată axia s-a stabiit că tensiunea normaă sunt constantă pe secţiunea transversaă ( x constant) şi este dată de reaţia: N x A (.45) unde: x tensiunea normaă într-o secţiune curentă a barei; N - forţa axiaă în secţiunea respectivă, care se determină din diagrama de forţe axiae; A aria secţiunii transversae a barei. Cacuu de dimensionare se face a proiectarea pieseor şi permite stabiirea dimensiunior secţiunii transversae a piesei soicitate axia. Dimensionarea prin metoda tensiunior admisibie presupune că tensiunie maxime din piesă (uate în modu) nu vor depăşi pe cee admisibie conform reaţiei: (.46) x max Ţinând cont şi de reaţia (.64) formua de dimensionare este: A nec a a N (.47) 9
30 Cacuu de verificare se face pentru piese a care se cunosc dimensiunie secţiunii transversae. De obicei, acest cacu constă în verificarea inegaităţii din reaţia (.65). Dacă inegaitatea se verifică, piesa reistă a sarcinie propuse. O ată variantă a acestui cacu presupune determinarea sarcinii maxime pe care o poate suporta piesa, numită sarcină capabiă. Cacuu se face cu o reaţie de forma: N cap A (.48) În cau bareor sau porţiunior de bară de secţiune constantă, supuse a eforturi axiae constante (tensiuni constante), deformaţia se determină cu reaţia: N (.49) EA unde: - ungimea barei; E - moduu de easticitate ongitudinaă. Se observă că deformaţia este cu atât mai mică cu cât produsu dintre moduu de easticitate E a materiauui şi aria secţiunii transversae A este mai mic. Ca urmare acest produs se numeşte modu de rigiditate a întinderecompresiune a secţiunii transversae. În cau în care tensiunie variaă pe ungimea barei aungirea totaă a barei se cacueaă cu reaţia: N( x) ε ( x x) dx dx 0 0 (.50) EA( x) a De reţinut: În reaţia (.50) forţa axiaă şi aria pot fi funcţii de x. Reaţiie (.49) şi (.50) pot fi foosite pentru cacuu depasării reative, adică depasarea unei secţiuni a barei faţă de ată secţiune, respectiv a depasării unui punct de pe axa barei. În cau bareor cu mai mute regiuni depasărie absoute ae secţiunior acestor bare (faţă de un reper fix) se cacueaă prin însumarea agebrică 30
31 a depasărior porţiunior de bară (pe fiecare regiune, depasărie au semnu tensiunior). Energia specifică de deformaţie pentru cau soicitărior axiae centrice, pentru o porţiune de ungime a barei, se cacueaă cu reaţia: N ( x ) U dx (.5) 0 A( x )E Dacă pentru porţiunea studiată forţa axiaă şi aria sunt constante (nu depind de x), expresia energiei din reaţia (.5) devine: N U (.5) AE Dacă bara are mai mute regiuni, energia totaă acumuată va fi suma agebrică a energiior corespunătoare de pe cee n regiuni: U n U i (.53) i.9.. Soicitarea de forfecare Atunci când în secţiunea transversaă a unui corp acţioneaă numai o forţă tăietoare (T sau T ), acesta este soicitat a forfecare (tăiere) pură. În secţiunea barei apar în acest ca numai tensiuni tangenţiae. În practică este însă extrem de difici să se reaiee o soicitare de forfecare pură, de cee mai mute ori forfecarea fiind însoţită de încovoiere. De reţinut: În cursu de Reistenţa materiaeor I, s-au studiat situaţiie în care tensiunie normae, provenite din încovoiere, sunt negijabie în raport cu cee tangenţiae, produse de forfecare şi în care cacuu convenţiona a forfecare dă reutate satisfăcătoare. 3
32 Forfecarea unei bare este produsă de către două forţe coiniare, normae pe axa acesteia, egae şi de sens contrar, aşa cum este preentat în figura.7. F F b F F a) b) Figura.7 Pentru cacuu convenţiona a bareor a forfecare s-a presupus că tensiunie tangenţiae sunt uniform distribuite pe secţiune. Această ipoteă se verifică în practică numai pentru forfecarea pieseor de grosime mică (tabe, şuruburi mici, nituri, ştifturi, pene, etc.). În aceste condiţii tensiunie tangenţiae se cacueaă cu reaţia: T τ x A (.54) Observaţie: Reaţia (.54) rămâne vaabiă şi pentru forfecarea pe direcţia axei O, dacă se înocuieşte indicee cu. Reaţia (.54) permite reovarea următoaree trei categorii de probeme: - cacuu de dimensionare (se determină aria secţiunii transversae): A nec T (.55) τ a 3
33 - cacuu de verificare (se determină tensiunea tangenţiaă maximă care se compară cu tensiunea admisibiă sau cu cea de rupere). Bara reistă dacă: T τ ef τ a (.56) A - cacuu forţei tăietoare capabie sau a ceei de rupere prin forfecare: T cap Aτ respectiv T Aτ (.57) a Expresia energiei de deformaţie înmagainată de către bara supusă a forfecare se poate fi determina cu reaţia: r r Pentru T const. se obţine: U T dx (.58) GA 0 T U (.59) GA unde: - este ungimea porţiunii de bară deformată; G moduu de easticitate transversaă; A aria secţiunii transversae. GA moduu de rigiditate a forfecare a secţiunii transversae. De reţinut: Deoarece voumu de materia deformat este mic energia potenţiaă de deformaţie înmagainată a forfecare va fi mică, comparativ cu ate soicitări şi va fi uua negijată Soicitarea de torsiune Aşa cum s-a preciat în cursu de Reistenţa materiaeor I, o bară dreaptă este soicitată a torsiune dacă efortu din secţiunea transversaă este un moment x care, în repreentare vectoriaă, este dirijat după axa Ox (aeasă convenţiona pe direcţia axei barei). Practic are oc deformarea barei sub acţiunea unor cupuri 33
34 de forţe cuprinse în pane perpendicuare pe axa geometrică a acesteia, iar suporturie forţeor nu intersecteaă axa. S-au stabiit reaţiie necesare efectuării cacueor de reistenţă şi de rigiditate pentru cau bareor drepte de secţiune circuară supuse a torsiune (răsucire). Pentru cacuu tensiunii tangenţiae a fost stabiită reaţia: x r τ ( r ) (.60) I Reaţia (.60) arată că tensiunea tangenţiaă este distribuită iniar pe direcţia raei: tensiunea tangenţiaă este nuă în centru de greutate a barei (a r 0), variaă iniar cu raa r şi este maximă pe conturu secţiunii, aşa cum este repreentat în figura.8. Pe conturu barei, pentru r R, se obţine: τ(r) p x R x τ ( R ) (.6) I I R τ(r) r O p p R e τ(r) τ(r e ) r R i x a) b) x Figura.8. Tensiunea tangenţiaă maximă se cacueaă cu reaţia: unde: I p - momentu de inerţie poar; W p - moduu de reistenţă poar. x τ max τ( R ) (.6) W p 34
35 Reaţia (.6) poate fi foosită pentru cacuu din condiţia de reistenţă (dimensionare sau verificare), imitând tensiunie din bară. Ea se mai numeşte criteriu de reistenţă. Astfe: - pentru dimensionare se cacueaă diametru barei impunând condiţia ca tensiunea tangenţiaă maximă să nu o depăşească pe cea admisibiă: τ max τ a (.63) - în cacuu de verificare toate mărimie sunt cunoscute şi se verifică doar dacă este satisfăcută inegaitatea (.63). De reţinut: În reaţia (.63) τ max τ(r) repreintă tensiunea tangenţiaă în secţiunea (sau regiunea) pericuoasă, care se stabieşte în urma trasării diagrameor x şi τ(r). Pentru cacuu deformaţiei unghiuare a răsucire s-a stabiit reaţia: x θ (.64) GI unde: G moduu de easticitate transversaă. Se observă ca deformaţia a răsucire este cu atât mai mică cu cât produsu GI p este mai mare. Ca urmare acest produs poartă numee de modu de rigiditate a torsiune a barei cu secţiune circuară. Pentru deformaţii mici s-a determinat unghiu de rotire a secţiunii transversae ca fiind: p x φ (.65) GI Reaţia (.64) poate fi foosită pentru cacuu din condiţia de rigiditate (dimensionare sau verificare), imitând astfe deformaţiie şi nu tensiunie. Ea se mai numeşte criteriu de rigiditate. Astfe: - pentru dimensionare se cacueaă diametru barei impunând condiţia ca rotirea specifică maximă să nu o depăşească pe cea admisibiă: p 35
36 θ θ a (.66) - în cacuu de verificare toate mărimie sunt cunoscute şi se verifică doar dacă este satisfăcută inegaitatea (.66). De reţinut: Unghiu de rotire specific admisibi se ia funcţie de regimu de ucru a arboreui (θ a (0,5..0,3) o /m). Pentru cacuu de dimensionare reaţiie (.63) si (.66) vor furnia două vaori pentru aceeaşi mărime (diametru barei). Reovarea probemei constă în aegerea vaorii ceei mai mari din cee două, întrucât aceasta va satisface ambee condiţii. Expresia momentuui de torsiune cunoscând puterea şi turaţia a fost stabiită ca fiind: t P (.67) π n unde: t - momentu de torsiune [Nm]; P puterea [W]; n - turaţia [rot/sec]. Dacă turaţia este în rot/min reaţia (.86) devine: 30 P P t 9,55 (.68) π n n De reţinut: Reaţia (.68) poate avea în membru din dreapta diverşi coeficienţi, care provin din utiiarea ator unităţi de măsură. Energia potenţiaă de deformaţie înmagainată de către o bară dreaptă de secţiune circuară soicitată a torsiune se cacueaă cu reaţia: 36
37 x U dx (.69) GI 0 p Dacă x const. pe toată ungimea barei, reaţia (.88) devine: x U (.70) GI iar dacă bara are n regiuni, energia totaă se determină prin însumarea energiior corespunătoare fiecărei regiuni, adică: p U n U i i (.7).9.4. Soicitarea de încovoiere Soicitarea de încovoiere poate fi încovoiere pură şi încovoiere simpă. Prin încovoiere pură se înţeege deformarea unei grini produsă de un sistem de forţe static echivaente care produc în secţiunea transversaă un moment încovoietor, a cărui vector este dirijat după una din axee principae ae secţiunii transversae. În cau soicitării de încovoiere simpă în secţiunea transversaă a grinii apare pe ângă un moment încovoietor şi o forţă tăietoare. De reţinut: La încovoiere, axa O se consideră poitivă în jos datorită faptuui că majoritatea forţeor exterioare (sarcini) provin din greutăţi şi sunt orientate în această direcţie. Depasărie în sensu axei O sunt considerate poitive. În cau încovoierii pure în secţiunea barei apare numai unu din eforturie sau (preenţa simutană a eforturior şi se produce în cau soicitării compuse a încovoiere obică, care urmeaă să fie studiată în cursu de Reistenţa materiaeor II ). 37
38 Pentru demonstrarea reaţiei de cacu a tensiunior normae (formua ui Navier) s-a considerat o grindă supusă a încovoiere pură (momentu încovoietor fiind constant pe ungimea grinii: ( x) const., iar toate ceeate eforturi sunt nue). S-a considerat că materiau grinii este omogen şi iotrop, cu caracteristică iniar-eastică (admite egea ui Hooke). În secţiunea grinii apar numai tensiuni normae x. care se cacueaă cu reaţia: x( ) (.7) I Egaitatea (.7) poartă numee de reaţia ui Navier. De reţinut: Reută că sistemu de axe a secţiunii transversae este unu principa centra ( este orientat după axa O, care este şi axă principaă de inerţie). compresiune min G axa neutră max tracţiune Figura.9 Deoarece în cau încovoierii pure a grinior drepte de secţiune constantă efortu este constant, reută că tensiunea x este funcţie numai de : este nuă în panu neutru, care conţine şi axa neutră ( 0) şi este maximă sau minimă pe faţa inferioară şi respectiv superioară a grinior (figura.9). În cacuee de 38
39 reistenţă intereseaă tensiunie normae x maxime şi minime, care apar în fibree cee mai îndepărtate de axa neutră. Dacă O este axă de simetrie, atunci max şi moduu de reistenţă se poate scrie: I W (.73) unde: max - distanţa de a axa O a fibra cea mai îndepărtată a secţiunii. Pentru o grindă confecţionată dintr-un materia tenace ( at ac ), cu secţiuni transversae a care O este axă de simetrie, reaţia ui Navier se utiieaă sub următoarea formă: max Dacă axa O nu este o axă de simetrie atunci: W x max (.74) W I I ;W (.75) Pentru materiae având imita de curgere a tracţiune at diferită de cea a compresiune ac, se determină atât tensiunea maximă (a tracţiune) cât şi cea minimă (a compresiune). Pentru dimensionare se vor imita atât tensiunie maxime cât şi cee minime. Vaorie raţionae pentru şi se obţin din condiţiie max at, min ac. Cu notaţiie (.75), reaţia (.74) poate fi scrisă sub forma: max min W - W at ac (.76) La încovoierea simpă, momentu variaă de obicei pe ungimea grinii. Tensiunea normaă va fi o funcţie de două variabie şi formua ui Navier poate fi rescrisă astfe: ( x ) x( x, ) (.77) I 39
40 Vaoarea momentuui (x) se determină din diagrama de moment încovoietor. Pentru efectuarea cacuui de reistenţă tensiunie maxime în modu nu trebuie să depăşească tensiunea admisibiă: (.78) x max a De reţinut: Pentru grinie de secţiune constantă, tensiunea maximă se va produce în secţiunea în care momentu este maxim (,max ). La grinie cu secţiune variabiă, tensiunea maximă se poate produce şi în ate secţiuni. Cu toate că formua ui Navier a fost dedusă pentru soicitarea a încovoiere pură, ea este utiiată, în anumite condiţii, şi pentru cacuu tensiunior normae care apar în grinie supuse a încovoiere simpă. În acest ca, este necesar ca, pe ângă condiţiie menţionate mai sus, axa O să fie axa de simetrie a secţiunii transversae iar panu xo să conţină toate forţee tăietoare (încovoiere pană). Formua ui Navier dă reutate acceptabie chiar în cau grinior ungi, care preintă o variaţie entă a secţiunii transversae pe ungimea grinii. În cau unor variaţii bruşte a secţiunii apare fenomenu concentrării tensiunior şi tensiunie maxime în modu sunt mai mari decât cee cacuate cu această formuă. În cau profieor aminate, caracteristicie geometrice W sunt indicate în tabee. Pentru cacuu de dimensionare se determină dimensiunea caracteristică a secţiunii transversae, reovând inecuaţia (.78). 40
41 Cacuu de verificare se face pentru grini a care se cunosc dimensiunie secţiunii transversae. Acest cacu constă în verificarea inegaităţii (.78). Dacă inegaitatea se verifică, grinda reistă a sarcinie propuse. În cau încovoierii simpe, în secţiunea transversaă a grinii apar atât tensiuni normae (care vor fi determinate tot cu formua ui Navier, în condiţiie preentate mai sus) cât şi tensiuni tangenţiae. Reaţia pentru cacuu tensiunior tangenţiae este: T( x ) S ( ) τ x( x, ) (.79) b( ) I unde: T (x) - forţa tăietoare din secţiunea x (se ia din diagrama de forţe tăietoare); S () - momentu static a suprafeţei afată deasupra sau sub secţiunea, faţă de axa O (care trece prin centru de greutate a secţiunii transversae); b() - ăţimea fibrei în secţiunea în care se cacueaă tensiunea tangenţiaă; I - momentu de inerţie a întregii secţiuni a grinii, faţă de axa O. Reaţia (.98) se numeşte formua ui Juravski. De reţinut: La grinie ungi (/h > 0) cu secţiune masivă, supuse a încovoiere simpă, distrugerea este provocată de către tensiunie normae. În asemenea cauri, tensiunie tangenţiae pot fi negijate. Din contră, în cau grinior scurte sau a ceor cu secţiune compusă, tensiunie tangenţiae pot avea un ro predominant în distrugerea grinii. Expresia energiei potenţiae de deformaţie, uând în consideraţie numai tensiunie normae, este data de reaţia: ( x ) U dx (.80) EI 0 unde: (x) - expresia momentuui încovoietor; - ungimea regiunii grinii; 4
42 I - momentu de inerţie axia. Expresia (.80) a energiei este vaabiă pentru o regiune a grinii. Energia potenţiaă de deformaţie a întregii grini se obţine prin însumarea agebrică a energiior cacuate pe cee n regiuni, adică: U n U i i (.8) În cau încovoierii simpe, a energia potenţiaă de deformaţie a grinii îşi aduc contribuţia atât tensiunie normae cât şi cee tangenţiae. Energia potenţiaă de deformaţie datorată tensiunior tangenţiae poate fi estimată cu reaţia: T ( x ) U k dx (.8) GA 0 unde k repreintă un coeficientu care depinde de forma secţiunii care este dat de reaţia: A S ( ) k da (.83) I b ( ) A Energia potenţiaă de deformaţie a unei grini supuse a încovoiere simpă va fi egaă cu suma agebrică a energiior date de reaţiie (.8) şi (.83). Prin urmare: U T ( x ) ( x ) dx + k dx EI GA (.84) 0 0 De reţinut: Contribuţia tensiunior tangenţiae a energia potenţiaă de deformaţie este semnificativă în cau grinior scurte. În cau grinior ungi, cu secţiuni masive această contribuţie este mică şi de obicei poate fi negijată. 4
43 Într-o secţiune oarecare starea deformată a grinii este caracteriată de următoaree mărimi geometrice (figura.0): - săgeata care repreintă depasarea v, pe direcţia axei O, a centruui de greutate a secţiunii transversae; x F ϕ A ϕ A A A v A u P P x v max f a) ρ (x) ϕ A ρ (x) F ϕ A A v A F u x b) A v max f Figura.0 - rotirea care repreintă incinarea ϕ secţiunii transversae; - depasarea u pe direcţia axei Ox (în cee ce urmeaă se negijeaă depasărie u pe direcţia axei Ox). Prin urmare prin cacuu depasărior a încovoiere se înţeege cacuu într-o secţiune oarecare. Pentru cacuu săgeţii şi a rotirii în cadru cursuui de Reistenţa materiaeor I au fost preentate mai mute metode..0. Teoreme şi metode energetice În Reistenţa materiaeor există mute metode pentru determinarea depasărior, ridicarea nedeterminărior, cacuu a soicitări compuse baate pe egea conservării energiei şi deci pe cacuu energiei de deformaţie. 43
44 Ipoteee pe baa cărora au fost demonstrate în cursu de Reistenţa materiaeor I principaee teoreme referitoare a energie precum şi metodee de cacu care fac ape a aceasta (metode energetice) sunt: - materiau este soicitat ce mut până a imita de easticitate (are o comportare perfect eastică), fiind vaabiă egea ui Hooke; - forţee exterioare sunt apicate static (vitea de deformare este foarte mică, deci energia cinetică este practic nuă); - se negijeaă efectee termice, pieoeectrice, emisiie utrasonore care însoţesc fenomenu deformaţiei corpurior, energia disipată de aceste fenomene fiind mut mai mică decât cea de deformaţie eastică; - se negijeaă frecărie interioare şi frecărie în reaeme. Vom face referire a urmatoaree teoreme pe care e vom foosi in partea a doua a cursuui de reistenta:.0.. Teoremee ui Castigiano S-a considerat un corp eastic încărcat cu un sistem de forţe concentrate F, F i, F n în echiibru. S-a presupus că forţee actioneaa independent una în raport cu ceaată. Sub acţiunea acestor forţe corpu se deformeaă şi înmagaineaă o energie potenţiaă de deformaţie egaă cu: U δ i (.85) n F i i unde: δ i depasarea punctuui i, pe direcţia forţei F i, produsă de sistemu de forţe considerat. Deoarece depasărie pot fi exprimate funcţie de forţe (vei reaţia.08), reută că energia potenţiaă de deformaţie este funcţie de forţee care soicită corpu: U f ( F...F...F ). i n După încărcarea corpuui cu sistemu de sarcini, se dă uneia dintre forte, de exempu forţei F i, o creştere infinit mică df i (figura.a). Ca urmare a acestui fapt, energia potenţiaă de deformaţie va creşte cu o cantitate infinit mică du şi energia înmagainată de către corpu eastic devine: 44
45 U U' U + du U + dfi (.86) F Se inverseaă apoi ordinea apicării forţeor, apicând mai întâi forţa df i. Punctu de apicaţie i a forţei suferă o depasare foarte mica dδ i pe direcţia forţei df i şi corpu înmagaineaă o energie de deformaţie eementară: i df i dδi (.87) Apoi, s-a apicat sistemu de sarcini F, F i, F n. Acesta va deforma corpu care va înmagaina o energie potenţiaă de deformaţie U dată de reaţia (.87). În pus forţa df i (care era a intensitatea maximă când s-a apicat sistemu de sarcini) rămâne constantă şi se depaseaă cu δ i (figura.b). Energia înmagainată de către corp, în acest ca, va fi: U'' U + dfi dδi + dfi δi (.88) df i F i i F i δ i n F i df i dδ i n F dδ i δ i F F a) b) Figura.. Dar vaoarea energiei potenţiae de deformaţie nu depinde de ordinea apicării forţeor, deci U U. Egaând reaţiie (.86) şi (.88) reută: U U + F i df i U + dfi dδi + dfi δi (.89) 45
46 După efectuarea reducerior şi negijarea infinituui mic de ordinu a doiea reută: U F i δ i (.90) Reaţia (.90) repreintă expresia primei teoreme a ui Castigiano, care se enunţă astfe: derivata parţiaă a energiei potenţiae de deformaţie înmagainată de către un corp eastic, în raport cu o forţă concentrată este numeric egaă cu depasarea punctuui de apicaţie a forţei, în sensu şi pe direcţia forţei. Dacă se consideră corpu eastic încărcat cu un sistem de momente concentrate, s-a demonstrat, în mod simiar, următoarea reaţie, care repreintă a doua teoremă a ui Castigiano: U i φ i (.9) Enunţu teoremei este: derivata parţiaă a energiei de deformaţie, în raport cu un moment concentrat, este numeric egaă cu rotirea punctuui de apicaţie a momentuui în sensu de rotire a acestuia. De reţinut: Depasarea δ i dată de reaţia (.90) are oc în sensu forţei F i dacă reută poitivă şi în sens contrar forţei dacă reută negativă. Rotirea ϕ i dată de reaţia (.9) are oc în sensu momentuui i dacă este poitivă şi în sens contrar dacă este negativă. Teoremee ui Castigiano pot fi apicate a cacuu sistemeor static nedeterminate..0.. etoda axwe-ohr pentru determinarea derivateor eforturior S-a considerat că expresia momentuui încovoietor dintr-o secţiune curentă a unei grini, soicitată de un sistem de sarcini concentrate, este scris sub următoarea formă: 46
47 ( x) i +... n + F b F j b j Fm bm (.9) unde: n - momentee concentrate care soicită grinda; F F m - forţee concentrate care sunt apicate pe grindă; b b m - braţee forţeor. Dacă se deriveaă funcţia (x) în raport cu F j şi i se obţine: F ( x) ( x) j b j ; i (.93) Aceeaşi reaţii se obţin dacă se egaeaă cu unitatea sarcina în raport cu care se face derivarea şi se anueaă toate ceeate sarcini. Astfe, dacă se consideră succesiv că i, respectiv F i şi toate ceeate momente şi forţe concentrate se fac ero se obţine: respectiv: ( x) ( x) i ( x) ( x) b j F j m( x) m( x) (.94) (.95) S-au introdus în cursu de Reistenţa materiaeor I următoaree notaţii: (x) - momentu încovoietor în secţiunea x, pentru încărcarea corpuui cu sarcinie reae; m(x) - momentu încovoietor fictiv, determinat în aceeaşi secţiune x, cu toate sarcinie nue, cu excepţia ceei în raport cu care se face derivarea, care este egaă cu unitatea. parţiaă, deci: sau Determinat în aceste condiţii, momentu fictiv m(x) este ega cu derivata m m ( x) ( x) F ( x) i ( x) j (.96) 47
48 etoda ohr-axwe poate fi apicată simiar şi pentru ceeate eforturi: forţe axiae, forţe tăietoare şi momente de răsucire. În acest ca s-au introdus notaţiie: n t ( x) ( x) N F ( x) i T F ( x) t ( x ) m t ( x ) F i ; ; i (.97) n(x), t(x), m(x), m t (x) se numesc coeficienţi de infuenţă şi repreintă eforturie secţionae într-o secţiune curentă cauate de o sarcină egaă cu unitatea, având aceaşi punct de apicaţie şi aceeaşi direcţie ca şi sarcina în raport cu care se face derivarea. Sarcina unitară se apică singură pe corp într-o a doua stare de soicitare în care toate ceeate sarcini se anueaă. Practic reaţiie stabiite arată că derivatee parţiae repreintă eforturie secţionae cauate de o sarcină egaă cu unitatea, apicată singură pe corp în ocu sarcinii în raport cu care se face derivarea. De reţinut: Raţionamentu anterior este vaabi şi în cau în care pe grinda sunt apicate şi sarcini distribuite. etoda axwe-ohr simpifică cacuu derivateor parţiae ae eforturior dintr-o secţiunea curentă a corpuui în raport cu o forţă concentrată sau un moment concentrat etoda ohr-vereşceaghin Cacuu unor integrae de tipu: ( x ) m( x ) dx, N ( x ) n( x ) dx, etc. se poate face anaitic dar, în unee situaţii, cacuu poate fi simpificat prin apicarea metodei de integrare grafo-anaitică ohr-vereşceaghin, denumită şi metoda de înmuţire a diagrameor. etoda este apicabiă tuturor integraeor, 48
49 care conţin un produs de două funcţii continue, dintre care una este o funcţie iniară. Deoarece toate integraee sunt identice ca structură, se va face în continuare referire a integraa ( x ) m( x ) dx. În genera (x) este o funcţie oarecare. Funcţia m(x) este momentu încovoietor dat de către un moment concentrat sau o forţă concentrată unitară şi în consecinţă poate fi constantă sau poate avea ce mut o variaţie iniară. Se repreintă în figura. diagramee de variaţie a momenteor încovoietoare, atât pentru încărcarea dată, cât şi pentru sarcina unitate, m. Prima diagramă de momente este deimitată de o curbă oarecare, iar a doua de o inie dreaptă. S-a preentata în prima parte a cursuui modu cum se cacueaă integraa: I ( x ) m( x ) dx (.98) A da G x m x (x) dx x G α m(x) x m(x G ) Figura.. În figura. din prima diagramă reută: iar din diagrama m reută: ( x) dx da (.99) m ( x) x tgα (.00) 49
50 Înocuind (.00) şi (.99), reaţia (.98) devine: I tgα xda tgα S (.0) A unde: S - momentu static a suprafeţei diagramei faţă de axa ordonateor, care poate fi scris: S x A (.0) unde: A aria diagramei ; x G - abscisa centruui de greutate a diagramei. Înocuind (.0) în reaţia (.0) reută: I xg tgα A (.03) Din figura. se poate scrie: G ( ) x tgα m (.04) G x G Înocuind (.04) în (.03) şi ţinând cont de reaţia (.99) se obţine: I ( x ) m( x )dx A m( x G ) (.05) Pe această reaţie se baeaă metoda ohr-vereşceaghin. Reaţia (.05) arată că integraa definită din produsu funcţiior (x) m(x) este numeric egaă cu produsu dintre suprafaţa diagramei (x), uată între imitee de integrare, şi vaoarea funcţiei m(x), cacuată în dreptu centruui de greutate a primei diagrame. De reţinut: În cau în care şi diagrama (x) este iniară rou ceor două diagrame poate fi inversat. etoda de integrare grafo-anaitică ohr-vereşceaghin se apică pentru fiecare porţiune a sistemuui de bare, atât pentru soicitarea de încovoiere cât şi pentru ceeate soicitări. 50
51 ..8. etoda eforturior Pentru un corp eastic de n ori static nedeterminat, încărcat cu un sistem oarecare de sarcini (figura.a), se înocuiesc n reaeme cu reacţiunie care apar în ee X X n, astfe încât sistemu să devină static determinat. Sistemu astfe obţinut (figura.b) se numeşte sistem de baă. ai întâi se studiaă sistemu de baă încărcat numai cu sarcinie exterioare, necunoscutee static nedeterminate fiind nue (X X n 0). Pentru această variantă de încărcare se noteaă cu δ i0 depasarea punctuui de apicare a forţei X i, pe direcţia acesteia, cu i n. Se studiaă apoi sistemu de baă fără sistemu de sarcini exterior, dar încărcat pe rând numai cu câte una din necunoscutee static nedeterminate, care devine egaă cu unitatea. În acest ca se noteaă cu δ i δ ii δ ni depasărie puncteor de apicaţie ae necunoscuteor static nedeterminate, pe direcţia acestora pentru X i. Ca urmare a proporţionaităţii dintre sarcini şi deformaţii, reută că depasărie produse de către sarcina reaă X i, care acţioneaă singură asupra sistemuui de baă, vor fi: δ i X i,, δ ii X i, δ ji X i,, δ ni X i. Într-un punct j depasărie produse de către cee n necunoscutee static nedeterminate vor fi: δ j X δ jn X n. Depasărie punctuui j, pe direcţia necunoscutei X j, atunci când necunoscuta considerată egaă cu unitatea este apicată succesiv în punctee n, vor fi: δ j δ jn. Apicând principiu suprapunerii efecteor, se determină depasarea punctuui j sub acţiunea simutană a tuturor necunoscuteor static nedeterminate X X n : δ ' δ X + δ X δ X (.06) j j j Dar punctu j se afă a contactu cu un reaem rigid şi prin urmare depasarea sa totaă (suma agebrică a tuturor depasărior din acest punct) trebuie să fie nuă, deci: δ + δ X δ X + δ 0 (.07) j X j jn n j0 jn n 5
52 Reaţii simiare se pot scrie pentru toate ceeate reaeme. Se obţine astfe următoru sistem: δ... δ n X X + δ + δ n X X δ δ n nn X X n n + δ + δ 0 n0 0 (.08) 0 Sistemu obţinut este format dintr-un număr de ecuaţii ega cu număru necunoscuteor static nedeterminate şi repreintă sistemu de ecuaţii canonice foosit de metoda eforturior. E poate fi scris astfe indiferent de forma corpuui sau a sistemuui de corpuri şi prin reovarea ui se determină vaorie necunoscuteor static nedeterminate X X n. Cacuu necesită determinarea preaabiă a coeficienţior de infuenţă δ ij (care repreintă depasări fictive) şi a termenior iberi. Pentru aceasta se fooseşte metoda ohr-axwe sau în cau sistemeor formate din bare drepte metoda ohr-vereşceaghin. Coeficienţii de infuenţă δ ij, pentru care ij se numesc principai şi aceştia sunt întotdeauna poitivi. Cei pentru care i j poartă denumirea de secundari şi pot fi poitivi, negativi sau egai cu ero. Ca o consecinţă a teoremei reciprocităţii depasărior, în sistemu (.43), se poate scrie: δ δ. Pentru un corp încărcat cu sarcini şi supus a diatări termice împiedicate (acestea produc tensiuni în corp) sistemu (.43) devine: δ... δ n X X + δ + δ n X X δ δ n nn X X n n + δ + δ 0 n0 + δ t + δ nt 0 ij ji (.09) 0 unde: δ t δ nt - depasărie fictive produse de către temperatură în punctee n ae sistemuui de baă, pe direcţia necunoscuteor X X n. În cau sistemeor pane, a care se negijeaă infuenţa forţei tăietoare, coeficienţii şi termenii iberi ai sistemuui (.44) pot fi determinaţi cu următoaree reaţii: 5
53 δ δ δ ij i0 it i i i i i i m m i i EI i o EI j m i dx j i n α t dx dx i + i i + nin j dx i EA i N o n EA j dx i (.0) unde: o, N o - momentu încovoietor şi forţa axiaă produse în sistemu de baă de către sarcinie exterioare; m i, n i - momentu încovoietor şi forţa axiaă atunci când sistemu de baă este încărcat numai cu X i. 53
54 CAPITOLUL ELEENTE DE TEORIA ELASTICITĂŢII Probema generaă a teoriei easticităţii o repreintă determinarea stării de tensiuni, deformaţii şi depasări dintr-un corp eastic, atunci când se cunosc: forma şi dimensiunie acestuia, modu de încărcare şi reemare, precum şi caracteristicie eastice ae materiauui. Ecuaţiie fundamentae ae Teoriei easticităţii (care vor fi preentate în cee ce urmeaă) sunt scrise pentru un eement de voum infiniteima şi sunt grupate astfe: ecuaţii de echiibru (Cauch); ecuaţii geometrice (reaţii între deformaţii si depasări); ecuaţii constitutive (egea ui Hooke). În ecuaţiie din primee două grupe nu intervin caracteristici de materia şi, în consecinţă, ee sunt universa vaabie. În ecuaţiie constitutive intervin aceste caracteristici şi prin urmare acestea depind de natura materiauui. 54
55 odeu casic a Teoriei easticităţii şi Reistenţei materiaeor adecvat comportării oţeuui şi ator materiae (în specia metaice) are a baă următoaree ipotee simpificatoare: continuitatea materiei; omogenitatea; easticitatea perfecta şi iotropia materiaeor; ipotea deformaţiior mici; proporţionaitatea dintre tensiuni şi deformaţii; principiu ui Saint Venant; ipotea stării naturae. Ipotea ui Bernoui este admisă numai în Reistenţei materiaeor... Starea de tensiuni într-un punct a unui corp... Starea generaă de tensiuni Se consideră cau genera a unui corp soid soicitat de un sistem oarecare de sarcini. Într-un punct oarecare din interioru corpuui se poate duce un număr nedefinit de faţete orientate diferit. La fiecare din aceste faţete eementare corespunde un anumit vector-tensiune p r (figura.). C p d d O dx τ B x A Figura.. 55
56 Ansambu vectorior tensiune care acţioneaă pe faţetee eementare ce trec prin punctu considerat caracterieaă starea de tensiune din acest punct şi poartă denumirea de fascicou tensiunior. Ansambu fascicoeor tensiunior într-un voum poartă denumirea de câmp de tensiune. Câmpu de tensiune poate fi uniaxia, biaxia, triaxia. S-au definit în cursu de Reistenţa materiaeor: - tensiunea medie pe un eement de arie A ; - tensiunea într-un punct a corpuui, care poate fi descompusă (figura.b) în două componente: - pe direcţia normaei în componenta xx, numită tensiune normaă (orientată de direcţia axei Ox) si pe panu secţiunii în componenta τ, numită tensiune tangenţiaă. A R τ p O x da xx O x a) b) Figura.. La rându său, componenta τ se poate fi descompusă în panu O, (a care Ox este normaă) obţinându-se componentee τ x şi τ x (figura.3) care sunt paraee cu axee O şi respectiv O. De reţinut: Starea de tensiuni dintr-un punct oarecare a corpuui este perfect determinată dacă se cunosc tensiunie pe trei pane de coordonate care trec prin ace punct. Dacă poiţia paneor de coordonate este arbitrară, 56
57 pe fiecare dintre aceste pane există, în cau genera, atât tensiuni normae cât şi tensiuni tangenţiae. τ τ x τ x da O xx x p Figura.3. Din interioru unui corp soid eastic afat în echiibru, într-o stare generaă de tensiuni, se ioeaă un paraeipiped eementar infiniteima de dimensiuni dx, d, d (figura.4.). Paraeipipedu se raporteaă a un sistem de axe triortogona. Figura.4. În figura.4. se preintă starea spaţiaă de tensiuni. Toate tensiunie preentate sunt poitive. Cunoaşterea ceor 9 componente ae tensiunior în orice punct a unui corp înseamnă cunoaşterea stării de tensiuni din ace corp. Aceasta este starea generaă de tensiuni. Rareori toate aceste tensiuni apar simutan. 57
 τ x τ Semnificaţia indicior este următoarea: primu indice indică normaa a faţeta pe care acţioneaă tensiunea, iar a doiea axa cu care aceasta este paraeă.")
58 Tensiunea este o mărime tensoriaă. Componentee tensoruui tensiunior pentru starea generaă de tensiuni pot fi preentate în formă matriceaă astfe: xx τ x τ x T τ x τ (.) τ x τ Semnificaţia indicior este următoarea: primu indice indică normaa a faţeta pe care acţioneaă tensiunea, iar a doiea axa cu care aceasta este paraeă. Fascicou tensiunior într-un punct poate fi repreentat printr-un tensor de ordinu trei, pe care î vom denumi tensor-tensiune. Datorită proprietăţii de duaitate a tensiunior tangenţiae (τ x τ x, τ τ, τ x τ x ) componentee tensoruui tensiunior dispuse simetric faţă de diagonaa principaă a tensoruui sunt egae între ee ceea ce ne permite să denumim tensoru tensiunior, tensor simetric de ordinu a doiea. Starea de tensiuni dintr-un punct a corpuui este determinată dacă se cunosc tensiunie pe trei pane de coordonate care trec prin ace punct. În fiecare punct a unui corp există trei pane pentru care tensiunie tangenţiae τ sunt nue, numite pane principae. Tensiunie de pe aceste pane se numesc tensiuni (normae) principae (,, 3 ). Intersecţia paneor principae formeaă axee numite direcţiie principae ae tensiunior (figura.5.). Se vor foosi următoaree notaţii pentru tensiunie principae: 3 Figura.5. 58


59 tensiunie fiind ordonate agebric.... Starea pană şi uniaxiaă de tensiuni Din starea generaă de tensiuni pot fi determinate următoaree cauri particuare:. Starea pană de tensiuni (figura.6) Pentru această stare: 0, τ x τ x 0, τ τ 0. Pe faţetee opuse acţioneaă tensiuni egae şi de sensuri contrare. Figura.6. În figura.7 este repreentată starea de tensiuni principae în pan. Figura.7.. Starea uniaxiaă de tensiuni (tracţiune pe direcţia axei Ox (figura.8)). 59
.")
60 Figura.8... Variaţia tensiunior în juru unui punct. Tensiuni principae.. Starea spaţiaă de tensiuni Tensiunie principae repreintă cea mai simpă stare de tensiune dintr-un punct a unui corp. În fiecare punct a unui corp există trei pane pentru care tensiunie tangenţiae τ sunt nue, numite pane principae, iar tensiunie de pe aceste pane se numesc tensiuni principae (,, 3 ). Intersecţia paneor principae formeaă axee numite direcţiie principae ae tensiunior. În starea spaţiaă de tensiuni direcţiie tensiunior principae respectiv 3, dintr-un punct, (notate cu şi 3) sunt reciproc perpendicuare. Direcţia este perpendicuară pe panu O3 astfe încât, împreună cu ceeate două, formeaă un sistem triortogona drept. Tensiunie principae sunt ordonate agebric, prin urmare între tensiuni există reaţia: > > (.) 3 60
61 Observaţii: În starea spaţiaă de tensiuni toate cee trei tensiuni principae sunt diferite de ero. Tensiunie normae principae sunt independente a schimbarea sistemuui de coordonate. În panee principae tensiunie tangenţiae sunt nue. Cee trei pane principae dintr-un punct a corpuui deformat sunt reciproc perpendicuare. Intersecţia paneor principae determină axee sau direcţiie principae. Într-un corp eastic, omogen şi iotrop direcţiie principae sunt reciproc perpendicuare. Direcţiie principae se bucură de proprietatea că ee coincid cu normaee feţeor pe care tensiunea tangenţiaă este nuă. Prin raportare a acest sistem de referinţă, se obţin expresiie cee mai simpe pentru tensiuni care repreintă rădăcinie reae şi distincte ae ecuaţiei: 3 I I - I 0 (.3) Reaţia (.8) se numeşte ecuaţie secuară, iar coeficienţii,, I se numesc invarianţi deoarece nu se modifică a rotirea sistemuui de axe., I şi I 3 se determină cu reaţiie: I I 3 I I + + (.4) xx I xx τ x τ xx τ x + + (.5) τ τ τ x x I 3 τ xx x x τ τ x τ x τ τ (.6) În reaţii determinanţii sunt simetrici faţă de diagonaa principaă. 6
62 Observaţii: Tensiunea principaă cea mai mare este totodată şi cea mai mare posibiă dintre tensiunie ce acţioneaă asupra eementuui studiat, iar tensiunea principaă minimă 3 este cea mai mică din ansambu tensiunior. O condiţie necesară în cau stării spaţiae de tensiune (triaxiaă) este ca invariantu I 3 a ecuaţiei secuare să fie diferit de ero. Un mode geometric a acestei stări de tensiune este eipsoidu ui Lamé sau eipsoidu tensiunior (figura.0): starea de tensiune dintr-un punct a unui corp poate fi repreentată printr-un eipsoid care are ca semiaxe tensiunie normae principae şi a cărui ecuaţie este: px p + p + 3 P 3 O P x P Figura.0...Starea pană de tensiuni (biaxiaă) În această stare de tensiuni două dintre tensiunie principae sunt diferite de ero, iar a treia 3 este nuă. În acest ca suprafaţa eipsoiduui tensiunior se transformă în suprafaţa unei eipse numită eipsa tensiunior. O condiţie necesară pentru starea pană de tensiuni este ca ce de a doiea invariant I să 6
63 fie diferit de ero, iar ce de a treiea invariant I 3 să fie ega cu ero. Prin urmare ecuaţia secuară (.3) devine: [ - + I ] 0 (.7) I cu una dintre rădăcinie egaă cu ero. Dintr-un corp, afat într-o stare pană de tensiuni, se decupeaă o prismă triunghiuară infiniteimaă (se secţioneaă corpu cu un pan încinat) aşa cum este indicat în figura.. Figura.. Se pune probema determinării expresiior pentru tensiunie şi τ precum şi a tensiunior principae în funcţie de unghiu θ atunci când se cunosc componentee xx, şi τ x ae tensoruui tensiunior pe feţee AO şi OB perpendicuare pe panu desenuui, având ca normae pe Ox şi O (figura.). Se scrie echiibru tensiunior care acţioneaă asupra acestui eement şi se obţine: ( θ ) τ cos θ + sin θ + τ sinθ cosθ ( θ ) τ ( cos θ sin θ ) + ( ) sinθ cosθ x xx x xx (.8) 63
64 şi reută: Figura.. Se exprimă reaţiie în funcţie de argumentu dubu cunoscând: cos cos + θ cos θ ; sin θ sin θ θ ; sinθ cosθ ; xx + xx - ( θ ) + cos θ + τ x sin θ (.9) xx - τ( θ ) - sin θ + τ x cos θ (.0) Reaţiie (.9), (.0) dau variaţiie tensiunior şi τ în funcţie de unghiu θ ce poate varia în intervau [0,π]. Se doreşte determinarea vaorior extreme. Pentru aceasta se deriveaă reaţia (.0) în raport cu θ şi se anueaă derivata. Se obţine: d( θ ) xx - - sin θ + τ x cos θ (.) d( θ ) Din reaţiie (.0), (.) se observă că: d( θ ) τ ( θ ) (.) d( θ ) Prin urmare tensiunea normaă (funcţia (θ ) ) preintă un punct de extrem (avem tensiuni principae) atunci când τ ( θ ) 0. Pentru starea pană de tensiuni, tensiunie principae sunt: xx +, ± ( xx - ) + 4τ x (.3) 64
65 unde semnu (+) este pentru, deci max şi min. Din reaţia (.3) se observă că xx + + constant deci într-un punct dat suma tensiunior normae în raport cu direcţiie principae este constantă. Egaând cu ero expresia ui τ din reaţia (.) se obţine: xx - τ x tgθ deci direcţiie principae sunt date de souţiie ecuaţiei: tgθ, τ x (.4) - xx Observaţii: Direcţiie principae sunt reciproc perpendicuare (deoarece perioada funcţiei este π ). Dacă tensiunie tangenţiae sunt poitive, direcţia tensiunii normae maxime se afă în primu cadran şi se măsoară în sens trigonometric. Pentru tensiuni tangenţiae negative, această direcţie se afă a un unghi negativ şi ascuţit faţă de axa Ox Panee normae a direcţiie principae se numesc pane principae. Pentru materiaeor iotrope, direcţiie tensiunior principae coincid cu cee ae deformaţiior principae. Direcţiie tensiunior tangenţiae extremae se determină din condiţia dτ ( θ ) 0. Se constată că tensiunie tangenţiae extreme apar în pane încinate d( θ ) a 45 faţă de direcţiie principae. Tensiunie tangenţiae maxime şi minime sunt date de reaţiie: sau τ ( x ) + τ x - (.5) max, min ± 4 65
66 τ max,min - ± (.6) cu τ max τ şi τ min τ. Reaţia (.6) arată că cee două tensiuni tangenţiae sunt egae dar de sensuri contrare, ceea ce indică faptu că se respectă duaitatea tensiunior tangenţiae. În secţiunie în care tensiunie tangenţiae au vaori extreme, tensiunie normae sunt diferite de ero. Un mode geometric a stării pane de tensiune este eipsa ui Lamé (figura.3): o eipsă cu semiaxa mare egaă cu şi semiaxa mică egaă cu şi a cărei ecuaţie este: px p + (.7) Într-un punct oarecare B tensiunea p, afată sub unghiu θ, se decompune în componentee p x si p. P p B O P x x Figura.3. Funcţiie (θ ) şi τ (θ ) din reaţiie (.9), (.0) pot fi preentate grafic în coordonate carteiene, în coordonate poare (cea mai sugestivă) şi prin în cercu ui ohr. Cea mai comodă este repreentarea grafică prin cercu ui ohr, în sistemu de coordonate, τ. În sistemu axeor principae reaţiie (.9), (.0) pot fi scrise sub forma: 66
67 + ( θ ) + cos θ - τ( θ ) - - sin θ Se ridică a pătrat şi se adună utimee două reaţii reutând: τ (.8) Reaţia (.8) repreintă matematic ecuaţia cercuui ui ohr pentru starea pană de tensiune. Este un cerc cu centru pe axa, a distanţa de origine şi de raă - (figura.4). + Orice stare pană de tensiuni se repreintă printr-o pereche de puncte diametra opuse de pe cerc. τ xx q θ p τ x τ max τ min p Figura Starea iniară de tensiuni (monoaxiaă) Condiţia necesară pentru a exista o stare de tensiune monoaxiaă este ca a doiea şi a treiea invariant a tensiunior să fie egai cu ero. În acest ca ecuaţia secuară devine: [ I ] 0 - (.9) cu două rădăcini egae cu ero. Pentru starea de tensiune monoaxiaă eipsoidu tensiunior se transformă într-un segment de dreaptă. 67
68 Starea monoaxiaă de tensiune este produsă de soicitărie axiae. În acest ca numai tensiunea normaă xx este diferită de ero. Pentru studiu variaţiei tensiunior în juru unui punct se păstreaă modu de secţionare de a starea pană de tensiuni. Se figureaă tensiunie care apar şi se scrie echiibru eementuui ioat: ( θ ) xx cos τ( θ ) - xx θ sinθ cosθ sau exprimând reaţiie în funcţie de argumentu dubu reută: xx ( θ ) ( + cos θ ) (.0) xx τ( θ ) - sin θ (.) Se pune probema stabiirii vaorior unghiuui θ pentru care cee două tensiuni sunt maxime sau minime. Astfe tensiunea normaă este maximă pentru cosθ deci pentru θ 0, respectiv θ 0 (pentru normaa pe direcţia forţeor). Vaoarea minimă se obţine pentru cosθ - sau θ π respectiv θ π/ deci pentru secţiunea paraeă cu direcţia forţeor. Tensiunie principae sunt: max min 0 xx (.) Tensiunea tangenţiaa are vaoarea maximă pentru sinθ sau θ π/ respectiv θ π/4. Vaoarea tensiunii este: xx τ max (.3) Observaţii: La soicitărie axiae în secţiunie încinate apar atât tensiuni normae cât şi tensiuni tangenţiae. Tensiunie tangenţiae maxime se obţin în secţiuni încinate a 45 o faţă de axa barei şi sunt egae cu jumătatea efortuui norma principa. 68
69 Dacă în reaţia (.8) se face ero reută: ) + τ ( - (.4) Reaţia (.4) repreintă cercu ui ohr pentru soicitarea monoaxiaă: un cerc cu centru pe axa, care trece prin origine şi are raa / (figura.5). τ O θ τ Figura.5. Vaorie tensiunior şi τ pentru orice secţiune diferită de unghiu θ sunt date de coordonatee puncteor de pe periferia cercuui (de exempu punctu )..3. Starea de deformaţii într-un punct a unui corp.3.. Starea generaă de deformaţii Prin deformaţie se înţeege modificarea distanţei dintre puncte sau secţiuni, sau a unghiurior dintre două segmente duse printr-un punct. Prin stare de deformaţie tridimensionaă sau spaţiaă se înţeege deformarea unui corp soid oarecare. Se spune că un corp este deformat când poiţiie reative ae puncteor acestui corp au variat. Variaţia reativă a puncteor unui corp deformat se traduce prin depasări, variaţii de ungime şi unghi. odificărie ungimior segmenteor se numesc deformaţii iniare, iar modificărie unghiurior deformaţii unghiuare 69
70 sau unecări. Se consideră că deformaţiie corpuui sunt deformaţii eastice mici adică deformaţiie corpuui dispar după înăturarea sistemuui de sarcini (corpu revine a forma şi dimensiunie iniţiae) şi sunt foarte mici în raport cu dimensiunie corpuui. În prima parte a cursuui de Reistenţa materiaeor au fost definite deformaţiie. S-a considerat un corp soid şi punctee C, D din interioru corpuui care determină segmentu [CD]. Punctee, O, N determină segmentee [O] şi [ON] astfe încât între acestea să există un unghi drept (figura.6). După deformarea corpuui punctee se depaseaă în C, D,, N şi O. S-a definit ca fiind deformaţie iniară absoută variaţia ungimii segmentuui [CD]: δ [ C' D' ] - [ CD ] - S-a definit deformaţia iniară specifică sau aungirea specifică (aungirea unităţii de ungime) ca fiind imita raportuui dintre deformaţia iniară absoută şi ungimea iniţiaă a segmentuui [CD]: 0 F i F C C D D N O N O F n Figura.6 sau ε ε im [ CD ] 0 δ im [ C' D' ] - [ CD ] [ CD ] - im 0 0 S-a definit deformaţia unghiuară sau unecarea specifică ca fiind mărimea cu care variaă unghiu drept construit în vecinătatea punctuui O
71 Totaitatea componenteor definesc tensoru deformaţiior specifice într-un punct a corpuui. Componentee tensoruui deformaţiior, corespunător tensiunior de mai sus (pentru starea generaă de tensiuni), pot fi scrise matricea astfe: ε xx γ x γ x Tε γ x ε γ (.5) γ x γ ε Cunoaşterea ceor 9 componente ae deformaţiior în orice punct a unui corp înseamnă cunoaşterea stării de deformaţii din ace corp. Observaţii: Deformaţiie specifice, a fe ca şi tensiunie, sunt mărimi ocae, determinate în vecinătatea unui punct. Pentru materiae iotrope unecărie specifice nu depind de sensu deformării (de a axa Ox spre O sau invers) şi în consecinţă matricea componenteor tensoruui deformaţiior (reaţia.35) este simetrică fată de diagonaa principaă. Tensiunior normae e corespund aungiri specifice ε, iar tensiunior tangenţiae τ unecări γ. La materiaee iotrope nu există infuenţe reciproce între aungirie specifice ε şi unecărie γ. Nu există o coincidenţă între starea de tensiune şi starea de deformaţie. Astfe, a o stare de tensiune monoaxiaă corespunde o stare de deformare triaxiaă şi invers. De exempu în cau întinderii bareor de secţiune constantă, în secţiunea transversaă apare o tensiune x şi corespund aungiri specifice ε pe toate cee trei direcţii. În orice punct a corpuui deformat există trei axe reciproc perpendicuare, numite axee deformaţiior principae, pentru care componentee deformaţiei 7
72 unghiuare γ sunt nue. Unghiurie dintre aceste axe nu se modifica în urma deformării. Cee trei pane perpendicuare definite de aceste axe se numesc panee principae ae deformaţiei. Deformaţiie pe direcţiie principae ae deformaţiior au vaorie ε, ε, ε 3. Luâd direcţiie principae ca axe tensoru deformaţiior devine: ε 0 0 ε 0 ε 0 (.6) 0 0 ε 3 T Ca reutat a soicitării corpurie se deformeaă şi apar depasări. Prin depasare se înţeege modificarea poiţiei unui punct sau a unei secţiuni a corpuui. Se iau în consideraţie numai depasări eastice sau easto-pastice produse ca urmare a deformării corpuui, atunci când acesta îşi modifică dimensiunie şi forma geometrică iniţiaă. Observaţii: A cunoaşte starea de depasări dintr-un corp însemnă să se cunoască componentee depasării în orice punct a corpuui. Vectoru depasărior unui punct are componentee u (pe Ox), v (pe O) şi w (pe O)..3.. Variaţia deformaţiior în juru unui punct Deformaţiie specifice ca şi tensiunie pot varia în juru unui punct. Variaţia deformaţiior în juru unui punct se exprimă prin următoaree reaţii, simiare ceor stabiite a tensiuni: ε xx + ε ε( θ ) γ ( θ ) ε xx -ε - ε xx -ε γ + cos θ + γ x sin θ + cos θ x sin θ (.7) În orice punct a corpuui deformat există trei axe reciproc perpendicuare, numite axee deformaţiior principae, pentru care componentee deformaţiei 7
73 unghiuare γ sunt nue. Unghiurie dintre aceste axe nu se modifică în urma deformării. Cee trei pane perpendicuare definite de aceste axe se numesc panee principae ae deformaţiei. Observaţie: Pe cee trei direcţii principae de deformaţii aungirie specifice au vaorie ε, ε, ε 3, iar unecărie specifice sunt nue. ae ecuaţiei: Pentru starea spaţiaă deformaţiie principae pot fi determinate ca rădăcini 3 J 3 ε - ε + J ε - J 0 (.8) Invarianţii, şi pot fi determinaţi din, şi I, daţi de reaţiie J J J 3 I I 3 (.9), (.0), (.), în care se înocuiesc kk cu ε kk şi τ ij cu γ ij. Pentru materiae iotrope, direcţiie deformaţiior şi tensiunior principae coincid, iar deformaţiie principae sunt date de reaţiie: ε xx + ε ε xx -ε γ x, ε ± + Lunecarea maximă se determină cu reaţia: (.9) γ max,min ε -ε ε xx -ε γ x ± ± + (.30) Ca şi în cau tensiunior, variaţia deformaţiior în juru unui punct poate fi preentată în coordonate carteiene, poare sau prin cercu ui ohr pentru deformaţii (cercu se traseaă în coordonatee ε şi γ ). Dacă se repreintă cercurie tensiunior şi ce a deformaţiior suprapuse, se constată că ee sunt concentrice şi raportu diametreor este: D ε + ν D -ν 73
74 .4. Ecuaţiie fundamentae ae Teoriei Easticităţii Sub acţiunea unui sistem de sarcini corpu se deformeaă. Se pune probema să se determine noua formă uată după deformare şi tensiunie care au uat naştere în corpu respectiv. Ecuaţiie fundamentae ae Teoriei easticităţii pot fi grupate astfe:. ecuaţii de echiibru (Cauch);. ecuaţii geometrice (reaţii între deformaţii si depasări); 3. ecuaţii constitutive (egea ui Hooke). Ecuaţiie fundamentae ae Teoriei easticităţii sunt scrise pentru un eement de voum infiniteima. În ecuaţiie din primee două grupe nu intervin caracteristici de materia şi, în consecinţă, ee sunt universa vaabie. În ecuaţiie constitutive intervin aceste caracteristici şi deci acestea depind de natura materiauui..4.. Ecuaţii de echiibru (Cauch) Aceste ecuaţii au a baă echiibru de forţe, nu fac ape a caracteristici fiice şi prin urmare sunt vaabie pentru orice materia. Dintr-un corp cu grosimea egaă cu unitatea se ioeaă un eement cu dimensiunie dx, d (figura.7). Eementu trebuie să se afe în echiibru. Se scriu ecuaţiie de echiibru uând în consideraţie forţee reutate din tensiuni precum şi forţee masice ae căror componente pe unitatea de voum se noteaă cu X şi Y. Pe panee ce cuprind axee Ox şi O apar tensiunie xx,, τ x şi τ x. Dând creşteri infiniteimae tensiunior de pe feţee opuse ae eementuui de voum şi scriind echiibru forţeor se obţine: 74
75 C + j j j τx + B jτ j x j τ jt x x + x jx j xx G j xx xx+ x jx j d τ x O A x τ x dx Figura.7 - proiecţie pe oriontaă: τ x x x d + x + dx d τ x + d dx τ x dx + X dx d 0 x - proiecţie pe verticaă: τ x dx + + d dx τ x + dx d τ x d + Y dx d 0 x Se împart reaţiie prin dx d se desfac paranteee şi se reduc termenii asemenea. Se obţine: x τ x x xx τ + x + + X 0 (.3) + Y 0 Prin generaiarea reaţiior (.3) se obţin ecuaţiie diferenţiae de echiibru pentru starea generaă de tensiuni: x τ x x τ x xx x τ + x + τ + τ + + x τ + + X 0 + Y 0 (.3) + Z 0 75
76 Din a treia ecuaţie de echiibru (o sumă de momente faţă de centru G a eementuui) reută: dx τ x dx d τ x d τ d + x dx d + x dx + x d dx τ + x τ τ + dxd Împărţind ecuaţia prin şi apoi făcând dx 0,d 0 se obţine: x τ x τ x În mod simiar pentru starea generaă de tensiuni se foosesc egaităţie: τ τ τ x x τ τ τ x x Ecuaţiie (.33) exprimă principiu duaităţii tensiunior tangenţiae. (.33) Ecuaţii geometrice (între deformaţii şi depasări) Ca reutat a soicitării corpurie se deformeaă şi apar depasări. Se vor stabii reaţii geometrice între deformatiie specifice ε, şi componentee depasării voumuui eementar u, v, w, ecuaţii vaabie pentru orice materia. Pentru uşurinţă demonstraţia se va face pentru cau stării pane de deformaţii. Prin stare pană de deformaţie se înţeege starea a care au oc deformaţii numai într-un singur pan (de exempu deformaţiie ε xx, ε, γ x în panu xo). Sub acţiunea forţeor exterioare eementu din figura.8 se deformeaă (îşi modifică ungimea aturior precum şi unghiu iniţia drept dintre feţee acestuia). Întrucât studiu deformaţiior, pe care e obţine eementu de voum în ansambu, este o probemă dificiă se preferă să se studiee separat deformaţiie proiecţiior acestuia pe panee de coordonate. Se anaieaă proiecţia OABC a eementuui de voum paraeipipedic în panu xo, înainte şi după depasare, respectiv deformarea acestuia (figura.8). 76
77 u d j j B" d v+ j j v d v v C' C O' O u C" B' B b A" a A' A u u+ u dx j j x dx jv jx dx x Figura.8 Componentee depasărior u, v pe axee Ox şi O variaă. Dacă punctu O are depasărie u şi v atunci punctee A şi C vor avea aceste depasări pus creşterie diferenţiae obţinute prin modificarea coordonateor puncteor (figura u.8). Depasarea totaă a punctuui A pe direcţia Ox este A x u + dx, iar x aungirea pe această direcţie este: u u dx u + dx u dx x x Aungirea specifică pe aceeaşi direcţie este dată de reaţia: ε xx d v d dx u dx x În mod anaog pe direcţia O se obţine: v v d v + d v d ε În mod anaog se determină aungirea specifică în direcţia O, încât pentru starea spaţiaă de deformaţii se poate scrie: 77
78 axei O: ε ε ε xx u x v w (.34) Înafara depasării în ungu axei Ox punctu A are şi o depasare în ungu v u v + dx, iar punctu B are o depasare în ungu axei Ox: u + d. x Dreptunghiu eementar OABC se transformă în paraeogramu O A B C. Latura O A se încină cu unghiu α (întrucât unghiu este foarte mic, se poate accepta că este ega cu vaoarea tangentei trigonometrice): tgα α v v + dx v x u dx + dx x v x v u x + x u unde a numitor s-a negijat ε xx faţă de unitate. x Latura O C se roteşte cu unghiu β şi în mod anaog reută: tgβ β u d v d + d u În aceste condiţii unecarea specifică în panu xo este dată de reaţia: γ x u v α + β + x Prin permutări se obţin unecărie specifice în ceeate două pane. Pentru starea generaă de deformaţii se poate scrie: 78
79 w v u x w x v u x x γ γ γ (.35) Aşa cum deja s-a preciat pentru materiaee iotrope unecărie specifice nu depind de sensu deformării şi în consecinţă se poate scrie: x x ; x x ; γ γ γ γ γ γ Pentru starea pană de deformaţie reaţiie (.34), (.35) se reduc a: x v u v x u x xx + γ ε ε (.36) Cee trei deformaţii nu sunt independente ee fiind funcţii de u şi v. Ee. Pentru a stabii reaţia dintre acestea se cacueaă: 3 x x x u x u x u ε ε (.37) 3 x v x x v v x ε ε x (.38) 3 3 x x v x u x v u x x + + γ (.39) Din reaţiie anterioare se observă că: 79
80 γ x x ε x ε + (.40) x Reaţia (.40) exprimă faptu că materiau este continuu şi poartă numee de ecuaţia de continuitate sau de compatibiitate a deformaţiior Ecuaţii constitutive (fiice) Este absout necesar să se stabiească o egătură între tensiuni şi deformaţii. Acesta egătură se determină experimenta, tensiunie şi deformaţiie fiind egate fiic prin egea de comportare a materiauui sub acţiunea sarcinior. Atfe spus: un anumit materia se deformeaă într-un anumit fe sub acţiunea unui anumit efort şi invers în interioru corpuui se devotă anumite tensiuni când acesta se deformeaă într-un anumit fe. eastice: Starea spaţiaă de tensiuni Easticitatea materiauui iotrop este definită de către trei caracteristici E moduu de easticitate ongitudinaă (Young), G - moduu de easticitate transversaă, ν - coeficientu de contracţie transversaă (coeficientu Poisson), dintre care numai două sunt independente. Între aceste caracteristici există reaţia cunoscuta din reistenta E materiaeor: G. ( +ν ) Pentru corpu iotrop afat în stare spaţiaă de tensiuni, reaţiie constitutive pot fi scrise sub forma: ε ε ε xx E E E [ ν ( + )] xx [ ν ( + )] [ ν ( + )] xx xx (.4) 80
81 respectiv: τ x τ τ x γx ; γx ; γ (.4) G G G Reaţiie repreintă egea ui Hooke pentru starea spaţiaă de tensiuni sau egea ui Hooke generaiată pentru materiae omogene şi iotrope. Din reaţiie (.4) pot fi determinate tensiunie funcţie de deformaţii: E xx [ ε xx + ν( ε + ε - ν E [ ε + ν( ε xx + ε )] (.43) - ν E [ ε + ν( ε xx + ε - ν )] )] Starea pană de tensiuni Pentru starea pană de tensiuni se obţine din egea ui Hooke generaiată urmatoaree reatii: ε ε xx E E ( -ν ) xx ( -ν ) xx (.44) τ x γ x (.45) G Din utimie reatii se exprimă tensiunie funcţie de deformaţii: E xx ( ε xx + νε - ν ) E ( ε + νε xx ) (.46) - ν τ x Gγ x Pentru direcţiie principae reaţiie devin: 8
82 respectiv ε ε E E ( -ν ) ( -ν ) (.47) E ( ε + νε ) - ν (.48) E ( ε + νε ) ν Starea uniaxiaă de tensiuni Pentru starea uniaxiaă de tensiuni (de exempu tracţiune pe direcţia axei Ox) reaţiie (.44) devin: ε ε xx xx E ν xx (.49) Din prima reaţie (.49), exprimând tensiunie funcţie de deformaţii, reută binecunoscuta ege a ui Hooke: xx Eε xx (.50).5. Teorii de rupere (de reistenţă) Aegerea coeficientuui de siguranţă se face în raport cu vaorie imită sau r pentru stabiirea tensiunii admisibie, adică: c L a (.5) c unde L repreintă tensiunea normaă care caracterieaă starea imită. Se consideră drept stare de tensiune imită a materiauui starea de tensiuni care corespunde fie începerii ruperii materiauui, fie începerii apariţiei 8
83 unui proces fiic care dintr-un motiv oarecare este considerat ca inadmisibi, nedorit sau pericuos. În starea monoaxiaă de tensiune aceste vaori se obţin direct în urma încercărior de aborator a întindere sau compresiune. Pentru un eement afat într-o stare de tensiune caracteriată prin tensiunie principae,, 3 determinate, cacuu coeficientuui de siguranţă necesită determinarea experimentaă a tensiunior imită L, L, L3 şi se determină cu reaţia: L L L3 c (.5) Aceste determinări experimentae se reaieaă rar în practică datorită număruui mare de încercări, a instaaţiior şi a maşinior compicate şi costisitoare. Necesitatea de a compara stărie de tensiune din diferite puncte ae corpuui, de a stabii punctu ce mai pericuos şi de a determina coeficientu de siguranţă, impune găsirea unui criteriu de apariţie a curgerii sau a unui criteriu de reistenţă, adică a unui factor cu ajutoru căruia s-ar putea aprecia pericou stării de tensiune şi s-ar putea stabii ocurie cee mai soicitate ae pieseor, fără a mai recurge a o încercare în fiecare ca în parte. Compararea stărior de tensiune se poate face uşor dacă se aege drept baă una din stărie de tensiune, cea mai caracteristică şi cea mai uşor de reaiat experimenta şi apoi foosind criteriu adoptat se compară cu această stare de tensiune toate ceeate. Această stare de tensiune uată drept baă se numeşte echivaentă. Drept stare echivaentă se ia starea monoaxiaă de tensiune, întrucât aceasta se poate reaia uşor fără a fi necesare maşini şi dispoitive compicate, epruvetee au o formă simpă şi sunt uşor de reaiat, iar starea de tensiuni din porţiunea de cacu a epruvetei este omogenă. Tensiunea echivaentă este tensiuna principaă a unui eement imaginar supus a întindere, executat din aceaşi materia ca şi eementu dat şi care se afă într-o stare de tensiuni tot atât de pericuoasă ca şi eementu dat. 3 83
84 S-au emis mai mute ipotee asupra ruperii materiaeor. Aegerea uneia dintre ipotee este determinată de modu în care se verifică experimenta aceasta pentru starea de tensiuni considerată. Prin urmare teoriie de rupere vor da expresiie tensiunii echivaente echiv care fac posibiă compararea stării compexe de soicitare cu cea de întindere simpă. În urma determinării tensiunii echivaente reaţia de verificare pentru piesă este: echiv a (.53).5.. Ipotea tensiunii normae maxime Această ipoteă admite că starea imită se atinge atunci când tensiunea normaă maximă din corp atinge vaoarea tensiunii stării imită de a soicitarea de întindere monoaxiaă. Se apică cu succes pentru predicţia ruperii unor corpuri executate din materiae fragie supuse a soicitări statice. Reutatee experimentae confirmă această ipoteă în cau ruperii materiaeor fragie când tensiunea normaă maximă este o tensiune de întindere. Ipotea nu poate fi foosită drept criteriu de reistenţă în cau unei stării compuse de tensiuni deoarece în genera conduce a supradimensionarea pieseor. Utiiarea teoriei tensiunii normae maxime se face cu reatia: echiv,5 + 0, τ (.54).5.. Ipotea deformaţiei specifice iniare maxime După această ipoteă apariţia stării pericuoase este determinată de vaoarea ungirii sau scurtării specifice maxime, atunci când aceasta este egaă cu deformaţia pericuoasă ε echiv. Pentru cacue se fooseste reatia: echiv,35 + 0, τ (.55) 84
85 .5.3. Ipotea tensiunii tangenţiae maxime Acest criteriu are a baă observaţiie experimentae conform cărora a materiaee ductie curgerea este reutatu unecărior în ungu unor pane ae cristaeor sub acţiunea tensiunior tangenţiae. În baa acestei teorii, starea imită se atinge atunci cand tensiunea tangenţiaă maximă atinge vaoarea tensiunii tangenţiae corespunătoare stării imită de a încercarea de întindere monoaxiaă. Pentru cau particuar a bareor reaţia de cacu este: echiv + 4τ (.56) Ipotea tensiunii tangenţiae maxime a fost verificată experimenta mai aes pentru materiaee tenace a soicitărie de întindere biaxiaă şi stărie de tensiune biaxiae mixte. Ea este confirmată în cau materiaeor care au aceeaşi reistenţă a întindere şi a compresiune Ipotea energiei de deformaţie Această ipoteă consideră că starea pericuoasă este atinsă atunci când energia de deformaţie specifică acumuată de piesă este egaă cu energia specifică corespunătoare stării imită de a întinderea simpă.). Această ipoteă a fost verificată experimenta în anumite cauri de materiaee tenace. Aceasta ipotea se apica printr-o reaţie de forma: echiv, 6 + τ (.57).5.5. Ipotea energiei de deformaţie modificatoare de formă Conform acestei ipotee starea pericuoasă este produsă nu de energia de deformaţie totaă, ci numai de energia de deformaţie modificatoare de formă. Prin urmare se adoptă drept criteriu de reistenţă cantitatea de energie potenţiaă specifică de variaţie a formei acumuată de materiau deformat în punctu considerat. Acest criteriu se apica prin urmatoarea reatie: echiv + 3τ (.58) 85
86 Această ipoteă se verifică experimenta pentru materiaee tenace. De asemenea aceasta se verifică şi pentru starea pastică a materiauui. Această utimă ipoteă corespunde mai bine cu reaitatea decât toate ceeate ipotee. De asemenea trebuie remarcat faptu că între această ipoteă de rupere şi cea a tensiunior tangenţiae maxime există diferenţe foarte mici, în momentu de faţă aceste două ipotee având o argă utiiare. De reţinut: Experienţee au arătat că nici una din teoriie de reistenţă nu s-a impus ca o teorie genera vaabiă. Totuşi în majoritatea stărior de tensiune teoria ui ohr, teoriie tensiunii tangenţiae maxime şi a energiei de deformaţie modificatoare de formă dau reutatee cee mai apropiate de cee obţinute experimenta. Pentru materiaee tenace (oţe) se recomandă utiiarea teoriei tensiunii tangenţiae maxime: echiv + 4τ a şi a teoriei energiei de deformaţie modificatoare de formă: echiv + 3τ a Pentru materiaee fragie se recomandă utiiarea ipoteei deformaţiei specifice iniare maxime: echiv 0,35 + 0,65 + 4τ a.5.6. Teoria stării imită a ui ohr Conform acestei teorii starea pericuoasă apare în momentu în care starea de tensiuni dintr-un punct a atins o stare imită care este caracteristică fiecărui materia. 86
87 Teoria stării imită a ui ohr nu necesită o verificare experimentaă supimentară deoarece se baeaă în întregime pe date experimentae. Aceasta se apică în specia a materiaee fragie când soicitarea dominanată este compresiunea. Starea spaţiaă de tensiuni principae (cu 3 < < ) se poate repreenta în pan cu ajutoru cercuui ui ohr. În baa ipoteei tensiunii tangenţiae maxime starea imită este definită de tensiunea tangenţiaă maximă: τ 3 max τ şi este independentă de vaoarea tensiunii principae. Prin urmare în definirea stării imită intereseaă numai cercu de diametru maxim 3 denumit cerc determinant. În cau materiaeor tenace drept stare imită se consideră atingerea imitei de curgere c. Pentru determinarea stării imită pentru un materia se încarcă o serie de epruvete din materiau respectiv cu diferite feuri de soicitări, în urma cărora se obţin L şi 3L (în cau considerat c şi 3c ). Vaorie astfe obţinute se repreintă în sistemu de axe rectanguare ui ohr cu centre pe axa O (figura.9). O τ prin cercurie În figură se repreintă starea de tensiuni a un materia care are reistenţa de rupere a întindere diferită de cea de a compresiune ( ), deci cercurie C şi respectiv C care repreintă întinderea şi compresiunea simpă şi care au diametre diferite. Înfăşurătoarea acestor cercuri repreintă starea imită pentru materiau respectiv şi pentru un materia dat este unică. Dacă se cunoaşte înfăşurătoarea pentru studiu reistenţei se procedeaă astfe: pentru starea de tensiuni dată se determină şi 3 şi se construieşte cercu ui ohr. Dacă acest cerc este în interioru înfăşurătoarei, starea de tensiuni studiată se găseşte în ona de reistenţă a materiauui. Dacă cercu ui ohr atinge curba înfăşurătoare materiau trebuie să cedee. cc ct 87
88 τ O C C Figura.9 Când materiau reistă a fe a întindere ca şi a compresiune (materiae tenace) cecurie C şi C au diametre egae şi înfăşurătoarea este repreentată în acest ca prin două drepte tangente a aceste cercuri pe porţiunea dintre ee (figura.0). τ O C Figura.0. C 88
89 Dacă pentru curba înfăşurătoare ce repreintă starea imită coeficientu de siguranţă este c atunci pentru curbee înfăşurătoare corespunătoare stărior sub starea imită coeficientu de siguranţă c>, iar în afară c<. Coeficientu de siguranţă este determinat în momentu în care se stabieşte care dintre înfăşurători este tangentă a cercu ce determină starea de tensiune studiată. Prin urmare, stabiirea coeficientuui de siguranţă pe baa acestei teorii este corectă, dar în aceasi timp este foarte aborioasă deoarece pentru fiecare materia trebuie construite astfe de înfăşurători imită pe baă de date experimentae reutate din încărcări. Din această cauă, se consideră în mod simpificat că se înocuieşte curba stării imită cu dreapta LN tangentă a cercurie ui ohr, care repreintă întinderea simpă şi compresiunea simpă (figura.). În acest ca înfăşurătoarea se construieşte numai pe baa a două încercări, una de întindere şi ata de compresiune. Cu notaţiie din figură se poate scrie: ci 3 ci 3 ci + 3 OK OO + OK + + Pentru o stare de soicitare oarecare definită prin tensiunie principae şi 3 se construieşte cercu cu centru în K având raa KL 3. Se poate stabii o reaţie între tensiunie principae, 3 şi imitee de curgere dată de condiţia tangentei comune a cee trei cercuri. ci, cc Considerând triunghiurie asemenea O PK şi O RO şi scriind proporţionaitatea dintre aturi se obţine: sau O K O O ci + 3 ci cc + KP O R 3 ci cc ci 89
90 După efectuarea cacueor se obţine: ci ci 3 (.59) cc s s s s s s î Figura. În reaţia (.59) ci repreintă starea imită pentru încercarea de întindere simpă, uată egaă cu imita de curgere. Prin urmare membru din stânga a reaţiei este tensiunea echivaentă stării imită. Reaţia (.59) devine: sau notând ci k se obţine: cc echiv echiv ci cc 3 3 k (.60) 90
91 În cau materiaeor tenace k şi reaţia (.60) devine: 3 echiv (.6) Utima reaţie este simiară cu reaţia care repreintă criteriu de reistenţă reutat din ipotea tensiunii tengenţiae maxime. Probeme propuse:. Asupra unui eement separat dintr-un corp acţioneaă tensiunie: xx 50Pa, 5Pa, τ x 35Pa. Se cere: - să se determine tensiunie normae principae şi direcţiie principae; - să se determine tensiunie tangenţiae extreme şi direcţiie principae; - să se repreinte stărie de eforturi principae; - să se trasee cercu ui ohr şi episa ui Lamé.. Se cunosc următoaree stări de tensiune date de tensorii tensiune: T T x x xx τ τ T x x 3 τ τ T x x 4 τ τ T xx T x x xx 6 τ τ Dacă xx 0Pa, 45Pa, τ x 50Pa se cere: - să se evidenţiee acţiunea tensiunior pe voume paraeipipedice eementare şi să se specifice soicitărie corespunătoare; - să se determine tensiunie normae principae şi direcţiie principae; - să se determine tensiunie tangenţiae extreme; - să se repreinte grafic stărie de tensiune prin cercu ui ohr. 9
92 3. Să se cacuee tensiunie echivaente pe baa teoriior de reistenţă în cau unei forfecari pure în care tensiunie tangenţiae au vaoarea de 55Pa. 4. Un cub cu atura de 00mm este soicitat pe trei direcţii. În urma soicitării deformaţia cubuui este: două aturi suferă o ungire de 50µm şi respectiv 80µm, iar a treia atură suferă o scurtare de 50µm. Să se cacuee tensiunie normae ce acţioneaă pe feţee cubuui (E 0 5 Pa, ν 0,35). 5. Grinda de oţe (E 0 5 Pa) din figura.3 acumueaă în urma soicitării o energie potenţiaă de deformaţie U 39500N mm. F Figura.. Dacă grinda are secţiune circuară cu diametru d 00mm,,m, să se verifice dacă materiau rămâne în domeniu eastic ( e 80Pa). 6. Se cunosc următoaree stări de deformaţie date de tensorii deformaţie: T ε ε 0 0 xx ε T ε 0 γ x 0 γ x Dacă ε xx 0,6 0-3, ε 0,4 0-3, γ x 0,7 0-3 se cere: - să se specifice soicitărie corespunătoare; - să se determine deformaţiie specifice principae şi direcţiie or; - să se repreinta grafic stărie de deformaţie prin cercu ui ohr. 9
93 CAPITOLUL 3 SOLICITĂRI COPUSE 3.. Generaităţi Soicitarea care produce în secţiunea transversaă două sau mai mute tensiuni se numeste soicitare compusă. Funcţie de natura tensiunior care iau naştere în secţiunea transversaă soicitărie compuse se pot casifica astfe:. Soicitări a care apar tensiuni pe aceeaşi direcţie (tensiuni de aceeaşi natură). Tensiunea reutantă se cacueaă ca suma agebrică a tensiunior componente (cu condiţia ca tensiunea reutantă şi cee componente să nu depăşească imita de proporţionaitate) şi se impune condiţia: τ re re i i i i τ τ În această categorie intră: soicitarea axiaă excentrică; soicitarea de încovoiere obică (încovoiere dubă); soicitarea axiaă (întindere sau compresiune) şi încovoiere; a a (3.) 93
94 G u r soicitarea de forfecare cu răsucire etc.. Soicitări a care apar tensiuni pe direcţii diferite (tensiuni de natură diferită). Tensiunea echivaentă se cacueaă, în acest ca, pe baa uneia dintre teoriie de reistenţă şi se impune condiţia: În această categorie intră: soicitarea de încovoiere cu răsucire; soicitarea de răsucire cu forţă axiaă etc. ech a (3.) 3.. Soicitări compuse a care apar tensiuni pe aceeaşi direcţie 3... Soicitarea axiaă excentrică În cau soicitării axiae s-a considerat că toate forţee ucreaă în centru de greutate a secţiunii transversae, adică pe axa geometrică a barei. În practică forţee pot ucra şi excentric fiind paraee cu axa barei. Dacă bara este soicitată de o forţă care nu este apicată pe direcţia centreeor de greutate şi deci nu coincide cu nici una din axee principae de inerţie reută o soicitare compusă de încovoiere cu forţă axiaă. x P x G r v u Figura
95 Se consideră o bară de secţiune oarecare supusă a întindere de o forţă P. Forţa ucreaă excentric, având raa de poiţie r şi coordonatee u şi v (figura 3..). Se duc în centru de greutate G a secţiunii două forţe P egae şi de sens contrar. Se obţine un cupu ega cu P r şi o forţă axiaă NP. Se repreintă vectoria momentu (perpendicuar pe panu pe care ucreaă forţa P). Se descompune acest moment după axee G şi G (figura 3..). da G α α inia forţeor Figura 3.. Pe un eement de arie oarecare da, de coordonate şi, apar tensiuni normae date de forţa axiaă N şi de momentee încovoietoare şi. Tensiunea reutantă este suma tensiunior corespunătoare ceor trei soicitări simpe: ( N ) + ( ) ( ) + (3.3.) unde: N P ( N ) A A ( ) I ( ) I (3.4.) Ţînând cont de reaţia 3.4., reaţia 3.3. devine: 95
96 I I A P + + (3.5) Dar: u P sin r P sin v P cos r P cos α α α α (3.6.) Ţînând cont de reaţia (3.6.), reaţia (3.5.) devine: i v i u A P A I v A I u A P I u P I v P A P (3.7.) unde: A I,i A I i - raee de giraţie sau de inerţie (în cau studiat rae principae centrae de inerţie ae secţiunii transversae). Prin urmare expresia tensiunii într-un punct de coordonate şi este: + + ± i v i u A P (3.8.) Observaţie: În reaţia (3.8.) semnu (+) se aege în cau unei soicitari de întindere excentrică, iar semnu ( ) pentru compresiunea excentrică. Dacă utima reaţie se egaeaă cu ero se obţine ecuaţia axei neutre (ocu geometric a puncteor pentru care tensiunie sunt nue). Deoarece 0 A P se obţine: 0 i v i u + + (3.9.) Observaţii: Se observă că poiţia axei neutre nu depinde de mărimea forţei ci numai de ocu de apicare a acesteia şi de forma geometrică a secţiunii transversae. 96
97 Se pot demonstra următoaree două proprităţi ae axei neutre:. Când axa neutră se roteşte în juru unui punct, punctu de apicaţie a forţei se depaseaă pe o dreaptă.. Când punctu de apicaţie a forţei se îndepărteaă de centru de greutate a secţiunii axa neutră se apropie de secţiune (punctu de apicaţie a forţei şi axa neutră au mişcări în aceaşi sens) Poiţia axei neutre se stabieşte prin tăieturi: 0 0 o o i v i u (3.0.) Deoarece pe axa neutră tensiunea este ero reută că aceasta împarte secţiunea în două: de o parte a axei avem soicitare de întindere, iar de ceaată parte soicitare de compresiune. Tensiunie maxime şi minime se găsesc în punctee cee mai îndepartate ae secţiunii faţă de axa neutră: cunoscând poiţia axei neutre se duc tangente a conturu secţiunii, paraee cu aceasta şi se obţin punctee din secţiune unde tensiunea are vaorie maxime şi minime. Înocuind în reaţia (3.9.) pe şi, pe rând, cu coordonatee acestor puncte se determină max şi min (figura 3.3.). axa neutr întindere 0 P 0 max compresiune min Figura
98 Pentru soicitarea axiaă excentrică se poate efectua doar un cacu de verificare. Se procedeaă astfe: se stabieşte poiţia axei neutre; se caută punctee cee mai îndepartate ae secţiunii faţă de această axă (punctee cee mai soicitate); se introduc coordonatee acestor puncte în reaţia (3.9.) şi se verifică dacă este îndepinită condiţia: max a (3..) 3... Sâmbure centra S-a preciat anterior că axa neutră împarte secţiunea transversaă în două one: una soicitată a întindere şi ceaată a compresiune. Pentru materiaee care se comportă diferit a întindere şi compresiune se poate pune probema ca pe secţiune să existe un singur fe de soicitare. În acest ca axa neutră poate fi ce mut tangentă a secţiune. Există o onă care conţine centru de greutate a secţiunii, având proprietatea că pentru orice poiţie a punctuui de apicaţie a forţei care aparţine sâmbureui centra axa neutră nu taie secţiunea (pe secţiune sunt numai tensiuni de aceaşi semn). Prin definiţie ocu geometric a tuturor puncteor de apicaţie ae fortei astfe încât pe secţiune să existe un singur fe de soicitare (axa neutră să fie tangentă a secţiune) poarta numee de sâmbure centra. Pentru determinarea conturuui sâmbureui centra se caută să se găsească acee puncte de apicaţie ae forţei, pentru care axa neutră este tangentă a conturu secţiunii. Pentru a stabii sâmburee centra se procedeaă a identificarea ecuaţiei axei neutre cu ecuaţia tangentei a contur. Apicaţii: Să se determine sâmburee centra pentru secţiunie din figurie 3.4. şi Secţiunea dreptunghiuară 98
99 (figura 3.4.). Se consideră axa neutră tangentă a secţiune pe atura AB în poiţia d (d 3 ) A B (d 4 ) (d ) N h/6 h D Q b R b/6 C (d ) Figura 3.4. Din ecuaţia dreptei d efectuând cacuee se obţine: Din identificarea reaţiior (3.9.) şi (3..) reută: sau înocuind raa de giraţie se obţine: h 0 (3.) h h i I A u 0 i v h 3 b h b h u 0 h h v h h 6 (3.3) 99
100 Vaorie indicate de reaţia (3.3.) repreintă coordonatee punctuui (0, -h/6) indicat în figura 3.4. Dacă se consideră axa neutră în poiţia simetrică d se obţine în mod simiar punctu N(0, h/6). Se consideră apoi axa neutră tangentă a secţiune pe atura AD în poiţia d 3 (figura 3.4.). Din ecuaţia dreptei d 3 efectuând cacuee se obţine: b + 0 (3.4) b b Din identificarea reaţiior (3.9.) şi (3.4.) reută: sau înocuind raa de giraţie se obţine: i I A i u b v 0 3 b h b h b b u b v 0 b 6 (3.5) Vaorie indicate de reaţia (3.5.) repreintă coordonatee punctuui de apicaţie a forţei, punctu R(b/6, 0) indicat în figura 3.4. Dacă se consideră axa neutră în poiţia simetrica d 4 se obţine în mod simiar punctu Q(-b/6, 0). Se figureaă punctee, N, R, Q care se unesc prin segmente de dreaptă şi se obţine sâmburee centra (un romb cu diagonaee h/3 şi b/3).. Secţiunea circuară Întrucât secţiunea circuară admite o infinitate de tangente, sâmburee centra se va obţine nu prin particuariarea poiţiei tangentei a contur ci prin determinarea ecuaţiei conturuui sâmbureui centra. Se consideră un punct C( o, o ) de pe conturu secţiunii şi se consideră tangenta a cerc în acest punct (figura 3.5.). 00
101 Figura 3.5. Pornind de a ecuaţia cercuui: R + ecuaţia dreptei d (ecuaţia tangentei) este: o o R + Prin efectuarea cacuee se obţine: 0 R R R R o o o o + (3.6) Din identificarea reaţiior (3.9.) şi (3.6.) reută: 0 R R 0 i v i u o o + + de unde: o o i v R i u R sau R R/4 C( 0, 0 ) (d) 0
102 Pentru secţiunea circuară: o o u R i v R i (3.7) π R i i 4 π R Înocuind cee două rae de inerţie în reaţia (3.7) se obţine: o o 4 4u 4v Se particuarieaă ecuaţia cercuui pentru punctu C şi se obţine ecuaţia sâmbureui centra: o R + o R 6u + 6v R u + v (3.8) 4 Prin urmare sâmburee centra este un cerc a cărui raă este un sfert din raa cercuui (figura 3.5.). R Soicitarea de încovoiere obică (dubă) La soicitarea de încovoiere simpă s-a considerat că toate încărcărie acţioneaă într-un pan de simetrie ongitudina a grinii sau în ipsa acestuia într-un pan ce conţine una din axee centrae principae de inerţie. Încovoierea obică se produce atunci când toate încărcărie ucreaă într-un pan ongitudina oarecare care face un unghi α cu una din axee centrae principae. Se consideră o grindă soicitată a încovoiere de o forţă P ce face un unghi α cu axa centraă principaă de inerţie O (figura 3.6.). omentu încovoietor într-o sectiune x, respectiv momentu maxim pentru grinda considerată sunt: 0
103 P Figura 3.6. ( x) max P x P Se repreintă momentu şi se descompune după axee O şi O (figura 3.7.). axa neutră A α P B da D 0 C α β B D Figura 3.7. Va reuta în acest fe o încovoiere dubă în juru axei O (dată de momentu ) şi ata în juru axei O (dată de momentu ). Pe un eement infiniteima de suprafaţă oarecare da de coordonate şi apar tensiunie normae date de cee două momente. Cee două tensiuni fiind tensiuni de aceeaşi 03
104 natură şi deci vectori coiniari, reută că tensiunea totaă va fi suma tensiunior de a cee două încovoieri: + ( ) ( ) Cee două tensiuni componente se cacueaă cu reaţia ui Navier. Prin urmare: + (3.9) I I Ţînând cont de expresiie ceor două momente încovoietoare: cosα sinα expresia momentuui din reaţia (3.9.) devine: cosα + sinα (3.0) I I Ecuaţia axei neutre se obţine impunând condiţia 0 şi se obţine: I cosα + sinα 0 I I I tgα (3.) Reaţia (3..) repreinta ecuaţia unei drepte a cărei pantă este: I tgβ tgα (3.) I Semnu minus din reaţia precedentă îndică faptu că unghiu se măsoară sub axa O. Cum de reguă: I > I β > α reută că axa neutră nu mai corespunde cu direcţia vectoruui moment aşa cum se întâmpă a soicitarea de încovoiere simpă. Cunoscând poiţia axei neutre se poate repreenta variaţia tensiunior şi se pot determina vaorie maxime ae acestora ducând tangente a secţiune paraee cu axa neutră. Ca şi în cau încovoierii simpe tensiunie maxime şi minime apar în punctee cee mai îndepărtate de axa neutră (în cau preentat în punctee B şi D). Vaoarea maximă a tensiunii se determină cu reaţia: 04
105 B max max W I cosα + max W cosα + I sinα max sinα (3.3) Pentru verificare se impune condiţia max a sau ţinând cont de reaţia (3.3.) reută: Se noteaă: max W cosα + sinα a (3.4) W W W k (3.5) W şi reaţia (3.4) devine: max În cau secţiunii dreptunghiuare se ştie că: W ( cosα + k sinα ) a (3.6) W bh 6 hb 6 bh 6 hb 6 ;W k Înocuind coeficientu k reaţia (3.6) devine: max 6 b h h b ( b cosα + h sinα ) a Pentru dimensionare se consideră a imită în reaţia (3.6.) semnu de egaitate şi se obţine: W ( cosα + k sinα a ) (3.7) În reaţie apar două necunoscute W şi W şi din acest motiv dimensionarea nu se poate face decât prin încercări. Se procedeaă astfe: - se dă o vaoare arbitrară coeficientuui k şi se determină W cu reaţia: 05
106 W a ( cosα + k sinα ) - cunoscând k şi W se determină W din reaţia (3.5). - se verifică inegaitatea din reaţia (3.6). Dacă inegaitatea nu este satisfăcută cacuu se repetă. Observaţie: Pentru profiee aminate vaorie coeficientuui k se determină ca raport W W a primu şi utimu profi din tabee Soicitarea compusă de încovoiere şi forţă axiaă Această soicitare apare a grinie drepte soicitate de sarcini obice şi a sistemee pane (grini cotite, cadre, bare curbe pane static determinate şi static nedeterminate). În acest ca se trateaă pe rând fiecare soicitare. Soicitarea de încovoiere conduce a o tensiune normaă dată de reaţia ui Navier ( W i max ), iar din soicitarea axiaă va reuta o tensiune normaă cacuată N cu reaţia cunoscută. A Cee două tensiuni sunt de aceeaşi natură şi prin urmare tensiunea reutantă va fi suma tensiunior de a cee două soicitări simpe: i max N re ± (3.8) W A Pentru cacu se va reova separat soicitarea de încovoiere şi de forţă axiaă şi se traseaă diagramee de moment încovoietor şi de forţă axiaă. Cee două diagrame vor avea anumite semne corespunătoare convenţiior de semne adoptate. Pentru efectuarea cacuuui de reistenţă se fooseşte reaţia (3.8) înocuîndu-se vaorie numerice pentru şi N cu semnee din diagramă şi 06
107 aegându-se între termeni semnu pus sau minus astfe încât vaoarea absoută a reutatuui să fie maximă. Acest mod de cacu este permis numai în cau oţeurior pentru că au aceeaşi reistenţă a întindere şi a compresiune. Pentru materiaee care reistă diferit a întindere şi a compresiune trebuie studiată starea de tensiune pentru a determina tensiunea maximă din ona întinsă şi din ona comprimată. Fiecare dintre acestea se compară separat cu tensiunea admisibiă a întindere sau compresiune. Cacuu de verificare şi dimensionare Pentru verificare se impune condiţia: max a Având trasate cee două diagrame de moment încovoietor şi de forţă tăietoare pot reuta următoaree două cauri:. omentu încovoietor şi forţă axiaă ating vaoarea maximă în aceeaşi secţiune care va fi sigur secţiunea pericuoasă şi în care se verifică dacă este respectată inegaitatea anterioară.. omentu încovoietor maxim şi forţă axiaă maximă nu corespund aceeaşi secţiuni. În acest ca se face o verificare dubă atât în dreptu momentuui încovoietor maxim cât şi în dreptu forţei axiae maxime. Pentru dimensionare se consideră a imită în reaţia de verificare semnu de egaitate şi se obţine: W i max + Reaţia anterioară conţine două necunoscute: W şi A. Cum ecuaţia nu poate fi reovată se ţine cont că în mod obişnuit termenu A N este mut mai mic decât N A a W i max obţine: şi se face o predimensionare numai din condiţia de încovoiere. Se 07
108 W nec i max a Pentru a ţine cont că s-a negijat termenu A N se micşoreaă reistenţa admisibiă a cu un procent de 0% adică în cacu se fooseşte ' a 0, 9 a. Prin urmare: W nec i max ' a După aceasta se determină şi aria A. După această predimensionare având moduu de reistenţă şi aria secţiunii transversae se va proceda a un utim cacu de verificare uând în consideraţie reistenţa reaă a materiauui, adică: i max N ef + a W A Dacă inegaitatea este satisfacută dimensionarea este corectă. În ca contrar se va trece a mărirea secţiunii, prin încercări, până când. Observaţie: Pentru soicitarea de încovoiere cu compresiune cacuu se face în aceaşi mod. În acest ca pentru grinie de ungime mare este necesar şi un cacu de verificare a fambaj. ef a Grini cotite (cadre) Un ansambu de bare unite între ee prin noduri rigide se numeste cadru. Cadree se casifică stfe: - cadre static determinate (în mod uua aceste cadre se numesc grini cotite); - cadre static nedeterminate, care se pot casifica a rându or astfe. cadre static nedeterminate exterior (necunoscute sunt reacţiunie din reaeme);. cadre static nedeterminate interior (necunoscute sunt eforturie din bare); 08
109 3. cadre static nedeterminate exterior şi interior (necunoscute sunt atât reacţiunie din reaeme cât şi eforturie din bare). Cadree sunt supuse a soicitarea compusă de încovoiere cu forţă axiaă. Aceasta înseamnă că trebuie trasate diagramee de moment încovoietor şi forţă axiaă, iar pentru verificarea diagramei de moment şi diagrama de forţă tăietoare. Pentru trasarea acestor diagrame rămân vaabie toate reguie stabiite a grinie drepte exceptând doar regua de semne pentru moment încovoietor şi modu de repreentare a diagrameor. Pentru a stabii semnu momentuui încovoietor într-o secţiune se imagineaă o fibră din interioru barei care se repreintă punctat. Dacă această fibră este întinsă momentu se consideră poitiv, iar dacă fibra este comprimată momentu se consideră negativ. Cee trei diagrame (de moment încovoietor, forţă tăietoare şi forţă axiaă) vor fi repreentate de fiecare dată pe conturu cadruui. figura Cadre static determinate (grini cotite) Să se trasee diagramee de eforturi (, N, T) pentru grinda cotită din 3a x q a a x a Figura 3.8. Reovare: Se poate porni de a capătu iber şi nu mai este necesar cacuu ceor trei reacţiuni din încastrare. 09
110 Diagrama de moment încovoietor Se consideră fibra punctată a interioru cadruui. Se scriu expresiie momentuui încovoietor pe cee patru regiuni şi se studiaă variaţia momentuui. [ 0,a] ( ) q q Se studiaă variaţia momentuui: ( 0) 0; ( a) ' '' qa ' ( ) q ( ) 0 0 [ 0,a] ( ) q < 0 ( 0) 0 x [ 0,a] a max qa ( x ) q a const. [ 0,a] ( ) q a a omentu are o variaţie iniară, vaorie pe capetee intervauui fiind: qa ( 0) ; ( a) x [ 0,3a ] 3a 3qa 3qa ( x ) q a const. Pentru a trasa diagrama de moment încovoietor se consideră conturu cadruui fără încărcare şi reemare. Locu unde se repreintă vaorie poitive şi negative ae momentuui nu se impune: repreentarea se face în aşa fe încât diagrama să reute cât mai cară (în diagramă să avem cât mai puţine suprapuneri). Pentru grinda cotită preentată s-a aes ca vaorie poitive ae momentuui să fie repreentate a interior (figura 3.9.). 0
111 3qa²/ 3qa²/ qa²/ qa²/ qa²/ Figura 3.9. Observaţii: În noduri, a trecerea de a o regiune, a ata momentu trebuie să se racordee în diagramă. Există o singură situaţie în care nu se produce racordarea şi anume atunci când în nod există un moment concentrat. În acest ca trecerea de a o regiune a ata se va face printr-un sat a momentuui ega în vaoare absoută cu mărimea momentuui concentrat. Rămân vaabie toate reguie de verificare pentru diagrama de moment încovoietor stabiite în cau grinior drepte. Diagrama de forţă tăietoare Expresiie forţeor tăietoare se scriu ţînând cont de definiţia şi regua de semne stabiite a grinie drepte. Expresiie forţei tăietoare pe cee patru regiuni sunt: [ 0,a] T ( ) q Se studiaă variaţia forţei: T ( 0) 0;T ( a) qa x [ 0,a] T ( x ) 0
112 [ 0,a] ( ) qa T x [ 0,3a ] T ( x ) 0 Pentru a trasa diagrama de forţe tăietoare (figura 3.0) nu este obigatoriu să se păstree ocu unde s-au repreentat vaorie poitive şi negative pentru moment. qa T qa Figura 3.0. Diagrama de forţă axiaă Expresiie forţei axiae pe cee patru regiuni sunt (aceste expresii se scriu ţînând cont de definiţia şi regua de semne stabiite a baree drepte): [ 0,a] N( ) 0 x [ 0,a] ( x ) qa N [ 0,a] N( ) 0 x [ 0,3a ] N( x ) qa Diagrama forţei axiae este preentată în figura 3..
113 qa N qa Figura 3.. Pentru grinda cotită studiată secţiunea pericuoasă, în care se efectueaă cacuu de reistenţă, se afă pe bara oriontaă unde avem simutan 3 max qa şi N max qa Cadre static nedeterminate exterior Cadree static nedeterminate exterior sunt cadre deschise. Din modu or de reemare reută mai mute necunoscute (reacţiuni) decât cee trei ecuaţii de echiibru independente care se pot scrie. Există mai mute metode pentru ridicarea nedeterminării. Vor fi preentate în continuare două metode: metoda baată pe teoremee ui Castigiano şi metoda eforturior, ambee preentate în Capitou, paragrafu.. Apicaţii:. Să se trasee diagramee de eforturi pentru cadru din figura 3.. Toate baree cadruui au aceeaşi rigiditate (E I const.) Reovare: Se va ridica nedeterminarea foosind prima teoremă a ui Castigiano. Pentru a ridica nedeterminarea cadruui se parcurg aceeaşi etape ca şi a grinie drepte. 3
114 x F / / H A H B V A V B Figura 3.. Se scriu ecuţiie de echiibru independente: H V A A H F + V A B 0 H B 0 0 V B A H F B H 0 V B F V Cadru din figura 3. este simetric şi prin urmare: - reacţiunie sunt simetrice (aşa cum s-a văut şi din cacu V A F F VA ) şi B prin urmare condiţia de simetrie poate înocui una din ecuaţiie de echiibru; - se poate studia cadru pe jumătate, iar pe ceaată jumătate diagramee se traseaă ţînând cont de faptu că diagramee de moment încovoietor şi forţă axiaă sunt simetrice, iar diagrama de forţă tăietoare este antisimetrica (pe axa de simetrie forţă tăietoare este nuă) Necunoscuta static nederminată în raport cu care se apică prima teoremă ui Castigiano este H. Prin urmare: / ( ) ( ) ( x) ( x) d + dx L 0 H (3.9) E I H E I H Pentru [ 0, ] 0 0 4
115 ( ) H H Pentru x [ 0, / ] ( ) ( x) F ( x) H + VA x H + x H Se înocuiesc expresiie momenteor încovoietoare şi ae derivateor parţiae în reaţia (3.9) şi se obţine: 0 ( H ) ( ) d + H + x ( ) 0 E I E I 0 8 H H 3 F 8 3 / 0 H 3F F dx Se înocuieşte reacţiunea în expresiie ceor două momente şi se studiaă variaţia acestora. Reută: 3F ( ) H omentu are o variaţie iniară, vaorie pe capetee intervauui fiind: ( 0) ( ) ( x) 0 3F 56 Pentru cea de a două regiune: H + V 3F ( 0) 56 F ( / ) 56 A 3F F x + x 56 Se repreintă diagrama de moment încovoietor pe jumătatea stângă a cadruui, iar pe ceaată jumătate se traseaă prin simetrie. Se obţine diagrama din figura
116 3F/56 F/56 Figura 3.3. Expresiie forţeor tăietoare sunt: [ 0, ] T ( ) x ( x) H [ 0, / ] T VA F 3F Ambee sunt vaori constante şi se repreintă pe conturu cadruui. Pe jumătatea din partea dreaptă diagrama se repreintă prin antisimetrie. Se obţine diagrama din figura 3.4. F/ F/ T 3F/ Figura
117 ( ) Expresiie forţeor axiae sunt: [ 0, ] N V A x N F [ 0, / ] ( x) H 3F Se repreintă vaorie pe jumătatea stângă a cadruui, iar pe ceaată jumătate se traseaă diagrama forţei axiae prin simetrie. Se obţine diagrama din figura F/ N F/ F/ Figura 3.5. Observaţie: Unui cadru care preintă simetrie ca formă geometrică şi reemare şi care este încărcat antisimetric îi corespunde o diagramă de forţă tăietoare simetrică şi diagrame ae momentuui şi forţei axiae antisimetrice (cee două eforturi sunt nue pe axa de antisimetrie).. Să se trasee diagramee de eforturi pentru cadru din figura 3.6. Toate baree cadruui au aceeaşi rigiditate (E I const.). 7
118 q x H A V A V B H B Figura 3.6. Reovare: Se scriu ecuaţiie de echiibru independente: H V A A + H + V A B B q 0 0 V 0 V B A V B q 0 V B q V A (3.9) q Cadru este simpu static nedeterminat şi nedeterminarea se va ridica foosind metoda eforturior. Se vor parcurge etapee preentate în Capitou, paragrafu.. Se aege sistemu de baă preentat în figura 3.7. q X Figura
119 Pentru a obţine sistemu de baă se eimină un număr de egături pe care e are sistemu, ega cu număru necunoscuteor static nedeterminate, până când devine static determinat (se înocuieşte reaemu articuat A cu un reaem simpu în care acţioneaă necunoscuta static nedeterminată, efortu X ). ai întâi se studiaă sistemu de baă încărcat numai cu sarcina exterioară (figura 3.8), necunoscuta static nedeterminată fiind nuă (X 0). q x H B V A V B Figura 3.8. Se studiaă apoi sistemu de baă fără sarcina exterioară, dar încărcat numai cu necunoscuta static nedeterminată, care devine egaă cu unitatea (figura 3.9.). x X H B V A V B Figura 3.9. Necunoscuta static nedeterminată se determină din ecuaţia: 9
120 δ + δ 0 (3.30) X 0 Reovarea ecuaţiei necesită determinarea preaabiă a coeficienuui de infuenţă δ şi a termenuui iber δ 0. Dacă se negijeaă infuenţa forţei tăietoare şi a forţei axiae coeficientu de infuenţă şi termenu iber din ecuaţia precedentă pot fi determinaţi cu următoaree reaţii: δ δ m m i i ii dxi i EI i 0mi i0 dxi i EI i (3.3) unde: 0 - momentu încovoietor când sistemu de baă soicitat de către sarcinie exterioare; m i - momentu încovoietor când sistemu de baă este încărcat numai cu X i. Observaţie: Pentru cacuu integraeor care apar în reaţia precedentă se poate foosi şi metoda ohr-vereşceaghin, preentată în Capitou, paragrafu.. Se studiaă sistemu de baă încărcat numai cu sarcina exterioară (figura 3.8). Se scriu ecuaţiie de echiibru şi se determină reacţiunie: H V ' B ' A q V A ' B 0 V ' B q 0 V ' B V ' A q Se scriu expresiie momenteor încovoietoare pe cee trei regiuni şi se studiaă variaţia acestora. [ 0,] o ( ) q q 0
121 Se studiaă variaţia momentuui: ( 0) 0; ( ) ' '' q ' ( ) q ( ) 0 0 [ 0,] ( ) q < 0 ( 0) 0 x [ 0,] o o ( x ) V ' A q x max q ( 0) ; () q [ 0,] o o ' ( ) H B ( 0) 0; ( ) q o o Diagrama de variaţie a momentuui este preentata în figura 3.0. q²/ q² Figura 3.0. Se studiaă sistemu de baă încărcat numai cu necunoscuta static nedeterminată, care este egaă cu unitatea (figura 3.9.). Se scriu ecuaţiie de echiibru şi se determină reacţiunie:
122 H V '' B '' A V A '' B 0 V '' B 0 V '' B V '' A 0 Se scriu expresiie momenteor încovoietoare pe cee trei regiuni şi se studiaă variaţia acestora. [ 0,] ( ) X m Se studiaă variaţia momentuui: ( 0) 0;m ( ) m x [ 0,] ( x ) X m [ 0,] m m '' ( ) H B ( 0) 0;m ( ) Diagrama de variaţie a momentuui este preentată în figura 3.. m Figura 3.. Se cacueaă coeficienţii din reaţia (3.3) foosind metoda ohr- Vereşceaghin. Se obţine:
123 δ 0 4 q E I E I q q 9q 4 3 4EI 4 q q 3 δ E I 3 Din reaţia (3.30) se obţine: EI X 9q 4EI 5 3EI δ δ 4 q Prin urmare H A 9 q. Din reaţia (3.9), din ecuaţia de proiecţii de forţe pe 40 oriontaă, se obţine H B q. Având reacţiunie cacuate (nedeterminarea 40 cadruui a fost ridicată) se revine a sistemu din figura 3.6. Se fac secţiuni pe cee trei regiuni şi se scriu expresiie momenteor încovoietoare, forţeor tăietoare şi forţeor axiae şi se studiaă variaţia acestora. Expresiie momenteor încovoietoare sunt: [ 0,] ( ) H A q Se studiaă variaţia momentuui: 9 q 40 q ( 0) 0; ( ) ' '' ' ( ) q q ( ) 0 0 7, [ 0,] ( ) q < 0 ( 0 7, ) 0,6q x [ 0,] q q max 9 40 q 0,5q
124 ( x ) V 9 40 A x q q + H A q x ( 0) q 0,5q ; () q 0,75q [ 0,] ( ) H B ( 0) 0; ( ) 0,75q q 40 q 40 + H Diagrama de variaţie a momentuui încovoietoar este preentată în figura 3.. Expresiie forţei tăietoare pe cee trei regiuni sunt: [ 0,] T 9 40 ( ) H A q q q Se studiaă variaţia forţei: T ( 0) q;t () q A 0,6q 0,5q 0,75q ² Figura 3.. x [ 0,] T ( x ) V A q 4
125 [ 0,] T 40 ( ) H q B Se repreintă variaţia forţei tăietoare şi se obţine diagrama din figura 3.3. q/ q/40 T 9q/40 q/40 Figura 3.3. Pentru forţă axiaă se obţine: [ 0,] N ( ) V A x [ 0,] N q ( x ) q + H q + q q A [ 0,] N ( ) V B q Diagrama forţei axiae este preentată în figura
126 q/40 N q/ q/ Figura Să se trasee diagramee de eforturi pentru cadru din figura 3.5. Toate baree cadruui au aceeaşi rigiditate (E I const.) P P Figura 3.5. Reovare: Cadru este tripu static nedeterminat şi nedeterminarea se va ridica foosind metoda eforturior. Ţînând cont de faptu că acest cadru este încărcat antisimetric e poate fi studiat prin secţionare pe axa de antisimetrie ceea ce reduce gradu de nedeterminare. Pe axa de antisimetrie momentu încovoietor şi forţă axiaă sunt nue, sistemu obţinut fiind simpu static nedeterminat. Se aege sistemu de baă din figura 3.6, în secţiune acţionând necunoscuta static nedeterminată, efortu X. 6
127 X x X P P Figura 3.6. Se ia în consideraţie jumătatea din partea stângă şi se studiaă, mai întâi, sistemu de baă încărcat numai cu sarcina exterioară (figura 3.7), necunoscuta static nedeterminată fiind nuă (X 0). x P Figura 3.7. acestora. Se scriu expresiie momenteor încovoietoare şi se studiaă variaţia x [ 0,] ( x ) 0 o [ 0,] 7
128 ( ) 0 o [ 0, ] o o ( ) P ( 0) 0; ( ) P o Diagrama de variaţie a momentuui încovoietoar este preentată în figura 3.8. P Figura 3.8. Se studiaă apoi sistemu de baă fără sarcina exterioară, încărcat numai cu necunoscuta static nedeterminată, care devine egaă cu unitatea (figura 3.9.). X x Figura
129 Se scriu expresiie momenteor încovoietoare pe cee trei regiuni. x [ 0,] ( x ) X x m x Se studiaă variaţia momentuui: ( 0) 0;m ( ) m [ 0,] ( ) X m [ 0, ] ( ) X m Diagrama de variaţie a momentuui încovoietor este preentată în figura m Figura Se cacueaă coeficienţii din reaţia (3.3) foosind metoda ohr- Vereşceaghin. Se obţine: δ δ 0 E I E I P P EI EI Necunoscuta static nedeterminată se determină din ecuaţia: δ δ 3 X
130 Se obţine: X P EI 0 3 δ δ 0 3EI P Având ridicată nedeterminarea se revine a sistemu din figura 3.6, se fac secţiuni pe cee trei regiuni, se scriu expresiie momenteor încovoietoare, forţeor tăietoare şi forţeor axiae şi se studiaă variaţia acestora. Se traseaă diagramee de variaţie pentru jumătatea stângă a cadruui, iar pentru ceaată jumătate prin simetrie pentru forţa tăietoare şi prin antisimetrie pentru momentu încovoietor şi pentru forţa axiaă. x [ 0,] 3 5 ( x ) X x P x Se studiaă variaţia momentuui: ( 0) 0; ( ) P [ 0,] 3 5 ( ) X P [ 0, ] 3 5 ( ) X P P P Variaţia momentuui este: ( 0) P; ( ) P Diagrama de variaţie a momentuui este preentată în figura P/ P/5 30 Figura 3.3
131 Expresiie forţei tăietoare pe cee trei regiuni sunt: x [ 0,] 3 5 ( x ) X P T [ 0,] T ( ) 0 [ 0, ] T ( ) P Se repreintă variaţia forţei tăietoare şi se obţine diagrama din figura P/5 T P Pentru forţa axiaă se obţine: N( x ) 0 Figura ( ) X P N 3 5 ( ) X P N Diagrama forţei axiae este preentată în figura
132 N 3P/5 3P/5 Figura Cadre static nedeterminate interior Cadree static nedeterminate interior sunt cadre închise. În cau genera aceste cadre sunt tripu static nedeterminate (necunoscutee static nedeterminate sunt în acest ca eforturie din bare: momentu încovoietor, forţa tăietoare şi forţa axiaă). Ridicarea determinării se poate face prin aceeaşi metode ca şi pentru cadree static nedeterminate exterior. Apicaţie:. Să se trasee diagramee de eforturi pentru cadru din figura Toate baree cadruui au aceeaşi rigiditate (E I const.) F F Figura Reovare: Se secţioneaă cadru pe axa de simetrie şi prin urmare T0 (figura 3.35). 3
133 N F x N N F N Figura Se pun în evidenţă cee două eforturi nenue care apar în secţiune (momentu încovoietor şi forţa axiaă). Se scrie echiibru uneia dintre jumătăţi şi se obţine: F N N Rămâne ca necunoscută static nedeterminată momentu încovoietor. Se va ridica nedeterminarea foosind a doua teoremă ui Castigiano fiind parcurse aceeaşi etape ca şi a grinie drepte. Din motive de simetrie este suficient să se facă cacuu doar pe un sfert de cadru. Prin urmare: F / ( x) ( x) ( ) ( ) dx + 4 d L 0 4 (3.3) E I E I 0 0 Se fac două secţiuni a distanţee x şi, se scriu expresiie momenteor încovoietoare şi se cacueaă derivatee parţiae. x [ 0,] ( x) ( x) [ 0, / ] ( ) F ( ) Se înocuiesc expresiie momenteor încovoietoare şi ae derivateor parţiae în reaţia (3.3) şi se obţine: 33
134 / 0 dx + E I E I + F d F 8 Se înocuieşte momentu cu vaoarea determinată în expresiie ceor două F 4 momente încovoietoare şi se studiaă variaţia acestora. Reută: F 4 ( x) const. Pentru cea de a doua regiune: F F 4 F ( ) omentu are o variaţie iniară, vaorie pe capetee intervauui fiind: ( 0) ( / ) F 4 5F 4 Se repreintă variaţia momentuui încovoietor pe un sfert de cadru, iar pe restu conturuui diagrama se traseaă prin simetrie. Se obţine diagrama din figura F/4 5F/4 Figura Expresiie forţeor tăietoare sunt: T ( x) 0 34
135 ( ) T F Ambee sunt vaori constante şi se repreintă pe conturu cadruui. Pe jumătatea din partea dreaptă diagrama se repreintă prin antisimetrie. Se obţine diagrama din figura F/ F/ T F/ F/ Figura Expresiie forţeor axiae sunt: ( x) N N N ( ) 0 F Se repreintă vaorie pe jumătatea stângă a cadruui, iar pe ceaată jumătate se traseaă diagrama forţei axiae prin simetrie. Se obţine diagrama din figura N F/ F/ Figura
136 Cadre static nedeterminate exterior şi interior În această categorie de cadre necunoscutee sunt atât reacţiunie din reaeme cât şi eforturie din bare. În cau genera aceste cadre sunt tripu static nedeterminate interior a care se adaugă nedeterminarea care reută din modu de reemare. Ridicarea determinării se poate face prin aceeaşi metode. Pentru a reduce gradu de nedeterminare se fooseşte simetria, respectiv antisimetria sistemuui. Apicaţie:. Să se trasee diagramee de eforturi pentru cadru din figura Toate baree cadruui au aceeaşi rigiditate (E I const.) Figura Reovare: Cadru este tripu static nedeterminat interior şi tripu static nedeterminat exterior. Nedeterminarea se va ridica foosind metoda eforturior. Ţînând cont de faptu că acest cadru este încărcat antisimetric e poate fi studiat prin secţionare pe axa de antisimetrie (pe axa de antisimetrie momentu încovoietor şi forţa axiaă sunt nue), sistemu rămânând în fina dubu static nedeterminat. Se aege sistemu de baă din figura 3.40, în secţiune acţionând necunoscutee static nedeterminate, eforturie X şi X. 36
137 X x X X x X Figura Se ia în consideraţie jumătatea stângă şi se studiaă sistemu de baă încărcat numai cu sarcina exterioară (figura 3.4). x x Figura 3.4. Se scriu expresiie momenteor încovoietoare: ( x ) ( x ) 0 o o ( ) ( ) o o Diagrama de variaţie a momentuui este preentată în figura
138 Se studiaă apoi sistemu de baă încărcat numai cu necunoscuta static nedeterminată X (figura 3.43.). Se scriu expresiie momenteor încovoietoare pe cee patru regiuni. o Figura 3.4. x X x Figura ( x ) X x m x Se studiaă variaţia momentuui: ( 0) 0;m ( ) m Pe ceeate trei regiuni momentee sunt: m m ( ) m( ) ( x ) 0 X 38
139 Diagrama de variaţie a momentuui este preentată în figura m Figura Se studiaă apoi sistemu de baă încărcat numai cu necunoscuta static nedeterminată X (figura 3.45.). x X x Figura Se scriu expresiie momenteor încovoietoare pe cee patru regiuni. ( x ) m ( ) 0 m Pe ceeate două regiuni momentee sunt: m m ( x ) X x x m ( 0) 0;m ( ) ( ) X Diagrama de variaţie a momentuui este preentată în figura
140 m Figura Necunoscutee static nedeterminate se determină din sistemu de ecuaţii canonice (vei Capitou, paragrafu.): δ δ X X + δ + δ X X + δ + δ (3.33) 0 Se cacueaă coeficienţii din reaţia (3.33) foosind metoda ohr- Vereşceaghin. Se obţine: δ E I EI δ δ E I 3 EI δ E I EI δ 0 E I ( ) EI δ 0 E I ( ) EI Se înocuiesc vaorie cacuate în reaţia (3.33) şi sistemu devine: 40
141 7 3EI 3 EI 3 X X 3 + EI EI X X EI EI 0 0 Se reovă sistemu (3.34) şi se determină necunoscutee static nedeterminate: 5 ; X 9 X 3 9 (3.34) Se revine a sistemu din figura Se fac secţiuni, se scriu expresiie momenteor încovoietoare, forţeor tăietoare şi axiae şi se studiaă variaţia. Diagrama de moment încovoietor x [ 0,] 5 9 ( x ) X x x 5 9 Se studiaă variaţia momentuui: ( 0) 0; ( ) [ 0,] ( x ) X x [ 0,] 3 9 ( x ) X x x 3 9 Se studiaă variaţia momentuui: ( 0) 0; ( ) [ 0,] ( ) X + X + Diagrama de variaţie a momentuui este preentată în figura
142 5/9 4/9 4/9 3/9 Figura Diagrama de forţe tăietoare Expresiie forţei tăietoare pe cee patru regiuni sunt: ( x ) T X T ( ) 0 ( x ) T X T ( ) Se repreintă variaţia forţei tăietoare şi se obţine diagrama din figura /9 3/9 T Figura
143 Diagrama de forţe axiae Pentru forţa axiaă se obţine: N( x ) 0 ( ) N X N( x ) 0 ( ) 5 9 N X + X 8 9 Diagrama forţei axiae este preentată în figura /9 N 8/9 Figura Deformaţia sistemeor pane Pentru cacuu deformaţiei grinior cotite şi a cadreor se pot foosi teoremee ui Castigiano. De exempu depasărie diferiteor puncte se cacueaă prin apicarea primei teoreme a ui Castigiano, cu ajutoru următoarei reaţii (dacă se negijeaă infuenţa forţei tăietoare): δ L P EI dx + P EA N N dx P 43
144 Observaţie: În cau când se doreşte determinarea depasării unui punct în care nu acţioneaă o forţă, se introduce în punctu respectiv o forţă fictivă, corespunătoare depasării. După efectuarea cacueor în reutatee obţinute forţa fictivă se anueaă. etoda ohr-axwe poate fi foosită de asemenea pentru cacuu deformaţiei sistemeor pane. Formuee sunt anaoage ceor foosite în cau bareor drepte. Astfe, depasarea δ a unui punct pe direcţia este dată de reaţia: unde: δ N n dx + EA m dx EI, N - momentu încovoietor şi forţa axiaă într-o secţiune oarecare x, pentru încărcarea sistemuui cu sarcinie reae; m, n - momentu încovoietor şi forţa axiaă, determinate în aceeaşi secţiune x, cu toate sarcinie nue, cu excepţia unei forţe egaă cu unitatea care acţioneaă în punctu în care se cacueaă depasarea pe direcţia. În mod simiar se cacueaă şi rotirea θ a unei secţiuni: θ N n dx + EA m dx EI De data aceasta m şi n repreintă momentu încovoietor şi respectiv forţa axiaă care apar într-o secţiune oarecare x, atunci când în secţiunea a cărei deformaţie vrem să o cacuăm acţioneaă un cupu, de moment ega cu unitatea. Observaţie: Dacă nu se cunoaşte direcţia în care se depaseaă punctu este necesar să se determine proiecţiie acestei depasări pe două direcţii fixe (de 44
145 exempu pe direcţie orinontaă δ h şi pe cea verticaă δ v ). Depasarea totaă este dată de reaţia: δ δ h + δ. v Probeme propuse:. Să se verifice bara de secţiune dreptunghiuară din figura Se cunosc: b m, h 0,5m, u 0,3m, v 0,m, P N, a 40Pa. v b u P h Figura Bara din figura 3.5 este comprimată excentric cu forţa P 350kN. Se cere să se trasee diagrama de variaţie a tensiunii normae în secţiune şi să se trasee sâmburee centra a secţiunii P 60 Figura Să se trasee sâmburee centra pentru secţiunie din figura 3.5. şi pentru o eipsă cu semiaxee a şi b. 45
146 0t 8t t 5t t t t t 8t Figura Să se cacuee tensiunie reutante în punctee,, 3, 4 ae unei secţiuni transversae pătratice (figura 3.53) pentru bara dreaptă soicitată a întindere excentrică de către forţa F 300kN F Figura Să se dimensionee grinda încastrată, încărcată cu o sarcină concentrată (figura 3.54). Se cunosc: F 75kN,,5m, α 30 o, a 0Pa, h b. F F h α b Figura
147 6. O bară este soicitată excent ric de forţa F 55kN (figura 3.55). Se cere să se cacuee tensiunea maximă din bară. În cacue nu se ţine cont de posibiitatea pierderii stabiităţii barei. Se cunosc: a 50mm, e,5mm. e F F a a Figura Să se dimensionee grinda profi U, soicitată ca în figura 3.56, pentru q,5n/mm, 0,9m, α 40 o, a 40Pa. q q 40º Figura Să se dimensionee grinda din oţe, profi I, soicitată ca în figura 3.57 d acă q 9kN/m, 0,7m, α 45 o, a 0Pa. q q q 45º Figura
148 9. O grindă simpu reemată este soicitată de forţee F 850N apicate într-un pan ce formeaă unghiu α 50 o cu axa verticaă a secţiunii transversae (figura 3.58). Grinda are secţiunea dreptunghiuară cu b 60mm şi h 80mm, iar 500mm. Cât este tensiunea maximă? F α F F Figura Să se trasee diagramee de eforturi (, T, N) a grinie cotite din figurie F q q 3 F Fq/ Fq q²/4 q²/ Figura q F Figura
149 q q Figura Să se cacuee depasarea pe verticaă a punctuui de apicaţie a forţei F de a grinda cotită din figura 3.6. Se cunosc: F 5kN, E 0 4 Pa,,m, ambee bare au secţiune pătrată cu a 300mm, F Figura Să se cacuee rotirea capătuui iber de a grinda cotită din figura Se cunosc: EI const., q,. q Figura
150 3. Să se trasee diagramee de eforturi (, T, N) a cadree static nedeterminate din figurie Toate baree au aceeaşi rigiditate a încovoiere. q q q q Figura q q q Figura q P 3 P / / Figura
151 F F q Figura q F F / / Figura P Figura
152 q q q Figura Pentru grinda cotită din figura 3.7 de secţiune transversaă dreptunghiuară cu h 0mm şi b 00m se cere să se cacuee tensiunie maxime şi minime din secţiunea pericuoasă. În cacue se va ţine cont numai de forţa axiaă şi de momentu încovoietor. Se cunosc: F q, m, E, 0 5 Pa, q,5kn/m. F q 4 Figura Pentru sistemu din figura 3.7 se cere să se cacuee reacţiunea din reaemu D şi depasarea pe verticaă a punctuui B. Se cunosc: F,, EI const. 5
153 F B D Figura Soicitări a care apar tensiuni pe direcţii diferite Soicitarea de încovoiere cu torsiune Bare cotite spaţiae Baree cotite spaţiae sunt formate din bare drepte cuprinse în pane perpendicuare îmbinate prin noduri rigide. Pentru această categorie de bare cotite pe ângă observaţiie preentate a baree cotite pane (cadree pane) trebuie să se ţină seama de faptu că prin efectu de nod rigid în spaţiu momentu încovoietor dintr-o bară se transmite ca moment de torsiune pentru bara care se afă într-un pan perpendicuar pe panu forţeor şi invers. Apicaţie: Să se trasee diagramee de eforturi şi să se dimensionee sistemu de bare din figura Sistemu este soicitat de forţa F care acţioneaă pe o direcţie perpendicuară pe panu format de sistem. Baree au secţiune circuară. Reovare: Grinda --3 este conţinută într-un pan, ea fiind soicitată în punctu de o forţă concentrată a cărei direcţie este perpendicuară pe panu (3). 53
154 3 x F x Figura Bara - este soicitată a încovoiere. omentu încovoietor în secţiunea x are expresia: x [ 0,] i ( x ) F x Se studiaă variaţia momentuui: i ( 0) 0; ( ) F i Bara -3 este soicitată a încovoiere şi torsiune. omentu încovoietor în secţiunea x are expresia: x [ 0,] i ( x ) F x Vaorie momentuui pe capetee intervauui sunt: i ( 0) 0; ( ) F i omentu de torsiune în aceeaşi secţiune este dat de reaţia ( x ) F const. t Observaţie: Se negijeaă efectu forţeor tăietoare. Forţee axiae în ambee regiuni sunt nue. 54
155 Diagramee de variaţie ae momenteor încovoietor şi de torsiune sunt preentate în figurie 3.74 şi F î F Figura F t Figura Secţiunea pericuoasă este în încastrare unde: t F, iar tensiunea tangenţiaă: τ W t p i max F, iar tensiunea normaă: W i max πd πd Pentru secţiunea circuară: W p ;W Wp W Pentru că apar tensiuni de natură diferită cacuu de reistenţă se face foosind reaţiie reutate din teoriie de reistenţă. Din teoria tensiunii tangenţiae maxime reută: 4 55
156 ech + 4τ W i + 4 W t p W i t + 4 W i W + Se înocuiesc vaorie de mai sus pentru momentee de încovoiere şi de torsiune şi se impune condiţia cunoscută: ech a reută: De unde: ech 3 ( F) + ( F) πd 3 3 F 3 πd a t d 3 3 F π a Cacuu arborior drepţi a torsiune cu încovoiere Pe un arbore drept intermediar (secundar), cu secţiune circuară, (figura 3.76) se afă montate două roţi dinţate. Roata primeşte mişcarea de a un pinion montat pe arboree primar (nefigurat) cum este preentat în figura Roata transmite mişcarea a o roată dinţată montată pe arboree terţiar nefigurat pe desen (figura 3.78). Se cere să se dimensionee arboree secundar ştiind că P,4kW, n 600rot/min, 00mm, α 30 o, ß 45 o, a 60Pa. Diametree de diviare ae roţior dinţate, sunt D d 50mm, D d 500mm. 4 Figura Arboree se afă într-o stare de soicitare compusă de torsiune cu încovoiere. Cacuu de reistenţă a arboreui se conduce pe etape. Se decompun 56
157 forţee în componenete situate în două pane reciproc perpendicuare, spre exempu în componente oriontae şi verticae (figurie 3.77, 3.78). T sinα T T α 0 T Dd 0 0 T cosα t T Dd / α Figura t Dd β T 0 t T Dd / T sinβ 0 0 β β t T T T cosβ Figura În figura 3.79 este indicată încărcarea arboreui (momentu de torsiune este constant pe ungimea dintre cee două roţi dacă se negijeaă frecarea în agăre). omentu de torsiune, în funcţie de puterea transmisă, se cacueaă cu reaţia stabiită în prima parte a cursuui de Reistenţa materiaeor: Înocuind vaorie date se obţine: t 30 P. π n Dar t 30,4 0 π 600 3,8N m,3 0 3 N mm Dd t,3 0 t t T T D 50 d 3 78,4 N 57
158 Dd t,3 0 t t T T 89,N D 500 T sinα d x T sinβ 0 t 3 0 T cosα T cosβ 4 Figura Detaiat schema de încărcare a arboreui este preentată în figura 3.80, fiind repreentate în ordine: încovoierea în panu xo, încovoierea în panu xo şi torsiunea. T sinα 0 0 T cosβ T sinβ T cosα t t 4 Figura
159 Se studiaă separate fiecare din cee trei soicitări şi se traseaă diagramee de variaţie ae eforturior. figura 3.8. Încovoiere în panu xo (figura 3.8) Se scriu ecuaţiie de echiibru şi se cacueaă reacţiunie. Se obţine: V ' T ) )V T + ' T T + V ' 5 + V T T 0 ' 7 0 V ' ' 0 V 3,3N 58,4N Diagrama de variaţie a momentuui încovoietor î este preentată în T / V ' 0 0 T 4 V ' î [N mm] V ' V ' x Figura 3.8. Încovoiere în panu xo (figura 3.8) Se scriu ecuaţiie de echiibru şi se cacueaă reacţiunie. Se obţine: V " T 3 ) + )V T 3 + " T T + V " T T V " 7 0 V 0 V " " 3N 4,4N 59
160 T 0 0 V " T 3 4 V " î [N mm] V " V " x Figura 3.8. figura 3.8. Diagrama de variaţie a momentuui încovoietor î este preentată în omentu încovoietor reutant re se afă prin compunerea punct cu punct a diagrameor î şi î. În orice punct re i i + (se compune după regua paraeogramuui), acesta exprimând mărimea momentuui încovoietor reutant care diferă de a o secţiune a ata atât ca mărime cât şi ca direcţie. Ţinând cont de diagramee din figurie 3.8 şi 3.8 se cacueaă: re re Reută: 569N mm. re max re N mm 5860,8N mm Diagrama de variaţie a momentuui de torsiune t este preentată în figura t t 4 t [N mm].300 Figura x 60
161 Secţiunea pericuoasă este în O unde din încovoiere reută W re max, iar din torsiune τ t W p. Pentru secţiunea circuară se cunosc: 3 πd πd W p ;W W p W Pentru că apar tensiuni de natură diferită cacuu de reistenţă se face foosind reaţiie reutate din teoriie de reistenţă. Din teoria tensiunii tangenţiae maxime reută: ire t ire t + ech + 4τ W + W p W W W Se înocuiesc vaorie de mai sus pentru momentu de încovoiere reutant, pentru momentu de torsiune şi se impune condiţia cunoscută: ech a , reută: ech πd πd ire t De unde: d 3 66,88 d,94mm. Probeme propuse. Să se trasee diagramee de eforturi (N,,, t ) pentru următoru sistem de bare. F F/ Figura
162 . Se dă bara cotită spaţiaă, având secţiune tubuară cu d 60mm, D80mm şi încărcarea conform figurii Se cere: - să se trasee diagramee de eforturi (N, T, T,,, t ); - să se cacuee vaoarea forţei capabie F cap, foosind teoria tensiunii tangenţiae maxime, uând în consideraţie numai efectu încovoierii şi torsiunii. Se cunosc: 0,5m şi a 50Pa. F 3F F Figura Se dă bara cotită spaţiaă, având secţiune circuară cu d 60mm, şi încărcarea conform figurii F F Figura Se cere: 6
163 - să se trasee diagramee de eforturi (N, T, T,,, t ); - să se verifice bara, foosind teoria tensiunii tangenţiae maxime, uând în consideraţie numai efectu încovoierii şi torsiunii. Se cunosc: FkN, 0,7m şi a 50Pa. 4. O bară cotită spaţiaă are forma, dimensiunie şi încărcarea din figura Se cere: - să se trasee diagramee de eforturi (N, T, T,,, t ); - să se dimensionee bara cotită, având secţiunea transversaă circuară, foosind teoria tensiunior tangenţiae maxime, uând în consideraţie numai efectu încovoierii şi torsiunii. Se cunosc: F,kN, 0,6m şi a 00Pa. F F F Figura O bară oriontaă, cotită, de secţiune circuară constantă, are forma, dimensiunie şi încărcarea din figura F 0F Figura
164 Se cunosc: d 80mm, 0,8m, a 40Pa. Se cer: - diagramee de eforturi i, t, N; - vaorea forţei capabie cu teoria tensiunior tangenţiae maxime (în cacue se va ţine seama atât de N cât şi de i şi t, 6. O bară cotită de secţiune circuară constantă, cu diametru d este soicitată ca în figura Se cer: - diagramee de eforturi i, t, N; - vaorea forţei capabie cu teoria tensiunior tangenţiae maxime (în cacue se va ţine seama atât de N cât şi de i şi t. Se cunosc: d 60mm, 0,5m, a 0Pa. P P P/ Figura Asupra arboreui I dintr-o cutie de vitee (figura 3.90) acţioneaă mementu de torsiune constant 800Nm. Arboree I transmite mişcarea arboreui II prin intermediu unui angrenaj cu roţi dinţate. Să se verifice arboree I dacă se cunosc: raa de diviare a roţii dinţate r 80mm, a 00mm, b 00mm, D 50mm, a 0Pa. În cacue se va considera că prin angrenare asupra roţii dinţate acţioneaă atât o forţă tangenţiaă cât şi una radiaă (P 0,4 P ). 64
165 Figura Se consideră arboree din figura 3.9, având moduu de rigiditate constant. Se cere diametru arboreui după teoria tensiunior tangenţiae maxime. Se cunosc: F 4kN, D 00mm, D 00mm, a 50Pa. D D F 0,3m 0,5m 0,m Q Figura Pentru bara ineară din figura 3.9, cu diametru exterior D şi diametru interior d 0,7D, având moduu de rigiditate constant, se consideră cunoscute p,, D. p p t p²/ Figura
166 Se cer: - momentu încovoietor reutant maxim; - tensiunea echivaentă maximă după teoria tensiunior tangenţiae maxime. 0. Pentru arboree de secţiune circuară din figura 3.93 se cunoaşte reistenţa admisibiă a materiauui a 40Pa. Se cer: - momentu echivaent maxim; - diametru arboreui. Se cunosc: α45 o, F 6 kn, D 00mm, D 50 mm. D α D F 0,3m 0,4m 0,m Q Figura Pentru arboree de secţiune circuară din figura 3.94 se cunosc F 8 kn, D 400mm, D 600mm, α45 o, a 00Pa. Se cer: - vaoarea forţei F ; - diametru arboreui. D α D F m m m F Figura
167 CAPITOLUL 4 BARE CURBE 4.. Generaităţi Baree curbe sunt bare a care axa este o curbă. În acest capito ne referim a bare curbe pane, atunci când axa barei se găseşte într-un pan care cuprinde şi forţee exterioare. Se deosebesc două categorii de bare curbe: un cerc); ρ - bare cu raa de curbură mică 0 h < (a aceste bare axa geometrică este ρ - bare cu raa de curbură mare 0 h (a aceste bare axa geometrică este o paraboă); pană. unde ρ repreintă raa de curbură, iar h înăţimea secţiunii transversae. În acest capito se vor studia baree a căror inie mediană este o curbă Se presupune că secţiunie transversae ae barei au o axă de simetrie în acest pan şi că bara este supusă a forţe situate în panu de simetrie. 67
168 În aceste condiţii într-o secţiune oarecare a barei eforturie vor fi (momentu încovoietor), N (forţa axiaă) şi T (forţa tăietoare). Toate aceste eforturi vor acţiona în panu de simetrie a barei. Tensiunie normae care apar, în aceste condiţii, într-o secţiune oarecare, a o bară rectiinie sunt date de reaţia ui Navier generaiată: N A unde: A aria secţiunii transvrsae; i + I I - momentu de inerţie faţă de axa neutră; - distanţa fibrei considerate a axa neutră. Această formuă, însă, se îndepărteă mut de reaitate în cau grinior cu curbură mare, vaorie obţinute fiind mut sub cee care apar efectiv în bară. 4.. Bare curbe sub formă de arc de cerc Stabiirea reaţiei de cacu corespunătoare acestei categorii de bare se face în ipotea că materiau din care este confecţionată bara este eastic şi ascută de egea ui Hooke. Se admite că rămâne vaabiă şi ipotea ui Bernoui (secţiunie pane, normae pe inia mediană a barei, rămân pane şi normae pe inia mediană deformată şi după ce bara s-a încovoiat). Se consideră o bară curbă cu curbură mare. Se ioeaă un eement de bară curbă prin două secţiuni care trec prin centru de curbură şi care fac între ee unghiu d ϕ (figura 4..). Se consideră că secţiunea din stânga este fixă. După deformaţie secţiunea AB (din dreapta) ajunge în poiţia A B (secţiunea AB rămâne pană după deformaţie respectând ipotea ui Bernoui, dar suferă o rotire şi ajunge în poiţia A B ). Se traseaă A B parae cu AB. În secţiune ucreaă o forţă axiaă N şi un moment încovoietor care materiaieaă acţiunea părţii îndepărtate asupra părţii de bară ioată şi care sunt cunoscute (se iau din diagramă). 68
169 A N A' N' dφ A" N" 0 N 0' x h/ C h/ B B" B' ρ dφ 0 Figura 4.. Se peacă de a următoaree două ecuaţiie de echivaenţă stabiite în prima parte a cursuui de Reistenţa materiaeor: N i da A (4.) da A Trebuie determinată egea de variaţie a tensiunii normae pe înăţimea secţiunii transversae (pe ăţimea secţiunii tensiunea se consideră constantă). Pentru reovarea probemei se face ape a studiu deformăţiei: se va exprima aungirea specifică a fibrei care se găseste a distanţa de axa barei (fibra N). Lungimea arcuui de cerc de pe axa barei se poate exprima astfe: ) ds o CO ρ dϕ (4.) iar ungimea arcuui de cerc de pe o fibră oarecare (fibra N) afată a distanţa de axa barei: ) ds N ( ρ + ) dϕ (4.3) unde: ρ - raa de curbură a iniei mediene. 69
170 Observaţie: Reaţiie (4.) şi (4.3) au putut fi scrise deoarece d ϕ fiind mic se pot aproxima arcee cu arce de cerc. Aungirea fibrei N se poate scrie astfe: ) '' ) ' ) ds NN NN + N' N" (4.4) Dar ) ' )' N N OO dso (4.5) În triunghiu O N N se poate scrie: ) N' N" tg dϕ dϕ (4.6) ) N' N" dϕ Din utimie trei reaţii reută: ds dso + dϕ (4.7) Prin urmare: ds ε ds + dϕ ε ρ dϕ + dϕ (4.8) o o Aungirea specifica a fibrei N este: ds ε ρ ϕ ϕ ε ρ ϕ ε o d + d o d + (4.9) ds ( ρ + ) dϕ ρ + ρ + dϕ Din egea ui Hooke se ştie că E ε şi ţinând cont de reaţia (4.9) se poate scrie: o sau ε E o ρ dϕ + ρ + ρ + dϕ E dϕ ρ ε o + (4.0) ρ + dϕ 70
171 Reaţia (4.0) exprimă egea de variaţie a tensiunii normae, pe înăţimea ρ secţiunii transversae, pentru bara curbă cu raa de curbură mică 0 h < curbă sub formă de arc de cerc). (bara Observaţie: Dacă se păstreaă ipotea secţiunii pane (ipotea ui Bernoui) reută o distribuţie hiperboică a tensiunii normae pe înăţimea secţiunii transversae a unei bare curbe sub formă de arc de cerc. Se înocuieşte reaţia (4.0) în cee două ecuaţii de echivaenţă din reaţia (4.) şi se obţine: N E i A E ρ dϕ ε o + da ρ + ρ + dϕ A ρ dϕ ε o + da ρ + ρ + dϕ Pentru reovarea ceor două integrae din sistemu (4.) se introduce notaţia: k se numeşte coeficient de formă a secţiunii (0<k<). (4.) k da A (4.) ρ + A Observaţie: Coeficientu de formă a secţiunii este o caracteristică pur geometrică a secţiunii. Sistemu (4.) poate fi scris sub următoarea formă: N E E ε i o o A ε ρ dϕ da + ρ + dϕ A A ρ dϕ da + ρ + dϕ da ρ + A da ρ + (4.3) 7
172 unde: (4.3) devin: A A d ϕ - rotirea specifică. Se obţine un sistem în care apar ca necunoscute mărimie ε o, d ϕ. dϕ Ţinând cont de reaţia (4.) integraee din cee două ecuaţii ae sistemu da ρ + ρ da ρ + A A ρ da ρ + ρ A + ρ ρ da ρ + ρ + da ρ + ρ A da + ρka ρka A ρ ( A + k A) ( + k) (4.4) Observaţie: În reaţia (4.4) integraa da repreintă momentu static a A secţiunii faţă de axa O care este axă centraă (trece prin centru de greutate) şi prin urmare este ero. S Se înocuiesc reaţiie (4.) şi (4.4) în sistemu (4.3) şi se obţine: N E E ε A i o ( + k) dϕ ka dϕ dϕ ε o ρ ka + ρka dϕ (4.5) Se reovă sistemu (4.5) şi se determină ε o, Înocuînd ε o, ε o N EA i + ρea dϕ N + dϕ EAρ ( + k) dϕ în reaţia (4.0) se obţine: dϕ d ϕ. Se obţine: dϕ keaρ i i N + + i A ρ ρk ρ + (4.6) 7
173 Reaţia (4.6) repreintă ecuaţia unei hiperboe şi dă repartiţia tensiunior normae pe înăţimea secţiunii transversae a unei bare curbe sub formă de arc de cerc. Observaţii: În cau bareor curbe cu curbură mare repartiţia tensiunior normae pe înăţimea secţiunii transversae nu mai este iniară, ca în cau grinior drepte, ci hiperboică. Îndiferent de feu încărcării de pe bara curbă tensiunie maxime apar întotdeauna a interioru barei. Secţiunea pericuoasă este cea în care momentu încovoietor este maxim. În cau bareor curbe axa neutră (ocu geometric a puncteor pentru care tensiunie sunt nue) nu mai coincide cu axa geometrică a barei (ca în cau bareor drepte) Cacuu coeficientuui de formă Secţiune dreptunghiuară (figura 4.) da d h b Figura 4.. Pentru o secţiunea dreptunghiuară de aria A b h se consideră un eement de arie dab d. Se peacă de a reaţia de definiţie a coeficientuui de formă (reaţia 4.) şi se fac înocuirie. Reută: 73
174 h h n h h h n h d h bh bh bd bh da A k h h h h A ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ Întotdeauna h < ρ şi prin urmare se poate face o descompunere în serii a fracţiei din reaţia precendentă. Se obţine: h 7 h 5 h 3 h h h n ρ ρ ρ ρ ρ ρ (4.7) Înocuind reaţia (4.7) în reaţia de cacu a coeficientu de formă se obţine:... h 7 h 5 h 3 k ρ ρ ρ (4.8) Observaţii: Reaţia (4.7) s-a obţinut prin descompunere în serii apicând reaţia: x 5 x 3 x x x x n În reaţia (4.8) infuenţa ceui de-a treiea termen este mică. În mod simiar se cacueaă coeficientu de formă pentru ate secţiuni. Astfe se obţine: - pentru secţiunea circuară de raă r:... r 64 5 r 8 r 4 k ρ ρ ρ (4.9) - pentru secţiunea trapeoidaă (figura 4.3): 74
175 Figura 4.3. ( ) ( ) ( b B e e n e h b B b h b B k ρ ρ ρ ρ ) (4.0) 4... Axa neutră a secţiunii unei bare curbe Se consideră reaţia (4.6) în care se face 0. 0 k N A i i ρ ρ ρ Se obţine: ( ) ( ) N k k N k i i + ρ ρ ρ (4.) Această expresie repreintă distanţa de a centru de greutate până a axa neutră. Se preintă câteva cauri particuare: a) Încovoierea pură În acest ca N 0 şi din reaţia precedentă reută: ( ) k k + ρ Se noteaă cu e această distanţă, adică: k k e + ρ b e h e B 75
176 Observaţie: În cau bareor curbe axa neutră nu trece prin centru de greutate a secţiunii, ca a grinie drepte. Ea se găseşte a distanţa e de centru de greutate şi întotdeauna de partea centruui de curbură (pentru că e>0). b) Întinderea (compresiunea) pură În acest ca 0 şi reută ρ, adică axa neutră trece prin centru de curbură. c) Este interesant de văut în ce condiţii axa neutră trece prin centru de greutate a secţiunii. Pentru aceasta este necesar ca 0 adică N ρ 0. Reută că, pentru a fi îndepinită această condiţie, sistemu de forţe exterioare trebuie să se reducă în secţiunea respectivă a o forţă N care trece prin centru de curbură. d) Cau particuar când axa neutră este aruncată a infinit. Aceasta are oc când numitoru reaţiei (4.) se anueaă, respectiv când: kρ + k ( + k) i k ρ N ( + k) N ( + k) ( N e) 0 adică atunci când sistemu de forţe exterioare se reduce în secţiunea respectivă a o forţă N care trece a distanţa e de centru de greutate (deci întâneşte axa neutră corespunătoare cauui a, a încovoierii pure). Apicaţii:. Se consideră bara curbă din figura 4.4. R Figura 4.4. F 76
177 Să se cacuee tensiunie maxime şi minime în secţiunea pericuoasă şi să se verifice bara. Se cunosc: R0,5m, F 5kN, a 80Pa. Bara are secţiunea transversaă dreptunghiuară cu ăţimea de 0mm şi înăţimea de 00mm. Reovare: Se traseaă diagramee de moment încovoietor şi forţă axiaă pentru a stabii secţiunea pericuoasă. Observaţii: Pentru trasarea diagramei forţei axiae se păstreaă definiţia şi regua de semne stabiite a baree drepte. Pentru a stabii semnu momentuui încovoietor într-o secţiune se imagineaă o fibră din interioru barei care se repreintă punctat şi se adoptă o convenţie de semne invers ca a grinie cotite: dacă fibra este întinsă momentu se consideră negativ, iar dacă fibra este comprimată momentu se consideră poitiv. Spre deosebire de grinie drepte şi cee cotite variabia, în funcţie de care se exprimă eforturie în secţiune, este unghiu a centru. Diagramee se vor repreenta pe conturu barei curbe. În secţiunea α (figura 4.5) expresia momentuui încovoietor este: t n R α F F t Figura 4.5. [ 0 ] α,π ( α ) F R ( cosα ) 77
178 Vaorie momentuui pe capetee intervauui sunt: ( 0) 0; ( π / ) F R; ( π ) F R Pentru a trasa diagrama de moment încovoietor se consideră conturu barei fără încărcare şi reemare. Locu unde se repreintă vaorie poitive şi negative ae momentuui nu se impune: repreentarea se face în aşa fe încât diagrama să reute cât mai cară (în diagramă să avem cât mai puţine suprapuneri). Pentru bara curbă preentată s-a aes ca vaorie poitive ae momentuui să fie repreentate a exterior (figura 4.6.). În aceeaşi secţiune forţa axiaă este: Variaţia forţei este: N N t ( α ) F F cosα ( 0) F;N( π / ) 0;N( π ) F FR Figura 4.6. Diagrama forţei axiae este preentată în figura 4.7. N F Figura 4.7. F 78
179 Determinant în cacuu barei curbe este momentu încovoietor. Secţiunea pericuoasă este în încastrare unde imax FR. În aceeaşi sctiune N F. Se cacueaă raportu h ρ (pentru bara studiată ρ R ): ρ h R h < 0 Prin urmare pentru cacuu barei curbe trebuie foosită reaţia (4.6). Se fac înocuirie şi se obţine: N + A R F A + k + kr i i R + R + A F + FR R Se cacueaă cu reaţia (4.9) coeficientu de formă: k 3 h R + 5 h R h R FR kr R + 7 (4.) 4 6 ( 0,) + ( 0,) + ( 0,) 0, Pentru cacuarea tensiunior maxime şi minime se înocuiesc în reaţia (4.) vaorie corespunatoare pentru ( este poitiv în sus de a raa de curbură). În fibra exterioară se obţine: F ext ( 50) ,8Pa A k ,00335 În fibra interioară ( -50) reută: int F ( 50) 63,33Pa A k , Se observă că. Pentru efectuarea cacuui de verificarea a barei se max int impune condiţia cunoscută: obţine:. Cu vaorie din apicaţia studiată se max max 63,33Pa < a 80Pa Inegaitatea este îndepinită şi prin urmare bara curbă reistă. a 79
180 . Să se dimensionee bara curbă (cârigu) din figura 4.8. Se cunosc: R00mm, F 3kN, a 80Pa. Secţiunea câriguui este circuară. R F Figura 4.8. Reovare: Se traseaă diagramee de moment încovoietor şi forţa axiaă pentru a stabii secţiunea pericuoasă. În cee două secţiuni (figura 4.9), expresia momentuui încovoietor este: R t n β α F t F Figura 4.9. α [ 0, π / ] [ 0 ] β,π ( α ) 0 ( β ) F R sin β Vaorie momentuui pe capetee intervauui sunt: 80
181 ( 0) 0; ( π / ) F R; ( π ) 0 Pentru bara curbă preentată s-a aes ca vaorie negative ae momentuui să fie repreentate a exterior (figura 4.0.). F R Figura 4.0. În aceeaşi secţiuni (figura 4.9) forţa axiaă este: Variaţia forţei este: N N ( α ) 0 t ( β ) F F sin β ( 0) 0;N( π / ) F; N( π ) 0 N Diagrama forţei axiae este preentată în figura 4.. F N Figura 4.. raportu În secţiunea pericuoasă imax FR şi N F. Deoarece nu se cunoaşte ρ R h d nu se poate precia dacă este necesar să se ucrea cu reaţia (4.6) stabiită pentru baree curbe. În acest ca se face o predimensionare cu 8
182 reaţia ui Navier generaiată (aceasta este formua cea mai simpă foosită pentru cacuu bareor curbe cu raă mare de curbă): N i max max + a A W Aşa cum s-a preciat în capitou anterior, a cacuu grinior cotite, în prima etapă a cacuuui termenu provenit din soicitarea axiaă (N/A) se negijeaă în raport cu termenu provenit din încovoiere ( imax /W ). Este expicabi acest mod de abordare a cacuui prin faptu că s-a constatat că Se obţine: i max F R 3F R a a d 3 3 W 3 πd π a 3 N <<< i max. A W π , Se majoreaă diametru pentru că nu s-a ţinut cont şi de soicitarea axiaă. Se adoptă d 8mm şi se face un cacu de verificare cu reaţia ui Navier generaiată. Se obţine: ef N A π 8 i + W 3 max F πd π FR πd 3 3 4F πd 3FR + 3 πd 44Pa < 80Pa mm Se cacueaă raportu h ρ (pentru bara studiată ρ R,h d 8mm ): ρ h R d 00 8 < 0 Prin urmare pentru cacuu barei curbe având secţiunea circuară cu diametru d8mm trebuie foosită reaţia (4.6). πd Se fac înocuirie ( A, i FR,N F, ρ R ) şi se obţine: 4 8
183 R k d 4F R kr FR R FR F 4 d R kr R N A i i π π (4.3) Se cacueaă cu reaţia (4.0) coeficientu de formă (se negijeaă infuenţa ceui de-a treiea termen): 0, k 0, R d 8 R d 4 r 8 r 4 k ρ ρ Aşa cum s-a preciat anterior, indiferent de feu încărcării de pe bara curbă tensiunie maxime apar întotdeauna a interioru barei ( -d/), şi prin urmare înocuind în reaţia (4.3) se obţine: 80Pa 70Pa 70Pa , d R d k d 4F a max 3 max < + + π π Inegaitatea este îndepinită şi prin urmare vaoarea stabiită pentru diametru barei curbe d 8mm este corectă. Observaţie: Dacă într-o apicaţie, după efectuarea cacuuui de predimensionare, inegaitatea a max nu este îndepinită atunci se reia cacuu majorând vaoarea diametruui şi parcurgând aceeaşi etape. 3. Se consideră o bară curbă de secţiune transversaă dreptunghiuară cu ăţimea de 60mm şi înăţimea de 80mm. Bara având R00mm este soicitată într-o secţiune de un momentu încovoietor poitiv î 0 6 N mm şi de o forţa axiaă de întindere N N. Să se cacuee tensiunie maxime şi minime în 83
184 secţiunea indicată. Ce erori s-ar face dacă s-ar foosi pentru cacu formua de a grinie drepte? k 3 se obţine: Reovare: Se cacueaă cu reaţia (4.9) coeficientu de formă: h R + 5 h R h R ( 0,4 ) + ( 0,4 ) + ( 0,4 ) 0, 059 Pentru cacuu barei curbe se fooseşte reaţia (4.6). Se fac înocuirie şi N + A R i i + kr R ,059 0, , Pentru cacuarea tensiunior maxime şi minime se înocuiesc în reaţia precedentă vaorie corespunatoare pentru ( este poitiv în sus de a raa de curbură). În fibra exterioară se obţine: În fibra interioară reută: 40 ( 40), ,3,5Pa ext int 40 ( 40),08 35,3,4Pa 0 40 Dacă se fooseşte reaţia de a grinie drepte: N A + I i cu I mm 4 se obţine: 3 6 ext ( 40) + 5,65Pa
185 int ( 40) 5,65Pa Erorie faţă de formua exactă sunt de 5,69% pentru tensiunea de întindere şi de 50,7% pentru cea de compresiune Deformaţia bareor curbe sub formă de arc de cerc Pentru cacuu deformaţiei bareor curbe sub formă de arc de cerc se pot foosi teoremee ui Castigiano. De exempu depasărie diferiteor puncte ae bareor curbe se cacueaă prin apicarea primei teoreme a ui Castigiano, cu ajutoru următoarei reaţii (dacă se negijeaă infuenţa forţei axiae şi a forţei tăietoare): L δ P EI s o ds P EI ϕ o Rdϕ P etoda ohr-axwe poate fi foosită de asemenea pentru cacuu deformaţiei bareor curbe sub formă de arc de cerc. Formuee sunt anaoage ceor foosite în cau bareor drepte, cu observaţia că eementu de bară dreaptă dx se înocuieşte cu eementu de arc ds. Astfe, depasarea δ a unui punct pe direcţia este dată de reaţia: unde: δ N n ds + EA m ds EI, N - momentu încovoietor şi forţa axiaă într-o secţiune oarecare α, pentru încărcarea barei curbe cu sarcinie reae; m, n - momentu încovoietor şi forţa axiaă, determinate în aceeaşi secţiune α, cu toate sarcinie nue, cu excepţia unei forţe egaă cu unitatea care acţioneaă în punctu în care se cacueaă depasarea pe direcţia. În mod simiar se cacueaă şi rotirea θ a unei sectiuni: 85
186 θ N n ds + EA m ds EI De data aceasta m şi n repreintă momentu încovoietor şi respectiv forţa axiaă care apar într-o secţiune oarecare α, atunci când în secţiunea a cărei deformaţie vrem să o cacuăm acţioneaă un cupu, de moment ega cu unitatea. Observaţie: Dacă nu se cunoaşte direcţia în care se depaseaă punctu este necesar să se determine proiecţiie acestei depasări pe două direcţii fixe (de exempu pe direcţie orinontaă totaă este dată de reaţia: δ h şi pe cea verticaă δ v ). Depasarea δ δ h + δ v 4.4. Diagrame de eforturi a bare curbe sub formă de arc de cerc Baree curbe sub formă de arc de cerc se casifică astfe: bare curbe static determinate; bare curbe static nedeterminate, care se pot casifica a rându or astfe:. bare curbe static nedeterminate exterior (necunoscute sunt reacţiunie din reaeme);. bare curbe static nedeterminate interior (necunoscute sunt eforturie din bare); 3. bare curbe static nedeterminate exterior şi interior (necunoscute sunt atât reacţiunie din reaeme cât şi eforturie din bare). Ridicarea nedeterminării se face utiiând teoremee ui Castigiano, parcurgând aceeaşi etape ca şi în cau grinior drepte şi a grinior cotite. Pentru studiu bareor curbe sub formă de arc de cerc trebuie trasate diagramee de moment încovoietor şi forţă axiaă, iar pentru verificarea 86
187 diagramei de moment încovoietor şi diagrama de forţă tăietoare. Pentru trasarea diagrameor de forţă axiaă şi forţă tăietoare rămân vaabie definiţiie şi convenţiie de semne stabiite a grinie drepte. Pentru a stabii semnu momentuui încovoietor într-o secţiune se imagineaă o fibră din interioru barei care se repreintă punctat. Dacă această fibră este întinsă momentu se consideră negativ, iar dacă fibra este comprimată momentu se consideră poitiv. Spre deosebire de grinie drepte şi cee cotite variabia, în funcţie de care se exprimă eforturie în secţiune, este unghiu a centru. Cee trei diagrame (moment încovoietor, forţă tăietoare şi forţă axiaă) vor fi repreentate pe conturu barei curbe fără încărcare şi reemare. Locu unde se repreintă vaorie poitive şi negative ae eforturior nu este impus: repreentarea se face în aşa fe încât diagramee să reute cât mai care (în diagrame să avem cât mai puţine suprapuneri). Rămân vaabie toate reguie de verificare pentru diagramee de eforturi stabiite în cau grinior drepte Bare curbe sub formă de arc de cerc static determinate. Să se trasee diagramee de eforturi (moment încovoietor, forţă tăietoare şi forţă axiaă) pentru bara curbă din figura 4.. n t F t α R F n F Figura 4.. Reovare: 87
188 Pe ungimea barei avem o singură regiune şi prin urmare nu este necesar cacuu reacţiunior din încastrare. Se face o secţiune, variabia în funcţie de care se exprimă cee trei eforturi fiind unghiu a centru α. Expresia momentuui încovoietor este: [ 0 ] α,π ( α ) F R sinα Vaorie momentuui pe capetee intervauui sunt: ( 0) 0; ( π / ) F R; ( π ) 0 Diagrama de moment încovoietor este preentată în figura 4.3. F R Figura 4.3. În aceeaşi secţiune (figura 4.) forţa axiaă este egaă cu proiecţia forţei F pe direcţia tangentei a bara curbă în secţiune: Variaţia forţei este: N t ( α ) F F sinα ( 0) 0;N( π / ) F;N( π ) 0 N Diagrama forţei axiae este preentată în figura 4.4. F N Figura
189 Forţa tăietoare este egaă cu proiecţia forţei F pe direcţia normaei a bara curbă în secţiune: Variaţia forţei este: T n ( α ) F F cosα ( 0) F;T ( π / ) 0;T ( π ) F T Diagrama forţei tăietoare este preentată în figura 4.5. T F Figura 4.5. F. Să se trasee diagramee de eforturi (moment încovoietor, forţă tăietoare şi forţă axiaă) pentru bara curbă din figura 4.6. q R Figura 4.6. Reovare: Se figureaă reacţiunie din încastrare (figura 4.7). Se scriu ecuaţiie de echiibru independente şi se cacueaă reacţiunie: H q R 0 H qr V 0 qr R qr 0 89
190 q R H Figura 4.7. V În cee două secţiuni (figura 4.8), expresia momentuui încovoietor este: q n t t n α β H Figura 4.8. V α [ 0, π / ] ( α ) R sinα qr sinα qr α sin Vaorie momentuui pe capetee intervauui sunt: ( 0) 0; ( π / ) β [ 0, π / ] qr qr ( β ) + H R sin β + qr sin β qr Variaţia momentuui încovoietor este: ( 0) ; ( π / ) Din condiţia ( β ) 0 reută: qr o ( β ) + qr sin β 0 sin β α 30 Diagrama momentuui încovoietor este preentată în figura 4.9. qr 90
191 qr²/ 30º qr²/ Figura 4.9. În aceeaşi două secţiuni forţa axiaă este: N ( α ) qr sinα sinα qr sin α având pe capetee intervauui următoaree vaori: Variaţia forţei este: N ( 0) 0;N( π / ) qr N N t ( β ) H qr sin β ( 0) 0;N( π / ) qr Diagrama forţei axiae este preentată în figura 4.0. qr N Figura 4.0. Forţee tăietoare sunt egae cu proiecţiie forţeor pe direcţia normaei a bara curbă în secţiunea respectivă şi au următoaree expresii: Variaţia forţei este: T qr ( α ) qr sinα cosα sin α 9
192 T T ( 0) 0;T ( π / ) ' ' ( α ) qr cos α ;T ( α ) π T 4 Variaţia forţei este: qr 0 T π π 0 cos α 0 α α 4 n ( β ) H qr cos β ( 0) qr;t ( π / ) 0 T Diagrama forţei tăietoare este preentată în figura 4.. qr/ 45º T qr Figura Să se trasee diagramee de eforturi pentru bara curbă soicitată cu o sarcină distribuită radia (figura 4.). q R Figura 4.. Reovare: 9
193 Se figureaă reacţiunie din reaeme (figura 4.3). df H df V H α dα df R V V Figura 4.3. Se scriu ecuaţiie de echiibru independente şi se cacueaă reacţiunie ţinând cont că: H V + π o + V df qr dα df df H V qr cosα dα qr sinα dα Din ecuaţiie de proiecţii de forţe pe oriontaă şi verticaă se obţine: qrcosα dα 0 H π o qr sinα dα 0 V Din motive de simetrie π o + V qr cosα dα qrsinα π V V, prin urmare o π o 0 qr sinα dα qrcosα V V qr. π o qr Expresia momentuui încovoietor, ţinând cont de notaţiie din figura 4.4, este următoarea: [ 0 ] α,π 93
194 ( α ) V ( R Rcosα ) qr dp R sin( α β ) ( cosα ) + qr sin( α β )dβ qr ( cosα ) + qr cos( α β ) qr ( cosα ) + qr ( cosα ) 0 Reută ( ) 0 T ( α ) 0 α o + α o α deci bara curbă nu este soicitată a încovoiere. α o dp H β α dβ R V V Figura 4.4. Expresia forţei axiae este: N ( α ) α V cosα dp sin( α β ) qrcosα qr sin( α β )dβ qrcosα qrcos o α ( α β ) qrcosα qr( cosα ) qr o Se constată ca forţa axiaă este constantă pe toată ungimea barei, aceasta fiind soicitată a compresiune de forţa qr. Diagrama este preentată în figura 4.5. α o N qr Figura
195 4. Să se trasee diagramee de eforturi pentru bara curbă din figura 4.6. Bara este soicitată de o sarcină distribuită pe ungime de arc (greutatea proprie). q R Figura 4.6. Reovare: Expresia momentuui încovoietor, ţinând cont de notaţiie din figura 4.7, este următoarea: α [ 0, π / ] α ( α ) dp ( Rcos β Rcosα ) qr ( cos β cosα ) qr o (sin β α o β cosα α o qr α o ( sinα α cosα ) dβ df α β dβ Figura 4.7. Vaorie momentuui pe capetee intervauui sunt: qr ( 0) ; ( π / ) qr Diagrama de variaţie a momentuui încovoietor este preentată în figura
196 qr² Figura 4.8. În secţiune expresia forţei axiae este: N Se studiaă variaţia forţei axiae: N α α ( α ) df cosα qr cosα dβ qr α cosα o ( 0) 0;N( / ) o π π π π 0;N qr 4 4 Diagrama forţei axiae este preentată în figura 4.9. qr 8 πqr/8 45º N Figura 4.9. Forţa tăietoare este egaă cu proiecţia forţei pe direcţia normaei a bara curbă în secţiune şi are următoarea expresie: T Variaţia forţei este: α α ( α ) df sinα qr sinα dβ qr α sinα o o 96
197 T ( 0) 0;T ( π / ) π qr Diagrama forţei tăietoare este preentată în figura qrπ/ T Figura Bare curbe sub formă de arc de cerc static nedeterminate exterior La baree curbe static nedeterminate exterior necunoscute sunt reacţiunie din reaeme. Ridicarea nedeterminării se face utiiand teoremee ui Castigiano. După ce această etapă este încheiată (reacţiunie sunt cacuate) probema se aboedeaă în aceaşi mod ca şi în cau bareor curbe static determinate. De reţinut: La baree curbe cu raa de curbură mare se negijeaă infuenţa forţei axiae, atunci când se apică teoremee ui Castigiano Se consideră bara din figura 4.3. Se figureaă reacţiunie în cee două articuaţii şi se scriu ecuţiie de echiibru independente: H V A A H qr + V A B + qr 0 B 0 0 V B R qr R qr qr Din ecuaţia de proiecţii de forţe pe verticaă se cacueaă R 0 V V A B 7 4 qr 3 qr. 4 97
198 q qr qr H A α R β H B V A V B Figura 4.3. Rămâne ecuaţia de proiecţii de forţe pe oriontaă în care sunt două necunoscute, deci prin urmare probema studiată este simpu static nedeterminată. Se aege ca necunoscută static nedeterminată reacţiunea H A. Se exprimă H B din ecuaţia de proiecţii de forţe pe oriontaă, funcţie de necunoscuta aeasă. Reută: H qr + (4.4) B H A Se apică prima teorema a ui Castigiano în raport cu necunoscuta static nedeterminată aeasă. Se poate scrie: L H A 0 EI π o π ( ) ( α ) ( ) ( β ) α ds + β ds (4.5) H A H o A Se scriu expresiie momenteor încovoietoare pe cee două regiuni şi se cacueaă derivatee parţiae ae acestora în raport cu necunoscuta static nedeterminată aeasă. Se obţine: α [ 0, π / ] ( α ) V R( cosα ) 3 qr 4 H ( α ) A A ( cosα ) + H R sinα A + H A R sinα R sinα + qr sinα R sinα + qr sin α 98
199 β [ 0, π / ] ( β ) V ( R Rcos β ) + H R sin β qr ( cos β ) + ( H + qr) H ( β ) A B R sin β B 7 4 A R sin β Se înocuiesc momentee încovoietoare şi derivatee parţiae în reaţia 4.5, se cacueaă cee două integrae şi se determină reacţiunea H A. Din reaţia 4.4 se determină H B. Din acest moment se continuă cacuu a fe ca a o bara curbă static determinată: se înocuiesc cee două reacţiuni în expresiie momenteor încovoietoare, se studiaă variaţia acestora şi se traseaă diagrama de variaţie. Expresiie forţeor axiae şi tăietoare se scriu în mod simiar ca a o bară curbă static determinată. Aceste expresii, pentru bara studiată, sunt: N N ( α ) V A cosα H sinα qr sinα sinα 7qR 4 3qR 4 cosα H ( β ) V cos β H sin β cos β H sin β qr sin β respectiv: T T ( α ) B A B ( β ) V sin β + H cos β sin β + H cos β + qrcos β A A sinα qr sin 3qR VA sinα H A cosα qr sinα cosα sinα H A cosα qr sinα cosα 4 7qR B B A 4 Şi în cau ceor două forţe se înocuieşte reacţiunea H A în cee patru expresii, se studiaă variaţia acestora şi se traseaă diagramee de variaţie pentru forţa axiaă şi tăietoare. Se recomandă să se finaiee această apicaţie de către studenţi. α Bare curbe sub formă de arc de cerc static nedeterminate interior Baree curbe static nedeterminate interior sunt bare curbe închise a care necunoscute sunt eforturie din bară. Formarea unui capăt se face prin secţionarea 99
200 barei curbe şi prin introducerea ceor trei eforturie din bare: momentu încovoietor, forţa tăietoare şi forţa axiaă. În cau genera aceste bare sunt tripu static nedeterminate. Ridicarea nedeterminării se face utiiand teoremee ui Castigiano. În cau în care este posibi se vor foosi observaţiie făcute în Capitou 3 a grinie cotite (cadree) simetrice şi antisimetrice. Astfe: - dacă bara curbă admite o axă de simetrie secţiunea se face pe această axă, forţa tăietoare este ero şi gradu de nedeterminare se reduce a doi. În acest ca diagramee de momentu încovoietor şi forţă axiaă sunt simetrice, iar diagrama de forţă tăietoare antisimetrică; - daca bara curbă este încărcată antisimetric se recomandă să fie studiată prin secţionare pe axa de antisimetrie ceea ce reduce gradu de nedeterminare. Pe axa de antisimetrie momentu încovoietor şi forţă axiaă sunt nue, sistemu obţinut fiind simpu static nedeterminat. Barei îi corespunde o diagramă de forţă tăietoare simetrică şi diagrame ae momentuui şi forţei axiae antisimetrice Apicaţie: Să se trasee diagramee de eforturi pentru ineu din figura 4.3. F F R F F Figura 4.3. Reovare: Ţînând cont de faptu că bara curbă considerată are dubă simetrie este suficient să se studiee pe un sfert de bară. Se parcurg următoaree etape: 00
201 - se secţioneaă bara după axa verticaă de simetrie şi se figureaă cee două eforturi care apar şi N, forţa tăietoare fiind ero (figura 4.33). F N F N F F N F F N Figura Din echiibru de forţe, pe direcţie oriontaă, a unei jumătăţi de bară reută: N F 0 N - se secţioneaă jumătatea de bară după axa oriontaă de simetrie aşa cun este indicat în figura Se figureaă eforturie care apar şi N, ce de a treiea, forţa tăietoare, fiind ero. F/ F F/ N F/ N F F/ F Figura Din echiibru de forţe pe direcţie verticaă a unui sfert de bară reută N F 0
202 - se ajunge să se studiee sfertu din bară din figura 4.35, pentru care se scrie echiibru sub forma unei sume de moment. Se obţine: F + F R R 0 (4.6) F n t F/ F α F/ Figura Se obţine o ecuaţie cu două necunoscute, prin urmare s-a ajuns a o bară simpu static nederminată. Se ridică nedeterminarea apicând cea de a doua teoremă a ui Castigiano. Se aege ca necunoscută static nedeterminată. Expicitând teorema ui Castigiano, în raport cu necunoscuta static nedeterminată aeasă, se poate scrie: L 0 EI ( α ) ( α ) ds s (4.7) Se scrie expresia momentuui încovoietor în secţiune, pe baa notaţiie din figura 4.35 şi se cacueaă derivata parţiaă a momentuui în raport cu α [ 0, π / ] ( α ) F R( cosα ) ( α ) + F R sinα Se fac înocuirie în reaţia 4.7 şi se fac cacuee. Reută: (4.8) 0
203 L 0 0 EI π o π FR R + + FR ( cosα ) sinα FR π o FR ( cosα ) π + FR π FR π 0 R + FR + FR π 3 FR FR πfr 3FR FR π π π Rdα sinα ( π 3) Înocuind momentu în ecuaţia de echiibru dată de reaaţia (4.6) se obţine: F 3FR R FR π FR FR 3 π Se fac înocuirie în expresia momentuui încovoietor dată de reaţia (4.8) şi se studiaa variaţia acestuia pe ungimea sfertuui de bara curbă. Se obţine: ' ' ( α ) FR ( α ) F R( cosα ) FR ( π 3) π F R ( 0) + F F R sinα ( cosα ) + R sinα ( ) FR π 3 π π 3FR FR FR F R + π F R sinα FR FR 3FR π o ( α ) 0 F R sinα 0 cosα sinα tgα α 6 Se traseaă diagrama de moment încovoietor pe sfertu de bară curbă şi apoi prin simetrie pe ceeate trei sferturi. π o 03
204 În aceeaşi secţiune se scriu expresiie forţei axiae şi forţei tăietoare ca fiind suma proiecţiior forţeor, din partea stângă a secţiunii, pe direcţia tangentei, respectiv normaei a axa barei în secţiune. Se obţine: N F ( α ) F cosα sinα având pe capetee intervauui următoaree vaori: N( 0) F;N( π / ) T F F ( α ) F sinα cosα Variaţia forţei este: T ( 0) ;T ( π / ) F Diagramee forţei axiae şi forţei tăietoare se repreintă pe sfertu de bară şi apoi prin simetrie, pentru forţa axiaă şi prin antisimetrie, pentru forţa tăietoare, pe ceeate trei sferturi. F Probeme propuse:. Să se trasee diagramee de eforturi pentru baree curbe sub formă de arc de cerc din figurie F R F R Figura F R R Figura
205 F R F R Figura F R F R F 3R F Figura q R q R Figura q q R R Figura
206 3R R q Figura 4.4. q q R R Figura Să se trasee diagramee de eforturi pentru bara curbă sub formă de semicerc din figura şi să se dimensionee bara ştiind că secţiunea transversaă este circuară. Se cunosc: F kn, R 700mm, a 60Pa. F R Figura Să se cacuee depasarea pe verticaă a punctuui de apicaţie a forţei F pentru sistemu din figura Se cunosc F, R, EI const. 06
207 R R F Figura Să se cacuee rotirea capătuui iber pentru sistemu din figura Se cunosc F, R, EI const. R F R Figura Bare curbe cu raă mare de curbură. Arce paraboice. ρ Pentru aceste bare axa geometrică este o paraboă şi 0 h ( ρ repreintă raa de curbură, iar h înăţimea secţiunii transversae). Prin construcţia or se reduce momentu încovoietor în secţiune, dar apare în aceaşi timp şi o forţă axiaă. Din această cauă arcee paraboice sunt preferate grinior drepte atunci când deschiderie dintre reaeme sunt foarte mari. Arcee paraboice se cacueaă aproximativ cu formua de a grinie drepte (reaţia ui Navier generaiată): N i + (4.9) A I 07
208 sau Se consideră arcu paraboic din figura N + i (4.30) A W A x C f x B Figura În studiu acestei categorii de bare curbe se fooseşte următoarea terminoogie specifică: Punctu ce mai îndepartat de inia AB (care uneşte punctu A, punctu de început a arcuui şi punctu B, punctu de sfârşit a arcuui) se numeşte cheia arcuui (punctu C). Ordonata punctuui C se numeşte săgeata arcuui (f). Distanţa pe oriontaă dintre punctee A şi B se numeşte deschiderea arcuui (). Pentru a stabii ecuaţia arcuui se porneşte de a ecuaţia generaă a unei paraboe de gradu doi în care se introduc condiţiie iniţiae ţinând cont de figura 4.47: o paraboă cu vârfurie simetrice care trece prin A, B şi care a mijoc este f. Ecuaţia generaă a unei paraboe de gradu doi este: A x + B x + C iar condiţiie iniţiae, pentru situaţia studiată se pot exprimă astfe: x 0 0 x 0 x / f (4.3) 08
209 Se înocuiesc pe rând condiţiie în reaţia (4.3) şi se obţine: x 0 0 C 0 x 0 A x / Se înocuieşte B în utima reaţie. Reută: f A A 4 f + B 0 B A f A + B 4 4 f A A 4 B A Se înocuiesc vaorie ceor trei coeficienţi în reaţia (4.3). Reută: 4 f 4 f 4 f 4 fx x + x ( x) (4.3) Reaţia (4.3) repreintă ecuaţia generaă a unui arc paraboic. Ca şi a ceeate categorii de bare, cacuu arceor paraboice începe cu determinarea reacţiunior urmată de trasarea diagrameor de eforturi. În genera arcee paraboice sunt simpu static nedeterminate, ee fiind articuate a ambee capete. figura Se consideră arcu paraboic, încarcat cu o sarcină oarecare, preentat în H A α H B V A x V B V A x V B Figura
210 Se figureaă reacţiunie din articuaţii, ee putând fi cacuate din ecuaţiie de echiibru. Reută: H V V A B A H B B A 0 H A H B H unde A, B repreintă momentu forţeor exterioare faţă de A şi respectiv B. Din ecuaţiie de echiibru se observă că H rămâne ca necunoscută static nedeterminată. Pentru ridicarea nedeterminării se apică prima teoremă a ui Castigiano. Se face o secţiune x şi se scrie expresia momentuui încovoietor ( este ordonata arcuui în dreptu secţiunii x): ' ( x,) V x H ( x) (4.33) unde: (x) momentu forţeor de a stânga secţiunii în raport cu secţiunea x. Se consideră grinda echivaentă - o grindă dreaptă simpu reemată şi încărcată a fe. Pentru această grinda momentu încovoietor în secţiunea x se poate scrie: Prin urmare: A ' ( x) V x ( x) A ( x, ) ( x) H (4.34) Observaţii: Reaţia (4.34) îndică faptu că momentu încovoietor într-o secţiune a arcuui paraboic este ega cu momentu dintr-o grindă dreaptă simpu reemată cu aceeaşi încărcare (grinda echivaentă) din care se scade H. Reaţia (4.34) indică faptu că momentu încovoietor într-o secţiune a arcuui paraboic este mai mic decat momentu încovoietor din grinda dreaptă simpu reemată cu aceeaşi încărcare şi aceeaşi deschidere ceea 0
211 ce conduce a dimensiuni mai mici ae secţiunii transversae. Prin urmare arcu paraboic este mai economic decât grinda dreaptă. Se duce tangenta a secţiune în secţiune care face unghiu α cu oriontaa (figura 4.48). Expresia forţei axiae în secţiune se poate scrie: N x A o ( x,) H cosα V sinα + q( x) ds sinα (4.35) Cum săgeata arcuui este mică, reută că unghiu α este foarte mic şi prin urmare: Cu acestea reaţia (4.35) devine: sinα 0;cosα N ( x, ) H (4.36) Se apică prima teoremă a ui Castigiano uând în consideraţie infuenţa momentuui încovoietor şi a forţei axiae (se negijeaă infuenţa forţei tăietoare). Se obţine: L L ( x,) ( x,) N( x,) N ( x,) ds + ds L 0 H (4.37) EI H AE H o unde L este ungimea desfăşurată a arcuui care se poate considera egaă cu (deschiderea arcuui), iar ds dx cosα ds dx. Cu acestea reaţia (4.37) devine: 0 o E [ ( ) ] ( ) x H ( H dx + ) ( ) o I ( x) dx + H dx + 0 Se reovă ecuaţia în raport cu H şi se obţine: o o o E o HI A ( x) E dx dx H (4.38) I dx + A o
212 În reaţia (4.38) repreintă ordonata arcuui în dreptu secţiunii x, iar (x) este momentu încovoietor în secţiunea x pentru grinda dreaptă simpu reemată cu aceeaşi încarcare şi cu aceeaşi deschidere. Observaţii: Reaţia (4.38) poate fi foosită pentru cacuu reacţiunii pe oriontaă numai atunci când arcu paraboic este încărcat cu forţe verticae şi momente concentrate. Reaţia (4.38) nu poate fi foosită pentru cacuu reacţiunii pe oriontaă dacă pe arc sunt forţe oriontae ((x)0) şi în acest ca pentru ridicarea nedeterminării se fooseşte prima teoremă a ui Castigiano. Ţînând cont de ecuaţia generaă a unui arc paraboic dată de reaţia (4.3) integraa de a numitoru reaţiei (4.38) devine: o 6 f 4 dx o 6 f x 6 f 3 4 ( x) dx ( x x + x ) 5 6 f o 8f 30 5 dx (4.39) Observaţii: Vaoarea integraei din reaţia (4.39) se fooseşte în reaţia (4.38) pentru cacuu tuturor arceor paraboice încărcate cu forţe verticae şi momente concentrate. Se demonstreaă cu uşurinţă ca integraa din reaţia (4.39) este mare în comparaţie cu raportu I, ceea ce permite ca în cacue raportu A să fi fie negijat (se poate face o eroare de ce mut 3%). Integraa de a numărătoru reaţiei (4.38) se cacueaă pentru fiecare apicaţie în parte.
213 Apicaţii:. Să se determine eforturie pentru arcu paraboic, soicitat de o încărcare uniformă, din figura q H H V A x x V B q q/ q/ Figura Reovare: Se consideră grinda echivaentă (grinda dreaptă simpu reemată, soicitată de o sarcină uniform distribuită de intensitate q) şi se scrie momentu încovoietor în secţiunea x: ( x) q qx x (4.40) Ţînând cont de ecuaţia generaă a unui arc paraboic dată de reaţia (4.3) şi de expresia momentuui încovoietor se cacueaă integraa de a numărătoru reaţiei (4.38). Se obţine: o fq 4 fx qx ( x) dx ( x) ( x) dx x ( x) o fq 5 fq o dx (4.4) 3
214 Reacţiunea H pentru arcu soicitat de sarcina uniform distribuită (figura 4.49) se cacueaă cu reaţia (4.38), negijând termenu reaţiie (4.39) şi (4.4). Se obţine: 3 I A şi ţinând cont de fq q H 5 (4.4) 8f 8 f 5 omentu încovoietor într-o secţiune a arcuui se cacueaă cu reaţia (4.34) în care (x) este dat de reaţia (4.40), de reaţia (4.3), iar H de reaţia (4.4). Prin urmare: q qx ( x,) ( x) H x ( x) q qx x q qx x 0 q 8 f 4 fx (4.43) Reaţia (4.43) indică faptu că arcu paraboic, dubu articuat, soicitat de o sarcină uniform distribuită nu este soicitat a încovoiere. Ţinând cont de reaţia (4.36) arcu este supus numai a compresiune, forţa axiaă fiind constantă pe toată ungimea arcuui şi egaă cu reacţiunea H (forţa de împingere pe oriontaă). Prin urmare pentru o astfe de construcţie nu este necesară o secţiune transversaă cu un moment de inerţie mare.. Să se determine eforturie pentru arcu paraboic, soicitat de o forţă concentrată, din figura Reovare: Se consideră grinda echivaentă (grinda dreaptă simpu reemată, soicitată de o forţă concentrată P a mijocu deschiderii grinii) şi se scrie momentu încovoietor în cee două secţiuni: 4
215 Figura ( ) ( ) x P x P x x P x ' ' ' (4.44) Ţinând cont de ecuaţia generaă a unui arc paraboic dată de reaţia (4.3) şi de expresia momentuui încovoietor se cacueaă integraa de a numărătoru reaţiei (4.38). Se obţine: ( ) ( ) ( ) ( ) ( ) 48 5Pf Pf Pf dx x x x Pf dx x x Pf dx x 4 fx x P x P dx x 4 fx x P dx x ' 3 ' ' ' o 3 ' ' ' ' ' o o (4.45) / x x' P/ H H P / P x P/ x' 5
216 Reacţiunea H pentru arcu soicitat de o forţă concentrată (figura 4.50) se cacueaă cu reaţia (4.38), negijând termenu (4.39) şi (4.45). Se obţine: I A şi ţinând cont de reaţiie 5Pf H 48 5P 8f 8 f (4.46) 5 În prima regiune a arcuui momentu încovoietor se cacueaă cu reaţia (4.34) în care (x) este dat de reaţia (4.44), de reaţia (4.3), iar H de reaţia (4.46). Prin urmare: ( x, ) ( x) H x ( x) P P 5P 5P x x x P 8 f 5 Px 3 4 fx 9 3 Px (4.47) Reaţia (4.47) arată că momentu încovoietor variaă pe ungimea arcuui paraboic după o paraboă. Se studiaă variaţia momentuui: ( 0) ' 0 ( x, ) P 4 Px P P 0 7P ,054P Px P x 0,8 '' 5 P 9 5 P ( x,) > 0 min P P ,05P Pe cea de a doua regiune diagrama de moment încovoietor se poate trasa prin simetrie (figura 4.5) P 3 6 5P Ţinând cont de reaţia (4.36) forţa axiaă pentru arcu paraboic este constantă pe toată ungimea arcuui şi egaă cu reacţiunea H, arcu fiind supus a compresiune: N ( x, ) H 5P 8 f
217 0,054P 0,05P 0,8 0,5 Figura 4.5. Observaţie: Se ştie din prima parte a cursuui de Reistenţa materiaeor că pentru grinda dreaptă simpu reemată soicitată de o forţă concentrată momentu încovoietor maxim este decât pentru arcu paraboic. P 0,5P 4, deci de cinci ori mai mare De reţinut: Pentru cacuu arceor paraboice încărcate cu sarcini verticae şi momente concentrate se parcurg următoaree etape: Se consideră grinda dreaptă echivaentă (o grindă dreaptă simpu reemată cu aceeaşi încărcare şi deschidere ca şi arcu). Se scrie momentu încovoietor (x) în secţiunea x pe grinda echivaentă. Se cacueaă integraa: o ( x) dx unde este ordonata arcuui în secţiunea x care este dată de reaţia: 4 fx ( x) Se cacueaă vaoarea forţei de împingere pe oriontaă (reacţiunea H) cu reaţia: 7
218 unde: termenu I A H o o se negijeaă ( x) dx I dx + A integraa 8f dx şi are întotdeauna această vaoare 5 o parte. integraa o ( x) dx se cacueaă pentru fiecare apicaţie în Se scrie expresia momentuui încovoietor pentru arcu paraboic cu reaţia: ( x,) ( x) H Se studiaa variaţia momentuui încovoietor şi se repreintă diagrama. Se scrie expresia forţei axiae, se studiaă variaţia acesteia şi se traseaă diagrama. Se stabieşte secţiunea pericuoasă în care se efectueaă cacuu de reistenţă (verificare sau dimensionarea) foosînd reaţia ui Navier generaiată: Observaţie: N + A W Dacă pe arc sunt forţe oriontae ((x)0) pentru ridicarea nedeterminării se fooseşte prima teoremă a ui Castigiano. i Pentru a evita incovenientu împingerii aterae se fooseşte arcu cu coardă (figura 4.5). Se noteaă cu A secţiunea corii şi E moduu de easticitate a corii. 8
219 H A, E H Figura 4.5. În acest ca în coardă apare o forţă oriontaă H, o forţă de întindere care menţine arcu (aceasta nu este reacţiunea din reaem) care se cacueaă cu reaţia: În această reaţie raportu H I A o ( x) dx I I dx + + A A o E E E nu poate fi negijat. E Probeme propuse: Să se trasee diagramee, N pentru arcee paraboice din figurie 4.53 şi q q q² f Figura q f q / / Figura
220 CAPITOLUL 5 SOLICITĂRI DINAICE PRIN ŞOC 5.. Generaităţi Până în preent au fost studiate stărie de soicitare ae corpurior soide deformabie produse de acţiunea unor sarcini exterioare care au fost apicate în mod static, adică cu intensitate crescândă, încet şi uniform, de a ero a vaoarea or maximă, astfe încât acceeraţiie diferiteor particue ae corpuui să fie negijabie. Sub acţiunea acestora corpurie soide se deformeaă, dar nu se pun în mişcare şi nici nu îşi modifică vitea. În practică există şi situaţii în care mişcarea determină starea de soicitare a corpuui soid. Existenţa acceeraţiei produce forţe, prin care corpu soid devine soicitat. Soicitărie produse astfe se numesc soicitări dinamice. Este cau când o sarcină este aşeată brusc pe o grindă sau cade de a o anumită înăţime pe ea. Asemănător este cau când o bară în mişcare oveşte un corp rigid imobiiat. Soicitărie dinamice prin şoc, produse în specia prin ciocniri, sunt produse prin variaţia bruscă a accearaţiei. 0
221 Funcţionarea majorităţii maşinior, în specia a aceora care execută mişcări rectiinii aternative, este însoţită de şocuri. În unee cauri şocurie sunt provocate ca urmare a existenţei unor jocuri prea mari în îmbinărie pieseor, iar în ate cauri şocurie apar chiar a funcţionarea normaă a maşinii. Comportarea a şoc a corpurior soide diferă substanţia de modu de comportare a soicitarea statică. S-a constatat că micşorări ocae ae ariei secţiunii transversae pot provoca în corpuri creşteri foarte mari ae tensiunior. Baree cu crestături, de exempu, se comportă defavorabi a acţiunea şocuui, iar epruvetee foosite pentru încercarea materiaeor a reiienţă, sunt prevaute cu crestături, pentru a impune astfe secţiunea de rupere. 5.. Cacuu a soicitări dinamice prin şoc Pentru cacuu a soicitări dinamice prin şoc este necesar, pe de o parte, să se determine tensiunie şi deformaţiie care se produc în piesee care se ciocnesc, iar pe de ată parte, să se stabiească în ce măsură aceste tensiuni şi deformaţii sunt pericuoase pentru materia. Cacuu sistemeor eastice a soicitări prin şoc, examinate ca sisteme cu un singur grad de ibertate, permit să se determine ordinu de mărime a depasărior, precum şi a tensiunior şi deformaţiior în timpu şocuui. Teoria şocuui eastic poate fi foosită numai în cau în care tensiunie din timpu şocuui nu depăşesc imita de proporţionaitate. odu genera de reovare a acestor probeme constă în a găsi o sarcină fictivă, care, acţionând static, să producă aceeaşi tensiuni în corp ca şi sarcina reaă, care acţioneaă dinamic (prin şoc). Se studiaă, în cee ce urmeaă, un corp soid eastic care poate fi materiaiat, de exempu, printr-un arc eicoida asupra căruia cade o greutate G de a o înăţime h (figura 5..) şi care se deformeaă în ocu ovit cu o săgeată f d. Şocu se produce în feu următor: după ce greutatea atinge arcu, ea continuă să
222 se mişte, comprimându-, iar forţa eastică a arcuui micşoreaă treptat vitea sa. După căderea de a înăţimea h greutatea posedă o energie cinetică egaă cu ucru mecanic efectuat (ucru mecanic exterior). În momentu în care greutatea se opreşte, tot ucru mecanic exterior executat de aceasta s-a transformat în energie potenţiaă de deformaţie (ucru mecanic interor) a arcuui, iar forţa de interacţiune dintre greutate şi arc atinge vaoarea maximă. Lucru mecanic exterior executat de greutate este dat de reaţia: ( h ) L G + (5..) ext f d În virturea egii conservării energiei se admite că în momentu ciocnirii energia cinetică a greutăţii oprite se transformă în întregime în energie potenţiaă de deformaţie, iar aceasta din urmă determină vaorie forţeor şi a depasărior. Prin urmare se poate scrie: G h G d fd Figura 5.. L ext L int (5..) În prima parte a cursuui de Reistenţa materiaeor au fost stabiite reaţii de cacu pentru ucru mecanic interior, a toate tipurie de soicitări, pentru situaţia în care sarcina este apicată static. Din acest motiv se transferă soicitarea dinamică în una statică, aşa cum este indicat în figura 5..: se încarcă corpu soid eastic cu o greutate G d > G astfe încât să se obţină aceeaşi săgeată f d.
223 G d fd Figura 5.. Pentru soicitarea statică considerată ucru mecanic interior este: Ţinând cont de reaţiie (5.) şi (5.3), reaţia (5.) devine: G d L int f d Gd fd (5.3.) ( h + fd G ) (5.4.) Se face ipotea că egea ui Hooke rămâne vaabiă şi în cau soicitării dinamice şi prin urmare se poate scrie: G k f G d st k f unde: f st săgeata arcuui atunci când greutatea este apicată static. Ţinând cont de utimie egaităţi reaţia (5.4.) devine: sau efectuând cacuee: k f d kf st d ( h + f ) fd fst f fst h 0 Se obţine o ecuaţie de gradu a doiea a cărei souţie este f d : d d (5.5.) sau d st st f f ± f + hf st 3
224 f d f st ± Se aege singura souţie verosimiă, anume cea poitivă (ţinând cont de faptu că radicau repreintă o cantitate poitivă supraunitară, se păstreaă în reaţie doar semnu pus) şi se obţine: + h f st Se noteaă: h f d fst + + (5.6) fst h Ψ + + (5.7) ψ se numeşte coeficient (mutipicator) de şoc sau de impact. f st Observaţii: Reaţia (5.7) este vaabiă numai pentru corpu care este ovit de greutatea G (reaţia nu se poate apica corpuui care oveşte). Coeficientu (mutipicatoru) de şoc sau de impact repreintă raportu dintre mărimie soicitării dinamice şi cee ae soicitării statice corespunătoare. Pentru h0 se obţine vaoarea minimă a mutipicatoruui de şoc ψ. Cu această notaţie reaţia (5.6) devine: f Ψ (5.8) d f st Deoarece s-a presupus că rămâne vaabiă egea ui Hooke înseamnă că reaţia care există între deformaţii, reaţia (5.8), trebuie să existe şi între tensiuni, deci se poate scrie: respectiv: τ Ψ (5.9) d st Ψ (5.0) d τ st 4
225 Observaţie: Utimie trei reaţii arată faptu că reovarea probemeor de şoc se reduce practic a cacuu mărimior statice de soicitare şi a mutipicatoruui de impact. Pentru ca reaţia (5.7) să aibă vaabiitate generaă se va exprima în funcţie de ucru mecanic. Reută: h G h G Lext Ψ (5.) fst G fst G Lint În unee situaţii este posibi ca greutatea să se depasee cu o anumită viteă v pe o ată direcţie decât cea verticaă. În acest ca se determină o înăţime echivaentă făcând ape a egea căderii corpurior. Se ştie că: v gh v Se înocuieşte în reaţia (5.7) şi se obţine: gh h v g st v g v Ψ (5.) f g f Reaţiie (5.8)-(5.0) împreună cu reaţiie (5.7), (5.) şi (5.) permit reovarea probemeor de şoc. st Observaţii: Din reaţiie stabiite anterior reiese că un corp soid reistă cu atât mai bine a şoc cu cât e este mai deformabi. La deducerea reaţiior s-a admis faptu că forţa este apicată deodată cu toata intensitatea. În reaitate dacă acest ucru s-ar întâmpa L ext nu ar avea timp să fie înmagainat în interioru corpuui şi atunci distrugerea corpuui ovit se va produce oca. Pentru ca L ext să poată 5
226 fi înmagainat trebuie să treacă o anumită perioadă de timp astfe încât deformaţiie să se poată depasa în interioru corpuui. Experienţee arată că vitea de depasare a deformaţiior în corpuri sunt proporţionae cu vitea de depasare a sunetuui în ace corp. Prin urmare formuee deduse sunt vaabie până a o viteă de ovire egaă cu vitea de depasare a sunetuui în corp. Reaţiie deduse pentru cacuu a soicitări dinamice prin şoc au fost staiite pe baa următoareor ipotee:. deformaţia dinamică are oc numai în domeniu eastic;. întreaga energie potenţiaă a forţei care oveşte corpu se transformă în energie eastică de deformaţie a acestuia (aceasta presupune că se negijeaă inerţia corpuui ovit, deformarea reaemeor şi ate pirderi de energie); 3. se negijeaă deformarea pastică; 4. vitea de ovire este mai mică decât vitea de propagare a deformaţiior în corpu ovit. De reţinut: Pentru cacuu coeficientuui (mutipicatoruui) de şoc sau de impact se foosesc următoaree reaţii: Ψ + + Ψ L + + L h f st ext int Ψ + + v g f st Se admit în cacu următoaree aproximaţii ae reaţiior anterioare: - pentru h 0 fst 6
227 - pentru h 00 fst Ψ + Ψ + Ψ + Ψ Ψ Ψ L L h f L L h f st ext int v g f st ext int v g f st st (5.3) (5.4) Reovarea probemeor de şoc se reduce practic a reovarea unor probeme corespunătoare de soicitare statică, prin introducerea coeficientuui (mutipicatoruui) de şoc sau de impact, cu ajutoru următoareor reaţii: τ f Ψ d st Ψ d τ st Ψ d f st etoda de cacu are un caracter genera, fiind apicabiă a toate soicitărie simpe şi compuse (în domeniu deformaţiior iniar-eastice). Apicaţii:. Să se dimensionee bara de secţiune circuară cu ungimea 0 3 mm, asupra căreia cade o greutate G kn de a o înăţime h 00mm (figura 5.3). Se cunosc: E, 0 5 Pa, a 00Pa. Se negijeaă fambaju. 7
228 G h Figura 5.3. Reovare: Soicitarea statică din bară este de compresiune (figura 5.4.). G f st Figura 5.4. Din prima parte a cursuui de Reistenţa materiaeor se ştie că: N f st AE N A st Ţinând cont de reaţiie (5.7), (5.9) coeficientu (mutipicatoru) de şoc sau de impact şi tensiunea dinamică devin: G A G AE Ψ + + h f st + + AEh G 8
229 d Ψ st + AEh G + G A Pentru a dimensiona bara se impune condiţia cunoscută: d a Se înocuieşte tensiunea dinamică din reaţia anterioară şi se obţine: AEh G + + a G A Se înocuiesc vaorie numerice şi reută: πd d 4 0 πd, πd 3 00 Se negijeaă din faţa radicauui, de sub radica, se efectueaă cacuee şi se obţine: d π π 73mm. Să se determine înăţimea maximă de cădere ( h max? ) ştiind vaoarea greutăţii G 00N (figura 5.5). G h Figura 5.5. Grinda are secţiunea pătrată cu atura a 00mm şi ungimea 500 mm. Se cunosc: E, 0 5 Pa, a 50Pa. 9
230 Reovare: Soicitarea statică din grindă este preentată în figura 5.6. Grinda este soicitată a încovoiere. Coeficientu (mutipicatoru) de şoc este dat de reaţia: Ψ h f st unde săgeata statică se determină cu prima teoremă a ui Castigiano. Prin urmare: f st U G E I 0 ( x) G ( x) dx G f st max F x x Figura 5.6. omentu încovoietor în secţtiune este: ( x) Gx şi înocuind în reaţia precedentă se obţine: 0 ( x) G f st ( x) dx ( Gx)( x) dx E I G E I 3EI 0 Se înocuieşte în expresia coeficientuui de şoc şi se obţine: Ψ Tensiunea dinamică este dată de reaţia: h h 3EI f 3 G st 3 30
231 d max Ψ st max Tensiunea statică se determină cu reaţia ui Navier: de unde: st max d max W max 6h EI G G 6G 3 3 a a 6 3 6G 3 a Pentru a determina înăţimea maximă de cădere se impune condiţia: d max Înocuind tensiunea dinamică din reaţia precedentă se obţine: 6h EI G 3 a 6G 3 a a După efectuarea simpificărior, înocuirea vaorior numerice şi efectuarea cacueor se obţine: de unde h max 30mm. 6h, O grindă din oţe cade de a o înăţime h pe două reaeme simpe situate a o distanţă 500 mm (figura 5.7.). Să se determine înăţimea maximă de cădere dacă grinda are secţiunea pătrată cu atura a 00mm. Se cunosc: E, 0 5 Pa, a 50Pa, γ OL 7,8 0-5 N/mm 3. h 3
232 Figura 5.7. Reovare: Soicitarea statică din grindă este preentată în figura 5.8. x qg/ q/ q/ max q²/8 Figura 5.8. Grinda este soicitată a încovoiere de o sarcină uniform distribuită cu intensitatea: G γ V γ A q γ A Coeficientu (mutipicatoru) de şoc se cacueaă cu reaţia: unde: de reaţia: L L ext int Ψ EI L L ext int G h qh U 0 ( x)dx Pentru grinda din figura 5.8. momentu încovoietor în secţiunea x este dat q qx q ( x) x ( x x ) 3
233 Înocuind în reaţia precedentă se obţine: L int q q EI EI 4 4EI ( x) dx ( x x ) dx ( x + x x ) dx 0 Efectuând toate cacuee reută: 5 q L int 0Ea Prin urmare coeficientu (mutipicatoru) de şoc devine: 4 0 Ψ L L ext int 0Ea q 4 4 h Tensiunea dinamică este dată de reaţia: d max Ψ st max Tensiunea statică se determină cu reaţia ui Navier: st max W max q 8 a 6 3 3q 4a 3 de unde: d max 0h Ea q 4 4 3q 4a Pentru a determina înăţimea maximă de cădere se impune condiţia: d max Înocuind tensiunea dinamică din reaţia precedentă, după efectuarea simpificărior, înocuirea vaorior numerice şi efectuarea cacueor se obţine: a 3 3 3,9 h, 0 7,8 50 de unde h max 54,94mm. 33
234 4. O bară prismatică cade de a o înăţime h ca în figura 5.9. Să se determine înăţimea maximă de cădere dacă se cunosc: E, a, γ. γ, E, a h Figura 5.9. Reovare: Soicitarea statică din grindă este preentată în figura 5.0. Grinda este soicitată a compresiune de o sarcină uniform distribuită cu intensitatea: G γ V γ A q γ A q x x x q N st Figura 5.0. Coeficientu (mutipicatoru) de şoc se cacueaă cu reaţia: unde: Ψ L L ext int 34
235 L L ext int G h qh U EA 0 N ( x)dx Pentru bara din figura 5.0. forţa axiaă în secţiunea x este dată de reaţia: N ( x) qx Se înocuieşte în expresia ucruui mecanic interior şi se obţine: L q int N ( x) dx ( qx) dx x dx EA EA EA Prin urmare coeficientu (mutipicatoru) de şoc devine: 3 q 6 EA Lext qh 6EA 6EAh Ψ L 3 q Aγ int 6Eh γ Tensiunea dinamică este dată de reaţia: Ψ d max st max Tensiunea statică se determină cu reaţia: st ( x) iar tensiunea statică maximă este: de unde: d max ( x) N qx Aγx γ x A A A 6hE γ γ st max st ( ) γ Pentru a determina înăţimea maximă de cădere se impune condiţia: d max a Înocuind tensiunea dinamică din reaţia precedentă, după efectuarea simpificărior, înocuirea vaorior numerice şi efectuarea cacueor se obţine: γ 6hE γ a 6 Ehγ a de unde: h a 6Eγ 35
236 Observaţii: Deoarece tensiunea statică nu depinde de arie în cau acestei apicaţii nu se poate face un cacu de dimensionare; Indiferent de secţiunea A a barei prismatice înăţimea maximă de cădere se cacueaă cu reaţia stabiită anterior. Probeme propuse:. O greutate G 0kN cade de a înăţimea h 00mm pe mijocu unei grini de deschidere 3,m (figura 5.). Se cere să se cacuee tensiunea dinamică maximă şi săgeata dinamică maximă în momentu impactuui. Se cunosc: grinda are secţiunea patrată 50mm x 50mm, E, 0 5 Pa. h G / / Figura 5... Să se determine înăţimea maximă de cădere ştiind că G 0,kN. Grinda din figura 5.. are secţiunea pătrată cu atura a 40mm. Se cunosc: 500 mm, E, 0 5 Pa, a 40Pa. G h 3 Figura
237 3. Să se compare tensiunie care apar în baree din figura 5.3, atunci când sunt ovite de o aceeaşi greutate G care cade de a aceeaşi înăţime h. Bara din figura 5.3a are secţiunea transversaă A, cea din figura 5.3c are secţiunea A, iar cea din figura 5.3b are pe porţiunea strujită (de ungime ) secţiunea A şi pe rest secţiunea A (A >A ). Figura Să se compare două grini, încastrate a o extremitate şi ibere a ceaată, de aceeaşi deschidere, una de secţiune constantă dreptunghiuară (figura 5.4a) şi ceaată (figura 5.4b) de secţiune variabiă (grinda de egaă reistenţă a încovoiere) din punct de vedere a comportării or a acţiunea dinamică a unei greutăţi G, care cade de a înăţimea h şi e oveşte în extremitatea iberă. G h a) b) c) G h a) b) Figura O grindă articuată, de greutate G, cu secţiunea constantă şi ungimea, cade din poiţia verticaă asupra unui reaem rigid (figura 5.5). Se cere să se afe expresia tensiunii maxime, ştiind că grinda are secţiunea pătrată cu atura a. 37
238 G A B Figura O greutate G,kN cade de a o înăţime h 00mm pe grinda din figura 5.6, care este reemată eastic a un capăt pe un arc cu n 9 spire, cu raa de înfăşurare R 36mm şi diametru sârmei d 8mm. G h Figura 5.6. Se cere să se determine tensiunea normaă maximă din grindă şi tensiunea tangenţiaă maximă din arc în momentu şocuui. Se cunosc: 400mm, E, 0 5 Pa şi G arc 8,3 0 4 Pa. Grinda are secţiunea dreptunghiuară cu înăţimea de 30mm şi ăţimea de 90mm. 7. O greutate G00N cade de a înăţimea h80mm pe un ine subţire de raă medie R50mm şi diametru secţiunii d 30mm (figura 5.7). Să se cacuee tensiunea dinamică maximă din ine. Se cunoaşte E, 0 5 Pa. 38
239 G h R Figura Grindă cotită de oţe (E, 0 5 Pa) din figura 5.8 are secţiunea transversaă pătrată 60mm x 60mm. O greutate G cade pe capătu iber a barei cotite de a înăţimea h 30mm. Se cere să se cacuee tensiunea maximă în momentu şocuui şi săgeata maximă în momentu şocuui ( 500mm). Se consideră EI const. pentru ambee bare ae grinii cotite. G h Figura
240 CAPITOLUL 6 VASE CU PEREŢ I SUBŢIRI 6.. Generaităţi Vasee cu pereţi subţiri constituie o categorie de corpuri utiiate pentru transportu sau depoitarea fuideor. În cau în care presiunea interioară este reativ mică, grosimea pereteuui este mut mai mică decât raa medie a vasuui şi de aceea un astfe de vas se studiaă considerând numai suprafaţa sa mediană şi negijându-se variaţia tensiunior pe grosimea pereteui. În acest capito se studiaă vasee reaiate sub forma particuară de corpuri de revouţie, obtinuţe prin mişcarea unei curbe în juru unui ax. Peretee vasuui având grosimea foarte mică în raport cu restu dimensiunior se va considera că nu poate transmite momente încovoietoare şi deci nici forţe tăietoare, în acest ca soicitarea fiind cea de întindere. Vasee cu pereţi subţiri se cacueaă după teoria membranei adică peretee vasuui se comportă ca o membrană sub care s-a introdus ichidu sub presiune. 40
241 Într-un punct a unei suprafeţe se poate duce o normaă unică şi o infinitate de pane care să conţină această normaă. Fiecare pan intersecteaă suprafaţa după o curbă care are în punctu respectiv o anumită raă de curbură. Pentru a obţine cee două curbe particuare care au raee de curbură maximă şi minimă intersecţia se face cu panee principae definite astfe: panu meridian: panu care conţine axa de revouţie şi punctu respectiv; panu parae: panu perpendicuar pe panu meridian şi care conţine normaa în punct a suprafaţă. 6.. Ecuaţia ui Lapace Pentru a studia starea de tensiune într-un punct din peretee vasuui se ioeaă un eement de voum care conţine punctu respectiv. Ioarea acestui eement de voum se face intersectând suprafaţa cu două pane meridiane şi două pane paraee infinit apropiate (figura 6.). curbă meridiană curbă paraeă Figura 6.. Pe cee patru feţe secţionate apar tensiunie principae, (figura 6.). Eementu de voum se afă intr-o stare pană de tensiune. Raee care descriu în ungimea reaă ds şi ds şi rămân în aceaşi timp pependicuare pe suprafaţă se numesc rae principae şi se noteaă cu ρ, ρ. 4
242 Observaţii: ρ este raa de curbură a curbei meridiane (curba care se obţine tăind suprafaţa printr-un pan care conţine axa de rotaţie); ρ este raa de curbură care se găseşte pe normaa dusă din punctu de a suprafaţă până ce intersecteaă axa de rotaţie; tensiunea normaă pe direcţia meridianuui; tensiunea normaă pe direcţia paraeuui. Se fac următoaree notaţii: h grosimea pereteui; O, O centree de curbură. 0 dφ 0 ρ dφ ds h ρ ds Figura 6.. 4
243 Se consideră că în interioru vasuui există o presiune p. Se scrie echiibru eementuui repreentat în figura 6.. sub forma unei ecuaţii de proiecţii de forţe pe direcţia normaă. Se obţine: Ţinând cont că: dϕ dϕ p ds ds ds h sin ds h sin 0 (6.) ds ds ρ dϕ ρ dϕ şi că eementu având dimensiuni infinit mici: dϕ sin dϕ sin se fac înocuirie în reaţia (6.) şi reută: dϕ dϕ dϕ dϕ ρ dϕ ρ dϕ ρ dϕ h ρ dϕ h 0 (6.) p Împărţind reaţia (6.) prin h, ρ, ρ, dφ, dφ se obţine: ρ + ρ p h (6.3) unde: - tensiunea normaă pe direcţia meridianuui (este tensiunea tangentă a curba generatoare); - tensiunea normaă pe direcţia paraeuui (este tensiunea tangentă a panu parae care este pusă în evidenţă făcând o secţiune ongitudinaă în vas); h grosimea pereteui; p presiunea; ρ - raa de curbură a curbei meridianuui; ρ - raa de curbură a curbei paraeuui. Reaţia (6.3) este cunoscută în iteratura de speciaitate sub denumirea de ecuaţia ui Lapace. 43
244 Observaţii: Ecuaţia ui Lapace se găseşte în iteratura de speciaitate şi sub forma: ρ m m + ρ Vasee cu pereţi subţiri au profiu determinat de o curbă meridiană, iar secţiunie transversae pe axa ongitudinaă sunt cercuri. Reaţia stabiită se poate apica în următoaree ipotee: p p. grosimea vaseor este mică în raport cu raee principae de curbură şi ca urmare tensiunie sunt constante pe grosime;. nu există saturi bruşte de grosime a pereteui; 3. soicitarea nu se face prin forţe sau cupuri concentrate. p h În cau unui vas cu geometrie cunoscută stabiirea stării de tensiune întrun punct necesită determinarea raeor de curbură principae ρ, ρ şi scrierea ecuaţiei ui Lapace. Această singură ecuaţie nu permite determinarea ceor două necunoscute: tensiunie principae,. Este necesar să se scrie o a doua ecuaţie care se obţine ioând o porţiune finită din vas, pentru care se exprimă echiibru, scriind proiecţia de forţe pe direcţia axei de revouţie a vasuui. Cacuu de reistenţă a vasuui (verificarea sau dimensionarea vasuui) se face pe baa uneia din teoriie de reistenţă, impunând condiţia cunoscută: echiv a (6.4) unde tensiunea echivaentă se cacueaă cu una din reaţiie: - teoria tensiunii normae maxime: unde max{ } max, - teoria tensiunii tangenţiae maxime: echiv max (6.5) echiv (6.6) - teoria energiei de deformaţie modificatoare de formă: 44
245 echiv + (6.7) 6.3. Vase cu pereţi subţiri care conţin ga Pentru această categorie de vase presiunea este constantă. Apicaţie: Să se dimensionee vasu din figura 6.3. Se cunosc: p 0,6N/mm, Rm, a 0Pa. h R p Figura 6.3. Reovare: Se studiaă separat fiecare vas. Pentru vasu semisferic raee de curbură sunt ρ ρ R. Înocuind în reaţia (6.3) se obtine: ρ p + h R R + ρ Din motive de simetrie a formei şi a încărcării avem şi înocuind în reaţia precedentă se obţine: p R (6.8) h Pentru dimensionare, ţinând cont de reaţiie (6.4) şi (6.5), se impune condiţia ca tensiunea din peretee vasuui să fie egaă cu tensiunea admisibiă şi se obţine: p R a h h p R a p h 45
246 Se înocuiesc vaorie numerice şi reută: 0,6 0 h 0 3 5mm Pentru vasu ciindric raee de curbură sunt ρ 0, ρ R. ρ Înocuind în reaţia (6.3) se obţine: p p + ρ ρ h R h p R h (6.9) Este necesar să se scrie o a doua ecuaţie pentru a determina şi tensiunea. Pentru aceasta se secţioneaă vasu (perpendicuar pe axa de revouţie) şi se ioeaă o porţiune finită din vas. Se scrie echiibru pentru porţiunea de vas considerată sub forma unei ecuaţii de proiecţii de forţe pe direcţia axei de revouţie a vasuui. Se obţine: p R πr h p πr 0 (6.0) h Din reaţiie (6.9) şi (6.0) reută pentru vasu ciindric p R max (6.) h Pentru dimensionare, ţinând cont de reaţiie (6.4) şi (6.5), se impune condiţia ca tensiunea din peretee vasuui să fie egaă cu tensiunea admisibiă şi se obţine: p R p R a h 0mm h Din reaţiie (6.8) si (6.) se observă că în cau vasuui sferic tensiunea este de două ori mai mică decât tensiunea maximă din vasu ciindric. a Observaţii: Din punctu de vedere a consumuui de materia vasu sferic este indicat în comparaţie cu vasu ciindric. De aceea pentru presiuni mari şi foarte 46
247 mari şi pentru materiae costisitoare (oţe inoxidabi) se fooseşte vasu sferic cu toare că reaiarea acestuia este mut mai compicată. La proiectarea unui vas cu pereţii subţiri trebuie ţinut cont de efectu reemării şi de faptu că a trecerea de a o formă de vas a ata apare o diferenţă între tensiuni şi de aceea onee de trecere trebuie întărite (de obicei cu un ine). Dacă pe o suprafaţă acţioneaă o presiune constantă, atunci, independent de forma suprafeţei, proiecţia pe o direcţie dată a reutantei forţeor de presiune este egaă cu produsu dintre presiunea p şi aria proiecţiei suprafeţei pe un pan norma pe direcţia dată Vase cu pereţi subţiri care conţin ichid Pentru această categorie de vase axa de revouţie este verticaă, iar presiunea nu mai este constantă ci variaă cu adancimea H dupa o reaţie de forma: p ρ g H γ H (6.) Apicatie: Să se trasee diagramee de variaţie a tensiunior pentru vasu conic, pin cu ichid avâd greutatea specifică γ (figura 6.4). Reovare: Se studiaă starea de tensiuni într-un punct A afat a distanţa faţă de vârfu conuui. În acest punct avem: p γ ( H ) ρ ρ ρ AB 0 (6.3) 47
248 Observaţie: ρ se măsoară pe direcţia normaei între punctu considerat, în cau considerat A şi axa de revouţie. h H α B A α Figura 6.4. Cu notaţiie din figura 6.4. se poate scrie: r tgα ρ AB (6.4) cosα cosα Ţinând cont de reaţiie (6.3) şi (6.4) ecuaţia ui Lapace devine: ( H ) p γ + ρ ρ h tgα h cosα tgα γ ( H ) cosα h Se studiaă variaţia tensiunii pe înăţimea vasuui, pentru [ 0; H ]. Se obţine: ' ' ( 0) ( H ) ' const. < 0 max 0 ( H ) 0 [ 0,H ] max γ tgα H h cosα 4 H ' H γ tgα H h cosα Diagrama de variaţie a tensiunii este preentată în figura din figura 6.5. H 48
249 γ tgα H h cosα 6 γ tgα H h cosα 4 γ tgα 3H h cos α 6 H/ 3H/4 Figura 6.5. A doua ecuaţie se obţine scriind ecuaţia de proiecţii de forţe pe direcţia axei de revouţie (pe direcţie verticaă) a tuturor forţeor care acţioneaă asupra părţii din vas care se afă sub secţiunea (figura 6.6). Se obţine: h πr cosα γ V πr h πr cosα γ 3 γ r h cosα 3 γ r 3 h cosα ( ) γ ( H ) ( 3H ) ( + 3H 3) ( 3H ) γ r ( 3H ) 6h cosα πr 0 r Ţinând cont că tgα r tgα se înocuieşte în utima reaţie şi reută: γ tgα ( 3H ) 6h cosα Se studiaă variaţia tensiunii pe înăţimea vasuui, pentru [ 0; H ]. Se obţine: 49
250 r H α V() Figura 6.6. ' '' ( 0) 0; ( H ) const. < 0 max ' ( 3H 4 ) 0 [ 0,H ] max 3γ H tgα 6 h cosα γ tgα γ H tgα H H 6h cosα 6h cosα 3H 4 3H γ tgα 3H 3H 4 6h cosα 4 Diagrama de variaţie a tensiunii este preentată în figura H Observaţii: În cau vaseor cu pereţi subţiri diagramee de variaţie a ceor două tensiuni se pot repreenta şi pe circumferinţa vasuui. Dacă pe o suprafaţă oarecare acţioneaă presiunea unui ichid, care are un nive iber, atunci componenta verticaă a reutantei forţeor de presiune este egaă cu greutatea ichiduui din voumu situat deasupra suprafeţei. Probeme propuse:. Să se dimensionee un vas ciindric cu raa R m pentru o presiune de ga p N/mm ştiind că a 40Pa. 50
251 anterioară.. Să se dimensionee un vas sferic în condiţiie preentate în probema 3. Să se verifice reervoru ciindric suspendat, pin cu ichid având greutatea specifică γ 0-5 N/mm 3. Se cunosc: h 4mm, H 8m, R 3m, reistenţa admisibiă a tabei este a 00Pa. 4. Să se determine tensiunie din pereţii unui reervor ciindric suspendat, (figura 6.7.). Se dau: greutatea specifică a ichiduui γ N/mm 3, H 5,5m, h 6mm, R m. 5. Să se dimensionee reervoru conic suspendat, preentat în figura 6.8., ştiind că înăţimea sa este H 5m, unghiu a vârf α 90 o, greutatea specifică a ichiduui γ N/mm 3 şi reistenţa admisibiă a tabei a 00Pa. γ 3H/4 H R Figura 6.7. γ α H/3 H Figura
252 CAPITOLUL 7 CALCULUL DE REZISTENŢĂ LA OBOSEALĂ 7.. Generaităţi Piesee nu reistă a fe de bine a soicitări repetate, ca şi a soicitărie statice. Soicitărie variabie se obţin atunci când sarcina variaă în timp ca direcţie sau ca direcţie şi intensitate. Variaţia sarcinior în timp are o infuenţă hotărâtoare asupra reistenţei materiaeor soicitate. Practica a arătat apariţia ruperior premature a mute organe de maşini aparent bine dimensionate cu reaţiie casice ae Reistenţei materiaeor, dar soicitate variabi periodic în timp. Ruperie s-au produs a tensiuni mut mai mici decât tensiunea corespunătoare imitei de curgere sau imitei de rupere pentru soicitarea statică. Studierea mecanismuui ruperii în cau soicitărior variabie a arătat că ruperea începe cu formarea în ocu ce mai soicitat a unor microfisuri, care se devotă treptat şi săbesc din ce în ce mai mut piesa şi în cee din urmă pot duce a ruperea ei. Fenomenu de rupere sub acţiunea sarcinior variabie în timp s-a numit impropriu rupere a oboseaă, ca şi cum materiau ar fi obosit în soicitare, 5
253 datorită preuării şi cedării de foarte mute ori a energiei de deformaţie. Capacitatea materiauui de a se opune ruperii în cau unor tensiuni variabie în timp se numeşte reistenţă a oboseaă. ecanismu formării fisurior în cau soicitior variabie este foarte compicat. În unee cauri, ona în care apar fisurie este situată a suprafaţă, în atee în interioru materiauui piesei. Până în preent, rămâne necar dacă fisurie a oboseaă iau naştere ca reutat a compunerii tensiunior remanente din materia cu tensiunie datorate sarcinior exterioare, sau fisurie a oboseaă sunt reutatu măririi şi devotării microfisurior existente în materia înainte ca acesta să fie soicitat. În unee cauri fisurie apărute dintr-o cauă sau ata se măresc sau se înmuţesc până a rupere, ateori apare o stare de echiibru în care creşterea fisurior înceteaă. S-a observat că devotarea fisurior devine deosebit de intensă dacă tensiunie variaă nu numai ca mărime, ci şi ca semn (de exempu tracţiunea aterneaă cu compresiunea). Cercetărie experimentae au arătat că reistenţa a oboseaă depinde de formă şi dimensiuni, de procedeu de preucrare, de starea suprafeţei precum şi de aţi factori care trebuie să se refecte în metodee de cacu. Trebuie menţionat că majoritatea acestor factori, a efectuarea cacueor statice, adică a cacueor în cau tensiunior constante în timp, sunt apreciaţi ca secundari şi nu sunt uaţi în consideraţie. S-a putut observa că ruperea apare după un numar cu atât mai mic de variaţii ae soicitării, cu cât tensiunea maximă din secţiunea pericuoasă are o vaoare mai mare. Dacă însă tensiunie produse au vaori reativ mici, atunci ruperea a oboseaă nu se produce nici după un număr foarte mare de variaţii ae soicitării. În comparaţie cu ruperie produse prin soicitări statice, ruptura a oboseaă are un aspect specific cu două one: o onă ucioasă şi o onă grăunţoasă cu cristae ascuţite, reutate dintr-o rupere casantă, produsă brusc. 53
254 Ruperea a oboseaă se produce în ona tensiunior mari, unde anumiţi factori constructivi sau tehnoogici, cum ar fi concentratorii de tensiune, conduc a început a apariţia unei microfisuri, care prin variaţia soicitării se adânceşte. Contactu dintre suprafeţee reutate prin fisurare duce a apariţia onei ucioase în secţiunea de rupere. Prin propagarea fisurii secţiunea săbeşte, pentru ca a un moment dat ruperea să se produca în mod brusc şi să apară astfe ona grăunţoasă în secţiunea de rupere. Observarea macroscopică şi microscopică a unei secţiuni rupte prin efectu oboseii, indică preenţa unei amorse ocae (sau un început de amorsă a fisurii) provocată de o concentrare de tensiune datorită unei imperfecţiuni a materiei sau schimbării geometrice a piesei. Această amorsă este continuată de o onă în care ruptura pare să se aprofundee din ce în ce mai mut. În cee din urmă, o a treia onă indică faptu că o ruptură bruscă se produce atunci când secţiunea rămasă este prea mică pentru a reista soicitării. Se disting trei etape în timpu procesuui: - amorsarea fisurii; - propagarea fisurii; - ruptura finaa a materiauui. Observarea aspectuui rupturii permite de cee mai mute ori determinarea tipuui de soicitare care a provocat ruperea piesei. Pentru expicarea ruperior a oboseaă trebuie avut în vedere şi faptu că reaţiie de cacu stabiite se baeaă pe ipotea mediuui continuu şi pe ipotea iotropiei, ipotee care nu concordă cu reaitatea. ateriaee utiiate în construcţia de maşini conţin pori, incuiuni nemetaice, grupuri de cristee orientate în mod diferit, ceea ce constituie concentratori de tensiune, deosebit de pericuoşi în cau soicitărior variabie. Din caua neomogenităţii materiaeor distribuţia tensiunior din secţiunie transversae ae bareor diferă de cea care reută din reaţiie de cacu ae tensiunior deduse pentru materiau omogen şi iotrop. Distribuţia reaă a tensiunior preintă abateri, vârfuri de tensiune, faţă de 54
255 distruibuţia teoretică. Aceste vârfuri pot constitui caua microfisurior care conduc a ruperea a oboseaă. 7.. Casificarea soicitărior variabie În majoritatea caurior în dreptu unui punct dintr-un organ de maşină tensiunea preintă o variaţie periodică între aceeaşi vaori: maxime max (sau τ max ) şi minime min (respective τ min ). Variaţia tensiunior pe durata unei perioade formeaă un cicu de tensiune. Pe baa notaţiie din figura 7.. se definesc următoaree eemente caracteristice ae cicuui sunt: Figura 7.. variaţia tensiunii: max min a v tensiunea maximă: max m + a tensiunea minimă: min m a tensiunea medie: m ( max + min ) ampitudinea tensiunior: a ( max min ) coeficientu de asimetrie a cicuui: R min. max 55
256 Observaţie: Ampitudinea tensiunii este notată cu a sau v, respective τ a sau τ v. ărimea coeficientu de asimetrie a cicuui defineşte natura unui cicu de tensiune. Cicurie cu aceaşi coeficient de asimetrie se numesc cicuri asemenea. În dependenţă de vaoarea coeficientuui de asimetrie se disting următoaree tipuri de soicitări, preentate în Tabeu 7.. Dacă tensiunie maxime şi minime sunt egae în mărime însă de semne contrarii, atunci cicu se numeşte simetric (poiţia 5 în Tabeu 7.), în ca contrar asimetric. Se impun următoaree preciări: pentru soicitarea statică (constantă) tensiunea îşi păstreaă vaoarea constantă, soicitarea fiind considerată un ca particuar a tensiunior variabie în timp cu ampitudine nuă; pentru soicitarea osciantă tensiunea în timpu soicitării îşi păstreaă semnu; pentru soicitarea pusantă una din tensiunie imită este egaă cu ero (cicurie pusatoare pot fi poitive şi negative); pentru soicitarea aternantă tensiunea îşi schimbă semnu în timpu soicitării; pentru soicitarea aternantă simetrică tensiunie imită au aceeaşi vaoare dar sensu contrar; soicitarea statică, osciantă şi pusantă pot fi poitive sau negative dupa cum tensiunea este de întindere sau de compresiune. Observaţii: m Stărie de soicitare variabiă cu tensiuni tangenţiae sunt caracteriate prin aceeaşi eemente ca şi stărie cu tensiuni normae; Casificarea preentată în dependenţă de coeficientu de asimetrie este apicabiă şi în cau tensiunior tangenţiae. 56
257 57 Tabeu 7..
258 7.3. Reistenţa a oboseaă. Curba Wőher. Numeroase încercări ae materiaeor pentru diferite cauri de variaţii ae tensiunior au permis să se stabiească următoaree ipotee de baă privind reistenţa a soicitări variabie: materiaee se pot rupe a tensiuni considerabi mai mici decât reistenţa a rupere şi chiar decât imita de curgere dacă tensiunie variaă de un număr suficient de ori; există o tensiune maximă (imită) pentru care materiau suportă fără să se rupă un număr practic neimitat de mare de variaţii ae tensiunii; mărirea ampitudinii tensiunii v micşoreaă vaoarea tensiunii maxime imită a cicuui. Ce mai răspândit tip de încercare a oboseaă în cau stării de tensiuni monoaxiae este încercarea a încovoiere pentru un cicu simetric de variaţie a tensiunior. Pentru determinarea moduui de comportare a materiauui a soicitări variabie se foosesc epruvete de secţiune circuară cu diametru d0mm, fără concentratori de tensiune, având suprafaţa şefuită supuse a o soicitare de încovoiere pură sau de încovoiere simpă. Epruvetee se monteaă pe o maşină de încercat, preentată schematic în figura 7.., şi sunt soicitate a încovoiere într-o mişcare de rotaţie cu o turaţie constantă (epruvetee sunt încastrate în dreptu unui capăt şi încarcate printr-o greutate P în dreptu capătuui iber). În timpu mişcării de rotaţie a epruvetei tensiunea normaă din dreptu unui punct oarecare îşi schimbă vaoarea după un cicu de soicitare aternant simetric. Epruveta se roteşte până a rupere. Pentru stabiirea comportării materiauui a soicitare variabiă se confecţioneaă mai mute epruvete care se încearcă a diferite forţe de încărcare cu vaori descrescătoare, începând de a imita de rupere statică. Se scade apoi treptat vaoarea forţei, reutatee obţinute 58
259 fiind repreentate într-un sistem de axe având în abscisă număru de cicuri până a ruperea epruvetei şi în ordonată tensiunea maximă de rupere. epruveta de încercat; partea de prindere a maşinii de încercat; 3 rument radia cu bie prin intermediu căruia se apică forţa de încărcare P asupra epruvetei. Figura 7.. Punctee obţinute se pot uni printr-o curbă, care se apropie asimptotic de o vaoare R a tensiunii normae, a care ruperea nu se produce niciodată, oricare ar fi număru de cicuri de soicitare variabiă. Această vaoare se numeşte reistenţă a oboseaă, iar curba obţinută poartă numee de curba Wőher sau curba de durabiitate (figura 7.3.). Figura
260 Reistenţa a oboseaă R este prin urmare egaă cu tensiunea maximă a care ruperea epruvetei soicitate variabi nu se produce nici după un număr foarte mare de cicuri. Aşadar reistenţa a oboseaă este cea mai mare vaoare a tensiunii, a care epruveta reistă un numar foarte mare de cicuri (de obicei acest numar se imiteaă a aproximativ 0 7 cicuri de încercare). Expresia aproximativă a curbei Wőher, dupa Basquin, este dată de reaţia: m R N f k (7.) unde: R - reistenţa a oboseaă; N f - numaru de cicuri până a distrugerea prin oboseaă; m, k constante de materia. Vaoarea reistenţei a oboseaă depinde de natura soicitării variabie exprimată prin mărimea coeficientuui de asimetrie R. Ca urmare se atribuie în notaţie, ca indice, coeficientu de asimetrie tensiunii maxime a cicuui corespunător reistenţei a oboseaă. Astfe, cu R se noteaă reistenţa a oboseaă a materiauui în cau unui coeficient de asimetrie oarecare. Pentru încercarea preentată mai sus s-a determinat reistenţa a oboseaă a cicuui aternant simetric. O curbă asemănătoare se obţine pentru cicu pusator şi atunci se determină 0. (figura 7.4.). Luând scări ogarirtmice curba Wőher poate fi repreentată prin drepte Figura
261 7.4. Diagrame ae reistenţeor a oboseaă Diagramee reistenţeor a oboseaă permit citirea vaorii reistenţeor a oboseaă în dependenţă de natura cicuui de soicitare variabiă, exprimat prin coeficientu de asimetrie. Se impune foosirea or în cacuu a oboseaă atunci când coeficientu de asimetrie a cicuui de tensiune este oarecare. Curba Wőher se obţine ce mai frecvent pentru cicu aternant simetric şi ce pusator. Dar, astfe de încercări se pot face pentru orice vaori ae coeficientuui de asimetrie R [,]. Se pune probema cum pot fi grupate toate reutatee obţinute pe o asemenea gamă de încercari. Aceasta se face foosind diagramee reistenţeor a oboseaă în coordonate m şi a (diagrame de tip Haigh). În figura 7.5. sunt preentate diagrame ae reistenţeor a oboseaă în coordonate m şi a (Haigh), schematiarea după o inie dreaptă (Goodman, Soderberg), eipsă (metoda Budugan) şi două drepte (metoda Serensen). Curba din repreentarea Haigh este curba cicurior imită sau curba reistenţeor a oboseaă. Punctu A repreintă cicu aternant simetric, iar punctu B cicu static. Punctee de pe curbă repreintă soicitarea pentru care coeficientu de siguranţă este ega cu. Un punct situat sub curba cicurior imită, repreintă un cicu de tensiune nepericuos, pe când un punct situat deasupra unu care conduce a rupere prin repetarea soicitării. Un punct L repreintă o reistenţă a oboseaă, corespunător unui anumit coeficient de asimetrie R: + (7.) R ml Locu geometric a cicurior asemenea, deci a cicurior cu aceaşi coeficient de asimetrie, este o inie dreaptă care trece prin originea sistemuui de referinţă. Pentru demonstrarea acestei afirmaţii din expresia coeficientuui de asimetrie: se exprimă ampitudinea tensiunior: R m m al a + a 6
262 a R + R m Figura 7.5 Se observă că egaitatea obţinută constituie chiar ecuaţia dreptei ce trece prin origne, în cau în care Rconst. Această dreaptă are coeficientu unghiuar: R tgϕ + R m Se observă următoaree trei cauri particuare:. R+ şi reută ϕ 0, ceea ce arată că axa absciseor este ocu geometric a soicitărior statice;. R- când se obţine ϕ 90, adică axa ordonateor constituie ocu geometric a cicurior aternant simetrice; o o 3. R0 când reută ϕ 45, ceea ce arată că prima bisectoare a sistemuui de referinţă este ocu geometric a cicurior pusante. Ea împarte în 6
263 două părţi domeniu soicitărior repreentate prin puncte situate în primu cadran a sistemuui de referinţă. Astfe punctee cu -<φ<0 repreintă cicuri aternante, iar punctee cu 0<φ<+ cicuri osciante. Pentru un anumit materia diagrama reistenţeor a oboseaă se construieşte prin puncte pe baa dateor din iteratură sau a încercărior a oboseaă. Pentru o repreentare cât mai exactă a curbei cicurior imită este necesar să se cunoască reistenţa a oboseaă pentru un număr cât mai mare de soicitări, caracteriate de diverşi coeficienţi de asimetrie, ceea ce este greu de reaiat pe cae experimentaă. Se determină cu uşurinţă reistenţa materiaeor a soicitare statică + (adică în cau materiaeor tenace imita de curgere c, iar pentru materiaee care nu au o imita de curgere pronunţată reistenţa statică de rupere r ). Nu necesită un voum prea mare de încercări nici determinarea reistenţei a oboseaă pentru cicu aternant simetric. Uneori se cunoaşte şi reistenţa a oboseaă pentru cicu pusant 0. Pe baa vaorior cunoscute se adoptă pentru cacuu a oboseaă diagrame schematiate ae reistenţeor a oboseaă. În figura 7.5. se preintă câteva diagrame schematiate în coordonatee m şi a :. diagrama schematiată printr-o inie dreaptă (Goodman, Soderberg) cu ecuaţia: m v + + (7.3). diagrama schematiată printr-un sfert de eipsă (metoda Budugan) având ecuaţia: m v + + (7.4) 3. diagrama schematiată prin două inii dreapte (metoda Serensen), obţinută unind punctee A şi L printr-o dreaptă şi trasând apoi din L o 63
264 dreaptă încinată cu aproximativ 45 o până în punctu B, corespunător tensiunii +. Observaţii: Consideraţiie de mai sus sunt apicabie şi în cau cicurior cu tensiuni tangenţiae. Deavantaju acestor schematiări constă în faptu că înătură o parte din capacitatea de reistenţă a materiauui, adică suprafaţa cuprinsă între iniie drepte şi curba reaă Factori care infuenţeaă reistenţa a soicitări variabie Ruperea a oboseaă a pieseor soicitate variabi în timp depinde de mai muţi factori: materiau şi tehnoogia de fabricaţie; natura soicitării; concentratorii de tensiune; dimensiunie piesei; starea suprafeţei piesei; tensiunie remanente; temperatura; acţiunea agenţior coroivi, etc. Observaţii: Efectu unora dintre aceşti factori se cunoaşte cantitativ, iar efectu atora numai caitativ. 64
265 Reistenţa a oboseaă a unei piese diferă de cea determinată pe epruvete. Vaoarea acestei reistenţe se determină cu ajutoru unor coeficienţi de corecţie ateriau şi tehnoogia de fabricaţie Fiecare materia posedă ate caracteristici mecanice, deci ate caracteristici a soicitări variabie. Cu cât reistenţa statică a materiauui este mai mare cu atât şi reistenţa a oboseaă are o vaoare mai ridicata. Dacă materiau are o structură mai omogenă şi o granuaţie mai mică, atunci e reistă mai bine a soicitarea variabiă. Un tratament termic corect executat determină îmbunătăţirea reistenţei a oboseaă. O înfuenţă favorabiă asupra comportării a soicitarea variabiă au forjarea şi aminarea pe direcţia eforturior Natura soicitării Natura soicitării variabie preintă o importanţă deosebită aături de mărimea soicitării. Dintre soicitărie simpe reistenţa a oboseaă pentru soicitarea de încovoiere are vaoarea cea mai mare, deoarece tensiunie de încovoiere sunt mari numai într-o onă restrânsă a secţiunii transversae. Reistenţa a oboseaă depinde şi de coeficientu de asimetrie a cicuui, vaoarea cea mai mică fiind cea corespunătoare cicuui aternant simetric Concentratorii de tensiune În cacuee efectuate până în preent nu s-a uat în consideraţie efectu schimbării de secţiune, adică trecerea de a o secţiune a ata. Cercetărie teoretice şi experimentae au aratat ca în ocurie de variaţie bruscă a secţiunior transversae (găuri, gâtuiri, canae de pană, racordări, etc.) şi în ona contacteor dintre corpurie soide se produc concentrări de tensiune. Tensiunie nu mai corespund ceor cacuate cu formuee casice din reistenţă, au vaori mut mai mari (vaorie sunt cu atât mai mari cu cât schimbarea de secţiune este mai bruscă şi raa de racordare mai mică) şi în unee cauri dirijarea or este spaţiaă. 65
266 Pentru cacuee de reistenţă a soicitărior statice s-a definit un coeficient teoretic de concentratre, ega cu raportu dintre tensiunea maximă din concentrator şi tensiunea nominaă: max α k (7.5) n Tensiunea nominaă repreintă tensiunea cacuată (cu reaţiie stabiite de Reistenţa materiaeor) fie în ipotea absenţei cocentratoruui, fie fără uarea în consideraţie a perturbaţiei câmpuui forţeor interioare cauate de către concentrator. Se numeşte coeficient efectiv de concentratre a tensiunior constante în timp, coeficientu care indică de câte ori concentratoru reduce capacitatea portantă a piesei. Acest coeficient de concentrare trebuie uat în consideraţie în specia a cacuu bareor confecţionate din materiae fragie. La materiaee tenace efectu de concentrare este mai puţin pericuos. Efectu de concentrare se produce întotdeauna şi în cau soicitărior variabie, dar coeficientu de concentrare are o vaoare puţin mai mică decât în cau soicitărior statice, datorită unei uşoare egaiări a tensiunior prin variaţia soicitării. Pentru cacuu soicitărior variabie se fooseşte un coeficient numit coeficientu efectiv de concentrate a tensiunior β k care indică de câte ori este mai mare reistenţa a oboseaă a epruvetei fără concentrator decât reistenţa a oboseaă a epruveteor cu concentrator. Pentru determinarea acestui coeficient se utiieaă epruvete cu şi fără concentrator, pentru care se determină reistenţa a oboseaă. Coeficientu efectiv de concentrate a tensiunior β k se defineşte prin raportu dintre reistenţa a oboseaă pentru o epruvetă netedă fără concentrator ( ) şi reistenţa a oboseaă a piesei cu concentrator ( ), având aceaşi coeficient de asimetrie R: Rk β R k (7.6) Rk R 66


267 Observaţii: Vaoarea coeficientuui efectiv de concentrare depinde de forma şi dimensiunie concentratoruui, de materia şi de natura soicitării. Coeficientu este întotdeauna mai mare ca unitatea. Se remarcă faptu că reistenţa a oboseaă a epruvetei cu concentrator ( Rk ) se cacueaă ca tensiune nominaă. Vaorie ae coeficientuui efectiv de concentrare se dau în tabee şi diagrame. Vaorie coeficientuui efectiv de concentrate pentru diferiţi concentratori de tensiuni sunt date în figurie , 7.3, 7.4, şi în Tabeu 7.. Figura 7.6 Figura


268 Figura 7.8 Figura 7.9. Se observă că vaoarea coeficientuui efectiv de concentrare este cu atât mai mare cu cât raa de racordare este mai mică şi cu cât materiau are o reistenţă de rupere mai ridicată. De menţionat că, în cau când raportu diametreor D/d este diferit de se face o corecţie supimentară prin coeficientu ξ (figura 7.0) cu reaţia următoare: β + ξ ( β ) (7.7) k ko unde D β ko este coeficientu de concentrare pentru raportu diametreor. d 68
269 Figura 7.0. Dacă se caută coeficientu efectiv de concentrare pentru un oţe cu reistenţa r oarecare, căreia nu-i corespunde nici o curbă pe aceste diagrame, se poate foosi reaţia: β ξ (7.8) k β ko unde ξ este un coeficient dat în figura 7. pentru încovoiere şi în figura 7. pentru torsiune, iar β ko corespunde oţeuui carbon cu r 500Pa. Figura

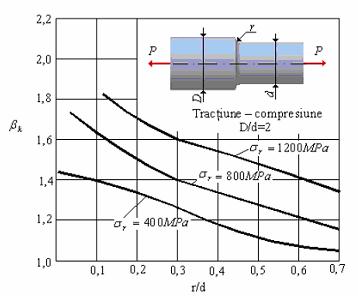
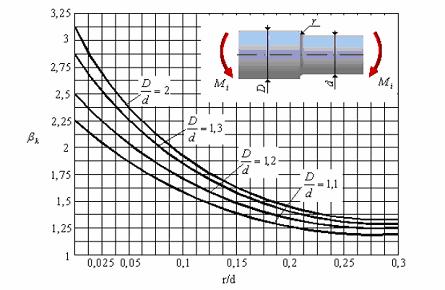
270 Figura 7.. Figura 7.3. Figura
 k k k unde η k este un coeficient de sensibiitate a crestături (figura 7.5). Figura 7.5. În figura 7.5 se dau vaorie acestui coeficient pentru oţeuri.")
271 În ipsa dateor experimentae, coeficientu efectiv de concentrare poate fi determinat în funcţie de coeficientu teoretic de concentrare a tensiunior k, cu reaţia: β k β + η ( α ) (7.9) k k k unde η k este un coeficient de sensibiitate a crestături (figura 7.5). Figura 7.5. În figura 7.5 se dau vaorie acestui coeficient pentru oţeuri. ărimea coeficientuui depinde de natura oţeuui şi de raa de racordare a crestăturii. Figura
272 Pentru oţeuri de mare reistenţă coeficient de sensibiitate are o vaoare apropiată de unitate. Pentru oţeuri de construcţie, în medie acest coeficient este cuprins între 0,6 şi 0,8, iar pentru fontă η k 0. Aceasta se expică prin existenţa în fonta turnată a unui număr mare de concentratori (neomogenitatea structurii, incuiuni, gouri). În figura 7.6 curba se referă a raportu a/d0,05 0, şi d40 50mm, curba a raportu a/d0,5 0,5 şi d40 50mm, iar curba 3 a raportu a/d0,5 0,5 şi d6 8mm. Figura 7.7. Figura
273 Figura 7.9. Figura 7.0. Curba din figura 7.0 are în vedere arboree cu piesa montată pe e, iar curba arboree fără piesă De reţinut: Concentratorii de tensiune micşoreaă reistenţa pieseor supuse a soicitări variabie. Ca urmare, configuraţia geometrică a organeor de maşini trebuie proiectată încât efectu de concentrare a tensiunior să fie cât mai redus. În acest sens este necesar să se evite pe cât posibi 73
274 schimbărie bruşte de secţiune ae pieseor în specia în apropierea secţiunior în care tensiunie sunt mari. Tabeu Dimensiunie piesei Experienţa a arătat ca odată cu creşterea dimensiunior secţiunii transversae reistenţa a soicitări variabie scade. Această constatare se expică prin faptu că, cu cât voumu şi suprafaţa piesei sunt mai mari, cu atât mai numeroase sunt încuiunie nemetaice din piesă, porii, cristaee orientate diferit. Aceşti mici concentratori de tensiune pot constitui caue ae apariţiei microfisurior şi începuturior de ruptură. Prin urmare cu cât piesa este mai mare cu atât sunt mai mari şi şansee de apariţie ae microfisurior, toate piesee reae cu un diametru d>0mm având o reistenţă a oboseaă mai mică decât cea obţinută prin încercări. Pentru a expica fenomenu micşorii reistenţei a oboseaă o dată cu creşterea dimensiunior pieseor s-au emis două ipotee. Prima ipoteă expică fenomenu prin faptu că o dată cu creşterea dimensiunior pieseor creşte număru particueor de materia dispuse a suprafaţă care se găsesc în starea cea mai soicitată (încovoiere, răsucire), ceea ce măreşte probabiitatea existenţei 74

275 diferiteor defecte (sufuri, microfisuri, incuiuni, urme de preucrare prin aşchiere) în stratu superficia. În aceste ocuri începe de obicei devotarea fisurior a oboseaă a căror creştere este deosebit de intensă în cau gradienţior mici de variaţie a tensiunior. A doua ipoteă expică micşorarea reistenţei a oboseaă o dată cu creşterea dimensiunior pieseor prin faptu că a preucrarea mecanică a pieseor de dimensiuni mici se produc deformaţii pastice ae stratuui superficia a o adâncime reativ mai mare decât a epruvetee de dimensiuni mari. Tensiunie remanente care iau naştere a deformarea pastică infuenţeaă favorabi asupra reistenţei a oboseaă. Pentru cacuu a oboseaă se defineşte un factor dimensiona ε prin raportu dintre reistenţa a oboseaă, pentru un cicu aternant simetric, a unei piese sau epruvete de diametru oarecare d şi reistenţa a oboseaă a epruvetei de diametru d o 0mm: ( ) d ε (7.9) ( ) Variaţia factoruui dimensiona, în dependenţă de diametru bareor de secţiune circuară pentru soicitarea de încovoiere este îndicată în figurie 7., 7.. d o Figura 7.. În figura 7. curbee şi se referă a oţe carbon neted, bine ustruit respectiv şefuit, 3, 4 şi 5 a oţe aiat ustruit, şefuit, respectiv cu concentrări uşoare de tensiune, iar curba 6 a oţe de construcţii cu r 650Pa. 75

276 Figura 7.. Vaorie factoruui dimensiona în dependenţă de diametru arborior de secţiune circuară, pentru soicitarea de torsiune, sunt indicate în figura 7.3. Figura 7.3. dimensiona În figura 7.4 se dau coeficieţii de concentrare, incusiv factoru β k. Graficu este construit pentru oţe carbon cu r 500Pa, ε respectiv pentru o presiune între bucşe şi arbore p 30Pa. Curba se referă a arbore încărcat prin forţă şi cupu, iar curba a arboree neîncărcat. Pentru ate reistenţe de rupere, respectiv ată presiune de fretaj, coeficientu de concentrare este: β unde k ε 0 βk βk ' '' ξ ξ (7.0) ε ε sunt vaorie din figura
 se iau din figurie 7.5 şi 7.6. Figura 7.5. Figura 7.6. 77")
277 Figura 7.4. Cei doi coeficienţi de corecţie din reaţia (7.0) se iau din figurie 7.5 şi 7.6. Figura 7.5. Figura
278 Starea suprafeţei Experienţa a arătat că starea suprafeţei pieseor are o infuenţă deosebită asupra ruperii a oboseaă. O piesă cu suprafaţa preucrată fin, ipsită de gârieturi sau fisuri, reistă mut mai bine a soicitări vabiabie decât o piesă cu suprafaţa preucrată grosoan sau cu suprafaţa corodată. Această infuenţă este mai pronunţată a soicitarea de torsiune şi de încovoiere, a care tensiunie cee mai mari apar în dreptu conturuui secţiunior. Zgârieturie, micie crăpături, urmee cuţituui de aşchiere sunt de fapt concentratori de tensiune. Efectu acestor concentratori este cu atât mai redus cu cât suprafaţa piesei este preucrată mai fin şi mai îngrijit, în specia în cau oţeurior aiate, deosebit de sensibie faţă de concentrarea tensiunior. Pentru a ua în consideraţie în cacu starea suprafetei pieseor, se defineşte drept coeficient de caitate a suprafeţei γ raportu dintre reistenţa a oboseaă a unei epruvete având caitatea suprafeţei oarecare s şi reistenţa a oboseaă a unei epruvetei cu suprafaţa şefuită, ipsită de concentratori : s γ (7.) Vaorie coeficientui de caitate a suprafeţei γ pentru diverse moduri de preucrare a suprafeţei, în funcţie de reistenţa a rupere, sunt îndicate în figura 7.7. Cee şase curbe se referă a: curba a epruveta ustruită, curba a şefuire fină, curba 3 a şefuire sau strunjire fină, curba 4 a suprafaţa aminată cu crustă, curba 5 a coroiune în apă duce, curba 6 a coroiune în apă sărată. Coeficientu de caitate a suprafeţei γ este cu atât mai mic cu cât suprafaţa este preucrată mai grosoan. Pe ângă preucrarea fină a suprafeţei, se utiieaă uneori tratamente de suprafaţă, prin care se obţin coeficienţi de caitate cu vaori mai mari. Astfe, se pot apica tratamente termice sau termochimice ca cementarea, nitrurarea, căirea cu facără sau prin curenţi de înată frecvenţă, de asemenea tratamente mecanice ca ruarea cu roe, ecruisarea cu jet de aice, etc. 78

279 Figura 7.7. Reutatee încercărior a oboseaă au demonstrat că: în cau nitrurii oţeurior carbon reistenţa a oboseaă creşte cu până a 50%, iar în cau oţeurior cu crom creşterea nu depăştete 5% ; epruvetee din fontă supuse căirii prin curenţi de înată frecvenţă, atât cee netede cât şi cee cu crestătură, au o reistenţă a oboseaă cu 0-5% mai mare; ruarea cu roe a epruveteor netede de oţe determină o creştere a reistenţa a oboseaă a acestora cu 0%-30%; ustruirea hidrodinamică permite creşterea reistenţei a oboseaă cu 5%. Dacă piesa ucreaă într-un mediu coroiv şi se oxideaă sau dacă suprafaţa ei se acoperă prin nicheare, cromare, arămire sau incare coeficientu de caitate îşi micşoreaa vaoarea. Astfe: nichearea duce a o reducere cu până a 35% a reistenţei a oboseaă (reistenţa statică nu se reduce prin nicheare); reistenţa a oboseaă se reduce cu până a 5% datorită arămirii; 79
280 apicarea acoperirior cu acuri şi vopsee, grunduirea nu au o infuenţă apreciabiă asupra reistenţei a oboseaă a pieseor. De reţinut Ţinând cont de efectu cantitativ simutan a ceor trei factori preentaţi mai sus (concentratorii de tensiune, dimesniunie piesei, starea suprafeţei piesei) reistenţa a oboseaă a unei piese reae (, pentru un cicu aternant ) p simetric, diferă de cea determinată pe epruvete şi se determină cu reaţia: p (7.) β ( ) ε γ unde: β k - coeficientu efectiv de concentrate a tensiunior; ε - factoru dimensiona; γ - coeficientu de caitate a suprafeţei. k Cei trei coeficienţi depind de natura soicitării şi se determină, de obicei, pentru soicitări aternant simetrice Temperatura Probemei reistenţei a oboseaă în cau temperaturior ridicate i se acordă o atenţie deosebită, datorită niveuui înat a regimurior de temperatură în condiţiie de expoatare ae unor piese. În unee cauri preintă un mare interes şi reistenţa a soicitări variabie a materiaeor a temperaturi joase. Cercetărie experimentae privind infuenţa temperaturii asupra reistenţei a oboseaă au arătat că prin creşterea temperaturii piesei scade reistenţa ei a soicitarea variabiă, iar prin scăderea temperaturii sub cea normaă reistenţa a oboseaă creşte. La temperaturi ridicate curba Wőher nu mai preintă o asimptotă oriontaă, ci coboară în mod continuu a nivee tot mai mici de soicitare. La oţeuri, peste 300 o C se produce o scădere a reistenţei a oboseaă cu 5-0%, pentru fiecare creştere a temperaturii cu 00 o C. 80
281 7.6. Cacuu coeficientuui de siguranţă a soicitării variabie La proiectarea subansamburior şi a organeor de maşini, cacuu de reistenţă se efectueaă de obicei prin metoda aproximaţiior succesive. La început, în funcţie de condiţiie tehnice date se efectueaă un cacu preaabi şi se determină cotee principae ae piesei. Cu datee orientative obţinute se întocmeşte schiţa de proiect a subansambuui. Dimensiunie aese se rotunjesc şi se modifică în concordanţă cu considerentee constructive, standardee şi normativee în vigoare. Baându-se pe schiţa de proiect astfe întocmită se efectueaă cacuee de verificare a căror scop este determinarea coeficienţior de siguranţă a piesee cee mai soicitate ae subansamburior. După aprecierea coeficienţior de siguranţă din nou se fac schimbări şi corecturi în desene şi din nou se execută cacue de verificare. Determinarea directă a dimensiunior pieseor în funcţie de reistenţee admisibie date este posibiă numai în cauri foarte simpe. Prin urmare, forma de baă a cacuuui o constituie cacuu de verificare, cu determinarea coeficienţior de siguranţă, urmată de aprecierea acestora. Probemee aprecierii coeficienţior de siguranţă şi a aegerii reistenţeor admisibie trebuie reovate pe parcursu proiectării cu uarea în consideraţie a indicior tehnico-economici. Probema de baă a cacuu coeficienţior de siguranţă este determinarea stării imită urmată de cacuu sarcinior şi tensiunior imită ae piesei (subansambuui) de cacuat. În genera, în cau soicitărior variabie, dimensionarea se face tot după metoda reistenţeor admisibie, ca şi în cau soicitărior statice. Cacuu a oboseaă este, în primu rând, un cacu de verificare. E se poate efectua după aegerea tuturor dimensiunior piesei şi a tehnoogiei de fabricaţie. Verificarea a soicitarea variabiă constă din cacuu coeficientuui de siguranţă a soicitării produse în secţiunie pericuoase ae piesei. Pentru ca piesa cacuată să reiste a 8
282 soicitarea variabiă este necesar să se obţină un coeficient de siguranţă a soicitării mai mare decât ce indicat în memoratoaree inginereşti. Se defineşte drept coeficient de siguranţă a soicitare variabiă raportu dintre reistenţa a oboseaă a piesei şi tensiunea maximă produsă în piesă: R piesa c (7.3) max Ţinând cont de reaţia (7.) reistenţa a oboseaă a piesei pentru un cicu cu coeficientu de asimetrie R este dată de reaţia: unde: R R piesa ε γ (7.4) β k R - repreintă reistenţa a oboseaă determinată pe epruvete normaiate pentru cicu cu coeficient de asimetrie R. În tabeu 7.3. sunt indicate vaori ae coeficienţior de siguranţă a oboseaă. Aceşti coeficienţi au vaori reativ mici, întrucât cacuu presupune o cunoaştere cât mai exactă a factorior care duc a ruperea prin oboseaă. Tabeu 7.3. Feu piesei c Piese din oţe,5-,7 Piese uşoare din oţe,3-,4 Piese importantă din oţe, cu încercarea a oboseaă,35 făcută pe piesă Piese din oţe turnat,4- Piese de fontă -3 Piese din aiaje de cupru -,7 Piese din aiaje uşoare -,5 Astfe, coeficientu de siguranţă a soicitări variabie devine: 8
283 ε γ R c (7.5) β k Reaţia (7.5) pentru coeficientu de siguranţă poate avea o serie de forme particuare dependente de natura soicitării, după cum urmeaă: max. Cicu aternant simetrice ( max v ). În acest ca coeficientu de siguranţă este: c (7.6) βk v ε γ. Soicitarea variabiă cu coeficient de asimetrie oarecare. În acest ca se va face ape a una din diagramee reistenţeor a soicitări variabie. În majoritatea metodeor de cacu se admite că trecerea de a cicu rea a cicu imită se face păstrând aceaşi cicu de asimetrie Rconst. (metoda Sodeberg). Se admite pentru cacuu unei piese soicitate variabi diagrama schematiată printr-o inie dreaptă (Soderberg) preentată în figura 7.8. v A L - A 0 B m + B Figura 7.8. S-a arătat că toate cicurie afate înafara dreptei AB sau cuprinse pe această dreaptă conduc a ruperea piesei. Deci dreapta AB arată imita reistenţei 83
284 a soicitări variabie pentru un cicu oarecare. Dacă se împart coordonatee acestei drepte prin coeficientu de siguranţă c se va obţine dreapta A B care imiteaă diagrama reistenţeor admisibie. Un punct oarecare are coordonatee curente m şi v. Atunci coeficientu de siguranţă a soicitării poate fi exprimat în feu urmator: R( L ) ml + vl ml vl c (7.7) + max( ) Ţînând cont de reaţia 7.3, particuariată pentru punctu L, se obţine: sau ţinând cont de reaţia 7.7: de unde: ml m ml c m + vl + m + vl v v + v m + v + Se obţine expresia coeficientuui de siguranţă corespunător doar reistenţeor obţinută în aborator: c v + Pentru piesa reaă trebuie introduşi cei trei factori şi astfe expresia coeficientuui de siguranţă, pentru schematiarea curbei cicurior imită printr-o inie dreaptă, este: m + + m c βk v (7.8) m + ε γ În cau schematiării printr-un sfert de eipsă (metoda Budugan) având ecuaţia: ml + vl + v 84
285 se obţine în mod asemănător: c (7.9) βk v m + ε γ + După metoda Serensen pentru cicurie aternante (-<R<0) reută: iar pentru cicurie osciante (0<R<+): c β k v + ψ m ε γ (7.0) o ψ c o + (7.) β k v + m ε γ Observaţie: Pentru soicitarea de torsiune reaţiie sunt identice, dar se schimbă tensiunea cu tensiunea τ. În acest ca coeficientu de concentrare a tensiunior, factoru dimensiona şi factoru de caitate a suprafeţei sunt diferiţi de cei pentru starea de tensiuni monoaxiaă. 3. Soicitarea variabiă compusă de încovoiere cu torsiune Pentru cacuu a oboseaă a soicitărior variabie compuse se pot utiia coeficieţii de siguranţă parţiai c şi c, care au în vedere câte o singură soicitare, corespunătoare tensiunior normae (încovoierea), respectiv tensiunior tangenţiae (torsiunea). etoda de cacu se referă în primu rând a stări de soicitare aternant simetrice, când: max τ max min τ τ τ min Coeficienţii de siguranţă parţiai se definesc ţinând cont de reaţia (7.3.): v v 85
286 c c τ τ τ piesa max piesa max respectiv în dependenţă de reistenţa a oboseaă a epruvetei normaiate: coordonate c c τ εγ β k εγ τ β τ k Pe cae experimentaă s-a trasat o curbă a reistenţeor a oboseaă în v v şi τ v pentru soicitărie variabie de încovoiere cu torsiune, produse prin cicuri aternant simetrice care acţioneaă simutan şi în faă (figura (7.9)). v τ v τ - A c L cconst τ vl τ v 0 B v v vl - Figura 7.9. Un punct oarecare exprimă o anumită stare de soicitare compusă, caracteriată prin ampitudinie cicurior v şi τ v ae ceor două soicitări. Pe axa absciseor ( τ v 0) sunt repreentate numai stări de încovoiere cu reistenţa a oboseaă, în schimb pe axa ordonateor ( ) v 0 stări de torsiune cu 86
287 reistenţa a oboseaă τ. La acţiunea simutană a ceor două soicitări ruperea a oboseaă se produce în dreptu unui punct L de coordonate: vl vl < < τ τ Curba reistenţeor a oboseaă (ocu geometric a puncteor cu coeficientu de siguranţă c) poate fi aproximată cu o eipsă de ecuaţie: vl vl + τ τ O eipsă asemenea cu aceasta repreintă ocu geometric a stărior compuse de soicitare cu aceaşi coeficient de siguranţă. Coeficientu de siguranţă a stării de soicitare compusă, repreentată prin punctu, se cacueaă de obicei faţă de starea imită definită de punctu L, situat pe dreapta O, care trece prin originea sistemuui de referinţă. Astfe, se admite că probabia creştere a soicitărior se produce prin menţinerea constantă a raportuui dintre mărimie caracteristice ae ceor două soicitări. Coeficientu de siguranţă a soicitării variabie compuse este: v vl v vl c τ τ Se transcrie ecuaţia eipsei, înmuţind şi împărţind fracţiie cu aceeaşi mărime : v v vl v v vl + τ τ τ τ şi reută c c c c + τ respectiv, reaţia pentru cacuu coeficientuui de siguranţă a soicitărie compuse, (reaţia ui Gough şi Poard): c c c c c τ τ + (7.) 87
288 unde c şi c sunt coeficienţii de siguranţă parţiai ai soicitărior simpe τ componente determinaţi prin metodee arătate mai sus. Prin urmare cu ajutoru reaţiei (7.) cacuu a oboseaă se reduce a determinarea coeficienţior de siguranţă parţiai ai soicitărior simpe. La materiaee fragie se noteaă cu φ τ, raportu imiteor a oboseaă a cicurie aternant simetrice de încovoiere şi torsiune, iar coeficientu de siguranţă se determină cu reaţia: c c c c φ c c (7.3) τ ( ) + ( φ ) + care pentru φ devine identică cu reaţia anterioară. Observaţii: Coeficienţii de siguranţă parţiai trebuie sa îndepinească condiţia: c c a, c c. τ a Coeficientu de siguranţă goba trebuie să îndepinească condiţia: c c a. Reaţia (7.3) este vaabiă pentru materiae tenace şi ar trebui să fie apicată numai pentru cicurie aternant simetrice de încovoiere cu torsiune. Convenţiona ea se poate apica şi pentru soicitărie variabie oarecare, însa în aceste cauri coeficienţii de siguranţă a soicitări simpe se determină cu formuee corespunătoare. Apicaţii:. Un arbore de oţe (τ c 40Pa, τ - 0P) de secţiune circuară este soicitat a torsiune după un cicu osciant (momentu de torsiune variind de a o vaoare minimă tmin 0 6 Nmm pâna a o vaoare maximă tmax 0 6 Nmm). Se cere să se cacuee diametru arboreui, dacă se admite un coeficient de siguranţă c,5. Se dau: coeficientu dimensiona ε τ 0,8, coeficientu efectiv 88
289 de concentrare a tensiunior în secţiunea pericuoasă β τ,36, coeficientu de caitate a suprafeţei strunjite fin γ 0,6. reaţia Reovare: Tensiunea tangenţiaă în cau soicitării de torsiune se cacueaă cu t t τ W 3 p π d (7.4) 6 Tensiunie tangenţiae sunt proporţionae cu momentee de răsucire: τ τ max min t max t min Eementee caracteristice ae cicuui sunt: 6 τ min 0,5 τ - tensiunea medie: τ m ( τ max + τ min ) 0, 75 τ max - ampitudinea cicuui: τ v ( τ max τ min ) 0, 5 τ max Coeficientu de siguranţă se determină cu reaţia (7.8): sau înocuind vaorie numerice: de unde reută:,5 c τ βτ τ v ε γ τ τ,36 0,5 τ 0,6 0,8 0 τ + τ m + τ max 36,6Pa Din reaţia (7.4) se determină diametru arboreui: 0, max τ max max t 0, τ d 3 max 3 max 6 0 0, 36,6 65mm 89
290 . Se consideră arboree strunjit din oţe carbon soicitat a o încovoiere osciantă cu î max Nmm şi î min Nmm (figura 7.30.). Cunoscând c 600Pa, - 360Pa, r 800Pa se cere vaoarea coeficientuui de siguranţă. Figura Reovare: Tensiunie din secţiunea pericuoasă sunt: max i W max 5 0 π ,6 Pa i min 75 0 min 34,8Pa W 3 π 60 3 max + min m 5,Pa max min v 7,4Pa Se aeg următoaree vaori pentru coeficienţii de corecţie: - factoru dimensiona: ε 0,77 (oţe carbon şi d60mm); - factoru de caitate a suprafeţei: γ 0,8 (pentru r 800Pa, strunjit); - factoru de concentrare: k o,6 (pentru r 800Pa şi r/d6/600,), cu ξ 0,6 pentru D/d80/60,33 reută: 90

291 β k + ξ ( k ) + 0,6(,6 ),36 Coeficientu de siguranţă este: c βk v ε γ + m + 0,36 0, 77 7,4 + 0, , 600 5,5 3. Arboree din figura 7.3, confecţionat din oţe OL 50 cu următoaree caracteristici c 300Pa, - 00Pa, τ c 90Pa, τ - 0Pa, este supus unei soicitări variabie compuse de încovoiere cu torsiune. omentee variaă între vaorie: î max 0 5 Nmm şi î min Nmm, tmax 0 5 Nmm şi tmin 0 Nmm. Arboree are suprafaţa şefuită. Se cere să se verifice arboree a oboseaă. D 40mm, d 5mm, r 3mm. Figura 7.3. Reovare: Pentru a determina coeficientu de siguranţă goba pentru soicitarea de încovoiere cu torsiune este necesar să se cacuee coeficienţii de siguranţă parţiai c şi c. Eementee cicurior de încovoiere, respectiv de torsiune sunt: τ 9
292 max min m v i W i W τ τ τ max min m v max max t W t W τ τ τ max max max min + max min p p + τ τ 97 7, min min 5 0 π Pa 4Pa 6,5Pa 0 π 5 6 0Pa min min 5 3 6,9Pa 6,9Pa 30,3Pa 3,59Pa Pentru d 5mm factorii domensionai au vaorie: ε 0,9 şi ε τ 0,84, iar factorii care ţin cont de caitatea suprafeţei arboreui sunt egai cu γ γ τ. Coeficienţii efectivi de concentrare a tensiunior sunt: β +(,4-),4 β τ +(,5-),5 În cau schematiării cicuui printr-o dreaptă (Sodeberg) coeficienţii de siguranţă parţiai au vaorie: c c τ β ε γ βτ ε γ τ τ v τ v τ + m + τ + m τ +,4 0,9 6,5 + 00,5 6,9 + 0, ,9 90,97 3,475 Coeficientuui de siguranţă a soicitărie variabie compuse se cacueaă cu reaţia ui Gough şi Poard (reaţia 7.) şi se obţine: 9

293 c c c c τ τ + c,97 3,475,97 + 3,475, 7 4. Tija din figura 7.3 este confecţionată dintr-un oţe aiat cu r 0 3 Pa, -t 50Pa, are suprafaţa şefuită şi este soicitată a un cicu aternant simetric. Se cere să se determine forţa maximă cu care poate fi soicitată tija dacă se admite un coeficient de siguranţă c. D 60mm, d 40mm, r 8mm. Figura 7.3. Reovare: Din figura 7.3, pentru vaorie date se obţine pentru coeficientu efectiv de concentrare a tensiunioe vaoarea β k,7. Coeficientu dimensiona este ε, iar coeficientu de caitate γ. Reistenţa admisibiă a oboseaă pentru soicitarea de tracţiune se determină din reaţia: c ε γ β Seţiunea minimă a tijei este: k t a iar forţa maximă capabiă are vaoarea: a ε γ β c k t π d π 40 A min ,53Pa 7, 56mm Pmax a Amin 73, N 93

294 5. Arboree din figura confecţionat din oţe aiat, cu următoaree caracteristici r 00Pa, - 500Pa, transmite o putere P 44kW a o turaţie n 500rot/min. Dacă suprafaţa arboreui este rectificată ce vaoare are coeficientu de siguranţă pentru soicitarea a torsiune cu un cicu pusant? Se consideră τ r r / şi τ - - /. D 0mm, d 80mm, r 0mm Figura Reovare: omentu de torsiune care soicită arboree se determină cu reaţia stabiită în prima parte a cursuui de Reistenţa materiaeor: sau înocuind vaorie: t t 30 π P n ,9kN m π 500 În secţiunea pericuoasă tensiunea tangenţiaă maximă este: τ 6 t t max W 3 p π d 6 7, π ,64Pa Se aeg următoaree vaori pentru coeficienţii de corecţie: - din figura 7.8 pentru r/d0,5 şi r 00Pa se aege β k,5; - din figura 7.3 se aege ε 0,7; 94
REZISTENŢA MATERIALELOR
 MOCANU FLORENTINA REZISTENŢA MATERIALELOR PARTEA I Noţiuni recapituative Noţiuni fundamentae Încercarea materiaeor. Ipotee simpificatoare. Metode de cacu în Reistenţa materiaeor Teoreme şi metode energetice
MOCANU FLORENTINA REZISTENŢA MATERIALELOR PARTEA I Noţiuni recapituative Noţiuni fundamentae Încercarea materiaeor. Ipotee simpificatoare. Metode de cacu în Reistenţa materiaeor Teoreme şi metode energetice
SOLICITĂRI AXIALE. 2.1 Generalităţi
 . SOLICITĂRI XIL. Generaităţi O bară dreaptă este supusă a întindere sau a compresiune dacă în secţiunie sae transversae există forţe axiae. Într-o secţiune, dacă forţa axiaă este orientată spre exterioru
. SOLICITĂRI XIL. Generaităţi O bară dreaptă este supusă a întindere sau a compresiune dacă în secţiunie sae transversae există forţe axiae. Într-o secţiune, dacă forţa axiaă este orientată spre exterioru
RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii transversale, scrisă faţă de una dintre axele de inerţie principale:,
 REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
Cuprins. 12. Metode energetice 1
 Prefaţă Voumu conţine partea a doua a cursuui de Rezistenţa materiaeor care se predă studenţior anuui IIA a facutăţii de Inginerie Mecanică, a Universitatea Poitehnica Bucureşti. În ediţia de faţă, s-au
Prefaţă Voumu conţine partea a doua a cursuui de Rezistenţa materiaeor care se predă studenţior anuui IIA a facutăţii de Inginerie Mecanică, a Universitatea Poitehnica Bucureşti. În ediţia de faţă, s-au
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
 10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
10. STABILIZATOAE DE TENSIUNE 10.1 STABILIZATOAE DE TENSIUNE CU TANZISTOAE BIPOLAE Stabilizatorul de tensiune cu tranzistor compară în permanenţă valoare tensiunii de ieşire (stabilizate) cu tensiunea
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
CURS METODA OPERAŢIONALĂ DE INTEGRARE A ECUAŢIILOR CU DERIVATE PARŢIALE DE ORDIN II
 CURS METODA OPERAŢIONALĂ DE INTEGRARE A ECUAŢIILOR CU DERIVATE PARŢIALE DE ORDIN II. Utiizarea transformării Lapace Să considerăm probema hiperboică de forma a x + b x + c + d = f(t, x), (t, x) [, + )
CURS METODA OPERAŢIONALĂ DE INTEGRARE A ECUAŢIILOR CU DERIVATE PARŢIALE DE ORDIN II. Utiizarea transformării Lapace Să considerăm probema hiperboică de forma a x + b x + c + d = f(t, x), (t, x) [, + )
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
4.8 Determinarea conductivităţii termice şi a difuzivităţii termice în cazul materialelor solide
 . Determinarea conductivităţii termice şi a difuzivităţii termice în cazu materiaeor soide Conductivitatea termică (reaţia.0) şi difuzivitatea termică a (reaţia (.)) sunt două mărimi de materia care caracterizează
. Determinarea conductivităţii termice şi a difuzivităţii termice în cazu materiaeor soide Conductivitatea termică (reaţia.0) şi difuzivitatea termică a (reaţia (.)) sunt două mărimi de materia care caracterizează
ÎNCOVOIEREA BARELOR DREPTE
 CPTOLUL 6 ÎNCOVOERE BRELOR DREPTE 6.1. Încovoierea pură. Formula lui Navier. Considerăm bara de secţiune dreptungiulară din Fig.6.1, pentru care s-au trasat diagramele de eforturi T şi M. Fig.6.1 Se observă
CPTOLUL 6 ÎNCOVOERE BRELOR DREPTE 6.1. Încovoierea pură. Formula lui Navier. Considerăm bara de secţiune dreptungiulară din Fig.6.1, pentru care s-au trasat diagramele de eforturi T şi M. Fig.6.1 Se observă
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Beton de egalizare. Beton de egalizare. a) b) <1/3
 b) <1/3") II.6.. Fundaţii ti taă de eton armat Fundaţiie ti taă de eton armat entru stâi şi ereţi de eton armat ot fi de formă rismatiă (Fig. II.4-a) sau formă de oeis (Fig. II.4-).
II.6.. Fundaţii ti taă de eton armat Fundaţiie ti taă de eton armat entru stâi şi ereţi de eton armat ot fi de formă rismatiă (Fig. II.4-a) sau formă de oeis (Fig. II.4-).
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
a. 11 % b. 12 % c. 13 % d. 14 %
 1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
1. Un motor termic funcţionează după ciclul termodinamic reprezentat în sistemul de coordonate V-T în figura alăturată. Motorul termic utilizează ca substanţă de lucru un mol de gaz ideal având exponentul
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
14. Grinzi cu zăbrele Metoda secţiunilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...4
 SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
13. Grinzi cu zăbrele Metoda izolării nodurilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...
 SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
SEMINAR GRINZI CU ZĂBRELE METODA IZOLĂRII NODURILOR CUPRINS. Grinzi cu zăbrele Metoda izolării nodurilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele
Capitolul 14. Asamblari prin pene
 Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Capitolul 14 Asamblari prin pene T.14.1. Momentul de torsiune este transmis de la arbore la butuc prin intermediul unei pene paralele (figura 14.1). De care din cotele indicate depinde tensiunea superficiala
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
5. CALCULUL ELEMENTELOR DE CONSTRUCŢII DIN LEMN Ing. Director Executiv Aprocor Licence Sorin Pătraș Membru de onoare Asociația Romwoodhouse
 5. CALCULUL ELEMENTELOR DE CONSTRUCŢII DIN LEMN Ing. Director Executiv Aprocor Licence Sorin Pătraș Membru de onoare Asociația Romwoodhouse 5.1 Generaitati Codu românesc NP005-03, pentru cacuu şi acătuirea
5. CALCULUL ELEMENTELOR DE CONSTRUCŢII DIN LEMN Ing. Director Executiv Aprocor Licence Sorin Pătraș Membru de onoare Asociația Romwoodhouse 5.1 Generaitati Codu românesc NP005-03, pentru cacuu şi acătuirea
Profesor Blaga Mirela-Gabriela DREAPTA
 DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
VII.2. PROBLEME REZOLVATE
 Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
Teoria Circuitelor Electrice Aplicaţii V PROBEME REOVATE R7 În circuitul din fiura 7R se cunosc: R e t 0 sint [V] C C t 0 sint [A] Se cer: a rezolvarea circuitului cu metoda teoremelor Kirchhoff; rezolvarea
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
5.5. REZOLVAREA CIRCUITELOR CU TRANZISTOARE BIPOLARE
 5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
V O. = v I v stabilizator
 Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
Stabilizatoare de tensiune continuă Un stabilizator de tensiune este un circuit electronic care păstrează (aproape) constantă tensiunea de ieșire la variaţia între anumite limite a tensiunii de intrare,
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
SOLICITAREA DE TRACŢIUNE COMPRESIUNE
 CPITOLUL 4 SOLICITRE DE TRCŢIUE COMPRESIUE 4.1. Forţe axiale Dacă asupra unei bare drepte se aplică forţe dirijate în lungul axei longitudinale bara este solicitată la tracţiune (Fig.4.1.a) sau la compresiune
CPITOLUL 4 SOLICITRE DE TRCŢIUE COMPRESIUE 4.1. Forţe axiale Dacă asupra unei bare drepte se aplică forţe dirijate în lungul axei longitudinale bara este solicitată la tracţiune (Fig.4.1.a) sau la compresiune
Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane
 Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Lucrul mecanic şi energia mecanică.
 ucrul mecanic şi energia mecanică. Valerica Baban UMC //05 Valerica Baban UMC ucrul mecanic Presupunem că avem o forţă care pune în mişcare un cărucior şi îl deplasează pe o distanţă d. ucrul mecanic al
ucrul mecanic şi energia mecanică. Valerica Baban UMC //05 Valerica Baban UMC ucrul mecanic Presupunem că avem o forţă care pune în mişcare un cărucior şi îl deplasează pe o distanţă d. ucrul mecanic al
Geometrie computationala 2. Preliminarii geometrice
 Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
Platformă de e-learning și curriculă e-content pentru învățământul superior tehnic Geometrie computationala 2. Preliminarii geometrice Preliminarii geometrice Spatiu Euclidean: E d Spatiu de d-tupluri,
Algebra si Geometrie Seminar 9
 Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
MARCAREA REZISTOARELOR
 1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
1.2. MARCAREA REZISTOARELOR 1.2.1 MARCARE DIRECTĂ PRIN COD ALFANUMERIC. Acest cod este format din una sau mai multe cifre şi o literă. Litera poate fi plasată după grupul de cifre (situaţie în care valoarea
Problema a II - a (10 puncte) Diferite circuite electrice
 Diferite circuite electrice") Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Olimpiada de Fizică - Etapa pe judeţ 15 ianuarie 211 XI Problema a II - a (1 puncte) Diferite circuite electrice A. Un elev utilizează o sursă de tensiune (1), o cutie cu rezistenţe (2), un întrerupător
Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].
![Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].](/thumbs/72/67648751.jpg "Fig Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36].") Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
Componente şi circuite pasive Fig.3.85. Impedanţa condensatoarelor electrolitice SMD cu Al cu electrolit semiuscat în funcţie de frecvenţă [36]. Fig.3.86. Rezistenţa serie echivalentă pierderilor în funcţie
DETERMINAREA LUNGIMII DE UNDĂ CU AJUTORUL BIPRISMEI FRESNEL
 LUCRAREA NR. 8 DETERMINAREA LUNGIMII DE UNDĂ CU AJUTORUL BIPRISMEI FRESNEL Tema ucrării: ) Determinarea interfranjei ) Determinarea ungimii de undă a unor radiaţii din spectru mercuruui Aparate: Biprisma
LUCRAREA NR. 8 DETERMINAREA LUNGIMII DE UNDĂ CU AJUTORUL BIPRISMEI FRESNEL Tema ucrării: ) Determinarea interfranjei ) Determinarea ungimii de undă a unor radiaţii din spectru mercuruui Aparate: Biprisma
Conice - Câteva proprietǎţi elementare
 Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Exemple de probleme rezolvate pentru cursurile DEEA Tranzistoare bipolare cu joncţiuni
 Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
Problema 1. Se dă circuitul de mai jos pentru care se cunosc: VCC10[V], 470[kΩ], RC2,7[kΩ]. Tranzistorul bipolar cu joncţiuni (TBJ) este de tipul BC170 şi are parametrii β100 şi VBE0,6[V]. 1. să se determine
1. PROPRIETĂȚILE FLUIDELOR
 1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
1. PROPRIETĂȚILE FLUIDELOR a) Să se exprime densitatea apei ρ = 1000 kg/m 3 în g/cm 3. g/cm 3. b) tiind că densitatea glicerinei la 20 C este 1258 kg/m 3 să se exprime în c) Să se exprime în kg/m 3 densitatea
 4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
4. CIRCUITE LOGICE ELEMENTRE 4.. CIRCUITE LOGICE CU COMPONENTE DISCRETE 4.. PORŢI LOGICE ELEMENTRE CU COMPONENTE PSIVE Componente electronice pasive sunt componente care nu au capacitatea de a amplifica
Capitolul 4. Integrale improprii Integrale cu limite de integrare infinite
 Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
5.4. MULTIPLEXOARE A 0 A 1 A 2
 5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
5.4. MULTIPLEXOARE Multiplexoarele (MUX) sunt circuite logice combinaţionale cu m intrări şi o singură ieşire, care permit transferul datelor de la una din intrări spre ieşirea unică. Selecţia intrării
Ovidiu Gabriel Avădănei, Florin Mihai Tufescu,
 vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
vidiu Gabriel Avădănei, Florin Mihai Tufescu, Capitolul 6 Amplificatoare operaţionale 58. Să se calculeze coeficientul de amplificare în tensiune pentru amplficatorul inversor din fig.58, pentru care se
a. Caracteristicile mecanice a motorului de c.c. cu excitaţie independentă (sau derivaţie)
") Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
Caracteristica mecanică defineşte dependenţa n=f(m) în condiţiile I e =ct., U=ct. Pentru determinarea ei vom defini, mai întâi caracteristicile: 1. de sarcină, numită şi caracteristica externă a motorului
IV. CUADRIPOLI SI FILTRE ELECTRICE CAP. 13. CUADRIPOLI ELECTRICI
 V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
V. POL S FLTE ELETE P. 3. POL ELET reviar a) Forma fundamentala a ecuatiilor cuadripolilor si parametrii fundamentali: Prima forma fundamentala: doua forma fundamentala: b) Parametrii fundamentali au urmatoarele
riptografie şi Securitate
 riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
riptografie şi Securitate - Prelegerea 12 - Scheme de criptare CCA sigure Adela Georgescu, Ruxandra F. Olimid Facultatea de Matematică şi Informatică Universitatea din Bucureşti Cuprins 1. Schemă de criptare
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
1.7. AMPLIFICATOARE DE PUTERE ÎN CLASA A ŞI AB
 1.7. AMLFCATOARE DE UTERE ÎN CLASA A Ş AB 1.7.1 Amplificatoare în clasa A La amplificatoarele din clasa A, forma de undă a tensiunii de ieşire este aceeaşi ca a tensiunii de intrare, deci întreg semnalul
1.7. AMLFCATOARE DE UTERE ÎN CLASA A Ş AB 1.7.1 Amplificatoare în clasa A La amplificatoarele din clasa A, forma de undă a tensiunii de ieşire este aceeaşi ca a tensiunii de intrare, deci întreg semnalul
Tabelul 1- procese fizice fundamentale si operatii unitare. Separarea sistemelor. etetogene gazoase. Operatii hidrodinamice Separarea sistemelor
 Introducere Un proces tehnoogic presupune eecutarea unor opreatii care se pot desfasura succesi, parae sau cicic. Operatia este o faza distincta a unui proces tehnoogic. Operatiie din tehnoogiie de preucrare
Introducere Un proces tehnoogic presupune eecutarea unor opreatii care se pot desfasura succesi, parae sau cicic. Operatia este o faza distincta a unui proces tehnoogic. Operatiie din tehnoogiie de preucrare
Cuprins. Prefaţă 1 Cuprins 3 1. Modelarea corpurilor deformabile 7
 Prefaţă Lucrarea repreintă cursul de Reistenţa materialelor care se predă studenţilor anului II al facultăţii de Inginerie Mecanică la Universitatea Politehnica Bucureşti. În ediţia de faţă partea teoretică
Prefaţă Lucrarea repreintă cursul de Reistenţa materialelor care se predă studenţilor anului II al facultăţii de Inginerie Mecanică la Universitatea Politehnica Bucureşti. În ediţia de faţă partea teoretică
Functii Breviar teoretic 8 ianuarie ianuarie 2011
 Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
SERII NUMERICE. Definiţia 3.1. Fie (a n ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0
 n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0") SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
Tranzistoare bipolare şi cu efect de câmp
 apitolul 3 apitolul 3 26. Pentru circuitul de polarizare din fig. 26 se cunosc: = 5, = 5, = 2KΩ, = 5KΩ, iar pentru tranzistor se cunosc următorii parametrii: β = 200, 0 = 0, μa, = 0,6. a) ă se determine
apitolul 3 apitolul 3 26. Pentru circuitul de polarizare din fig. 26 se cunosc: = 5, = 5, = 2KΩ, = 5KΩ, iar pentru tranzistor se cunosc următorii parametrii: β = 200, 0 = 0, μa, = 0,6. a) ă se determine
Vectori liberi Produs scalar Produs vectorial Produsul mixt. 1 Vectori liberi. 2 Produs scalar. 3 Produs vectorial. 4 Produsul mixt.
 liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
Seminar 5 Analiza stabilității sistemelor liniare
 Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Asupra unei inegalităţi date la barajul OBMJ 2006
 Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25
 Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Capitolul ASAMBLAREA LAGĂRELOR LECŢIA 25 LAGĂRELE CU ALUNECARE!" 25.1.Caracteristici.Părţi componente.materiale.!" 25.2.Funcţionarea lagărelor cu alunecare.! 25.1.Caracteristici.Părţi componente.materiale.
Curs 2 DIODE. CIRCUITE DR
 Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
Curs 2 OE. CRCUTE R E CUPRN tructură. imbol Relația curent-tensiune Regimuri de funcționare Punct static de funcționare Parametrii diodei Modelul cu cădere de tensiune constantă Analiza circuitelor cu
Concurs MATE-INFO UBB, 1 aprilie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
7. Fie ABCD un patrulater inscriptibil. Un cerc care trece prin A şi B intersectează
 TEMĂ 1 1. În triunghiul ABC, fie D (BC) astfel încât AB + BD = AC + CD. Demonstraţi că dacă punctele B, C şi centrele de greutate ale triunghiurilor ABD şi ACD sunt conciclice, atunci AB = AC. India 2014
TEMĂ 1 1. În triunghiul ABC, fie D (BC) astfel încât AB + BD = AC + CD. Demonstraţi că dacă punctele B, C şi centrele de greutate ale triunghiurilor ABD şi ACD sunt conciclice, atunci AB = AC. India 2014
GEOMETRIE PLANĂ TEOREME IMPORTANTE ARII. bh lh 2. abc. abc. formula înălţimii
 GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
8 Intervale de încredere
 8 Intervale de încredere În cursul anterior am determinat diverse estimări ˆ ale parametrului necunoscut al densităţii unei populaţii, folosind o selecţie 1 a acestei populaţii. În practică, valoarea calculată
8 Intervale de încredere În cursul anterior am determinat diverse estimări ˆ ale parametrului necunoscut al densităţii unei populaţii, folosind o selecţie 1 a acestei populaţii. În practică, valoarea calculată
Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune. Huţanu Radu, Axinte Constantin Irimescu Luminita
 Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune Huţanu Radu, Axinte Constantin Irimescu Luminita 1. Generalităţi Există mai multe metode pentru a determina
Determinarea momentului de inerţie prin metoda oscilaţiei şi cu ajutorul pendulului de torsiune Huţanu Radu, Axinte Constantin Irimescu Luminita 1. Generalităţi Există mai multe metode pentru a determina
CURS MECANICA CONSTRUCŢIILOR
 CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
5.1. Noţiuni introductive
 ursul 13 aitolul 5. Soluţii 5.1. oţiuni introductive Soluţiile = aestecuri oogene de două sau ai ulte substanţe / coonente, ale căror articule nu se ot seara rin filtrare sau centrifugare. oonente: - Mediul
ursul 13 aitolul 5. Soluţii 5.1. oţiuni introductive Soluţiile = aestecuri oogene de două sau ai ulte substanţe / coonente, ale căror articule nu se ot seara rin filtrare sau centrifugare. oonente: - Mediul
Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III-
 Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III- 3.4. Criterii de plasticitate Criteriile de plasticitate au apărut din necesitatea de a stabili care sunt factorii de care depinde trecerea
Capitolul 3 NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR - III- 3.4. Criterii de plasticitate Criteriile de plasticitate au apărut din necesitatea de a stabili care sunt factorii de care depinde trecerea
Descriere CIP a Bibliotecii Naționale a României SOFONEA, GALAFTION Rezistența materialelor /
 Galaftion SOFONEA Adrian Marius PASCU REZISTENȚA MATERIAEOR Universitatea ucian Blaga din Sibiu 007 Copyright 007 Toate drepturile asupra acestei lucrări sunt reervate autorilor. Reproducerea integrală
Galaftion SOFONEA Adrian Marius PASCU REZISTENȚA MATERIAEOR Universitatea ucian Blaga din Sibiu 007 Copyright 007 Toate drepturile asupra acestei lucrări sunt reervate autorilor. Reproducerea integrală
FORŢE INTERIOARE. EFORTURI. DIAGRAME DE EFORTURI.
 2.1.Metoda secţiunilor CAPITOLUL 2 FORŢE INTERIOARE. EFORTURI. DIAGRAME DE EFORTURI. În orice corp solid există forţe interioare, de structură, care asigură păstrarea formei şi dimensiunilor corpului.
2.1.Metoda secţiunilor CAPITOLUL 2 FORŢE INTERIOARE. EFORTURI. DIAGRAME DE EFORTURI. În orice corp solid există forţe interioare, de structură, care asigură păstrarea formei şi dimensiunilor corpului.
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
Lucian Maticiuc SEMINAR Conf. dr. Lucian Maticiuc. Capitolul VI. Integrala triplă. Teoria:
 Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
Capitolul I: Integrala triplă Conf. dr. Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Analiza Matematică II, Semestrul II Conf. dr. Lucian MATICIUC Teoria: SEMINAR 3 Capitolul I. Integrala
4. Măsurarea tensiunilor şi a curenţilor electrici. Voltmetre electronice analogice
 4. Măsurarea tensiunilor şi a curenţilor electrici oltmetre electronice analogice oltmetre de curent continuu Ampl.c.c. x FTJ Protectie Atenuator calibrat Atenuatorul calibrat divizor rezistiv R in const.
4. Măsurarea tensiunilor şi a curenţilor electrici oltmetre electronice analogice oltmetre de curent continuu Ampl.c.c. x FTJ Protectie Atenuator calibrat Atenuatorul calibrat divizor rezistiv R in const.
Capitolul 30. Transmisii prin lant
 Capitolul 30 Transmisii prin lant T.30.1. Sa se precizeze domeniile de utilizare a transmisiilor prin lant. T.30.2. Sa se precizeze avantajele si dezavantajele transmisiilor prin lant. T.30.3. Realizati
Capitolul 30 Transmisii prin lant T.30.1. Sa se precizeze domeniile de utilizare a transmisiilor prin lant. T.30.2. Sa se precizeze avantajele si dezavantajele transmisiilor prin lant. T.30.3. Realizati
Principiul Inductiei Matematice.
 Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
Ecuatii trigonometrice
 Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
CURS XI XII SINTEZĂ. 1 Algebra vectorială a vectorilor liberi
 Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
CUPRINS 9. Echilibrul sistemelor de corpuri rigide... 1 Cuprins..1
 CURS 9 ECHILIBRUL SISTEMELOR DE CORPURI RIGIDE CUPRINS 9. Echilibrul sistemelor de corpuri rigide........... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 9.1. Generalităţi. Legături intermediare...2
CURS 9 ECHILIBRUL SISTEMELOR DE CORPURI RIGIDE CUPRINS 9. Echilibrul sistemelor de corpuri rigide........... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 9.1. Generalităţi. Legături intermediare...2
Capitolul 1. Noțiuni Generale. 1.1 Definiții
 Capitolul 1 Noțiuni Generale 1.1 Definiții Forța este acțiunea asupra unui corp care produce accelerația acestuia cu condiția ca asupra corpului să nu acționeze şi alte forțe de sens contrar primeia. Forța
Capitolul 1 Noțiuni Generale 1.1 Definiții Forța este acțiunea asupra unui corp care produce accelerația acestuia cu condiția ca asupra corpului să nu acționeze şi alte forțe de sens contrar primeia. Forța
z a + c 0 + c 1 (z a)
") 1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
Esalonul Redus pe Linii (ERL). Subspatii.
. Subspatii.") Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Spatii liniare. Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară. Mulţime infinită liniar independentă
 liniară. Mulţime infinită liniar independentă") Noţiunea de spaţiu liniar 1 Noţiunea de spaţiu liniar Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară 2 Mulţime infinită liniar independentă 3 Schimbarea coordonatelor unui vector la o schimbare
Noţiunea de spaţiu liniar 1 Noţiunea de spaţiu liniar Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară 2 Mulţime infinită liniar independentă 3 Schimbarea coordonatelor unui vector la o schimbare