ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB)
|
|
|
- Αγρίππας Κόρακας
- 6 χρόνια πριν
- Προβολές:
Transcript

1 ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) ΤΕΙ Α.Μ.Θ. ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΘΗΓΗΤΗΣ ΤΣΙΡΙΓΩΤΗΣ ΓΕΩΡΓΙΟΣ ΚΑΒΑΛΑ 013

2 ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) 1.1 ΕΞΟΜΟΙΩΣΗ ΑΝΑΛΟΓΙΚΩΝ Σ.Α.Ε 1. Εισαγωγή στο Simulink Το MATLAB είναι ένα μαθηματικό λογισμικό, της εταιρείας Mathworks Inc, που μεταξύ των άλλων, μας παρέχει και την δυνατότητα πραγματοποίησης εξομοιώσεων στα Συστήματα Αυτομάτου Ελέγχου (ΣΑΕ), με το εργαλείο Simulink που διαθέτει. Έτσι γίνεται πλέον δυνατή, η αντικατάσταση του αναλογικού υπολογιστή από τον ψηφιακό (PC), σ ότι αφορά την εξομοίωση και την μελέτη των γραμμικών, αναλογικών ΣΑΕ. Το Simulink μας παρέχει όμως δυνατότητες μελέτης και εξομοίωσης και για άλλα είδη συστημάτων (πολυμεταβλητών, ψηφιακών, μή γραμμικών κ.λ.π.). Με την έναρξη του MATLAB, η οθόνη εργασίας που εμφανίζεται είναι αυτή που έχουμε στο Σχήμα Για να περάσουμε στην οθόνη εργασίας του Simulink, αρκεί να το καλέσουμε γράφοντάς το στην οθόνη. Σχήμα 1. 1 Η οθόνη εργασίας του MATLAB Η οθόνη εργασίας του Simulink που εμφανίζεται (Σχήμα 1. ), εμφανίζει συγχρόνως και την γενική βιβλιοθήκη του Simulink (Σχήμα 1. 3), η οποία έχει τις υποβιβλιοθήκες: Sources: Περιέχει εργαλεία δημιουργίας σημάτων (Σχήμα 1. 4). Sinks: Περιέχει εργαλεία απεικόνισης (παλμογράφους, καταγραφικά, κ.λ.π.) (Σχήμα 1. 4). Linear: Περιέχει εργαλεία κατασκευής Συναρτήσεων Μεταφοράς αναλογικής μορφής (Σχήμα 1. 5). Discrete: Περιέχει εργαλεία κατασκευής Συναρτήσεων Μεταφοράς ψηφιακής μορφής (Σχήμα 1. 5). Nonlinear: Περιέχει εργαλεία κατασκευής μή γραμμικών ΣΑΕ (Σχήμα 1. 6). Connections: Περιέχει εργαλεία σύνδεσης και μεταφοράς δεδομένων (Σχήμα 1. 6). SIMULINK
. Σχήμα 1. Η οθόνη εργασίας του Simulink Σχήμα 1.")

3 Block sets & Toolboxes: Περιέχει σύνθετες εργασίες και εφαρμογές (Σχήμα 1. 7). Demos: Περιέχει όλες της εφαρμογές demos του MATLAB (Σχήμα 1. 8). Σχήμα 1. Η οθόνη εργασίας του Simulink Σχήμα 1. 3 Η γενική βιβλιοθήκη του Simulink Προσοχή Ενδεχομένως (ανάλογα με την έκδοση του Matlab που χρησιμοποιείτε) να σχήματα των στοιχείων στις βιβλιοθήκες να είναι διαφορετικά. Επίσης, οι νεώτερες εκδόσεις εμπεριέχουν περισσότερα στοιχεία και έχουν περισσότερες δυνατότητες. SIMULINK 3
4 Σχήμα 1. 4 Βιβλιοθήκες Sources και Sinks Σχήμα 1. 5 Βιβλιοθήκες Linear και Discrete SIMULINK 4

5 Σχήμα 1. 6 Βιβλιοθήκες Nonlinear και Connections Σχήμα 1. 7 Βιβλιοθήκη Blocksets and Toolboxes SIMULINK 5
.")
6 Σχήμα 1. 8 Βιβλιοθήκη Demos Με τα εργαλεία που έχουν οι υποβιβλιοθήκες μπορούμε στην συνέχεια να εξομοιώσουμε τα συστήματα. Για να φέρουμε ένα εργαλείο από μία βιβλιοθήκη του Simulink, αρκεί να το επιλέξουμε με το ποντίκι και στην συνέχεια να το σύρουμε στην επιφάνεια εργασίας (Σχήμα 1. 9). Στην περίπτωση του σχήματος η επιφάνεια εργασίας είναι χωρίς όνομα (untitled). Αποθηκεύοντάς την, μπορούμε να την ονοματίσουμε. Κάνοντας διπλό κλικ πάνω σ ένα εργαλείο της επιφάνειας εργασίας, μπορούμε να ορίσουμε τις παραμέτρους του εργαλείου, πάνω στο παράθυρο διαλόγου που εμφανίζεται (Σχήμα 1. 10, Σχήμα 1. 11), ή ακόμα να τις αλλάζουμε κάθε φορά που το επιθυμούμε. Εάν έχουμε ένα εργαλείο στην επιφάνεια εργασίας, μπορούμε να το αντιγράψουμε στην ίδια ή σε άλλη επιφάνεια εργασίας, με την γνωστή διαδικασία copy και paste. SIMULINK 6


7 Σχήμα 1. 9 Μεταφορά εργαλείου από μία βιβλιοθήκη στην επιφάνεια εργασίας Σχήμα Ορισμός μεταβλητών εργαλείου SIMULINK 7
 του συστήματος που")

8 Σχήμα Ορισμός μεταβλητών εργαλείου Στο Σχήμα 1. 1 φαίνεται ο τρόπος με τον οποίο μπορούμε να κάνουμε την εξομοίωση (simulation) του συστήματος που πραγματοποιήσαμε και να πάρουμε την απεικόνιση του σήματος με την βοήθεια του εργαλείου Scope. Η εξομοίωση μπορεί να αρχίσει ή να σταματήσει και με το πάτημα των κουμπιών αντίστοιχα. Σχήμα 1. 1 Εξομοίωση (Simulation) και απεικόνιση του σήματος SIMULINK 8
9 Στην περίπτωση που θέλουμε να απεικονίσουμε πολλά σήματα συγχρόνως, πρέπει να χρησιμοποιήσουμε έναν πολυπλέκτη (Mux) (Σχήμα 1. 13) Σχήμα Σχήμα Περίπτωση απεικόνισης πολλών σημάτων SIMULINK 9
10 1.3 Άσκηση 1 η : Παραγωγή χρονικών συναρτήσεων Συνάρτηση ημιτόνου-συνημιτόνου Έστω ότι θέλουμε να παράγουμε την συνάρτηση: Ft A cos t. Οι αρχικές συνθήκες της, για t=0, θα είναι: F0 A cos0 A Η παράγωγός της θα είναι: dft Asint dt της οποίας η αρχική συνθήκη, για t=0, θα είναι: 0 df Asin dt Παραγωγίζοντας ακόμα μια φορά θα έχουμε: t 0 0 d F A cos t Ft dt d Ft Ft dt Η διαφορική αυτή εξίσωση, μπορεί να εξομοιωθεί σύμφωνα με το Σχήμα Α F(t) -1 Σχήμα Εξομοίωση της διαφορικής εξίσωσης του συνημιτόνου Η εξομοίωσή της δε στο Simulink, και για (Α=3 και ω=1 rad/sec) θα είναι όπως φαίνεται στο Σχήμα Οι αρχικές συνθήκες σε κάθε ολοκληρωτή τοποθετούνται εσωτερικά, με διπλό κλικ πάνω στο σχήμα του. SIMULINK 10
11 Σχήμα Εξομοίωση της διαφορικής εξίσωσης του συνημιτόνου στο Simulink Η έξοδος της εξομοίωσης είναι όπως φαίνεται στο Σχήμα όπου βλέπουμε ότι πρόκειται για ένα συνημίτονο και μπορούμε να επαληθεύσουμε και τα μεγέθη Α και ω. Σχήμα Το σήμα στην έξοδο της εξομοίωσης Από την απόκριση του συστήματος υπολογίστε τα μεγέθη Α και ω. Επαναλάβετε την διαδικασία για διάφορες τιμές των σταθερών Α και ω: (Α=- ω=0,5 rad/sec), (Α=5 ω=4 rad/sec) και (Α=-5 ω=0, rad/sec). 1 Να παράγετε την ίδια συνάρτηση με την χρήση των εργαλείων: Step, Gain, Transfer Fcn, Scope. 1 Στις εργασίες που θα παραδίδετε, θα φαίνονται οι μετρήσεις και οι υπολογισμοί που σας ζητούνται, πάνω στις καταγραφές που παίρνετε. SIMULINK 11
12 1.3. Εκθετική Συνάρτηση F(t)=Ae -at Έστω ότι θέλουμε να εξομοιώσουμε την συνάρτηση: Η αρχική της συνθήκη θα είναι: Παραγωγίζοντας την F(t) θα έχουμε: Α df dt t F F 0 t A e A e 0 t A 1 t 1 A e F dft 1 Ft dt t -1 Σχήμα Εξομοίωση της διαφορικής εξίσωσης της εκθετικής συνάρτησης Η διαφορική αυτή εξίσωση, μπορεί να εξομοιωθεί σύμφωνα με το Σχήμα 1. 17, στο δε Simulink και για (Α=3 και τ=1 sec) θα είναι όπως φαίνεται στο Σχήμα Σχήμα Εξομοίωση της διαφορικής εξίσωσης στο Simulink SIMULINK 1
13 Η έξοδος θα είναι αυτή του Σχήμα Στο εν λόγω σχήμα φαίνεται η εκθετική συνάρτηση και μπορούμε να επαληθεύσουμε τα μεγέθη Α και τ. Σχήμα Η έξοδος της εξομοίωσης Από την απόκριση του συστήματος υπολογίστε τα μεγέθη Α και τ. Επαναλάβετε την διαδικασία για διάφορες τιμές των σταθερών Α και τ: (Α=- τ=0,5 sec), (Α=5 τ=4 sec) και (Α=-5 τ=0, sec). SIMULINK 13
14 1.4 Άσκηση η : Εξομοίωση συναρτήσεων Στάθμη υγρού σε δοχείο Σύμφωνα με την ανάλυση που προηγήθηκε στο θεωρητικό μάθημα, το δοχείο του σχήματος: q 1 (t) A 1 όπου: R 1 = έχει διάσταση ενίσχυσης τ 1 =Α 1 R 1 =σταθερά χρόνου h 1 (t) C 1 q (t) R 1 Σχήμα 1. 0 Στάθμη υγρού σε δοχείο Θα έχει Συνάρτηση Μεταφοράς: H Q 1 s s 1 R1 1 s 1 Για R1=4, A1=,5 και τ1=10 sec και ενώ το σύστημα βρίσκεται σε κατάσταση ισορροπίας, αφού του έχουμε εφαρμόσει μια σταθερή είσοδο, π.χ. (δηλαδή έχουμε ροή εισόδου=ροή εξόδου και στάθμη σταθερή), εφαρμόζουμε εκ νέου μια βηματική είσοδο q1(t) =8, δώστε την μορφή της εξέλιξης που θα έχει η στάθμη h1(t) του υγρού στο δοχείο καθώς και οι ροές εισόδου και εξόδου q1(t) και q(t) αντίστοιχα. SIMULINK 14
15 1.4. Στάθμη υγρού σε δοχεία εν σειρά Πραγματοποιείστε την εξομοίωση για τα δύο δοχεία του σχήματος που ακολουθεί: q 1 (t) A 1 h 1 (t) C 1 q (t) R 1 A h (t) C q 3 (t) R Σχήμα 1. 1 Στάθμη υγρού σε δοχεία εν σειρά Για R1=4, A1=,5, τ1=10 sec και R=6, A=3,33, τ=0 sec και ενώ το σύστημα βρίσκεται σε κατάσταση ισορροπίας, αφού του έχουμε εφαρμόσει μια σταθερή είσοδο, π.χ. (δηλαδή έχουμε ροή εισόδου=ροή εξόδου και στάθμη σταθερή), εφαρμόζουμε εκ νέου μια βηματική είσοδο q1(t) =8, δώστε την μορφή της εξέλιξης που θα έχουν οι στάθμες h1(t), h(t) του υγρού στα δοχεία καθώς και οι ροές εισόδου και εξόδου q1(t), q(t) και q3(t) αντίστοιχα. Η Συνολική Συνάρτηση Μεταφοράς θα είναι: H (s) Q 1 (s) = τ 1 s R 1 + τ 1 s = R τ 1 τ s + (τ 1 + τ )s + 1 Q 3 (s) = H (s) R SIMULINK 15
16 1.4.3 Στάθμη υγρού σε συγκοινωνούντα δοχεία Πραγματοποιείστε την εξομοίωση για τα δύο δοχεία του σχήματος που ακολουθεί: q 1 (t) h 1 (t) A 1 q (t) A C 1 C h (t) q 3 (t) R 1 R Σχήμα 1. Στάθμη υγρού σε συγκοινωνούντα δοχεία R 1 Q (s) = H 1 (s) H (s) Q (s) = H 1(s) H (s) R 1 Q 1 (s) Q (s) = A 1 sh 1 (s) Q 1 (s) = A 1 sh 1 (s) + Q (s) R Q 3 (s) = H (s) Q (s) Q 3 (s) = A sh (s) Q (s) = A sh (s) + Q 3 (s) Για R1=4, A1=,5, τ1=10 sec και R=6, A=3,33, τ=0 sec και ενώ το σύστημα βρίσκεται σε κατάσταση ισορροπίας, αφού του έχουμε εφαρμόσει μια σταθερή είσοδο, π.χ. (δηλαδή έχουμε ροή εισόδου=ροή εξόδου και στάθμη σταθερή), εφαρμόζουμε εκ νέου μια βηματική είσοδο q1(t) =8, δώστε την μορφή της εξέλιξης που θα έχουν οι στάθμες h1(t), h(t) του υγρού στα δοχεία καθώς και οι ροές εισόδου και εξόδου q1(t), q(t) και q3(t) αντίστοιχα. Η συνολική Συνάρτηση Μεταφοράς θα είναι: H (s) Q 1 (s) = R τ 1 τ s + (τ 1 + τ + A 1 R )s + 1 SIMULINK 16
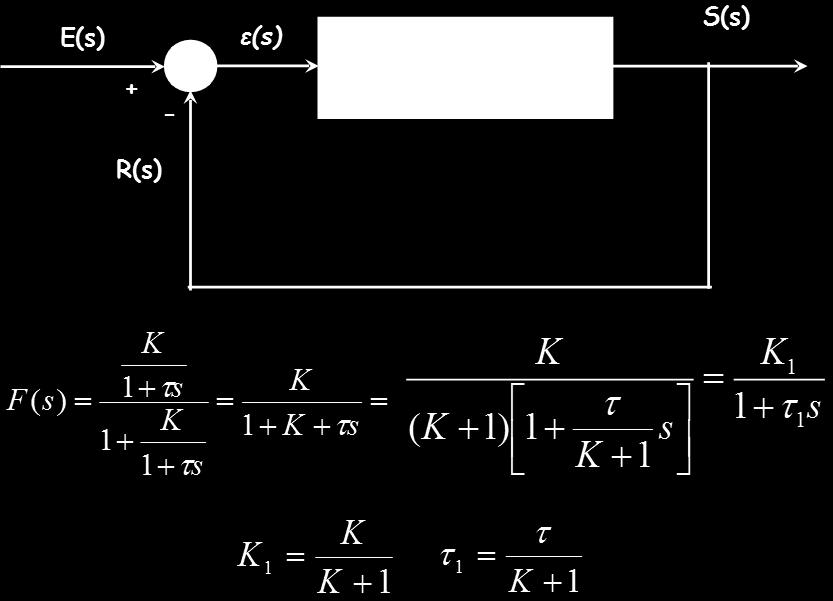
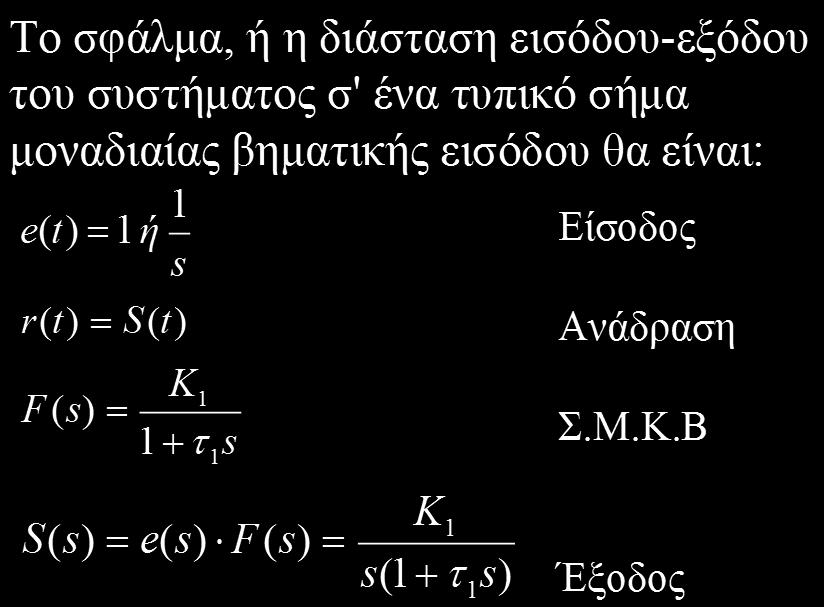
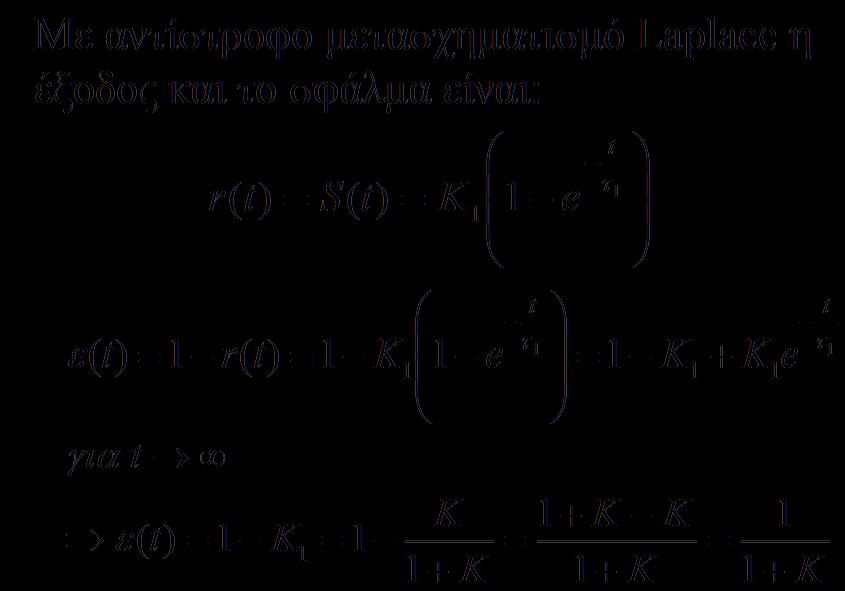
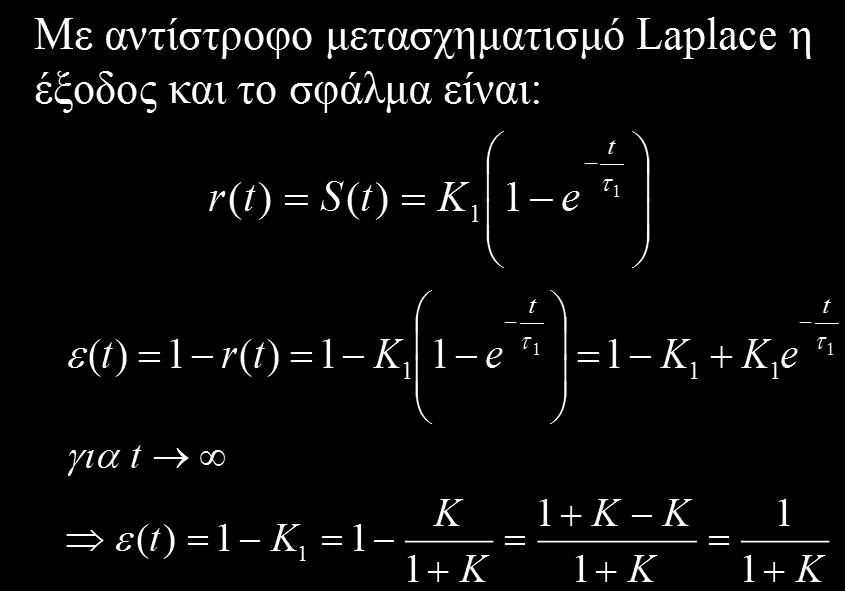
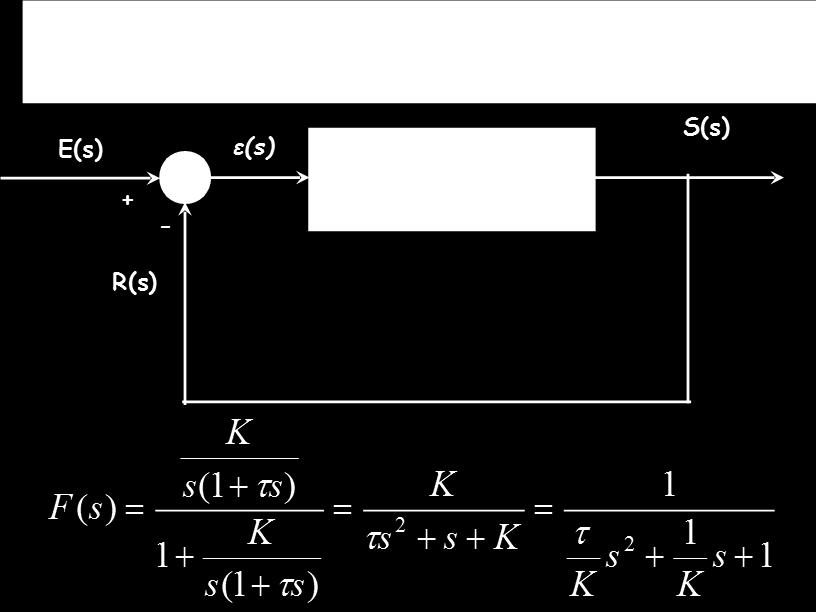
17 1.5 Άσκηση 3 η : Σύστημα 1 ου βαθμού Έστω ότι θέλουμε να εξομοιώσουμε στον υπολογιστή το ΣΑΕ 1 ου βαθμού (Σχήμα 1. 3), για Κ=4 και τ= sec και για βηματική είσοδο. E(s) + - S(s) Σχήμα 1. 3 Σύστημα 1 ου βαθμού Η Συνάρτηση Μεταφοράς κλειστού βρόχου του συστήματος θα είναι: F(s) = S(s) E(s) = T(s) 1 + T(s) = K 1 + τs 1 + K 1 + τs = K 1 + K + τs = K 1 + K 1 + τ 1 + K s = K τ 1 s Δηλαδή η Σ.Μ του κλειστού βρόχου, θα είναι της ίδιας μορφής με αυτήν του ανοιχτού (1 ου βαθμού), αλλά με διαφορετικές τιμές για τις σταθερές (ΚΚ1) και (ττ1). Κάνοντας τον αντίστροφο μετασχηματισμό Laplace και με μηδενικές αρχικές συνθήκες θα έ- χουμε την διαφορική εξίσωση: S(s) E(s) = K τ 1 s S(s) (1 + τ 1s) = K 1 E(s) S(s) + S(s) τ 1 s = K 1 E(s) L 1 [S(s) + S(s) τ 1 s] = L 1 [K 1 E(s)] S(t) + τ 1 ds(t) dt ds(t) dt = K 1 τ 1 E(t) 1 τ 1 S(t) = K 1 E(t) SIMULINK 17
18 Η ανωτέρω διαφορική εξίσωση μπορεί να εξομοιωθεί όπως στο Σχήμα E(t) Κ 1/τ 1 S(t) 1/τ1-1 Σχήμα 1. 4 Εξομοίωση της διαφορικής εξίσωσης του συστήματος 1 ου βαθμού K 4 4 K1 0,8 1 K Οι τιμές των συντελεστών θα είναι: 1 0,4 1 K K1 1,5 1 1 Η εξομοίωση του ΣΑΕ στο Simulink φαίνεται στο Σχήμα Σχήμα 1. 5 Εξομοίωση του ΣΑΕ 1 ου βαθμού στο Simulink SIMULINK 18
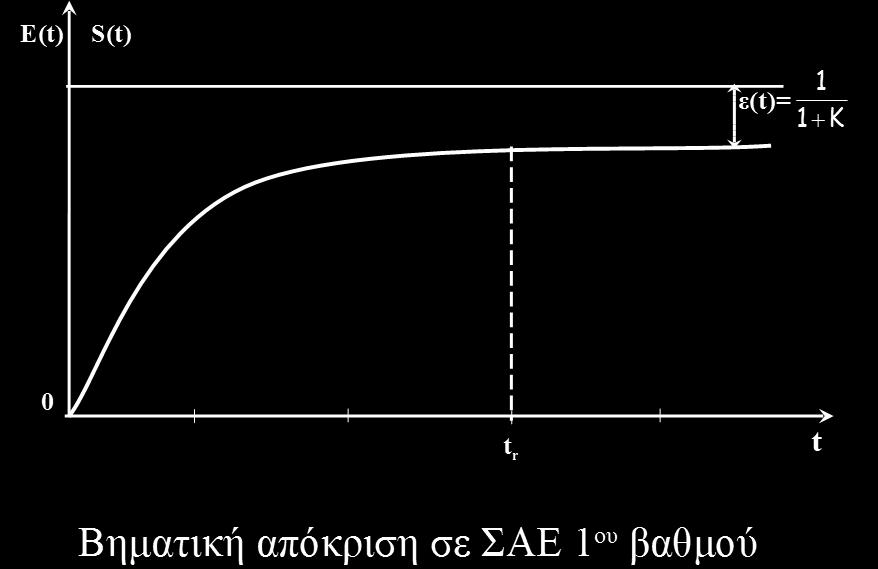
19 H βηματική είσοδος και η έξοδος του συστήματος καταγράφονται στο Σχήμα Σχήμα 1. 6 Βηματική απόκριση του ΣΑΕ Η εξομοίωση του συστήματος μπορεί να πραγματοποιηθεί απλούστερα στο Simulink, χρησιμοποιώντας το εργαλείο της Συνάρτησης Μεταφοράς, κατά το Σχήμα Η απόκριση του συστήματος είναι ακριβώς η ίδια με προηγουμένως. Σχήμα 1. 7 Εξομοίωση με την χρήση της Συνάρτησης Μεταφοράς Από την απόκριση του συστήματος και χρησιμοποιώντας την ανάλυση στο Παράρτημα, υπολογίστε: SIMULINK 19
20 Τα μεγέθη Κ και τ. Το στατικό σφάλμα %. Επαναλάβετε την διαδικασία με τον απλούστερο τρόπο για διάφορες τιμές των σταθερών Κ και τ: (τ= και Κ=, 5, 8, 10), (Κ=4 και τ=1, 5, 8, 10). Για κάθε μία από τις περιπτώσεις υπολογίστε: Τα μεγέθη Κ και τ. Το στατικό σφάλμα %. Ποια κατά την γνώμη σας είναι η επίδραση των μεγεθών Κ και τ στην ποιότητα της απόκρισης του συστήματος; 1.6 Άσκηση 4 η : Σύστημα ου βαθμού Έστω ότι θέλουμε να εξομοιώσουμε στον υπολογιστή το ΣΑΕ ου βαθμού του Σχήμα 1. 8, για Κ=4 και τ= sec και για βηματική είσοδο. E(s) + - S(s) Σχήμα 1. 8 Σύστημα ου βαθμού Η Συνάρτηση Μεταφοράς κλειστού βρόχου του συστήματος θα είναι: K S s Ts s1 s K K 1 F s Es 1 Ts K K s1 s s s K 1 1 s s 1 s1 s K K Δηλαδή η Σ.Μ του κλειστού βρόχου, θα είναι της γνωστής μορφής ου βαθμού με τα μεγέθη ωn (σε rad/sec) και ξ. F s S E s 1 s 1 s s 1 n n όπου: n K 1 K Κάνοντας τον αντίστροφο μετασχηματισμό Laplace και με μηδενικές αρχικές συνθήκες θα έ- χουμε την διαφορική εξίσωση: SIMULINK 0
21 SIMULINK 1 t S dt t ds t E dt t S d t S dt t ds dt t S d t E s S s ss s S s L s E L s s s S s E s s s E s S n n n n n n n n n n n Η ανωτέρω διαφορική εξίσωση μπορεί να εξομοιωθεί όπως στο Σχήμα Σχήμα 1. 9 Εξομοίωση της διαφορικής εξίσωσης του συστήματος ου βαθμού Για Κ=4 και τ=, οι τιμές των συντελεστών ωn και ξ θα είναι: 0,5 0, ,414 4 n n n K K Η εξομοίωση του ΣΑΕ στο Simulink φαίνεται στο Σχήμα S(t) E(t) -1-1
22 Σχήμα Εξομοίωση του ΣΑΕ ου βαθμού με το Simulink Η βηματική απόκριση του συστήματος φαίνεται στο Σχήμα Σχήμα Βηματική απόκριση του ΣΑΕ ου βαθμού SIMULINK
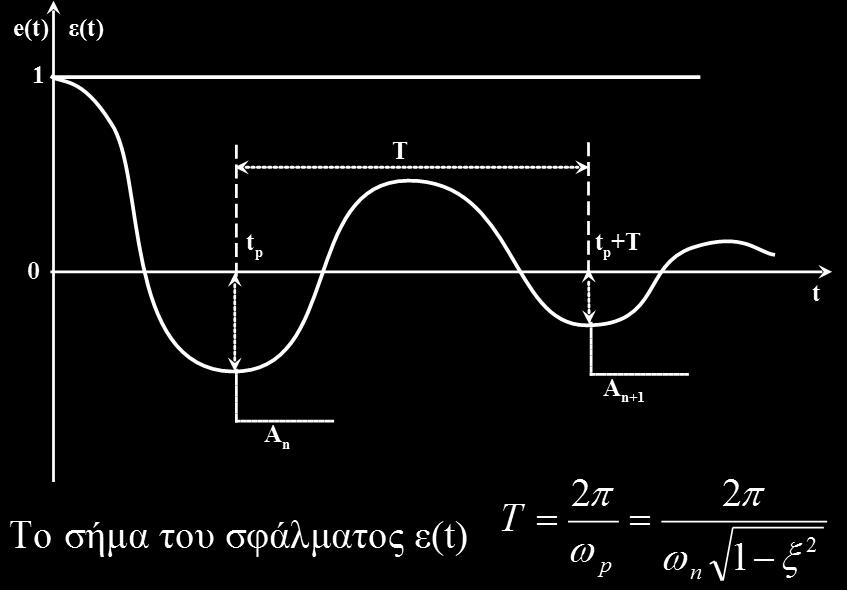
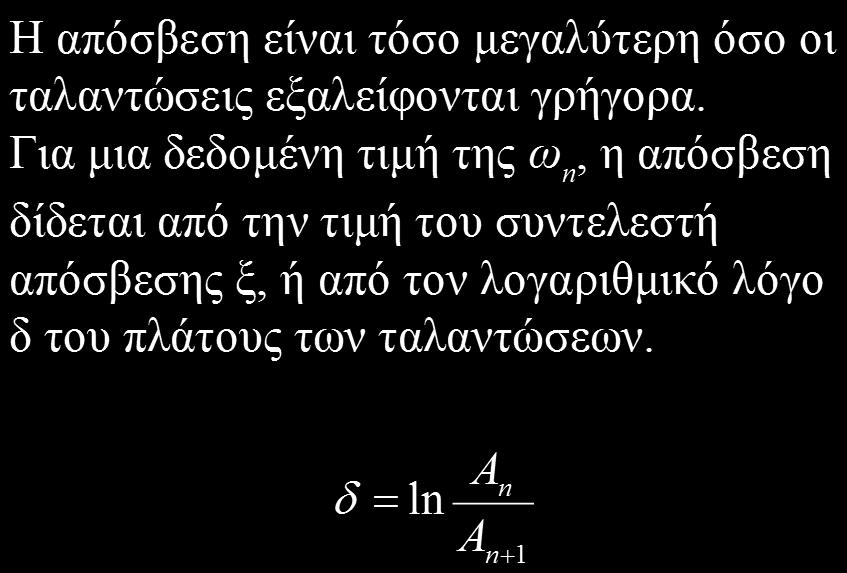
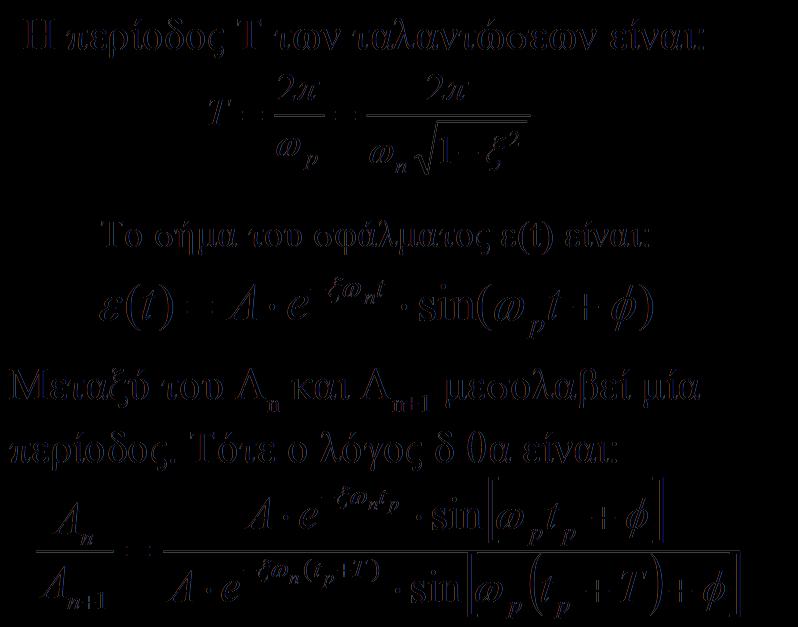
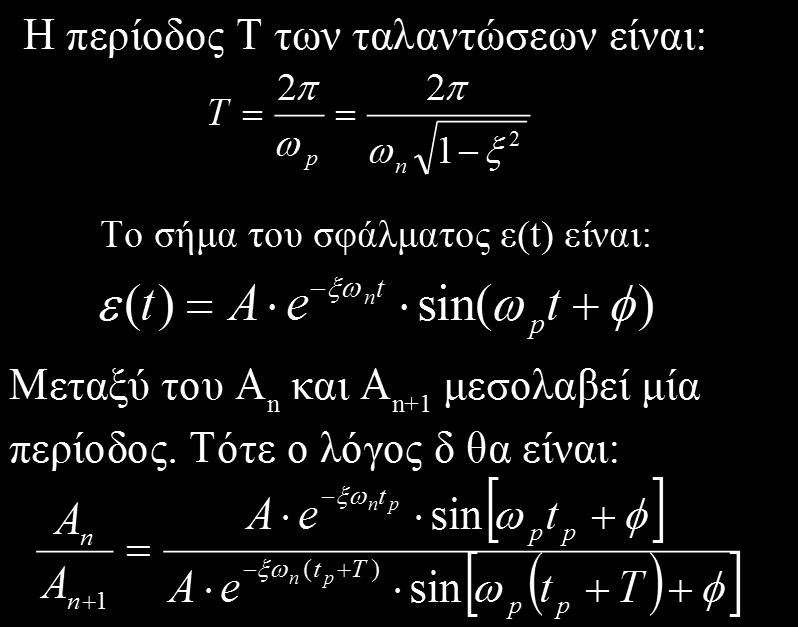
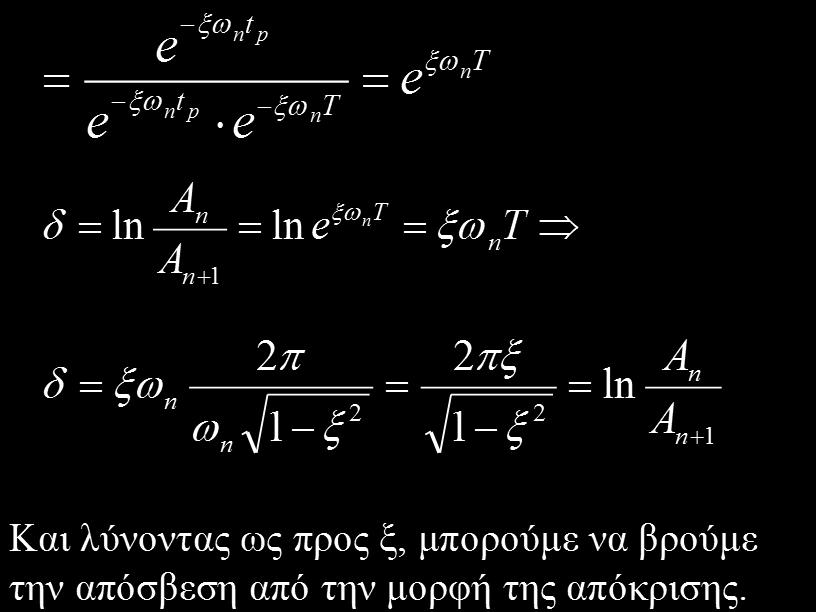
23 Η εξομοίωση του συστήματος, όπως στην περίπτωση του συστήματος 1 ου βαθμού μπορεί να πραγματοποιηθεί απλούστερα στο Simulink, χρησιμοποιώντας το εργαλείο της Συνάρτησης Μεταφοράς, κατά το Σχήμα Η απόκριση του συστήματος είναι ακριβώς η ίδια με προηγουμένως. Σχήμα 1. 3 Εξομοίωση με την χρήση της Συνάρτησης Μεταφοράς Μπορούμε επίσης να πραγματοποιήσουμε την εξομοίωση βάζοντας απ ευθείας την Συνάρτηση Μεταφοράς κλειστού βρόχου του συστήματος, όπως αποτυπώνεται στο Σχήμα 1. 33, α- φού την υπολογίσουμε, σύμφωνα με την σχέση: F s S E s 1 s 1 s s 1 n n Σχήμα Εξομοίωση με την χρήση της Συνάρτησης Μεταφοράς κλειστού βρόχου Από την απόκριση του συστήματος υπολογίστε: Την λογαριθμική απόσβεση δ και τα μεγέθη ωn και ξ. Επαναλάβετε την διαδικασία με τον απλούστερο τρόπο (Σχήμα 1.33) για διάφορες τιμές των σταθερών ωn και ξ : (ωn= και ωn=1 για ξ=0.1, 0., 0.4, 0.7, 1, ). Για κάθε μία από τις περιπτώσεις (ωn=1 και ωn=) χαράξτε συγχρόνως τις αποκρίσεις για κάθε τιμή του ξ. Βρείτε την συχνότητα της ταλάντωσης ωp για κάθε περίπτωση. Για ποια τιμή του ξ κατά την γνώμη σας έχετε την καλύτερη απόκριση; SIMULINK 3
, που βρίσκεται στην βιβλιοθήκη discrete.")
24 ΕΞΟΜΟΙΩΣΗ ΨΗΦΙΑΚΩΝ Σ.Α.Ε.1 Δειγματοληψία μηδενικού βαθμού (Zero Order Hold) Οι δειγματολήπτες είναι απαραίτητες διατάξεις για την μετατροπή ενός σήματος από αναλογικό σε διακριτό (discrete) ή ψηφιακό (digital). Η μαθηματική τους περιγραφή δίδεται στο θεωρητικό μέρος του μαθήματος. Το Simulink έχει έτοιμο εργαλείο ZOH (Σχήμα.1 ), που βρίσκεται στην βιβλιοθήκη discrete. Στον ZOH μπορούμε να ορίσουμε την περίοδο της δειγματοληψίας του. Σχήμα.1 ΖΟΗ Στο Σχήμα. που ακολουθεί, κάνουμε δειγματοληψία ενός ημιτονικού σήματος πλάτους 5 και συχνότητας ω=1 rad/sec. Σχήμα. Δειγματοληψία SIMULINK 4
25 Στο σχήμα που ακολουθεί έχουμε δύο διαφορετικές δειγματοληψίες του αναλογικού ημιτονικού σήματος, με συχνότητες 1 και 5 Hz αντίστοιχα. Σχήμα.3 Δειγματοληψία με 1 και 5 Ηz Όπως είναι ήδη γνωστό, για να έχουμε μία ικανοποιητική δειγματοληψία, πρέπει να τηρείται το θεώρημα του Shannon, δηλαδή η συχνότητα με την οποία κάνουμε δειγματοληψία σε ένα σήμα, θα πρέπει να είναι τουλάχιστον διπλάσια από την συχνότητα της υψηλότερης αρμονικής του σήματος. Σε αντίθετη περίπτωση, έχουμε απώλεια πληροφορίας κατά την μετάβαση από το συνεχές στο δειγματολημένο σήμα. Ένα παρεμφερές πρόβλημα της δειγματοληψίας, είναι αυτό του φαινομένου aliasing που φαίνεται στο Σχήμα.4. Στο εν λόγω σχήμα έχουμε ένα ημιτονικό σήμα συχνότητας 7/8 Hz, στο οποίο κάνουμε δειγματοληψία με συχνότητα 1 Hz. Βλέπουμε ότι το σήμα που προκύπτει είναι ένα η- μιτονικό σήμα συχνότητας 1/8 Hz με διαφορά φάσης 180 ο, δηλαδή εντελώς διαφορετικό από το αρχικό. Για να δούμε το φαινόμενο αυτό, θα πρέπει να δώσουμε και να καταγράψουμε (παράλληλα με τα άλλα σήματα) και το ημιτονικό σήμα συχνότητας 1/8 Hz αντεστραμμένο. Εφιστάται η προσοχή σας στο ότι οι τιμές εδώ δίδονται σε Hz, ενώ στο Simulink πρέπει να εισαχθούν σε ω(rad/sec), ή σε Τ(sec) για την συχνότητα των ημιτονικών σημάτων και για την περίοδο της δειγματοληψίας αντίστοιχα. Για να καταγράφουμε τα σήματα των αποκρίσεων στον παλμογράφο με μεγαλύτερη ακρίβεια, υπάρχει η δυνατότητα ρύθμισης των παραμέτρων καταγραφής. Ο τρόπος της ρύθμισης είναι ελαφρά διαφορετικός (ανάλογα με την έκδοση του Matlab). Για την έκδοση π.χ. R01b, η ρύθμιση γίνεται ως εξής: Simulation Parameters Data Import/Export Save Options Refine Output Refine Factor=10 (αντί για 1 που είναι αρχικά). SIMULINK 5

26 Σχήμα.4 Φαινόμενο aliasing. Άσκηση 1 η : Δειγματοληψία σημάτων με ΖΟΗ. Πραγματοποιήστε τις δειγματοληψίες: Σήμα 4sin10t 4sin10t + sin5t 4sin10t + sin5t + + Repeating sequence [0 ] [- ] Συχνότητα Δειγματοληψίας 0,1 sec 0, sec 0,1 sec.3 Άσκηση η : Δειγματοληψία 1 ου βαθμού (First Order Hold) Εκτός από την δειγματοληψία μηδενικού βαθμού (ΖΟΗ), υπάρχει και η δειγματοληψία 1 ου βαθμού (FOH). Η διαφορά της απ αυτήν του μηδενικού βαθμού, συνίσταται στο ότι η τιμή του δείγματος που λαμβάνουμε, δεν παραμένει σταθερή μέχρι να έλθει το επόμενο, όπως στον ΖΟΗ, αλλά διαφοροποιείται σύμφωνα με την σχέση: f k t f kt f kt f k 1T t kt T όπως φαίνεται και στο Σχήμα.5. Στην συνέχεια των ψηφιακών ΣΑΕ θα χρησιμοποιήσουμε την δειγματοληψία ΖΟΗ. SIMULINK 6
27 Σχήμα.5 Δειγματοληψία 1 ου βαθμού (FOH) Πραγματοποιείστε τις δειγματοληψίες της προηγούμενης άσκησης με FOH..4 Άσκηση 3 η : Δημιουργία ψηφιακής συνάρτησης ημιτόνου Έστω ότι θέλουμε να παράγουμε την ψηφιακή συνάρτηση: Αsin(akT). Με πλάτος 5 volts, συχνότητα σήματος 1 Hz και συχνότητα δειγματοληψίας 100 Hz. Το ημιτονικό ψηφιακό σήμα, στην έξοδο, μετασχηματισμένο κατά z, θα είναι με βάση τους πίνακες (N o 9): sin A z a T Y z α=ω cos z z a T 1 Εάν θεωρήσουμε ότι η είσοδος (διέγερση) είναι μία ψηφιακή βηματική είσοδος (z/(z-1) κατά z), τότε η συνάρτηση μεταφοράς του συστήματος που θα παράγει το ψηφιακό ημιτονικό σήμα, θα είναι έξοδος / είσοδος : A z sinat Y z z z at z z at at z at z H z cos 1 1 sin sin sin A A 3 X z z z z z cosat 1 z cosat z z z 1 έχουμε: f 6,8rad sec T 0,01sec sin at sin 6,8 rad 0,01sec sin 0,068 rad 0, cos 0679 sec at cos 6,8 rad 0,01 sec cos0,068 rad 0, 998 sec άρα η Σ.Μ θα είναι: H z 0,068 z 0,068 z 5 3 z 0,998 z z 0,068 z 0,068 z 5 3 z 1,996 z z Το εξομοιωμένο κύκλωμα φαίνεται στο Σχήμα.6 και το σήμα στο Σχήμα.7. SIMULINK 7
, με πλάτος 4")
28 Σχήμα.6 Κύκλωμα ψηφιακού ημιτόνου Σχήμα.7 Το ψηφιακό ημίτονο Επαναλάβετε την όλη διαδικασία για την παραγωγή του ψηφιακού σήματος: Αcos(akT), με πλάτος 4 volts, συχνότητα σήματος Hz και συχνότητα δειγματοληψίας 50 Hz. SIMULINK 8
29 .5 Άσκηση 4 η : Σύστημα 1 ου βαθμού (μετατροπή σε ψηφιακό) Έστω ότι θέλουμε να μετατρέψουμε σε ψηφιακό (με περίοδο δειγματοληψίας Τ=0.1 sec), το ΣΑΕ 1 ου βαθμού (Σχήμα.8), για Κ=4, α= sec και βηματική είσοδο. E(s) + - S(s) Σχήμα.8 Σύστημα 1 ου βαθμού Η μετατροπή μπορεί να γίνει με δύο τρόπους. Ο πρώτος είναι να παρεμβάλουμε έναν ΖΟΗ μετά τον συγκριτή και έναν ΖΟΗ καθρέφτη στην έξοδο. Ο άλλος τρόπος είναι να βρούμε την Συνάρτηση Μεταφοράς κατά z του απ ευθείας κλάδου (βλέπε θεωρητικό μάθημα). Οι τρεις περιπτώσεις (μαζί με το αναλογικό) φαίνονται στο Σχήμα.9. Στο Σχήμα.10 φαίνονται τα σήματα (είσοδος έξοδοι) για την κάθε περίπτωση και φαίνεται ότι για τους δύο τρόπους ψηφιακής εξομοίωσης οι αποκρίσεις ταυτίζονται. Σχήμα.9 Εξομοίωση του αναλογικού και του ψηφιακού ΣΑΕ 1 ου βαθμού SIMULINK 9
30 Σχήμα.10 Σήματα εισόδου εξόδων Το αναλογικό σύστημα (καθώς πρόκειται για σύστημα 1 ου βαθμού) θα είναι ευσταθές για οποιαδήποτε θετική τιμή του Κ (0< Κ< ). Σ ότι αφορά την ευστάθεια του ψηφιακού συστήματος τα πράγματα είναι διαφορετικά. Η χαρακτηριστική του εξίσωση θα είναι: Q(z)=z+0,0906K-0,8187=0 Εφαρμόζοντας το κριτήριο της ευστάθειας του Jury θα έχουμε ότι το σύστημα περνάει στην α- στάθεια για Κ>0,074. Επαναλάβετε την διαδικασία για Σ.Μ: G s K με Κ=4 και συχνότητα δειγματοληψίας s 4 Hz. Από τις αποκρίσεις δώστε τα τελικά σφάλματα %. SIMULINK 30
 + - S(s) Σχήμα.11 Σύστημα ου βαθμού H μετατροπή μπορεί να γίνει, όπως και για το σύστημα 1 ου βαθμού, με δύο τρόπους.")
31 .6 Άσκηση 5 η : Σύστημα ου βαθμού (μετατροπή σε ψηφιακό) Έστω ότι θέλουμε να μετατρέψουμε σε ψηφιακό το ΣΑΕ ου βαθμού (Σχήμα.11), για Κ=4 και τ= sec και για βηματική είσοδο. Η συχνότητα δειγματοληψίας είναι 10 Hz. E(s) + - S(s) Σχήμα.11 Σύστημα ου βαθμού H μετατροπή μπορεί να γίνει, όπως και για το σύστημα 1 ου βαθμού, με δύο τρόπους. Με την προσθήκη δύο ΖΟΗ, ή με την εύρεση της Σ.Μ ανοιχτού βρόχου κατά z. Το εξομοιωμένο κύκλωμα για τις τρεις περιπτώσεις φαίνεται στο Σχήμα.1 και οι αποκρίσεις στο Σχήμα.13. Οι αποκρίσεις των δύο ψηφιοποιημένων συστημάτων είναι ακριβώς ίδιες. Σχήμα.1 Εξομοίωση του αναλογικού και του ψηφιακού ΣΑΕ ου βαθμού Το αναλογικό σύστημα (καθώς πρόκειται για σύστημα ου βαθμού) θα είναι ευσταθές για οποιαδήποτε θετική τιμή του Κ (0< Κ< ). Σ ότι αφορά την ευστάθεια του ψηφιακού συστήματος τα πράγματα είναι διαφορετικά. Η χαρακτηριστική του εξίσωση θα είναι: Q(z)=z -(1, K)z+0,95+0,005K=0 SIMULINK 31
32 Εφαρμόζοντας το κριτήριο της ευστάθειας του Jury θα έχουμε ότι το σύστημα περνάει στην α- στάθεια για Κ>0,168. Σχήμα.13 Σήματα εισόδου εξόδων Επαναλάβετε την όλη διαδικασία για συχνότητα δειγματοληψίας 5 Hz. Τι παρατηρείτε για την ευστάθεια του συστήματος; SIMULINK 3
33 3 ΔΙΟΡΘΩΣΗ Σ.Α.Ε Στην συνέχεια θα ασχοληθούμε με την διόρθωση των ΣΑΕ. Πιο συγκεκριμένα θα διορθώσουμε αναλογικά συστήματα 1 ου, ου και 3 ου βαθμού, ένα σύστημα με καθαρή χρονική καθυστέρηση, καθώς και τα ψηφιακά 1 ου και ου βαθμού. Το Matlab (Simulink) στις νεώτερες εκδόσεις του εμπεριέχει την δυνατότητα αυτορρύθμισης (tuning) των σταθερών του διορθωτή PID, δυνατότητα την οποία και θα χρησιμοποιήσουμε. 3.1 Άσκηση 1 η : Διόρθωση ΣΑΕ 1 ου βαθμού Θα διορθώσουμε το ΣΑΕ 1 ου βαθμού το οποίο μελετήσαμε ήδη. Το κύκλωμα θα είναι όπως αυτό που φαίνεται στο Σχήμα 3.1. Η επιλογή του διορθωτή για το ΣΑΕ 1 ου βαθμού είναι με επενέργεια PI. Η Συνάρτηση Μεταφοράς του διορθωτή είναι: PI K Οι σταθερές του διορθωτή επιλέγονται εμπειρικά με P=1 και I=0,5. Προφανώς και μπορούν να γίνουν κι άλλες προσεγγίσεις για τις τιμές των συντελεστών του. p K s i Σχήμα 3.1 Διόρθωση ΣΑΕ 1 ου βαθμού με Διορθωτή PI Από την απόκριση των δύο συστημάτων (με και χωρίς διόρθωση) είναι προφανές ότι η ανωτέρω επιλογή των συντελεστών διορθώνει ικανοποιητικά το ΣΑΕ (Σχήμα 3.). Στην συνέχεια, μπορούμε να επιλέξουμε την αυτορρύθμιση του PI με το κουμπί Tune (Σχήμα 3.3). Η αυτορρύθμιση του διορθωτή, πέρα από την επιλογή των παραμέτρων του, κάνει και την επιλογή του τύπου της διόρθωσης (PI, PID). Επίσης μας δίνει την δυνατότητα να μελετήσουμε την συμπεριφορά του ΣΑΕ πέρα από την κύρια είσοδο- και ως προς την διατάραξη, βηματικής μορφής αμφότερες. Η αποκρίσεις του συστήματος με την διαδικασία της αυτορρύθμισης δίδονται στα σχήματα 3.4 & 3.5, για την κύρια είσοδο και την διατάραξη αντίστοιχα, όπου φαίνονται και τα μεγέθη του ΣΑΕ, τα οποία μεταβάλλονται όταν μεταβάλλουμε το slider με την επιλογή στην ταχύτητα απόκρισης. SIMULINK 33

34 Σχήμα 3. Βηματική απόκριση ΣΑΕ 1 ου βαθμού με Διορθωτή PI Σχήμα 3.3 Αυτορρύθμιση του διορθωτή PI SIMULINK 34

35 Σχήμα 3.4 Απόκριση του ΣΑΕ 1 ου βαθμού με αυτορυθμιζόμενο διορθωτή PI Σχήμα 3.5 Απόκριση σε διατάραξη του ΣΑΕ 1 ου βαθμού με αυτορυθμιζόμενο διορθωτή PI SIMULINK 35
36 3. Άσκηση η : Διόρθωση ΣΑΕ ου βαθμού Όπως και για το ΣΑΕ 1 ου βαθμού, έτσι και εδώ θα πάρουμε το ΣΑΕ ου βαθμού που χρησιμοποιήσαμε αρχικά, μόνο που εδώ η διόρθωση θα γίνει με PID. Σχήμα 3.6 Διόρθωση ΣΑΕ ου βαθμού με Διορθωτή PID Επειδή όμως η επενέργεια D δημιουργεί προβλήματα ευστάθειας, συνήθως χρησιμοποιείται μαζί με ένα φίλτρο για την αποτροπή αυτών των παρενεργειών και ο διορθωτής γίνεται τότε PIDF. Για τον υπολογισμό των συντελεστών του διορθωτή θα χρησιμοποιήσουμε την μέθοδο Ziegler Nichols. Οι Συναρτήσεις Μεταφοράς του διορθωτή στις δύο περιπτώσεις θα είναι: PID PIDF Ki K p Kd s s Ki Kd s K p s T s 1 Η μέθοδος Ziegler Nichols συνοψίζεται στον κάτωθι πίνακα. Όπου: Τύπος Διόρθωσης Kp Ki, Kd P 0,5 Ku - - PI 0,45 Ku 1, (Kp/Tu) - PID 0,6 Ku (Kp/Tu) (KpTu)/8 Ku : Η ενίσχυση που οδηγεί το σύστημα σε ταλάντωση Tu : Η περίοδος των ταλαντώσεων Στην περίπτωση του ΣΑΕ, η περίοδος Tu των ταλαντώσεων είναι περίπου 4,5 sec και η ενίσχυση Ku =4. Σύμφωνα με την μέθοδο θα έχουμε: Kp = 0,6 Ku =0,6.4=,4 Ki = (Kp/Tu) = (,4/4,5)=1,067 Kd =(KpTu)/8=(,4.4,5)/8= 1.35 Η τιμή για το φίλτρο τίθεται αυτόματα στο Ν=100. f SIMULINK 36

37 Στο Σχήμα 3.6 φαίνεται η βηματική απόκριση του συστήματος με (και χωρίς) διόρθωση. Στα ε- πόμενα σχήματα 3.7, 3.8, παρουσιάζονται αντίστοιχα οι αποκρίσεις του συστήματος με την αυτορρύθμιση, όπως και στο σύστημα 1 ου βαθμού. Σχήμα 3.7 Βηματική απόκριση ΣΑΕ ου βαθμού με Διορθωτή PI Σχήμα 3.8 Απόκριση του ΣΑΕ ου βαθμού με αυτορυθμιζόμενο διορθωτή PID SIMULINK 37
38 Σχήμα 3.9 Απόκριση σε διατάραξη του ΣΑΕ ου βαθμού με αυτορυθμιζόμενο διορθωτή PID 3.3 Άσκηση 3 η : Διόρθωση ΣΑΕ 3 ου βαθμού Έστω ένα ΣΑΕ κλειστού βρόχου μοναδιαίας επιστροφής, με Συνάρτηση Μεταφοράς του απ ευθείας κλάδου, 3 ου βαθμού: G s s s 3s 3s 1 Η εξομοίωσή του (με και χωρίς διόρθωση) στο Simulink θα είναι όπως φαίνεται στο σχήμα Σχήμα 3.10 ΣΑΕ 3 ου βαθμού με και χωρίς διόρθωση PID SIMULINK 38


39 Η αποκρίσεις με (και χωρίς) αυτορρυθμιζόμενη διόρθωση φαίνονται στα Σχήματα 3.10, Σχήμα 3.11 Απόκριση του ΣΑΕ 3 ου βαθμού με αυτορυθμιζόμενο διορθωτή PID Σχήμα 3.1 Απόκριση σε διατάραξη του ΣΑΕ 3 ου βαθμού με αυτορυθμιζόμενο διορθωτή PID SIMULINK 39


40 3.4 Άσκηση 5 η : Διόρθωση ΣΑΕ με καθαρή καθυστέρηση Η χρονική καθυστέρηση είναι ένα μέγεθος που εμφανίζεται στα ΣΑΕ και συνίσταται στο ότι υ- πάρχει μια καθυστέρηση στο σήμα μέσα στον βρόχο ελέγχου, η οποία έχει την προέλευσή της στα φυσικά κατασκευαστικά στοιχεία του συστήματος. Για παράδειγμα, όταν σε ένα σύστημα θέρμανσης ενός χώρου (Σχήμα 3.13), το στοιχείο μέτρησης της θερμοκρασίας βρίσκεται σε απομακρυσμένο σημείο, σε σχέση με το σημείο παροχής της θερμότητας, τότε οι αλλαγές στην θερμοκρασία του χώρου αργούν να φτάσουν στο σημείο μέτρησης. Αυτή η αργοπορία εκφράζεται σε χρόνο καθυστέρησης L. Αυτή η καθυστέρηση σχηματικά φαίνεται στο Σχήμα 3.1. Μαθηματικά συμμετέχει στην Συνάρτηση Μεταφοράς με την κάτωθι μορφή e Ls : Σχήμα 3.13 Αποτύπωση της καθυστέρησης μεταξύ σημάτων εισόδου - εξόδου Σχήμα 3.14 Σύστημα ελέγχου θερμοκρασίας της Feedback SIMULINK 40

41 Άλλο παράδειγμα συστήματος με καθυστέρηση φαίνεται στο σχήμα Εδώ η καθυστέρηση προκύπτει από τον χρόνο που απαιτείται για να φτάσει το νερό, από την βαλβίδα που ρυθμίζει την ροή μέχρι το δοχείο και εξαρτάται από το μήκος του σωλήνα και την ταχύτητα ροής του νερού. Σχήμα 3.15 Σύστημα ελέγχου στάθμης Ένα παρόμοιο σύστημα θα μελετήσουμε στην συνέχεια, με L=1 sec και Σ. Μ. ανοιχτού βρόχου: G s s 6s 5e s 1 s s 3s 4 Η εξομοίωσή του στο Simulink θα είναι όπως φαίνεται στο σχήμα 3.15 Σχήμα 3.16 Σύστημα με καθυστέρηση Οι αποκρίσεις του συστήματος (με και χωρίς την διόρθωση) φαίνονται στα σχήματα 3.16, SIMULINK 41

42 Σχήμα 3.17 Απόκριση του ΣΑΕ με καθυστέρηση με αυτορυθμιζόμενο διορθωτή PI Σχήμα 3.18 Απόκριση του ΣΑΕ με καθυστέρηση με αυτορυθμιζόμενο διορθωτή PI SIMULINK 4
43 3.5 Άσκηση 6 η : Διόρθωση ψηφιακού ΣΑΕ 1 ου βαθμού Θα μελετήσουμε στην συνέχεια την διόρθωση PI του ψηφιακού ΣΑΕ 1 ου βαθμού, όπως το είχαμε μετατρέψει από το αναλογικό του, με συχνότητα δειγματοληψίας 0,1 sec. Σχήμα 3.19 Αναλογικό, ψηφιακό και ψηφιακό ΣΑΕ 1 ου βαθμού με διορθωτή PI Οι αποκρίσεις του συστήματος με αυτορρύθμιση PI, σε βηματικές (κύρια είσοδο και διατάραξη), φαίνονται στα σχήματα 3.19 και 3.0 αντίστοιχα. Σχήμα 3.0 Βηματική απόκριση ψηφιακού ΣΑΕ 1 ου βαθμού με διορθωτή PI SIMULINK 43

44 Σχήμα 3.1 Απόκριση βηματικής διατάραξης ψηφιακού ΣΑΕ 1 ου βαθμού με διορθωτή PI 3.6 Άσκηση 7 η : Διόρθωση ψηφιακού ΣΑΕ ου βαθμού Θα μελετήσουμε στην συνέχεια την διόρθωση PID του ψηφιακού ΣΑΕ ου βαθμού, όπως το είχαμε μετατρέψει από το αναλογικό του, με συχνότητα δειγματοληψίας 0,1 sec. Σχήμα 3. Αναλογικό, ψηφιακό και ψηφιακό ΣΑΕ ου βαθμού με διορθωτή PID SIMULINK 44
, φαίνονται στα σχήματα 3. και 3.3 αντίστοιχα.")

45 Οι αποκρίσεις του συστήματος με αυτορρύθμιση PID, σε βηματικές (κύρια είσοδο και διατάραξη), φαίνονται στα σχήματα 3. και 3.3 αντίστοιχα. Σχήμα 3.3 Βηματική απόκριση ψηφιακού ΣΑΕ ου βαθμού με διορθωτή PID Σχήμα 3.4 Απόκριση βηματικής διατάραξης ψηφιακού ΣΑΕ ου βαθμού με διορθωτή PID SIMULINK 45

46 ΠΑΡΑΡΤΗΜΑ SIMULINK 46

47 SIMULINK 47

48 SIMULINK 48

49 SIMULINK 49

50 SIMULINK 50

51 SIMULINK 51

52 SIMULINK 5

53 SIMULINK 53

54 SIMULINK 54

55 SIMULINK 55
ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB)
") ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) ΤΕΙ Α.Μ.Θ. ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΘΗΓΗΤΗΣ ΤΣΙΡΙΓΩΤΗΣ ΓΕΩΡΓΙΟΣ ΚΑΒΑΛΑ 08 ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB). ΕΞΟΜΟΙΩΣΗ ΑΝΑΛΟΓΙΚΩΝ Σ.Α.Ε. Εισαγωγή στο
ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB) ΤΕΙ Α.Μ.Θ. ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ ΚΑΘΗΓΗΤΗΣ ΤΣΙΡΙΓΩΤΗΣ ΓΕΩΡΓΙΟΣ ΚΑΒΑΛΑ 08 ΕΞΟΜΟΙΩΣΗ Σ.Α.Ε ΜΕ ΤΟ SIMULINK (MATLAB). ΕΞΟΜΟΙΩΣΗ ΑΝΑΛΟΓΙΚΩΝ Σ.Α.Ε. Εισαγωγή στο
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΘΡΑΚΗΣ Τμήμα Μηχανικών Πληροφορικής Τ.Ε. ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Εργαστήριο
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΘΡΑΚΗΣ Τμήμα Μηχανικών Πληροφορικής Τ.Ε ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Εργαστήριο Καθηγητής: Τσιριγώτης Γεώργιος Καβάλα, 2014 1 ΕΙΣΑΓΩΓΗ ΣΤΟ SIMULINK Το MATLAB 1 είναι ένα μαθηματικό λογισμικό,
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΘΡΑΚΗΣ Τμήμα Μηχανικών Πληροφορικής Τ.Ε ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Εργαστήριο Καθηγητής: Τσιριγώτης Γεώργιος Καβάλα, 2014 1 ΕΙΣΑΓΩΓΗ ΣΤΟ SIMULINK Το MATLAB 1 είναι ένα μαθηματικό λογισμικό,
Είδη Διορθωτών: Υπάρχουν πολλών ειδών διορθωτές. Μία βασική ταξινόμησή τους είναι οι «Ειδικοί Διορθωτές» και οι «Κλασσικοί Διορθωτές».
 ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
ΔΙΟΡΘΩΣΗ ΣΑΕ Είδη Διορθωτών: Οι Διορθωτές έχουν την δική τους (Σ.Μ). Ενσωματώνονται στον βρόχο του ΣΑΕ και δρουν πάνω στην αρχική Σ.Μ κατά τρόπο ώστε να της προσδώσουν την επιθυμητή συμπεριφορά, την οποία
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ
 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ E() ε() Διορθωτής D() ε c () Σύστημα G() S() Η() Ανάδραση H() E() ε() Διορθωτής D() ε c () Σύστημα G() S() Υπολογιστής Η() Ανάδραση H() Αναλογικό και ψηφιακό ΣΑΕ Πλεονεκτήματα
ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ E() ε() Διορθωτής D() ε c () Σύστημα G() S() Η() Ανάδραση H() E() ε() Διορθωτής D() ε c () Σύστημα G() S() Υπολογιστής Η() Ανάδραση H() Αναλογικό και ψηφιακό ΣΑΕ Πλεονεκτήματα
MATLAB. Εισαγωγή στο SIMULINK. Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής
 MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
MATLAB Εισαγωγή στο SIMULINK Μονάδα Αυτόματης Ρύθμισης και Πληροφορικής Εισαγωγή στο Simulink - Βιβλιοθήκες - Παραδείγματα Εκκίνηση BLOCKS click ή Βιβλιοθήκες Νέο αρχείο click ή Προσθήκη block σε αρχείο
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Συνάρτηση Μεταφοράς Σ.Δ.Δ. Διακριτοποίηση Συν. Μεταφοράς Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Συνάρτηση Μεταφοράς Σ.Δ.Δ. Διακριτοποίηση Συν. Μεταφοράς Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ
 ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
ΤΕΙ ΑΝΑΤΟΛΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ & ΘΡΑΚΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε Πτυχιακή εργασία ΜΕΛΕΤΗ ΣΥΣΤΗΜΑΤΟΣ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΘΕΣΗΣ ΓΡΑΦΙΔΑΣ ΕΚΤΥΠΩΤΗ ΕΚΠΟΝΗΣΗ: ΚΟΛΙΩΤΣΑ ΜΑΡΙΑ ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΤΣΙΡΙΓΩΤΗΣ
Ψηφιακός Έλεγχος. 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
Ψηφιακός Έλεγχος 6 η διάλεξη Σχεδίαση στο χώρο κατάστασης Ψηφιακός Έλεγχος Μέθοδος μετατόπισης ιδιοτιμών Έστω γραμμικό χρονικά αμετάβλητο σύστημα διακριτού χρόνου: ( + ) = + x k Ax k Bu k Εφαρμόζουμε γραμμικό
Ψηφιακός Έλεγχος. 10 η διάλεξη Ασκήσεις. Ψηφιακός Έλεγχος 1
 Ψηφιακός Έλεγχος 10 η διάλεξη Ασκήσεις Ψηφιακός Έλεγχος 1 Άσκηση1 Ασκήσεις Επιθυμούμε να ελέγξουμε την γωνία ανύψωσης μιας κεραίας για να παρακολουθείται η θέση ενός δορυφόρου. Το σύστημα της κεραίας και
Ψηφιακός Έλεγχος 10 η διάλεξη Ασκήσεις Ψηφιακός Έλεγχος 1 Άσκηση1 Ασκήσεις Επιθυμούμε να ελέγξουμε την γωνία ανύψωσης μιας κεραίας για να παρακολουθείται η θέση ενός δορυφόρου. Το σύστημα της κεραίας και
Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου
 Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου Μετατροπή Αναλογικού Σήµατος σε Ψηφιακό (A/D Conversion) Ο µετασχηµατισµός Ζ Μαθηµατική Ανάλυση της ιαδικασίας A/D Μετατροπή Ψηφιακού Σήµατος
Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου Μετατροπή Αναλογικού Σήµατος σε Ψηφιακό (A/D Conversion) Ο µετασχηµατισµός Ζ Μαθηµατική Ανάλυση της ιαδικασίας A/D Μετατροπή Ψηφιακού Σήµατος
Μετατροπή Αναλογικού Σήµατος σε. Ψηφιακό (A/D Conversion) Μετατροπή Ψηφιακού Σήµατος σε Αναλογικό (D/A Conversion)
 Μετατροπή Ψηφιακού Σήµατος σε Αναλογικό (D/A Conversion)") Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου Μετατροπή Αναλογικού Σήµατος σε Ο µετασχηµατισµός Ζ Ψηφιακό (A/D Conversion) Μαθηµατική Ανάλυση της ιαδικασίας A/D Μετατροπή Ψηφιακού Σήµατος
Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου Μετατροπή Αναλογικού Σήµατος σε Ο µετασχηµατισµός Ζ Ψηφιακό (A/D Conversion) Μαθηµατική Ανάλυση της ιαδικασίας A/D Μετατροπή Ψηφιακού Σήµατος
Λύσεις θεμάτων Α εξεταστικής περιόδου εαρινού εξαμήνου (Ιούνιος 2015)
") Λύσεις θεμάτων Α εξεταστικής περιόδου εαρινού εξαμήνου 204 5 (Ιούνιος 205) ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος. α. Να προσδιοριστούν οι τιμές
Λύσεις θεμάτων Α εξεταστικής περιόδου εαρινού εξαμήνου 204 5 (Ιούνιος 205) ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος. α. Να προσδιοριστούν οι τιμές
2014 Παρίσης Κ., Καθηγητής
 Είναι μια προέκταση του Matlab με την δυνατότητα μοντελοποίησης, προσομοίωσης και ανάλυσης συστημάτων μέσω ενός γραφικού περιβάλλοντος χρήστη (GUI). Η κατασκευή ενός μοντέλου είναι πολύ απλή και γρήγορη
Είναι μια προέκταση του Matlab με την δυνατότητα μοντελοποίησης, προσομοίωσης και ανάλυσης συστημάτων μέσω ενός γραφικού περιβάλλοντος χρήστη (GUI). Η κατασκευή ενός μοντέλου είναι πολύ απλή και γρήγορη
Ο ελεγκτής PID χοντρικά...
 Ο ελεγκτής PID χοντρικά... Έχετε ένα αμάξι που με τέρμα γκάζι πηγαίνει 200χλμ.. Σας λέει κάποιος λοιπόν ότι θέλει να πάτε με 100 ακριβώς. Λέει κάποιος άλλος..θα πατήσω το γκάζι μέχρι την μέση και άρα θα
Ο ελεγκτής PID χοντρικά... Έχετε ένα αμάξι που με τέρμα γκάζι πηγαίνει 200χλμ.. Σας λέει κάποιος λοιπόν ότι θέλει να πάτε με 100 ακριβώς. Λέει κάποιος άλλος..θα πατήσω το γκάζι μέχρι την μέση και άρα θα
Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου
 Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου u Μετατροπή Αναλογικού Σήµατος σε Ψηφιακό (A/D Conversion) Ο µετασχηµατισµός Ζ u Μαθηµατική Ανάλυση της Διαδικασίας A/D Μετατροπή Ψηφιακού Σήµατος
Κεφάλαιο 2 Διαχείριση Σηµάτων σε Ψηφιακά Συστήµατα Ελέγχου u Μετατροπή Αναλογικού Σήµατος σε Ψηφιακό (A/D Conversion) Ο µετασχηµατισµός Ζ u Μαθηµατική Ανάλυση της Διαδικασίας A/D Μετατροπή Ψηφιακού Σήµατος
Σήματα και Συστήματα. Διάλεξη 2: Στοιχειώδη Σήματα Συνεχούς Χρόνου. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 2: Στοιχειώδη Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Στοιχειώδη Σήματα Συνεχούς Χρόνου 1. Μοναδιαία Βηματική Συνάρτηση 2. Κρουστική Συνάρτηση ή
Σήματα και Συστήματα Διάλεξη 2: Στοιχειώδη Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Στοιχειώδη Σήματα Συνεχούς Χρόνου 1. Μοναδιαία Βηματική Συνάρτηση 2. Κρουστική Συνάρτηση ή
ΘΕΩΡΙΑ ΠΛΗΡΟΦΟΡΙΑΣ. Κεφάλαιο 7-8 : Συστήματα Δειγματοληψία Χρήστος Ξενάκης. Πανεπιστήμιο Πειραιώς, Τμήμα Ψηφιακών Συστημάτων
 ΘΕΩΡΙΑ ΠΛΗΡΟΦΟΡΙΑΣ Κεφάλαιο 7-8 : Συστήματα Δειγματοληψία Χρήστος Ξενάκης Πανεπιστήμιο Πειραιώς, Τμήμα Ψηφιακών Συστημάτων Περιεχόμενα Ομιλίας Κεφάλαιο 7 ο Ταξινόμηση Συστημάτων Κρουστική Απόκριση Κεφάλαιο
ΘΕΩΡΙΑ ΠΛΗΡΟΦΟΡΙΑΣ Κεφάλαιο 7-8 : Συστήματα Δειγματοληψία Χρήστος Ξενάκης Πανεπιστήμιο Πειραιώς, Τμήμα Ψηφιακών Συστημάτων Περιεχόμενα Ομιλίας Κεφάλαιο 7 ο Ταξινόμηση Συστημάτων Κρουστική Απόκριση Κεφάλαιο
3 Διακριτοποίηση Συστημάτων Συνεχούς Χρόνου... 65
 ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
ΠΕΡΙΕΧΟΜΕΝΑ \ Πρόλογος 15 1 Εισαγωγικά Στοιχεία Βιομηχανικού Ελέγχου 19 1.1 Μοντέλα Περιγραφής Βιομηχανικών Συστημάτων... 19 1.2 Βιομηχανικοί Ελεγκτές 23 1.2.1 Σύστημα 23 1.2.2 Σύνδεση Συστημάτων 26 1.2.3
Πόλοι φανταστικοί. Είναι μια ιδιαίτερη περίπτωση των μιγαδικών πόλων με συντελεστή απόσβεσης ξ=0. jω. s 1 σ. s 3. s 2
 Πόλοι φανταστικοί Είναι μια ιδιαίτερη περίπτωση των μιγαδικών πόλων με συντελεστή απόσβεσης ξ=0. jω 3 σ F P Q P 3 n 3 3 Πόλοι φανταστικοί 3 3 3 P Q P F n j j e e e n n 3 3 j j n n n n e 3 3 n φ=τόξο του
Πόλοι φανταστικοί Είναι μια ιδιαίτερη περίπτωση των μιγαδικών πόλων με συντελεστή απόσβεσης ξ=0. jω 3 σ F P Q P 3 n 3 3 Πόλοι φανταστικοί 3 3 3 P Q P F n j j e e e n n 3 3 j j n n n n e 3 3 n φ=τόξο του
Ρυθµιστές PID. Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID
 Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID") Ρυθµιστές PID Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID 1 Βρόχος Ανατροφοδότησης! Θεωρούµε το βρόχο ανατροφοδότησης SP ιεργασία D G
Ρυθµιστές PID Βρόχος Ανατροφοδότησης Αναλογικός Ρυθµιστής (Ρ) Ολοκληρωτικός Ρυθµιστής (Ι) ιαφορικός Ρυθµιστής (D) Ρύθµιση PID 1 Βρόχος Ανατροφοδότησης! Θεωρούµε το βρόχο ανατροφοδότησης SP ιεργασία D G
M m l B r mglsin mlcos x ml 2 1) Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br
 Να εισαχθεί το µοντέλο στο simulink ορίζοντας από πριν στο MATLAB τις µεταβλητές Μ,m,br") ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
ΑΣΚΗΣΗ 1 Έστω ένα σύστηµα εκκρεµούς όπως φαίνεται στο ακόλουθο σχήµα: Πάνω στη µάζα Μ επιδρά µια οριζόντια δύναµη F l την οποία και θεωρούµε σαν είσοδο στο σύστηµα. Έξοδος του συστήµατος θεωρείται η απόσταση
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου
 Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 7 η : ΕΛΕΓΚΤΕΣ PID Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Εισαγωγικές έννοιες θεωρίας Συστημάτων Αυτομάτου Ελέγχου Ενότητα 7 η : ΕΛΕΓΚΤΕΣ PID Επ. Καθηγητής Γαύρος Κωνσταντίνος ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΒΙΟΜΗΧΑΝΙΚΟΥ ΣΧΕΔΙΑΣΜΟΥ ΤΕ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK
 ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK SIMULINK ρ. Γεώργιος Φ. Φραγκούλης Καθηγητής ver. 0.2 10/2012 Εισαγωγή στο Simulink Το SIMULINK είναι ένα λογισµικό πακέτο που επιτρέπει τη µοντελοποίηση, προσοµοίωση οίωση
ΕΙΣΑΓΩΓΗ ΣΤΟ MATLAB- SIMULINK SIMULINK ρ. Γεώργιος Φ. Φραγκούλης Καθηγητής ver. 0.2 10/2012 Εισαγωγή στο Simulink Το SIMULINK είναι ένα λογισµικό πακέτο που επιτρέπει τη µοντελοποίηση, προσοµοίωση οίωση
Παραρτήματα. Παράρτημα 1 ο : Μιγαδικοί Αριθμοί
 Παράρτημα ο : Μιγαδικοί Αριθμοί Παράρτημα ο : Μετασχηματισμός Lplce Παράρτημα 3 ο : Αντίστροφος μετασχηματισμός Lplce Παράρτημα 4 ο : Μετασχηματισμοί δομικών διαγραμμάτων Παράρτημα 5 ο : Τυποποιημένα σήματα
Παράρτημα ο : Μιγαδικοί Αριθμοί Παράρτημα ο : Μετασχηματισμός Lplce Παράρτημα 3 ο : Αντίστροφος μετασχηματισμός Lplce Παράρτημα 4 ο : Μετασχηματισμοί δομικών διαγραμμάτων Παράρτημα 5 ο : Τυποποιημένα σήματα
Συστήματα Αυτομάτου Ελέγχου
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
Βαθμολογία Προβλημάτων Θέμα (μέγιστος βαθμός) (βαθμός εξέτασης)
 (βαθμός εξέτασης)") 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Ιουλίου 007 ΕΠΩΝΥΜΟ (εξεταζόμενου/ης) ΟΝΟΜΑ (εξεταζόμενου/ης) Αριθμός Μητρώου Υπογραφή (εξεταζόμενου/ης)
4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Ιουλίου 007 ΕΠΩΝΥΜΟ (εξεταζόμενου/ης) ΟΝΟΜΑ (εξεταζόμενου/ης) Αριθμός Μητρώου Υπογραφή (εξεταζόμενου/ης)
Σεισμολογικά Όργανα Κεφάλαιο 8. Chang Heng 132 π.χ.
 Σεισμολογικά Όργανα Κεφάλαιο 8 Chang Heng 132 π.χ. Οι πρώτες προσπάθειες Chang Heng Guatemala Earthquake 1976 Σεισμολογικά Όργανα Σεισμοσκόπια (δεν υπάρχει χρονική κλίμακα αναφοράς) Forbes' seismometer
Σεισμολογικά Όργανα Κεφάλαιο 8 Chang Heng 132 π.χ. Οι πρώτες προσπάθειες Chang Heng Guatemala Earthquake 1976 Σεισμολογικά Όργανα Σεισμοσκόπια (δεν υπάρχει χρονική κλίμακα αναφοράς) Forbes' seismometer
Συστήματα Αυτομάτου Ελέγχου II
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου II Ενότητα #2: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου - Μόνιμα Σφάλματα Δημήτριος Δημογιαννόπουλος
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτομάτου Ελέγχου II Ενότητα #2: Ποιοτικά Χαρακτηριστικά Συστημάτων Κλειστού Βρόχου - Μόνιμα Σφάλματα Δημήτριος Δημογιαννόπουλος
Εξεταστική Ιανουαρίου 2007 Μάθηµα: «Σήµατα και Συστήµατα»
 Εξεταστική Ιανουαρίου 27 Μάθηµα: «Σήµατα και Συστήµατα» Θέµα 1 ο (3%) Έστω δύο διακριτά σήµατα: x(n) = {1,,, -1} και h(n) = {1,, 1} µε το πρώτο δείγµα να αντιστοιχεί σε n= και για τα δύο. Υπολογίστε τα
Εξεταστική Ιανουαρίου 27 Μάθηµα: «Σήµατα και Συστήµατα» Θέµα 1 ο (3%) Έστω δύο διακριτά σήµατα: x(n) = {1,,, -1} και h(n) = {1,, 1} µε το πρώτο δείγµα να αντιστοιχεί σε n= και για τα δύο. Υπολογίστε τα
Υποθέστε ότι ο ρυθμός ροής από ένα ακροφύσιο είναι γραμμική συνάρτηση της διαφοράς στάθμης στα δύο άκρα του ακροφυσίου.
 ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
ΕΡΩΤΗΜΑ Δίνεται το σύστημα δεξαμενών του διπλανού σχήματος, όπου: q,q : h,h : Α : R : οι παροχές υγρού στις δύο δεξαμενές, τα ύψη του υγρού στις δύο δεξαμενές, η διατομή των δεξαμενών και η αντίσταση ροής
Συστήματα Αυτομάτου Ελέγχου-Εργαστήριο
 4.4. ΣΥΣΤΗΜΑΤΑ ΔΕΥΤΕΡΗΣ ΤΑΞΗΣ 4.4.1. Αναλογικό διάγραμμα δεύτερης τάξης Ένα φυσικό σύστημα δεύτερης τάξης έχει διαφορική εξίσωση: y + α 1 y + a 0 y = b u(t) ή d2 y dy(t) + a dt 2+α1 dt 0 y(t) = b u(t)
4.4. ΣΥΣΤΗΜΑΤΑ ΔΕΥΤΕΡΗΣ ΤΑΞΗΣ 4.4.1. Αναλογικό διάγραμμα δεύτερης τάξης Ένα φυσικό σύστημα δεύτερης τάξης έχει διαφορική εξίσωση: y + α 1 y + a 0 y = b u(t) ή d2 y dy(t) + a dt 2+α1 dt 0 y(t) = b u(t)
Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου
 Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου 203 4 ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος ελέγχου κλειστού βρόχου. α. Να προσδιοριστεί
Λύσεις θεμάτων Α εξεταστικής περιόδου Χειμερινού εξαμήνου 203 4 ΘΕΜΑ Ο (4,0 μονάδες) Στο παρακάτω σχήμα δίνεται το δομικό (λειτουργικό) διάγραμμα ενός συστήματος ελέγχου κλειστού βρόχου. α. Να προσδιοριστεί
ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ. Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου
 ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Οκτώβριος 011 MATLAB
ΑΕΝ / ΑΣΠΡΟΠΥΡΓΟΥ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΕΡΓΑΣΤΗΡΙΟ ΑΥΤΟΜΑΤΙΣΜΟΥ Σημειώσεις για τη χρήση του MATLAB στα Συστήματα Αυτομάτου Ελέγχου Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Κ. ΝΑΣΟΠΟΥΛΟΣ - Α. ΧΡΗΣΤΙ ΟΥ Οκτώβριος 011 MATLAB
Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής.
 ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Έλεγχος στροφών κινητήρα DC με ελεγκτή PI, και αντιστάθμιση διαταραχής. Α) Σκοπός: Σκοπός της παρούσας άσκησης είναι να επιδειχθεί ο έλεγχος των στροφών
ΤΟ ΜΑΥΡΟ ΚΟΥΤΙ. 1. Το περιεχόμενο του μαύρου κουτιού. 2. Είσοδος: σήματα (κυματομορφές) διέγερσης 3. Έξοδος: απόκριση. (απλά ηλεκτρικά στοιχεία)
 διέγερσης 3. Έξοδος: απόκριση. (απλά ηλεκτρικά στοιχεία)") ΤΟ ΜΑΥΡΟ ΚΟΥΤΙ Είσοδος ΜΑΥΡΟ ΚΟΥΤΙ Έξοδος 1. Το περιεχόμενο του μαύρου κουτιού (απλά ηλεκτρικά στοιχεία) 2. Είσοδος: σήματα (κυματομορφές) διέγερσης 3. Έξοδος: απόκριση 2019Κ1-1 ΚΥΜΑΤΟΜΟΡΦΕΣ 2019Κ1-2 ΤΙ
ΤΟ ΜΑΥΡΟ ΚΟΥΤΙ Είσοδος ΜΑΥΡΟ ΚΟΥΤΙ Έξοδος 1. Το περιεχόμενο του μαύρου κουτιού (απλά ηλεκτρικά στοιχεία) 2. Είσοδος: σήματα (κυματομορφές) διέγερσης 3. Έξοδος: απόκριση 2019Κ1-1 ΚΥΜΑΤΟΜΟΡΦΕΣ 2019Κ1-2 ΤΙ
Συστήματα Αυτομάτου Ελέγχου
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Καθ. Εφαρμογών: Σ. Βασιλειάδου Εργαστήριο Συστήματα Αυτομάτου Ελέγχου για Ηλεκτρολόγους Μηχανικούς Εργαστηριακές Ασκήσεις Χειμερινό
ΧΡΟΝΙΚΗ ΑΠΟΚΡΙΣΗ ΣΥΝΑΡΤΗΣΕΙ ΤΩΝ ΠΟΛΩΝ ΤΗΣ ΣΥΝΑΡΤΗΣΗΣ ΕΞΟΔΟΥ Y(s) ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΓΝΩΡΙΣΜΑΤΑ ΤΗΣ ΧΡΟΝΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΕ ΕΙΣΟΔΟ ΜΟΝΑΔΙΑΙΑΣ ΒΑΘΜΙΔΑΣ
 ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΓΝΩΡΙΣΜΑΤΑ ΤΗΣ ΧΡΟΝΙΚΗΣ ΑΠΟΚΡΙΣΗΣ ΣΕ ΕΙΣΟΔΟ ΜΟΝΑΔΙΑΙΑΣ ΒΑΘΜΙΔΑΣ") ΧΡΟΝΙΚΗ ΑΠΟΚΡΙΣΗ ΣΥΝΑΡΤΗΣΕΙ ΤΩΝ ΠΟΛΩΝ ΤΗΣ ΣΥΝΑΡΤΗΣΗΣ ΕΞΟΔΟΥ Y(s) 1 Πόλος στην αρχή των αξόνων: 2 Πόλος στον αρνητικό πραγματικό ημιάξονα: 3 Πόλος στον θετικό πραγματικό ημιάξονα: 4 Συζυγείς πόλοι πάνω
ΧΡΟΝΙΚΗ ΑΠΟΚΡΙΣΗ ΣΥΝΑΡΤΗΣΕΙ ΤΩΝ ΠΟΛΩΝ ΤΗΣ ΣΥΝΑΡΤΗΣΗΣ ΕΞΟΔΟΥ Y(s) 1 Πόλος στην αρχή των αξόνων: 2 Πόλος στον αρνητικό πραγματικό ημιάξονα: 3 Πόλος στον θετικό πραγματικό ημιάξονα: 4 Συζυγείς πόλοι πάνω
Θεωρείστε το σύστηµα του ανεστραµµένου εκκρεµούς-οχήµατος του Σχ. 1 το οποίο περιγράφεται από το δυναµικό µοντέλο
 ΨΣΕ 3 η Εργαστηριακή Άσκηση Γραµµικοποιήση µε ανατροφοδότηση εξόδου και έλεγχος Κινούµενου Ανεστραµµένου Εκκρεµούς Θεωρείστε το σύστηµα του ανεστραµµένου εκκρεµούς-οχήµατος του Σχ. το οποίο περιγράφεται
ΨΣΕ 3 η Εργαστηριακή Άσκηση Γραµµικοποιήση µε ανατροφοδότηση εξόδου και έλεγχος Κινούµενου Ανεστραµµένου Εκκρεµούς Θεωρείστε το σύστηµα του ανεστραµµένου εκκρεµούς-οχήµατος του Σχ. το οποίο περιγράφεται
5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 5o Εργαστήριο Σ.Α.Ε Ενότητα : Ελεγκτές PID Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε
Εισαγωγή στην Τεχνολογία Αυτοματισμού
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 3: Μετασχηματισμός Laplace: Συνάρτηση μεταφοράς
Σήματα και Συστήματα. Διάλεξη 13: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 13: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace 1. Επίλυση Γραμμικών
Σήματα και Συστήματα Διάλεξη 13: Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Μελέτη ΓΧΑ Συστημάτων με τον Μετασχηματισμό Laplace 1. Επίλυση Γραμμικών
stopband Passband stopband H L H ( e h L (n) = 1 π = 1 h L (n) = sin ω cn
 = 1 π = 1 h L (n) = sin ω cn") Πανεπιστημιο Κυπρου Τμημα Ηλεκτρολογων Μηχανικων και Μηχανικων Υπολογιστων ΗΜΥ 22: Σηματα και Συστηματα για Μηχανικους Υπολογιστων Κεφάλαιο 7: Σχεδιασμός Φίλτρων!"#!"#! "#$% Σημειώσεις διαλέξεων στο: http://www.eg.ucy.ac.cy/chadcha/
Πανεπιστημιο Κυπρου Τμημα Ηλεκτρολογων Μηχανικων και Μηχανικων Υπολογιστων ΗΜΥ 22: Σηματα και Συστηματα για Μηχανικους Υπολογιστων Κεφάλαιο 7: Σχεδιασμός Φίλτρων!"#!"#! "#$% Σημειώσεις διαλέξεων στο: http://www.eg.ucy.ac.cy/chadcha/
Δειγματοληψία και ανακατασκευή αναλογικών σημάτων
 Δειγματοληψία και ανακατασκευή αναλογικών σημάτων, ή το φάσμα ενός ανα- Ο συνεχούς χρόνου μετασχηματισμός Fourier (CTFT), λογικού σήματος είναι X ( ω ) x (t) jω t X ω = x t e dt x ( ) ( ) = 1 j ω t e d
Δειγματοληψία και ανακατασκευή αναλογικών σημάτων, ή το φάσμα ενός ανα- Ο συνεχούς χρόνου μετασχηματισμός Fourier (CTFT), λογικού σήματος είναι X ( ω ) x (t) jω t X ω = x t e dt x ( ) ( ) = 1 j ω t e d
Βιομηχανικοί Ελεγκτές
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #13: Ψηφιακός Έλεγχος Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Βιομηχανικοί Ελεγκτές Ενότητα #13: Ψηφιακός Έλεγχος Κωνσταντίνος Αλαφοδήμος Τμήματος Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό
10 o Εργαστήριο Σ.Α.Ε
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 10 o Εργαστήριο Σ.Α.Ε Ενότητα: Μελέτη και Σχεδίαση Ψηφιακών Σ.Α.Ε με LABVIEW PID Tuning Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 10 o Εργαστήριο Σ.Α.Ε Ενότητα: Μελέτη και Σχεδίαση Ψηφιακών Σ.Α.Ε με LABVIEW PID Tuning Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης
ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεμβρίου 2008 ΕΠΩΝΥΜΟ (εξεταζόμενου/ης)
") 3 4 5 6 7 8 9 0 3 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεμβρίου 008 ΕΠΩΝΥΜΟ (εξεταζόμενου/ης) ΟΝΟΜΑ (εξεταζόμενου/ης) Αριθμός Μητρώου Έτος (π.χ. Γ,Δ,Ε,Ε,κ.λ.π.) Υπογραφή εξεταστή Υπογραφή
3 4 5 6 7 8 9 0 3 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεμβρίου 008 ΕΠΩΝΥΜΟ (εξεταζόμενου/ης) ΟΝΟΜΑ (εξεταζόμενου/ης) Αριθμός Μητρώου Έτος (π.χ. Γ,Δ,Ε,Ε,κ.λ.π.) Υπογραφή εξεταστή Υπογραφή
ΕΝΟΤΗΤΑ 12: ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ ΔΙΑΓΡΑΜΜΑΤΑ BODE
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ : ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ ΔΙΑΓΡΑΜΜΑΤΑ BODE Δρ Γιώργος Μαϊστρος, Χημικός Μηχανικός
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ : ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ ΔΙΑΓΡΑΜΜΑΤΑ BODE Δρ Γιώργος Μαϊστρος, Χημικός Μηχανικός
ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ 0: ΒΑΣΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΤΥΠΟΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Δρ Γιώργος
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑΙΟΥ ΣΧΟΛΗ ΕΠΙΣΤΗΜΩΝ ΤΗΣ ΔΙΟΙΚΗΣΗΣ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΟΙΚΟΝΟΜΙΑΣ ΚΑΙ ΔΙΟΙΚΗΣΗΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΕΝΟΤΗΤΑ 0: ΒΑΣΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΚΑΙ ΤΥΠΟΙ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Δρ Γιώργος
Εισαγωγή στον Αυτόματο Έλεγχο
 Εισαγωγή στον Αυτόματο Έλεγχο ΣΑΕ 2016-2017 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών Μηχανολόγων Μηχανικών Εθνικό
Εισαγωγή στον Αυτόματο Έλεγχο ΣΑΕ 2016-2017 Δρ Γ Παπαλάμπρου Επίκουρος Καθηγητής ΕΜΠ georgepapalambrou@lmentuagr Εργαστήριο Ναυτικής Μηχανολογίας (Κτίριο Λ) Σχολή Ναυπηγών Μηχανολόγων Μηχανικών Εθνικό
Ανάλυση και υπολογισμός του βρόχου φάσης (PLL). Β μέρος του Αθανάσιου Νασιόπουλου Τμήμα Ηλεκτρονικής ΤΕΙ Αθήνας
. Β μέρος του Αθανάσιου Νασιόπουλου Τμήμα Ηλεκτρονικής ΤΕΙ Αθήνας") Ανάλυση και υπολογισμός του βρόχου φάσης (PLL). Β μέρος του Αθανάσιου Νασιόπουλου Τμήμα Ηλεκτρονικής ΤΕΙ Αθήνας 1. Εισαγωγή Στο προηγούμενο μάθημα - εισήγηση αναλύθηκε ποιοτικά η λειτουργία του βρόχου
Ανάλυση και υπολογισμός του βρόχου φάσης (PLL). Β μέρος του Αθανάσιου Νασιόπουλου Τμήμα Ηλεκτρονικής ΤΕΙ Αθήνας 1. Εισαγωγή Στο προηγούμενο μάθημα - εισήγηση αναλύθηκε ποιοτικά η λειτουργία του βρόχου
Συστήματα Αυτομάτου Ελέγχου Ι Ασκήσεις Πράξης
 ΑΝΩΤΑΤΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΕΧΝΟΛΟΓΙΚΟΥ ΤΟΜΕΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Τ.Ε. ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Καθηγητής: Δ. ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Καθ. Εφαρμ:
ΑΝΩΤΑΤΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΕΧΝΟΛΟΓΙΚΟΥ ΤΟΜΕΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΜΗΧΑΝΙΚΩΝ ΑΥΤΟΜΑΤΙΣΜΟΥ Τ.Ε. ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Καθηγητής: Δ. ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Καθ. Εφαρμ:
Κυκλώματα με ημιτονοειδή διέγερση
 Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
Συστήματα Αυτομάτου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #5: Σχεδιασμός ελεγκτών με τη μέθοδο του Τόπου Ριζών 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #5: Σχεδιασμός ελεγκτών με τη μέθοδο του Τόπου Ριζών 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr Επ. Καθηγητής
Εισαγωγή στην Ανάλυση Συστηµάτων Αυτοµάτου Ελέγχου: Χρονική Απόκριση και Απόκριση Συχνότητας
 ΚΕΣ Αυτόµατος Έλεγχος Εισαγωγή στην Ανάλυση Συστηµάτων Αυτοµάτου Ελέγχου: Χρονική Απόκριση και Απόκριση Συχνότητας 6 Ncola Tapaoul Βιβλιογραφία Ενότητας Παρασκευόπουλος [5]: Κεφάλαιο 4 Παρασκευόπουλος
ΚΕΣ Αυτόµατος Έλεγχος Εισαγωγή στην Ανάλυση Συστηµάτων Αυτοµάτου Ελέγχου: Χρονική Απόκριση και Απόκριση Συχνότητας 6 Ncola Tapaoul Βιβλιογραφία Ενότητας Παρασκευόπουλος [5]: Κεφάλαιο 4 Παρασκευόπουλος
Άσκηση 3. Έλεγχος ανατροφοδότησης κατάστασης dc κινητήρα. Έλεγχος ανατροφοδότησης κατάστασης
 Άσκηση 3 Έλεγχος ανατροφοδότησης κατάστασης dc κινητήρα Έλεγχος ανατροφοδότησης κατάστασης Ένα γραμμικό χρονικά αμετάβλητο (LTI) σύστημα όπως γνωρίζουμε, μπορεί να περιγραφεί στο πεδίο του χρόνου μέσω
Άσκηση 3 Έλεγχος ανατροφοδότησης κατάστασης dc κινητήρα Έλεγχος ανατροφοδότησης κατάστασης Ένα γραμμικό χρονικά αμετάβλητο (LTI) σύστημα όπως γνωρίζουμε, μπορεί να περιγραφεί στο πεδίο του χρόνου μέσω
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 2015
 Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
Λύσεις θεμάτων εξεταστικής περιόδου Ιανουαρίου Φεβρουαρίου 205 ΘΕΜΑ Ο (2,0 μονάδες) Ο ηλεκτρικός θερμοσίφωνας χρησιμοποιείται για τη θέρμανση νερού σε μια προκαθορισμένη επιθυμητή θερμοκρασία (θερμοκρασία
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Χαρακτηριστικά των Συστημάτων Ελέγχου Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν
Χρήση του Simulation Interface Toolkit για την Εξομοίωση και Πειραματισμό Συστημάτων Αυτομάτου Ελέγχου
 Χρήση του Simulation Interface Toolkit για την Εξομοίωση και Πειραματισμό Συστημάτων Αυτομάτου Ελέγχου Γ. Νικολακόπουλος, Μ. Κουνδουράκης, Α. Τζες και Γ. Γεωργούλας Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων
Χρήση του Simulation Interface Toolkit για την Εξομοίωση και Πειραματισμό Συστημάτων Αυτομάτου Ελέγχου Γ. Νικολακόπουλος, Μ. Κουνδουράκης, Α. Τζες και Γ. Γεωργούλας Πανεπιστήμιο Πατρών Τμήμα Ηλεκτρολόγων
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα. 9o Εργαστήριο Σ.Α.Ε. Ενότητα : Έλεγχος Υδραυλικού Συστήματος
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 9o Εργαστήριο Σ.Α.Ε Ενότητα : Έλεγχος Υδραυλικού Συστήματος Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 9o Εργαστήριο Σ.Α.Ε Ενότητα : Έλεγχος Υδραυλικού Συστήματος Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Απόκριση Συχνότητας Αναλογικών Σ.Α.Ε Διαγράμματα BODE Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Απόκριση Συχνότητας Αναλογικών Σ.Α.Ε Διαγράμματα BODE Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες
Βαθµολογία Προβληµάτων ΘΕΜΑ 1 ΘΕΜΑ 2.1 ΘΕΜΑ 2.2 ΘΕΜΑ 2.3 ΘΕΜΑ 3.1 ΘΕΜΑ 3.2 ΘΕΜΑ 4 ΘΕΜΑ 5.1 ΘΕΜΑ 5.2. G(s)
") ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ 3 Σεπτεµβρίου 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεµβρίου 4 Να επιστραφεί η εκφώνηση των θεµάτων (υπογεγραµµένη από τον εξεταστή) ΕΠΩΝΥΜΟ
ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ 3 Σεπτεµβρίου 4 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Σεπτεµβρίου 4 Να επιστραφεί η εκφώνηση των θεµάτων (υπογεγραµµένη από τον εξεταστή) ΕΠΩΝΥΜΟ
Βαθμολογία Προβλημάτων ΘΕΜΑ 1 ΘΕΜΑ 2.1 ΘΕΜΑ 2.2 ΘΕΜΑ 2.3 ΘΕΜΑ 3.1 ΘΕΜΑ 3.2 ΘΕΜΑ 4 ΘΕΜΑ 5.1 ΘΕΜΑ 5.2
 1 4 5 6 7 8 9 10 11 1 1 14 ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ Ιουνίου 008 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Ιουνίου 008 Να επιστραφεί η εκφώνηση των θεμάτων (υπογεγραμμένη από
1 4 5 6 7 8 9 10 11 1 1 14 ΑΠΑΓΟΡΕΥΕΤΑΙ Η ΑΝΑΤΥΠΩΣΗ ΤΩΝ ΘΕΜΑΤΩΝ ΠΡΙΝ ΤΗΝ Ιουνίου 008 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ - Τελική εξέταση Ιουνίου 008 Να επιστραφεί η εκφώνηση των θεμάτων (υπογεγραμμένη από
ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ ΑΣΚΗΣΕΙΣ ΕΠΑΝΑΛΗΨΗΣ
 Τ.Ε.Ι. ΚΡΗΤΗΣ - ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ ΑΣΚΗΣΕΙΣ ΕΠΑΝΑΛΗΨΗΣ Μ. Σφακιωτάκης msfak@staff.teicrete.gr Χειµερινό εξάµηνο 18-19
Τ.Ε.Ι. ΚΡΗΤΗΣ - ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΠΑΡΑΓΩΓΗΣ, ΑΥΤΟΜΑΤΙΣΜΟΥ & ΡΟΜΠΟΤΙΚΗΣ ΔΥΝΑΜΙΚΗ & ΕΛΕΓΧΟΣ ΑΣΚΗΣΕΙΣ ΕΠΑΝΑΛΗΨΗΣ Μ. Σφακιωτάκης msfak@staff.teicrete.gr Χειµερινό εξάµηνο 18-19
Συστήματα Αυτομάτου Ελέγχου ΙΙ Γιώργος Σούλτης 167
 Προσομοίωση πραγματικών συστημάτων στο MATLAB Είδαμε μέχρι τώρα πως μπορούμε να υπολογίσουμε την συνάρτηση μεταφοράς σε πραγματικά συστήματα. Ο υπολογισμός της συνάρτησης μεταφοράς στη ουσία είναι η «γραμμικοποίηση»
Προσομοίωση πραγματικών συστημάτων στο MATLAB Είδαμε μέχρι τώρα πως μπορούμε να υπολογίσουμε την συνάρτηση μεταφοράς σε πραγματικά συστήματα. Ο υπολογισμός της συνάρτησης μεταφοράς στη ουσία είναι η «γραμμικοποίηση»
ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ
 ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ ΣΚΟΠΟΣ ΤΗΣ ΑΣΚΗΣΗΣ Σημαντική πληροφορία για τη συμπεριφορά και την ευστάθεια ενός γραμμικού συστήματος, παίρνεται, μελετώντας την απόκρισή του
ΑΠΟΚΡΙΣΗ ΣΥΣΤΗΜΑΤΩΝ ΣΤΟ ΠΕΔΙΟ ΤΟΥ ΧΡΟΝΟΥ ΚΑΙ ΤΩΝ ΣΥΧΝΟΤΗΤΩΝ ΣΚΟΠΟΣ ΤΗΣ ΑΣΚΗΣΗΣ Σημαντική πληροφορία για τη συμπεριφορά και την ευστάθεια ενός γραμμικού συστήματος, παίρνεται, μελετώντας την απόκρισή του
website:
 Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
Αλεξάνδρειο Τεχνολογικό Εκπαιδευτικό Ιδρυμα Θεσσαλονίκης Τμήμα Μηχανικών Αυτοματισμού Μαθηματική Μοντελοποίηση Αναγνώριση Συστημάτων Μαάιτα Τζαμάλ-Οδυσσέας 6 Μαρτίου 2017 1 Εισαγωγή Κάθε φυσικό σύστημα
(είσοδος) (έξοδος) καθώς το τείνει στο.
 (έξοδος) καθώς το τείνει στο.") Υπενθυμίζουμε ότι αν ένα σύστημα είναι ευσταθές, τότε η απόκριση είναι άθροισμα μίας μεταβατικής και μίας μόνιμης. Δηλαδή, αν το σύστημα είναι ευσταθές όπου και Είθισται, σε ένα σύστημα αυτομάτου ελέγχου
Υπενθυμίζουμε ότι αν ένα σύστημα είναι ευσταθές, τότε η απόκριση είναι άθροισμα μίας μεταβατικής και μίας μόνιμης. Δηλαδή, αν το σύστημα είναι ευσταθές όπου και Είθισται, σε ένα σύστημα αυτομάτου ελέγχου
ΕΛΕΓΚΤΕΣ PID. Ελεγκτής τριών όρων Η συνάρτηση μεταφοράς του PID ελεγκτή είναι η ακόλουθη:
 ΕΛΕΓΚΤΕΣ PID Εισαγωγή Αυτό το βοήθημα θα σας δείξει τα χαρακτηριστικά καθενός από τους τρεις ελέγχους ενός PID ελεγκτή, του αναλογικού (P), του ολοκληρωτικού (I) και του διαφορικού (D) ελέγχου, καθώς και
ΕΛΕΓΚΤΕΣ PID Εισαγωγή Αυτό το βοήθημα θα σας δείξει τα χαρακτηριστικά καθενός από τους τρεις ελέγχους ενός PID ελεγκτή, του αναλογικού (P), του ολοκληρωτικού (I) και του διαφορικού (D) ελέγχου, καθώς και
5.2 (α) Να γραφούν οι εξισώσεις βρόχων για το κύκλωμα του σχήματος Π5.2α. (β) Να γραφούν οι εξισώσεις κόμβων για το κύκλωμα του σχήματος Π5.
 Να γραφούν οι εξισώσεις βρόχων για το κύκλωμα του σχήματος Π5.2α. (β) Να γραφούν οι εξισώσεις κόμβων για το κύκλωμα του σχήματος Π5.") ΣΥΝΑΡΤΗΣΗ ΣΥΣΤΗΜΑΤΟΣ, ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ, ΠΡΟΣΟΜΟΙΩΣΗ 5. (α) Να βρεθεί η τιμή της σύνθετης αντίστασης Ζ(s) των τριών κυκλωμάτων στο σχήμα Π5. (β) Να βρεθούν οι πόλοι και τα μηδενικά της Ζ(s). (γ) Να βρεθεί
ΣΥΝΑΡΤΗΣΗ ΣΥΣΤΗΜΑΤΟΣ, ΑΠΟΚΡΙΣΗ ΣΥΧΝΟΤΗΤΑΣ, ΠΡΟΣΟΜΟΙΩΣΗ 5. (α) Να βρεθεί η τιμή της σύνθετης αντίστασης Ζ(s) των τριών κυκλωμάτων στο σχήμα Π5. (β) Να βρεθούν οι πόλοι και τα μηδενικά της Ζ(s). (γ) Να βρεθεί
Άσκηση 3. Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις
 Απαραίτητες γνώσεις") Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Άσκηση 3 Ποιοτική Μελέτη των νόμων ελέγχου δύο και τριών όρων (συσκευή: Προσομοιωτής ελέγχου PCS327: Σχ.1) Απαραίτητες γνώσεις 1) Αυτόματος έλεγχος δύο και τριών όρων 2) Εμπειρικαί μέθοδοι εκλογής των
Θ.Ε. ΠΛΗ22 ( ) 2η Γραπτή Εργασία
 2η Γραπτή Εργασία") Θ.Ε. ΠΛΗ22 (2012-13) 2η Γραπτή Εργασία Στόχος: Η 2 η εργασία αποσκοπεί στην κατανόηση των συστατικών στοιχείων των αναλογικών διαμορφώσεων, της δειγματοληψίας, και της μετατροπής του αναλογικού σήματος
Θ.Ε. ΠΛΗ22 (2012-13) 2η Γραπτή Εργασία Στόχος: Η 2 η εργασία αποσκοπεί στην κατανόηση των συστατικών στοιχείων των αναλογικών διαμορφώσεων, της δειγματοληψίας, και της μετατροπής του αναλογικού σήματος
Εισαγωγή στην Τεχνολογία Αυτοματισμού
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 4: Αποκρίσεις χαρακτηριστικών συστημάτων με
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΙΓΑIΟΥ & ΑΕΙ ΠΕΙΡΑΙΑ Τ.Τ. Τμήματα Ναυτιλίας και Επιχειρηματικών Υπηρεσιών & Μηχ. Αυτοματισμού ΤΕ Εισαγωγή στην Τεχνολογία Αυτοματισμού Ενότητα # 4: Αποκρίσεις χαρακτηριστικών συστημάτων με
Δυναμική Μηχανών I. Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις. Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές
 Δυναμική Μηχανών I Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις 5 3 Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com
Δυναμική Μηχανών I Επίλυση Προβλημάτων Αρχικών Συνθηκών σε Συνήθεις 5 3 Διαφορικές Εξισώσεις με Σταθερούς Συντελεστές 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com
ΚΕΦΑΛΑΙΟ 3 ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ. (α) Ο Διαδοχικός Έλεγχος (β) Ο Προσωτροφοδοτικός έλεγχος (γ) Τα Πολυμεταβλητά Συστήματα
 Ο Διαδοχικός Έλεγχος (β) Ο Προσωτροφοδοτικός έλεγχος (γ) Τα Πολυμεταβλητά Συστήματα") ΚΕΦΑΛΑΙΟ 3 ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ (α) Ο Διαδοχικός Έλεγχος (β) Ο Προσωτροφοδοτικός έλεγχος (γ) Τα Πολυμεταβλητά Συστήματα Διαδοχικός Έλεγχος Οι περιπτώσεις ελέγχου όπου η έξοδος ενός ελεγκτή προσαρμόζει
ΚΕΦΑΛΑΙΟ 3 ΠΡΟΗΓΜΕΝΑ ΣΥΣΤΗΜΑΤΑ ΕΛΕΓΧΟΥ (α) Ο Διαδοχικός Έλεγχος (β) Ο Προσωτροφοδοτικός έλεγχος (γ) Τα Πολυμεταβλητά Συστήματα Διαδοχικός Έλεγχος Οι περιπτώσεις ελέγχου όπου η έξοδος ενός ελεγκτή προσαρμόζει
Σύστημα και Μαθηματικά μοντέλα συστημάτων
 Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
Σύστημα και Μαθηματικά μοντέλα συστημάτων Όταν μελετούμε έναν συγκεκριμένο μηχανισμό η μια φυσική διεργασία επικεντρώνουμε το ενδιαφέρον μας στα φυσικά μεγέθη του μηχανισμού τα οποία μας ενδιαφέρει να
Συστήματα Αυτόματου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα Συστήματα Αυτόματου Ελέγχου Ενότητα : Ψηφιακός Έλεγχος Συστημάτων Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
Λύσεις θεμάτων εξεταστικής περιόδου Ιουνίου v 3 (t) - i 2 (t)
 - i 2 (t)") Λύσεις θεμάτων εξεταστικής περιόδου Ιουνίου 2015 ΘΕΜΑ 1 Ο (6,0 μονάδες) Δίνεται το κύκλωμα του σχήματος, όπου v 1 (t) είναι η είσοδος και v 3 (t) η έξοδος. Να θεωρήσετε μηδενικές αρχικές συνθήκες. v 1
Λύσεις θεμάτων εξεταστικής περιόδου Ιουνίου 2015 ΘΕΜΑ 1 Ο (6,0 μονάδες) Δίνεται το κύκλωμα του σχήματος, όπου v 1 (t) είναι η είσοδος και v 3 (t) η έξοδος. Να θεωρήσετε μηδενικές αρχικές συνθήκες. v 1
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα
 Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Αντίστροφος Μετασχηματισμός Laplace Στην
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Σερρών Τμήμα Πληροφορικής & Επικοινωνιών Σήματα και Συστήματα Δρ. Δημήτριος Ευσταθίου Επίκουρος Καθηγητής ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE Αντίστροφος Μετασχηματισμός Laplace Στην
NETCOM S.A. ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΠΑΛΜΟΜΕΤΑΤΡΟΠΕΩΝ DIGITAL CONTROL OF SWITCHING POWER CONVERTERS
 NETCOM S.A. ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΠΑΛΜΟΜΕΤΑΤΡΟΠΕΩΝ DIGITAL CONTROL OF SWITCHING POWER CONVERTERS Αρχή λειτουργίας των Αναλογικών και ψηφιακών Παλμομετατροπεων Ο παλμός οδήγησης ενός παλμομετατροπέα, με αναλογική
NETCOM S.A. ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΠΑΛΜΟΜΕΤΑΤΡΟΠΕΩΝ DIGITAL CONTROL OF SWITCHING POWER CONVERTERS Αρχή λειτουργίας των Αναλογικών και ψηφιακών Παλμομετατροπεων Ο παλμός οδήγησης ενός παλμομετατροπέα, με αναλογική
Δυναμική Μηχανών I. Διάλεξη 11. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 11 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Γραμμικοποίηση Ευστάθεια Απόκριση Συστημάτων 1 Β.Ε. που περιγράφονται από ΣΔΕ 1 ης τάξης 2 Πρόβλημα/Ερώτημα
Δυναμική Μηχανών I Διάλεξη 11 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Γραμμικοποίηση Ευστάθεια Απόκριση Συστημάτων 1 Β.Ε. που περιγράφονται από ΣΔΕ 1 ης τάξης 2 Πρόβλημα/Ερώτημα
ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ
 ΦΡΟΝΤΙΣΤΗΡΙΑΚΑ ΜΑΘΗΜΑΤΑ ΦΥΣΙΚΗΣ Π.Φ. ΜΟΙΡΑ 69 946778 ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ Συγγραφή Επιμέλεια: Παναγιώτης Φ. Μοίρας ΣΟΛΩΜΟΥ 9 - ΑΘΗΝΑ 69 946778 ΦΡΟΝΤΙΣΤΗΡΙΑΚΑ ΜΑΘΗΜΑΤΑ ΦΥΣΙΚΗΣ
ΦΡΟΝΤΙΣΤΗΡΙΑΚΑ ΜΑΘΗΜΑΤΑ ΦΥΣΙΚΗΣ Π.Φ. ΜΟΙΡΑ 69 946778 ΛΥΜΕΝΑ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΗΛΕΚΤΡΙΚΕΣ ΤΑΛΑΝΤΩΣΕΙΣ Συγγραφή Επιμέλεια: Παναγιώτης Φ. Μοίρας ΣΟΛΩΜΟΥ 9 - ΑΘΗΝΑ 69 946778 ΦΡΟΝΤΙΣΤΗΡΙΑΚΑ ΜΑΘΗΜΑΤΑ ΦΥΣΙΚΗΣ
ΘΕΜΑ 2 1. Υπολογίστε την σχέση των δύο αντιστάσεων, ώστε η συνάρτηση V
 Θέµατα εξετάσεων Θ. Κυκλωµάτων & Σηµάτων Σας προσφέρω τα περισσότερα θέµατα που έχουν τεθεί στις εξετάσεις τα τελευταία χρόνια ελπίζοντας ότι θα ασχοληθείτε µαζί τους κατά την προετοιµασία σας. Τα θέµατα
Θέµατα εξετάσεων Θ. Κυκλωµάτων & Σηµάτων Σας προσφέρω τα περισσότερα θέµατα που έχουν τεθεί στις εξετάσεις τα τελευταία χρόνια ελπίζοντας ότι θα ασχοληθείτε µαζί τους κατά την προετοιµασία σας. Τα θέµατα
Συστήματα Αυτομάτου Ελέγχου Ι Ασκήσεις Πράξης
 ΑΝΩΤΑΤΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΕΧΝΟΛΟΓΙΚΟΥ ΤΟΜΕΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Καθηγητς: Δ. ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Καθ. Εφαρμ: Σ. ΒΑΣΙΛΕΙΑΔΟΥ
ΑΝΩΤΑΤΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΠΕΙΡΑΙΑ ΤΕΧΝΟΛΟΓΙΚΟΥ ΤΟΜΕΑ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΚΩΝ ΕΦΑΡΜΟΓΩΝ ΤΜΗΜΑ ΑΥΤΟΜΑΤΙΣΜΟΥ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Ι ΑΣΚΗΣΕΙΣ ΠΡΑΞΗΣ Καθηγητς: Δ. ΔΗΜΟΓΙΑΝΝΟΠΟΥΛΟΣ Καθ. Εφαρμ: Σ. ΒΑΣΙΛΕΙΑΔΟΥ
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER
 4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
Συστήματα Αυτομάτου Ελέγχου
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #6: Σχεδιασμός ελεγκτών με χρήση αναλυτικής μεθόδου υπολογισμού παραμέτρων 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τ.Τ Συστήματα Αυτομάτου Ελέγχου Ενότητα #6: Σχεδιασμός ελεγκτών με χρήση αναλυτικής μεθόδου υπολογισμού παραμέτρων 2 Δ. Δημογιαννόπουλος, dimogian@teipir.gr
12 o Εργαστήριο Σ.Α.Ε
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 12 o Εργαστήριο Σ.Α.Ε Ενότητα: Προσομοίωση Σ.Α.Ε. με SIMULINK Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα 12 o Εργαστήριο Σ.Α.Ε Ενότητα: Προσομοίωση Σ.Α.Ε. με SIMULINK Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΑΣΚΗΣΕΙΣ ΣΤΑ ΚΥΚΛΩΜΑΤΑ 1 ης ΤΑΞΗΣ (Κεφ. 18)
") ΑΣΚΗΣΕΙΣ ΣΤΑ ΚΥΚΛΩΜΑΤΑ 1 ης ΤΑΞΗΣ (Κεφ. 18) Άσκηση 1. Α) Στο κύκλωμα του παρακάτω σχήματος την χρονική στιγμή t=0 sec ο διακόπτης κλείνει. Βρείτε τα v c και i c. Οι πυκνωτές είναι αρχικά αφόρτιστοι. Β)
ΑΣΚΗΣΕΙΣ ΣΤΑ ΚΥΚΛΩΜΑΤΑ 1 ης ΤΑΞΗΣ (Κεφ. 18) Άσκηση 1. Α) Στο κύκλωμα του παρακάτω σχήματος την χρονική στιγμή t=0 sec ο διακόπτης κλείνει. Βρείτε τα v c και i c. Οι πυκνωτές είναι αρχικά αφόρτιστοι. Β)
Δυναμική Μηχανών I. Διάλεξη 10. Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
 Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
Δυναμική Μηχανών I Διάλεξη 10 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1 Περιεχόμενα Προσομοίωση απόκρισης συστήματος στο MATLAB μέσω της συνάρτησης ode45 (Runge-Kutta) Προσομοίωση απόκρισης
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανολογίας
 Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανολογίας Μετρήσεις Τεχνικών Μεγεθών Τελική Εξέταση Ι (Ιουνίου Εαρινό Εξάμηνο 9 Πρόβλημα Α Ένας μηχανικός, με βάση τις μετρήσεις
Τεχνολογικό Εκπαιδευτικό Ίδρυμα Πειραιά Σχολή Τεχνολογικών Εφαρμογών Τμήμα Μηχανολογίας Μετρήσεις Τεχνικών Μεγεθών Τελική Εξέταση Ι (Ιουνίου Εαρινό Εξάμηνο 9 Πρόβλημα Α Ένας μηχανικός, με βάση τις μετρήσεις
ΑΝΑΛΥΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ ΜΕ ΤΟ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟ FOURIER
 ΑΝΑΛΥΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ ΜΕ ΤΟ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟ FOURIER Ανάλυση σημάτων και συστημάτων Ο μετασχηματισμός Fourier (DTFT και DFT) είναι σημαντικότατος για την ανάλυση σημάτων και συστημάτων Εντοπίζει
ΑΝΑΛΥΣΗ ΣΗΜΑΤΩΝ ΚΑΙ ΣΥΣΤΗΜΑΤΩΝ ΜΕ ΤΟ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟ FOURIER Ανάλυση σημάτων και συστημάτων Ο μετασχηματισμός Fourier (DTFT και DFT) είναι σημαντικότατος για την ανάλυση σημάτων και συστημάτων Εντοπίζει
Διακριτός Μετασχηματισμός Fourier
 Διακριτός Μετασχηματισμός Fourier 1 Διακριτός Μετασχηματισμός Fourier Ο μετασχηματισμός Fourier αποτελεί τον ακρογωνιαίο λίθο της επεξεργασίας σήματος αλλά και συχνή αιτία πονοκεφάλου για όσους πρωτοασχολούνται
Διακριτός Μετασχηματισμός Fourier 1 Διακριτός Μετασχηματισμός Fourier Ο μετασχηματισμός Fourier αποτελεί τον ακρογωνιαίο λίθο της επεξεργασίας σήματος αλλά και συχνή αιτία πονοκεφάλου για όσους πρωτοασχολούνται
Ημιτονοειδή σήματα Σ.Χ.
 Ημιτονοειδή σήματα Σ.Χ. Αρμονική ταλάντωση και επειδή Ω=2πF Περιοδικό με βασική περίοδο Τ p =1/F Ημιτονοειδή σήματα Σ.Χ. 1 Ημιτονοειδή σήματα Σ.Χ. Σύμφωνα με την ταυτότητα του Euler Το ημιτονοειδές σήμα
Ημιτονοειδή σήματα Σ.Χ. Αρμονική ταλάντωση και επειδή Ω=2πF Περιοδικό με βασική περίοδο Τ p =1/F Ημιτονοειδή σήματα Σ.Χ. 1 Ημιτονοειδή σήματα Σ.Χ. Σύμφωνα με την ταυτότητα του Euler Το ημιτονοειδές σήμα
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : Μετασχηματισμός LAPLACE (Laplace Tranform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα ΣΗΜΑΤΑ & ΣΥΣΤΗΜΑΤΑ Ενότητα : Μετασχηματισμός LAPLACE (Laplace Tranform) Aναστασία Βελώνη Τμήμα Η.Υ.Σ Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ ΣΧΕΔΙΑΣΗ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΑΣΚΗΣΗ 2
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΣΧΟΛΗ ΗΛΕΚΤΡΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΙ ΜΗΧΑΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΩΝ ΤΟΜΕΑΣ ΣΗΜΑΤΩΝ ΕΛΕΓΧΟΥ ΚΑΙ ΡΟΜΠΟΤΙΚΗΣ ΕΡΓΑΣΤΗΡΙΟ ΣΥΣΤΗΜΑΤΩΝ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΔΙΕΥΘΥΝΤΗΣ ΚΑΘΗΓΗΤΗΣ Γ.Π. ΠΑΠΑΒΑΣΙΛΟΠΟΥΛΟΣ
ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ ΙΙ
 Ύλη µαθήµατος. Lead-Lag ελεγκτές 2. PID ελεγκτές (95%) (εκτός διαγράµµατα Nyquist-Nichols) ιακριτός & Ψηφιακός Αυτόµατος Έλεγχος ΨΗΦΙΑΚΟΣ ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ Εργαστήριο Matlab LABview : συλλογή και αποστολή
Ύλη µαθήµατος. Lead-Lag ελεγκτές 2. PID ελεγκτές (95%) (εκτός διαγράµµατα Nyquist-Nichols) ιακριτός & Ψηφιακός Αυτόµατος Έλεγχος ΨΗΦΙΑΚΟΣ ΑΥΤΟΜΑΤΟΣ ΕΛΕΓΧΟΣ Εργαστήριο Matlab LABview : συλλογή και αποστολή
Δυναμική Μηχανών I. Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink
 Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Δυναμική Μηχανών I 5 6 Αριθμητική Επίλυση Δυναμικών Συστημάτων στο Περιβάλλον MATLAB και Simulink 2015 Δημήτριος Τζεράνης, Ph.D Τμήμα Μηχανολόγων Μηχανικών Ε.Μ.Π. tzeranis@gmail.com Απαγορεύεται οποιαδήποτε
Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο
 Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο Στο σχήμα φαίνεται μια γνώριμη διάταξη δύο παράλληλων αγωγών σε απόσταση, που ορίζουν οριζόντιο επίπεδο, κάθετο σε ομογενές μαγνητικό πεδίο έντασης.
Ηλεκτρική και Μηχανική ταλάντωση στο ίδιο φαινόμενο Στο σχήμα φαίνεται μια γνώριμη διάταξη δύο παράλληλων αγωγών σε απόσταση, που ορίζουν οριζόντιο επίπεδο, κάθετο σε ομογενές μαγνητικό πεδίο έντασης.
Εργαστηριακή ενότητα 3
 Εργαστηριακή ενότητα 3 Αναλογική προσομοίωση Αναλογικός Υπολογιστής Σκοπός των εργαστηριακών ασκήσεων Ο σκοπός των εργαστηριακών ασκήσεων της τρίτης νότητας είναι: Να κατανοήσουν οι φοιτητές τι είναι η
Εργαστηριακή ενότητα 3 Αναλογική προσομοίωση Αναλογικός Υπολογιστής Σκοπός των εργαστηριακών ασκήσεων Ο σκοπός των εργαστηριακών ασκήσεων της τρίτης νότητας είναι: Να κατανοήσουν οι φοιτητές τι είναι η
Μελέτη ευστάθειας και αστάθειας συστημάτων με το περιβάλλον Matlab
 ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Εργαστηριακές Ασκήσεις με χρήση του λογισμικού Matlab Μελέτη ευστάθειας και αστάθειας συστημάτων με το περιβάλλον Matlab ΣΚΟΠΟΣ: Ο βασικός σκοπός της άσκησης αυτής είναι η μελέτη
ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΟΥ ΕΛΕΓΧΟΥ Εργαστηριακές Ασκήσεις με χρήση του λογισμικού Matlab Μελέτη ευστάθειας και αστάθειας συστημάτων με το περιβάλλον Matlab ΣΚΟΠΟΣ: Ο βασικός σκοπός της άσκησης αυτής είναι η μελέτη
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης
 Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία
Η Βασική Δομή Συστημάτων Ελέγχου Κίνησης Σύστημα ονομάζουμε ένα σύνολο στοιχείων κατάλληλα συνδεδεμένων μεταξύ τους για να επιτελέσουν κάποιο έργο Είσοδο ονομάζουμε τη διέγερση, εντολή ή αιτία η οποία