Stabilized finite element for MHD with applications to magnetic confinement fusion
|
|
|
- Ευδοκία Κοσμόπουλος
- 8 χρόνια πριν
- Προβολές:
Transcript
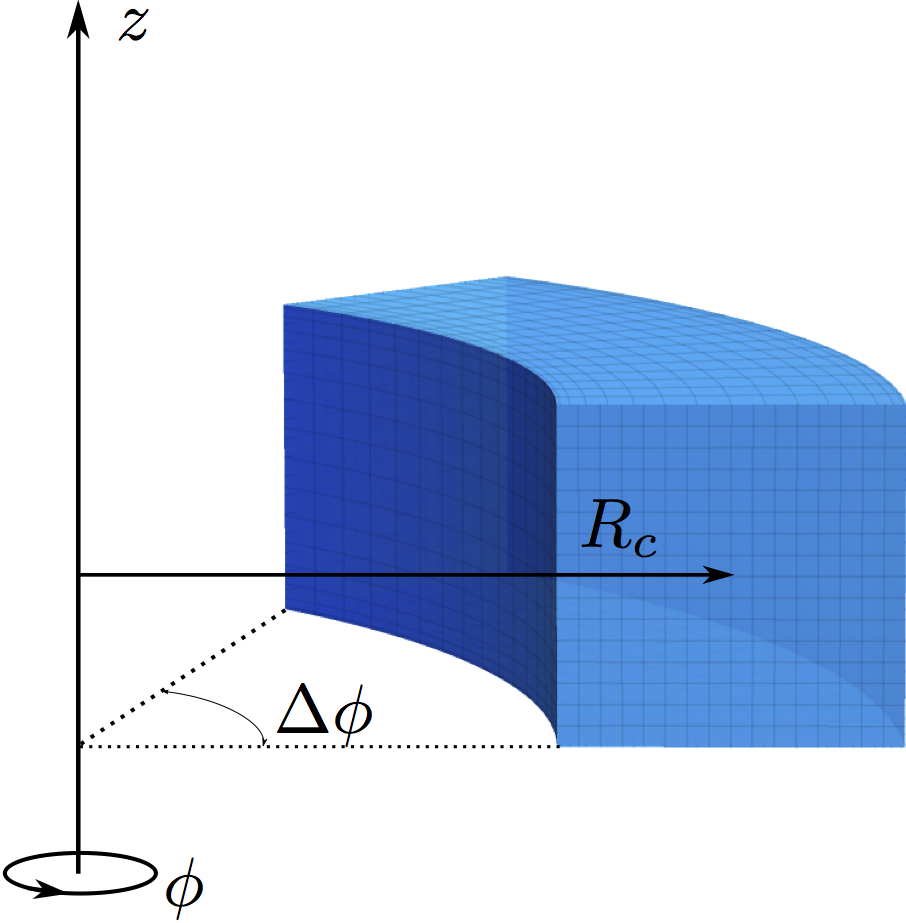
1 Stabilized finite element for MHD with applications to magnetic confinement fusion B. Nkonga 1 JAD/INRIA Nice Sophia-Antipolis Funded by ANR-MN-11 ANEMOS Workshop MNHP, Bordeaux Nov In collaboration with G. Huijsmans and M. Becoulet
2 Context

3 Context
4 Context
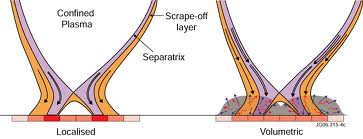
5 1 MHD modeling in the SOL 2 Taylor-Galerkin formulation: MHD and Reduced MHD 3 Applications
6 Fluid description of plasma : Assumptions Macroscopic velocity is small compared to the sound speed or magnetic speed (Alfen) [ ] [ ] γp b [v] [v] ρ ρ Deby lenght is small compared to characteristic system lenght: local electrical quasi-neutrality Te n e e 2 [x] Magnetic speed is small compared to light speed : negligible displacement current [ ] b c l ρ ν = ν ei ω b 1 where ω b = T e m e 1 q(r)r
7 Fluid description of plasma : MHD equations Rationalized Gaussian unit (c=1) Conservation of particles Conservation of momentum (ions + elect.) Conservation of energy (ions &/+ elect.) Faraday s law t ρ + m = m t m + (m v) + (pi + πi b b) = (τ + τ ) t E + ((E + p π) v + e b) + q = (( τ + τ ) v ) t b + e = 0 Conservation of elect. momentum (generalized Ohm s Law ) Ampere s law { e = v b + ηj + ẽ j = b
8 Fluid description of plasma : MHD equations Rationalized Gaussian unit (c=1) Spitzer 1956 : Ion Larmor radius [R i ] = ẽ = 1 n e e p i + m e n e e 2 tj + m i e tv [ẽ] = [R i ] [x] Ma + 1 ω p [t] + 1 ω l [t] 2mi [T i ] [b]e [ne]e 2 Plasma frequency ω p = m e Ion Larmor frequency ω l = [b]e m i Mach number Ma = [v] [c] For Equilibrium without flow Ma 1
9 MHD : Fluid description of plasma Conservative formulation : t ρ + m = m t m + (m v) + (pi + πi b b) = (τ + τ ) t E + ((E + p π) v + e b) + q = (( τ + τ ) v ) t b + e = 0 Closure relations : 1 m = ρv 2 E = ρε + ρ v v 2 + b b 2 3 p = (γ 1)ρε 4 π = b b 2 5 e = v b + ηj + ẽ 6 j = b ẽ contains the inductive applied electric field.
10 MHD : pressure formulation t ρ + m = m t m + (m v) + (pi + πi b b) = τ + τ t p + v p + ρc 2 v = (γ 1) q t b + e = 0
11 Constraint No magnetic monopole : b = 0 Divergence free current : j = 0 Potential Vector formulation b = a Implies that { { ( a) = 0 ( a) = 0 = h ( h a h ) = 0 h ( h h a h ) = 0 Constraints contains third order derivatives!
 ( h ( h ϕ) ) = 0 Implicit scheme for MHD instabilities")
12 Numerical Strategy : Jorek System of equations in compact form : t w = L (, w) C1-Finites elements ( h a h ) ( h ( h ϕ) ) = 0 Implicit scheme for MHD instabilities (Elm s).
13 Taylor Galerkin Principle of the TG Method (LW, Donea(84)) Formulate a high-order time-stepping scheme algorithm before the discretization of the spatial variable w n+1 = w n + δt ( t w) n (δt)2 ( 2 t w ) n (δt)3 ( 3 t w ) n + Substitute time derivatives by space derivatives: ( t w) n L (, w n ), ( k+1 t w ) n ( k t L (, w) ) n Solve the PDE with δw = w n+1 w n δw δt = L (, wn ) δt 2 ( tl (, w) ) n (δt)2 ( 2 6 t L (, w) ) n
14 Stabilization TG2/TG3 Ambrosi & Quartapelle JCP(98) w n+1 = w n + δt ( t w) n (δt)2 ( 2 t w ) n (δt)3 ( 3 t w ) w n+1 w n = δt ( t w) n (δt)2 ( 2 t w ) n (δt)3 ( 3 t w ) Approximation : ( t 3 w ) ( 2 3β t w ) n+1 ( 2 t w ) n δt General form : 0 θ 1 and 0 β 1 δw δt + θ ( L (, w n+1) L (, w n ) ) + δtξ l (( ) 2 t L) n+1 ( t L) n = L (, w n ) δtξ e 2 ( tl) n where ξ l = θ β and ξ e = 2θ 1.
15 Stabilization TG2/TG3 1 This is third order accurate only when β = Second order accurate for others values. Linear hyperbolic : L (, w) = (A ) w = a w t L (, w) = a ( tw) = 2 a w δw δt + θl (, w n+1) δtξ l 2 2 a a wn+1 = (θ 1)L (, w n ) + δt(ξ e ξ l ) 2 Crank-Nicolson scheme : θ = 1/2 and β = 1/2. In this case ξ l = ξ e = 0 2 a wn
16 Stabilization TG2/TG3 :Linearized hyperbolic component. L (, w) (A ) w + L re (, w). { ( t L) n+1 ( t L) n ( a R n+1 ) ( t L) n a (Rn ) 0 + a tw n 1 where R k+1 = ( t w) k + L (, w k+1) wk+1 w k t k+1 t k + L (, w k+1) δw δt + θ ( L (, w n+1) L (, w n ) ) δtξ l 2 ( a R n+1 ) = L (, w n ) + δtξ e 2 a (Rn )
17 Application to Full MHD t w+l (, w) = 0 with w = where L ρ (, w) = (ρv) (D ρ) ρ m p b, L (, w) = L ρ (, w) L m (, w) L p (, w) L b (, w) L m (, w) = (ρv v + pi + πi b b) + π ( ) L p (, w) = v p + γp v Γ (λ T ) + π : v + ηj j L b (, w) = e
18 Application to Full MHD We are concerned by plasmas dynamically dominated by ideal MHD pattern : L (, w) = L (, w) + L re (, w) with ( m ) m m L (, w) = ρ + pi + πi b b v ( p + γp v ) m b ρ b m ρ Then L (, w) = ÃA (w, ) w with 0 t 0 0 (v v) v + v (b ) t b ÃA (w, ) = γp ρ v γp ρ t v 0 vb bv b ρ ρ 0 v Taylor-Galerkin method is defined with A e = ÃA (w n e, )
19 Simplified semi-implicit and Implicit stabilizations = a ( i δtξ l δw a Rn+1 a δt and a Rn 0 ) δw 2 a δt + θl (, w n+1) = (1 θ) L (, w n )
20 Simplified semi-implicit and Implicit stabilizations The Harned and Kerner algorithm : θ = 0 and a = ÃA (w n, ) 0 t 0 0 δρ 0 0 (b ) t δt δtξ l δm 2 t ( δt ) = L ρ ( δm δt à (w, ) = δtξ l 2 δp δt + (bn ) t δb δt = L m ( ) γp δp 0 ρ t 0 0 δt δtξ l γp n 2 ρ t δm n δt = L p ( ( ) δb b 0 ρ 0 0 δt δtξ l b n δm 2 ρ n δt = L b ( Self consistent implicit scheme for the momentum: ( ( ) ) 2 δtξl i G (w n δm, ) 2 δt = L m (, w n ) δtξ l 2 K (, wn ) (1) where G (w n, ) is a self-adjoint (in (L 2 ) 3 ) linearized operator associated to ideal MHD ( ) ( ) γp G (w n n, ) = + (b n ) t 1 ρ n bn ρ n t
21 Ritz-Galerkin method for MHD. Approximated weak stabilized(taylor-galerkin) formulation t ρ h ρ h = L ρ,h (, w h ) ρ h δt t L ρ,h (, w h )ρ h 2 t m h m h = L m,h (, w h ) m h δt t L m,h (, w h ) m h 2 t E h Eh = L E,h (, w h ) Eh δt t L E,h (, w h )Eh 2 t b h b h = L b,h (, w h ) b h δt t L b,h (, w h )b h 2 Test functions : ρ h, m h, E h and b h. For any scalar variable defined over a domain Ω x, V h V h ( ) is the approximated space of function (of finite dimension) to be defined. Ritz-Galerkin formulation ρ h V h, m h (V h ) d, E h V h and b h (V h ) d ρ h V h, m h (V h ) d, Eh V h and b h (V h ) d What about the divergence free condition : b = 0?
22 Ritz-Galerkin method for MHD. Approximated weak stabilized(taylor-galerkin) formulation t ρ h ρ h = L ρ,h (, w h ) ρ h δt t L ρ,h (, w h )ρ h 2 t m h m h = L m,h (, w h ) m h δt t L m,h (, w h ) m h 2 t E h Eh = L E,h (, w h ) Eh δt t L E,h (, w h )Eh 2 t b h b h = L b,h (, w h ) b h δt t L b,h (, w h )b h 2 Ritz-Galerkin formulation ρ h V h, m h (V h ) d, E h V h and b h (V h ) d ρ h V h, m h (V h ) d, Eh V h and b h (V h ) d Ritz-Galerkin formulation with potential vector ρ h V h, m h (V h ) d, E h V h and b h F eq φ + (V h ) d ρ h V h, m h (V h ) d, E h V h and b h?? F eq φ + (V h ) d
 d m h V h b h V h r V h ẑz (V h")
23 Well Balanced scheme m h V h φ V h r V h ẑz (V h ) d m h V h b h V h r V h ẑz (V h ) d
24 Reduced Resistive MHD: b = F eq φ + (ψ φ) Therefore the induction equation becomes ( t ψ φ + e) = 0 so that t ψ φ + e = (F 0 u + u eq ) where F 0 (constant) is the scale of F eq e = v b + η (j j eq ) + u eq + ẽ Then v b = t ψ φ + η (j j eq ) + ẽ F 0 u Projections of this equation give: { t ψ = r2 F eq b (F 0 u η (j j eq ) ẽ ) v ϑb = 1 ( b b F 0 u η (j j eq ) ẽ t ψ φ ) b Tokamaks Scaling of the drift velocity: v ϑb r 2 u φ Why not v ϑb F 0 b b u b to enfore the relation b (v ϑb) = 0?
25 Reduced MHD : Elms Scale v = ϑb + r 2 u φ and b = F eq φ + (ψ φ) Ritz-Galerkin formulation for Reduced MHD ρ h and ρ h V h E h and E h V h m h and m h V h b h + r 2 V h φ b h F eq φ + V h φ and b h?? F eq φ + V h φ ( ) Simplified stabilization : a 2 τ ϑ where w = F eq r φw + [w, ψ] and w = r 2 [w, u]
26 Momentum equation : m h and m h V h b h + r 2 V h φ ( ϕb h ϕ φ ) 2 tl m,h (, w h ) ( (r 2 t m h + L m,h (, w h ) + δt ) ) 2 tl m,h (, w h ) t m h + L m,h (, w h ) + δt = 0 = 0 ϕ V h Conservative formulation 1 L m,h (, w h ) O h + β h β h = p h + π h 2 t L m,h (, w h ) t O h + t β h Tokamak scaling near equilibrium 1 β h = β h + 1 ɛ β h O h = ρ hv h v h 2 O h = O h + 1 ɛ O h O h = b h b h
27 Reduced MHD : Induction equation t ( ψ r 2 ) ϕ = φ ( e) ϕ formally implies, with j φ = ψ, that ( ) jφ t r 2 + φ ( e) = 0 ϕ V h
28 C1-Quadrangles Finite element (1) ϕ j (s, t) (2) ϕ j (s, t) (3) ϕ j (s, t) (4) ϕ j (s, t)

29 C1-Triangles Finite element
30 Tokamak s Equilibrium Ohm s Law e = v b + η (j j eq ) + u eq + ẽ It is often assumed that u eq 0 and ẽ 0. Grad-Shafranov Equilibrium: b eq = F eq φ + (ψ eq φ) where F eq F (ψ eq ) and p eq p (ψ eq ) are precribed functions, by solving ψ = F (ψ) F p (ψ) + r2 ψ ψ

31 Triangular mesh aligned with the magnetic surfaces. From Vtx and Elmt to 4000 Vtx and 8000 Elmt

32 Triangular mesh aligned with the magnetic surfaces.

33 Triangular mesh aligned with the magnetic surfaces.

34 Triangular mesh aligned with the magnetic surfaces.
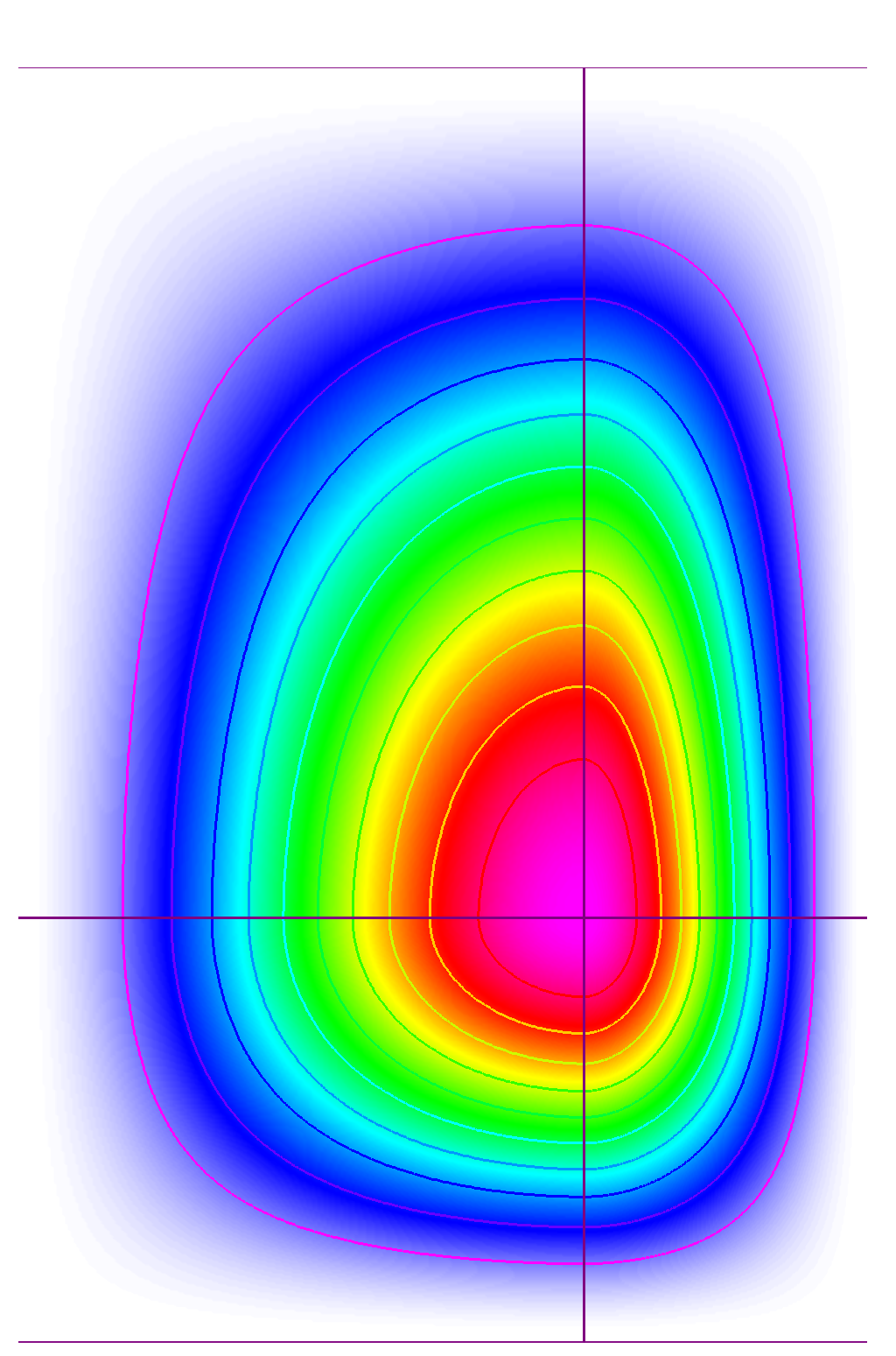
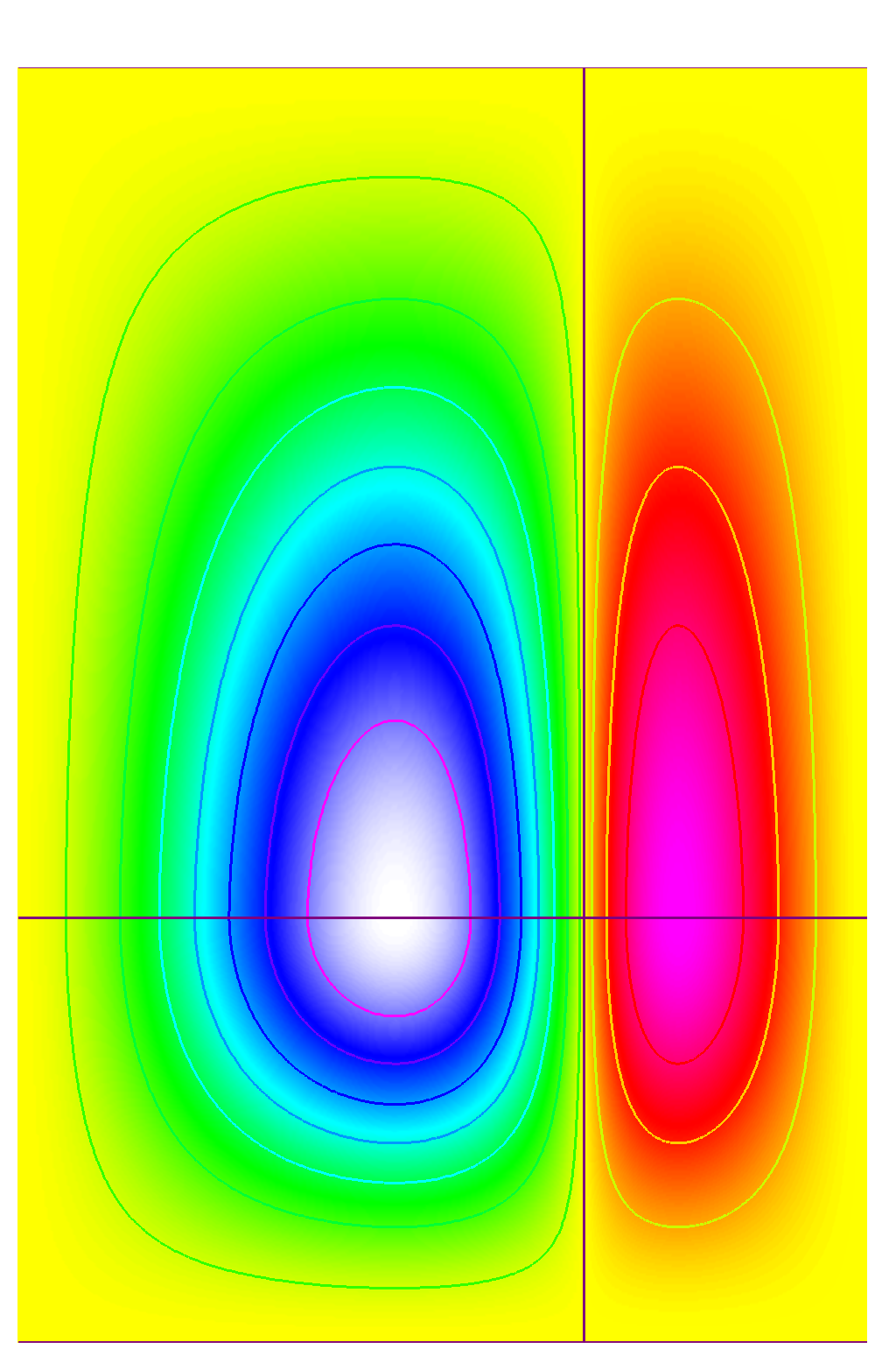
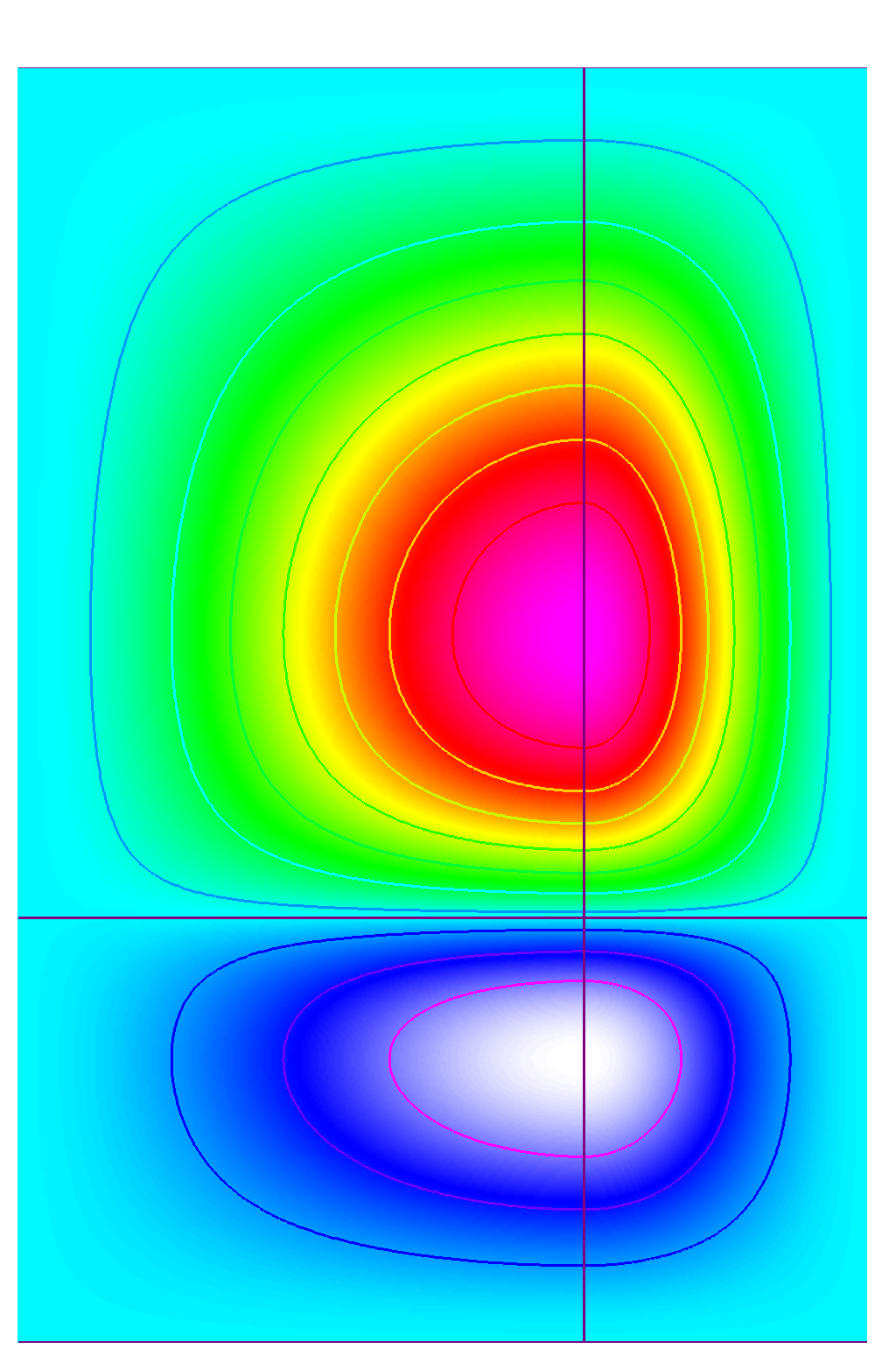
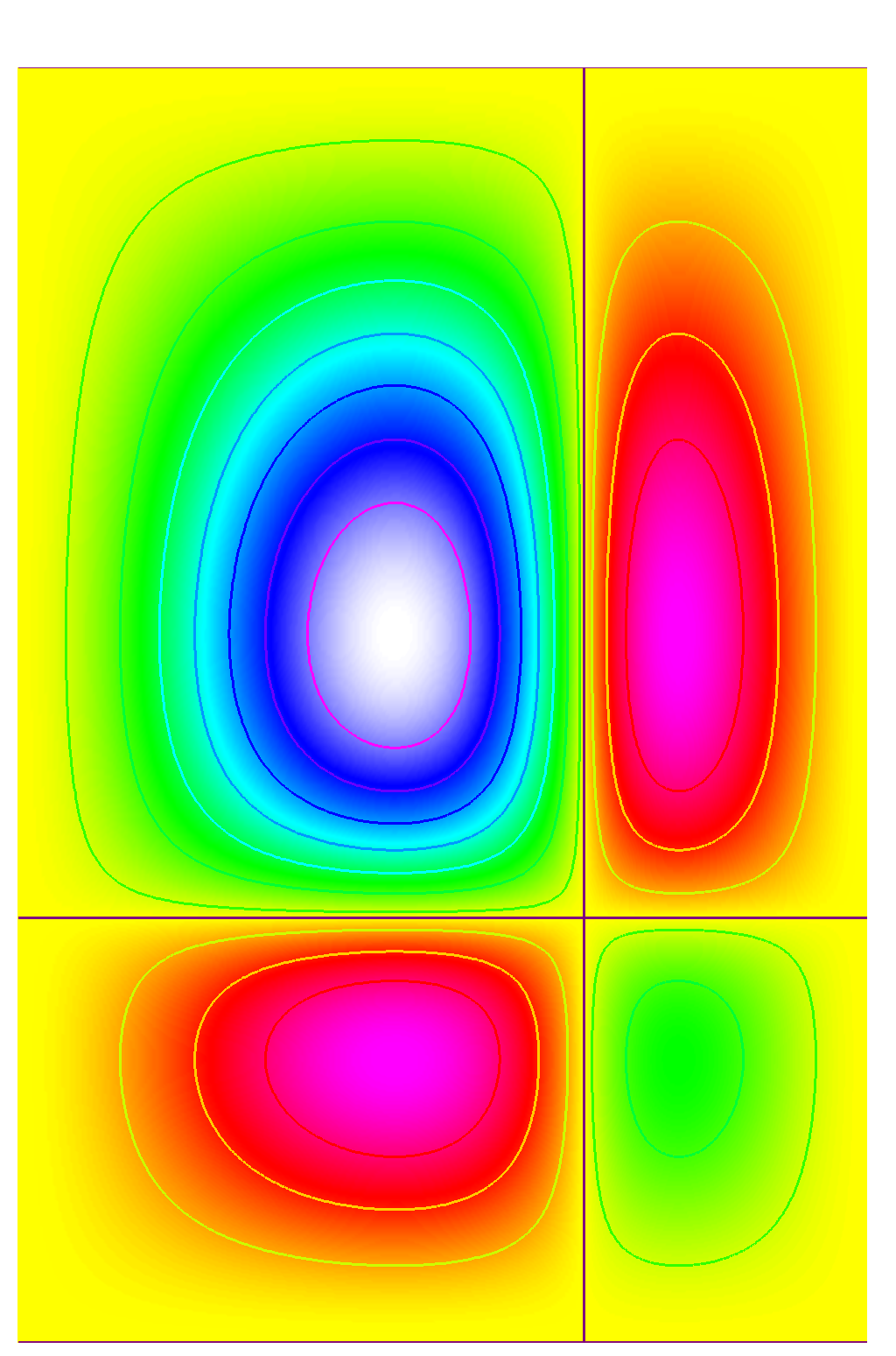
35 Internal kink Grow rate

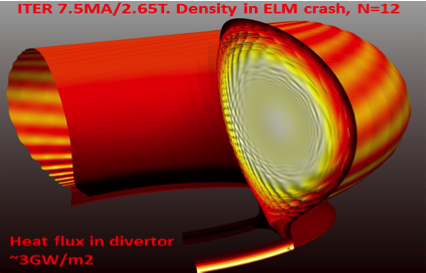
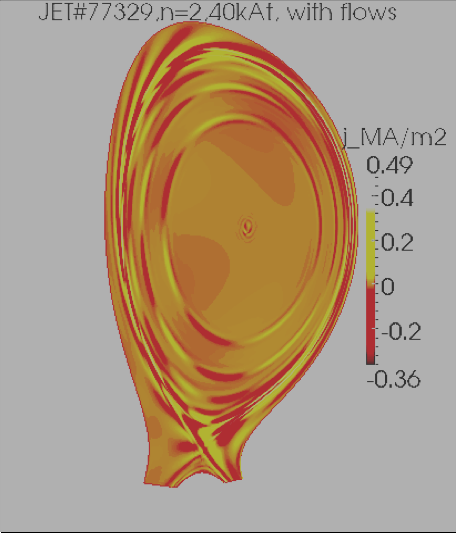
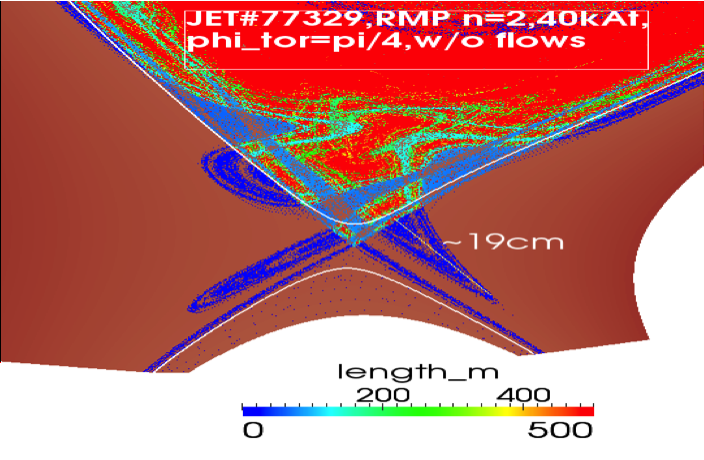
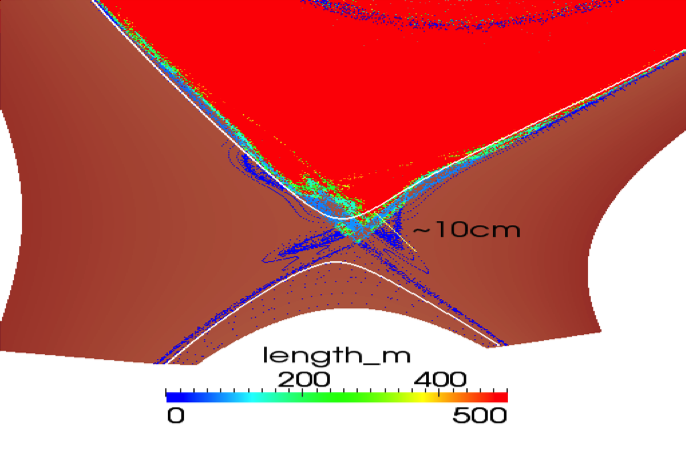
36 ELM s control by RMP.

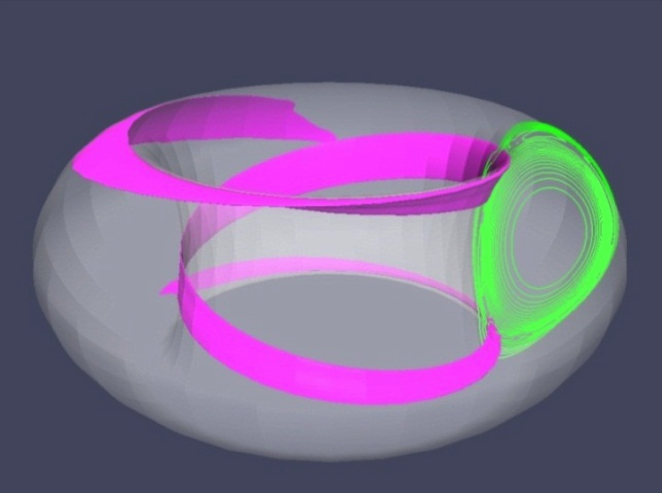
37 ELM s control by Pellet.
38 Conclusion Toroidal Finite Element Powell-Sabin Poloidal FE (Triangles) Improved Stabilization and Full MHD Modeling TR-BDF2 : second-order accurate and L-stable : lim δt 0 w n+1 w n = 0. Large-scale computations
Partial Differential Equations in Biology The boundary element method. March 26, 2013
 The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
The boundary element method March 26, 203 Introduction and notation The problem: u = f in D R d u = ϕ in Γ D u n = g on Γ N, where D = Γ D Γ N, Γ D Γ N = (possibly, Γ D = [Neumann problem] or Γ N = [Dirichlet
Jesse Maassen and Mark Lundstrom Purdue University November 25, 2013
 Notes on Average Scattering imes and Hall Factors Jesse Maassen and Mar Lundstrom Purdue University November 5, 13 I. Introduction 1 II. Solution of the BE 1 III. Exercises: Woring out average scattering
Notes on Average Scattering imes and Hall Factors Jesse Maassen and Mar Lundstrom Purdue University November 5, 13 I. Introduction 1 II. Solution of the BE 1 III. Exercises: Woring out average scattering
Space-Time Symmetries
 Chapter Space-Time Symmetries In classical fiel theory any continuous symmetry of the action generates a conserve current by Noether's proceure. If the Lagrangian is not invariant but only shifts by a
Chapter Space-Time Symmetries In classical fiel theory any continuous symmetry of the action generates a conserve current by Noether's proceure. If the Lagrangian is not invariant but only shifts by a
4.6 Autoregressive Moving Average Model ARMA(1,1)
") 84 CHAPTER 4. STATIONARY TS MODELS 4.6 Autoregressive Moving Average Model ARMA(,) This section is an introduction to a wide class of models ARMA(p,q) which we will consider in more detail later in this
84 CHAPTER 4. STATIONARY TS MODELS 4.6 Autoregressive Moving Average Model ARMA(,) This section is an introduction to a wide class of models ARMA(p,q) which we will consider in more detail later in this
Discretization of Generalized Convection-Diffusion
 Discretization of Generalized Convection-Diffusion H. Heumann R. Hiptmair Seminar für Angewandte Mathematik ETH Zürich Colloque Numérique Suisse / Schweizer Numerik Kolloquium 8 Generalized Convection-Diffusion
Discretization of Generalized Convection-Diffusion H. Heumann R. Hiptmair Seminar für Angewandte Mathematik ETH Zürich Colloque Numérique Suisse / Schweizer Numerik Kolloquium 8 Generalized Convection-Diffusion
Απόκριση σε Μοναδιαία Ωστική Δύναμη (Unit Impulse) Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο. Απόστολος Σ.
 Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο. Απόστολος Σ.") Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο The time integral of a force is referred to as impulse, is determined by and is obtained from: Newton s 2 nd Law of motion states that the action
Απόκριση σε Δυνάμεις Αυθαίρετα Μεταβαλλόμενες με το Χρόνο The time integral of a force is referred to as impulse, is determined by and is obtained from: Newton s 2 nd Law of motion states that the action
The Simply Typed Lambda Calculus
 Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
Type Inference Instead of writing type annotations, can we use an algorithm to infer what the type annotations should be? That depends on the type system. For simple type systems the answer is yes, and
forms This gives Remark 1. How to remember the above formulas: Substituting these into the equation we obtain with
 Week 03: C lassification of S econd- Order L inear Equations In last week s lectures we have illustrated how to obtain the general solutions of first order PDEs using the method of characteristics. We
Week 03: C lassification of S econd- Order L inear Equations In last week s lectures we have illustrated how to obtain the general solutions of first order PDEs using the method of characteristics. We
Eulerian Simulation of Large Deformations
 Eulerian Simulation of Large Deformations Shayan Hoshyari April, 2018 Some Applications 1 Biomechanical Engineering 2 / 11 Some Applications 1 Biomechanical Engineering 2 Muscle Animation 2 / 11 Some Applications
Eulerian Simulation of Large Deformations Shayan Hoshyari April, 2018 Some Applications 1 Biomechanical Engineering 2 / 11 Some Applications 1 Biomechanical Engineering 2 Muscle Animation 2 / 11 Some Applications
EE512: Error Control Coding
 EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
EE512: Error Control Coding Solution for Assignment on Finite Fields February 16, 2007 1. (a) Addition and Multiplication tables for GF (5) and GF (7) are shown in Tables 1 and 2. + 0 1 2 3 4 0 0 1 2 3
the total number of electrons passing through the lamp.
 1. A 12 V 36 W lamp is lit to normal brightness using a 12 V car battery of negligible internal resistance. The lamp is switched on for one hour (3600 s). For the time of 1 hour, calculate (i) the energy
1. A 12 V 36 W lamp is lit to normal brightness using a 12 V car battery of negligible internal resistance. The lamp is switched on for one hour (3600 s). For the time of 1 hour, calculate (i) the energy
Concrete Mathematics Exercises from 30 September 2016
 Concrete Mathematics Exercises from 30 September 2016 Silvio Capobianco Exercise 1.7 Let H(n) = J(n + 1) J(n). Equation (1.8) tells us that H(2n) = 2, and H(2n+1) = J(2n+2) J(2n+1) = (2J(n+1) 1) (2J(n)+1)
Concrete Mathematics Exercises from 30 September 2016 Silvio Capobianco Exercise 1.7 Let H(n) = J(n + 1) J(n). Equation (1.8) tells us that H(2n) = 2, and H(2n+1) = J(2n+2) J(2n+1) = (2J(n+1) 1) (2J(n)+1)
HOMEWORK 4 = G. In order to plot the stress versus the stretch we define a normalized stretch:
 HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
HOMEWORK 4 Problem a For the fast loading case, we want to derive the relationship between P zz and λ z. We know that the nominal stress is expressed as: P zz = ψ λ z where λ z = λ λ z. Therefore, applying
Differential equations
 Differential equations Differential equations: An equation inoling one dependent ariable and its deriaties w. r. t one or more independent ariables is called a differential equation. Order of differential
Differential equations Differential equations: An equation inoling one dependent ariable and its deriaties w. r. t one or more independent ariables is called a differential equation. Order of differential
6.1. Dirac Equation. Hamiltonian. Dirac Eq.
 6.1. Dirac Equation Ref: M.Kaku, Quantum Field Theory, Oxford Univ Press (1993) η μν = η μν = diag(1, -1, -1, -1) p 0 = p 0 p = p i = -p i p μ p μ = p 0 p 0 + p i p i = E c 2 - p 2 = (m c) 2 H = c p 2
6.1. Dirac Equation Ref: M.Kaku, Quantum Field Theory, Oxford Univ Press (1993) η μν = η μν = diag(1, -1, -1, -1) p 0 = p 0 p = p i = -p i p μ p μ = p 0 p 0 + p i p i = E c 2 - p 2 = (m c) 2 H = c p 2
High order interpolation function for surface contact problem
 3 016 5 Journal of East China Normal University Natural Science No 3 May 016 : 1000-564101603-0009-1 1 1 1 00444; E- 00030 : Lagrange Lobatto Matlab : ; Lagrange; : O41 : A DOI: 103969/jissn1000-56410160300
3 016 5 Journal of East China Normal University Natural Science No 3 May 016 : 1000-564101603-0009-1 1 1 1 00444; E- 00030 : Lagrange Lobatto Matlab : ; Lagrange; : O41 : A DOI: 103969/jissn1000-56410160300
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3
 Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
Lecture 2: Dirac notation and a review of linear algebra Read Sakurai chapter 1, Baym chatper 3 1 State vector space and the dual space Space of wavefunctions The space of wavefunctions is the set of all
Derivation of Optical-Bloch Equations
 Appendix C Derivation of Optical-Bloch Equations In this appendix the optical-bloch equations that give the populations and coherences for an idealized three-level Λ system, Fig. 3. on page 47, will be
Appendix C Derivation of Optical-Bloch Equations In this appendix the optical-bloch equations that give the populations and coherences for an idealized three-level Λ system, Fig. 3. on page 47, will be
Second Order Partial Differential Equations
 Chapter 7 Second Order Partial Differential Equations 7.1 Introduction A second order linear PDE in two independent variables (x, y Ω can be written as A(x, y u x + B(x, y u xy + C(x, y u u u + D(x, y
Chapter 7 Second Order Partial Differential Equations 7.1 Introduction A second order linear PDE in two independent variables (x, y Ω can be written as A(x, y u x + B(x, y u xy + C(x, y u u u + D(x, y
Appendix A. Curvilinear coordinates. A.1 Lamé coefficients. Consider set of equations. ξ i = ξ i (x 1,x 2,x 3 ), i = 1,2,3
, i = 1,2,3") Appendix A Curvilinear coordinates A. Lamé coefficients Consider set of equations ξ i = ξ i x,x 2,x 3, i =,2,3 where ξ,ξ 2,ξ 3 independent, single-valued and continuous x,x 2,x 3 : coordinates of point
Appendix A Curvilinear coordinates A. Lamé coefficients Consider set of equations ξ i = ξ i x,x 2,x 3, i =,2,3 where ξ,ξ 2,ξ 3 independent, single-valued and continuous x,x 2,x 3 : coordinates of point
Forced Pendulum Numerical approach
 Numerical approach UiO April 8, 2014 Physical problem and equation We have a pendulum of length l, with mass m. The pendulum is subject to gravitation as well as both a forcing and linear resistance force.
Numerical approach UiO April 8, 2014 Physical problem and equation We have a pendulum of length l, with mass m. The pendulum is subject to gravitation as well as both a forcing and linear resistance force.
The kinetic and potential energies as T = 1 2. (m i η2 i k(η i+1 η i ) 2 ). (3) The Hooke s law F = Y ξ, (6) with a discrete analog
 2 ). (3) The Hooke s law F = Y ξ, (6) with a discrete analog") Lecture 12: Introduction to Analytical Mechanics of Continuous Systems Lagrangian Density for Continuous Systems The kinetic and potential energies as T = 1 2 i η2 i (1 and V = 1 2 i+1 η i 2, i (2 where
Lecture 12: Introduction to Analytical Mechanics of Continuous Systems Lagrangian Density for Continuous Systems The kinetic and potential energies as T = 1 2 i η2 i (1 and V = 1 2 i+1 η i 2, i (2 where
Example Sheet 3 Solutions
 Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
Example Sheet 3 Solutions. i Regular Sturm-Liouville. ii Singular Sturm-Liouville mixed boundary conditions. iii Not Sturm-Liouville ODE is not in Sturm-Liouville form. iv Regular Sturm-Liouville note
Phys460.nb Solution for the t-dependent Schrodinger s equation How did we find the solution? (not required)
") Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
Phys460.nb 81 ψ n (t) is still the (same) eigenstate of H But for tdependent H. The answer is NO. 5.5.5. Solution for the tdependent Schrodinger s equation If we assume that at time t 0, the electron starts
Appendix to On the stability of a compressible axisymmetric rotating flow in a pipe. By Z. Rusak & J. H. Lee
 Appendi to On the stability of a compressible aisymmetric rotating flow in a pipe By Z. Rusak & J. H. Lee Journal of Fluid Mechanics, vol. 5 4, pp. 5 4 This material has not been copy-edited or typeset
Appendi to On the stability of a compressible aisymmetric rotating flow in a pipe By Z. Rusak & J. H. Lee Journal of Fluid Mechanics, vol. 5 4, pp. 5 4 This material has not been copy-edited or typeset
Reminders: linear functions
 Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
Reminders: linear functions Let U and V be vector spaces over the same field F. Definition A function f : U V is linear if for every u 1, u 2 U, f (u 1 + u 2 ) = f (u 1 ) + f (u 2 ), and for every u U
Section 8.3 Trigonometric Equations
 99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
99 Section 8. Trigonometric Equations Objective 1: Solve Equations Involving One Trigonometric Function. In this section and the next, we will exple how to solving equations involving trigonometric functions.
Inverse trigonometric functions & General Solution of Trigonometric Equations. ------------------ ----------------------------- -----------------
 Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
Inverse trigonometric functions & General Solution of Trigonometric Equations. 1. Sin ( ) = a) b) c) d) Ans b. Solution : Method 1. Ans a: 17 > 1 a) is rejected. w.k.t Sin ( sin ) = d is rejected. If sin
ES440/ES911: CFD. Chapter 5. Solution of Linear Equation Systems
 ES440/ES911: CFD Chapter 5. Solution of Linear Equation Systems Dr Yongmann M. Chung http://www.eng.warwick.ac.uk/staff/ymc/es440.html Y.M.Chung@warwick.ac.uk School of Engineering & Centre for Scientific
ES440/ES911: CFD Chapter 5. Solution of Linear Equation Systems Dr Yongmann M. Chung http://www.eng.warwick.ac.uk/staff/ymc/es440.html Y.M.Chung@warwick.ac.uk School of Engineering & Centre for Scientific
Discontinuous Hermite Collocation and Diagonally Implicit RK3 for a Brain Tumour Invasion Model
 1 Discontinuous Hermite Collocation and Diagonally Implicit RK3 for a Brain Tumour Invasion Model John E. Athanasakis Applied Mathematics & Computers Laboratory Technical University of Crete Chania 73100,
1 Discontinuous Hermite Collocation and Diagonally Implicit RK3 for a Brain Tumour Invasion Model John E. Athanasakis Applied Mathematics & Computers Laboratory Technical University of Crete Chania 73100,
( y) Partial Differential Equations
 Partial Differential Equations") Partial Dierential Equations Linear P.D.Es. contains no owers roducts o the deendent variables / an o its derivatives can occasionall be solved. Consider eamle ( ) a (sometimes written as a ) we can integrate
Partial Dierential Equations Linear P.D.Es. contains no owers roducts o the deendent variables / an o its derivatives can occasionall be solved. Consider eamle ( ) a (sometimes written as a ) we can integrate
Lifting Entry (continued)
") ifting Entry (continued) Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion Planar state equations MARYAN 1 01 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu
ifting Entry (continued) Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion Planar state equations MARYAN 1 01 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Lecture 21: Scattering and FGR
 ECE-656: Fall 009 Lecture : Scattering and FGR Professor Mark Lundstrom Electrical and Computer Engineering Purdue University, West Lafayette, IN USA Review: characteristic times τ ( p), (, ) == S p p
ECE-656: Fall 009 Lecture : Scattering and FGR Professor Mark Lundstrom Electrical and Computer Engineering Purdue University, West Lafayette, IN USA Review: characteristic times τ ( p), (, ) == S p p
DESIGN OF MACHINERY SOLUTION MANUAL h in h 4 0.
 DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
DESIGN OF MACHINERY SOLUTION MANUAL -7-1! PROBLEM -7 Statement: Design a double-dwell cam to move a follower from to 25 6, dwell for 12, fall 25 and dwell for the remader The total cycle must take 4 sec
Second Order RLC Filters
 ECEN 60 Circuits/Electronics Spring 007-0-07 P. Mathys Second Order RLC Filters RLC Lowpass Filter A passive RLC lowpass filter (LPF) circuit is shown in the following schematic. R L C v O (t) Using phasor
ECEN 60 Circuits/Electronics Spring 007-0-07 P. Mathys Second Order RLC Filters RLC Lowpass Filter A passive RLC lowpass filter (LPF) circuit is shown in the following schematic. R L C v O (t) Using phasor
Finite difference method for 2-D heat equation
 Finite difference method for 2-D heat equation Praveen. C praveen@math.tifrbng.res.in Tata Institute of Fundamental Research Center for Applicable Mathematics Bangalore 560065 http://math.tifrbng.res.in/~praveen
Finite difference method for 2-D heat equation Praveen. C praveen@math.tifrbng.res.in Tata Institute of Fundamental Research Center for Applicable Mathematics Bangalore 560065 http://math.tifrbng.res.in/~praveen
Finite Field Problems: Solutions
 Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
Finite Field Problems: Solutions 1. Let f = x 2 +1 Z 11 [x] and let F = Z 11 [x]/(f), a field. Let Solution: F =11 2 = 121, so F = 121 1 = 120. The possible orders are the divisors of 120. Solution: The
Wavelet based matrix compression for boundary integral equations on complex geometries
 1 Wavelet based matrix compression for boundary integral equations on complex geometries Ulf Kähler Chemnitz University of Technology Workshop on Fast Boundary Element Methods in Industrial Applications
1 Wavelet based matrix compression for boundary integral equations on complex geometries Ulf Kähler Chemnitz University of Technology Workshop on Fast Boundary Element Methods in Industrial Applications
C.S. 430 Assignment 6, Sample Solutions
 C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
C.S. 430 Assignment 6, Sample Solutions Paul Liu November 15, 2007 Note that these are sample solutions only; in many cases there were many acceptable answers. 1 Reynolds Problem 10.1 1.1 Normal-order
Higher Derivative Gravity Theories
 Higher Derivative Gravity Theories Black Holes in AdS space-times James Mashiyane Supervisor: Prof Kevin Goldstein University of the Witwatersrand Second Mandelstam, 20 January 2018 James Mashiyane WITS)
Higher Derivative Gravity Theories Black Holes in AdS space-times James Mashiyane Supervisor: Prof Kevin Goldstein University of the Witwatersrand Second Mandelstam, 20 January 2018 James Mashiyane WITS)
Module 5. February 14, h 0min
 Module 5 Stationary Time Series Models Part 2 AR and ARMA Models and Their Properties Class notes for Statistics 451: Applied Time Series Iowa State University Copyright 2015 W. Q. Meeker. February 14,
Module 5 Stationary Time Series Models Part 2 AR and ARMA Models and Their Properties Class notes for Statistics 451: Applied Time Series Iowa State University Copyright 2015 W. Q. Meeker. February 14,
D Alembert s Solution to the Wave Equation
 D Alembert s Solution to the Wave Equation MATH 467 Partial Differential Equations J. Robert Buchanan Department of Mathematics Fall 2018 Objectives In this lesson we will learn: a change of variable technique
D Alembert s Solution to the Wave Equation MATH 467 Partial Differential Equations J. Robert Buchanan Department of Mathematics Fall 2018 Objectives In this lesson we will learn: a change of variable technique
Global nonlinear stability of steady solutions of the 3-D incompressible Euler equations with helical symmetry and with no swirl
 Around Vortices: from Cont. to Quantum Mech. Global nonlinear stability of steady solutions of the 3-D incompressible Euler equations with helical symmetry and with no swirl Maicon José Benvenutti (UNICAMP)
Around Vortices: from Cont. to Quantum Mech. Global nonlinear stability of steady solutions of the 3-D incompressible Euler equations with helical symmetry and with no swirl Maicon José Benvenutti (UNICAMP)
Chapter 6: Systems of Linear Differential. be continuous functions on the interval
 Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
w o = R 1 p. (1) R = p =. = 1
 R = p =. = 1") Πανεπιστήµιο Κρήτης - Τµήµα Επιστήµης Υπολογιστών ΗΥ-570: Στατιστική Επεξεργασία Σήµατος 205 ιδάσκων : Α. Μουχτάρης Τριτη Σειρά Ασκήσεων Λύσεις Ασκηση 3. 5.2 (a) From the Wiener-Hopf equation we have:
Πανεπιστήµιο Κρήτης - Τµήµα Επιστήµης Υπολογιστών ΗΥ-570: Στατιστική Επεξεργασία Σήµατος 205 ιδάσκων : Α. Μουχτάρης Τριτη Σειρά Ασκήσεων Λύσεις Ασκηση 3. 5.2 (a) From the Wiener-Hopf equation we have:
SCHOOL OF MATHEMATICAL SCIENCES G11LMA Linear Mathematics Examination Solutions
 SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
SCHOOL OF MATHEMATICAL SCIENCES GLMA Linear Mathematics 00- Examination Solutions. (a) i. ( + 5i)( i) = (6 + 5) + (5 )i = + i. Real part is, imaginary part is. (b) ii. + 5i i ( + 5i)( + i) = ( i)( + i)
wave energy Superposition of linear plane progressive waves Marine Hydrodynamics Lecture Oblique Plane Waves:
 3.0 Marine Hydrodynamics, Fall 004 Lecture 0 Copyriht c 004 MIT - Department of Ocean Enineerin, All rihts reserved. 3.0 - Marine Hydrodynamics Lecture 0 Free-surface waves: wave enery linear superposition,
3.0 Marine Hydrodynamics, Fall 004 Lecture 0 Copyriht c 004 MIT - Department of Ocean Enineerin, All rihts reserved. 3.0 - Marine Hydrodynamics Lecture 0 Free-surface waves: wave enery linear superposition,
Major Concepts. Multiphase Equilibrium Stability Applications to Phase Equilibrium. Two-Phase Coexistence
 Major Concepts Multiphase Equilibrium Stability Applications to Phase Equilibrium Phase Rule Clausius-Clapeyron Equation Special case of Gibbs-Duhem wo-phase Coexistence Criticality Metastability Spinodal
Major Concepts Multiphase Equilibrium Stability Applications to Phase Equilibrium Phase Rule Clausius-Clapeyron Equation Special case of Gibbs-Duhem wo-phase Coexistence Criticality Metastability Spinodal
Lecture 2. Soundness and completeness of propositional logic
 Lecture 2 Soundness and completeness of propositional logic February 9, 2004 1 Overview Review of natural deduction. Soundness and completeness. Semantics of propositional formulas. Soundness proof. Completeness
Lecture 2 Soundness and completeness of propositional logic February 9, 2004 1 Overview Review of natural deduction. Soundness and completeness. Semantics of propositional formulas. Soundness proof. Completeness
Homework 3 Solutions
 Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
Homework 3 Solutions Igor Yanovsky (Math 151A TA) Problem 1: Compute the absolute error and relative error in approximations of p by p. (Use calculator!) a) p π, p 22/7; b) p π, p 3.141. Solution: For
Ordinal Arithmetic: Addition, Multiplication, Exponentiation and Limit
 Ordinal Arithmetic: Addition, Multiplication, Exponentiation and Limit Ting Zhang Stanford May 11, 2001 Stanford, 5/11/2001 1 Outline Ordinal Classification Ordinal Addition Ordinal Multiplication Ordinal
Ordinal Arithmetic: Addition, Multiplication, Exponentiation and Limit Ting Zhang Stanford May 11, 2001 Stanford, 5/11/2001 1 Outline Ordinal Classification Ordinal Addition Ordinal Multiplication Ordinal
CHAPTER 25 SOLVING EQUATIONS BY ITERATIVE METHODS
 CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
CHAPTER 5 SOLVING EQUATIONS BY ITERATIVE METHODS EXERCISE 104 Page 8 1. Find the positive root of the equation x + 3x 5 = 0, correct to 3 significant figures, using the method of bisection. Let f(x) =
(As on April 16, 2002 no changes since Dec 24.)
") ~rprice/area51/documents/roswell.tex ROSWELL COORDINATES FOR TWO CENTERS As on April 16, 00 no changes since Dec 4. I. Definitions of coordinates We define the Roswell coordinates χ, Θ. A better name will
~rprice/area51/documents/roswell.tex ROSWELL COORDINATES FOR TWO CENTERS As on April 16, 00 no changes since Dec 4. I. Definitions of coordinates We define the Roswell coordinates χ, Θ. A better name will
Every set of first-order formulas is equivalent to an independent set
 Every set of first-order formulas is equivalent to an independent set May 6, 2008 Abstract A set of first-order formulas, whatever the cardinality of the set of symbols, is equivalent to an independent
Every set of first-order formulas is equivalent to an independent set May 6, 2008 Abstract A set of first-order formulas, whatever the cardinality of the set of symbols, is equivalent to an independent
Treatment of Boundary Conditions. Advanced CFD 03
 Treatment of Boundary Conditions Advanced CFD 03 Momentum BCs ( ρv) ( ρvv) = τ p B t semi-discretized form ( ρv) ( ρv) t discretization type element discretization ( ρv) ρv ( ) t oundary terms Ω Ω ( m
Treatment of Boundary Conditions Advanced CFD 03 Momentum BCs ( ρv) ( ρvv) = τ p B t semi-discretized form ( ρv) ( ρv) t discretization type element discretization ( ρv) ρv ( ) t oundary terms Ω Ω ( m
Main source: "Discrete-time systems and computer control" by Α. ΣΚΟΔΡΑΣ ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΔΙΑΛΕΞΗ 4 ΔΙΑΦΑΝΕΙΑ 1
 Main source: "Discrete-time systems and computer control" by Α. ΣΚΟΔΡΑΣ ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΔΙΑΛΕΞΗ 4 ΔΙΑΦΑΝΕΙΑ 1 A Brief History of Sampling Research 1915 - Edmund Taylor Whittaker (1873-1956) devised a
Main source: "Discrete-time systems and computer control" by Α. ΣΚΟΔΡΑΣ ΨΗΦΙΑΚΟΣ ΕΛΕΓΧΟΣ ΔΙΑΛΕΞΗ 4 ΔΙΑΦΑΝΕΙΑ 1 A Brief History of Sampling Research 1915 - Edmund Taylor Whittaker (1873-1956) devised a
Problem Set 9 Solutions. θ + 1. θ 2 + cotθ ( ) sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.
 sinθ e iφ is an eigenfunction of the ˆ L 2 operator. / θ 2. φ 2. sin 2 θ φ 2. ( ) = e iφ. = e iφ cosθ.") Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
Chemistry 362 Dr Jean M Standard Problem Set 9 Solutions The ˆ L 2 operator is defined as Verify that the angular wavefunction Y θ,φ) Also verify that the eigenvalue is given by 2! 2 & L ˆ 2! 2 2 θ 2 +
CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS
 CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS EXERCISE 01 Page 545 1. Use matrices to solve: 3x + 4y x + 5y + 7 3x + 4y x + 5y 7 Hence, 3 4 x 0 5 y 7 The inverse of 3 4 5 is: 1 5 4 1 5 4 15 8 3
CHAPTER 48 APPLICATIONS OF MATRICES AND DETERMINANTS EXERCISE 01 Page 545 1. Use matrices to solve: 3x + 4y x + 5y + 7 3x + 4y x + 5y 7 Hence, 3 4 x 0 5 y 7 The inverse of 3 4 5 is: 1 5 4 1 5 4 15 8 3
Π Ο Λ Ι Τ Ι Κ Α Κ Α Ι Σ Τ Ρ Α Τ Ι Ω Τ Ι Κ Α Γ Ε Γ Ο Ν Ο Τ Α
 Α Ρ Χ Α Ι Α Ι Σ Τ Ο Ρ Ι Α Π Ο Λ Ι Τ Ι Κ Α Κ Α Ι Σ Τ Ρ Α Τ Ι Ω Τ Ι Κ Α Γ Ε Γ Ο Ν Ο Τ Α Σ η µ ε ί ω σ η : σ υ ν ά δ ε λ φ ο ι, ν α µ ο υ σ υ γ χ ω ρ ή σ ε τ ε τ ο γ ρ ή γ ο ρ ο κ α ι α τ η µ έ λ η τ ο ύ
Α Ρ Χ Α Ι Α Ι Σ Τ Ο Ρ Ι Α Π Ο Λ Ι Τ Ι Κ Α Κ Α Ι Σ Τ Ρ Α Τ Ι Ω Τ Ι Κ Α Γ Ε Γ Ο Ν Ο Τ Α Σ η µ ε ί ω σ η : σ υ ν ά δ ε λ φ ο ι, ν α µ ο υ σ υ γ χ ω ρ ή σ ε τ ε τ ο γ ρ ή γ ο ρ ο κ α ι α τ η µ έ λ η τ ο ύ
Chapter 6: Systems of Linear Differential. be continuous functions on the interval
 Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
Chapter 6: Systems of Linear Differential Equations Let a (t), a 2 (t),..., a nn (t), b (t), b 2 (t),..., b n (t) be continuous functions on the interval I. The system of n first-order differential equations
6.4 Superposition of Linear Plane Progressive Waves
 .0 - Marine Hydrodynamics, Spring 005 Lecture.0 - Marine Hydrodynamics Lecture 6.4 Superposition of Linear Plane Progressive Waves. Oblique Plane Waves z v k k k z v k = ( k, k z ) θ (Looking up the y-ais
.0 - Marine Hydrodynamics, Spring 005 Lecture.0 - Marine Hydrodynamics Lecture 6.4 Superposition of Linear Plane Progressive Waves. Oblique Plane Waves z v k k k z v k = ( k, k z ) θ (Looking up the y-ais
Matrices and Determinants
 Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
Matrices and Determinants SUBJECTIVE PROBLEMS: Q 1. For what value of k do the following system of equations possess a non-trivial (i.e., not all zero) solution over the set of rationals Q? x + ky + 3z
ST5224: Advanced Statistical Theory II
 ST5224: Advanced Statistical Theory II 2014/2015: Semester II Tutorial 7 1. Let X be a sample from a population P and consider testing hypotheses H 0 : P = P 0 versus H 1 : P = P 1, where P j is a known
ST5224: Advanced Statistical Theory II 2014/2015: Semester II Tutorial 7 1. Let X be a sample from a population P and consider testing hypotheses H 0 : P = P 0 versus H 1 : P = P 1, where P j is a known
Fractional Colorings and Zykov Products of graphs
 Fractional Colorings and Zykov Products of graphs Who? Nichole Schimanski When? July 27, 2011 Graphs A graph, G, consists of a vertex set, V (G), and an edge set, E(G). V (G) is any finite set E(G) is
Fractional Colorings and Zykov Products of graphs Who? Nichole Schimanski When? July 27, 2011 Graphs A graph, G, consists of a vertex set, V (G), and an edge set, E(G). V (G) is any finite set E(G) is
1 String with massive end-points
 1 String with massive end-points Πρόβλημα 5.11:Θεωρείστε μια χορδή μήκους, τάσης T, με δύο σημειακά σωματίδια στα άκρα της, το ένα μάζας m, και το άλλο μάζας m. α) Μελετώντας την κίνηση των άκρων βρείτε
1 String with massive end-points Πρόβλημα 5.11:Θεωρείστε μια χορδή μήκους, τάσης T, με δύο σημειακά σωματίδια στα άκρα της, το ένα μάζας m, και το άλλο μάζας m. α) Μελετώντας την κίνηση των άκρων βρείτε
On the Galois Group of Linear Difference-Differential Equations
 On the Galois Group of Linear Difference-Differential Equations Ruyong Feng KLMM, Chinese Academy of Sciences, China Ruyong Feng (KLMM, CAS) Galois Group 1 / 19 Contents 1 Basic Notations and Concepts
On the Galois Group of Linear Difference-Differential Equations Ruyong Feng KLMM, Chinese Academy of Sciences, China Ruyong Feng (KLMM, CAS) Galois Group 1 / 19 Contents 1 Basic Notations and Concepts
Approximation of distance between locations on earth given by latitude and longitude
 Approximation of distance between locations on earth given by latitude and longitude Jan Behrens 2012-12-31 In this paper we shall provide a method to approximate distances between two points on earth
Approximation of distance between locations on earth given by latitude and longitude Jan Behrens 2012-12-31 In this paper we shall provide a method to approximate distances between two points on earth
6.3 Forecasting ARMA processes
 122 CHAPTER 6. ARMA MODELS 6.3 Forecasting ARMA processes The purpose of forecasting is to predict future values of a TS based on the data collected to the present. In this section we will discuss a linear
122 CHAPTER 6. ARMA MODELS 6.3 Forecasting ARMA processes The purpose of forecasting is to predict future values of a TS based on the data collected to the present. In this section we will discuss a linear
The wave equation in elastodynamic
 The wave equation in elastodynamic Wave propagation in a non-homogeneous anisotropic elastic medium occupying a bounded domain R d, d = 2, 3, with boundary Γ, is described by the linear wave equation:
The wave equation in elastodynamic Wave propagation in a non-homogeneous anisotropic elastic medium occupying a bounded domain R d, d = 2, 3, with boundary Γ, is described by the linear wave equation:
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Areas and Lengths in Polar Coordinates
 Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Kiryl Tsishchanka Areas and Lengths in Polar Coordinates In this section we develop the formula for the area of a region whose boundary is given by a polar equation. We need to use the formula for the
Numerical Analysis FMN011
 Numerical Analysis FMN011 Carmen Arévalo Lund University carmen@maths.lth.se Lecture 12 Periodic data A function g has period P if g(x + P ) = g(x) Model: Trigonometric polynomial of order M T M (x) =
Numerical Analysis FMN011 Carmen Arévalo Lund University carmen@maths.lth.se Lecture 12 Periodic data A function g has period P if g(x + P ) = g(x) Model: Trigonometric polynomial of order M T M (x) =
Potential Dividers. 46 minutes. 46 marks. Page 1 of 11
 Potential Dividers 46 minutes 46 marks Page 1 of 11 Q1. In the circuit shown in the figure below, the battery, of negligible internal resistance, has an emf of 30 V. The pd across the lamp is 6.0 V and
Potential Dividers 46 minutes 46 marks Page 1 of 11 Q1. In the circuit shown in the figure below, the battery, of negligible internal resistance, has an emf of 30 V. The pd across the lamp is 6.0 V and
Homework 8 Model Solution Section
 MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
MATH 004 Homework Solution Homework 8 Model Solution Section 14.5 14.6. 14.5. Use the Chain Rule to find dz where z cosx + 4y), x 5t 4, y 1 t. dz dx + dy y sinx + 4y)0t + 4) sinx + 4y) 1t ) 0t + 4t ) sinx
[1] P Q. Fig. 3.1
![[1] P Q. Fig. 3.1](/thumbs/79/80362156.jpg "[1] P Q. Fig. 3.1") 1 (a) Define resistance....... [1] (b) The smallest conductor within a computer processing chip can be represented as a rectangular block that is one atom high, four atoms wide and twenty atoms long. One
1 (a) Define resistance....... [1] (b) The smallest conductor within a computer processing chip can be represented as a rectangular block that is one atom high, four atoms wide and twenty atoms long. One
Overview. Transition Semantics. Configurations and the transition relation. Executions and computation
 Overview Transition Semantics Configurations and the transition relation Executions and computation Inference rules for small-step structural operational semantics for the simple imperative language Transition
Overview Transition Semantics Configurations and the transition relation Executions and computation Inference rules for small-step structural operational semantics for the simple imperative language Transition
The ε-pseudospectrum of a Matrix
 The ε-pseudospectrum of a Matrix Feb 16, 2015 () The ε-pseudospectrum of a Matrix Feb 16, 2015 1 / 18 1 Preliminaries 2 Definitions 3 Basic Properties 4 Computation of Pseudospectrum of 2 2 5 Problems
The ε-pseudospectrum of a Matrix Feb 16, 2015 () The ε-pseudospectrum of a Matrix Feb 16, 2015 1 / 18 1 Preliminaries 2 Definitions 3 Basic Properties 4 Computation of Pseudospectrum of 2 2 5 Problems
Parametrized Surfaces
 Parametrized Surfaces Recall from our unit on vector-valued functions at the beginning of the semester that an R 3 -valued function c(t) in one parameter is a mapping of the form c : I R 3 where I is some
Parametrized Surfaces Recall from our unit on vector-valued functions at the beginning of the semester that an R 3 -valued function c(t) in one parameter is a mapping of the form c : I R 3 where I is some
Solutions to Exercise Sheet 5
 Solutions to Eercise Sheet 5 jacques@ucsd.edu. Let X and Y be random variables with joint pdf f(, y) = 3y( + y) where and y. Determine each of the following probabilities. Solutions. a. P (X ). b. P (X
Solutions to Eercise Sheet 5 jacques@ucsd.edu. Let X and Y be random variables with joint pdf f(, y) = 3y( + y) where and y. Determine each of the following probabilities. Solutions. a. P (X ). b. P (X
b. Use the parametrization from (a) to compute the area of S a as S a ds. Be sure to substitute for ds!
 to compute the area of S a as S a ds. Be sure to substitute for ds!") MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
MTH U341 urface Integrals, tokes theorem, the divergence theorem To be turned in Wed., Dec. 1. 1. Let be the sphere of radius a, x 2 + y 2 + z 2 a 2. a. Use spherical coordinates (with ρ a) to parametrize.
Bayesian statistics. DS GA 1002 Probability and Statistics for Data Science.
 Bayesian statistics DS GA 1002 Probability and Statistics for Data Science http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall17 Carlos Fernandez-Granda Frequentist vs Bayesian statistics In frequentist
Bayesian statistics DS GA 1002 Probability and Statistics for Data Science http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall17 Carlos Fernandez-Granda Frequentist vs Bayesian statistics In frequentist
Geodesic Equations for the Wormhole Metric
 Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes
Geodesic Equations for the Wormhole Metric Dr R Herman Physics & Physical Oceanography, UNCW February 14, 2018 The Wormhole Metric Morris and Thorne wormhole metric: [M S Morris, K S Thorne, Wormholes
Mock Exam 7. 1 Hong Kong Educational Publishing Company. Section A 1. Reference: HKDSE Math M Q2 (a) (1 + kx) n 1M + 1A = (1) =
 (1 + kx) n 1M + 1A = (1) =") Mock Eam 7 Mock Eam 7 Section A. Reference: HKDSE Math M 0 Q (a) ( + k) n nn ( )( k) + nk ( ) + + nn ( ) k + nk + + + A nk... () nn ( ) k... () From (), k...() n Substituting () into (), nn ( ) n 76n 76n
Mock Eam 7 Mock Eam 7 Section A. Reference: HKDSE Math M 0 Q (a) ( + k) n nn ( )( k) + nk ( ) + + nn ( ) k + nk + + + A nk... () nn ( ) k... () From (), k...() n Substituting () into (), nn ( ) n 76n 76n
derivation of the Laplacian from rectangular to spherical coordinates
 derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
derivation of the Laplacian from rectangular to spherical coordinates swapnizzle 03-03- :5:43 We begin by recognizing the familiar conversion from rectangular to spherical coordinates (note that φ is used
Capacitors - Capacitance, Charge and Potential Difference
 Capacitors - Capacitance, Charge and Potential Difference Capacitors store electric charge. This ability to store electric charge is known as capacitance. A simple capacitor consists of 2 parallel metal
Capacitors - Capacitance, Charge and Potential Difference Capacitors store electric charge. This ability to store electric charge is known as capacitance. A simple capacitor consists of 2 parallel metal
Depth versus Rigidity in the Design of International Trade Agreements. Leslie Johns
 Depth versus Rigidity in the Design of International Trade Agreements Leslie Johns Supplemental Appendix September 3, 202 Alternative Punishment Mechanisms The one-period utility functions of the home
Depth versus Rigidity in the Design of International Trade Agreements Leslie Johns Supplemental Appendix September 3, 202 Alternative Punishment Mechanisms The one-period utility functions of the home
Exercises 10. Find a fundamental matrix of the given system of equations. Also find the fundamental matrix Φ(t) satisfying Φ(0) = I. 1.
 satisfying Φ(0) = I. 1.") Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
Exercises 0 More exercises are available in Elementary Differential Equations. If you have a problem to solve any of them, feel free to come to office hour. Problem Find a fundamental matrix of the given
ω ω ω ω ω ω+2 ω ω+2 + ω ω ω ω+2 + ω ω+1 ω ω+2 2 ω ω ω ω ω ω ω ω+1 ω ω2 ω ω2 + ω ω ω2 + ω ω ω ω2 + ω ω+1 ω ω2 + ω ω+1 + ω ω ω ω2 + ω
 0 1 2 3 4 5 6 ω ω + 1 ω + 2 ω + 3 ω + 4 ω2 ω2 + 1 ω2 + 2 ω2 + 3 ω3 ω3 + 1 ω3 + 2 ω4 ω4 + 1 ω5 ω 2 ω 2 + 1 ω 2 + 2 ω 2 + ω ω 2 + ω + 1 ω 2 + ω2 ω 2 2 ω 2 2 + 1 ω 2 2 + ω ω 2 3 ω 3 ω 3 + 1 ω 3 + ω ω 3 +
0 1 2 3 4 5 6 ω ω + 1 ω + 2 ω + 3 ω + 4 ω2 ω2 + 1 ω2 + 2 ω2 + 3 ω3 ω3 + 1 ω3 + 2 ω4 ω4 + 1 ω5 ω 2 ω 2 + 1 ω 2 + 2 ω 2 + ω ω 2 + ω + 1 ω 2 + ω2 ω 2 2 ω 2 2 + 1 ω 2 2 + ω ω 2 3 ω 3 ω 3 + 1 ω 3 + ω ω 3 +
FEM Method 2/5/13. FEM Method. We will explore: 1 D linear & higher order elements 2 D triangular & rectangular elements
 /5/ FEM Method We will explore: D linear & higher order elements D triangular & rectangular elements Powerful method developed originally to solve structural mechanics problems (e.g. bridges, buildings,
/5/ FEM Method We will explore: D linear & higher order elements D triangular & rectangular elements Powerful method developed originally to solve structural mechanics problems (e.g. bridges, buildings,
HIS series. Signal Inductor Multilayer Ceramic Type FEATURE PART NUMBERING SYSTEM DIMENSIONS HIS R12 (1) (2) (3) (4)
 (2) (3) (4)") FEATURE High Self Resonant Frequency Superior temperature stability Monolithic structure for high reliability Applications: RF circuit in telecommunication PART NUMBERING SYSTEM HIS 160808 - R12 (1) (2)
FEATURE High Self Resonant Frequency Superior temperature stability Monolithic structure for high reliability Applications: RF circuit in telecommunication PART NUMBERING SYSTEM HIS 160808 - R12 (1) (2)
Statistical Inference I Locally most powerful tests
 Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Statistical Inference I Locally most powerful tests Shirsendu Mukherjee Department of Statistics, Asutosh College, Kolkata, India. shirsendu st@yahoo.co.in So far we have treated the testing of one-sided
Solutions to the Schrodinger equation atomic orbitals. Ψ 1 s Ψ 2 s Ψ 2 px Ψ 2 py Ψ 2 pz
 Solutions to the Schrodinger equation atomic orbitals Ψ 1 s Ψ 2 s Ψ 2 px Ψ 2 py Ψ 2 pz ybridization Valence Bond Approach to bonding sp 3 (Ψ 2 s + Ψ 2 px + Ψ 2 py + Ψ 2 pz) sp 2 (Ψ 2 s + Ψ 2 px + Ψ 2 py)
Solutions to the Schrodinger equation atomic orbitals Ψ 1 s Ψ 2 s Ψ 2 px Ψ 2 py Ψ 2 pz ybridization Valence Bond Approach to bonding sp 3 (Ψ 2 s + Ψ 2 px + Ψ 2 py + Ψ 2 pz) sp 2 (Ψ 2 s + Ψ 2 px + Ψ 2 py)
3+1 Splitting of the Generalized Harmonic Equations
 3+1 Splitting of the Generalized Harmonic Equations David Brown North Carolina State University EGM June 2011 Numerical Relativity Interpret general relativity as an initial value problem: Split spacetime
3+1 Splitting of the Generalized Harmonic Equations David Brown North Carolina State University EGM June 2011 Numerical Relativity Interpret general relativity as an initial value problem: Split spacetime
Ηλεκτρονικοί Υπολογιστές IV
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ηλεκτρονικοί Υπολογιστές IV Δυναμική του χρέους και του ελλείμματος Διδάσκων: Επίκουρος Καθηγητής Αθανάσιος Σταυρακούδης Άδειες Χρήσης Το παρόν εκπαιδευτικό
ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ηλεκτρονικοί Υπολογιστές IV Δυναμική του χρέους και του ελλείμματος Διδάσκων: Επίκουρος Καθηγητής Αθανάσιος Σταυρακούδης Άδειες Χρήσης Το παρόν εκπαιδευτικό
Local Approximation with Kernels
 Local Approximation with Kernels Thomas Hangelbroek University of Hawaii at Manoa 5th International Conference Approximation Theory, 26 work supported by: NSF DMS-43726 A cubic spline example Consider
Local Approximation with Kernels Thomas Hangelbroek University of Hawaii at Manoa 5th International Conference Approximation Theory, 26 work supported by: NSF DMS-43726 A cubic spline example Consider
EE101: Resonance in RLC circuits
 EE11: Resonance in RLC circuits M. B. Patil mbatil@ee.iitb.ac.in www.ee.iitb.ac.in/~sequel Deartment of Electrical Engineering Indian Institute of Technology Bombay I V R V L V C I = I m = R + jωl + 1/jωC
EE11: Resonance in RLC circuits M. B. Patil mbatil@ee.iitb.ac.in www.ee.iitb.ac.in/~sequel Deartment of Electrical Engineering Indian Institute of Technology Bombay I V R V L V C I = I m = R + jωl + 1/jωC
Risk! " #$%&'() *!'+,'''## -. / # $
 *!'+,'''## -. / # $") Risk! " #$%&'(!'+,'''## -. / 0! " # $ +/ #%&''&(+(( &'',$ #-&''&$ #(./0&'',$( ( (! #( &''/$ #$ 3 #4&'',$ #- &'',$ #5&''6(&''&7&'',$ / ( /8 9 :&' " 4; < # $ 3 " ( #$ = = #$ #$ ( 3 - > # $ 3 = = " 3 3, 6?3
Risk! " #$%&'(!'+,'''## -. / 0! " # $ +/ #%&''&(+(( &'',$ #-&''&$ #(./0&'',$( ( (! #( &''/$ #$ 3 #4&'',$ #- &'',$ #5&''6(&''&7&'',$ / ( /8 9 :&' " 4; < # $ 3 " ( #$ = = #$ #$ ( 3 - > # $ 3 = = " 3 3, 6?3
Calculating the propagation delay of coaxial cable
 Your source for quality GNSS Networking Solutions and Design Services! Page 1 of 5 Calculating the propagation delay of coaxial cable The delay of a cable or velocity factor is determined by the dielectric
Your source for quality GNSS Networking Solutions and Design Services! Page 1 of 5 Calculating the propagation delay of coaxial cable The delay of a cable or velocity factor is determined by the dielectric
Lifting Entry 2. Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion MARYLAND U N I V E R S I T Y O F
 ifting Entry Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion MARYAN 1 010 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu ifting Atmospheric
ifting Entry Basic planar dynamics of motion, again Yet another equilibrium glide Hypersonic phugoid motion MARYAN 1 010 avid. Akin - All rights reserved http://spacecraft.ssl.umd.edu ifting Atmospheric
Pg The perimeter is P = 3x The area of a triangle is. where b is the base, h is the height. In our case b = x, then the area is
 Pg. 9. The perimeter is P = The area of a triangle is A = bh where b is the base, h is the height 0 h= btan 60 = b = b In our case b =, then the area is A = = 0. By Pythagorean theorem a + a = d a a =
Pg. 9. The perimeter is P = The area of a triangle is A = bh where b is the base, h is the height 0 h= btan 60 = b = b In our case b =, then the area is A = = 0. By Pythagorean theorem a + a = d a a =