Smith i diagramm. Peegeldustegur
|
|
|
- Κλεοπάτρα Μαργαρίτες Γλυκύς
- 7 χρόνια πριν
- Προβολές:
Transcript
1 Smith i diagramm Smith i diagrammiks nimetatakse graafilist abivahendit/meetodit põhiliselt sobitusküsimuste lahendamiseks. Selle võttis aastal kasutusele Philip H. Smith, kes töötas tol ajal ettevõttes Bell Laboratories, kuid oma lihtsuse ja arusaadavuse tõttu on Smithi diagramm tänini kasutusel kogu sidevaldkonnas. Kaasaegsetes network analyzer ites on alati võimalik esitada mõõtetulemusi ka Smithi diagrammil. P. H. Smith lõi diagrammi algselt peegeldus- ja seisulaineteguri leidmiseks, seepärast vaatleme pisut lähemalt, mida peegeldustegur ja seisulainetegur endast kujutavad. See aitab paremini mõista ka diagrammi sisu. Peegeldustegur Signaali levimisel transmissiooniahela lülides võib erinevate lülide ühenduskohas tekkida signaali peegeldumine. Seetõttu osa signaali võimsusest ei liigu enam kasulikus suunas, vaid peegeldub tagasi. Peegeldunud signaali võimsuse P peegeldunud saab leida valemiga: P peegeldunud = Γ 2 P sis kus P sis on sisendvõimsus on Γ on peegeldustegur. Peegeldustegur Γ on kompleksne suurus (tal on nii amplituud kui ka faas) ja see näitab, milline on peegeldunud signaali amplituud ja faas võrreldes algse signaaliga. Seejuures on teada, et peegeldustegur sõltub omavahel ühendatud kahe lüli nimetame neid liiniks ja koormuseks komplekstakistustest Z liin ja Z koormus : Z Z koormus liin Γ =. Z koormus + Z liin Universaalsuse mõttes läheme üle normeeritud takistusele avaldub: Z = Z koormus Z liin, seega peegeldustegur Γ = Z 1. Z + 1 Märkus: Z on komplekstakistus, mis koosneb nii aktiivtakistusest R kui ka reaktiivtakistusest jx (Z = R + jx). Näide. Kui Z = 0,5 + j2, siis 0,5 + j2 1 0,5 + j2 Γ = = = 0,5 + j ,5 + j2 ( 0,5 + j2)( 1,5 j2) ( 1,5 + j2)( 1,5 j2) 0,75 + j + 3 j 4 j = 2 2,25 4 j 2 3, j = = 0,52 + 0,64 j 6,25. Järelikult transmissiooniliini kaudu edastatav võimsus on 1
2 P ülekantud = P sis P peegeldunud = P sis Γ 2 P sis = 2 ( Γ ) Psis 1. Valemist on hästi näha, et kui peegeldustegur Γ = 0, siis peegeldusi ei esine ja kogu sisendisse antud võimsus kandub liinis edasi (liin on koormusega sobitatud). Juhul kui peegeldustegur Γ = 1, toimub signaali täielik peegeldumine ning kogu sisendisse antud võimsus peegeldub allika poole tagasi (ülekannet ei toimu). Järelikult iseloomustab peegeldustegur otseselt liini transmissioonikadusid! Saab näidata, et liin ja koormus on ideaalselt sobitatud ainult siis, kui mõlema takistuste aktiivosad on võrdsed ja reaktiivosad on vastasmärgiga. Sel juhul Γ = Z Z koormus koormus Z + Z liin liin = ( R + jx ) ( R jx ) ( R + jx ) + ( R jx ) = 0. Seisulainetegur (SWR ehk VSWR) Vaatleme, kuidas mõjutab peegeldumine signaali mähisjoont. Joonisel 1 on kujutatud olukorda, kus liin on koormusega sobitatud ehk Γ = 0. Sellisel juhul liinis peegeldusi ei toimu ning signaali mähisjooneks on sirge. Joonis 1 Signaali mähisjoon, kui liin on koormusega sobitatud (Γ = 0) Juhul, kui peegeldustegur on suurem, peegeldub koormuselt osa signaali tagasi ning koormusele jõuab signaal, mis on algsest signaalist väiksema amplituudiga, kuid koormusel oleva signaali mähisjoon on siiski sirge. Tagasipeegeldunud signaal aga kombineerub algse signaaliga ning selle tõttu liinis oleva signaali mähisjoone kuju muutub (vt joonis 2). 2
3 Joonis 2 Mähisjoon liinis, kui Γ = 0,5 Tekib perioodilise struktuuriga mähisjoone kõver, mis kordub iga poollaine järel (vt joonis 3). See mähisjoone kõver ei liigu ja seepärast nimetatakse tekkinud mähisjoont ka seisvaks laineks. Joonis 3 Mähisjoon liinis sobitamata koormuse korral Mähisjoone maksimaal- ja minimaalväärtuste U max ja U min suhet nimetatakse seisulaineteguriks, mida tähistatakse ingliskeelse lühendiga SWR (standing wave ratio), vahel ka VSWR (voltage standing wave ratio): SWR VSWR = U max =. U min Selgub, et SWR on otseses sõltuvuses peegeldustegurist: 3
4 1+ Γ SWR =. 1 Γ Nendest kahest valemist on näha, et kui liin on koormusega sobitatud (Γ = 0), siis SWR = 1 ja U max = U min ehk signaali mähisjoon liinis on sirge. Kui liin on koormusega täiesti sobitamata (Γ = 1), siis SWR = ja signaali mähisjoon kõigub liinis tugevasti. Järelikult mida suurem on SWR, seda halvemini on liin koormusega sobitud ehk tugevam on signaali mähisjoone kõikumine liinis. Koormus liini lõpus Kuigi eespool oli juttu seisva laine kui pinge mähisjoone perioodilisest muutumisest, siis täpselt samamoodi muutub liinis ka voolutugevus (vt joonis 4). Voolutugevuse maksimumid on seal, kus asuvad pinge miinimumid ja vastupidi. Joonis 4 Pinge ja voolu mähisjooned liinis Nii pinge kui voolutugevuse miinimumide ja maksimumide asukoht on otseselt määratud liini lõppu lülitatud koormusega Z koormus (= Z liini_lõpp ), kuna see määrab ära, milline peab olema liini lõpus pinge ja voolutugevuse vahekord. Kuna aga mõlemad mähisjooned muutuvad liinis perioodiliselt, siis on sama pinge ja voolutugevuse vahekord liinis ka perioodiliselt korduv. Ehk teisisõnu liini lõppu lülitatud takistust on võimalik mõõta ka liini mistahes punktis, mis on liini lõpust täpselt poollaine arv kordsel kaugusel (vt joonis 5). 4
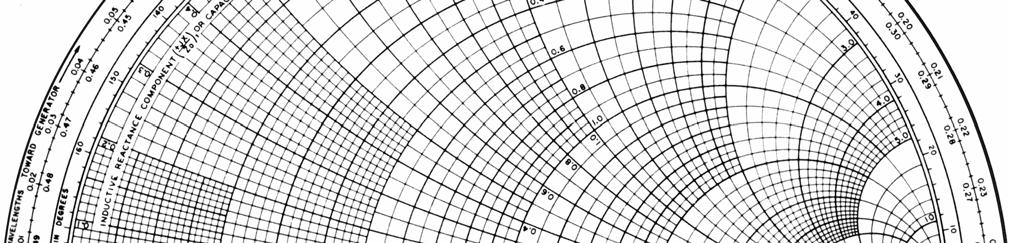
5 Joonis 5 Ekvivalentsete takistuste kujunemine Kui lülitada liini lõppu lühis (Z liini_lõpp = 0), tekivad liinis pinge miinimumid täpselt poollaine arv kordsele kaugusele liini lõpust. Smithi diagrammi kasutamine Tuginedes eelnevale, on nüüd kergem mõista Smithi diagrammil kujutatut. Nagu juba teada, loodi Smithi diagramm seisulaineteguri arvutamiseks. Kuna seisulainetegur on leitav signaali mähisjoone järgi, mis on perioodilise struktuuriga, kordudes iga poole lainepikkuse tagant, siis selleks, et määrata vaatepunkti asukohta liinis, piisab poole laine pikkusest skaalast. Seepärast kirjeldab ka Smithi diagramm endast liinilõiku, mille pikkus on pool lainepikkust. Asukoha skaala on keeratud ringiks, milles pool lainepikkust on sama, mis null lainepikkust (vt joonis 6). Joonis 6 Asukoha skaala Smithi diagrammil 5
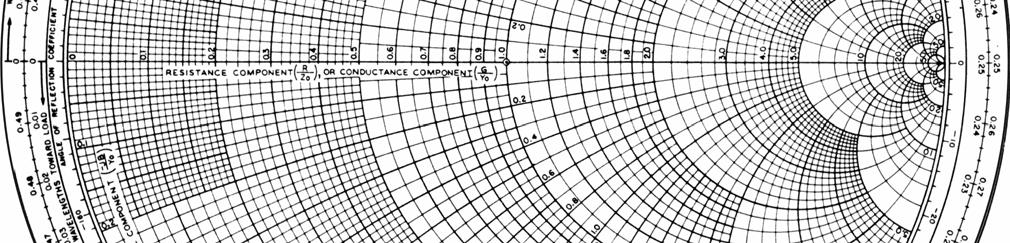
6 Kui on tarvidus liinil vaatepunkti nihutada, tuleb jälgida liikumise suunda kas liigutakse koormuse või generaatori poole (koormusest eemale). Smithi diagrammil tähendab see liikumist vastavalt kas vastupäeva või päripäeva. Nagu oli eelpool juttu, on transmissiooniahela takistus Z üldjuhul kompleksne suurus see koosneb aktiivosast R ja reaktiivosast jx ning kogutakistus on nende summa: [ Ω] Z = R + jx. Smithi diagrammilt saab kergesti lugeda nii aktiiv- kui ka reaktiivtakistuse väärtuse. Aktiivtakistus on kujutatud diagrammil konstantse väärtusega ringidel aktiivtakistuse samajoontel, mis koonduvad diagrammi paremas servas (vt joonis 7). Iga ringi ulatuses on aktiivtakistuse väärtus konstantne. Suurim ring omab väärtust R = 0 ning see on ühtlasi diagrammi välisring. Väikseim ring asub diagrammi paremas servas, see on lõpmata väike ning takistuse väärtus on siin lõpmata suur (R = ). Joonis 7 Aktiivtakistuse samajooned Smithi diagrammil Reaktiivtakistuse X väärtused saab lugeda joontelt, mis algavad diagrammi paremast servast ja on risti aktiivtakistuse samajoontega (vt joonis 8). 6
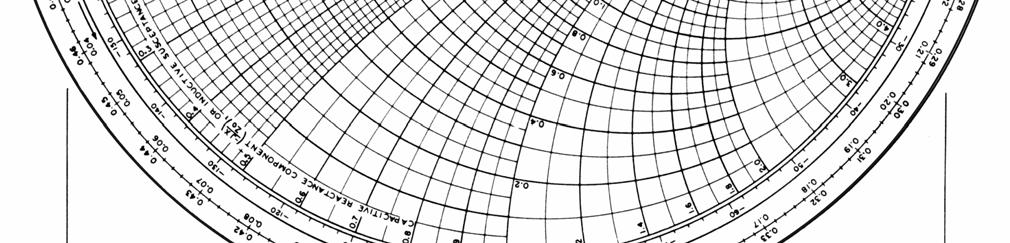
7 Joonis 8 Reaktiivtakistuse samajooned Smithi diagrammil Jooniselt on näha, et diagrammi x-teljel X = 0 ja järelikult punktidel, mis asuvad sellel joonel, takistusel reaktiivosa puudub. Seega kui me asume diagrammil x-telje peal, siis on takistus puht aktiivne. Ühendades omavahel teadmised aktiiv- ja reaktiivtakistuse leidmisest, saame Smithi diagrammilt välja lugeda mistahes kompleksse takistuse. Selleks tuleb meil lugeda aktiiv- ja reaktiivtakistuse väärtused diagrammilt eraldi aktiivtakistuse saamiseks pikendada samajooni kuni x-teljeni ning reaktiivtakistuse saamiseks pikendada samajooni kuni diagrammi servani. Saades eraldi kätte arvulised R ja X väärtused, avaldub summaarne takistus nende Z = R + jx Ω. summana: [ ] Näiteks järgmisel joonisel (joonis 9) on punktis A aktiivtakistus R = 1 ja reaktiivtakistus X = 1. Järelikult summaarne takistus on Z = R + jx = 1 + j. Punktis B on R = 0,5 ja X = -1,5, seega summaarne takistus Z = 0,5 j1,5. Punktis C on takistus Z = 0,2 + j0 = 0,2. 7
8 Joonis 9 Komplekstakistuse lugemine Smithi diagrammilt Universaalsuse mõttes on Smithi diagrammil takistus antud normeeritud kujul. Selleks, et leida takistust oomides, tuleb diagrammilt loetud väärtus korrutada läbi normeerimistakistusega Z 0, milleks võetakse üldjuhul liini takistus (tavaliselt 50 Ω või 75 Ω). Kui Z 0 = 50 Ω, siis eelmise joonise järgi on punktis B takistus Z Ω = 50 Ω (0,5 j1,5) = 25 j75 Ω. Nagu oli eespool juttu, näitab peegeldustegur Γ, milline on tagasipeegeldunud signaali amplituud ja faas võrreldes algse signaaliga. Samuti on juba teada, et peegeldustegur on seotud takistusega vastavalt valemile Γ = Z 1. Z + 1 Smithi diagrammilt saaksime R ja X väärtuste kaudu juba välja arvutada Z väärtuse ja selle kaudu omakorda peegeldusteguri Γ, kuid kuna nii Z kui ka Γ on komplekssed suurused, oleks selline meetod küllaltki tülikas. Arvutuste tegemiseks puudub ka vajadus, kuna selgub, et Smithi diagrammilt on peegeldusteguri väärtus otseselt välja loetav! Nimelt ilmneb, et kui tõmmata Smithi diagrammi keskpunktist vaadeldavasse punkti ühendav joon, siis selle joone suhteline pikkus (st pikkus jagatuna diagrammi raadiusega) võrdubki sellele punkti vastavale takistusele vastava peegeldusteguri mooduliga Γ! Veelgi enam selgub, et tõmmatud joone ja horisontaaltelje vahele jääv nurk γ võrdub peegeldusteguri faasiga (näitab, milline on peegeldunud signaali faas)! Järelikult võime tõmmatud joont vaadata kui peegeldusteguri graafilist esitust (joonis 10). 8
9 Joonis 10 Peegeldustegur Smithi diagrammil Näiteks joonisel asuva punkti B korral on peegeldusteguri mooduli pikkus (mõõdetuna diagrammilt) Γ = 0,75 ja nurk γ = 64º. Jooniselt on näha, mida ligemal on vaatluspunkt diagrammi keskpunktile, seda väiksem on peegeldustegur ehk seda paremini on koormus liiniga sobitatud. Koormus on liiniga täielikult sobitatud, kui vaadeldav punkt asub täpselt diagrammi keskel, sest sellisel juhul peegeldustegur (joone pikkus) võrdub nulliga. Vaatleme lõpetuseks, kuidas on Smithi diagrammil esitatud seisulainetegur SWR. Kuna SWR ja peegeldustegur Γ on omavahel seotud valemiga 1+ Γ SWR = ( 1 ) 1 Γ siis seisulainetegur ei sõltu peegeldusteguri faasist vaid ainult moodulist. Peegeldusteguri moodul aga iseloomustab Smithi diagrammi keskpunkti tõmmatud ringjoone raadiust. Järelikult igal punktil, mis asub diagrammi keskpunktist samal kaugusel, on samasugune seisulainetegur SWR. Nii joonistuvad välja seisulaineteguri samajooned (joonis 11). 9
10 Joonis 11 Seisulaineteguri (SWR) samajooned Smithi diagrammil Seisulaineteguri arvulise väärtuse saab lugeda diagrammilt otse aktiivtakistuse skaalalt vahemikust 1.. (vt joonis 11). Samuti võib selle välja arvutada vastavalt valemile (1). 1+ 0,75 Näiteks joonisel 12 punktile B vastav seisulainetegur on SWR = = ,75 Joonis 12 Seisulaineteguri arvutamise näide Tänapäeva raadiotehnikas on laialt levinud nn S-parameetrite kasutamine. Parameeter S 11 (nn return loss ) on otseselt seotud peegeldusteguriga: 10
11 S 11 = 20log Γ [db]. Kui liin on koormusega sobitatud (Γ = 0), siis S 11 = -. Kui liin on koormusega täiesti sobitamata (Γ = 1), siis S 11 = 0. Kuna alati 0 Γ 1, siis järelikult on S 11 alati mittepositiivne. Näiteks peegeldustegurile Γ = 0,75 vastav S 11 väärtus on: S = 20log 0,75 = 2, 5dB 11 Smithi diagrammi kasutamisest mõõteseadmetel Tavaliselt vaadeldakse seadmete tööd mitte ühel konkreetsel sagedusel, vaid teatud sagedusvahemikus. Erinevatele sagedustele vastab aga üldjuhul ka erinev liini või koormuse takistus ja seega on selle takistuse kujutise asukoht Smithi diagrammil erinev. Kui võtta vaatluse alla sagedusvahemik f 1 f 2, siis Smithi diagrammile saab kanda kõikide nendele sagedustele vastavate takistuste punktid, millest moodustub pidev joon. Iga joone punkt tähistab erinevale sagedusele vastavat takistust. Ühe suvalise seadme peegeldustegur on kantud joonisele 13. Sagedusele f 1 vastab takistus, mille juurde on märgitud f 1 ja sagedusele f 2 vastab takistus, mille juurde on märgitud f 2. Tumedal joonel liikudes saab leida kõikidele ülejäänud sagedustele vastavad takistused vahemikus f 1 f 2. Joonis 13 Sagedusvahemiku esitus Smithi diagrammil Diagrammilt on näha, et kõige halvemini on mõõdetav koormus või liin sobitatud sagedusel f 1, kuna selle punkti kaugus on diagrammi keskpunktist kõige suurem (järelikult ka peegeldustegur on kõige suurem). Kõige paremini on sobitustingimus täidetud sagedusel f A, kuna see punkt asub keskpunktile kõige lähemal (peegeldustegur on kõige väiksem). 11
12 Viiteid 1. Seisva laine kujunemise java applet: Smithi diagrammi applet:
13 13
ANTENNID JA RF ELEKTROONIKA
 TALLINNA TEHNIKAÜLIKOOL Mikrolainetehnika õppetool Laboratoorne töö aines ANTENNID JA RF ELEKTROONIKA Antenni sisendtakistuse määramine Tallinn 2005 1 Eesmärk Käesoleva laboratoorse töö eesmärgiks on tutvuda
TALLINNA TEHNIKAÜLIKOOL Mikrolainetehnika õppetool Laboratoorne töö aines ANTENNID JA RF ELEKTROONIKA Antenni sisendtakistuse määramine Tallinn 2005 1 Eesmärk Käesoleva laboratoorse töö eesmärgiks on tutvuda
MATEMAATIKA TÄIENDUSÕPE MÕISTED, VALEMID, NÄITED, ÜLESANDED LEA PALLAS VII OSA
 MATEMAATIKA TÄIENDUSÕPE MÕISTED, VALEMID, NÄITED, ÜLESANDED LEA PALLAS VII OSA SISUKORD 57 Joone uutuja Näited 8 58 Ülesanded uutuja võrrandi koostamisest 57 Joone uutuja Näited Funktsiooni tuletisel on
MATEMAATIKA TÄIENDUSÕPE MÕISTED, VALEMID, NÄITED, ÜLESANDED LEA PALLAS VII OSA SISUKORD 57 Joone uutuja Näited 8 58 Ülesanded uutuja võrrandi koostamisest 57 Joone uutuja Näited Funktsiooni tuletisel on
Planeedi Maa kaardistamine G O R. Planeedi Maa kõige lihtsamaks mudeliks on kera. Joon 1
 laneedi Maa kaadistamine laneedi Maa kõige lihtsamaks mudeliks on kea. G Joon 1 Maapinna kaadistamine põhineb kea ümbeingjoontel, millest pikimat nimetatakse suuingjooneks. Need suuingjooned, mis läbivad
laneedi Maa kaadistamine laneedi Maa kõige lihtsamaks mudeliks on kea. G Joon 1 Maapinna kaadistamine põhineb kea ümbeingjoontel, millest pikimat nimetatakse suuingjooneks. Need suuingjooned, mis läbivad
Ruumilise jõusüsteemi taandamine lihtsaimale kujule
 Kodutöö nr.1 uumilise jõusüsteemi taandamine lihtsaimale kujule Ülesanne Taandada antud jõusüsteem lihtsaimale kujule. isttahuka (joonis 1.) mõõdud ning jõudude moodulid ja suunad on antud tabelis 1. D
Kodutöö nr.1 uumilise jõusüsteemi taandamine lihtsaimale kujule Ülesanne Taandada antud jõusüsteem lihtsaimale kujule. isttahuka (joonis 1.) mõõdud ning jõudude moodulid ja suunad on antud tabelis 1. D
Kompleksarvu algebraline kuju
 Kompleksarvud p. 1/15 Kompleksarvud Kompleksarvu algebraline kuju Mati Väljas mati.valjas@ttu.ee Tallinna Tehnikaülikool Kompleksarvud p. 2/15 Hulk Hulk on kaasaegse matemaatika algmõiste, mida ei saa
Kompleksarvud p. 1/15 Kompleksarvud Kompleksarvu algebraline kuju Mati Väljas mati.valjas@ttu.ee Tallinna Tehnikaülikool Kompleksarvud p. 2/15 Hulk Hulk on kaasaegse matemaatika algmõiste, mida ei saa
Funktsiooni diferentsiaal
 Diferentsiaal Funktsiooni diferentsiaal Argumendi muut Δx ja sellele vastav funktsiooni y = f (x) muut kohal x Eeldusel, et f D(x), saame Δy = f (x + Δx) f (x). f (x) = ehk piisavalt väikese Δx korral
Diferentsiaal Funktsiooni diferentsiaal Argumendi muut Δx ja sellele vastav funktsiooni y = f (x) muut kohal x Eeldusel, et f D(x), saame Δy = f (x + Δx) f (x). f (x) = ehk piisavalt väikese Δx korral
Lokaalsed ekstreemumid
 Lokaalsed ekstreemumid Öeldakse, et funktsioonil f (x) on punktis x lokaalne maksimum, kui leidub selline positiivne arv δ, et 0 < Δx < δ Δy 0. Öeldakse, et funktsioonil f (x) on punktis x lokaalne miinimum,
Lokaalsed ekstreemumid Öeldakse, et funktsioonil f (x) on punktis x lokaalne maksimum, kui leidub selline positiivne arv δ, et 0 < Δx < δ Δy 0. Öeldakse, et funktsioonil f (x) on punktis x lokaalne miinimum,
Ehitusmehaanika harjutus
 Ehitusmehaanika harjutus Sõrestik 2. Mõjujooned /25 2 6 8 0 2 6 C 000 3 5 7 9 3 5 "" 00 x C 2 C 3 z Andres Lahe Mehaanikainstituut Tallinna Tehnikaülikool Tallinn 2007 See töö on litsentsi all Creative
Ehitusmehaanika harjutus Sõrestik 2. Mõjujooned /25 2 6 8 0 2 6 C 000 3 5 7 9 3 5 "" 00 x C 2 C 3 z Andres Lahe Mehaanikainstituut Tallinna Tehnikaülikool Tallinn 2007 See töö on litsentsi all Creative
Geomeetrilised vektorid
 Vektorid Geomeetrilised vektorid Skalaarideks nimetatakse suurusi, mida saab esitada ühe arvuga suuruse arvulise väärtusega. Skalaari iseloomuga suurusi nimetatakse skalaarseteks suurusteks. Skalaarse
Vektorid Geomeetrilised vektorid Skalaarideks nimetatakse suurusi, mida saab esitada ühe arvuga suuruse arvulise väärtusega. Skalaari iseloomuga suurusi nimetatakse skalaarseteks suurusteks. Skalaarse
HAPE-ALUS TASAKAAL. Teema nr 2
 PE-LUS TSL Teema nr Tugevad happed Tugevad happed on lahuses täielikult dissotiseerunud + sisaldus lahuses on võrdne happe analüütilise kontsentratsiooniga Nt NO Cl SO 4 (esimeses astmes) p a väärtused
PE-LUS TSL Teema nr Tugevad happed Tugevad happed on lahuses täielikult dissotiseerunud + sisaldus lahuses on võrdne happe analüütilise kontsentratsiooniga Nt NO Cl SO 4 (esimeses astmes) p a väärtused
2.2.1 Geomeetriline interpretatsioon
 2.2. MAATRIKSI P X OMADUSED 19 2.2.1 Geomeetriline interpretatsioon Maatriksi X (dimensioonidega n k) veergude poolt moodustatav vektorruum (inglise k. column space) C(X) on defineeritud järgmiselt: Defineerides
2.2. MAATRIKSI P X OMADUSED 19 2.2.1 Geomeetriline interpretatsioon Maatriksi X (dimensioonidega n k) veergude poolt moodustatav vektorruum (inglise k. column space) C(X) on defineeritud järgmiselt: Defineerides
9. AM ja FM detektorid
 1 9. AM ja FM detektorid IRO0070 Kõrgsageduslik signaalitöötlus Demodulaator Eraldab moduleeritud signaalist informatiivse osa. Konkreetne lahendus sõltub modulatsiooniviisist. Eristatakse Amplituuddetektoreid
1 9. AM ja FM detektorid IRO0070 Kõrgsageduslik signaalitöötlus Demodulaator Eraldab moduleeritud signaalist informatiivse osa. Konkreetne lahendus sõltub modulatsiooniviisist. Eristatakse Amplituuddetektoreid
Vektorid II. Analüütiline geomeetria 3D Modelleerimise ja visualiseerimise erialale
 Vektorid II Analüütiline geomeetria 3D Modelleerimise ja visualiseerimise erialale Vektorid Vektorid on arvude järjestatud hulgad (s.t. iga komponendi väärtus ja positsioon hulgas on tähenduslikud) Vektori
Vektorid II Analüütiline geomeetria 3D Modelleerimise ja visualiseerimise erialale Vektorid Vektorid on arvude järjestatud hulgad (s.t. iga komponendi väärtus ja positsioon hulgas on tähenduslikud) Vektori
Analüütilise geomeetria praktikum II. L. Tuulmets
 Analüütilise geomeetria praktikum II L. Tuulmets Tartu 1985 2 Peatükk 4 Sirge tasandil 1. Sirge tasandil Kui tasandil on antud afiinne reeper, siis iga sirge tasandil on selle reeperi suhtes määratud lineaarvõrrandiga
Analüütilise geomeetria praktikum II L. Tuulmets Tartu 1985 2 Peatükk 4 Sirge tasandil 1. Sirge tasandil Kui tasandil on antud afiinne reeper, siis iga sirge tasandil on selle reeperi suhtes määratud lineaarvõrrandiga
Matemaatiline analüüs I iseseisvad ülesanded
 Matemaatiline analüüs I iseseisvad ülesanded. Leidke funktsiooni y = log( ) + + 5 määramispiirkond.. Leidke funktsiooni y = + arcsin 5 määramispiirkond.. Leidke funktsiooni y = sin + 6 määramispiirkond.
Matemaatiline analüüs I iseseisvad ülesanded. Leidke funktsiooni y = log( ) + + 5 määramispiirkond.. Leidke funktsiooni y = + arcsin 5 määramispiirkond.. Leidke funktsiooni y = sin + 6 määramispiirkond.
20. SIRGE VÕRRANDID. Joonis 20.1
 κ ËÁÊ Â Ì Ë Æ Á 20. SIRGE VÕRRANDID Sirget me võime vaadelda kas tasandil E 2 või ruumis E 3. Sirget vaadelda sirgel E 1 ei oma mõtet, sest tegemist on ühe ja sama sirgega. Esialgu on meie käsitlus nii
κ ËÁÊ Â Ì Ë Æ Á 20. SIRGE VÕRRANDID Sirget me võime vaadelda kas tasandil E 2 või ruumis E 3. Sirget vaadelda sirgel E 1 ei oma mõtet, sest tegemist on ühe ja sama sirgega. Esialgu on meie käsitlus nii
MATEMAATIKA TÄIENDUSÕPE MÕISTED, VALEMID, NÄITED LEA PALLAS XII OSA
 MATEMAATIKA TÄIENDUSÕPE MÕISTED, VALEMID, NÄITED LEA PALLAS XII OSA SISUKORD 8 MÄÄRAMATA INTEGRAAL 56 8 Algfunktsioon ja määramata integraal 56 8 Integraalide tabel 57 8 Määramata integraali omadusi 58
MATEMAATIKA TÄIENDUSÕPE MÕISTED, VALEMID, NÄITED LEA PALLAS XII OSA SISUKORD 8 MÄÄRAMATA INTEGRAAL 56 8 Algfunktsioon ja määramata integraal 56 8 Integraalide tabel 57 8 Määramata integraali omadusi 58
28. Sirgvoolu, solenoidi ja toroidi magnetinduktsiooni arvutamine koguvooluseaduse abil.
 8. Sigvoolu, solenoidi j tooidi mgnetinduktsiooni vutmine koguvooluseduse il. See on vem vdtud, kuid mitte juhtme sees. Koguvooluseduse il on sed lihtne teh. Olgu lõpmt pikk juhe ingikujulise istlõikeg,
8. Sigvoolu, solenoidi j tooidi mgnetinduktsiooni vutmine koguvooluseduse il. See on vem vdtud, kuid mitte juhtme sees. Koguvooluseduse il on sed lihtne teh. Olgu lõpmt pikk juhe ingikujulise istlõikeg,
4.1 Funktsiooni lähendamine. Taylori polünoom.
 Peatükk 4 Tuletise rakendusi 4.1 Funktsiooni lähendamine. Talori polünoom. Mitmetes matemaatika rakendustes on vaja leida keerulistele funktsioonidele lihtsaid lähendeid. Enamasti konstrueeritakse taolised
Peatükk 4 Tuletise rakendusi 4.1 Funktsiooni lähendamine. Talori polünoom. Mitmetes matemaatika rakendustes on vaja leida keerulistele funktsioonidele lihtsaid lähendeid. Enamasti konstrueeritakse taolised
Sissejuhatus mehhatroonikasse MHK0120
 Sissejuhatus mehhatroonikasse MHK0120 2. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Loenguslaidid Materjalid D. Halliday,R. Resnick, J. Walker. Füüsika põhikursus : õpik kõrgkoolile I köide. Eesti
Sissejuhatus mehhatroonikasse MHK0120 2. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Loenguslaidid Materjalid D. Halliday,R. Resnick, J. Walker. Füüsika põhikursus : õpik kõrgkoolile I köide. Eesti
Funktsioonide õpetamisest põhikooli matemaatikakursuses
 Funktsioonide õpetamisest põhikooli matemaatikakursuses Allar Veelmaa, Loo Keskkool Funktsioon on üldtähenduses eesmärgipärane omadus, ülesanne, otstarve. Mõiste funktsioon ei ole kasutusel ainult matemaatikas,
Funktsioonide õpetamisest põhikooli matemaatikakursuses Allar Veelmaa, Loo Keskkool Funktsioon on üldtähenduses eesmärgipärane omadus, ülesanne, otstarve. Mõiste funktsioon ei ole kasutusel ainult matemaatikas,
KORDAMINE RIIGIEKSAMIKS VII teema Vektor. Joone võrrandid.
 KORDMINE RIIGIEKSMIKS VII teema Vektor Joone võrrandid Vektoriaalseid suuruseid iseloomustavad a) siht b) suund c) pikkus Vektoriks nimetatakse suunatud sirglõiku Vektori alguspunktiks on ja lõpp-punktiks
KORDMINE RIIGIEKSMIKS VII teema Vektor Joone võrrandid Vektoriaalseid suuruseid iseloomustavad a) siht b) suund c) pikkus Vektoriks nimetatakse suunatud sirglõiku Vektori alguspunktiks on ja lõpp-punktiks
KORDAMINE RIIGIEKSAMIKS V teema Vektor. Joone võrrandid.
 KORDMINE RIIGIEKSMIKS V teema Vektor Joone võrrandid Vektoriaalseid suuruseid iseloomustavad a) siht b) suund c) pikkus Vektoriks nimetatakse suunatud sirglõiku Vektori alguspunktiks on ja lõpp-punktiks
KORDMINE RIIGIEKSMIKS V teema Vektor Joone võrrandid Vektoriaalseid suuruseid iseloomustavad a) siht b) suund c) pikkus Vektoriks nimetatakse suunatud sirglõiku Vektori alguspunktiks on ja lõpp-punktiks
Teaduskool. Alalisvooluringid. Koostanud Kaljo Schults
 TARTU ÜLIKOOL Teaduskool Alalisvooluringid Koostanud Kaljo Schults Tartu 2008 Eessõna Käesoleva õppevahendi kasutajana on mõeldud eelkõige täppisteaduste vastu huvi tundvaid gümnaasiumi õpilasi, kes on
TARTU ÜLIKOOL Teaduskool Alalisvooluringid Koostanud Kaljo Schults Tartu 2008 Eessõna Käesoleva õppevahendi kasutajana on mõeldud eelkõige täppisteaduste vastu huvi tundvaid gümnaasiumi õpilasi, kes on
6.6 Ühtlaselt koormatud plaatide lihtsamad
 6.6. Ühtlaselt koormatud plaatide lihtsamad paindeülesanded 263 6.6 Ühtlaselt koormatud plaatide lihtsamad paindeülesanded 6.6.1 Silindriline paine Kui ristkülikuline plaat on pika ristküliku kujuline
6.6. Ühtlaselt koormatud plaatide lihtsamad paindeülesanded 263 6.6 Ühtlaselt koormatud plaatide lihtsamad paindeülesanded 6.6.1 Silindriline paine Kui ristkülikuline plaat on pika ristküliku kujuline
RF võimendite parameetrid
 RF võimendite parameetrid Raadiosageduslike võimendite võimendavaks elemendiks kasutatakse põhiliselt bipolaarvõi väljatransistori. Paraku on transistori võimendus sagedusest sõltuv, transistor on mittelineaarne
RF võimendite parameetrid Raadiosageduslike võimendite võimendavaks elemendiks kasutatakse põhiliselt bipolaarvõi väljatransistori. Paraku on transistori võimendus sagedusest sõltuv, transistor on mittelineaarne
Vektoralgebra seisukohalt võib ka selle võrduse kirja panna skalaarkorrutise
 Jõu töö Konstanse jõu tööks lõigul (nihkel) A A nimetatakse jõu mooduli korrutist teepikkusega s = A A ning jõu siirde vahelise nurga koosinusega Fscos ektoralgebra seisukohalt võib ka selle võrduse kirja
Jõu töö Konstanse jõu tööks lõigul (nihkel) A A nimetatakse jõu mooduli korrutist teepikkusega s = A A ning jõu siirde vahelise nurga koosinusega Fscos ektoralgebra seisukohalt võib ka selle võrduse kirja
Matemaatiline analüüs I iseseisvad ülesanded
 Matemaatiline analüüs I iseseisvad ülesanded Leidke funktsiooni y = log( ) + + 5 määramispiirkond Leidke funktsiooni y = + arcsin 5 määramispiirkond Leidke funktsiooni y = sin + 6 määramispiirkond 4 Leidke
Matemaatiline analüüs I iseseisvad ülesanded Leidke funktsiooni y = log( ) + + 5 määramispiirkond Leidke funktsiooni y = + arcsin 5 määramispiirkond Leidke funktsiooni y = sin + 6 määramispiirkond 4 Leidke
Graafiteooria üldmõisteid. Graaf G ( X, A ) Tippude hulk: X={ x 1, x 2,.., x n } Servade (kaarte) hulk: A={ a 1, a 2,.., a m } Orienteeritud graafid
 Tippude hulk: X={ x 1, x 2,.., x n } Servade (kaarte) hulk: A={ a 1, a 2,.., a m } Orienteeritud graafid") Graafiteooria üldmõisteid Graaf G ( X, A ) Tippude hulk: X={ x 1, x 2,.., x n } Servade (kaarte) hulk: A={ a 1, a 2,.., a m } Orienteeritud graafid Orienteerimata graafid G(x i )={ x k < x i, x k > A}
Graafiteooria üldmõisteid Graaf G ( X, A ) Tippude hulk: X={ x 1, x 2,.., x n } Servade (kaarte) hulk: A={ a 1, a 2,.., a m } Orienteeritud graafid Orienteerimata graafid G(x i )={ x k < x i, x k > A}
Koormus 14,4k. Joon
 + U toide + 15V U be T T 1 2 I=I juht I koorm 1mA I juht Koormus 14,4k I juht 1mA a b Joon. 3.2.9 on ette antud transistori T 1 kollektorvooluga. Selle transistori baasi-emitterpinge seadistub vastavalt
+ U toide + 15V U be T T 1 2 I=I juht I koorm 1mA I juht Koormus 14,4k I juht 1mA a b Joon. 3.2.9 on ette antud transistori T 1 kollektorvooluga. Selle transistori baasi-emitterpinge seadistub vastavalt
,millest avaldub 21) 23)
 23)") II kursus TRIGONOMEETRIA * laia matemaatika teemad TRIGONOMEETRILISTE FUNKTSIOONIDE PÕHISEOSED: sin α s α sin α + s α,millest avaldu s α sin α sα tan α, * t α,millest järeldu * tα s α tα tan α + s α Ülesanne.
II kursus TRIGONOMEETRIA * laia matemaatika teemad TRIGONOMEETRILISTE FUNKTSIOONIDE PÕHISEOSED: sin α s α sin α + s α,millest avaldu s α sin α sα tan α, * t α,millest järeldu * tα s α tα tan α + s α Ülesanne.
1 Funktsioon, piirväärtus, pidevus
 Funktsioon, piirväärtus, pidevus. Funktsioon.. Tähistused Arvuhulki tähistatakse üldlevinud viisil: N - naturaalarvude hulk, Z - täisarvude hulk, Q - ratsionaalarvude hulk, R - reaalarvude hulk. Piirkonnaks
Funktsioon, piirväärtus, pidevus. Funktsioon.. Tähistused Arvuhulki tähistatakse üldlevinud viisil: N - naturaalarvude hulk, Z - täisarvude hulk, Q - ratsionaalarvude hulk, R - reaalarvude hulk. Piirkonnaks
Mitmest lülist koosneva mehhanismi punktide kiiruste ja kiirenduste leidmine
 TALLINNA TEHNIKAÜLIKOOL MEHAANIKAINSTITUUT Dünaamika kodutöö nr. 1 Mitmest lülist koosnea mehhanismi punktide kiiruste ja kiirenduste leidmine ariant ZZ Lahendusnäide Üliõpilane: Xxx Yyy Üliõpilase kood:
TALLINNA TEHNIKAÜLIKOOL MEHAANIKAINSTITUUT Dünaamika kodutöö nr. 1 Mitmest lülist koosnea mehhanismi punktide kiiruste ja kiirenduste leidmine ariant ZZ Lahendusnäide Üliõpilane: Xxx Yyy Üliõpilase kood:
Arvuteooria. Diskreetse matemaatika elemendid. Sügis 2008
 Sügis 2008 Jaguvus Olgu a ja b täisarvud. Kui leidub selline täisarv m, et b = am, siis ütleme, et arv a jagab arvu b ehk arv b jagub arvuga a. Tähistused: a b b. a Näiteks arv a jagab arvu b arv b jagub
Sügis 2008 Jaguvus Olgu a ja b täisarvud. Kui leidub selline täisarv m, et b = am, siis ütleme, et arv a jagab arvu b ehk arv b jagub arvuga a. Tähistused: a b b. a Näiteks arv a jagab arvu b arv b jagub
ITI 0041 Loogika arvutiteaduses Sügis 2005 / Tarmo Uustalu Loeng 4 PREDIKAATLOOGIKA
 PREDIKAATLOOGIKA Predikaatloogika on lauseloogika tugev laiendus. Predikaatloogikas saab nimetada asju ning rääkida nende omadustest. Väljendusvõimsuselt on predikaatloogika seega oluliselt peenekoelisem
PREDIKAATLOOGIKA Predikaatloogika on lauseloogika tugev laiendus. Predikaatloogikas saab nimetada asju ning rääkida nende omadustest. Väljendusvõimsuselt on predikaatloogika seega oluliselt peenekoelisem
Tuletis ja diferentsiaal
 Peatükk 3 Tuletis ja diferentsiaal 3.1 Tuletise ja diferentseeruva funktsiooni mõisted. Olgu antud funktsioon f ja kuulugu punkt a selle funktsiooni määramispiirkonda. Tuletis ja diferentseeruv funktsioon.
Peatükk 3 Tuletis ja diferentsiaal 3.1 Tuletise ja diferentseeruva funktsiooni mõisted. Olgu antud funktsioon f ja kuulugu punkt a selle funktsiooni määramispiirkonda. Tuletis ja diferentseeruv funktsioon.
Vektorid. A=( A x, A y, A z ) Vektor analüütilises geomeetrias
 Vektor analüütilises geomeetrias") ektorid Matemaatikas tähistab vektor vektorruumi elementi. ektorruum ja vektor on defineeritud väga laialt, kuid praktikas võime vektorit ette kujutada kui kindla arvu liikmetega järjestatud arvuhulka.
ektorid Matemaatikas tähistab vektor vektorruumi elementi. ektorruum ja vektor on defineeritud väga laialt, kuid praktikas võime vektorit ette kujutada kui kindla arvu liikmetega järjestatud arvuhulka.
HULGATEOORIA ELEMENTE
 HULGATEOORIA ELEMENTE Teema 2.2. Hulga elementide loendamine Jaan Penjam, email: jaan@cs.ioc.ee Diskreetne Matemaatika II: Hulgateooria 1 / 31 Loengu kava 2 Hulga elementide loendamine Hulga võimsus Loenduvad
HULGATEOORIA ELEMENTE Teema 2.2. Hulga elementide loendamine Jaan Penjam, email: jaan@cs.ioc.ee Diskreetne Matemaatika II: Hulgateooria 1 / 31 Loengu kava 2 Hulga elementide loendamine Hulga võimsus Loenduvad
Koduseid ülesandeid IMO 2017 Eesti võistkonna kandidaatidele vol 4 lahendused
 Koduseid ülesandeid IMO 017 Eesti võistkonna kandidaatidele vol 4 lahendused 17. juuni 017 1. Olgu a,, c positiivsed reaalarvud, nii et ac = 1. Tõesta, et a 1 + 1 ) 1 + 1 ) c 1 + 1 ) 1. c a Lahendus. Kuna
Koduseid ülesandeid IMO 017 Eesti võistkonna kandidaatidele vol 4 lahendused 17. juuni 017 1. Olgu a,, c positiivsed reaalarvud, nii et ac = 1. Tõesta, et a 1 + 1 ) 1 + 1 ) c 1 + 1 ) 1. c a Lahendus. Kuna
Kontekstivabad keeled
 Kontekstivabad keeled Teema 2.1 Jaan Penjam, email: jaan@cs.ioc.ee Rekursiooni- ja keerukusteooria: KV keeled 1 / 27 Loengu kava 1 Kontekstivabad grammatikad 2 Süntaksipuud 3 Chomsky normaalkuju Jaan Penjam,
Kontekstivabad keeled Teema 2.1 Jaan Penjam, email: jaan@cs.ioc.ee Rekursiooni- ja keerukusteooria: KV keeled 1 / 27 Loengu kava 1 Kontekstivabad grammatikad 2 Süntaksipuud 3 Chomsky normaalkuju Jaan Penjam,
; y ) vektori lõpppunkt, siis
 vektori lõpppunkt, siis") III kusus VEKTOR TASANDIL. JOONE VÕRRAND *laia matemaatika teemad. Vektoi mõiste, -koodinaadid ja pikkus: http://www.allaveelmaa.com/ematejalid/vekto-koodinaadid-pikkus.pdf Vektoite lahutamine: http://allaveelmaa.com/ematejalid/lahutaminenull.pdf
III kusus VEKTOR TASANDIL. JOONE VÕRRAND *laia matemaatika teemad. Vektoi mõiste, -koodinaadid ja pikkus: http://www.allaveelmaa.com/ematejalid/vekto-koodinaadid-pikkus.pdf Vektoite lahutamine: http://allaveelmaa.com/ematejalid/lahutaminenull.pdf
Veaarvutus ja määramatus
 TARTU ÜLIKOOL Tartu Ülikooli Teaduskool Veaarvutus ja määramatus Urmo Visk Tartu 2005 Sisukord 1 Tähistused 2 2 Sissejuhatus 3 3 Viga 4 3.1 Mõõteriistade vead................................... 4 3.2 Tehted
TARTU ÜLIKOOL Tartu Ülikooli Teaduskool Veaarvutus ja määramatus Urmo Visk Tartu 2005 Sisukord 1 Tähistused 2 2 Sissejuhatus 3 3 Viga 4 3.1 Mõõteriistade vead................................... 4 3.2 Tehted
MATEMAATILISEST LOOGIKAST (Lausearvutus)
") TARTU ÜLIKOOL Teaduskool MATEMAATILISEST LOOGIKAST (Lausearvutus) Õppematerjal TÜ Teaduskooli õpilastele Koostanud E. Mitt TARTU 2003 1. LAUSE MÕISTE Matemaatilise loogika ühe osa - lausearvutuse - põhiliseks
TARTU ÜLIKOOL Teaduskool MATEMAATILISEST LOOGIKAST (Lausearvutus) Õppematerjal TÜ Teaduskooli õpilastele Koostanud E. Mitt TARTU 2003 1. LAUSE MÕISTE Matemaatilise loogika ühe osa - lausearvutuse - põhiliseks
Digi-TV vastuvõtt Espoo saatjalt
 Digi-TV vastuvõtt Espoo saatjalt Digi-TV vastuvõtuks Soomest on võimalik kasutada Espoo ja Fiskars saatjate signaali. Kuna Espoo signaal on üldjuhul tugevam, siis kasutatakse vastuvõtuks põhiliselt just
Digi-TV vastuvõtt Espoo saatjalt Digi-TV vastuvõtuks Soomest on võimalik kasutada Espoo ja Fiskars saatjate signaali. Kuna Espoo signaal on üldjuhul tugevam, siis kasutatakse vastuvõtuks põhiliselt just
sin 2 α + cos 2 sin cos cos 2α = cos² - sin² tan 2α =
 KORDAMINE RIIGIEKSAMIKS III TRIGONOMEETRIA ) põhiseosed sin α + cos sin cos α =, tanα =, cotα =, cos sin + tan =, tanα cotα = cos ) trigonomeetriliste funktsioonide täpsed väärtused α 5 6 9 sin α cos α
KORDAMINE RIIGIEKSAMIKS III TRIGONOMEETRIA ) põhiseosed sin α + cos sin cos α =, tanα =, cotα =, cos sin + tan =, tanα cotα = cos ) trigonomeetriliste funktsioonide täpsed väärtused α 5 6 9 sin α cos α
2017/2018. õa keemiaolümpiaadi piirkonnavooru lahendused klass
 2017/2018. õa keemiaolümpiaadi piirkonnavooru lahendused 11. 12. klass 18 g 1. a) N = 342 g/mol 6,022 1023 molekuli/mol = 3,2 10 22 molekuli b) 12 H 22 O 11 + 12O 2 = 12O 2 + 11H 2 O c) V = nrt p d) ΔH
2017/2018. õa keemiaolümpiaadi piirkonnavooru lahendused 11. 12. klass 18 g 1. a) N = 342 g/mol 6,022 1023 molekuli/mol = 3,2 10 22 molekuli b) 12 H 22 O 11 + 12O 2 = 12O 2 + 11H 2 O c) V = nrt p d) ΔH
Elastsusteooria tasandülesanne
 Peatükk 5 Eastsusteooria tasandüesanne 143 5.1. Tasandüesande mõiste 144 5.1 Tasandüesande mõiste Seeks, et iseoomustada pingust või deformatsiooni eastse keha punktis kasutatakse peapinge ja peadeformatsiooni
Peatükk 5 Eastsusteooria tasandüesanne 143 5.1. Tasandüesande mõiste 144 5.1 Tasandüesande mõiste Seeks, et iseoomustada pingust või deformatsiooni eastse keha punktis kasutatakse peapinge ja peadeformatsiooni
Sirgete varraste vääne
 1 Peatükk 8 Sirgete varraste vääne 8.1. Sissejuhatus ja lahendusmeetod 8-8.1 Sissejuhatus ja lahendusmeetod Käesoleva loengukonspekti alajaotuses.10. käsitleti väändepingete leidmist ümarvarrastes ja alajaotuses.10.3
1 Peatükk 8 Sirgete varraste vääne 8.1. Sissejuhatus ja lahendusmeetod 8-8.1 Sissejuhatus ja lahendusmeetod Käesoleva loengukonspekti alajaotuses.10. käsitleti väändepingete leidmist ümarvarrastes ja alajaotuses.10.3
(Raud)betoonkonstruktsioonide üldkursus 33
betoonkonstruktsioonide üldkursus 33") (Raud)betoonkonstruktsioonide üldkursus 33 Normaallõike tugevusarvutuse alused. Arvutuslikud pinge-deormatsioonidiagrammid Elemendi normaallõige (ristlõige) on elemendi pikiteljega risti olev lõige (s.o.
(Raud)betoonkonstruktsioonide üldkursus 33 Normaallõike tugevusarvutuse alused. Arvutuslikud pinge-deormatsioonidiagrammid Elemendi normaallõige (ristlõige) on elemendi pikiteljega risti olev lõige (s.o.
6 Mitme muutuja funktsioonid
 6 Mitme muutu funktsioonid Reaalarvude järjestatud paaride (x, ) hulga tasandi punktide hulga vahel on üksühene vastavus, st igale paarile vastab üks kindel punkt tasandil igale tasandi punktile vastavad
6 Mitme muutu funktsioonid Reaalarvude järjestatud paaride (x, ) hulga tasandi punktide hulga vahel on üksühene vastavus, st igale paarile vastab üks kindel punkt tasandil igale tasandi punktile vastavad
4.2.5 Täiustatud meetod tuletõkestusvõime määramiseks
 4.2.5 Täiustatud meetod tuletõkestusvõime määramiseks 4.2.5.1 Ülevaade See täiustatud arvutusmeetod põhineb mahukate katsete tulemustel ja lõplike elementide meetodiga tehtud arvutustel [4.16], [4.17].
4.2.5 Täiustatud meetod tuletõkestusvõime määramiseks 4.2.5.1 Ülevaade See täiustatud arvutusmeetod põhineb mahukate katsete tulemustel ja lõplike elementide meetodiga tehtud arvutustel [4.16], [4.17].
Deformatsioon ja olekuvõrrandid
 Peatükk 3 Deformatsioon ja olekuvõrrandid 3.. Siire ja deformatsioon 3-2 3. Siire ja deformatsioon 3.. Cauchy seosed Vaatleme deformeeruva keha meelevaldset punkti A. Algolekusontemakoor- dinaadid x, y,
Peatükk 3 Deformatsioon ja olekuvõrrandid 3.. Siire ja deformatsioon 3-2 3. Siire ja deformatsioon 3.. Cauchy seosed Vaatleme deformeeruva keha meelevaldset punkti A. Algolekusontemakoor- dinaadid x, y,
Kui ühtlase liikumise kiirus on teada, saab aja t jooksul läbitud teepikkuse arvutada valemist
 KOOLIFÜÜSIKA: MEHAANIKA (kaugõppele). KINEMAATIKA. Ühtlane liikumine Punktmass Punktmassiks me nimetame keha, mille mõõtmeid me antud liikumise juures ei pruugi arestada. Sel juhul loemegi keha tema asukoha
KOOLIFÜÜSIKA: MEHAANIKA (kaugõppele). KINEMAATIKA. Ühtlane liikumine Punktmass Punktmassiks me nimetame keha, mille mõõtmeid me antud liikumise juures ei pruugi arestada. Sel juhul loemegi keha tema asukoha
REAALAINETE KESKUS JAAK SÄRAK
 REAALAINETE KESKUS JAAK SÄRAK TALLINN 2006 1 DESCRIPTIVE GEOMETRY Study aid for daily and distance learning courses Compiler Jaak Särak Edited by Tallinn College of Engineering This publication is meant
REAALAINETE KESKUS JAAK SÄRAK TALLINN 2006 1 DESCRIPTIVE GEOMETRY Study aid for daily and distance learning courses Compiler Jaak Särak Edited by Tallinn College of Engineering This publication is meant
HSM TT 1578 EST 6720 611 954 EE (04.08) RBLV 4682-00.1/G
 RBLV 4682-00.1/G") HSM TT 1578 EST 682-00.1/G 6720 611 95 EE (0.08) RBLV Sisukord Sisukord Ohutustehnika alased nõuanded 3 Sümbolite selgitused 3 1. Seadme andmed 1. 1. Tarnekomplekt 1. 2. Tehnilised andmed 1. 3. Tarvikud
HSM TT 1578 EST 682-00.1/G 6720 611 95 EE (0.08) RBLV Sisukord Sisukord Ohutustehnika alased nõuanded 3 Sümbolite selgitused 3 1. Seadme andmed 1. 1. Tarnekomplekt 1. 2. Tehnilised andmed 1. 3. Tarvikud
Eesti koolinoorte XLVIII täppisteaduste olümpiaadi
 Eesti koolinoorte XLVIII täppisteaduste olümpiaadi lõppvoor MATEMAATIKAS Tartus, 9. märtsil 001. a. Lahendused ja vastused IX klass 1. Vastus: x = 171. Teisendame võrrandi kujule 111(4 + x) = 14 45 ning
Eesti koolinoorte XLVIII täppisteaduste olümpiaadi lõppvoor MATEMAATIKAS Tartus, 9. märtsil 001. a. Lahendused ja vastused IX klass 1. Vastus: x = 171. Teisendame võrrandi kujule 111(4 + x) = 14 45 ning
PLASTSED DEFORMATSIOONID
 PLAED DEFORMAIOONID Misese vlavustingimus (pinegte ruumis) () Dimensineerimisega saab kõrvaldada ainsa materjali parameetri. Purunemise (tugevuse) kriteeriumid:. Maksimaalse pinge kirteerium Laminaat puruneb
PLAED DEFORMAIOONID Misese vlavustingimus (pinegte ruumis) () Dimensineerimisega saab kõrvaldada ainsa materjali parameetri. Purunemise (tugevuse) kriteeriumid:. Maksimaalse pinge kirteerium Laminaat puruneb
Kirjeldab kuidas toimub programmide täitmine Tähendus spetsifitseeritakse olekuteisendussüsteemi abil Loomulik semantika
 Operatsioonsemantika Kirjeldab kuidas toimub programmide täitmine Tähendus spetsifitseeritakse olekuteisendussüsteemi abil Loomulik semantika kirjeldab kuidas j~outakse l~oppolekusse Struktuurne semantika
Operatsioonsemantika Kirjeldab kuidas toimub programmide täitmine Tähendus spetsifitseeritakse olekuteisendussüsteemi abil Loomulik semantika kirjeldab kuidas j~outakse l~oppolekusse Struktuurne semantika
Ülesanne 4.1. Õhukese raudbetoonist gravitatsioontugiseina arvutus
 Ülesanne 4.1. Õhukese raudbetoonist gravitatsioontugiseina arvutus Antud: Õhuke raudbetoonist gravitatsioontugisein maapinna kõrguste vahega h = 4,5 m ja taldmiku sügavusega d = 1,5 m. Maapinnal tugiseina
Ülesanne 4.1. Õhukese raudbetoonist gravitatsioontugiseina arvutus Antud: Õhuke raudbetoonist gravitatsioontugisein maapinna kõrguste vahega h = 4,5 m ja taldmiku sügavusega d = 1,5 m. Maapinnal tugiseina
Compress 6000 LW Bosch Compress LW C 35 C A ++ A + A B C D E F G. db kw kw /2013
 55 C 35 C A A B C D E F G 50 11 12 11 11 10 11 db kw kw db 2015 811/2013 A A B C D E F G 2015 811/2013 Toote energiatarbe kirjeldus Järgmised toote andmed vastavad nõuetele, mis on esitatud direktiivi
55 C 35 C A A B C D E F G 50 11 12 11 11 10 11 db kw kw db 2015 811/2013 A A B C D E F G 2015 811/2013 Toote energiatarbe kirjeldus Järgmised toote andmed vastavad nõuetele, mis on esitatud direktiivi
Vektori u skalaarkorrutist iseendaga nimetatakse selle vektori skalaarruuduks ja tähistatakse (u ) 2 või u 2 u. u v cos α = u 2 + v 2 PQ 2
 2 või u 2 u. u v cos α = u 2 + v 2 PQ 2") Vektorite sklrkorrutis Vtleme füüsikkursusest tuntud olukord, kus kehle mõjub jõud F r j keh teeb selle jõu mõjul nihke s Konkreetsuse huvides olgu kehks rööbsteel liikuv vgun Jõud F r mõjugu vgunile rööbstee
Vektorite sklrkorrutis Vtleme füüsikkursusest tuntud olukord, kus kehle mõjub jõud F r j keh teeb selle jõu mõjul nihke s Konkreetsuse huvides olgu kehks rööbsteel liikuv vgun Jõud F r mõjugu vgunile rööbstee
Kehade soojendamisel või jahutamisel võib keha minna ühest agregaatolekust teise. Selliseid üleminekuid nimetatakse faasisiireteks.
 KOOLIFÜÜSIKA: SOOJUS 3 (kaugõppele) 6. FAASISIIRDED Kehade sooendamisel või ahutamisel võib keha minna ühest agregaatolekust teise. Selliseid üleminekuid nimetatakse faasisiireteks. Sooendamisel vaaminev
KOOLIFÜÜSIKA: SOOJUS 3 (kaugõppele) 6. FAASISIIRDED Kehade sooendamisel või ahutamisel võib keha minna ühest agregaatolekust teise. Selliseid üleminekuid nimetatakse faasisiireteks. Sooendamisel vaaminev
Φ 1 =Φ 0 S 2. Joonis 3.1. Trafo ehitus ja idealiseeritud tühijooksu faasordiagramm
 61 3. TRAFOD 3.1.Trafo töötamispõhimõte Trafo ehk transformaator on seade, mis muundab vahelduvvoolu elektrienergiat ühelt pingetasemelt (voltage level) teisele pingetasemele magnetvälja abil. äiteks 10kV
61 3. TRAFOD 3.1.Trafo töötamispõhimõte Trafo ehk transformaator on seade, mis muundab vahelduvvoolu elektrienergiat ühelt pingetasemelt (voltage level) teisele pingetasemele magnetvälja abil. äiteks 10kV
TARTU ÜLIKOOL Teaduskool. Võnkumised ja lained. Koostanud Henn Voolaid
 TARTU ÜLIKOOL Teaduskool Võnkumised ja lained Koostanud Henn Voolaid Tartu 2008 Eessõna Käesoleva õppevahendi kasutajana on mõeldud eelkõige täppisteaduste vastu huvi tundvaid gümnaasiumi õpilasi, kes
TARTU ÜLIKOOL Teaduskool Võnkumised ja lained Koostanud Henn Voolaid Tartu 2008 Eessõna Käesoleva õppevahendi kasutajana on mõeldud eelkõige täppisteaduste vastu huvi tundvaid gümnaasiumi õpilasi, kes
Joonis 1. Teist järku aperioodilise lüli ülekandefunktsiooni saab teisendada võnkelüli ülekandefunktsiooni kujul, kui
 Ülesnded j lhendused utomtjuhtimisest Ülesnne. Süsteem oosneb hest jdmisi ühendtud erioodilisest lülist, mille jonstndid on 0,08 j 0,5 ning õimendustegurid stlt 0 j 50. Leid süsteemi summrne ülendefuntsioon.
Ülesnded j lhendused utomtjuhtimisest Ülesnne. Süsteem oosneb hest jdmisi ühendtud erioodilisest lülist, mille jonstndid on 0,08 j 0,5 ning õimendustegurid stlt 0 j 50. Leid süsteemi summrne ülendefuntsioon.
KOMBINATSIOONID, PERMUTATSIOOND JA BINOOMKORDAJAD
 KOMBINATSIOONID, PERMUTATSIOOND JA BINOOMKORDAJAD Teema 3.1 (Õpiku peatükid 1 ja 3) Jaan Penjam, email: jaan@cs.ioc.ee Diskreetne Matemaatika II: Kombinatoorika 1 / 31 Loengu kava 1 Tähistusi 2 Kombinatoorsed
KOMBINATSIOONID, PERMUTATSIOOND JA BINOOMKORDAJAD Teema 3.1 (Õpiku peatükid 1 ja 3) Jaan Penjam, email: jaan@cs.ioc.ee Diskreetne Matemaatika II: Kombinatoorika 1 / 31 Loengu kava 1 Tähistusi 2 Kombinatoorsed
DEF. Kolmnurgaks nim hulknurka, millel on 3 tippu. / Kolmnurgaks nim tasandi osa, mida piiravad kolme erinevat punkti ühendavad lõigud.
 Kolmnurk 1 KOLMNURK DEF. Kolmnurgaks nim hulknurka, millel on 3 tippu. / Kolmnurgaks nim tasandi osa, mida piiravad kolme erinevat punkti ühendavad lõigud. Kolmnurga tippe tähistatakse nagu punkte ikka
Kolmnurk 1 KOLMNURK DEF. Kolmnurgaks nim hulknurka, millel on 3 tippu. / Kolmnurgaks nim tasandi osa, mida piiravad kolme erinevat punkti ühendavad lõigud. Kolmnurga tippe tähistatakse nagu punkte ikka
NÄIDE KODUTÖÖ TALLINNA TEHNIKAÜLIKOOL. Elektriajamite ja jõuelektroonika instituut. AAR0030 Sissejuhatus robotitehnikasse
 TALLINNA TEHNIKAÜLIKOOL Elektriajamite ja jõuelektroonika instituut AAR000 Sissejuhatus robotitehnikasse KODUTÖÖ Teemal: Tööstusroboti Mitsubishi RV-6SD kinemaatika ja juhtimine Tudeng: Aleksei Tepljakov
TALLINNA TEHNIKAÜLIKOOL Elektriajamite ja jõuelektroonika instituut AAR000 Sissejuhatus robotitehnikasse KODUTÖÖ Teemal: Tööstusroboti Mitsubishi RV-6SD kinemaatika ja juhtimine Tudeng: Aleksei Tepljakov
Algebraliste võrrandite lahenduvus radikaalides. Raido Paas Juhendaja: Mart Abel
 Algebraliste võrrandite lahenduvus radikaalides Magistritöö Raido Paas Juhendaja: Mart Abel Tartu 2013 Sisukord Sissejuhatus Ajalooline sissejuhatus iii v 1 Rühmateooria elemente 1 1.1 Substitutsioonide
Algebraliste võrrandite lahenduvus radikaalides Magistritöö Raido Paas Juhendaja: Mart Abel Tartu 2013 Sisukord Sissejuhatus Ajalooline sissejuhatus iii v 1 Rühmateooria elemente 1 1.1 Substitutsioonide
Lisa 2 ÜLEVAADE HALJALA VALLA METSADEST Koostanud veebruar 2008 Margarete Merenäkk ja Mati Valgepea, Metsakaitse- ja Metsauuenduskeskus
 Lisa 2 ÜLEVAADE HALJALA VALLA METSADEST Koostanud veebruar 2008 Margarete Merenäkk ja Mati Valgepea, Metsakaitse- ja Metsauuenduskeskus 1. Haljala valla metsa pindala Haljala valla üldpindala oli Maa-Ameti
Lisa 2 ÜLEVAADE HALJALA VALLA METSADEST Koostanud veebruar 2008 Margarete Merenäkk ja Mati Valgepea, Metsakaitse- ja Metsauuenduskeskus 1. Haljala valla metsa pindala Haljala valla üldpindala oli Maa-Ameti
Pinge. 2.1 Jõud ja pinged
 Peatükk 2 Pinge 1 2.1. Jõud ja pinged 2-2 2.1 Jõud ja pinged Kehale mõjuvad välisjõud saab jagada kahte rühma. 1. Pindjõud ehk kontaktjõud on põhjustatud keha kontaktist teiste kehade või keskkondadega.
Peatükk 2 Pinge 1 2.1. Jõud ja pinged 2-2 2.1 Jõud ja pinged Kehale mõjuvad välisjõud saab jagada kahte rühma. 1. Pindjõud ehk kontaktjõud on põhjustatud keha kontaktist teiste kehade või keskkondadega.
1 Kompleksarvud Imaginaararvud Praktiline väärtus Kõige ilusam valem? Kompleksarvu erinevad kujud...
 Marek Kolk, Tartu Ülikool, 2012 1 Kompleksarvud Tegemist on failiga, kuhu ma olen kogunud enda arvates huvitavat ja esiletõstmist vajavat materjali ning on mõeldud lugeja teadmiste täiendamiseks. Seega
Marek Kolk, Tartu Ülikool, 2012 1 Kompleksarvud Tegemist on failiga, kuhu ma olen kogunud enda arvates huvitavat ja esiletõstmist vajavat materjali ning on mõeldud lugeja teadmiste täiendamiseks. Seega
Skalaar, vektor, tensor
 Peatükk 2 Skalaar, vektor, tensor 1 2.1. Sissejuhatus 2-2 2.1 Sissejuhatus Skalaar Üks arv, mille väärtus ei sõltu koordinaatsüsteemi (baasi) valikust Tüüpiline näide temperatuur Vektor Füüsikaline suurus,
Peatükk 2 Skalaar, vektor, tensor 1 2.1. Sissejuhatus 2-2 2.1 Sissejuhatus Skalaar Üks arv, mille väärtus ei sõltu koordinaatsüsteemi (baasi) valikust Tüüpiline näide temperatuur Vektor Füüsikaline suurus,
Jätkusuutlikud isolatsioonilahendused. U-arvude koondtabel. VÄLISSEIN - COLUMBIA TÄISVALATUD ÕÕNESPLOKK 190 mm + SOOJUSTUS + KROHV
 U-arvude koondtabel lk 1 lk 2 lk 3 lk 4 lk 5 lk 6 lk 7 lk 8 lk 9 lk 10 lk 11 lk 12 lk 13 lk 14 lk 15 lk 16 VÄLISSEIN - FIBO 3 CLASSIC 200 mm + SOOJUSTUS + KROHV VÄLISSEIN - AEROC CLASSIC 200 mm + SOOJUSTUS
U-arvude koondtabel lk 1 lk 2 lk 3 lk 4 lk 5 lk 6 lk 7 lk 8 lk 9 lk 10 lk 11 lk 12 lk 13 lk 14 lk 15 lk 16 VÄLISSEIN - FIBO 3 CLASSIC 200 mm + SOOJUSTUS + KROHV VÄLISSEIN - AEROC CLASSIC 200 mm + SOOJUSTUS
PEATÜKK 5 LUMEKOORMUS KATUSEL. 5.1 Koormuse iseloom. 5.2 Koormuse paiknemine
 PEATÜKK 5 LUMEKOORMUS KATUSEL 5.1 Koormuse iseloom (1) P Projekt peab arvestama asjaolu, et lumi võib katustele sadestuda paljude erinevate mudelite kohaselt. (2) Erinevate mudelite rakendumise põhjuseks
PEATÜKK 5 LUMEKOORMUS KATUSEL 5.1 Koormuse iseloom (1) P Projekt peab arvestama asjaolu, et lumi võib katustele sadestuda paljude erinevate mudelite kohaselt. (2) Erinevate mudelite rakendumise põhjuseks
KATEGOORIATEOORIA. Kevad 2010
 KTEGOORITEOORI Kevad 2010 Loengukonspekt Lektor: Valdis Laan 1 1. Kategooriad 1.1. Hulgateoreetilistest alustest On hästi teada, et kõigi hulkade hulka ei ole olemas. Samas kategooriateoorias sooviks me
KTEGOORITEOORI Kevad 2010 Loengukonspekt Lektor: Valdis Laan 1 1. Kategooriad 1.1. Hulgateoreetilistest alustest On hästi teada, et kõigi hulkade hulka ei ole olemas. Samas kategooriateoorias sooviks me
Eesti koolinoorte XLI täppisteaduste olümpiaad
 Eesti koolinoorte XLI täppisteaduste olümpiaad MATEMAATIKA III VOOR 6. märts 994. a. Lahendused ja vastused IX klass.. Vastus: a) neljapäev; b) teisipäev, kolmapäev, reede või laupäev. a) Et poiste luiskamise
Eesti koolinoorte XLI täppisteaduste olümpiaad MATEMAATIKA III VOOR 6. märts 994. a. Lahendused ja vastused IX klass.. Vastus: a) neljapäev; b) teisipäev, kolmapäev, reede või laupäev. a) Et poiste luiskamise
5. OPTIMEERIMISÜLESANDED MAJANDUSES
 5. OPTIMEERIMISÜLESNDED MJNDUSES nts asma Sissejuhatus Majanduses, aga ka mitmete igapäevaste probleemide lahendamisel on piiratud võimalusi arvestades vaja leida võimalikult kasulik toimimisviis. Ettevõtete,
5. OPTIMEERIMISÜLESNDED MJNDUSES nts asma Sissejuhatus Majanduses, aga ka mitmete igapäevaste probleemide lahendamisel on piiratud võimalusi arvestades vaja leida võimalikult kasulik toimimisviis. Ettevõtete,
2.1. Jõud ja pinged 2-2
 1 Peatükk 2 Pinge 2.1. Jõud ja pinged 2-2 2.1 Jõud ja pinged Kehale mõjuvad välisjõud saab jagada kahte rühma. 1. Pindjõud ehk kontaktjõud on põhjustatud keha kontaktist teiste kehade või keskkondadega.
1 Peatükk 2 Pinge 2.1. Jõud ja pinged 2-2 2.1 Jõud ja pinged Kehale mõjuvad välisjõud saab jagada kahte rühma. 1. Pindjõud ehk kontaktjõud on põhjustatud keha kontaktist teiste kehade või keskkondadega.
Ehitusmehaanika. EST meetod
 Ehitusmehaanika. EST meetod Staatikaga määramatu kahe avaga raam /44 4 m q = 8 kn/m 00000000000000000000000 2 EI 4 EI 6 r r F EI p EI = 0 kn p EI p 2 m 00 6 m 00 6 m Andres Lahe Mehaanikainstituut Tallinna
Ehitusmehaanika. EST meetod Staatikaga määramatu kahe avaga raam /44 4 m q = 8 kn/m 00000000000000000000000 2 EI 4 EI 6 r r F EI p EI = 0 kn p EI p 2 m 00 6 m 00 6 m Andres Lahe Mehaanikainstituut Tallinna
ANTENNID JA RF ELEKTROONIKA. Sisukord. Loengumaterjalid Koostanud: ass. Sulev Reisberg ja prof. Andres Taklaja
 ANTENNID JA RF ELEKTROONIKA Loengumaterjalid Koostanud: ass. Sulev Reisberg ja prof. Andres Taklaja Sisukord. Antennide tüübid... 3. Antennide parameetrid... 4 Antenni kasutegur... 4 Suunategur (directivity)...
ANTENNID JA RF ELEKTROONIKA Loengumaterjalid Koostanud: ass. Sulev Reisberg ja prof. Andres Taklaja Sisukord. Antennide tüübid... 3. Antennide parameetrid... 4 Antenni kasutegur... 4 Suunategur (directivity)...
MATEMAATIKA AJALUGU MTMM MTMM
 Õppejõud: vanemteadur Mart Abel Õppejõud: vanemteadur Mart Abel Loenguid: 14 Õppejõud: vanemteadur Mart Abel Loenguid: 14 Seminare: 2 Õppejõud: vanemteadur Mart Abel Loenguid: 14 Seminare: 2 Hindamine:
Õppejõud: vanemteadur Mart Abel Õppejõud: vanemteadur Mart Abel Loenguid: 14 Õppejõud: vanemteadur Mart Abel Loenguid: 14 Seminare: 2 Õppejõud: vanemteadur Mart Abel Loenguid: 14 Seminare: 2 Hindamine:
1.1. NATURAAL-, TÄIS- JA RATSIONAALARVUD
 1. Reaalarvud 1.1. NATURAAL-, TÄIS- JA RATSIONAALARVUD Arvu mõiste hakkas kujunema aastatuhandeid tagasi, täiustudes ja üldistudes koos inimkonna arenguga. Juba ürgühiskonnas tekkis vajadus teatavaid hulki
1. Reaalarvud 1.1. NATURAAL-, TÄIS- JA RATSIONAALARVUD Arvu mõiste hakkas kujunema aastatuhandeid tagasi, täiustudes ja üldistudes koos inimkonna arenguga. Juba ürgühiskonnas tekkis vajadus teatavaid hulki
Skalaar, vektor, tensor
 Peatükk 2 Skalaar, vektor, tensor 1 2.1. Sissejuhatus 2-2 2.1 Sissejuhatus Skalaar Üks arv, mille väärtus ei sõltu koordinaatsüsteemi (baasi) valikust Tüüpiline näide temperatuur Vektor Füüsikaline suurus,
Peatükk 2 Skalaar, vektor, tensor 1 2.1. Sissejuhatus 2-2 2.1 Sissejuhatus Skalaar Üks arv, mille väärtus ei sõltu koordinaatsüsteemi (baasi) valikust Tüüpiline näide temperatuur Vektor Füüsikaline suurus,
6 Vahelduvvool. 6.1 Vahelduvvoolu mõiste. Vahelduvvooluks nimetatakse voolu, mille suund ja tugevus ajas perioodiliselt muutub.
 6 Vahelduvvool 6 Vahelduvvoolu õiste Vahelduvvooluks nietatakse voolu, ille suund ja tugevus ajas perioodiliselt uutub Tänapäeva elektrijaotusvõrkudes on kasutusel vahelduvvool Alalisvoolu kasutatakse
6 Vahelduvvool 6 Vahelduvvoolu õiste Vahelduvvooluks nietatakse voolu, ille suund ja tugevus ajas perioodiliselt uutub Tänapäeva elektrijaotusvõrkudes on kasutusel vahelduvvool Alalisvoolu kasutatakse
Sisukord. 4 Tõenäosuse piirteoreemid 36
 Sisukord Sündmused ja tõenäosused 5. Sündmused................................... 5.2 Tõenäosus.................................... 8.2. Tõenäosuse arvutamise konkreetsed meetodid (üldise definitsiooni
Sisukord Sündmused ja tõenäosused 5. Sündmused................................... 5.2 Tõenäosus.................................... 8.2. Tõenäosuse arvutamise konkreetsed meetodid (üldise definitsiooni
Energiabilanss netoenergiavajadus
 Energiabilanss netoenergiajadus 1/26 Eelmisel loengul soojuskadude arvutus (võimsus) φ + + + tot = φ φ φ juht v inf φ sv Energia = tunnivõimsuste summa kwh Netoenergiajadus (ruumis), energiakasutus (tehnosüsteemis)
Energiabilanss netoenergiajadus 1/26 Eelmisel loengul soojuskadude arvutus (võimsus) φ + + + tot = φ φ φ juht v inf φ sv Energia = tunnivõimsuste summa kwh Netoenergiajadus (ruumis), energiakasutus (tehnosüsteemis)
VFR navigatsioon I (Mõisted ja elemendid I)
") VFR navigatsioon I (Mõisted ja elemendid I) 1. Suunad ja nende tähistamine. 2. Maakera ja sellega seonduv. 3. Maa magnetism. 4. Kursid (suunanurkade tüübid). 5. Navigatsiooniline kiiruste kolmnurk Min
VFR navigatsioon I (Mõisted ja elemendid I) 1. Suunad ja nende tähistamine. 2. Maakera ja sellega seonduv. 3. Maa magnetism. 4. Kursid (suunanurkade tüübid). 5. Navigatsiooniline kiiruste kolmnurk Min
1 Reaalarvud ja kompleksarvud Reaalarvud Kompleksarvud Kompleksarvu algebraline kuju... 5
 1. Marek Kolk, Kõrgem matemaatika, Tartu Ülikool, 2013-14. 1 Reaalarvud ja kompleksarvud Sisukord 1 Reaalarvud ja kompleksarvud 1 1.1 Reaalarvud................................... 2 1.2 Kompleksarvud.................................
1. Marek Kolk, Kõrgem matemaatika, Tartu Ülikool, 2013-14. 1 Reaalarvud ja kompleksarvud Sisukord 1 Reaalarvud ja kompleksarvud 1 1.1 Reaalarvud................................... 2 1.2 Kompleksarvud.................................
Andmeanalüüs molekulaarbioloogias
 Andmeanalüüs molekulaarbioloogias Praktikum 3 Kahe grupi keskväärtuste võrdlemine Studenti t-test 1 Hüpoteeside testimise peamised etapid 1. Püstitame ENNE UURINGU ALGUST uurimishüpoteesi ja nullhüpoteesi.
Andmeanalüüs molekulaarbioloogias Praktikum 3 Kahe grupi keskväärtuste võrdlemine Studenti t-test 1 Hüpoteeside testimise peamised etapid 1. Püstitame ENNE UURINGU ALGUST uurimishüpoteesi ja nullhüpoteesi.
TARTU ÜLIKOOL Teaduskool. STAATIKA TASAKAALUSTAMISTINGIMUSED Koostanud J. Lellep, L. Roots
 TARTU ÜLIKOOL Teaduskool STAATIKA TASAKAALUSTAMISTINGIMUSED Koostanud J. Lellep, L. Roots Tartu 2008 Eessõna Käesoleva õppevahendi kasutajana on mõeldud eelkõige täppisteaduste vastu huvi tundvaid gümnaasiumi
TARTU ÜLIKOOL Teaduskool STAATIKA TASAKAALUSTAMISTINGIMUSED Koostanud J. Lellep, L. Roots Tartu 2008 Eessõna Käesoleva õppevahendi kasutajana on mõeldud eelkõige täppisteaduste vastu huvi tundvaid gümnaasiumi
Eesti LIV matemaatikaolümpiaad
 Eesti LIV matemaatikaolümpiaad 31. märts 007 Lõppvoor 9. klass Lahendused 1. Vastus: 43. Ilmselt ei saa see arv sisaldada numbrit 0. Iga vähemalt kahekohaline nõutud omadusega arv sisaldab paarisnumbrit
Eesti LIV matemaatikaolümpiaad 31. märts 007 Lõppvoor 9. klass Lahendused 1. Vastus: 43. Ilmselt ei saa see arv sisaldada numbrit 0. Iga vähemalt kahekohaline nõutud omadusega arv sisaldab paarisnumbrit
KATEGOORIATEOORIA. Kevad 2016
 KTEGOORITEOORI Kevad 2016 Loengukonspekt Lektor: Valdis Laan 1 1. Kategooriad 1.1. Hulgateoreetilistest alustest On hästi teada, et kõigi hulkade hulka ei ole olemas. Samas kategooriateoorias sooviks me
KTEGOORITEOORI Kevad 2016 Loengukonspekt Lektor: Valdis Laan 1 1. Kategooriad 1.1. Hulgateoreetilistest alustest On hästi teada, et kõigi hulkade hulka ei ole olemas. Samas kategooriateoorias sooviks me
TARTU ÜLIKOOL Teaduskool. V. Väinaste. Kehade pöördliikumine
 TARTU ÜLIKOOL Teaduskool V. Väinaste Kehade pöördliikumine TARTU 009 1 Kehade pöördliikumine Mehaanikas eristatakse kehade liikumise kahte põhiliiki: a) kulgliikumine b) pöördliikumine Kulgliikumise korral
TARTU ÜLIKOOL Teaduskool V. Väinaste Kehade pöördliikumine TARTU 009 1 Kehade pöördliikumine Mehaanikas eristatakse kehade liikumise kahte põhiliiki: a) kulgliikumine b) pöördliikumine Kulgliikumise korral
7 SIGNAALI SPEKTRI ANALÜÜS
 1 7 SIGNAALI SPEKTRI ANALÜÜS 7.1 Üldist Perioodiliselt orduva signaali speter on tema Fourier' rida. Fourier' rea abil on signaal esitatav tema alalisomponendi ja harmooniliste summana s A o ( t) + A cos(
1 7 SIGNAALI SPEKTRI ANALÜÜS 7.1 Üldist Perioodiliselt orduva signaali speter on tema Fourier' rida. Fourier' rea abil on signaal esitatav tema alalisomponendi ja harmooniliste summana s A o ( t) + A cos(
Keemia lahtise võistluse ülesannete lahendused Noorem rühm (9. ja 10. klass) 16. november a.
 16. november a.") Keemia lahtise võistluse ülesannete lahendused oorem rühm (9. ja 0. klass) 6. november 2002. a.. ) 2a + 2 = a 2 2 2) 2a + a 2 2 = 2a 2 ) 2a + I 2 = 2aI 4) 2aI + Cl 2 = 2aCl + I 2 5) 2aCl = 2a + Cl 2 (sulatatud
Keemia lahtise võistluse ülesannete lahendused oorem rühm (9. ja 0. klass) 6. november 2002. a.. ) 2a + 2 = a 2 2 2) 2a + a 2 2 = 2a 2 ) 2a + I 2 = 2aI 4) 2aI + Cl 2 = 2aCl + I 2 5) 2aCl = 2a + Cl 2 (sulatatud
ISC0100 KÜBERELEKTROONIKA
 ISC0100 KÜBERELEKTROONIKA Kevad 2018 Neljas loeng Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin Teemad
ISC0100 KÜBERELEKTROONIKA Kevad 2018 Neljas loeng Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin Teemad
Deformeeruva keskkonna dünaamika
 Peatükk 4 Deformeeruva keskkonna dünaamika 1 Dünaamika on mehaanika osa, mis uurib materiaalsete keskkondade liikumist välismõjude (välisjõudude) toimel. Uuritavaks materiaalseks keskkonnaks võib olla
Peatükk 4 Deformeeruva keskkonna dünaamika 1 Dünaamika on mehaanika osa, mis uurib materiaalsete keskkondade liikumist välismõjude (välisjõudude) toimel. Uuritavaks materiaalseks keskkonnaks võib olla
5. TUGEVUSARVUTUSED PAINDELE
 TTÜ EHHTROONKNSTTUUT HE00 - SNTEHNK.5P/ETS 5 - -0-- E, S 5. TUGEVUSRVUTUSE PNELE Staatika üesandes (Toereaktsioonide eidmine) vaadatud näidete ause koostada taade sisejõuepüürid (põikjõud ja paindemoment)
TTÜ EHHTROONKNSTTUUT HE00 - SNTEHNK.5P/ETS 5 - -0-- E, S 5. TUGEVUSRVUTUSE PNELE Staatika üesandes (Toereaktsioonide eidmine) vaadatud näidete ause koostada taade sisejõuepüürid (põikjõud ja paindemoment)
4. KEHADE VASTASTIKMÕJUD. JÕUD
 4. KEHADE VASTASTIKMÕJUD. JÕUD Arvatavasti oled sa oma elus kogenud, et kõik mõjud on vastastikused. Teiste sõnadega: igale mõjule on olemas vastumõju. Ega füüsikaski teisiti ole. Füüsikas on kehade vastastikuse
4. KEHADE VASTASTIKMÕJUD. JÕUD Arvatavasti oled sa oma elus kogenud, et kõik mõjud on vastastikused. Teiste sõnadega: igale mõjule on olemas vastumõju. Ega füüsikaski teisiti ole. Füüsikas on kehade vastastikuse