ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ
|
|
|
- Διδώ Κουντουριώτης
- 6 χρόνια πριν
- Προβολές:
Transcript

1 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΜΕ ΕΦΑΡΜΟΓΕΣ ΣΤΗ ΒΙΟΙΑΤΡΙΚΗ Πλοήγηση ρομπότ με χρήση της φορητής κάμερας Στυλιανός Μουρατίδης ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Υπεύθυνος Δελήμπασης Κωνσταντίνος, Επίκουρος Καθηγητής Πλαγιανάκος Βασίλειος, Αναπληρωτής Καθηγητής Λαμία, 2016
2 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΜΕ ΕΦΑΡΜΟΓΕΣ ΣΤΗ ΒΙΟΙΑΤΡΙΚΗ Πλοήγηση ρομπότ με χρήση της φορητής κάμερας Στυλιανός Μουρατίδης ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Επιβλέπων/σα Δελήμπασης Κωνσταντίνος, Επίκουρος Καθηγητής Πλαγιανάκος Βασίλειος, Αναπληρωτής Καθηγητής Λαμία, 2016
3 Με ατομική μου ευθύνη και γνωρίζοντας τις κυρώσεις (1), που προβλέπονται από της διατάξεις της παρ. 6 του άρθρου 22 του Ν. 1599/1986, δηλώνω ότι: 1. Δεν παραθέτω κομμάτια βιβλίων ή άρθρων ή εργασιών άλλων αυτολεξεί χωρίς να τα περικλείω σε εισαγωγικά και χωρίς να αναφέρω το συγγραφέα, τη χρονολογία, τη σελίδα. Η αυτολεξεί παράθεση χωρίς εισαγωγικά χωρίς αναφορά στην πηγή, είναι λογοκλοπή. Πέραν της αυτολεξεί παράθεσης, λογοκλοπή θεωρείται και η παράφραση εδαφίων από έργα άλλων, συμπεριλαμβανομένων και έργων συμφοιτητών μου, καθώς και η παράθεση στοιχείων που άλλοι συνέλεξαν ή επεξεργάσθηκαν, χωρίς αναφορά στην πηγή. Αναφέρω πάντοτε με πληρότητα την πηγή κάτω από τον πίνακα ή σχέδιο, όπως στα παραθέματα. 2. Δέχομαι ότι η αυτολεξεί παράθεση χωρίς εισαγωγικά, ακόμα κι αν συνοδεύεται από αναφορά στην πηγή σε κάποιο άλλο σημείο του κειμένου ή στο τέλος του, είναι αντιγραφή. Η αναφορά στην πηγή στο τέλος π.χ. μιας παραγράφου ή μιας σελίδας, δεν δικαιολογεί συρραφή εδαφίων έργου άλλου συγγραφέα, έστω και παραφρασμένων, και παρουσίασή τους ως δική μου εργασία. 3. Δέχομαι ότι υπάρχει επίσης περιορισμός στο μέγεθος και στη συχνότητα των παραθεμάτων που μπορώ να εντάξω στην εργασία μου εντός εισαγωγικών. Κάθε μεγάλο παράθεμα (π.χ. σε πίνακα ή πλαίσιο, κλπ), προϋποθέτει ειδικές ρυθμίσεις, και όταν δημοσιεύεται προϋποθέτει την άδεια του συγγραφέα ή του εκδότη. Το ίδιο και οι πίνακες και τα σχέδια 4. Δέχομαι όλες τις συνέπειες σε περίπτωση λογοκλοπής ή αντιγραφής. Ημερομηνία: /.. /20 Ο Η Δηλ. (Υπογραφή) (1) «Όποιος εν γνώσει του δηλώνει ψευδή γεγονότα ή αρνείται ή αποκρύπτει τα αληθινά με έγγραφη υπεύθυνη δήλωση του άρθρου 8 παρ. 4 Ν. 1599/1986 τιμωρείται με φυλάκιση τουλάχιστον τριών μηνών. Εάν ο υπαίτιος αυτών των πράξεων σκόπευε να προσπορίσει στον εαυτόν του ή σε άλλον περιουσιακό όφελος βλάπτοντας τρίτον ή σκόπευε να βλάψει άλλον, τιμωρείται με κάθειρξη μέχρι 10 ετών.
4 Πλοήγηση ρομπότ με χρήση της φορητής κάμερας Στυλιανός Μουρατίδης Τριμελής Επιτροπή: Δελήμπασης Κωνσταντίνος, Επίκουρος Καθηγητής Πλαγιανάκος Βασίλειος, Αναπληρωτής Καθηγητής Ιακωβίδης Δημήτριος, Αναπληρωτής Καθηγητής
5 1. Εισαγωγή 1.1. Βασικές αρχές πλοήγησης ρομπότ Στον τομέα της υπολογιστικής ρομποτικής, η ικανότητα της αυτόματης πλοήγησης ρομπότ έχει γίνει σχεδόν αναγκαία λόγω του μεγάλου εύρους εφαρμογών της ρομποτικής. Η αυτόματη αναγνώριση αντικειμένων, σχημάτων και η δυνατότητα χαρτογράφησης ενός χώρου με τη χρήση ρομπότ είναι εφικτά και αποτελούν προβλήματα τα οποία λύνονται. Συνήθως, για την αυτόματη πλοήγηση ρομπότ, είναι απαραίτητο να γνωρίζουμε κάποια χαρακτηριστικά του χώρου, όπως το βάθος, οι αποστάσεις μεταξύ των σημείων και την κίνηση της κάμερας. Υπάρχουν πολλοί υλοποιημένοι μέθοδοι για την πλοήγηση ρομπότ. Σε κάποιες περιπτώσεις, για πλοήγηση ρομπότ σε εσωτερικούς χώρους, χρησιμοποιείται ρομπότ που είναι εξοπλισμένο με αισθητήρες μέτρησης απόστασης [9]. Σε αυτές τις περιπτώσεις, οι αισθητήρες λαμβάνουν πληροφορίες για την απόσταση κάποιων εμποδίων στο χώρο, τα οποία χαρτογραφούνται και με αυτό τον τρόπο αποφεύγονται [10][11]. Η χρήση του Kinect και άλλων αισθητήρων βάθους εμφανίζεται σε πολλές μεθόδους. Το Kinect, μας δίνει τη δυνατότητα να έχουμε μετρήσεις για την απόσταση της σκηνής από τον αισθητήρα, αλλά και εικόνα. Αυτό είναι ιδιαιτέρως χρήσιμο για μεθόδους χαρτογράφησης και πλοήγησης σε εσωτερικούς χώρους [15][16][17]. Υπάρχουν μέθοδοι που χρησιμοποιούν τεχνολογία αποθήκευσης και ανάκτησης δεδομένων από απόσταση με τη χρήση ενός πομπού/δέκτη (reader) και ετικετών (tags). Η τεχνολογία αυτή ονομάζεται RFID και είναι ουσιαστικά ένα σύστημα που αποτελείται από πολλές ετικέτες διαμοιρασμένες στο χώρο [19][20]. Αυτές οι ετικέτες είναι κυκλώματα με μια κεραία με δυνατότητα ανταλλαγής μηνυμάτων με άλλες ετικέτες ή το κύκλωμα πομπού/δέκτη. Με αυτό τον τρόπο, ένα ρομπότ που έχει εγκατεστημένο ένα κύκλωμα πομπού/δέκτη, μπορεί να παίρνει πληροφορίες από μια ετικέτα, ώστε να γνωρίζει σε ποιο σημείο του χώρου βρίσκεται και να διαμοιράζει αυτή τη πληροφορία μέσω του πομπού σε ένα σύστημα που χαρτογραφεί τη πορεία του ρομπότ [18]. Μια παρόμοια μέθοδος πλοήγησης ρομπότ, χρησιμοποιεί σήμα Wi-Fi [23]. Στη συγκεκριμένη μέθοδο, ένας αλγόριθμος υπολογίζει τη θέση που βρίσκεται το ρομπότ με βάση το χρόνο που χρειάστηκε ένα σήμα να φτάσει σε αυτό [21][23]. Αυτή η μέθοδος μπορεί να εφαρμοστεί μόνο σε εσωτερικούς χώρους [22]. Άλλες μέθοδοι στηρίζονται στη χρήση 2 καμερών (stereo vision). Οι μέθοδοι αυτοί χρησιμοποιούνται συνήθως σε εφαρμογές που λαμβάνουν χώρα σε εξωτερικό περιβάλλον [12][13]. Με τη χρήση 2 καμερών, υπολογίζεται το βάθος του πλάνου που είναι προσανατολισμένες οι κάμερες και οι μετρήσεις έχουν μεγάλη ακρίβεια [14]. Υπάρχουν όμως και μέθοδοι για πλοήγηση και εντοπισμό θέσης του ρομπότ με τη χρήση μιας κάμερας. Υπάρχουν διάφορες αλγοριθμικές προσεγγίσεις στη μέθοδο. Για παράδειγμα, μπορούμε να ανακατασκευάσουμε ένα μοντέλο του χώρου στο οποίο βρίσκεται η κάμερα μέσω της κίνησης που κάνει (Structure from Motion) [24] [26].
6 Άλλες μέθοδοι χρησιμοποιούν μια ευρυγώνια κάμερα σε στατική θέση, για υπολογισμό θέσης ενός ρομπότ [25]. Όπως επίσης άλλες μέθοδοι χρησιμοποιούν εικόνες με μοτίβα τα οποία αναγνωρίζονται από τη κάμερα [28]. Ανάλογα με το μοτίβο που αναγνωρίζεται, μπορούμε να γνωρίζουμε και τη θέση του ρομπότ [27] [28] [29]. Χρησιμοποιώντας δύο κάμερες που γνωρίζουμε την μεταξύ τους απόσταση ή με χρήση αισθητήρα βάθους, μπορούμε να αναπαραστήσουμε τον τρισδιάστατο χώρο όπου είναι προσανατολισμένο το σύστημά μας. Η χρήση όμως πολλαπλών καμερών ή η χρήση αισθητήρα μπορεί να αυξήσουν το κόστος ή τη δυνατότητα χρησιμοποίησης οποιασδήποτε κάμερας για αυτόματη πλοήγηση ενός ρομπότ. Σκοπός της παρούσας πτυχιακής εργασίας είναι η θεωρητική μελέτη και η υλοποίηση ενός αλγορίθμου που υπολογίζει τη θέση και τον προσανατολισμό μίας φορητής κάμερας. Στη μέθοδό μας χρησιμοποιούμε μια άγνωστη φορητή κάμερα, την οποία αρχικά τη βαθμονομούμε και στη συνέχεια, μέσα από κάποια γνωστά σημεία στο χώρο, μπορούμε να υπολογίσουμε τη θέση και τον προσανατολισμό της με τη χρήσης μιας μόνο εικόνας. Με αυτό τον τρόπο μπορούμε να χρησιμοποιήσουμε οποιαδήποτε κάμερα για να λειτουργήσει το σύστημα μας και να μπορέσουμε να γνωρίζουμε τη θέση της στο χώρο, για κάθε εικόνα που αποκτάμε από αυτή. Έτσι μπορούμε να υπολογίσουμε τη διαδρομή που ακολούθησε η κάμερα στο χώρο κατά τη πλοήγησή της. Αναγκαίο βήμα για να πετύχουμε όλα τα παραπάνω είναι μια διαδικασία που ονομάζεται βαθμονόμηση κάμερας μέσω της οποίας υπολογίζουμε τις εσωτερικές και εξωτερικές παραμέτρους της Αναγκαιότητα βαθμονόμησης κάμερας Η βαθμονόμηση της κάμερας είναι μια διαδικασία μέσω της οποίας υπολογίζουμε τις εσωτερικές παραμέτρους της κάμερας, όπως το εύρος πεδίου, η εστιακή απόσταση, η κυρτότητα του φακού και αντιστοίχιση κάθε σημείου μιας εικόνας με το αντίστοιχο σημείο του αισθητήρα. Στη μέθοδό μας ακολουθούμε το μοντέλο βαθμονόμησης του Roger Y. Tsai [2], ο οποίος περιγράφει τη βαθμονόμηση μιας κάμερας μέσω γνωστών μη-συνεπίπεδων σημείων στο χώρο. Τις περισσότερες φορές, κάποιες από τις παραπάνω πληροφορίες παρέχονται από τον κατασκευαστή. Σε όσες κάμερες δεν γνωρίζουμε τις εσωτερικές παραμέτρους όμως, πρέπει να ακολουθήσουμε τη διαδικασίας βαθμονόμησης της κάμερας ώστε να μπορέσουμε αργότερα να υπολογίσουμε τις εξωτερικές παραμέτρους της [2][3][4]. Έχοντας υπολογίσει τις εσωτερικές παραμέτρους της κάμερας, πλέον μπορούμε να τις χρησιμοποιήσουμε για να υπολογίσουμε τις εξωτερικές παραμέτρους, οι οποίες είναι η θέση της κάμερας αλλά και ο προσανατολισμός της στο χώρο. Λόγω της πολυπλοκότητας του υπολογισμού του προσανατολισμού της κάμερας στο χώρο, όπως αναλύεται στο κεφάλαιο 2, συνήθως πρέπει να γνωρίζουμε και κάποιες περαιτέρω πληροφορίες για τον χώρο στο οποίο βρίσκεται η κάμερα. Για παράδειγμα, αν γνωρίζουμε μια θέση στο χώρο και γνωρίζουμε και το προσανατολισμό της κάμερας στο χώρο, με μια αλλαγή προσήμου στο πίνακα περιστροφής κατά κάποιο άξονα, θα έχουμε το ακριβώς αντισυμμετρικό σημείο στο χώρο. Συνήθως, αυτό είναι κάτι που, όπως και στη περίπτωση μας, δεν είναι ούτε ιδεατό, ούτε σωστό αλλά και ούτε πιθανό, όπως θα αναλύσουμε στο κεφάλαιο 3.
7 1.3. Χρησιμότητα της μεθόδου της παρούσας πτυχιακής Με τη μέθοδο που περιγράφεται στην παρούσα πτυχιακή, υλοποιήσαμε την βαθμονόμηση μιας άγνωστης κάμερας, γνωρίζοντας την θέση ενός αριθμού γνωστών σημείων του χώρου. Στη συνέχεια χρησιμοποιούμε την βαθμονόμηση για να υπολογίζουμε τη θέση και προσανατολισμό της κάμερας στο χώρο, έχοντας μία εικόνα του χώρου που περιέχει τα γνωστά σημεία. Επομένως είναι δυνατό να πλοηγήσουμε ένα ρομπότ με δεδομένα που δεχόμαστε μέσω μιας οποιασδήποτε κάμερας που μπορεί να είναι προσαρμοσμένη πάνω σε ένα ρομπότ. Στο κεφάλαιο των αποτελεσμάτων παρουσιάζεται η ανάκτηση των θέσεων και του προσανατολισμού κατά μήκος μίας τροχειάς της κάμερας στο χώρο του πανεπιστημίου.
8 2. Μεθοδολογία Βαθμονόμηση Κάμερας (Camera Calibration) 2.1. Μαθηματικό Μοντέλο Κάμερας Για να κατανοήσουμε καλύτερα τη διαδικασία της βαθμονόμησης της κάμερας, πρέπει να αναλύσουμε το μαθηματικό μοντέλο σχηματισμού εικόνας από την κάμερα. Ουσιαστικά αυτό περιγράφει την προβολή ενός αντικειμένου από το τρισδιάστατου συστήματος του κόσμου, στον αισθητήρα της κάμερας (Σχ.1). Έστω P w xw, yw, zw η θέση του αντικειμένου στο σύστημα συντεταγμένων της κάμερας και (u,v) το σημείο προβολής του αντικειμένου στον αισθητήρα της κάμερας. Με f συμβολίζουμε την εστιακή απόσταση, δηλ. την απόσταση του σημείου προβολής Ο από το κέντρο συντεταγμένων της κάμερας Σχήμα 1. Γραφική αναπαράσταση του μαθηματικού μοντέλου της κάμερας (προσαρμοσμένο από [1]). Στο Σχήμα 1 φαίνεται μια κάμερα με κέντρο προβολής το σημείο Ο. Η εστιακή απόσταση f είναι η απόσταση του φακού από τον αισθητήρα της κάμερας. Στο μοντέλο της κάμερας, το f ως προς τον άξονα x και ως προς το y είναι το ίδιο. Αυτό όμως δε συμβαίνει και σε όλες τις κάμερες. Σε ότι αφορά το f στον άξονα z, αυτό εξαρτάται από το ζουμ της κάμερας. Στο δικό μας μοντέλο, η απόσταση μεταξύ φακού και αισθητήρα δεν αλλάξει, επομένως η εστιακή απόσταση παραμένει σταθερή, όπως φαίνεται και στο Σχήμα 2.
9 v Y cam X cam u Z cam z w y w X w Σχήμα 2 Σχηματική αναπαράσταση των συστημάτων συντεταγμένων που χρησιμοποιούνται για τη βαθμονόμηση της κάμερας. Ένα σημείο P w xw, yw, zw του τρισδιάστατου χώρου προβάλλεται στο σημείο (u,v) επί του αισθητήρα της κάμερας. Η θέση της προβολής εξαρτάται από τις εξωτερικές παραμέτρους της κάμερας (θέση και προσανατολισμό της στο σύστημα συντεταγμένων του χώρου). Κάθε σημείο του 3D χώρου αντιστοιχίζεται με ένα pixel της εικόνας με αντίστοιχη θέση (u,v). Αν P x, y, z οι συντεταγμένες του cam cam cam cam P w στο σύστημα συντεταγμένων της κάμερας, τότε χρησιμοποιώντας τη θεωρία του προβολικού μετασχηματισμού, μπορούμε να καταλήξουμε στις εξής σχέσεις που περιγράφουν το μοντέλο που συνδέουν το P cam με το uv, : (1) από όπου μπορούμε να έχουμε: όπως επίσης: (2)
10 (3) To pixel (i,j) στο οποίο απεικονίζεται το σημείο P cam υπολογίζεται αν θεωρήσουμε ένα πίνακα Κ, που περιγράφει τις εσωτερικές παραμέτρους της κάμερας ως εξής: ax s u0 K 0 ay v (4) Τότε το (i,j) υπολογίζεται ως εξής: j ax s u0 u i 0 ay v 0 v (5) Συνήθως s=0, έτσι η (4) γίνεται ax 0 u0 K 0 ay v (6) Αν θεωρήσουμε ότι η κάμερα βρίσκεται στη θέση Tx, Ty, Tz στο σύστημα συντεταγμένων του χώρου, τότε ορίζεται το διάνυσμα μεταφοράς T, ως εξής: (7) Ας θεωρήσουμε επίσης ένα 4x4 ορθοκανονικό πίνακα περιστροφής R, ο οποίος καθορίζει τον προσανατολισμό της κάμερας στο σύστημα συντεταγμένων του χώρου r11 r12 r13 0 r21 r22 r23 0 R r31 r32 r (8) Τότε, το P w και το P cam συνδέονται ως εξής: xcam xw Tx ycam yw Ty R z cam z w T z (9)
11 Αν αντικαταστήσουμε το διάνυσμα μεταφοράς με πίνακα και τον συνδυάσουμε με τοn R, η (9) μπορεί να γραφτεί σε ομογενείς συντεταμένες, ως εξής: xcam r11 r12 r13 Tx xw ycam r21 r22 r23 Ty yw z cam r31 r32 r33 T z z w (10) Ο πίνακας περιστροφής R μπορεί να αναλυθεί μέσω των περιστροφών Euler: R Rx Ry Rz όπου R, R, R οι πίνακες περιστροφής γύρω από τους άξονες X, Y, Z αντίστοιχα, κατά x y z γωνία x z [2], [3] y R x R y cos( x) sin( x) 0 0 sin( x) cos( x) (11) (12) cos( y) sin( y) 0 0 sin( y) cos( y) (13) R z cos( z) sin( z) 0 0 sin( z) cos( z) (14) Εκτός από γωνίες Euler, έχουν προταθεί και άλλοι τρόποι ανάλυσης του πίνακα περιστροφής, αλλά δε θα μας απασχολήσουν στην παρούσα πτυχιακή Βαθμονόμηση Κάμερας Η βαθμονόμηση της κάμερας είναι μια διαδικασία με την οποία προσδιορίζουμε: τις εσωτερικές παραμέτρους της κάμερας (το f και τα στοιχεία του πίνακα K) και τις εξωτερικές παραμέτρους της κάμερας: την θέση της και τον προσανατολισμό της στο χώρο, ισοδύναμα τα στοιχεία των πινάκων R,T.
12 Η βαθμονόμηση μπορεί να επιτευχθεί γνωρίζοντας τις συντεταγμένες ενός ελάχιστου πλήθους σημείων στο χώρο καθώς και τα pixel της εικόνας στα οποία εμφανίζονται τα σημεία αυτά. Πιο συγκεκριμένα: Συνδυάζοντας τις σχέσεις (2), (3), (10) μπορούμε να ορίσουμε τις εξής δύο εξισώσεις για κάθε σημείο P w και την προβολή του (u,v) στο επίπεδο του αισθητήρα της κάμερας [2],[4], για k:1,2,,n ο αριθμός των γνωστών σημείων: r X r Y r Z T 11 w, k 12 w, k 13 w, k x uk f r 31 X w, k r 32 Y w, k r 33 Z w, k T z r X r Y r Z T 21 w, k 22 w, k 23 w, k y vk f r 31 X w, k r 32 Y w, k r 33 Z w, k T z (15) (16) Από τις παραπάνω σχέσεις, διαιρώντας κατά μέλη καταλήγουμε: (17) Από όπου, μετά από αλγεβρικές πράξεις, έχουμε: (18) Δεδομένου επαρκούς πλήθους σημείων με γνωστά P w και (u,v), η (18) αποτελεί γραμμικό σύστημα εξισώσεων με τους εξής 8 αγνώστους [4]: Έτσι η (18) μπορεί να ξαναγραφεί σε μορφή πινάκων, ως εξής:
13 r11 r 12 v1 xw v yw v1z w v1 u xw u yw u zw u1 r v2xw v 2 2 yw v 2 2zw v 2 2 u2xw u 2 2 yw u 2 2zw u 2 2 xcam H x 0 r 21 vk xw vk yw vk z r w vk uk xw uk yw uk zw u k 22 k k k k k k r y 23 cam (19) Το σύστημα γραμμικών εξισώσεων (19) είναι ομογενές. Ένα ομογενές σύστημα εξισώσεων έχει τουλάχιστον τη τετριμμένη μηδενική λύση. Αν Ν>8 τότε η (19) αποτελεί ένα ομογενές υπερ-ορισμένο σύστημα. Αν θεωρήσουμε τον πίνακα (20) τότε λύση του συστήματος αποτελεί το ιδιοδιάνυσμα που αντιστοιχεί στη μηδενική ιδιοτιμή του M, μέσω της διαδικασίας Singular Value Decomposition -SVD [1],[2]. Η SDV αναλύει ένα πίνακα σε 3 πίνακες: ένα τετραγωνικό πίνακα, ένα διαγώνιο πίνακα και τον ανάστροφο ενός πίνακα. Το θεώρημα παρουσιάζεται ως εξής: (21) όπου ισχύει ότι, οι στήλες του U είναι ορθοκανονικά ιδιοδιανύσματα του, οι στήλες του V είναι ορθοκανονικά ιδιοδιανύσματα του και ο S είναι ο διαγώνιος πίνακας που περιλαμβάνει της τετραγωνικές ρίζες των ιδιοτιμών των U ή V σε φθίνουσα σειρά [6]. Αν θεωρήσουμε H ένα πίνακα μεγέθους [m x n] και το ένα διάνυσμα μεγέθους [n x 1], τότε το ομογενές σύστημα έχει μια μη-προφανή και μοναδική λύση [5]. Έτσι, αν οι u,v είναι συντεταγμένες των σημείων του τρισδιάστατου χώρου στην εικόνα, έχουμε μοναδική λύση για τους 8 αγνώστους. Στη περίπτωσή μας, λύση του ομογενούς συστήματος είναι το ιδιοδιάνυσμα που αντιστοιχεί στη ελάχιστη ιδιοτιμή του πίνακα M [2][4]. Η λύση αυτή ταυτίζεται με το πρώτο διάνυσμα του Πίνακα Vn n της Εξ. (21).Επομένως με τη λύση του ομογενούς συστήματος γνωρίζουμε πλέον τις τιμές των δύο πρώτων γραμμών του πίνακα περιστροφής R (δηλαδή τους αγνώστους, ) και τη θέση της κάμερας στον άξονα x και στον άξονα y T, T. Τα αποτελέσματα του πίνακα περιστροφής πρέπει να πολλαπλασιαστούν x y με ένα σταθερό όρο, που είναι η κλίμακα s του μετασχηματισμού. Αυτό συμβαίνει διότι σε ένα ομογενές σύστημα, οποιοδήποτε πολλαπλάσιο της μη μηδενικής λύσης αποτελεί επίσης λύση του συστήματος. Η κλίμακα προσδιορίζεται από την απαίτηση για ορθοκανονικότητα κάθε μίας από τις 2 πρώτες γραμμές:
14 (22) από όπου προκύπτει: (23) Το s μπορεί να υπολογιστεί ισοδύναμα και από την απαίτηση η 2 η γραμμή του R να έχει μέτρο 1: Έτσι θέτουμε της σωστή κλίμακα στις τιμές των 8 αγνώστων: (24) r sr, i 1,2, j 1,2,3 ij T T x y ij st x st y (25) Για να ανακτήσουμε τη τρίτη γραμμή του πίνακα περιστροφής ( ), χρησιμοποιούμε το θεώρημα κατά το οποίο οι γραμμές του R πρέπει να είναι ορθοκανονικές. Επομένως κάνοντας εξωτερικό γινόμενο τη πρώτη με τη δεύτερη γραμμή του πίνακα περιστροφής, ανακτούμε τη τρίτη γραμμή ( ) [4]. r, r, r r, r, r r, r, r Πλέον, με όλους τους αγνώστους να έχουν υπολογιστεί, για να βρούμε το και την εστιακή απόσταση f, χρησιμοποιώντας τις σχέσεις (15) και (16), λύνουμε πλέον, το (μη-ομογενές) σύστημα με διάνυσμα αγνώστων το f και το T z [4]. z r11 X w, N r12 Yw, N r13 Zw, N T r x u N 31 X w, N r32 Yw, N r33 Zw, N (25) r11 X w,1 r12 Yw,1 r13 Zw,1 Tx u 1 r31 X w,1 r32 Yw,1 r33 Zw,1 r11 X w,2 r r 12 Yw,2 r13 Zw,2 Tx u2 f 31 X w,2 r32 Yw,2 r33 Z w,2 T (26) H (26) είναι ένα υπερκαθορισμένο γραμμικό σύστημα που αν ξαναγραφεί ως: f A B T, επιλύεται ως εξής: z f T z T 1 T A A A A B (26α) Όπως αναφέραμε και προηγουμένως, οι εσωτερικές παράμετροι μιας κάμερας είναι τα στοιχεία του πίνακα Κ και η εστιακή απόσταση f, ισοδύναμα δε, μπορούν να προκύψουν από το f και το (φυσικό) μέγεθος του αισθητήρα. Συνήθως, η εστιακή
15 απόσταση και το μέγεθος του αισθητήρα δίνονται από τον κατασκευαστή. Εμείς δεν είχαμε αυτές τις πληροφορίες για την κάμερα που χρησιμοποιήσαμε, γνωρίζαμε μόνο ότι την αναλογία των pixel που είναι 640 (στήλες) x480 (γραμμές). Επομένως, διεξήγαμε ένα πείραμα με γνωστές τις θέσεις των σημείων στο χώρο και τα αντίστοιχα pixel στην εικόνα. Επίσης γνωρίζαμε, την θέση της κάμερας και τον προσανατολισμό της. Έτσι υπολογίζουμε τις συντεταγμένες P cam για κάθε ένα από τα γνωστά σημεία στο σύστημα αξόνων της κάμερας, χρησιμοποιώντας την (10). Στη συνέχεια υπολογίζουμε τις συντεταγμένες της προβολής των σημείων πάνω στον αισθητήρα (u,v) μέσω των σχέσεων (2) και (3). Τα στοιχεία του πίνακα Κ μπορούν να υπολογιστούν επιλύοντας τα εξής 2 υπερ-ορισμένα (μη-ομογενή) συστήματα γραμμικών εξισώσεων για k=1,2,..,n: j a j u (27) k x gt, k k i a i v (28) k y gt, k k όπου ik, j k είναι οι συντεταγμένες των σημείων στα pixel της κάμερας, uk, v k είναι τα αντίστοιχα σημεία στον αισθητήρα της κάμερας όπως υπολογίσαμε πριν (27), (28). Οι (27), (28) μπορούν να γραφούν σε μορφή πινάκων u1 1 jgt, N x b u 1 j x N gt, N (29) v1 1 igt,1 ay b v 1 i x N gt, N (30)

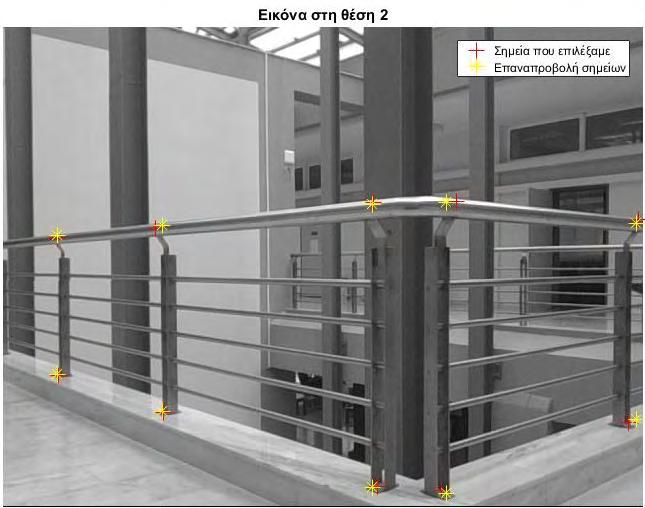
16 3. Αποτελέσματα Για να διαπιστώσουμε τον τρόπο λειτουργίας της μεθόδου, διεξήγαμε μια σειρά από πειράματα που χωρίζονται σε δύο τμήματα. Πρώτα απαιτείται να υπολογίσουμε τις εσωτερικές παραμέτρους της κάμερας και στη συνέχεια τις εξωτερικές παραμέτρους. Αρχικά καθορίσαμε το σύστημα αναφοράς του πραγματικού χώρου X w, Yw, Z w, με άξονες όπως φαίνεται στο Σχήμα 3. Επιλέξαμε 10 μη συνεπίπεδα σημεία στο χώρο, των οποίων μετρήσαμε τις συντεταγμένες στο σύστημα αναφοράς X w, Yw, Z w, τα οποία φαίνονται με κόκκινο σταυρό και αριθμημένα στο Σχήμα 3. Για διάφορες θέσεις και προσανατολισμούς της κάμερας, λαμβάνεται μία εικόνα που περιέχει τα 10 σημεία με τις γνωστές συντεταγμένες. Οι λήψεις αυτές χρησιμοποιούνται είτε για καθορισμό των εσωτερικών παραμέτρων της κάμερας, αν η θέση είναι γνωστή, είτε για καθορισμό της άγνωστης θέσης και του προσανατολισμού της. Z w Y w 1 4 X w Σχήμα 3.Το σύστημα αναφορά του χώρου που επιλέχθηκε και τα γνωστά σημεία που χρησιμοποιήσαμε. Μοναδική προϋπόθεση για να μπορούμε να πάρουμε μια λήψη και να υπολογίσουμε τη θέση και προσανατολισμό της κάμερας, είναι να υπάρχουν όλα τα σημεία που έχουμε επιλέξει στη λήψη. Πήραμε δέκα σημεία στο χώρο και μετρήσαμε τις
17 συντεταγμένες τους. Όπως αναφέρθηκε στο κεφ.2, είναι απαραίτητο τα σημεία στο χώρο μας να είναι περισσότερα από οχτώ. Συγκεκριμένα οι θέσεις των σημείων που χρησιμοποιήσαμε είναι: Πίνακας 1. Συντεταγμένες των σημείων του χώρου που επιλέχθηκαν, στο σύστημα αναφοράς του Σχήμα. 3. Σημείο Χ (cm) Y (cm) Z (cm) Σχήμα 4 Γραφική αναπαράσταση της διάταξης των πειραμάτων.
18 Εφόσον δημιουργήσαμε ένα σύστημα συντεταγμένων όπου μπορούμε να μετρήσουμε την απόσταση κάθε σημείου από το μηδέν, τοποθετήσαμε την κάμερα σε θέσεις που γνωρίζαμε τις συντεταγμένες για να διεξάγουμε πειράματα, όπως φαίνεται για παράδειγμα στο Σχήμα Υπολογισμός εσωτερικών παραμέτρων της κάμερας Για τον υπολογισμό των εσωτερικών παραμέτρων, χρησιμοποιήσαμε μια λήψη στην οποία γνωρίζαμε τη θέση, τον προσανατολισμό της κάμερας και τη θέση των σημείων στο χώρο. Επιπλέον, η σωστή θέση των pixel για κάθε ένα από τα σημεία του χώρου i, j έχει βρεθεί χειροκίνητα. gt, k gt, k Πίνακας 2. Συντεταγμένες των pixel της εικόνας για τη λήψη του Σχήματος 3 Σημείο igt jgt Για να γνωρίζουμε με ακρίβεια τη γωνία με την οποία ήταν προσανατολισμένη η κάμερα στο χώρο, χρησιμοποιήσαμε μια εξαντλητική επαναληπτική μέθοδο αναζήτησης της γωνίας γύρω από τον άξονα z. Συγκεκριμένα, θεωρήσαμε της γωνίες, να είναι μηδέν και τη κάμερα να περιστρέφεται μόνο γύρω από το z. Για κάθε θz x y υπολογίζουμε τον πίνακα R βάσει των (11), (12), (13) και (14) και στη συνέχεια μέσω των σχέσεων (27) και (28) υπολογίζουμε την επαναπροβολή των σημείων ( j gt, k, i gt, k ) του χώρου στον αισθητήρα της κάμερας (ik, jk). Δημιουργήσαμε μια μέθοδο υπολογισμού λάθους, όπου για κάθε γωνία, υπολογίζαμε την απόσταση μεταξύ των τιμών k, gt, k ik, i gt, k των σχέσεων (27), (28). j j και των k gt, k k gt, k 2 2 (35) k err j j i i
19 Η γωνία που επιλέγαμε τελικά ήταν αυτή που αντιστοιχούσε στη τιμή του err με το ελάχιστο άθροισμα αποστάσεων, όπως φαίνεται και στο Σχήμα 5. Σχήμα 5. Γραφική αναπαράσταση απόκλισης με γωνία κάμερας 3.2. Εύρεση θέσης και προσανατολισμού κάμερας Αφού βρήκαμε τις εσωτερικές παραμέτρους της κάμεράς μας, μπορούμε να βρούμε και την θέση της στο χώρο. Κατά την διεξαγωγή των πειραμάτων, μετακινούσαμε την κάμερα στο χώρο και την περιστρέφαμε αναλόγως ώστε να βρίσκονται εντός πλάνου τα 10 σημεία του χώρου που είχαμε επιλέξει. Για κάθε θέση που παίρναμε μια λήψη, σημειώναμε τις συντεταγμένες της κάμερας στο σύστημα συντεταγμένων του χώρου (Πίνακας 1), ώστε να μπορούμε να επαληθεύσουμε τα αποτελέσματα του αλγορίθμου. Η μέτρηση της γωνίας για κάθε εικόνα όμως δε μπορούσε να γίνει με ακρίβεια. Για να γνωρίζουμε τη γωνία με την οποία ήταν περιεστρεμμένη η κάμερα για κάθε λήψη, εφαρμόσαμε τη μέθοδο υπολογισμού λάθους που περιγράφεται στη Σχέση (35). Οι γωνίες που υπολογίσαμε για τις 7 εικόνες είναι οι εξής: Πίνακας 3. Οι γωνίες για κάθε εικόνα Γωνία θz (μοίρες) Εικόνα Εικόνα Εικόνα Εικόνα Εικόνα
20 Εικόνα Εικόνα Συγκεκριμένα, χρησιμοποιήσαμε το Σχήμα 3 και υπολογίσαμε τις σχέσεις (21),(22) όπως αναφέραμε και στο κεφάλαιο 2. Επομένως, μπορούμε με βάση τις παραπάνω σχέσεις να επαναπροβάλλουμε τις συντεταγμένες των σημείων πάνω στην εικόνα. Για κάθε εικόνα, η επαναπροβολή των σημείων στην εικόνα, είναι οι εξής:

21
22

23

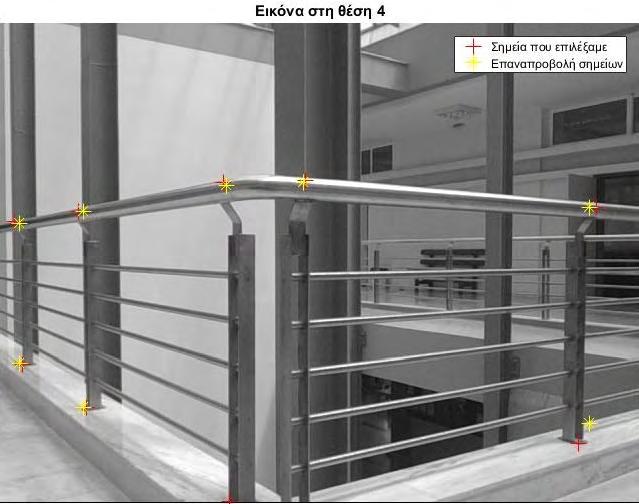
24

25 Στις παραπάνω εικόνες, παρατηρούμε ότι, η επαναπροβολή των σημείων δεν γίνεται με απόλυτη ακρίβεια. Αυτό οφείλεται σε σφάλματα των μετρήσεων των συντεταγμένων του χώρου [2] ή/και στην απλότητα του μαθηματικού μοντέλου της κάμερας που χρησιμοποιήσαμε. Έχοντας υπολογίσει τις εσωτερικές παραμέτρους της κάμερας, μπορούμε να υπολογίσουμε τις εξωτερικές παραμέτρους μέσω των σχέσεων (14),(15),(16) όπως αναλύσαμε στο κεφάλαιο 2.Σε ότι αφορά την απόκλιση του υπολογισμού θέσης και προσανατολισμού της κάμερα σε σχέση με τις πραγματικές θέσεις, η απόκλιση είναι αρκετά μικρή, όπως φαίνεται στον Πίνακα 4. Πίνακας 4. Οι πραγματικές θέσεις της κάμερας, οι υπολογιζόμενες θέσεις της κάμερας μέσω της μεθόδου που ακολουθήθηκε και τα μέσα σφάλματα Θέση κάμερας Εικόνα Πραγματική Υπολογισμένη 1 [83,-155,83] [79,-151,86] 2 [110,-120,83] [95,-104,91]
26 3 [126,-90,83] [105,-79,88] 4 [126,-62,83] [115,-60,85] 5 [130,-167,83] [126,-171,85] 6 [53,-187,83] [53,-187,83] 7 [36,-187,83] [44,-193,83] Επομένως, έχοντας υπολογίσει τη θέση στην οποία βρισκόταν η κάμερα για κάθε λήψη, μπορούμε να δημιουργήσουμε ένα χάρτη με τη διαδρομή που ακολούθησε. Οι εφτά θέσεις που πραγματοποιήσαμε λήψεις απεικονίζονται στο Σχήμα 6: Σχήμα 6. Θέσεις της κάμερας κατά τη διάρκεια των πειραμάτων Για τον υπολογισμό του πίνακα περιστροφής, υπολογίζουμε τους αγνώστους μέσω του συστήματος (16) και κάνοντας εξωτερικό γινόμενο τη πρώτη με τη δεύτερη γραμμή του πίνακα περιστροφής, ανακτούμε τη τρίτη γραμμή με αγνώστους [4]. Είναι σημαντικό να παρατηρήσουμε ότι, αντιστρέφοντας τα πρόσημα του πίνακα περιστροφής για κάποιο άξονα, το σημείο που υπολογίζουμε σε αυτή τη περίπτωση είναι ακριβώς το αντισυμμετρικό σημείο από τη πραγματική θέση. Μαθηματικά και οι δύο περιπτώσεις αποτελούν λύσεις του προβλήματος. Η ασάφεια σχετικά με το πρόσημο της λύσης, επιλύεται με βάση πρακτικούς χωρικούς περιορισμούς. Στο συγκεκριμένο πείραμα, η z-συνιστώσα της θέσης της κάμερας δε μπορεί να είναι αρνητική. Ισοδύναμα, η θέση της κάμερας δε μπορεί να βρίσκεται κάτω από το επίπεδο του δαπέδου. Στην περίπτωση λοιπόν που από μαθηματική λύση προκύψει
27 Tz<0, τότε αλλάζουμε τα πρόσημα όλων των στοιχείων της λύσης, κάτι που εκφράζεται μέσω των σχέσεων: Tx, Ty, Tz Tx, Ty, Tz RR (36, 37) Συνδυάζοντας τα παραπάνω δεδομένα και μέσω της σχέσης (10) μπορούμε να δείξουμε τη θέση και τον προσανατολισμό της κάμερας για κάθε θέση όπως φαίνεται στο Σχήμα 7: Σχήμα 7. Θέσεις και προσανατολισμός της κάμερας για όλα τις λήψεις. Για 7 εικόνες που χρησιμοποιήθηκαν, η μέση τιμή του σφάλματος των μετρήσεων είναι 5,9 εκατοστά ανά εικόνα, ενώ η απόκλιση ανά άξονα ήταν (8, 6.4, 3) cm για τους άξονες X, Y και Z αντίστοιχα. Πιο αναλυτικά αποτελέσματα δίνονται στον Πίνακα 5. Πίνακας 5. Οι αποκλίσεις των υπολογισμένων θέσεων από τις μετρήσεις Σφάλμα υπολογισμού θέσης κάμερας (cm) Άξονας X Άξονας Y Άξονας Z Μέση απόκλιση εικόνας Εικόνα ,6
28 Εικόνα Εικόνα Εικόνα ,3 Εικόνα ,3 Εικόνα Εικόνα ,3
29 4. Συμπεράσματα Στην παρούσα πτυχιακή υλοποιήθηκε μία μαθηματική μέθοδος εύρεσης της θέσης και του προσανατολισμού της άγνωστης κάμερας από μία μόνο λήψη που περιέχει ένα σύμβολο γνωστών σημείων. Η μέθοδος βασίζεται στη βαθμονόμησης τη κάμερας. Σε περίπτωση κάμερας άγνωστων εσωτερικών παραμέτρων, σχεδιάσαμε και διεξήγαμε πείραμα το οποίο υπολογίζει τις εσωτερικές παραμέτρους με γνωστή τη θέση της κάμερας στο χώρο. Σύμφωνα με τα πειράματα, η μέση τιμή του σφάλματος της θέσης της κάμερας ήταν είναι 5,9 εκατοστά ανά εικόνα, ενώ το μέσο σφάλμα ανά άξονα κυμαίνεται από 3 cm έως 8 cm. Η μέθοδος που ακολουθήσαμε είναι επιρρεπής σε θόρυβο και τα αποτελέσματα εξαρτώνται πολύ από την ακρίβεια των συντεταγμένων των σημείων αλλά και τη ακριβή επιλογή των συντεταγμένων των σημείων στη εικόνα [2], [3]. Σε περίπτωση αύξησης του πλήθους των σημείων, η εξάρτηση από το θόρυβο μειώνεται. Η ακρίβεια των αποτελεσμάτων μπορεί να βελτιωθεί αν εφαρμοστούν μέθοδοι μη γραμμικής βελτιστοποίησης, ή /και μοντέλα παραμόρφωσης της εικόνας από την κάμερα. Για τη βελτίωση της ευελιξίας του συστήματος, μελλοντικά μπορεί να υλοποιηθεί αλγόριθμος για την αυτόματη επιλογή σημείων. Σε αυτή την περίπτωση, η εκτέλεση της διαδικασίας σε πραγματικό χρόνο θα πρέπει να μελετηθεί ξεχωριστά.
30 Αναφορές [1] Hartley, Richard, and Andrew Zisserman. Multiple view geometry in computer vision. Cambridge university press, [2] Tsai, Roger Y. "A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses." Robotics and Automation, IEEE Journal of 3.4 (1987): [3] Zhang, Z. (2000). A flexible new technique for camera calibration. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 22(11), [4] Horn, B. K. (2000). Tsai s camera calibration method revisited. Online: csail. mit. edu/bkph/articles/tsai_revisited. pdf. [5] Paige, Christopher C., and Michael A. Saunders. "Solution of sparse indefinite systems of linear equations." SIAM journal on numerical analysis 12.4 (1975): [6] Baker, K. (2005). Singular value decomposition tutorial. The Ohio State University, 24. [7] Millot, Yannick, and Pascal P. Man. "Active and passive rotations with Euler angles in NMR." Concepts in Magnetic Resonance Part A 40.5 (2012): [8] Hartley, Richard I. "In defense of the eight-point algorithm." Pattern Analysis and Machine Intelligence, IEEE Transactions on 19.6 (1997): [9] Thrun, S., Burgard, W., & Fox, D. (2000). A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping. In Robotics and Automation, Proceedings. ICRA'00. IEEE International Conference on (Vol. 1, pp ). IEEE. [10] Leonard, John J., Hugh F. Durrant-Whyte, and Ingemar J. Cox. "Dynamic map building for an autonomous mobile robot." The International Journal of Robotics Research 11.4 (1992): [11] F. Lu and E. Milios. Robot pose estimation in unknown environments by matching 2d range scans. Journal of Intelligent and Robotic Systems, [12] Agrawal, M., & Konolige, K. (2006, August). Real-time localization in outdoor environments using stereo vision and inexpensive gps. In Pattern Recognition, ICPR th International Conference on (Vol. 3, pp ). IEEE. [13] Garcia, M. A., & Solanas, A. (2004, April). 3D simultaneous localization and modeling from stereo vision. In Robotics and Automation, Proceedings. ICRA' IEEE International Conference on (Vol. 1, pp ). IEEE.
31 [14] Lu, X., & Manduchi, R. (2005, April). Detection and localization of curbs and stairways using stereo vision. In ICRA (Vol. 5, pp ). [15] Biswas, J., & Veloso, M. (2012, May). Depth camera based indoor mobile robot localization and navigation. In Robotics and Automation (ICRA), 2012 IEEE International Conference on (pp ). IEEE. [16] D. H ahnel, W. Burgard, and S. Thrun. Learning compact 3D models of indoor and outdoor environments with a mobile robot. Robotics and Autonomous Systems, 44(1):15 27, [17] H. Durrant-Whyte and T. Bailey. Simultaneous localization and mapping: part I. Robotics & Automation Magazine, IEEE, 13(2):99 110, [18] Choi, Byoung-Suk, et al. "A hierarchical algorithm for indoor mobile robot localization using RFID sensor fusion." Industrial Electronics, IEEE Transactions on 58.6 (2011): [19] R. C. Luo, C.-T. Chuang, and S.-S. Huang, RFID-based indoor antenna localization system using passive tag and variable RF-attenuation, in Proc. IEEE Int. Conf. Ind. Electron., 2007, pp [20] D. Hahnel, W. Burgard, D. Fox, K. Fishkin, and M. Philipose, Mapping and localization with RFID technology, in Proc. IEEE Int. Conf. Robot. Autom., 2004, pp [21] O. Serrano, J.M. Canas, V. Matellan, and L. Rodero. Robot localization using WiFi signal without intensity map. WAF04, March, [22] M. Ocana, LM Bergasa, MA Sotelo, J. Nuevo, and R. Flores. Indoor Robot Localization System Using WiFi Signal Measure and Minimizing Calibration Effort. In Proceedings of the IEEE International Symposium on Industrial Electronics, pages , [23] Biswas, J., & Veloso, M. M. (2010). Wifi localization and navigation for autonomous indoor mobile robots. [24] Davison, Andrew J., et al. "MonoSLAM: Real-time single camera SLAM." Pattern Analysis and Machine Intelligence, IEEE Transactions on 29.6 (2007): [25] Delibasis, K. K., Plagianakos, V. P., & Maglogiannis, I. (2013). Real time indoor robot localization using a stationary fisheye camera. In Artificial Intelligence Applications and Innovations (pp ). Springer Berlin Heidelberg. [26] C.G. Harris and J.M. Pike, 3D Positional Integration from Image Sequences, Proc. Third Alvey Vision Conf., pp , [27] M. Betke, L. Gurvits, Mobile Robot Localization Using Landmarks, IEEE Transactions on Robotics and Automation, vol. 13, No 2, Pape(s): ,1997. [28] Lee, Sungho, and Inso Kweon. "Color landmark based self-localization for indoor mobile robots." Robotics and Automation, Proceedings. ICRA'02. IEEE International Conference on. Vol. 1. IEEE, 2002.
32 [29] Yoon, Kuk-Jin, et al. "Color landmark based self-localization for indoor mobile robots." Journal of Institute of Control, Robotics and Systems 7.9 (2001):
33
Βαθμονόμηση κάμερας Camera Calibration. Κ Δελήμπασης 1
 Βαθμονόμηση κάμερας Camera Calibration Κ Δελήμπασης 1 Βασικές αρχές σχηματισμού εικόνας Σκοτεινός θάλαμος Pinhole camera camera obscura Απόσταση αντικ - κάμ Απόσταση κάμ - είδωλο Ομοια τριγωνα Ομοια τριγωνα
Βαθμονόμηση κάμερας Camera Calibration Κ Δελήμπασης 1 Βασικές αρχές σχηματισμού εικόνας Σκοτεινός θάλαμος Pinhole camera camera obscura Απόσταση αντικ - κάμ Απόσταση κάμ - είδωλο Ομοια τριγωνα Ομοια τριγωνα
Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Τμήμα Μαθηματικών Π.Μ.Σ. Θεωρητικής Πληροφορικής και Θεωρίας Συστημάτων και Ελέγχου
 Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Τμήμα Μαθηματικών Π.Μ.Σ. Θεωρητικής Πληροφορικής και Θεωρίας Συστημάτων και Ελέγχου Κάθε εικόνα μπορεί να αναπαρασταθεί με έναν πίνακα, κάθε κελί του οποίου αντιστοιχεί
Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης Τμήμα Μαθηματικών Π.Μ.Σ. Θεωρητικής Πληροφορικής και Θεωρίας Συστημάτων και Ελέγχου Κάθε εικόνα μπορεί να αναπαρασταθεί με έναν πίνακα, κάθε κελί του οποίου αντιστοιχεί
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER
 4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
4. ΚΕΦΑΛΑΙΟ ΕΦΑΡΜΟΓΕΣ ΤΟΥ ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΥ FOURIER Σκοπός του κεφαλαίου είναι να παρουσιάσει μερικές εφαρμογές του Μετασχηματισμού Fourier (ΜF). Ειδικότερα στο κεφάλαιο αυτό θα περιγραφούν έμμεσοι τρόποι
ΕΥΡΕΣΗ ΤΟΥ ΔΙΑΝΥΣΜΑΤΟΣ ΘΕΣΗΣ ΚΙΝΟΥΜΕΝΟΥ ΡΟΜΠΟΤ ΜΕ ΜΟΝΟΦΘΑΛΜΟ ΣΥΣΤΗΜΑ ΟΡΑΣΗΣ
 ΕΥΡΕΣΗ ΤΟΥ ΔΙΑΝΥΣΜΑΤΟΣ ΘΕΣΗΣ ΚΙΝΟΥΜΕΝΟΥ ΡΟΜΠΟΤ ΜΕ ΜΟΝΟΦΘΑΛΜΟ ΣΥΣΤΗΜΑ ΟΡΑΣΗΣ Νικόλαος Κυριακούλης *, Ευάγγελος Καρακάσης, Αντώνιος Γαστεράτος, Δημήτριος Κουλουριώτης, Σπυρίδων Γ. Μουρούτσος Δημοκρίτειο
ΕΥΡΕΣΗ ΤΟΥ ΔΙΑΝΥΣΜΑΤΟΣ ΘΕΣΗΣ ΚΙΝΟΥΜΕΝΟΥ ΡΟΜΠΟΤ ΜΕ ΜΟΝΟΦΘΑΛΜΟ ΣΥΣΤΗΜΑ ΟΡΑΣΗΣ Νικόλαος Κυριακούλης *, Ευάγγελος Καρακάσης, Αντώνιος Γαστεράτος, Δημήτριος Κουλουριώτης, Σπυρίδων Γ. Μουρούτσος Δημοκρίτειο
Real time mobile robot control with a multiresolution map representation
 IIC 06 21 Real time mobile robot control with a multiresolution map representation Katsuya Iwata, Shinkichi Inagaki, Yusuke Nara, Tatsuya Suzuki (Nagoya University) Abstract In this paper a real-time path
IIC 06 21 Real time mobile robot control with a multiresolution map representation Katsuya Iwata, Shinkichi Inagaki, Yusuke Nara, Tatsuya Suzuki (Nagoya University) Abstract In this paper a real-time path
Indoor Augmented Reality Guide for Mediterranean College. Φώτης Παπαχρήστος
 Indoor Augmented Reality Guide for Mediterranean College Φώτης Παπαχρήστος Επαυξημένη Πραγματικότητα Πραγματικότητα: Το σύνολο των υπαρκτών πραγμάτων ή δεδομένων. Επαυξημένη πραγματικότητα: Ένα μοντέλο
Indoor Augmented Reality Guide for Mediterranean College Φώτης Παπαχρήστος Επαυξημένη Πραγματικότητα Πραγματικότητα: Το σύνολο των υπαρκτών πραγμάτων ή δεδομένων. Επαυξημένη πραγματικότητα: Ένα μοντέλο
Θέση και Προσανατολισμός
 Κεφάλαιο 2 Θέση και Προσανατολισμός 2-1 Εισαγωγή Προκειμένου να μπορεί ένα ρομπότ να εκτελέσει κάποιο έργο, πρέπει να διαθέτει τρόπο να περιγράφει τα εξής: Τη θέση και προσανατολισμό του τελικού στοιχείου
Κεφάλαιο 2 Θέση και Προσανατολισμός 2-1 Εισαγωγή Προκειμένου να μπορεί ένα ρομπότ να εκτελέσει κάποιο έργο, πρέπει να διαθέτει τρόπο να περιγράφει τα εξής: Τη θέση και προσανατολισμό του τελικού στοιχείου
Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο
 Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο Σύνοψη Στο κεφάλαιο αυτό παρουσιάζεται η ιδέα του συμπτωτικού πολυωνύμου, του πολυωνύμου, δηλαδή, που είναι του μικρότερου δυνατού βαθμού και που, για συγκεκριμένες,
Κεφάλαιο 5. Το Συμπτωτικό Πολυώνυμο Σύνοψη Στο κεφάλαιο αυτό παρουσιάζεται η ιδέα του συμπτωτικού πολυωνύμου, του πολυωνύμου, δηλαδή, που είναι του μικρότερου δυνατού βαθμού και που, για συγκεκριμένες,
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΜΗΜΑ. Μαθηματικά 1. Σταύρος Παπαϊωάννου
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΜΗΜΑ Μαθηματικά Σταύρος Παπαϊωάννου Ιούνιος 05 Τίτλος Μαθήματος Περιεχόμενα Χρηματοδότηση.. Σφάλμα! Δεν έχει οριστεί σελιδοδείκτης. Σκοποί Μαθήματος
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΤΜΗΜΑ Μαθηματικά Σταύρος Παπαϊωάννου Ιούνιος 05 Τίτλος Μαθήματος Περιεχόμενα Χρηματοδότηση.. Σφάλμα! Δεν έχει οριστεί σελιδοδείκτης. Σκοποί Μαθήματος
21 a 22 a 2n. a m1 a m2 a mn
 Παράρτημα Α Βασική γραμμική άλγεβρα Στην ενότητα αυτή θα παρουσιαστούν με συνοπτικό τρόπο βασικές έννοιες της γραμμικής άλγεβρας. Ο στόχος της ενότητας είναι να αποτελέσει ένα άμεσο σημείο αναφοράς και
Παράρτημα Α Βασική γραμμική άλγεβρα Στην ενότητα αυτή θα παρουσιαστούν με συνοπτικό τρόπο βασικές έννοιες της γραμμικής άλγεβρας. Ο στόχος της ενότητας είναι να αποτελέσει ένα άμεσο σημείο αναφοράς και
ΔΙΕΡΕΥΝΗΣΗ ΤΟΥ ΠΡΟΒΛΗΜΑΤΟΣ ΤΗΣ ΑΠΟΡΡΟΗΣ ΤΩΝ ΟΜΒΡΙΩΝ ΣΕ ΚΡΙΣΙΜΕΣ ΓΙΑ ΤΗΝ ΑΣΦΑΛΕΙΑ ΠΕΡΙΟΧΕΣ ΤΩΝ ΟΔΙΚΩΝ ΧΑΡΑΞΕΩΝ
 ΔΙΕΡΕΥΝΗΣΗ ΤΟΥ ΠΡΟΒΛΗΜΑΤΟΣ ΤΗΣ ΑΠΟΡΡΟΗΣ ΤΩΝ ΟΜΒΡΙΩΝ ΣΕ ΚΡΙΣΙΜΕΣ ΓΙΑ ΤΗΝ ΑΣΦΑΛΕΙΑ ΠΕΡΙΟΧΕΣ ΤΩΝ ΟΔΙΚΩΝ ΧΑΡΑΞΕΩΝ Ν. Ε. Ηλιού Αναπληρωτής Καθηγητής Τμήματος Πολιτικών Μηχανικών Πανεπιστημίου Θεσσαλίας Γ. Δ.
ΔΙΕΡΕΥΝΗΣΗ ΤΟΥ ΠΡΟΒΛΗΜΑΤΟΣ ΤΗΣ ΑΠΟΡΡΟΗΣ ΤΩΝ ΟΜΒΡΙΩΝ ΣΕ ΚΡΙΣΙΜΕΣ ΓΙΑ ΤΗΝ ΑΣΦΑΛΕΙΑ ΠΕΡΙΟΧΕΣ ΤΩΝ ΟΔΙΚΩΝ ΧΑΡΑΞΕΩΝ Ν. Ε. Ηλιού Αναπληρωτής Καθηγητής Τμήματος Πολιτικών Μηχανικών Πανεπιστημίου Θεσσαλίας Γ. Δ.
ΕΡΕΥΝΗΤΙΚΑ ΠΡΟΓΡΑΜΜΑΤΑ ΑΡΧΙΜΗΔΗΣ ΕΝΙΣΧΥΣΗ ΕΡΕΥΝΗΤΙΚΩΝ ΟΜΑΔΩΝ ΣΤΟ ΤΕΙ ΣΕΡΡΩΝ. Ενέργεια. 2.2.3.στ ΘΕΜΑ ΕΡΕΥΝΑΣ: ΔΙΑΡΘΡΩΣΗ ΠΕΡΙΕΧΟΜΕΝΟΥ ΕΧΡΩΜΩΝ ΕΓΓΡΑΦΩΝ
 ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ (Τ.Ε.Ι.) ΣΕΡΡΩΝ Τμήμα ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΡΕΥΝΗΤΙΚΑ ΠΡΟΓΡΑΜΜΑΤΑ ΑΡΧΙΜΗΔΗΣ ΕΝΙΣΧΥΣΗ ΕΡΕΥΝΗΤΙΚΩΝ ΟΜΑΔΩΝ ΣΤΟ ΤΕΙ ΣΕΡΡΩΝ Ενέργεια. 2.2.3.στ ΘΕΜΑ ΕΡΕΥΝΑΣ: ΔΙΑΡΘΡΩΣΗ
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ (Τ.Ε.Ι.) ΣΕΡΡΩΝ Τμήμα ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΕΡΕΥΝΗΤΙΚΑ ΠΡΟΓΡΑΜΜΑΤΑ ΑΡΧΙΜΗΔΗΣ ΕΝΙΣΧΥΣΗ ΕΡΕΥΝΗΤΙΚΩΝ ΟΜΑΔΩΝ ΣΤΟ ΤΕΙ ΣΕΡΡΩΝ Ενέργεια. 2.2.3.στ ΘΕΜΑ ΕΡΕΥΝΑΣ: ΔΙΑΡΘΡΩΣΗ
L-SLAM: Μείωση διαστάσεων στην οικογένεια αλγορίθµων FastSLAM
 L-SLAM: Μείωση διαστάσεων στην οικογένεια αλγορίθµων FastSLAM Πετρίδης Βασίλειος, Ζήκος Νικόλαος Αριστοτέλειο Πανεπιστήµιο Θεσσαλονίκης ΠΕΡΙΛΗΨΗ Στο παρών άρθρο προτείνεται µια νέα µέθοδος χαρτογράφησης
L-SLAM: Μείωση διαστάσεων στην οικογένεια αλγορίθµων FastSLAM Πετρίδης Βασίλειος, Ζήκος Νικόλαος Αριστοτέλειο Πανεπιστήµιο Θεσσαλονίκης ΠΕΡΙΛΗΨΗ Στο παρών άρθρο προτείνεται µια νέα µέθοδος χαρτογράφησης
Ιδιάζουσες τιμές πίνακα. y έχουμε αντίστοιχα τις σχέσεις : Αυτές οι παρατηρήσεις συμβάλλουν στην παραγοντοποίηση ενός πίνακα
 Ιδιάζουσες τιμές πίνακα Επειδή οι πίνακες που παρουσιάζονται στις εφαρμογές είναι μη τετραγωνικοί, υπάρχει ανάγκη να βρεθεί μία μέθοδος που να «μελετά» τους μη τετραγωνικούς με «μεθόδους και ποσά» που
Ιδιάζουσες τιμές πίνακα Επειδή οι πίνακες που παρουσιάζονται στις εφαρμογές είναι μη τετραγωνικοί, υπάρχει ανάγκη να βρεθεί μία μέθοδος που να «μελετά» τους μη τετραγωνικούς με «μεθόδους και ποσά» που
Παραδείγματα Ιδιοτιμές Ιδιοδιανύσματα
 Παραδείγματα Ιδιοτιμές Ιδιοδιανύσματα Παράδειγμα Να βρείτε τις ιδιοτιμές και τα αντίστοιχα ιδιοδιανύσματα του πίνακα A 4. Επίσης να προσδιοριστούν οι ιδιοχώροι και οι γεωμετρικές πολλαπλότητες των ιδιοτιμών.
Παραδείγματα Ιδιοτιμές Ιδιοδιανύσματα Παράδειγμα Να βρείτε τις ιδιοτιμές και τα αντίστοιχα ιδιοδιανύσματα του πίνακα A 4. Επίσης να προσδιοριστούν οι ιδιοχώροι και οι γεωμετρικές πολλαπλότητες των ιδιοτιμών.
ΚΕΦΑΛΑΙΟ 2: ΟΡΙΖΟΥΣΕΣ
 ΚΕΦΑΛΑΙΟ ΚΕΦΑΛΑΙΟ :. ΕΙΣΑΓΩΓΗ Σε κάθε τετραγωνικό πίνακα ) τάξης n θα αντιστοιχίσουμε έναν πραγματικό ( ij αριθμό, τον οποίο θα ονομάσουμε ορίζουσα του πίνακα. Η ορίζουσα θα συμβολίζεται det ή Α ή n n
ΚΕΦΑΛΑΙΟ ΚΕΦΑΛΑΙΟ :. ΕΙΣΑΓΩΓΗ Σε κάθε τετραγωνικό πίνακα ) τάξης n θα αντιστοιχίσουμε έναν πραγματικό ( ij αριθμό, τον οποίο θα ονομάσουμε ορίζουσα του πίνακα. Η ορίζουσα θα συμβολίζεται det ή Α ή n n
Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση Ι. Λυχναρόπουλος
 6/6/06 Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση Ι. Λυχναρόπουλος Άσκηση (Μονάδες ) 0 Δίνεται ο πίνακας A =. Nα υπολογίσετε την βαθμίδα του και να βρείτε τη διάσταση και από μία βάση α) του μηδενοχώρου
6/6/06 Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση Ι. Λυχναρόπουλος Άσκηση (Μονάδες ) 0 Δίνεται ο πίνακας A =. Nα υπολογίσετε την βαθμίδα του και να βρείτε τη διάσταση και από μία βάση α) του μηδενοχώρου
ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ (Εξ. Ιουνίου - 02/07/08) ΕΠΙΛΕΓΜΕΝΕΣ ΑΠΑΝΤΗΣΕΙΣ
 ΕΠΙΛΕΓΜΕΝΕΣ ΑΠΑΝΤΗΣΕΙΣ") Ονοματεπώνυμο:......... Α.Μ....... Ετος... ΑΙΘΟΥΣΑ:....... I. (περί τις 55μ. = ++5++. Σωστό ή Λάθος: ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ (Εξ. Ιουνίου - //8 ΕΠΙΛΕΓΜΕΝΕΣ ΑΠΑΝΤΗΣΕΙΣ (αʹ Αν AB = BA όπου A, B τετραγωνικά και
Ονοματεπώνυμο:......... Α.Μ....... Ετος... ΑΙΘΟΥΣΑ:....... I. (περί τις 55μ. = ++5++. Σωστό ή Λάθος: ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ (Εξ. Ιουνίου - //8 ΕΠΙΛΕΓΜΕΝΕΣ ΑΠΑΝΤΗΣΕΙΣ (αʹ Αν AB = BA όπου A, B τετραγωνικά και
Εισαγωγή στις Τηλεπικοινωνίες. Δομή της παρουσίασης
 1 Oct 16 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΙΡΑΙΩΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΜΗΜΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΤΗΛΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Εισαγωγή στις Τηλεπικοινωνίες Διάλεξη 4 η Γεωμετρική Αναπαράσταση
1 Oct 16 ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΕΙΡΑΙΩΣ ΣΧΟΛΗ ΤΕΧΝΟΛΟΓΙΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ & ΕΠΙΚΟΙΝΩΝΙΩΝ ΤΜΗΜΑ ΨΗΦΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΕΡΓΑΣΤΗΡΙΟ ΤΗΛΕΠΙΚΟΙΝΩΝΙΑΚΩΝ ΣΥΣΤΗΜΑΤΩΝ Εισαγωγή στις Τηλεπικοινωνίες Διάλεξη 4 η Γεωμετρική Αναπαράσταση
Γραφικά με υπολογιστές. Διδάσκων: Φοίβος Μυλωνάς. Διαλέξεις #11-#12
 Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Χειμερινό εξάμηνο Γραφικά με υπολογιστές Διδάσκων: Φοίβος Μυλωνάς fmlonas@ionio.gr Διαλέξεις #-# Σύνθεση Δ Μετασχηματισμών Ομογενείς Συντεταγμένες Παραδείγματα Μετασχηματισμών
Ιόνιο Πανεπιστήμιο Τμήμα Πληροφορικής Χειμερινό εξάμηνο Γραφικά με υπολογιστές Διδάσκων: Φοίβος Μυλωνάς fmlonas@ionio.gr Διαλέξεις #-# Σύνθεση Δ Μετασχηματισμών Ομογενείς Συντεταγμένες Παραδείγματα Μετασχηματισμών
Συστήματα συντεταγμένων
 Συστήματα συντεταγμένων Χρησιμοποιούνται για την περιγραφή της θέσης ενός σημείου στον χώρο. Κοινά συστήματα συντεταγμένων: Καρτεσιανό (x, y, z) Πολικό (r, θ) Καρτεσιανό σύστημα συντεταγμένων Οι άξονες
Συστήματα συντεταγμένων Χρησιμοποιούνται για την περιγραφή της θέσης ενός σημείου στον χώρο. Κοινά συστήματα συντεταγμένων: Καρτεσιανό (x, y, z) Πολικό (r, θ) Καρτεσιανό σύστημα συντεταγμένων Οι άξονες
Θέμα 1. με επαυξημένο 0 1 1/ 2. πίνακα. και κλιμακωτή μορφή αυτού
 ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ ΓΙΑ ΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ Ι (ΘΕ ΠΛΗ ) ΕΝΔΕΙΚΤΙΚΕΣ ΛΥΣΕΙΣ ΕΠΑΝΑΛΗΠΤΙΚΗΣ ΕΞΕΤΑΣΗΣ Ιουλίου 0 Θέμα α) (Μον.6) Να βρεθεί η τιμή του πραγματικού
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ ΓΙΑ ΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ Ι (ΘΕ ΠΛΗ ) ΕΝΔΕΙΚΤΙΚΕΣ ΛΥΣΕΙΣ ΕΠΑΝΑΛΗΠΤΙΚΗΣ ΕΞΕΤΑΣΗΣ Ιουλίου 0 Θέμα α) (Μον.6) Να βρεθεί η τιμή του πραγματικού
Λυμένες ασκήσεις στροφορμής
 Λυμένες ασκήσεις στροφορμής Θα υπολογίσουμε τη δράση των τελεστών κλίμακας J ± σε μια τυχαία ιδιοκατάσταση j, m των τελεστών J και Jˆ. Λύση Δείξαμε ότι η κατάσταση Jˆ± j, m είναι επίσης ιδιοκατάσταση των
Λυμένες ασκήσεις στροφορμής Θα υπολογίσουμε τη δράση των τελεστών κλίμακας J ± σε μια τυχαία ιδιοκατάσταση j, m των τελεστών J και Jˆ. Λύση Δείξαμε ότι η κατάσταση Jˆ± j, m είναι επίσης ιδιοκατάσταση των
Σχεδιασμός Κίνησης σε Δισδιάστατα Περιβάλλοντα που Περιλαμβάνουν Εμπόδια Άγνωστης Τροχιάς
 Σχεδιασμός Κίνησης σε Δισδιάστατα Περιβάλλοντα που Περιλαμβάνουν Εμπόδια Άγνωστης Τροχιάς Ηλίας Κ. Ξυδιάς, Φίλιππος Ν. Αζαριάδης Τμήμα Μηχανικών Σχεδίασης Προϊόντων & Συστημάτων, Πανεπιστήμιο Αιγαίου,
Σχεδιασμός Κίνησης σε Δισδιάστατα Περιβάλλοντα που Περιλαμβάνουν Εμπόδια Άγνωστης Τροχιάς Ηλίας Κ. Ξυδιάς, Φίλιππος Ν. Αζαριάδης Τμήμα Μηχανικών Σχεδίασης Προϊόντων & Συστημάτων, Πανεπιστήμιο Αιγαίου,
ΕΡΩΤΗΣΕΙΣ ΘΕΩΡΙΑΣ ΜΑΘΗΜΑΤΙΚΑ Β ΓΥΜΝΑΣΙΟΥ. ΜΕΡΟΣ 1ο ΑΛΓΕΒΡΑ
 1. Τι καλείται μεταβλητή; ΕΡΩΤΗΣΕΙΣ ΘΕΩΡΙΑΣ ΜΑΘΗΜΑΤΙΑ Β ΓΥΜΝΑΣΙΟΥ ΜΕΡΟΣ 1ο ΑΛΓΕΒΡΑ Μεταβλητή είναι ένα γράμμα (π.χ., y, t, ) που το χρησιμοποιούμε για να παραστήσουμε ένα οποιοδήποτε στοιχείο ενός συνόλου..
1. Τι καλείται μεταβλητή; ΕΡΩΤΗΣΕΙΣ ΘΕΩΡΙΑΣ ΜΑΘΗΜΑΤΙΑ Β ΓΥΜΝΑΣΙΟΥ ΜΕΡΟΣ 1ο ΑΛΓΕΒΡΑ Μεταβλητή είναι ένα γράμμα (π.χ., y, t, ) που το χρησιμοποιούμε για να παραστήσουμε ένα οποιοδήποτε στοιχείο ενός συνόλου..
I. ΜΙΓΑΔΙΚΟΙ ΑΡΙΘΜΟΙ. math-gr
 I ΜΙΓΑΔΙΚΟΙ ΑΡΙΘΜΟΙ i e ΜΕΡΟΣ Ι ΟΡΙΣΜΟΣ - ΒΑΣΙΚΕΣ ΠΡΑΞΕΙΣ Α Ορισμός Ο ορισμός του συνόλου των Μιγαδικών αριθμών (C) βασίζεται στις εξής παραδοχές: Υπάρχει ένας αριθμός i για τον οποίο ισχύει i Το σύνολο
I ΜΙΓΑΔΙΚΟΙ ΑΡΙΘΜΟΙ i e ΜΕΡΟΣ Ι ΟΡΙΣΜΟΣ - ΒΑΣΙΚΕΣ ΠΡΑΞΕΙΣ Α Ορισμός Ο ορισμός του συνόλου των Μιγαδικών αριθμών (C) βασίζεται στις εξής παραδοχές: Υπάρχει ένας αριθμός i για τον οποίο ισχύει i Το σύνολο
Εφαρμοσμένα Μαθηματικά ΙΙ
 Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Γραμμικά Συστήματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Γραμμικό Σύστημα a11x1 + a12x2 + + a1 nxn = b1 a x + a x + +
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Γραμμικά Συστήματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Γραμμικό Σύστημα a11x1 + a12x2 + + a1 nxn = b1 a x + a x + +
Επίλυση Συστήματος Γραμμικών Διαφορικών Εξισώσεων
 Επίλυση Συστήματος Γραμμικών Διαφορικών Εξισώσεων. Γραμμικοί Μετασχηματισμοί Ανυσμάτων Θεωρούμε χώρο δύο διαστάσεων και συμβατικά ένα ορθογώνιο σύστημα αξόνων για την περιγραφή κάθε ανύσματος του χώρου
Επίλυση Συστήματος Γραμμικών Διαφορικών Εξισώσεων. Γραμμικοί Μετασχηματισμοί Ανυσμάτων Θεωρούμε χώρο δύο διαστάσεων και συμβατικά ένα ορθογώνιο σύστημα αξόνων για την περιγραφή κάθε ανύσματος του χώρου
Εφαρμοσμένα Μαθηματικά ΙΙ
 Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Ιδιοτιμές - Ιδιοδιανύσματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Χαρακτηριστικά Ποσά Τετράγωνου Πίνακα (Ιδιοτιμές Ιδιοδιανύσματα)
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Ιδιοτιμές - Ιδιοδιανύσματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Χαρακτηριστικά Ποσά Τετράγωνου Πίνακα (Ιδιοτιμές Ιδιοδιανύσματα)
ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ 12) ΕΡΓΑΣΙΑ 3 η Ημερομηνία Αποστολής στον Φοιτητή: 7 Ιανουαρίου 2008
 ΕΡΓΑΣΙΑ 3 η Ημερομηνία Αποστολής στον Φοιτητή: 7 Ιανουαρίου 2008") ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) ΕΡΓΑΣΙΑ η Ημερομηνία Αποστολής στον Φοιτητή: 7 Ιανουαρίου 8 Ημερομηνία παράδοσης της Εργασίας: Φεβρουαρίου 8 Πριν από την λύση κάθε άσκησης καλό
ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) ΕΡΓΑΣΙΑ η Ημερομηνία Αποστολής στον Φοιτητή: 7 Ιανουαρίου 8 Ημερομηνία παράδοσης της Εργασίας: Φεβρουαρίου 8 Πριν από την λύση κάθε άσκησης καλό
Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση 19/6/2018 Διδάσκων: Ι. Λυχναρόπουλος
 Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Άσκηση (Μονάδες.) Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση 9/6/08 Διδάσκων: Ι. Λυχναρόπουλος Έστω A= k και w = 3 0. Να βρεθεί η τιμή του k για την οποία
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Άσκηση (Μονάδες.) Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση 9/6/08 Διδάσκων: Ι. Λυχναρόπουλος Έστω A= k και w = 3 0. Να βρεθεί η τιμή του k για την οποία
ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ 12) ΕΡΓΑΣΙΑ 2 η Ημερομηνία Αποστολής στον Φοιτητή: 28 Νοεμβρίου 2011
 ΕΡΓΑΣΙΑ 2 η Ημερομηνία Αποστολής στον Φοιτητή: 28 Νοεμβρίου 2011") ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) ΕΡΓΑΣΙΑ η Ημερομηνία Αποστολής στον Φοιτητή: 8 Νοεμβρίου 0 Ημερομηνία παράδοσης της Εργασίας: 6 Ιανουαρίου 0 Οι ασκήσεις
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥΔΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) ΕΡΓΑΣΙΑ η Ημερομηνία Αποστολής στον Φοιτητή: 8 Νοεμβρίου 0 Ημερομηνία παράδοσης της Εργασίας: 6 Ιανουαρίου 0 Οι ασκήσεις
Εφαρμοσμένα Μαθηματικά ΙΙ
 Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Ιδιοτιμές - Ιδιοδιανύσματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Χαρακτηριστικά Ποσά Τετράγωνου Πίνακα (Ιδιοτιμές Ιδιοδιανύσματα)
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά ΙΙ Ιδιοτιμές - Ιδιοδιανύσματα Ιωάννης Λυχναρόπουλος Μαθηματικός, MSc, PhD Χαρακτηριστικά Ποσά Τετράγωνου Πίνακα (Ιδιοτιμές Ιδιοδιανύσματα)
Ενότητα 2. Ζωγραφίζοντας με το ΒΥΟΒ
 Ενότητα 2 : Ζωγραφίζοντας με το ΒΥΟΒ -1- Ενότητα 2. Ζωγραφίζοντας με το ΒΥΟΒ Κεφάλαιο 1: Κίνηση και γεωμετρικά σχήματα α. Θέση και προσανατολισμός της μορφής Η θέση της κάθε μορφής στο σκηνικό προσδιορίζεται
Ενότητα 2 : Ζωγραφίζοντας με το ΒΥΟΒ -1- Ενότητα 2. Ζωγραφίζοντας με το ΒΥΟΒ Κεφάλαιο 1: Κίνηση και γεωμετρικά σχήματα α. Θέση και προσανατολισμός της μορφής Η θέση της κάθε μορφής στο σκηνικό προσδιορίζεται
Να επιλύουμε και να διερευνούμε γραμμικά συστήματα. Να ορίζουμε την έννοια του συμβιβαστού και ομογενούς συστήματος.
 Ενότητα 2 Γραμμικά Συστήματα Στην ενότητα αυτή θα μάθουμε: Να επιλύουμε και να διερευνούμε γραμμικά συστήματα. Να ορίζουμε την έννοια του συμβιβαστού και ομογενούς συστήματος. Να ερμηνεύουμε γραφικά τη
Ενότητα 2 Γραμμικά Συστήματα Στην ενότητα αυτή θα μάθουμε: Να επιλύουμε και να διερευνούμε γραμμικά συστήματα. Να ορίζουμε την έννοια του συμβιβαστού και ομογενούς συστήματος. Να ερμηνεύουμε γραφικά τη
RobotArmy Περίληψη έργου
 RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
RobotArmy Περίληψη έργου Στην σημερινή εποχή η ανάγκη για αυτοματοποίηση πολλών διαδικασιών γίνεται όλο και πιο έντονη. Συνέχεια ακούγονται λέξεις όπως : βελτιστοποίηση ποιότητας ζωής, αυτοματοποίηση στον
Πολυτεχνείο Κρήτης Τμήμα ΗΜΜΥ Χειμερινό Εξάμηνο Intelligence Lab. Αυτόνομοι Πράκτορες. Κουσανάκης Βασίλης
 Πολυτεχνείο Κρήτης Τμήμα ΗΜΜΥ Χειμερινό Εξάμηνο 2012-2013 Intelligence Lab Αυτόνομοι Πράκτορες Κουσανάκης Βασίλης 2006030096 Αναφορά εργασίας εξαμήνου Mobile robots Rat s life Mapping Localization Είναι
Πολυτεχνείο Κρήτης Τμήμα ΗΜΜΥ Χειμερινό Εξάμηνο 2012-2013 Intelligence Lab Αυτόνομοι Πράκτορες Κουσανάκης Βασίλης 2006030096 Αναφορά εργασίας εξαμήνου Mobile robots Rat s life Mapping Localization Είναι
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΜΕ ΕΦΑΡΜΟΓΕΣ ΣΤΗ ΒΙΟΙΑΤΡΙΚΗ Συμπίεση δεδομένων ως εφαρμογή της SVD παραγοντοποίησης πίνακα Αναστασία-Θεοδώρα Ταμπούκου ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ
ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΣΧΟΛΗ ΘΕΤΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΤΜΗΜΑ ΠΛΗΡΟΦΟΡΙΚΗΣ ΜΕ ΕΦΑΡΜΟΓΕΣ ΣΤΗ ΒΙΟΙΑΤΡΙΚΗ Συμπίεση δεδομένων ως εφαρμογή της SVD παραγοντοποίησης πίνακα Αναστασία-Θεοδώρα Ταμπούκου ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ
Χωρικές Περιγραφές και Μετασχηµατισµοί
 Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
Χωρικές Περιγραφές και Μετασχηµατισµοί Νίκος Βλάσσης Τµήµα Μηχανικών Παραγωγής και ιοίκησης Πολυτεχνείο Κρητης Ροµποτική, 9ο εξάµηνο ΜΠ, 2007 Ροµπότ SCR 1 Περιεχόµενα Στοιχεία γραµµικής άλγεβρας Χωρικές
Αριθμητική Ανάλυση και Εφαρμογές
 Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Αριθμητική Ολοκλήρωση Εισαγωγή Έστω ότι η f είναι μία φραγμένη συνάρτηση στο πεπερασμένο
Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Αριθμητική Ολοκλήρωση Εισαγωγή Έστω ότι η f είναι μία φραγμένη συνάρτηση στο πεπερασμένο
Kεφάλαιο 4. Συστήματα διαφορικών εξισώσεων. F : : F = F r, όπου r xy
 4 Εισαγωγή Kεφάλαιο 4 Συστήματα διαφορικών εξισώσεων Εστω διανυσματικό πεδίο F : : F = Fr, όπου r x, και είναι η ταχύτητα στο σημείο πχ ενός ρευστού στο επίπεδο Εστω ότι ψάχνουμε τις τροχιές κίνησης των
4 Εισαγωγή Kεφάλαιο 4 Συστήματα διαφορικών εξισώσεων Εστω διανυσματικό πεδίο F : : F = Fr, όπου r x, και είναι η ταχύτητα στο σημείο πχ ενός ρευστού στο επίπεδο Εστω ότι ψάχνουμε τις τροχιές κίνησης των
Κυκλώματα με ημιτονοειδή διέγερση
 Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
Κυκλώματα με ημιτονοειδή διέγερση Κυκλώματα με ημιτονοειδή διέγερση ονομάζονται εκείνα στα οποία επιβάλλεται τάση της μορφής: = ( ω ϕ ) vt V sin t όπου: V το πλάτος (στιγμιαία μέγιστη τιμή) της τάσης ω
ΦΥΕ 14 Διανύσματα. 1 Περιγραφή διανυσμάτων στο χώρο Γεωμετρική περιγραφή: Τα διανύσματα περιγράφονται σαν προσανατολισμένα ευθύγραμμα
 ΦΥΕ 4 Διανύσματα Περιγραφή διανυσμάτων στο χώρο Γεωμετρική περιγραφή: Τα διανύσματα περιγράφονται σαν προσανατολισμένα ευθύγραμμα τμήματα Δύο διανύσματα θα θεωρούμε ότι είναι ίσα, εάν έχουν το ίδιο μήκος
ΦΥΕ 4 Διανύσματα Περιγραφή διανυσμάτων στο χώρο Γεωμετρική περιγραφή: Τα διανύσματα περιγράφονται σαν προσανατολισμένα ευθύγραμμα τμήματα Δύο διανύσματα θα θεωρούμε ότι είναι ίσα, εάν έχουν το ίδιο μήκος
Αριθμητική Ανάλυση και Εφαρμογές
 Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 2017-2018 Συστήματα Γραμμικών Εξισώσεων Εισαγωγή Σύστημα γραμμικών εξισώσεων a x a x a x b 11
Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 2017-2018 Συστήματα Γραμμικών Εξισώσεων Εισαγωγή Σύστημα γραμμικών εξισώσεων a x a x a x b 11
Μηχανική Πετρωμάτων Τάσεις
 Μηχανική Πετρωμάτων Τάσεις Δρ Παντελής Λιόλιος Σχολή Μηχανικών Ορυκτών Πόρων Πολυτεχνείο Κρήτης http://minelabmredtucgr Τελευταία ενημέρωση: 28 Φεβρουαρίου 2017 Δρ Παντελής Λιόλιος (ΠΚ) Τάσεις 28 Φεβρουαρίου
Μηχανική Πετρωμάτων Τάσεις Δρ Παντελής Λιόλιος Σχολή Μηχανικών Ορυκτών Πόρων Πολυτεχνείο Κρήτης http://minelabmredtucgr Τελευταία ενημέρωση: 28 Φεβρουαρίου 2017 Δρ Παντελής Λιόλιος (ΠΚ) Τάσεις 28 Φεβρουαρίου
Η ΜΕΘΟΔΟΣ PCA (Principle Component Analysis)
") Η ΜΕΘΟΔΟΣ PCA (Principle Component Analysis) Η μέθοδος PCA (Ανάλυση Κύριων Συνιστωσών), αποτελεί μία γραμμική μέθοδο συμπίεσης Δεδομένων η οποία συνίσταται από τον επαναπροσδιορισμό των συντεταγμένων ενός
Η ΜΕΘΟΔΟΣ PCA (Principle Component Analysis) Η μέθοδος PCA (Ανάλυση Κύριων Συνιστωσών), αποτελεί μία γραμμική μέθοδο συμπίεσης Δεδομένων η οποία συνίσταται από τον επαναπροσδιορισμό των συντεταγμένων ενός
Να υπολογίζουμε τους τριγωνομετρικούς αριθμούς οξείας γωνίας. Τη γωνία σε κανονική θέση και τους τριγωνομετρικούς αριθμούς γωνίας σε κανονική θέση.
 Ενότητα 4 Τριγωνομετρία Στην ενότητα αυτή θα μάθουμε: Να υπολογίζουμε τους τριγωνομετρικούς αριθμούς οξείας γωνίας. Τη γωνία σε κανονική θέση και τους τριγωνομετρικούς αριθμούς γωνίας σε κανονική θέση.
Ενότητα 4 Τριγωνομετρία Στην ενότητα αυτή θα μάθουμε: Να υπολογίζουμε τους τριγωνομετρικούς αριθμούς οξείας γωνίας. Τη γωνία σε κανονική θέση και τους τριγωνομετρικούς αριθμούς γωνίας σε κανονική θέση.
Αριθμητική Ανάλυση και Εφαρμογές
 Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Αριθμητική Παραγώγιση Εισαγωγή Ορισμός 7. Αν y f x είναι μια συνάρτηση ορισμένη σε ένα διάστημα
Αριθμητική Ανάλυση και Εφαρμογές Διδάσκων: Δημήτριος Ι. Φωτιάδης Τμήμα Μηχανικών Επιστήμης Υλικών Ιωάννινα 07-08 Αριθμητική Παραγώγιση Εισαγωγή Ορισμός 7. Αν y f x είναι μια συνάρτηση ορισμένη σε ένα διάστημα
Στοιχεία εισηγητή Ημερομηνία: 10/10/2017
 Θέμα μεταπτυχιακής διατριβής: Λογισμικά μελέτης και σχεδίασης ρομποτικών συστημάτων - συγκρτική μελέτη και εφαρμογές. 1) Μελέτη των δημοφιλών λογισμικών σχεδίασης ρομποτικών συστημάτων VREP και ROS. 2)
Θέμα μεταπτυχιακής διατριβής: Λογισμικά μελέτης και σχεδίασης ρομποτικών συστημάτων - συγκρτική μελέτη και εφαρμογές. 1) Μελέτη των δημοφιλών λογισμικών σχεδίασης ρομποτικών συστημάτων VREP και ROS. 2)
Κεφάλαιο 5 Γραμμικοί Μετασχηματισμοί
 Κεφάλαιο 5 Γραμμικοί Μετασχηματισμοί 5 Γενικά Γραμμικοί Μετασχηματισμοί Μία σχέση μεταξύ των στοιχείων δύο συνόλων Α,Β αντιστοιχίζει στοιχεία του Α με στοιχεία του Β άλλου μέσω ενός κανόνα που μπορεί να
Κεφάλαιο 5 Γραμμικοί Μετασχηματισμοί 5 Γενικά Γραμμικοί Μετασχηματισμοί Μία σχέση μεταξύ των στοιχείων δύο συνόλων Α,Β αντιστοιχίζει στοιχεία του Α με στοιχεία του Β άλλου μέσω ενός κανόνα που μπορεί να
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔ ΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ Μεθοδολογία Κλεομένης Γ. Τσιγάνης Λέκτορας ΑΠΘ Πρόχειρες
ισδιάστατοι μετασχηματισμοί ΚΕΦΑΛΑΙΟ 4: ισδιάστατοι γεωμετρικοί μετασχηματισμοί
 ΚΕΦΑΛΑΙΟ 4: ισδιάστατοι γεωμετρικοί μετασχηματισμοί Πολλά προβλήματα λύνονται μέσω δισδιάστατων απεικονίσεων ενός μοντέλου. Μεταξύ αυτών και τα προβλήματα κίνησης, όπως η κίνηση ενός συρόμενου μηχανισμού.
ΚΕΦΑΛΑΙΟ 4: ισδιάστατοι γεωμετρικοί μετασχηματισμοί Πολλά προβλήματα λύνονται μέσω δισδιάστατων απεικονίσεων ενός μοντέλου. Μεταξύ αυτών και τα προβλήματα κίνησης, όπως η κίνηση ενός συρόμενου μηχανισμού.
Ε π ι μ έ λ ε ι α Κ Ο Λ Λ Α Σ Α Ν Τ Ω Ν Η Σ
 Ε π ι μ έ λ ε ι α Κ Ο Λ Λ Α Σ Α Ν Τ Ω Ν Η Σ 1 Συναρτήσεις Όταν αναφερόμαστε σε μια συνάρτηση, ουσιαστικά αναφερόμαστε σε μια σχέση ή εξάρτηση. Στα μαθηματικά που θα μας απασχολήσουν, με απλά λόγια, η σχέση
Ε π ι μ έ λ ε ι α Κ Ο Λ Λ Α Σ Α Ν Τ Ω Ν Η Σ 1 Συναρτήσεις Όταν αναφερόμαστε σε μια συνάρτηση, ουσιαστικά αναφερόμαστε σε μια σχέση ή εξάρτηση. Στα μαθηματικά που θα μας απασχολήσουν, με απλά λόγια, η σχέση
Συστήματα συντεταγμένων
 Κεφάλαιο. Για να δημιουργήσουμε τρισδιάστατα αντικείμενα, που μπορούν να παρασταθούν στην οθόνη του υπολογιστή ως ένα σύνολο από γραμμές, επίπεδες πολυγωνικές επιφάνειες ή ακόμη και από ένα συνδυασμό από
Κεφάλαιο. Για να δημιουργήσουμε τρισδιάστατα αντικείμενα, που μπορούν να παρασταθούν στην οθόνη του υπολογιστή ως ένα σύνολο από γραμμές, επίπεδες πολυγωνικές επιφάνειες ή ακόμη και από ένα συνδυασμό από
Τι είναι βαθμωτό μέγεθος? Ένα μέγεθος που περιγράφεται μόνο με έναν αριθμό (π.χ. πίεση)
") TETY Εφαρμοσμένα Μαθηματικά Ενότητα ΙΙ: Γραμμική Άλγεβρα Ύλη: Διανυσματικοί χώροι και διανύσματα, μετασχηματισμοί διανυσμάτων, τελεστές και πίνακες, ιδιοδιανύσματα και ιδιοτιμές πινάκων, επίλυση γραμμικών
TETY Εφαρμοσμένα Μαθηματικά Ενότητα ΙΙ: Γραμμική Άλγεβρα Ύλη: Διανυσματικοί χώροι και διανύσματα, μετασχηματισμοί διανυσμάτων, τελεστές και πίνακες, ιδιοδιανύσματα και ιδιοτιμές πινάκων, επίλυση γραμμικών
ΚΕΦ.6:ΤΕΤΡΑΓΩΝΙΚΕΣ ΜΟΡΦΕΣ. ΣΥΜΜΕΤΡΙΚΟΙ ΠΙΝΑΚΕΣ
 ΚΕΦ:ΤΕΤΡΑΓΩΝΙΚΕΣ ΜΟΡΦΕΣ ΣΥΜΜΕΤΡΙΚΟΙ ΠΙΝΑΚΕΣ Τετραγωνικές μορφές: Συναρτήσεις με τύπο Q ν α ι j j, j [ ] ν α α ν αν α νν ν Τ Χ ΑΧ Για παράδειγμα εάν v Q α + α + α + α α + α + α + α δηλ a a a a α + α + α
ΚΕΦ:ΤΕΤΡΑΓΩΝΙΚΕΣ ΜΟΡΦΕΣ ΣΥΜΜΕΤΡΙΚΟΙ ΠΙΝΑΚΕΣ Τετραγωνικές μορφές: Συναρτήσεις με τύπο Q ν α ι j j, j [ ] ν α α ν αν α νν ν Τ Χ ΑΧ Για παράδειγμα εάν v Q α + α + α + α α + α + α + α δηλ a a a a α + α + α
ΒΟΗΘΗΤΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΣΤΑ ΓΕΝΙΚΑ ΜΑΘΗΜΑΤΙΚΑ
 ΤΜΗΜΑ ΔΙΕΘΝΟΥΣ ΕΜΠΟΡΙΟΥ ΒΟΗΘΗΤΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΣΤΑ ΓΕΝΙΚΑ ΜΑΘΗΜΑΤΙΚΑ ΚΕΦΑΛΑΙΑ: ) ΠΙΝΑΚΕΣ ) ΟΡΙΖΟΥΣΕΣ ) ΓΡΑΜΜΙΚΑ ΣΥΣΤΗΜΑΤΑ 4) ΠΑΡΑΓΩΓΟΙ ΜΑΡΙΑ ΡΟΥΣΟΥΛΗ ΚΕΦΑΛΑΙΟ ΠΙΝΑΚEΣ ΠΡΑΓΜΑΤΙΚΩΝ ΑΡΙΘΜΩΝ ΟΡΙΣΜΟΣ Πίνακας
ΤΜΗΜΑ ΔΙΕΘΝΟΥΣ ΕΜΠΟΡΙΟΥ ΒΟΗΘΗΤΙΚΕΣ ΣΗΜΕΙΩΣΕΙΣ ΣΤΑ ΓΕΝΙΚΑ ΜΑΘΗΜΑΤΙΚΑ ΚΕΦΑΛΑΙΑ: ) ΠΙΝΑΚΕΣ ) ΟΡΙΖΟΥΣΕΣ ) ΓΡΑΜΜΙΚΑ ΣΥΣΤΗΜΑΤΑ 4) ΠΑΡΑΓΩΓΟΙ ΜΑΡΙΑ ΡΟΥΣΟΥΛΗ ΚΕΦΑΛΑΙΟ ΠΙΝΑΚEΣ ΠΡΑΓΜΑΤΙΚΩΝ ΑΡΙΘΜΩΝ ΟΡΙΣΜΟΣ Πίνακας
ΒΕΛΤΙΣΤΟΣ ΓΕΩΜΕΤΡΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΧΩΡΙΚΟΥ ΒΡΑΧΙΟΝΑ RRR ΜΕ ΧΡΗΣΗ ΥΒΡΙΔΙΚΟΥ ΑΛΓΟΡΙΘΜΟΥ
 ΒΕΛΤΙΣΤΟΣ ΓΕΩΜΕΤΡΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΧΩΡΙΚΟΥ ΒΡΑΧΙΟΝΑ RRR ΜΕ ΧΡΗΣΗ ΥΒΡΙΔΙΚΟΥ ΑΛΓΟΡΙΘΜΟΥ Δ. Σαγρής, Σ. Μήτση, Κ.-Δ. Μπουζάκης, Γκ. Μανσούρ Εργαστήριο Εργαλειομηχανών και Διαμορφωτικής Μηχανολογίας, Τμήμα Μηχανολόγων
ΒΕΛΤΙΣΤΟΣ ΓΕΩΜΕΤΡΙΚΟΣ ΣΧΕΔΙΑΣΜΟΣ ΧΩΡΙΚΟΥ ΒΡΑΧΙΟΝΑ RRR ΜΕ ΧΡΗΣΗ ΥΒΡΙΔΙΚΟΥ ΑΛΓΟΡΙΘΜΟΥ Δ. Σαγρής, Σ. Μήτση, Κ.-Δ. Μπουζάκης, Γκ. Μανσούρ Εργαστήριο Εργαλειομηχανών και Διαμορφωτικής Μηχανολογίας, Τμήμα Μηχανολόγων
Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση 8/6/2017 Διδάσκων: Ι. Λυχναρόπουλος
 Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Άσκηση (Μονάδες.5) Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση 8/6/07 Διδάσκων: Ι. Λυχναρόπουλος Προσδιορίστε το c R ώστε το διάνυσμα (,, 6 ) να ανήκει στο
Τμήμα Μηχανολόγων Μηχανικών Πανεπιστήμιο Θεσσαλίας Άσκηση (Μονάδες.5) Εφαρμοσμένα Μαθηματικά ΙΙ Τελική Εξέταση 8/6/07 Διδάσκων: Ι. Λυχναρόπουλος Προσδιορίστε το c R ώστε το διάνυσμα (,, 6 ) να ανήκει στο
ΒΙΟΜΗΧΑΝΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ
 ΒΙΟΜΗΧΑΝΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ Συµπληρωµατικές Σηµειώσεις Προχωρηµένο Επίπεδο Επεξεργασίας Εικόνας Σύνθεση Οπτικού Μωσαϊκού ρ. Γ. Χ. Καρράς Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Μηχανολόγων Μηχανικών Τοµέας Μηχανολογικών
ΒΙΟΜΗΧΑΝΙΚΑ ΗΛΕΚΤΡΟΝΙΚΑ Συµπληρωµατικές Σηµειώσεις Προχωρηµένο Επίπεδο Επεξεργασίας Εικόνας Σύνθεση Οπτικού Μωσαϊκού ρ. Γ. Χ. Καρράς Εθνικό Μετσόβιο Πολυτεχνείο Σχολή Μηχανολόγων Μηχανικών Τοµέας Μηχανολογικών
Γεωμετρικοί μετασχηματιμοί εικόνας
 Γεωμετρικοί μετασχηματιμοί εικόνας Μάθημα: Υπολογιστική Οραση 1 Γεωμετρικοί Μετασχηματισμοί Ορισμός σημείου στονευκλείδιοχώρο: p=[x p,y p,z p ] T, όπου x p, y p, z p πραγματικοί αριθμοί. ΕστωΕ 3 τοσύνολοτωνp.
Γεωμετρικοί μετασχηματιμοί εικόνας Μάθημα: Υπολογιστική Οραση 1 Γεωμετρικοί Μετασχηματισμοί Ορισμός σημείου στονευκλείδιοχώρο: p=[x p,y p,z p ] T, όπου x p, y p, z p πραγματικοί αριθμοί. ΕστωΕ 3 τοσύνολοτωνp.
ΤΟΠΟΓΡΑΦΙΚΑ ΔΙΚΤΥΑ ΚΑΙ ΥΠΟΛΟΓΙΣΜΟΙ ΑΝΑΣΚΟΠΗΣΗ ΘΕΩΡΙΑΣ ΣΥΝΟΡΘΩΣΕΩΝ
 ΤΟΠΟΓΡΑΦΙΚΑ ΔΙΚΤΥΑ ΚΑΙ ΥΠΟΛΟΓΙΣΜΟΙ ΑΝΑΣΚΟΠΗΣΗ ΘΕΩΡΙΑΣ ΣΥΝΟΡΘΩΣΕΩΝ Βασίλης Δ. Ανδριτσάνος Δρ. Αγρονόμος - Τοπογράφος Μηχανικός ΑΠΘ Επίκουρος Καθηγητής ΤΕΙ Αθήνας 3ο εξάμηνο http://eclass.teiath.gr Παρουσιάσεις,
ΤΟΠΟΓΡΑΦΙΚΑ ΔΙΚΤΥΑ ΚΑΙ ΥΠΟΛΟΓΙΣΜΟΙ ΑΝΑΣΚΟΠΗΣΗ ΘΕΩΡΙΑΣ ΣΥΝΟΡΘΩΣΕΩΝ Βασίλης Δ. Ανδριτσάνος Δρ. Αγρονόμος - Τοπογράφος Μηχανικός ΑΠΘ Επίκουρος Καθηγητής ΤΕΙ Αθήνας 3ο εξάμηνο http://eclass.teiath.gr Παρουσιάσεις,
8.1 Διαγωνοποίηση πίνακα
 Κεφάλαιο 8 Κανονικές μορφές από 6 Κεφάλαιο 8 Κ Α Ν Ο Ν Ι Κ Ε Σ Μ Ο Ρ Φ Ε Σ 8. Διαγωνοποίηση πίνακα Ορισμός 8.α Ένας πίνακας M n ( ) oνομάζεται διαγωνοποιήσιμος στο αν υπάρχει αντιστρέψιμος πίνακας P M
Κεφάλαιο 8 Κανονικές μορφές από 6 Κεφάλαιο 8 Κ Α Ν Ο Ν Ι Κ Ε Σ Μ Ο Ρ Φ Ε Σ 8. Διαγωνοποίηση πίνακα Ορισμός 8.α Ένας πίνακας M n ( ) oνομάζεται διαγωνοποιήσιμος στο αν υπάρχει αντιστρέψιμος πίνακας P M
Πιο συγκεκριμένα, η χρήση του MATLAB προσφέρει τα ακόλουθα πλεονεκτήματα.
 i Π Ρ Ο Λ Ο Γ Ο Σ Το βιβλίο αυτό αποτελεί μια εισαγωγή στα βασικά προβλήματα των αριθμητικών μεθόδων της υπολογιστικής γραμμικής άλγεβρας (computational linear algebra) και της αριθμητικής ανάλυσης (numerical
i Π Ρ Ο Λ Ο Γ Ο Σ Το βιβλίο αυτό αποτελεί μια εισαγωγή στα βασικά προβλήματα των αριθμητικών μεθόδων της υπολογιστικής γραμμικής άλγεβρας (computational linear algebra) και της αριθμητικής ανάλυσης (numerical
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ
 ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) Ενδεικτικές Λύσεις ΕΡΓΑΣΙΑ η Ηµεροµηνία Αποστολής στον Φοιτητή: Ιανουαρίου 6 Ηµεροµηνία Παράδοσης της Εργασίας από
ΕΛΛΗΝΙΚΟ ΑΝΟΙΚΤΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΡΟΓΡΑΜΜΑ ΣΠΟΥ ΩΝ ΣΤΗΝ ΠΛΗΡΟΦΟΡΙΚΗ ΜΑΘΗΜΑΤΙΚΑ Ι (ΘΕ ΠΛΗ ) Ενδεικτικές Λύσεις ΕΡΓΑΣΙΑ η Ηµεροµηνία Αποστολής στον Φοιτητή: Ιανουαρίου 6 Ηµεροµηνία Παράδοσης της Εργασίας από
Γραφικά Υπολογιστών: Προοπτικές Προβολές (Perspective Projections)
") 1 ΤΕΙ Θεσσαλονίκης Τμήμα Πληροφορικής Γραφικά Υπολογιστών: Προοπτικές Προβολές (Perspective Projections) Πασχάλης Ράπτης http://aetos.it.teithe.gr/~praptis praptis@it.teithe.gr 2 Contents Μια ματιά για
1 ΤΕΙ Θεσσαλονίκης Τμήμα Πληροφορικής Γραφικά Υπολογιστών: Προοπτικές Προβολές (Perspective Projections) Πασχάλης Ράπτης http://aetos.it.teithe.gr/~praptis praptis@it.teithe.gr 2 Contents Μια ματιά για
= 7. Στο σημείο αυτό θα υπενθυμίσουμε κάποιες βασικές ιδιότητες του μετασχηματισμού Laplace, δηλαδή τις
 1. Εισαγωγή Δίνεται η συνάρτηση μεταφοράς = = 1 + 6 + 11 + 6 = + 6 + 11 + 6 =. 2 Στο σημείο αυτό θα υπενθυμίσουμε κάποιες βασικές ιδιότητες του μετασχηματισμού Laplace, δηλαδή τις L = 0 # και L $ % &'
1. Εισαγωγή Δίνεται η συνάρτηση μεταφοράς = = 1 + 6 + 11 + 6 = + 6 + 11 + 6 =. 2 Στο σημείο αυτό θα υπενθυμίσουμε κάποιες βασικές ιδιότητες του μετασχηματισμού Laplace, δηλαδή τις L = 0 # και L $ % &'
Υπολογισμός του πίνακα A n, n Z Νίκος Χαλιδιάς Τμήμα Στατιστικής και Αναλογιστικών - Χρηματοοικονομικών Μαθηματικών Πανεπιστήμιο Αιγαίου
 Υπολογισμός του πίνακα A n, n Z Νίκος Χαλιδιάς Τμήμα Στατιστικής και Αναλογιστικών - Χρηματοοικονομικών Μαθηματικών Πανεπιστήμιο Αιγαίου Εστω πίνακας αριθμών A m m και έστω ότι θέλουμε να υπολογίσουμε
Υπολογισμός του πίνακα A n, n Z Νίκος Χαλιδιάς Τμήμα Στατιστικής και Αναλογιστικών - Χρηματοοικονομικών Μαθηματικών Πανεπιστήμιο Αιγαίου Εστω πίνακας αριθμών A m m και έστω ότι θέλουμε να υπολογίσουμε
Φίλη μαθήτρια, φίλε μαθητή,
 Φίλη μαθήτρια φίλε μαθητή Η εργασία αυτή έγινε με σκοπό να συμβάλει στην κατανόηση στην εμπέδωση και στην εμβάθυνση των μαθηματικών εννοιών που αναπτύσσονται στην Άλγεβρα της Β Λυκείου. Η ύλη είναι γραμμένη
Φίλη μαθήτρια φίλε μαθητή Η εργασία αυτή έγινε με σκοπό να συμβάλει στην κατανόηση στην εμπέδωση και στην εμβάθυνση των μαθηματικών εννοιών που αναπτύσσονται στην Άλγεβρα της Β Λυκείου. Η ύλη είναι γραμμένη
3: A convolution-pooling layer in PS-CNN 1: Partially Shared Deep Neural Network 2.2 Partially Shared Convolutional Neural Network 2: A hidden layer o
 Sound Source Identification based on Deep Learning with Partially-Shared Architecture 1 2 1 1,3 Takayuki MORITO 1, Osamu SUGIYAMA 2, Ryosuke KOJIMA 1, Kazuhiro NAKADAI 1,3 1 2 ( ) 3 Tokyo Institute of
Sound Source Identification based on Deep Learning with Partially-Shared Architecture 1 2 1 1,3 Takayuki MORITO 1, Osamu SUGIYAMA 2, Ryosuke KOJIMA 1, Kazuhiro NAKADAI 1,3 1 2 ( ) 3 Tokyo Institute of
Σήματα και Συστήματα. Διάλεξη 1: Σήματα Συνεχούς Χρόνου. Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής
 Σήματα και Συστήματα Διάλεξη 1: Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Εισαγωγή στα Σήματα 1. Σκοποί της Θεωρίας Σημάτων 2. Κατηγορίες Σημάτων 3. Χαρακτηριστικές Παράμετροι
Σήματα και Συστήματα Διάλεξη 1: Σήματα Συνεχούς Χρόνου Δρ. Μιχάλης Παρασκευάς Επίκουρος Καθηγητής 1 Εισαγωγή στα Σήματα 1. Σκοποί της Θεωρίας Σημάτων 2. Κατηγορίες Σημάτων 3. Χαρακτηριστικές Παράμετροι
Εφαρμοσμένα Μαθηματικά ΙΙ Εξέταση Σεπτεμβρίου Ι. Λυχναρόπουλος
 9/8/6 Εφαρμοσμένα Μαθηματικά ΙΙ Εξέταση Σεπτεμβρίου Ι. Λυχναρόπουλος Άσκηση (Μονάδες.5) Να υπολογισθούν τα ακρότατα της συνάρτησης: y y y y 3 (, ) 3 3 3 Πεδίο ορισμού της συνάρτησης είναι το Υπολογίζουμε
9/8/6 Εφαρμοσμένα Μαθηματικά ΙΙ Εξέταση Σεπτεμβρίου Ι. Λυχναρόπουλος Άσκηση (Μονάδες.5) Να υπολογισθούν τα ακρότατα της συνάρτησης: y y y y 3 (, ) 3 3 3 Πεδίο ορισμού της συνάρτησης είναι το Υπολογίζουμε
Στ Τάξη. Α/Α Μαθηματικό περιεχόμενο Δείκτες Επιτυχίας Ώρες Διδ. 1 ENOTHTA 1
 Ενδεικτική Οργάνωση Ενοτήτων Στ Τάξη Α/Α Μαθηματικό περιεχόμενο Δείκτες Επιτυχίας Ώρες Διδ. 1 ENOTHTA 1 15 Αρ3.1 Απαγγέλουν, διαβάζουν, γράφουν και αναγνωρίζουν ποσότητες αριθμών Επανάληψη μέχρι το 1 000
Ενδεικτική Οργάνωση Ενοτήτων Στ Τάξη Α/Α Μαθηματικό περιεχόμενο Δείκτες Επιτυχίας Ώρες Διδ. 1 ENOTHTA 1 15 Αρ3.1 Απαγγέλουν, διαβάζουν, γράφουν και αναγνωρίζουν ποσότητες αριθμών Επανάληψη μέχρι το 1 000
II. Συναρτήσεις. math-gr
 II Συναρτήσεις Παντελής Μπουμπούλης, MSc, PhD σελ blogspotcom, bouboulismyschgr ΜΕΡΟΣ 1 ΣΥΝΑΡΤΗΣΕΙΣ Α Βασικές Έννοιες Ορισμός: Έστω Α ένα υποσύνολο του συνόλου των πραγματικών αριθμών R Ονομάζουμε πραγματική
II Συναρτήσεις Παντελής Μπουμπούλης, MSc, PhD σελ blogspotcom, bouboulismyschgr ΜΕΡΟΣ 1 ΣΥΝΑΡΤΗΣΕΙΣ Α Βασικές Έννοιες Ορισμός: Έστω Α ένα υποσύνολο του συνόλου των πραγματικών αριθμών R Ονομάζουμε πραγματική
ΤΕΧΝΙΚΗ ΜΗΧΑΝΙΚΗ Ι ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ- ΥΝΑΜΕΙΣ ΣΤΟ ΕΠΙΠΕ Ο ΚΑΙ ΣΤΟ
 ΤΕΧΝΙΚΗ ΜΗΧΑΝΙΚΗ Ι ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ- ΥΝΑΜΕΙΣ ΣΤΟ ΕΠΙΠΕ Ο ΚΑΙ ΣΤΟ ΧΩΡΟ Στη συνέχεια θα δοθούν ορισμένες βασικές έννοιες μαθηματικών και φυσικήςμηχανικής που είναι απαραίτητες για την κατανόηση του μαθήματος
ΤΕΧΝΙΚΗ ΜΗΧΑΝΙΚΗ Ι ΕΙΣΑΓΩΓΙΚΕΣ ΕΝΝΟΙΕΣ- ΥΝΑΜΕΙΣ ΣΤΟ ΕΠΙΠΕ Ο ΚΑΙ ΣΤΟ ΧΩΡΟ Στη συνέχεια θα δοθούν ορισμένες βασικές έννοιες μαθηματικών και φυσικήςμηχανικής που είναι απαραίτητες για την κατανόηση του μαθήματος
Θέματα ενδοσχολικών εξετάσεων Άλγεβρας Α Λυκείου Σχ. έτος , Ν. Δωδεκανήσου ΘΕΜΑΤΑ ΕΝΔΟΣΧΟΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΤΑΞΗ: Α ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΑΛΓΕΒΡΑ
 Θέματα ενδοσχολικών εξετάσεων Άλγεβρας Α Λυκείου Σχ. έτος 013-014, Ν. Δωδεκανήσου ΘΕΜΑΤΑ ΕΝΔΟΣΧΟΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΤΑΞΗ: Α ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΑΛΓΕΒΡΑ ΣΧΟΛΙΚΟ ΕΤΟΣ: 013-014 Επιμέλεια: Καραγιάννης Ιωάννης Σχολικός
Θέματα ενδοσχολικών εξετάσεων Άλγεβρας Α Λυκείου Σχ. έτος 013-014, Ν. Δωδεκανήσου ΘΕΜΑΤΑ ΕΝΔΟΣΧΟΛΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΤΑΞΗ: Α ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΑΛΓΕΒΡΑ ΣΧΟΛΙΚΟ ΕΤΟΣ: 013-014 Επιμέλεια: Καραγιάννης Ιωάννης Σχολικός
Επίλυση Γραµµικών Συστηµάτων
 Κεφάλαιο 3 Επίλυση Γραµµικών Συστηµάτων 31 Εισαγωγή Αριθµητική λύση γενικών γραµµικών συστηµάτων n n A n n x n 1 b n 1, όπου a 11 a 12 a 1n a 21 a 22 a 2n A [a i j, x a n1 a n2 a nn x n, b b 1 b 2 b n
Κεφάλαιο 3 Επίλυση Γραµµικών Συστηµάτων 31 Εισαγωγή Αριθµητική λύση γενικών γραµµικών συστηµάτων n n A n n x n 1 b n 1, όπου a 11 a 12 a 1n a 21 a 22 a 2n A [a i j, x a n1 a n2 a nn x n, b b 1 b 2 b n
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - ΣΥΝΟΨΗ
 ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
ΕΙΣΑΓΩΓΗ ΣΤΗ ΡΟΜΠΟΤΙΚΗ - Π. ΑΣΒΕΣΤΑΣ E MAIL: pasv@uniwa.gr Εφαρμογές ρομποτικής στην Ιατρική Κλασσική χειρουργική Ορθοπεδικές επεμβάσεις Νευροχειρουργική Ακτινοθεραπεία Αποκατάσταση φυσιοθεραπεία 2 Βασικοί
Sˆy. Η βάση για την οποία συζητάμε απαρτίζεται από τα ανύσματα = (1) ˆ 2 ± =± ± Άσκηση 20. (βοήθημα θεωρίας)
 ˆ 2 ± =± ± Άσκηση 20. (βοήθημα θεωρίας)") Άσκηση 0. (βοήθημα θεωρίας) Έστω + και η βάση που συγκροτούν οι (κοινές) ιδιοκαταστάσεις των τελεστών ˆ S και Sˆz ενός σωματίου με spin 1/. Να βρείτε την αναπαράσταση των τελεστών S ˆx, Sˆ και Sˆz στη
Άσκηση 0. (βοήθημα θεωρίας) Έστω + και η βάση που συγκροτούν οι (κοινές) ιδιοκαταστάσεις των τελεστών ˆ S και Sˆz ενός σωματίου με spin 1/. Να βρείτε την αναπαράσταση των τελεστών S ˆx, Sˆ και Sˆz στη
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα CAD / CAM. Ενότητα # 6: Γραφικά
 ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα CAD / CAM Ενότητα # 6: Γραφικά Δημήτριος Τσελές Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα CAD / CAM Ενότητα # 6: Γραφικά Δημήτριος Τσελές Τμήμα Μηχανικών Αυτοματισμού Τ.Ε. Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται
ΚΕΦΑΛΑΙΟ 4 Ο ΣΤΟΙΧΕΙΑ ΟΛΟΚΛΗΡΩΤΙΚΟΥ ΛΟΓΙΣΜΟΥ
 ΜΕΘΟΔΟΛΟΓΙΑ & ΑΣΚΗΣΕΙΣ ΣΤΑ ΜΑΘΗΜΑΤΙΚΑ Γ ΕΠΑΛ ΚΕΦΑΛΑΙΟ Ο ΣΤΟΙΧΕΙΑ ΟΛΟΚΛΗΡΩΤΙΚΟΥ ΛΟΓΙΣΜΟΥ Επιμέλεια : Παλαιολόγου Παύλος Μαθηματικός ΣΤΟΙΧΕΙΑ ΘΕΩΡΙΑΣ : ΠΑΡΑΓΟΥΣΕΣ ΟΡΙΣΜΟΣ Έστω συνάρτηση : R, όπου Δ διάστημα
ΜΕΘΟΔΟΛΟΓΙΑ & ΑΣΚΗΣΕΙΣ ΣΤΑ ΜΑΘΗΜΑΤΙΚΑ Γ ΕΠΑΛ ΚΕΦΑΛΑΙΟ Ο ΣΤΟΙΧΕΙΑ ΟΛΟΚΛΗΡΩΤΙΚΟΥ ΛΟΓΙΣΜΟΥ Επιμέλεια : Παλαιολόγου Παύλος Μαθηματικός ΣΤΟΙΧΕΙΑ ΘΕΩΡΙΑΣ : ΠΑΡΑΓΟΥΣΕΣ ΟΡΙΣΜΟΣ Έστω συνάρτηση : R, όπου Δ διάστημα
ΓΕΩΓΡΑΦΙΚΑ ΣΥΣΤΗΜΑΤΑ ΠΛΗΡΟΦΟΡΙΩΝ-2 (ο χάρτης)
") ΓΕΩΓΡΑΦΙΚΑ ΣΥΣΤΗΜΑΤΑ ΠΛΗΡΟΦΟΡΙΩΝ-2 (ο χάρτης) Ο χάρτης ως υπόβαθρο των ΓΣΠ Tα ΓΣΠ βασίζονται στη διαχείριση πληροφοριών που έχουν άμεση σχέση με το γεωγραφικό χώρο, περιέχουν δηλαδή δεδομένα με γεωγραφική
ΓΕΩΓΡΑΦΙΚΑ ΣΥΣΤΗΜΑΤΑ ΠΛΗΡΟΦΟΡΙΩΝ-2 (ο χάρτης) Ο χάρτης ως υπόβαθρο των ΓΣΠ Tα ΓΣΠ βασίζονται στη διαχείριση πληροφοριών που έχουν άμεση σχέση με το γεωγραφικό χώρο, περιέχουν δηλαδή δεδομένα με γεωγραφική
ΜΑΘΗΜΑΤΙΚΑ Β ΓΥΜΝΑΣΙΟΥ
 ΜΑΘΗΜΑΤΙΚΑ Β ΓΥΜΝΑΣΙΟΥ Βρέντζου Τίνα Φυσικός Μεταπτυχιακός τίτλος ΜEd: «Σπουδές στην εκπαίδευση» ΚΕΦΑΛΑΙΟ 1 Ο : Εξισώσεις - Ανισώσεις 1 1.1 Η ΕΝΝΟΙΑ ΤΗΣ ΜΕΤΑΒΛΗΤΗΣ ΑΛΓΕΒΡΙΚΕΣ ΠΑΡΑΣΤΑΣΕΙΣ ΟΡΙΣΜΟΙ Μεταβλητή
ΜΑΘΗΜΑΤΙΚΑ Β ΓΥΜΝΑΣΙΟΥ Βρέντζου Τίνα Φυσικός Μεταπτυχιακός τίτλος ΜEd: «Σπουδές στην εκπαίδευση» ΚΕΦΑΛΑΙΟ 1 Ο : Εξισώσεις - Ανισώσεις 1 1.1 Η ΕΝΝΟΙΑ ΤΗΣ ΜΕΤΑΒΛΗΤΗΣ ΑΛΓΕΒΡΙΚΕΣ ΠΑΡΑΣΤΑΣΕΙΣ ΟΡΙΣΜΟΙ Μεταβλητή
μαγνητικό πεδίο παράλληλο στον άξονα x
 Σπιν μέσα σε ομογενές, χρονικά ανεξάρτητο μαγνητικό πεδίο παράλληλο στον άξονα ) Ηλεκτρόνιο βρίσκεται μέσα σε ομογενές, χρονικά ανεξάρτητο μαγνητικό πεδίο με κατεύθυνση στα θετικά του άξονα, δηλαδή e,
Σπιν μέσα σε ομογενές, χρονικά ανεξάρτητο μαγνητικό πεδίο παράλληλο στον άξονα ) Ηλεκτρόνιο βρίσκεται μέσα σε ομογενές, χρονικά ανεξάρτητο μαγνητικό πεδίο με κατεύθυνση στα θετικά του άξονα, δηλαδή e,
ΘΕΩΡΗΤΙΚΗ ΜΗΧΑΝΙΚΗ ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΤΜΗΜΑ ΦΥΣΙΚΗΣ ΤΟΜΕΑΣ ΑΣΤΡΟΝΟΜΙΑΣ ΑΣΤΡΟΦΥΣΙΚΗΣ ΚΑΙ ΜΗΧΑΝΙΚΗΣ ΣΠΟΥΔΑΣΤΗΡΙΟ ΜΗΧΑΝΙΚΗΣ ΑΣΚΗΣΕΙΣ ΑΝΑΛΥΤΙΚΗΣ ΔΥΝΑΜΙΚΗΣ ( Μεθοδολογία- Παραδείγματα ) Κλεομένης Γ. Τσιγάνης
2x 1 + x 2 x 3 + x 4 = 1. 3x 1 x 2 x 3 +2x 4 = 3 x 1 +2x 2 +6x 3 x 4 = 4
 Παράδειγμα 2x 1 +2x 2 +0x 3 +6x 4 = 8 2x 1 + x 2 x 3 + x 4 = 1 3x 1 x 2 x 3 +2x 4 = 3 x 1 +2x 2 +6x 3 x 4 = 4 Επαυξημένος πίνακας: 2 2 0 6 8 2 1 1 1 1 Ã = 3 1 1 2 3 1 2 6 1 4 Γενικό σύστημα a 11 x 1 +a
Παράδειγμα 2x 1 +2x 2 +0x 3 +6x 4 = 8 2x 1 + x 2 x 3 + x 4 = 1 3x 1 x 2 x 3 +2x 4 = 3 x 1 +2x 2 +6x 3 x 4 = 4 Επαυξημένος πίνακας: 2 2 0 6 8 2 1 1 1 1 Ã = 3 1 1 2 3 1 2 6 1 4 Γενικό σύστημα a 11 x 1 +a
Παραδείγματα Απαλοιφή Gauss Απαλοιφή Gauss-Jordan Παραγοντοποίηση LU, LDU
 Παραδείγματα Απαλοιφή Gauss Απαλοιφή Gauss-Jordan Παραγοντοποίηση LU, LDU Επιμέλεια: Ι. Λυχναρόπουλος Παράδειγμα x y Να επιλυθεί το ακόλουθο σύστημα: x+ y 6 Σε μορφή πινάκων το σύστημα γράφεται ως: x y
Παραδείγματα Απαλοιφή Gauss Απαλοιφή Gauss-Jordan Παραγοντοποίηση LU, LDU Επιμέλεια: Ι. Λυχναρόπουλος Παράδειγμα x y Να επιλυθεί το ακόλουθο σύστημα: x+ y 6 Σε μορφή πινάκων το σύστημα γράφεται ως: x y
Τετραγωνικά μοντέλα. Τετραγωνικό μοντέλο συνάρτησης. Παράδειγμα τετραγωνικού μοντέλου #1. Παράδειγμα τετραγωνικού μοντέλου #1
 Τετραγωνικό μοντέλο συνάρτησης Τετραγωνικά μοντέλα Δ. Γ. Παπαγεωργίου Τμήμα Μηχανικών Επιστήμης Υλικών Πανεπιστήμιο Ιωαννίνων dpapageo@cc.uoi.gr http://pc164.materials.uoi.gr/dpapageo Για συνάρτηση μιας
Τετραγωνικό μοντέλο συνάρτησης Τετραγωνικά μοντέλα Δ. Γ. Παπαγεωργίου Τμήμα Μηχανικών Επιστήμης Υλικών Πανεπιστήμιο Ιωαννίνων dpapageo@cc.uoi.gr http://pc164.materials.uoi.gr/dpapageo Για συνάρτηση μιας
Κεφάλαιο 2: Διανυσματικός λογισμός συστήματα αναφοράς
 Κεφάλαιο 2: Διανυσματικός λογισμός συστήματα αναφοράς 2.1 Η έννοια του διανύσματος Ο τρόπος που παριστάνομε τα διανυσματικά μεγέθη είναι με τη μαθηματική έννοια του διανύσματος. Διάνυσμα δεν είναι τίποτε
Κεφάλαιο 2: Διανυσματικός λογισμός συστήματα αναφοράς 2.1 Η έννοια του διανύσματος Ο τρόπος που παριστάνομε τα διανυσματικά μεγέθη είναι με τη μαθηματική έννοια του διανύσματος. Διάνυσμα δεν είναι τίποτε
Κεφάλαιο 4 Διανυσματικοί Χώροι
 Κεφάλαιο Διανυσματικοί Χώροι Διανυσματικοί χώροι - Βασικοί ορισμοί και ιδιότητες Θεωρούμε τρία διαφορετικά σύνολα: Διανυσματικοί Χώροι α) Το σύνολο διανυσμάτων (πινάκων με μία στήλη) με στοιχεία το οποίο
Κεφάλαιο Διανυσματικοί Χώροι Διανυσματικοί χώροι - Βασικοί ορισμοί και ιδιότητες Θεωρούμε τρία διαφορετικά σύνολα: Διανυσματικοί Χώροι α) Το σύνολο διανυσμάτων (πινάκων με μία στήλη) με στοιχεία το οποίο
Έλεγχος Αλληλεπίδρασης με το. Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control)
") Έλεγχος Αλληλεπίδρασης με το Περιβάλλον Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control) Έλεγχος Εμπέδησης (Impeance Control) Αλληλεπίδραση με το περιβάλλον Η αλληλεπίδραση με το περιβάλλον
Έλεγχος Αλληλεπίδρασης με το Περιβάλλον Έλεγχος «Συμμόρφωσης» ή «Υποχωρητικότητας» (Compliance Control) Έλεγχος Εμπέδησης (Impeance Control) Αλληλεπίδραση με το περιβάλλον Η αλληλεπίδραση με το περιβάλλον
Σπιν 1 2. Γενικά. Ŝ και S ˆz γράφονται. ιδιοκαταστάσεις αποτελούν ορθοκανονική βάση στον χώρο των καταστάσεων του σπιν 1 2.
 Σπιν Γενικά Θα χρησιμοποιήσουμε τις γενικές σχέσεις που αποδείξαμε στην ανάρτηση «Εύρεση των ιδιοτιμών της στροφορμής», που, όπως είδαμε, ισχύουν για κάθε γενική στροφορμή ˆ J με συνιστώσες Jˆ, Jˆ, J ˆ,
Σπιν Γενικά Θα χρησιμοποιήσουμε τις γενικές σχέσεις που αποδείξαμε στην ανάρτηση «Εύρεση των ιδιοτιμών της στροφορμής», που, όπως είδαμε, ισχύουν για κάθε γενική στροφορμή ˆ J με συνιστώσες Jˆ, Jˆ, J ˆ,
Χαρακτηριστική Εξίσωση Πίνακα
 Έστω ο n nτετραγωνικός πίνακας A της μορφής a L a M O M an L a όπου aij, i n, j n πραγματικές σταθερές Ονομάζουμε χαρακτηριστική εξίσωση του πίνακα A την εξίσωση A λi, όπου I ο n n μοναδιαίος πίνακας και
Έστω ο n nτετραγωνικός πίνακας A της μορφής a L a M O M an L a όπου aij, i n, j n πραγματικές σταθερές Ονομάζουμε χαρακτηριστική εξίσωση του πίνακα A την εξίσωση A λi, όπου I ο n n μοναδιαίος πίνακας και
ΤΕΤΥ Εφαρμοσμένα Μαθηματικά 1. Τελεστές και πίνακες. 1. Τελεστές και πίνακες Γενικά. Τι είναι συνάρτηση? Απεικόνιση ενός αριθμού σε έναν άλλο.
 ΤΕΤΥ Εφαρμοσμένα Μαθηματικά 1 Τελεστές και πίνακες 1. Τελεστές και πίνακες Γενικά Τι είναι συνάρτηση? Απεικόνιση ενός αριθμού σε έναν άλλο. Ανάλογα, τελεστής είναι η απεικόνιση ενός διανύσματος σε ένα
ΤΕΤΥ Εφαρμοσμένα Μαθηματικά 1 Τελεστές και πίνακες 1. Τελεστές και πίνακες Γενικά Τι είναι συνάρτηση? Απεικόνιση ενός αριθμού σε έναν άλλο. Ανάλογα, τελεστής είναι η απεικόνιση ενός διανύσματος σε ένα
Άσκηση 13. Θεωρήματα Δικτύων
 Άσκηση Θεωρήματα Δικτύων. Θεώρημα Βρόχων ΣΚΟΠΟΣ Πειραματική επαλήθευση της μεθόδου των βρογχικών ρευμάτων. ΘΕΩΡΙΑ Με τη μέθοδο των βρογχικών ρευμάτων, η επίλυση ενός κυκλώματος στηρίζεται στον υπολογισμό
Άσκηση Θεωρήματα Δικτύων. Θεώρημα Βρόχων ΣΚΟΠΟΣ Πειραματική επαλήθευση της μεθόδου των βρογχικών ρευμάτων. ΘΕΩΡΙΑ Με τη μέθοδο των βρογχικών ρευμάτων, η επίλυση ενός κυκλώματος στηρίζεται στον υπολογισμό
Διανύσµατα στο επίπεδο
 Διανύσµατα στο επίπεδο Ένα διάνυσµα v έχει αρχικό και τελικό σηµείο. Χαρακτηρίζεται από: διεύθυνση (ευθεία επί της οποίας κείται φορά (προς ποια κατεύθυνση της ευθείας δείχνει µέτρο (το µήκος του, v ή
Διανύσµατα στο επίπεδο Ένα διάνυσµα v έχει αρχικό και τελικό σηµείο. Χαρακτηρίζεται από: διεύθυνση (ευθεία επί της οποίας κείται φορά (προς ποια κατεύθυνση της ευθείας δείχνει µέτρο (το µήκος του, v ή
Α.Τ.Ε.Ι. ΜΑΚΕΔΟΝΙΑΣ Τμήμα πληροφορικής και επικοινωνιών. Συμπίεση ψηφιακών εικόνων με ανάλυση κύριων συνιστωσών και χρήση νευρωνικού δικτύου.
 ΑΤΕΙ ΜΑΚΕΔΟΝΙΑΣ Τμήμα πληροφορικής και επικοινωνιών Συμπίεση ψηφιακών εικόνων με ανάλυση κύριων συνιστωσών και χρήση νευρωνικού δικτύου Ψηφιακή είκόνα Η ψηφιακή εικόνα είναι ένα πεπερασμένο σύνολο περιοχών
ΑΤΕΙ ΜΑΚΕΔΟΝΙΑΣ Τμήμα πληροφορικής και επικοινωνιών Συμπίεση ψηφιακών εικόνων με ανάλυση κύριων συνιστωσών και χρήση νευρωνικού δικτύου Ψηφιακή είκόνα Η ψηφιακή εικόνα είναι ένα πεπερασμένο σύνολο περιοχών
 Β Γραφικές παραστάσεις - Πρώτο γράφημα Σχεδιάζοντας το μήκος της σανίδας συναρτήσει των φάσεων της σελήνης μπορείτε να δείτε αν υπάρχει κάποιος συσχετισμός μεταξύ των μεγεθών. Ο συνήθης τρόπος γραφικής
Β Γραφικές παραστάσεις - Πρώτο γράφημα Σχεδιάζοντας το μήκος της σανίδας συναρτήσει των φάσεων της σελήνης μπορείτε να δείτε αν υπάρχει κάποιος συσχετισμός μεταξύ των μεγεθών. Ο συνήθης τρόπος γραφικής
Άλγεβρα Α Λυκείου Κεφάλαιο 2ο. οι πράξεις και οι ιδιότητές τους
 οι πράξεις και οι ιδιότητές τους Μερικές ακόμη ταυτότητες (επιπλέον από τις αξιοσημείωτες που βρίσκονται στο σχολικό βιβλίο) ) Διαφορά δυνάμεων με ίδιο εκθέτη: ειδικά αν ο εκθέτης ν είναι άρτιος υπάρχει
οι πράξεις και οι ιδιότητές τους Μερικές ακόμη ταυτότητες (επιπλέον από τις αξιοσημείωτες που βρίσκονται στο σχολικό βιβλίο) ) Διαφορά δυνάμεων με ίδιο εκθέτη: ειδικά αν ο εκθέτης ν είναι άρτιος υπάρχει
Εφαρμοσμένα Μαθηματικά ΙΙ 10ο Σετ Ασκήσεων (Λύσεις) Γραμμικοί Μετασχηματισμοί
 Γραμμικοί Μετασχηματισμοί") Εφαρμοσμένα Μαθηματικά ΙΙ ο Σετ Ασκήσεων (Λύσεις) Γραμμικοί Μετασχηματισμοί Επιμέλεια: Ι. Λυχναρόπουλος. Να εξετασθεί αν είναι γραμμικές οι ακόλουθες συναρτήσεις: a) f : R R με f b) f : R R f y, ( +, y
Εφαρμοσμένα Μαθηματικά ΙΙ ο Σετ Ασκήσεων (Λύσεις) Γραμμικοί Μετασχηματισμοί Επιμέλεια: Ι. Λυχναρόπουλος. Να εξετασθεί αν είναι γραμμικές οι ακόλουθες συναρτήσεις: a) f : R R με f b) f : R R f y, ( +, y