Termovizijski sistemi MS1TS
|
|
|
- Φωτινή Κανακάρης-Ρούφος
- 7 χρόνια πριν
- Προβολές:
Transcript
1 Termovizijski sistemi MS1TS Vežbe 03 primer 1 Odredjivanje konvolucije numeričkom integracijom. x=(-2:0.01:2)'; f=triangle_function(x); y=zeros(length(x),1); for brojac=1:length(x) xt=x(brojac); r_f=@(u)triangle_function(u).*triangle_function(u-xt); y(brojac)=quad(r_f,-2,2); plot(x,f,x,y),xlabel('\itx'),ylabel('{\itf}({\itx}), {\itf}({\itx})*{\itf}({\itx})'), ylim([0 1.1*max(max([abs(f) abs(y)]))]), legend('{\itf}({\itx})=tri({\itx})','{\itf}({\itx})*{\itf}({\itx})'); primer 2 Odredjivanje konvolucije numeričkom integracijom. x=(-2:0.01:2)'; f=triangle_function(x); g=rectangle_function(x); y=zeros(length(x),1); for brojac=1:length(x) xt=x(brojac); r_f=@(u)rectangle_function(u).*triangle_function(u-xt); y(brojac)=quad(r_f,-2,2); plot(x,f,x,g,x,y),xlabel('\itx'), ylabel('{\itf}({\itx}), {\itg}({\itx}), {\itf}({\itx})*{\itg}({\itx})'), ylim([0 1.1*max(max([abs(f) abs(g) abs(y)]))]), legend('{\itf}({\itx})=tri({\itx})','{\itg}({\itx})=rec({\itx})','{\itf}({\itx})*{\itg}({\itx})');
2 primer 3 Odredjivanje konvolucije numeričkom integracijom i preko conv funkcije. x=(-2:0.01:2)'; f=triangle_function(x); g=gaus_function(x-.2); y=zeros(length(x),1); for brojac=1:length(x) xt=x(brojac); r_f=@(u)gaus_function(u-.2).*triangle_function(u-xt); y(brojac)=quad(r_f,-5,5); h=0.01*conv(f,fliplr(g),'same'); plot(x,f,x,g,x,y,x,h,':'),xlabel('\itx'), ylabel('{\itf}({\itx}), {\itg}({\itx}), {\itf}({\itx})*{\itg}({\itx})'), ylim([0 1.1*max(max([abs(f) abs(g) abs(y) abs(h)]))]), legend('{\itf}({\itx})=tri({\itx})','{\itg}({\itx})=gaus({\itx}- 0.2)','{\itf}({\itx})*{\itg}({\itx}) - NI','{\itf}({\itx})*{\itg}({\itx}) - conv f-ja');
3 primer 4 Odredjivanje konvolucije numeričkom integracijom - komutativnost. x=(-3:0.001:3)'; f=triangle_function(x); g=gaus_function(x-.5); y=zeros(length(x),1); z=zeros(length(x),1); for brojac=1:length(x) xt=x(brojac); r_f=@(u)gaus_function(u-.5).*triangle_function(u-xt); y(brojac)=quad(r_f,-5,5); for brojac=1:length(x) xt=x(brojac); r_f=@(u)gaus_function(u-.5+xt).*triangle_function(u); z(brojac)=quad(r_f,-5,5); plot(x,f,x,g,x,y,x,z,':'),xlabel('\itx'),ylabel('{\itf}({\itx}), {\itg}({\itx}), {\itf}({\itx})*{\itg}({\itx}), {\itf}({\itg})*{\itf}({\itx})'), ylim([0 1.1*max(max([abs(f) abs(g) abs(y) abs(z)]))]), legend('{\itf}({\itx})=tri({\itx})','{\itg}({\itx})=gaus({\itx}- 0.5)','{\itf}({\itx})*{\itg}({\itx})','{\itg}({\itx})*{\itf}({\itx})');
4 primer 5 Odredjivanje konvolucije dvodimenzionalne funkcije koja "razdvaja" promenljive. g g g x, y = g x g y ( ) ( ) ( ) ( ) x, y = ( f ( x) h ( x) )( f ( y) h ( y) ) ( x, y) = f ( x, y) h( x, y) = f ( u) f ( t) h ( x u) h ( y t) = f ( u) h ( x u) du f ( t) h ( y t) dt = ( f ( x) h ( x) )( f ( y) h ( y) ) clc dx=0.05; x=(-5:dx:5)'; dy=0.05; y=(-2:dy:2)'; [,]=meshgrid(x,y); f=rectangle_function().*rectangle_function(); h=rectangle_function(/2).*rectangle_function(/2); g1=dx*conv(rectangle_function(x),rectangle_function(x/2),'same'); g2=dy.*conv(rectangle_function(y),rectangle_function(y/2),'same'); for brx=1:length(x) for bry=1:length(y) g(bry,brx)=g1(brx)*g2(bry); figure,subplot(3,2,1),mesh(,,f),xlabel('\itx'),ylabel('\ity'),zlabel('{\itf}({\itx},{\ity})'); subplot(3,2,2),mesh(,,f),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=rect({\itx})*rect({\ity})'); subplot(3,2,3),mesh(,,h),xlabel('\itx'),ylabel('\ity'),zlabel('{\ith}({\itx},{\ity})'); subplot(3,2,4),mesh(,,h),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=rect({\itx}/2)*rect({\ity}/2)'); subplot(3,2,5),mesh(,,g),xlabel('\itx'),ylabel('\ity'),zlabel('{\itg}({\itx},{\ity})'); subplot(3,2,6),mesh(,,g),xlabel('\itx'),ylabel('\ity'),view([0 90]); title('{\itg}({\itx},{\ity})={\itf}({\itx},{\ity})*{\ith}({\itx},{\ity})'); dudt
5 primer 6 Odredjivanje konvolucije dvodimenzionalne funkcije koja "razdvaja" promenljive, MATLAB funkcija conv2. dx=0.05; x=(-5:dx:5)'; dy=0.05; y=(-2:dy:2)'; [,]=meshgrid(x,y); f=rectangle_function().*rectangle_function(); h=rectangle_function(/2).*rectangle_function(/2); g=dx*dy*conv2(f,h,'same'); figure,subplot(3,2,1),mesh(,,f),xlabel('\itx'),ylabel('\ity'),zlabel('{\itf}({\itx},{\ity})'); subplot(3,2,2),mesh(,,f),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=rect({\itx})*rect({\ity})'); subplot(3,2,3),mesh(,,h),xlabel('\itx'),ylabel('\ity'),zlabel('{\ith}({\itx},{\ity})'); subplot(3,2,4),mesh(,,h),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=rect({\itx}/2)*rect({\ity}/2)'); subplot(3,2,5),mesh(,,g),xlabel('\itx'),ylabel('\ity'),zlabel('{\itg}({\itx},{\ity})'); subplot(3,2,6),mesh(,,g),xlabel('\itx'),ylabel('\ity'),view([0 90]); title('{\itg}({\itx},{\ity})={\itf}({\itx},{\ity})*{\ith}({\itx},{\ity})');
![primer 7 Odredjivanje konvolucije dvodimenzionalne funkcije koja "razdvaja" promenljive. dx=0.05; x=(-5:dx:5)'; dy=0.05; y=(-5:dy:5)'; [,]=meshgrid(x,y); f=rectangle_function().](/docs-images/72/66341065/images/6-0.jpg "*rectangle_function(); h=gaus_function(-2).*gaus_function(-2); g1=dx*conv(rectangle_function(x),gaus_function(x-2),'same'); g2=dy.")
6 primer 7 Odredjivanje konvolucije dvodimenzionalne funkcije koja "razdvaja" promenljive. dx=0.05; x=(-5:dx:5)'; dy=0.05; y=(-5:dy:5)'; [,]=meshgrid(x,y); f=rectangle_function().*rectangle_function(); h=gaus_function(-2).*gaus_function(-2); g1=dx*conv(rectangle_function(x),gaus_function(x-2),'same'); g2=dy.*conv(rectangle_function(y),gaus_function(y-2),'same'); for brx=1:length(x) for bry=1:length(y) g(bry,brx)=g1(brx)*g2(bry); figure,subplot(3,2,1),mesh(,,f),xlabel('\itx'),ylabel('\ity'),zlabel('{\itf}({\itx},{\ity})'); subplot(3,2,2),mesh(,,f),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=rect({\itx})*rect({\ity})'); subplot(3,2,3),mesh(,,h),xlabel('\itx'),ylabel('\ity'),zlabel('{\ith}({\itx},{\ity})'); subplot(3,2,4),mesh(,,h),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=gaus({\itx}-2)*gaus({\ity}-2)'); subplot(3,2,5),mesh(,,g),xlabel('\itx'),ylabel('\ity'),zlabel('{\itg}({\itx},{\ity})'); subplot(3,2,6),mesh(,,g),xlabel('\itx'),ylabel('\ity'),view([0 90]); title('{\itg}({\itx},{\ity})={\itf}({\itx},{\ity})*{\ith}({\itx},{\ity})');
7 primer 8 Odredjivanje konvolucije dvodimenzionalne funkcije koja "razdvaja" promenljive, MATLAB funkcija conv2. dx=0.05; x=(-5:dx:5)'; dy=0.05; y=(-5:dy:5)'; [,]=meshgrid(x,y); f=rectangle_function().*rectangle_function(); h=gaus_function(-2).*gaus_function(-2); g=dx*dy*conv2(f,h,'same'); figure,subplot(3,2,1),mesh(,,f),xlabel('\itx'),ylabel('\ity'),zlabel('{\itf}({\itx},{\ity})'); subplot(3,2,2),mesh(,,f),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=rect({\itx})*rect({\ity})'); subplot(3,2,3),mesh(,,h),xlabel('\itx'),ylabel('\ity'),zlabel('{\ith}({\itx},{\ity})'); subplot(3,2,4),mesh(,,h),xlabel('\itx'),ylabel('\ity'),view([0 90]), title('{\itf}({\itx},{\ity})=gaus({\itx}-2)*gaus({\ity}-2)'); subplot(3,2,5),mesh(,,g),xlabel('\itx'),ylabel('\ity'),zlabel('{\itg}({\itx},{\ity})'); subplot(3,2,6),mesh(,,g),xlabel('\itx'),ylabel('\ity'),view([0 90]); title('{\itg}({\itx},{\ity})={\itf}({\itx},{\ity})*{\ith}({\itx},{\ity})');
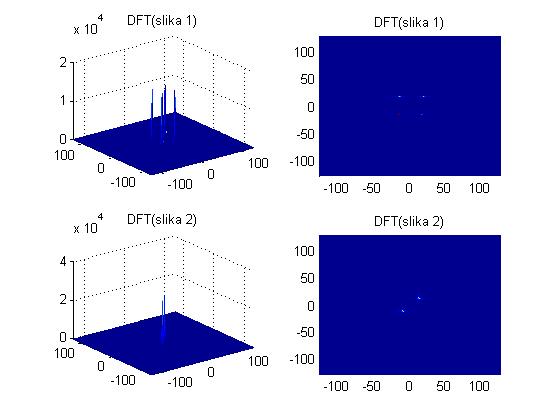
8 primer 9 Dvodimenzionalna DFT. F f j2π [ xξ + yη ] ( ξ, η) f ( x, y) e = dxdy j2π [ xξ + yη ] ( x, y) F( ξ, η) e = dξdη Za funkcije koje razdvajaju promenljive: F ξ, η = F f x F f y ( ) { ( )} { ( )} N=128; M=256; slika1=zeros(m,n); slika2=zeros(m,n); for n=1:n for m=1:m slika1(m,n)=cos(2*pi*m/16); slika2(m,n)=cos(2*pi*n/4); figure,subplot(2,2,1),mesh(slika1),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 1'); subplot(2,2,2),mesh(slika1),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 1'); subplot(2,2,3),mesh(slika2),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]),ylim([0 M]), title('slika 2'); subplot(2,2,4),mesh(slika2),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 2'); colormap gray figure,subplot(2,2,1),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))), subplot(2,2,2),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))),view([0 90]), subplot(2,2,3),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))), subplot(2,2,4),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))),view([0 90]), colormap jet

9
10 primer 10 Dvodimenzionalna DFT. N=128; M=256; slika1=zeros(m,n); slika2=zeros(m,n); for n=1:n for m=1:m slika1(m,n)=cos(2*pi*m/32)*cos(2*pi*n/8); slika2(m,n)=cos(2*pi*m/4)*cos(2*pi*n/64); figure,subplot(2,2,1),mesh(slika1),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 1'); subplot(2,2,2),mesh(slika1),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 1'); subplot(2,2,3),mesh(slika2),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]),ylim([0 M]), title('slika 2'); subplot(2,2,4),mesh(slika2),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 2'); colormap gray figure,subplot(2,2,1),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))), subplot(2,2,2),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))),view([0 90]), subplot(2,2,3),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))), subplot(2,2,4),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))),view([0 90]), colormap jet
11 primer 11 Dvodimenzionalna DFT. N=256; M=256; slika1=zeros(m,n); slika2=zeros(m,n); for n=1:n for m=1:m slika1(m,n)=cos(2*pi*(m+n)/16); slika2(m,n)=cos(2*pi*(m+n)/16/sqrt(2)); figure,subplot(2,2,1),mesh(slika1),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 1'); subplot(2,2,2),mesh(slika1),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 1'); subplot(2,2,3),mesh(slika2),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]),ylim([0 M]), title('slika 2'); subplot(2,2,4),mesh(slika2),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 N]), ylim([0 M]),title('slika 2'); colormap gray figure,subplot(2,2,1),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))), subplot(2,2,2),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))),view([0 90]), subplot(2,2,3),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))), subplot(2,2,4),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))),view([0 90]), colormap jet
12
13 primer 12 Dvodimenzionalna DFT. N=256; M=256; slika1=zeros(m,n); slika2=zeros(m,n); for n=1:n for m=1:m slika1(m,n)=cos(2*pi*(m+n)/16); slika2(m,n)=cos(2*pi*(m+n)/16/sqrt(2)); figure,subplot(2,2,1),mesh([slika1 slika1; slika1 slika1]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 2*N]),ylim([0 2*M]),title('slika 1'); subplot(2,2,2),mesh([slika1 slika1; slika1 slika1]),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 2*N]),ylim([0 2*M]),title('slika 1'); subplot(2,2,3),mesh([slika2 slika2; slika2 slika2]),xlabel('{\itn}'),ylabel('{\itm}'), xlim([0 2*N]),ylim([0 2*M]),title('slika 2'); subplot(2,2,4),mesh([slika2 slika2; slika2 slika2]), view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 2*N]),ylim([0 2*M]),title('slika 2'); colormap gray figure,subplot(2,2,1),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))), subplot(2,2,2),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))),view([0 90]), subplot(2,2,3),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))), subplot(2,2,4),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))),view([0 90]), colormap jet
14 primer 13 Dvodimenzionalna DFT. N=256; M=256; slika1=zeros(m,n); slika2=zeros(m,n); for n=1:n for m=1:m slika1(m,n)=cos(2*pi*m/16)*cos(2*pi*n/5/pi); slika2(m,n)=cos(2*pi*(m+n)/16/sqrt(2)); figure,subplot(2,2,1),mesh([slika1 slika1; slika1 slika1]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 2*N]),ylim([0 2*M]),title('slika 1'); subplot(2,2,2),mesh([slika1 slika1; slika1 slika1]),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 2*N]),ylim([0 2*M]),title('slika 1'); subplot(2,2,3),mesh([slika2 slika2; slika2 slika2]),xlabel('{\itn}'),ylabel('{\itm}'), xlim([0 2*N]),ylim([0 2*M]),title('slika 2'); subplot(2,2,4),mesh([slika2 slika2; slika2 slika2]),view([0 90]),xlabel('{\itn}'),ylabel('{\itm}'),xlim([0 2*N]),ylim([0 2*M]),title('slika 2'); colormap gray figure,subplot(2,2,1),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))), subplot(2,2,2),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika1)))),view([0 90]), subplot(2,2,3),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))), subplot(2,2,4),mesh((-n/2:n/2-1),(-m/2:m/2-1),fftshift(abs(fft2(slika2)))),view([0 90]), colormap jet
15
16 primer 14 Dvodimenzionalna convolucija - odziv linearnog shift invarijantnog sistema. dx=0.05; dy=0.05; x=[-5:dx:5]; y=[-2:dy:2]; a=1; b=10^(-5); [,]=meshgrid(x,y); delta_2_f=(exp(-pi*((-a)/b).^2)/abs(b)+exp(-pi*((+a)/b).^2)/abs(b)); delta_f=exp(-pi*(()/b).^2)/abs(b); f=delta_2_f.*delta_f; % pobuda h=somb_function(x,y,0); % impulsni odziv g=somb_function(x+1,y,0)+somb_function(x-1,y,0); % teorijski odredjen odziv g1=dx*dx*conv2(f,h,'same'); % konvolucija pobude i impulsnog odziva figure,subplot(3,2,1),mesh(,,f),xlabel('{\itx}'),ylabel('{\ity}'), zlabel('{\itf}({\itx},{\ity})'),title('pobuda'); subplot(3,2,2),mesh(,,f), view([0 90]),xlabel('{\itx}'),ylabel('{\ity}'),zlabel('{\itf}({\itx},{\ity})'),title('Pobuda'); subplot(3,2,3),mesh(,,h),xlabel('{\itx}'),ylabel('{\ity}'),zlabel('{\itf}({\itx},{\ity})'), title('impulsni odziv'); subplot(3,2,4),mesh(,,h),view([0 90]),xlabel('{\itx}'),ylabel('{\ity}'),zlabel('{\itf}({\itx},{\ity})'),title('Impulsni odziv'); subplot(3,2,5),mesh(,,g1),xlabel('{\itx}'),ylabel('{\ity}'),zlabel('{\itg}({\itx},{\ity})'), title('odziv sistema na zadatu pobudu'); subplot(3,2,6),mesh(,,g1),view([0 90]),xlabel('{\itx}'),ylabel('{\ity}'),zlabel('{\itg}({\itx},{\ity})'), title('odziv sistema na zadatu pobudu');
Termovizijski sistemi MS1TS
 Termovizijski sistemi MS1TS Vežbe 02 primer 1 MATLAB funkcija conv. f x = rect x rect x 2 ( ) ( ) ( ) y=conv(rectangle_function(x),rectangle_function(x-2)); figure,subplot(3,1,1),plot(x,rectangle_function(x)),xlabel('\itx'),ylabel('rect({\itx})');
Termovizijski sistemi MS1TS Vežbe 02 primer 1 MATLAB funkcija conv. f x = rect x rect x 2 ( ) ( ) ( ) y=conv(rectangle_function(x),rectangle_function(x-2)); figure,subplot(3,1,1),plot(x,rectangle_function(x)),xlabel('\itx'),ylabel('rect({\itx})');
 y(t) S x(t) S dy dx E, E E T1 T2 T1 T2 1 T 1 T 2 2 T 2 1 T 2 2 3 T 3 1 T 3 2... V o R R R T V CC P F A P g h V ext V sin 2 S f S t V 1 V 2 V out sin 2 f S t x 1 F k q K x q K k F d F x d V
y(t) S x(t) S dy dx E, E E T1 T2 T1 T2 1 T 1 T 2 2 T 2 1 T 2 2 3 T 3 1 T 3 2... V o R R R T V CC P F A P g h V ext V sin 2 S f S t V 1 V 2 V out sin 2 f S t x 1 F k q K x q K k F d F x d V
Linearni vremenski invarijantni (LTI) kontinualni sistemi
 kontinualni sistemi") Linearni vremenski invarijantni (LTI) kontinualni sistemi LTI sistemi n LTI L - linear TI time-invariant n većina fizičkih procesa poseduje ova svojstva i mogu se modelirati kao LTI sistemi, n pogodni
Linearni vremenski invarijantni (LTI) kontinualni sistemi LTI sistemi n LTI L - linear TI time-invariant n većina fizičkih procesa poseduje ova svojstva i mogu se modelirati kao LTI sistemi, n pogodni
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
Funkcija prenosa. Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k.
 OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
KONVEKSNI SKUPOVI. Definicije: potprostor, afin skup, konveksan skup, konveksan konus. 1/5. Back FullScr
 KONVEKSNI SKUPOVI Definicije: potprostor, afin skup, konveksan skup, konveksan konus. 1/5 KONVEKSNI SKUPOVI Definicije: potprostor, afin skup, konveksan skup, konveksan konus. 1/5 1. Neka su x, y R n,
KONVEKSNI SKUPOVI Definicije: potprostor, afin skup, konveksan skup, konveksan konus. 1/5 KONVEKSNI SKUPOVI Definicije: potprostor, afin skup, konveksan skup, konveksan konus. 1/5 1. Neka su x, y R n,
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
ΠΡΟΣΩΡΙΝΕΣ ΕΘΝΙΚΕΣ ΤΕΧΝΙΚΕΣ ΠΡΟ ΙΑΓΡΑΦΕΣ
 ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ Υ.ΠΕ.ΧΩ..Ε. ΠΡΟΣΩΡΙΝΕΣ ΕΘΝΙΚΕΣ ΤΕΧΝΙΚΕΣ ΠΡΟ ΙΑΓΡΑΦΕΣ ΠΕΤΕΠ 13-05-03-00 13 Κατασκευή φραγµάτων 05 Όργανα µετρήσεων και παρακολούθησης της συµπεριφοράς φραγµάτων 03 Κατασκευή βάθρων τριγωνοµετρικών
ΕΛΛΗΝΙΚΗ ΗΜΟΚΡΑΤΙΑ Υ.ΠΕ.ΧΩ..Ε. ΠΡΟΣΩΡΙΝΕΣ ΕΘΝΙΚΕΣ ΤΕΧΝΙΚΕΣ ΠΡΟ ΙΑΓΡΑΦΕΣ ΠΕΤΕΠ 13-05-03-00 13 Κατασκευή φραγµάτων 05 Όργανα µετρήσεων και παρακολούθησης της συµπεριφοράς φραγµάτων 03 Κατασκευή βάθρων τριγωνοµετρικών
MATEMATIKA 2. Grupa 1 Rexea zadataka. Prvi pismeni kolokvijum, Dragan ori
 MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
z k z + n N f(z n ) + K z n = z n 1 2N
 + K z n = z n 1 2N") Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά 6..5 Λύσεις Σειράς Ασκήσεων Άσκηση (α) Έστω z το όριο της ακολουθίας z n, δηλ. για κάθε ɛ > υπάρχει N(ɛ) ώστε z n z < ɛ για n > N. Για n > N(ɛ), είναι z n
Πανεπιστήμιο Θεσσαλίας Εφαρμοσμένα Μαθηματικά 6..5 Λύσεις Σειράς Ασκήσεων Άσκηση (α) Έστω z το όριο της ακολουθίας z n, δηλ. για κάθε ɛ > υπάρχει N(ɛ) ώστε z n z < ɛ για n > N. Για n > N(ɛ), είναι z n
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
ΠΑΡΑΡΤΗΜΑ Α. Σήμα Συμμόρφωσης της Εταιρείας «ΚΟΥΝΑΤΙΔΗΣ ΧΑΡΑΛΑΜΠΟΣ OCTOPUS»
 ΜΕΤΑΛΛΙΚΗ ΚΟΥΝΙΑ ΠΑΙΔΩΝ 2 ΘΕΣΕΩΝ 10.01 ΜΕΤΑΛΛΙΚΗ ΚΟΥΝΙΑ ΝΗΠΙΩΝ 2 ΘΕΣΕΩΝ 10.02 ΔΙΘΕΣΙΑ ΚΟΥΝΙΑ ΠΑΙΔΩΝ 10.04 ΔΙΘΕΣΙΑ ΜΕΤΑΛΛΙΚΗ ΚΟΥΝΙΑ ΠΑΙΔΩΝ-ΝΗΠΙΩΝ 10.05 ΤΕΤΡΑΘΕΣΙΑ ΚΟΥΝΙΑ ΠΑΙΔΩΝ 10.06 ΔΙΘΕΣΙΑ ΚΟΥΝΙΑ ΝΗΠΙΩΝ
ΜΕΤΑΛΛΙΚΗ ΚΟΥΝΙΑ ΠΑΙΔΩΝ 2 ΘΕΣΕΩΝ 10.01 ΜΕΤΑΛΛΙΚΗ ΚΟΥΝΙΑ ΝΗΠΙΩΝ 2 ΘΕΣΕΩΝ 10.02 ΔΙΘΕΣΙΑ ΚΟΥΝΙΑ ΠΑΙΔΩΝ 10.04 ΔΙΘΕΣΙΑ ΜΕΤΑΛΛΙΚΗ ΚΟΥΝΙΑ ΠΑΙΔΩΝ-ΝΗΠΙΩΝ 10.05 ΤΕΤΡΑΘΕΣΙΑ ΚΟΥΝΙΑ ΠΑΙΔΩΝ 10.06 ΔΙΘΕΣΙΑ ΚΟΥΝΙΑ ΝΗΠΙΩΝ
 γ n ϑ n n ψ T 8 Q 6 j, k, m, n, p, r, r t, x, y f m (x) (f(x)) m / a/b (f g)(x) = f(g(x)) n f f n I J α β I = α + βj N, Z, Q ϕ Εὐκλείδης ὁ Ἀλεξανδρεύς Στοιχεῖα ἄκρος καὶ μέσος λόγος ὕδωρ αἰθήρ ϕ φ Φ τ
γ n ϑ n n ψ T 8 Q 6 j, k, m, n, p, r, r t, x, y f m (x) (f(x)) m / a/b (f g)(x) = f(g(x)) n f f n I J α β I = α + βj N, Z, Q ϕ Εὐκλείδης ὁ Ἀλεξανδρεύς Στοιχεῖα ἄκρος καὶ μέσος λόγος ὕδωρ αἰθήρ ϕ φ Φ τ
Λύσεις ασκήσεων 6. Οι συντελεστές του αναπτύγματος υπολογίζονται ως εξής: = y( ( 1) = 2 L. L n. = 0 Αναζητούμε αρμονική λύση για y(x) λόγω ΣΣ
 = 2 L. L n. = 0 Αναζητούμε αρμονική λύση για y(x) λόγω ΣΣ") Λύσεις ασκήσεων 6. y + y, y() y( ) Αναζητούμε αρμονική λύση για y(x) λόγω ΣΣ λ k > y(x) As(kx) + Bsi(kx) y() A y() Bsi(k) B k,,,.. y (x) Bsi ( x ),,,.. ιδιοσυναρτήσεις Αν λ τετριμένη λύση. Οι ιδιοσυναρτήσεις
Λύσεις ασκήσεων 6. y + y, y() y( ) Αναζητούμε αρμονική λύση για y(x) λόγω ΣΣ λ k > y(x) As(kx) + Bsi(kx) y() A y() Bsi(k) B k,,,.. y (x) Bsi ( x ),,,.. ιδιοσυναρτήσεις Αν λ τετριμένη λύση. Οι ιδιοσυναρτήσεις
Pismeni dio ispita iz Matematike Riješiti sistem jednačina i diskutovati rješenja u zavisnosti od parametra a:
 Zenica, 70006 + y+ z+ 4= 0 y+ z : i ( q) : = = y + z 4 = 0 a) Napisati pavu p u kanonskom, a pavu q u paametaskom obliku b) Naći jednačinu avni koja polazi koz pavu p i okomita je na pavu q ate su pave
Zenica, 70006 + y+ z+ 4= 0 y+ z : i ( q) : = = y + z 4 = 0 a) Napisati pavu p u kanonskom, a pavu q u paametaskom obliku b) Naći jednačinu avni koja polazi koz pavu p i okomita je na pavu q ate su pave
X 1 = X1 = 1 (1) X 3 = X3 = 1 (2) X k e j2πk 1 2 t = k
 X 3 = X3 = 1 (2) X k e j2πk 1 2 t = k") ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Τµήµα Επιστήµης Υπολογιστών HY-5: Εφαρµοσµένα Μαθηµατικά για Μηχανικούς Εαρινό Εξάµηνο 6-7 ιδάσκοντες : Γ. Στυλιανού, Γ. Καφεντζής Λύσεις Τέταρτης Σειράς Ασκήσεων Ασκηση (i) Είναι T
ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Τµήµα Επιστήµης Υπολογιστών HY-5: Εφαρµοσµένα Μαθηµατικά για Μηχανικούς Εαρινό Εξάµηνο 6-7 ιδάσκοντες : Γ. Στυλιανού, Γ. Καφεντζής Λύσεις Τέταρτης Σειράς Ασκήσεων Ασκηση (i) Είναι T
Assignment 1 Solutions Complex Sinusoids
 Assignment Solutions Complex Sinusoids ECE 223 Signals and Systems II Version. Spring 26. Eigenfunctions of LTI systems. Which of the following signals are eigenfunctions of LTI systems? a. x[n] =cos(
Assignment Solutions Complex Sinusoids ECE 223 Signals and Systems II Version. Spring 26. Eigenfunctions of LTI systems. Which of the following signals are eigenfunctions of LTI systems? a. x[n] =cos(
2.7 Primjene odredenih integrala
 . INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
. INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
Ολοκληρώματα. ) x. f(x)dx = lim f(ξ. Παραδείγµατα Επισηµάνσεις Θεωρίας Θέµατα. f(ξκ) Επιµέλεια: Μάριος Ελευθεριάδης 1. + κ=1
 x. f(x)dx = lim f(ξ. Παραδείγµατα Επισηµάνσεις Θεωρίας Θέµατα. f(ξκ) Επιµέλεια: Μάριος Ελευθεριάδης 1. + κ=1") Ολοκληρώμτ Cf f(ξκ) = 3 κ-ξκ κ - = f()d = lim f(ξ κ ) + κ= Πρδείγµτ Επισηµάσεις Θεωρίς Θέµτ Επιµέλει: Μάριος Ελευθεριάδης . Αρχική συάρτηση ΟΛΟΚΛΗΡΩΜΑΤΑ Πρδείγµτ Επισηµάσεις Θεωρίς Θέµτ Ορισµός: Αρχική
Ολοκληρώμτ Cf f(ξκ) = 3 κ-ξκ κ - = f()d = lim f(ξ κ ) + κ= Πρδείγµτ Επισηµάσεις Θεωρίς Θέµτ Επιµέλει: Μάριος Ελευθεριάδης . Αρχική συάρτηση ΟΛΟΚΛΗΡΩΜΑΤΑ Πρδείγµτ Επισηµάσεις Θεωρίς Θέµτ Ορισµός: Αρχική
Τελική τοποθέτηση. Θα ανακεφαλαιώσω αυτά στα οποία κατέληξα εγώ, όσο πιο συνοπτικά γίνεται.
 Τελική τοποθέτηση Διονύση ξεκίνησες µε Σαββόπουλο, θα ανταποδώσω µε Μάνο Λοΐζο και Γιάννη Νεγρεπόντη: «Ο Γιόχαν, ο Φίσερ κι ο Φρανς, θα πέσουν σαν ήρωες κάτω απ τα τανκς» Φτάσαµε (;) στο τέλος µιας συζήτησης
Τελική τοποθέτηση Διονύση ξεκίνησες µε Σαββόπουλο, θα ανταποδώσω µε Μάνο Λοΐζο και Γιάννη Νεγρεπόντη: «Ο Γιόχαν, ο Φίσερ κι ο Φρανς, θα πέσουν σαν ήρωες κάτω απ τα τανκς» Φτάσαµε (;) στο τέλος µιας συζήτησης
0 2j e jπt e j2πkt dt (3)
") ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Τµήµα Επιστήµης Υπολογιστών HY-: Εφαρµοσµένα Μαθηµατικά για Μηχανικούς Εαρινό Εξάµηνο 7-8 ιδάσκοντες : Γ. Στυλιανού, Γ. Καφεντζής Τρίτη Σειρά Ασκήσεων - Λύσεις Ηµεροµηνία Ανάθεσης :
ΠΑΝΕΠΙΣΤΗΜΙΟ ΚΡΗΤΗΣ Τµήµα Επιστήµης Υπολογιστών HY-: Εφαρµοσµένα Μαθηµατικά για Μηχανικούς Εαρινό Εξάµηνο 7-8 ιδάσκοντες : Γ. Στυλιανού, Γ. Καφεντζής Τρίτη Σειρά Ασκήσεων - Λύσεις Ηµεροµηνία Ανάθεσης :
MATERIJAL ZA VEŽBE. Nastavnik: prof. dr Nataša Sladoje-Matić. Asistent: dr Tibor Lukić. Godina: 2012
 MATERIJAL ZA VEŽBE Predmet: MATEMATIČKA ANALIZA Nastavnik: prof. dr Nataša Sladoje-Matić Asistent: dr Tibor Lukić Godina: 202 . Odrediti domen funkcije f ako je a) f(x) = x2 + x x(x 2) b) f(x) = sin(ln(x
MATERIJAL ZA VEŽBE Predmet: MATEMATIČKA ANALIZA Nastavnik: prof. dr Nataša Sladoje-Matić Asistent: dr Tibor Lukić Godina: 202 . Odrediti domen funkcije f ako je a) f(x) = x2 + x x(x 2) b) f(x) = sin(ln(x
Περιεχόμενα. Εξίσωση Συνέχειας Αστρόβιλη Ροή Εξισώσεις Κίνησης. Σειρά ΙΙ 2
 Περιεχόμενα Εξίσωση Συνέχειας Αστρόβιλη Ροή Εξισώσεις Κίνησης Σειρά ΙΙ 2 Πεδίο ταχύτητας Όγκος Ελέγχου Καρτεσιανές Συντεταγμένες w+(/)dz z y u dz u+(/ x)dx x dy dx w Σειρά ΙΙ 3 1. Εισαγωγή 1.1 Εξίσωση
Περιεχόμενα Εξίσωση Συνέχειας Αστρόβιλη Ροή Εξισώσεις Κίνησης Σειρά ΙΙ 2 Πεδίο ταχύτητας Όγκος Ελέγχου Καρτεσιανές Συντεταγμένες w+(/)dz z y u dz u+(/ x)dx x dy dx w Σειρά ΙΙ 3 1. Εισαγωγή 1.1 Εξίσωση
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
MATEMATIKA II. Dr Boban Marinković
 MATEMATIKA II VEŽBE Dr Boban Marinković 1 Neodredjeni integral dx = x + C, dx x = ln x + C, dx = arcsin x + C, 1 x 2 a x dx = ax ln a + C, cos x dx = sin x + C, dx x 2 a = 1 2 2a ln x a x + a + C, dx x2
MATEMATIKA II VEŽBE Dr Boban Marinković 1 Neodredjeni integral dx = x + C, dx x = ln x + C, dx = arcsin x + C, 1 x 2 a x dx = ax ln a + C, cos x dx = sin x + C, dx x 2 a = 1 2 2a ln x a x + a + C, dx x2
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
ΕΝΔΕΙΚΤΙΚΕΣ ΠΛΗΡΕΙΣ ΑΠΑΝΤΗΣΕΙΣ. Α4. α) Λάθος. Το θεώρημα ισχύει για διάστημα και όχι για ένωση διαστημάτων που είναι το σύνολο Α. Π.χ.
 Λάθος. Το θεώρημα ισχύει για διάστημα και όχι για ένωση διαστημάτων που είναι το σύνολο Α. Π.χ.") ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ ΙΟΥΝΙΟΥ 9 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ:ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ENNIA (9) ΕΝΔΕΙΚΤΙΚΕΣ ΠΛΗΡΕΙΣ ΑΠΑΝΤΗΣΕΙΣ Α. α) Θεωρία σχολικού βιβλίου
ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ ΙΟΥΝΙΟΥ 9 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ:ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΣΥΝΟΛΟ ΣΕΛΙΔΩΝ: ENNIA (9) ΕΝΔΕΙΚΤΙΚΕΣ ΠΛΗΡΕΙΣ ΑΠΑΝΤΗΣΕΙΣ Α. α) Θεωρία σχολικού βιβλίου
Αυτόματος Έλεγχος. Ενότητα 4 η : Πρότυπα μεταβλητών κατάστασης. Παναγιώτης Σεφερλής. Εργαστήριο Δυναμικής Μηχανών Τμήμα Μηχανολόγων Μηχανικών
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 4 η : Πρότυπα μεταβλητών κατάστασης Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 4 η : Πρότυπα μεταβλητών κατάστασης Παναγιώτης Σεφερλής Εργαστήριο Δυναμικής Μηχανών Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Nastavna jedinica: Odziv LTI sustava. Prof.dr.sc. Zoran Vukić.
 Nasavna jedinica: Odziv LTI susava Prof.dr.sc. Zoran Vukić E-mail: zoran.vukic@fer.hr Odziv LTI susava Cilj Naučii posupke za određivanje odziva LTI susava (konvolucijom, L-ransformacijom, rješavanjem
Nasavna jedinica: Odziv LTI susava Prof.dr.sc. Zoran Vukić E-mail: zoran.vukic@fer.hr Odziv LTI susava Cilj Naučii posupke za određivanje odziva LTI susava (konvolucijom, L-ransformacijom, rješavanjem
 γ 1 6 M = 0.05 F M = 0.05 F M = 0.2 F M = 0.2 F M = 0.05 F M = 0.05 F M = 0.05 F M = 0.2 F M = 0.05 F 2 2 λ τ M = 6000 M = 10000 M = 15000 M = 6000 M = 10000 M = 15000 1 6 τ = 36 1 6 τ = 102 1 6 M = 5000
γ 1 6 M = 0.05 F M = 0.05 F M = 0.2 F M = 0.2 F M = 0.05 F M = 0.05 F M = 0.05 F M = 0.2 F M = 0.05 F 2 2 λ τ M = 6000 M = 10000 M = 15000 M = 6000 M = 10000 M = 15000 1 6 τ = 36 1 6 τ = 102 1 6 M = 5000
Έργο Κινητική Ενέργεια. ΦΥΣ 131 - Διαλ.16 1
 Έργο Κινητική Ενέργεια ΦΥΣ 131 - Διαλ.16 1 Είδη δυνάµεων q Δύο είδη δυνάμεων: Ø Συντηρητικές ή διατηρητικές δυνάμεις και μή συντηρητικές ü Μια δύναμη είναι συντηρητική όταν το έργο που παράγει ασκούμενη
Έργο Κινητική Ενέργεια ΦΥΣ 131 - Διαλ.16 1 Είδη δυνάµεων q Δύο είδη δυνάμεων: Ø Συντηρητικές ή διατηρητικές δυνάμεις και μή συντηρητικές ü Μια δύναμη είναι συντηρητική όταν το έργο που παράγει ασκούμενη
Matematika 4. t x(u)du + 4. e t u y(u)du, t e u t x(u)du + Pismeni ispit, 26. septembar e x2. 2 cos ax dx, a R.
du + 4. e t u y(u)du, t e u t x(u)du + Pismeni ispit, 26. septembar e x2. 2 cos ax dx, a R.") Matematika 4 zadaci sa pro²lih rokova, emineter.wordpress.com Pismeni ispit, 26. jun 25.. Izra unati I(α, β) = 2. Izra unati R ln (α 2 +x 2 ) β 2 +x 2 dx za α, β R. sin x i= (x2 +a i 2 ) dx, gde su a i
Matematika 4 zadaci sa pro²lih rokova, emineter.wordpress.com Pismeni ispit, 26. jun 25.. Izra unati I(α, β) = 2. Izra unati R ln (α 2 +x 2 ) β 2 +x 2 dx za α, β R. sin x i= (x2 +a i 2 ) dx, gde su a i
Εἶναι ἄραγε νεκρός ὁ Εὐκλείδης ;
 Εἶναι ἄραγε νεκρός ὁ Εὐκλείδης ; Γιωργος Σωκρατης.Σ. Σµυρλης 2006 c 2006 Γιῶργος-Σωκράτης.Σ. Σµυρλῆς Η εἰκόνα στό ἐξώφυλλο ἀποτελεῖ ἔργο τοῦ Barnett Newman (1905-1970), τό ὁποῖο ϕέρει τόν τίτλο : The Death
Εἶναι ἄραγε νεκρός ὁ Εὐκλείδης ; Γιωργος Σωκρατης.Σ. Σµυρλης 2006 c 2006 Γιῶργος-Σωκράτης.Σ. Σµυρλῆς Η εἰκόνα στό ἐξώφυλλο ἀποτελεῖ ἔργο τοῦ Barnett Newman (1905-1970), τό ὁποῖο ϕέρει τόν τίτλο : The Death
Matematka 1 Zadaci za drugi kolokvijum
 Matematka Zadaci za drugi kolokvijum 8 Limesi funkcija i neprekidnost 8.. Dokazati po definiciji + + = + = ( ) = + ln( ) = + 8.. Odrediti levi i desni es funkcije u datoj tački f() = sgn, = g() =, = h()
Matematka Zadaci za drugi kolokvijum 8 Limesi funkcija i neprekidnost 8.. Dokazati po definiciji + + = + = ( ) = + ln( ) = + 8.. Odrediti levi i desni es funkcije u datoj tački f() = sgn, = g() =, = h()
ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ Δευτέρα 10 Ιουνίου 2019 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ. (Ενδεικτικές Απαντήσεις)
") ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ Δευτέρα Ιουνίου 9 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ (Ενδεικτικές Απαντήσεις) ΘΕΜΑ Α Αα) Ορισμός σχολικού βιβλίου σελ 5 Έστω Α ένα υποσύνολο
ΠΑΝΕΛΛΑΔΙΚΕΣ ΕΞΕΤΑΣΕΙΣ Γ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ Δευτέρα Ιουνίου 9 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ (Ενδεικτικές Απαντήσεις) ΘΕΜΑ Α Αα) Ορισμός σχολικού βιβλίου σελ 5 Έστω Α ένα υποσύνολο
Funkcija gustoće neprekidne slučajne varijable ima dva bitna svojstva: 1. Nenegativnost: f(x) 0, x R, 2. Normiranost: f(x)dx = 1.
 0, x R, 2. Normiranost: f(x)dx = 1.") σ-algebra skupova Definicija : Neka je Ω neprazan skup i F P(Ω). Familija skupova F je σ-algebra skupova na Ω ako vrijedi:. F, 2. A F A C F, 3. A n, n N} F n N A n F. Borelova σ-algebra Definicija 2: Neka
σ-algebra skupova Definicija : Neka je Ω neprazan skup i F P(Ω). Familija skupova F je σ-algebra skupova na Ω ako vrijedi:. F, 2. A F A C F, 3. A n, n N} F n N A n F. Borelova σ-algebra Definicija 2: Neka
Σύντομη Αναφορά σε Βασικές Έννοιες Ψηφιακής Επεξεργασίας Σημάτων
 Πρόγραμμα Μεταπτυχιακών Σπουδών: «Τεχνολογίες και Συστήματα Ευρυζωνικών Εφαρμογών και Υπηρεσιών» Μάθημα: «Επεξεργασία Ψηφιακού Σήματος και Σχεδιασμός Υλικού» Σύντομη Αναφορά σε Βασικές Έννοιες Ψηφιακής
Πρόγραμμα Μεταπτυχιακών Σπουδών: «Τεχνολογίες και Συστήματα Ευρυζωνικών Εφαρμογών και Υπηρεσιών» Μάθημα: «Επεξεργασία Ψηφιακού Σήματος και Σχεδιασμός Υλικού» Σύντομη Αναφορά σε Βασικές Έννοιες Ψηφιακής
Napisat demo program koji generira funkciju prijenosa G(s)=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz
=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz") LV3 Napisat demo program koji generira funkciju prijenosa G(s)=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz s=tf('s'); Br=2*(s+2);Naz=(s+1)*(s+3); G=Br/Naz s=tf('s'); Br=[2 4];Naz=[1 4
LV3 Napisat demo program koji generira funkciju prijenosa G(s)=(2s+4)/(s2+4s+3) s=tf('s'); Br=2*s+4;Naz=s^2+4*s+3; G=Br/Naz s=tf('s'); Br=2*(s+2);Naz=(s+1)*(s+3); G=Br/Naz s=tf('s'); Br=[2 4];Naz=[1 4
Sistemi veštačke inteligencije primer 1
 Sistemi veštačke inteligencije primer 1 1. Na jeziku predikatskog računa formalizovati rečenice: a) Miloš je slikar. b) Sava nije slikar. c) Svi slikari su umetnici. Uz pomoć metode rezolucije dokazati
Sistemi veštačke inteligencije primer 1 1. Na jeziku predikatskog računa formalizovati rečenice: a) Miloš je slikar. b) Sava nije slikar. c) Svi slikari su umetnici. Uz pomoć metode rezolucije dokazati
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
Odvod. Matematika 1. Gregor Dolinar. Fakulteta za elektrotehniko Univerza v Ljubljani. 5. december Gregor Dolinar Matematika 1
 Matematika 1 Gregor Dolinar Fakulteta za elektrotehniko Univerza v Ljubljani 5. december 2013 Primer Odvajajmo funkcijo f(x) = x x. Diferencial funkcije Spomnimo se, da je funkcija f odvedljiva v točki
Matematika 1 Gregor Dolinar Fakulteta za elektrotehniko Univerza v Ljubljani 5. december 2013 Primer Odvajajmo funkcijo f(x) = x x. Diferencial funkcije Spomnimo se, da je funkcija f odvedljiva v točki
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
SISTEMI AUTOMATSKOG UPRAVLJANJA
 SISTEMI AUTOMATSKOG UPRAVLJANJA Predavanje 3 Modelovanje SAUa u s domenu Ishodi učenja: Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu polove, nule i pojačanje sistema i
SISTEMI AUTOMATSKOG UPRAVLJANJA Predavanje 3 Modelovanje SAUa u s domenu Ishodi učenja: Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu polove, nule i pojačanje sistema i
2. KOLOKVIJ IZ MATEMATIKE 1
 2 cos(3 π 4 ) sin( + π 6 ). 2. Pomoću linearnih transformacija funkcije f nacrtajte graf funkcije g ako je, g() = 2f( + 3) +. 3. Odredite domenu funkcije te odredite f i njenu domenu. log 3 2 + 3 7, 4.
2 cos(3 π 4 ) sin( + π 6 ). 2. Pomoću linearnih transformacija funkcije f nacrtajte graf funkcije g ako je, g() = 2f( + 3) +. 3. Odredite domenu funkcije te odredite f i njenu domenu. log 3 2 + 3 7, 4.
Κεφάλαιο T1. Ταλαντώσεις
 Κεφάλαιο T1 Ταλαντώσεις Ταλαντώσεις και µηχανικά κύµατα Η περιοδική κίνηση είναι η επαναλαµβανόµενη κίνηση ενός σώµατος, το οποίο επιστρέφει σε µια δεδοµένη θέση και µε την ίδια ταχύτητα µετά από ένα σταθερό
Κεφάλαιο T1 Ταλαντώσεις Ταλαντώσεις και µηχανικά κύµατα Η περιοδική κίνηση είναι η επαναλαµβανόµενη κίνηση ενός σώµατος, το οποίο επιστρέφει σε µια δεδοµένη θέση και µε την ίδια ταχύτητα µετά από ένα σταθερό
ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΤΩΝ ΕΞΕΤΑΣΕΩΝ ΤΗΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΣΤΑ ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ
 ΔΕΥΤΕΡΑ 6 28 ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΤΩΝ ΕΞΕΤΑΣΕΩΝ ΤΗΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΣΤΑ ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ Θέμα Α Α Σελίδα 5, ορισμός. β) i. Σελίδα 35, από Έστω...
ΔΕΥΤΕΡΑ 6 28 ΑΠΑΝΤΗΣΕΙΣ ΣΤΑ ΘΕΜΑΤΑ ΤΩΝ ΕΞΕΤΑΣΕΩΝ ΤΗΣ Γ ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΣΤΑ ΜΑΘΗΜΑΤΙΚΑ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ ΚΑΙ ΟΙΚΟΝΟΜΙΑΣ Θέμα Α Α Σελίδα 5, ορισμός. β) i. Σελίδα 35, από Έστω...
Θεωρία Πιθανοτήτων & Στατιστική
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ & Στατιστική Ενότητα 6 η : Θεωρητικές Κατανομές Πιθανότητας για Συνεχή Τυχαία Μεταβλητή. Γεώργιος Ζιούτας Τμήμα Ηλεκτρολόγων Μηχανικών
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ & Στατιστική Ενότητα 6 η : Θεωρητικές Κατανομές Πιθανότητας για Συνεχή Τυχαία Μεταβλητή. Γεώργιος Ζιούτας Τμήμα Ηλεκτρολόγων Μηχανικών
Ακρότατα'Συναρτησιακών'μίας' Συνάρτησης:'Πρόβλημα+ +4α'
 Ακρότατα'Συναρτησιακών'μίας' Συνάρτησης:'Πρόβλημα+ +4α' Τελικόςχρόνοςt f «ελεύθερος»0τελικήτιμήxt f ) «ελεύθερη»:ασυσχετιστα' Ηεύρεσητουακροτάτουσυνάρτηση)γίνεταιμετηνεπίλυσητηςΔιαφ.Εξισ... Εξίσωση'Euler'...καιοισταθερέςολοκληρώσεωςθαπροκύψουναπότηνικανοποίησητων...
Ακρότατα'Συναρτησιακών'μίας' Συνάρτησης:'Πρόβλημα+ +4α' Τελικόςχρόνοςt f «ελεύθερος»0τελικήτιμήxt f ) «ελεύθερη»:ασυσχετιστα' Ηεύρεσητουακροτάτουσυνάρτηση)γίνεταιμετηνεπίλυσητηςΔιαφ.Εξισ... Εξίσωση'Euler'...καιοισταθερέςολοκληρώσεωςθαπροκύψουναπότηνικανοποίησητων...
d dx x 2 = 2x d dx x 3 = 3x 2 d dx x n = nx n 1
 d dx x 2 = 2x d dx x 3 = 3x 2 d dx x n = nx n1 x dx = 1 2 b2 1 2 a2 a b b x 2 dx = 1 a 3 b3 1 3 a3 b x n dx = 1 a n +1 bn +1 1 n +1 an +1 d dx d dx f (x) = 0 f (ax) = a f (ax) lim d dx f (ax) = lim 0 =
d dx x 2 = 2x d dx x 3 = 3x 2 d dx x n = nx n1 x dx = 1 2 b2 1 2 a2 a b b x 2 dx = 1 a 3 b3 1 3 a3 b x n dx = 1 a n +1 bn +1 1 n +1 an +1 d dx d dx f (x) = 0 f (ax) = a f (ax) lim d dx f (ax) = lim 0 =
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Κεθάιαην Επηθακπύιηα θαη Επηθαλεηαθά Οινθιεξώκαηα
 Δπηθακπύιηα Οινθιεξώκαηα Κεθάιαην Επηθακπύιηα θαη Επηθαλεηαθά Οινθιεξώκαηα Επηθακπύιηα Οινθιεξώκαηα θαη εθαξκνγέο. Επηθακπύιην Οινθιήξωκα. Έζηω όηη ε βαζκωηή ζπλάξηεζε f(x,y,z) είλαη νξηζκέλε πάλω ζε κία
Δπηθακπύιηα Οινθιεξώκαηα Κεθάιαην Επηθακπύιηα θαη Επηθαλεηαθά Οινθιεξώκαηα Επηθακπύιηα Οινθιεξώκαηα θαη εθαξκνγέο. Επηθακπύιην Οινθιήξωκα. Έζηω όηη ε βαζκωηή ζπλάξηεζε f(x,y,z) είλαη νξηζκέλε πάλω ζε κία
ΤΜΗΜΑΟΙΚΟΝΟΜΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΠΑΝΕΠΙΣΤΗΜΙΟΠΑΤΡΩΝ ΑΚ. ΕΤΟΣ ΜαθηματικάγιαΟικονομολόγους II-Μάθημα 5 ο -6 ο Όριο-Συνέχεια-Παράγωγος-Διαφορικό
 ΤΜΗΜΑΟΙΚΟΝΟΜΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΠΑΝΕΠΙΣΤΗΜΙΟΠΑΤΡΩΝ ΑΚ. ΕΤΟΣ009-010 ΜαθηματικάγιαΟικονομολόγους II-Μάθημα 5 ο -6 ο Όριο-Συνέχεια-Παράγωγος-Διαφορικό ΟΡΙΣΜΟΣΟΡΙΟΥ Θεωρούμε την συνάρτηση z=f(x,y)/d όπου D ανοικτό
ΤΜΗΜΑΟΙΚΟΝΟΜΙΚΩΝ ΕΠΙΣΤΗΜΩΝ ΠΑΝΕΠΙΣΤΗΜΙΟΠΑΤΡΩΝ ΑΚ. ΕΤΟΣ009-010 ΜαθηματικάγιαΟικονομολόγους II-Μάθημα 5 ο -6 ο Όριο-Συνέχεια-Παράγωγος-Διαφορικό ΟΡΙΣΜΟΣΟΡΙΟΥ Θεωρούμε την συνάρτηση z=f(x,y)/d όπου D ανοικτό
ΕΦΗΜΕΡΙΣ ΤΗΣ ΚΥΒΕΡΝΗΣΕΩΣ
 901 ΕΦΗΜΕΡΙΣ ΤΗΣ ΚΥΒΕΡΝΗΣΕΩΣ ΤΗΣ ΕΛΛΗΝΙΚΗΣ ΔΗΜΟΚΡΑΤΙΑΣ ΤΕΥΧΟΣ ΔΕΥΤΕΡΟ Αρ. Φύλλου 82 27 Ιανουαρίου 2006 ΑΠΟΦΑΣΕΙΣ Αριθμ. 012582 Απόφαση της ΡΑΕ για την έγκριση του Εγχειριδίου Δι αχείρισης Μετρήσεων και
901 ΕΦΗΜΕΡΙΣ ΤΗΣ ΚΥΒΕΡΝΗΣΕΩΣ ΤΗΣ ΕΛΛΗΝΙΚΗΣ ΔΗΜΟΚΡΑΤΙΑΣ ΤΕΥΧΟΣ ΔΕΥΤΕΡΟ Αρ. Φύλλου 82 27 Ιανουαρίου 2006 ΑΠΟΦΑΣΕΙΣ Αριθμ. 012582 Απόφαση της ΡΑΕ για την έγκριση του Εγχειριδίου Δι αχείρισης Μετρήσεων και
ΘΕΩΡΙΑ - ΠΑΡΑ ΕΙΓΜΑΤΑ ΑΝΑΛΥΤΙΚΑ ΛΥΜΕΝΕΣ ΑΣΚΗΣΕΙΣ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ
 ΘΕΩΡΙΑ - ΠΑΡΑ ΕΙΓΜΑΤΑ ΑΝΑΛΥΤΙΚΑ ΛΥΜΕΝΕΣ ΑΣΚΗΣΕΙΣ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΑΘΗΝΑ 996 Πρόλογος Οι σηµειώσεις αυτές γράφτηκαν για τους φοιτητές του Εθνικού Μετσόβιου Πολυτεχνείου και καλύπτουν πλήρως το µάθηµα των
ΘΕΩΡΙΑ - ΠΑΡΑ ΕΙΓΜΑΤΑ ΑΝΑΛΥΤΙΚΑ ΛΥΜΕΝΕΣ ΑΣΚΗΣΕΙΣ ΘΕΜΑΤΑ ΕΞΕΤΑΣΕΩΝ ΑΘΗΝΑ 996 Πρόλογος Οι σηµειώσεις αυτές γράφτηκαν για τους φοιτητές του Εθνικού Μετσόβιου Πολυτεχνείου και καλύπτουν πλήρως το µάθηµα των
Για τον ορισμό της ισχύος θα χρησιμοποιηθεί η παρακάτω διάταξη αποτελούμενη από ένα κύκλωμα Κ και μία πηγή Π:
 1. Ηλεκτρικό ρεύμα Το ηλεκτρικό ρεύμα ορίζεται ως ο ρυθμός μιας συνισταμένης κίνησης φορτίων. Δηλαδή εάν στα άκρα ενός μεταλλικού αγωγού εφαρμοστεί μια διαφορά δυναμικού, τότε το παραγόμενο ηλεκτρικό πεδίο
1. Ηλεκτρικό ρεύμα Το ηλεκτρικό ρεύμα ορίζεται ως ο ρυθμός μιας συνισταμένης κίνησης φορτίων. Δηλαδή εάν στα άκρα ενός μεταλλικού αγωγού εφαρμοστεί μια διαφορά δυναμικού, τότε το παραγόμενο ηλεκτρικό πεδίο
HMY 799 1: Αναγνώριση Συστημάτων
 HMY 799 : Αναγνώριση Συστημάτων Διάλεξη 5 Εκτίμηση φάσματος ισχύος Συνάφεια Παραδείγματα Στοχαστικά Διανύσματα Autoregressive model with exogenous inputs (ARX y( t + a y( t +... + a y( t n = bu( t +...
HMY 799 : Αναγνώριση Συστημάτων Διάλεξη 5 Εκτίμηση φάσματος ισχύος Συνάφεια Παραδείγματα Στοχαστικά Διανύσματα Autoregressive model with exogenous inputs (ARX y( t + a y( t +... + a y( t n = bu( t +...
Πραγματικοί Αριθμοί 2
 Διαφορικός Λογισμός Συναρτήσεις μίας μεταβλητής Όριο και συνέχεια Συνάρτησης Παράγωγος Συνάρτησης o Ιδιότητες παραγώγων o Κανόνες παραγώγισης o Διαφορικό συνάρτησης o Συναρτήσεις με παραμετρική μορφή Βασικά
Διαφορικός Λογισμός Συναρτήσεις μίας μεταβλητής Όριο και συνέχεια Συνάρτησης Παράγωγος Συνάρτησης o Ιδιότητες παραγώγων o Κανόνες παραγώγισης o Διαφορικό συνάρτησης o Συναρτήσεις με παραμετρική μορφή Βασικά
Fakultet tehničkih nauka, Softverske i informacione tehnologije, Matematika 2 KOLOKVIJUM 1. Prezime, ime, br. indeksa:
 Fakultet tehničkih nauka, Softverske i informacione tehnologije, Matematika KOLOKVIJUM 1 Prezime, ime, br. indeksa: 4.7.1 PREDISPITNE OBAVEZE sin + 1 1) lim = ) lim = 3) lim e + ) = + 3 Zaokružiti tačne
Fakultet tehničkih nauka, Softverske i informacione tehnologije, Matematika KOLOKVIJUM 1 Prezime, ime, br. indeksa: 4.7.1 PREDISPITNE OBAVEZE sin + 1 1) lim = ) lim = 3) lim e + ) = + 3 Zaokružiti tačne
Γραφικά περιβάλλοντα από τον χρήστη Graphical User Interfaces (GUI)
") Γραφικά περιβάλλοντα από τον χρήστη Graphical User Interfaces (GUI) Θα γράψουμε το πρώτο μας GUI το οποίο : 1. Θα σχεδιάζει μια συνάρτηση 2. Θα παρέχει κουμπιά για να αλλάζουμε το χρώμα του γραφήματος
Γραφικά περιβάλλοντα από τον χρήστη Graphical User Interfaces (GUI) Θα γράψουμε το πρώτο μας GUI το οποίο : 1. Θα σχεδιάζει μια συνάρτηση 2. Θα παρέχει κουμπιά για να αλλάζουμε το χρώμα του γραφήματος
MATEMATIKA 3. Vera & Rade
 MATEMATIKA 3 Vera & Rade 1. Diferencijalne jednačine prvog reda - osnovni pojmovi Oznake: x - nezavisno promenljiva y - nepoznata funkcija, y = y(x) y = dy dx - izvod funkcije Opšti oblik diferencijalne
MATEMATIKA 3 Vera & Rade 1. Diferencijalne jednačine prvog reda - osnovni pojmovi Oznake: x - nezavisno promenljiva y - nepoznata funkcija, y = y(x) y = dy dx - izvod funkcije Opšti oblik diferencijalne
4. Zapiši Eulerjeve dinamične enačbe za prosto osnosimetrično vrtavko. ω 2
 Mehanikateoretičnavprašanjainodgovori 1/12 Newtonovamehanika 1. Določiravninogibanjatočkevpoljucentralnesile. Ravninagibanjagreskozicentersileinimanormalovsmerivrtilne količine 2. Zapišiperiodogibanjapremočrtnegagibanjapodvplivompotenciala
Mehanikateoretičnavprašanjainodgovori 1/12 Newtonovamehanika 1. Določiravninogibanjatočkevpoljucentralnesile. Ravninagibanjagreskozicentersileinimanormalovsmerivrtilne količine 2. Zapišiperiodogibanjapremočrtnegagibanjapodvplivompotenciala
ΜΑΘΗΜΑΤΙΚΟΣ ΛΟΓΙΣΜΟΣ ΙΙ
 ΜΑΘΗΜΑΤΙΚΟΣ ΛΟΓΙΣΜΟΣ ΙΙ Ακρότατα Δρ. Ιωάννης Ε. Λιβιέρης Τμήμα Μηχανικών Πληροφορικής Τ.Ε. TEI Δυτικής Ελλάδας 2 Ακρότατα συνάρτησης Έστω συνάρτηση f A R 2 R και ένα σημείο P(x, y ) A. Η τιμή f(x, y )
ΜΑΘΗΜΑΤΙΚΟΣ ΛΟΓΙΣΜΟΣ ΙΙ Ακρότατα Δρ. Ιωάννης Ε. Λιβιέρης Τμήμα Μηχανικών Πληροφορικής Τ.Ε. TEI Δυτικής Ελλάδας 2 Ακρότατα συνάρτησης Έστω συνάρτηση f A R 2 R και ένα σημείο P(x, y ) A. Η τιμή f(x, y )
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
2. Η μέθοδος του Euler
 2. Η μέθοδος του Euler Ασκήσεις 2.5 Έστω a = t 0 < t 1 < < t N = b ένας διαμερισμός του [a, b]. Υποθέστε ότι ο διαμερισμός είναι ημιομοιόμορφος, ότι υπάρχει δηλαδή θετική σταθερά µ, ανεξάρτητη του N, τέτοια
2. Η μέθοδος του Euler Ασκήσεις 2.5 Έστω a = t 0 < t 1 < < t N = b ένας διαμερισμός του [a, b]. Υποθέστε ότι ο διαμερισμός είναι ημιομοιόμορφος, ότι υπάρχει δηλαδή θετική σταθερά µ, ανεξάρτητη του N, τέτοια
Πανεπιστήμιο Δυτικής Μακεδονίας. Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών. Ηλεκτρονική Υγεία. Εργαστήριο 10 ο : MATLAB
 Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ηλεκτρονική Υγεία Εργαστήριο 10 ο : MATLAB Αν. καθηγητής Αγγελίδης Παντελής e-mail: paggelidis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
Τμήμα Μηχανικών Πληροφορικής & Τηλεπικοινωνιών Ηλεκτρονική Υγεία Εργαστήριο 10 ο : MATLAB Αν. καθηγητής Αγγελίδης Παντελής e-mail: paggelidis@uowm.gr Τμήμα Μηχανικών Πληροφορικής και Τηλεπικοινωνιών Άδειες
8. Diskretni LTI sistemi
 8. Diskreti LI sistemi. Naloga Določite odziv diskretega LI sistema s podaim odzivom a eoti impulz, a podai vhodi sigal. h[] x[] - - 5 6 7 - - 5 6 7 LI sistem se a vsak eoti impulz δ[] a vhodu odzove z
8. Diskreti LI sistemi. Naloga Določite odziv diskretega LI sistema s podaim odzivom a eoti impulz, a podai vhodi sigal. h[] x[] - - 5 6 7 - - 5 6 7 LI sistem se a vsak eoti impulz δ[] a vhodu odzove z
Φυσική για Μηχανικούς
 Φυσική για Μηχανικούς Μηχανική Εικόνα: Στους αγώνες drag, ο οδηγός θέλει να επιτύχει όσο γίνεται μεγαλύτερη επιτάχυνση. Σε απόσταση περίπου μισού χιλιομέτρου, το όχημα αναπτύσσει ταχύτητες κοντά στα 515
Φυσική για Μηχανικούς Μηχανική Εικόνα: Στους αγώνες drag, ο οδηγός θέλει να επιτύχει όσο γίνεται μεγαλύτερη επιτάχυνση. Σε απόσταση περίπου μισού χιλιομέτρου, το όχημα αναπτύσσει ταχύτητες κοντά στα 515
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
Zavrxni ispit iz Matematiqke analize 1
 Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
A 1 A 2 A 3 B 1 B 2 B 3
 16 0 17 0 17 0 18 0 18 0 19 0 20 A A = A 1 î + A 2 ĵ + A 3ˆk A (x, y, z) r = xî + yĵ + zˆk A B A B B A = A 1 B 1 + A 2 B 2 + A 3 B 3 = A B θ θ A B = ˆn A B θ A B î ĵ ˆk = A 1 A 2 A 3 B 1 B 2 B 3 W = F
16 0 17 0 17 0 18 0 18 0 19 0 20 A A = A 1 î + A 2 ĵ + A 3ˆk A (x, y, z) r = xî + yĵ + zˆk A B A B B A = A 1 B 1 + A 2 B 2 + A 3 B 3 = A B θ θ A B = ˆn A B θ A B î ĵ ˆk = A 1 A 2 A 3 B 1 B 2 B 3 W = F
Ανάλυση υναµικής ιεργασιών
 Ανάλυση υναµικής ιεργασιών Αντιπροσώπευση µε το Μοντέλο Κατάστασης- Χώρου (State-Space Space Models) υναµική Γραµµικών Συστηµάτων 1ης και 2ης Τάξης Συστήµατα SISO και MIMO Ο Μετασχηµατισµός Laplace για
Ανάλυση υναµικής ιεργασιών Αντιπροσώπευση µε το Μοντέλο Κατάστασης- Χώρου (State-Space Space Models) υναµική Γραµµικών Συστηµάτων 1ης και 2ης Τάξης Συστήµατα SISO και MIMO Ο Μετασχηµατισµός Laplace για
σ (t) = (sin t + t cos t) 2 + (cos t t sin t) = t )) 5 = log 1 + r (t) = 2 + e 2t + e 2t = e t + e t
 = (sin t + t cos t) 2 + (cos t t sin t) = t )) 5 = log 1 + r (t) = 2 + e 2t + e 2t = e t + e t") ΛΥΣΕΙΣ. Οι ακήεις από το βιβλίο των Mrsden - Tromb.. 3.)e) Είναι t) sin t + t os t, os t t sin t, 3) οπότε t) sin t + t os t) + os t t sin t) + 3 t + 4 και το μήκος είναι ίο με t t) dt t + 4 dt t + 4 +
ΛΥΣΕΙΣ. Οι ακήεις από το βιβλίο των Mrsden - Tromb.. 3.)e) Είναι t) sin t + t os t, os t t sin t, 3) οπότε t) sin t + t os t) + os t t sin t) + 3 t + 4 και το μήκος είναι ίο με t t) dt t + 4 dt t + 4 +
ΔΙΑΓΩΝΙΣΜΑ ΣΤΑ ΟΛΟΚΛΗΡΩΜΑΤΑ
 ΔΙΑΓΩΝΙΣΜΑ ΣΤΑ ΟΛΟΚΛΗΡΩΜΑΤΑ Θέμα Α) Να δείξετε ότι αν f μια συνάρτηση ορισμένη σε διάστημα Δ και F μια παράγουσα της f στο Δ τότε: α) όλες οι συναρτήσεις της μορφής G(χ) = F ( ) +c, c είναι παράγουσες
ΔΙΑΓΩΝΙΣΜΑ ΣΤΑ ΟΛΟΚΛΗΡΩΜΑΤΑ Θέμα Α) Να δείξετε ότι αν f μια συνάρτηση ορισμένη σε διάστημα Δ και F μια παράγουσα της f στο Δ τότε: α) όλες οι συναρτήσεις της μορφής G(χ) = F ( ) +c, c είναι παράγουσες
Μοντέρνα Θεωρία Ελέγχου
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 1: Μαθηματικά Μοντέλα Συστημάτων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΧΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 1: Μαθηματικά Μοντέλα Συστημάτων Νίκος Καραμπετάκης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative
8 Funkcije više promenljivih
 8 Funkcije više promenljivih 78 8 Funkcije više promenljivih Neka je R skup realnih brojeva i X R n. Jednoznačno preslikavanje f : X R naziva se realna funkcija sa n nezavisno promenljivih čiji je domen
8 Funkcije više promenljivih 78 8 Funkcije više promenljivih Neka je R skup realnih brojeva i X R n. Jednoznačno preslikavanje f : X R naziva se realna funkcija sa n nezavisno promenljivih čiji je domen
Numerička matematika 2. kolokvij (1. srpnja 2009.)
") Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Λογισμός 4 Ενότητα 14
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 14: Το θεώρημα του Green. Μιχ. Γ. Μαριάς Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons.
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 14: Το θεώρημα του Green. Μιχ. Γ. Μαριάς Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons.
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije a + b + c je parabola. Najpre ćemo naučiti kako izgleda
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije a + b + c je parabola. Najpre ćemo naučiti kako izgleda
Poglavlje 7. Blok dijagrami diskretnih sistema
 Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
Μέγιστα & Ελάχιστα. ΗΥ111 Απειροστικός Λογισμός ΙΙ
 ΗΥ-111 Απειροστικός Λογισμός ΙΙ Μέγιστα & Ελάχιστα 1 μεταβλητή: Τύπος Taylor Aν y=f(x) είναι καλή συνάρτηση f '( a) f ''( a) f ( a) f x f a x a x a x a R x 1!! n! n + 1 f ( c) n + 1 Rn ( x) = ( x a), a
ΗΥ-111 Απειροστικός Λογισμός ΙΙ Μέγιστα & Ελάχιστα 1 μεταβλητή: Τύπος Taylor Aν y=f(x) είναι καλή συνάρτηση f '( a) f ''( a) f ( a) f x f a x a x a x a R x 1!! n! n + 1 f ( c) n + 1 Rn ( x) = ( x a), a
Ηλεκτρονικοί Υπολογιστές IV
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ηλεκτρονικοί Υπολογιστές IV Εισαγωγή στα δυναμικά συστήματα Διδάσκων: Επίκουρος Καθηγητής Αθανάσιος Σταυρακούδης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΪΚΑ ΜΑΘΗΜΑΤΑ Ηλεκτρονικοί Υπολογιστές IV Εισαγωγή στα δυναμικά συστήματα Διδάσκων: Επίκουρος Καθηγητής Αθανάσιος Σταυρακούδης Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό
Apì ton diakritì kôbo ston q ro tou Gauss
 Apì ton diaritì Ôbo ston q ro tou Gauss 1 Isoperimetri anisìthta sto diaritì Ôbo Θεωρούμε την οικογένεια J των συναρτήσεων J : [0 1] [0 ) που ικανοποιούν τα εξής: J0) = J1) = 0. Για κάθε a b [0 1] a +
Apì ton diaritì Ôbo ston q ro tou Gauss 1 Isoperimetri anisìthta sto diaritì Ôbo Θεωρούμε την οικογένεια J των συναρτήσεων J : [0 1] [0 ) που ικανοποιούν τα εξής: J0) = J1) = 0. Για κάθε a b [0 1] a +
(Σχολικό βιβλίο, σελ. 71)
") ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Γ' ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ 0 ΙΟΥΝΙΟΥ 09 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΜΑΘΗΜΑΤΙΚΑ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ & ΣΠΟΥΔΩΝ ΟΙΚΟΝΟΜΙΑΣ & ΠΛΗΡ/ΚΗΣ ΑΠΑΝΤΗΣΕΙΣ ΕΠΙΜΕΛΕΙΑ: ΟΜΑΔΑ ΚΑΘΗΓΗΤΩΝ ΦΡΟΝΤΙΣΤΗΡΙΟΥ
ΠΑΝΕΛΛΗΝΙΕΣ ΕΞΕΤΑΣΕΙΣ Γ' ΤΑΞΗΣ ΗΜΕΡΗΣΙΟΥ ΓΕΝΙΚΟΥ ΛΥΚΕΙΟΥ ΔΕΥΤΕΡΑ 0 ΙΟΥΝΙΟΥ 09 ΕΞΕΤΑΖΟΜΕΝΟ ΜΑΘΗΜΑ: ΜΑΘΗΜΑΤΙΚΑ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ & ΣΠΟΥΔΩΝ ΟΙΚΟΝΟΜΙΑΣ & ΠΛΗΡ/ΚΗΣ ΑΠΑΝΤΗΣΕΙΣ ΕΠΙΜΕΛΕΙΑ: ΟΜΑΔΑ ΚΑΘΗΓΗΤΩΝ ΦΡΟΝΤΙΣΤΗΡΙΟΥ
Λύσεις μερικών ασκήσεων του τέταρτου φυλλαδίου.
 Λύσεις μερικών ασκήσεων του τέταρτου φυλλαδίου.. Βρείτε τον μετασχηματισμό Fourier της συνάρτησης x, αν x xχ [,] (x) =, αν x < ή < x Λύση. Εειδή η συνάρτηση είναι τμηματικά συνεχής και μηδενίζεται έξω
Λύσεις μερικών ασκήσεων του τέταρτου φυλλαδίου.. Βρείτε τον μετασχηματισμό Fourier της συνάρτησης x, αν x xχ [,] (x) =, αν x < ή < x Λύση. Εειδή η συνάρτηση είναι τμηματικά συνεχής και μηδενίζεται έξω
Introducción a la dinámica estructural por el MEF. Propiedades de inercia de los elementos
 Introducción a la dinámica structural por l MEF Propidads d inrcia d los lmntos Principios nrgéticos n dinámica Furzas d olumn Furzas d suprfici Furzas d inrcia q IN q q s q ρu x INx = q = ρu = ρu INy
Introducción a la dinámica structural por l MEF Propidads d inrcia d los lmntos Principios nrgéticos n dinámica Furzas d olumn Furzas d suprfici Furzas d inrcia q IN q q s q ρu x INx = q = ρu = ρu INy
Δείκτες Poincaré και Θεώρημα Frommer
 Δείκτες Poinaré και Θεώρημα Frommer Ζαφειράκογλου Απόστολος 1 Θεωρητική εισαγωγή Στη διαφορική γεωμετρία, ως απόλυτη καμπυλότητα ορίζουμε το ολοκλήρωμα μια επίπεδης καμπύλης, θεωρώντας απειροστή διαμέριση
Δείκτες Poinaré και Θεώρημα Frommer Ζαφειράκογλου Απόστολος 1 Θεωρητική εισαγωγή Στη διαφορική γεωμετρία, ως απόλυτη καμπυλότητα ορίζουμε το ολοκλήρωμα μια επίπεδης καμπύλης, θεωρώντας απειροστή διαμέριση
Digitalni sistemi automatskog upravljanja
 Digitalni sistemi automatskog upravljanja Upotreba digitalnih računara u ulozi kompenzatora i regulatora, u poslednje dve decenije naglo raste. To je posledica rasta njihovih performansi i pouzdanosti,
Digitalni sistemi automatskog upravljanja Upotreba digitalnih računara u ulozi kompenzatora i regulatora, u poslednje dve decenije naglo raste. To je posledica rasta njihovih performansi i pouzdanosti,
0.8 Επικαµπύλια ολοκληρώµατα
 0.8 Επικαµπύλια ολοκληρώµατα. Έστω η καµπύλη = ( r = r( t) = ( t, t,ln t), t > 0). Να ευρεθεί το µήκος της µεταξύ των σηµείων A = (,, 0) και B = (4,4,ln ). Έχουµε r () t = (,, t ) ( t > 0). Άρα το µήκος
0.8 Επικαµπύλια ολοκληρώµατα. Έστω η καµπύλη = ( r = r( t) = ( t, t,ln t), t > 0). Να ευρεθεί το µήκος της µεταξύ των σηµείων A = (,, 0) και B = (4,4,ln ). Έχουµε r () t = (,, t ) ( t > 0). Άρα το µήκος
Prvi kolokvijum. y 4 dy = 0. Drugi kolokvijum. Treći kolokvijum
 27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
SISTEMI AUTOMATSKOG UPRAVLJANJA
 SISTEMI AUTOMATSKOG UPRAVLJANJA Ishodi učenja: Predavanje 4 Prostor stanja: jednačine kretanja i Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu fundamentalnu matricu sistema
SISTEMI AUTOMATSKOG UPRAVLJANJA Ishodi učenja: Predavanje 4 Prostor stanja: jednačine kretanja i Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu fundamentalnu matricu sistema
Διακριτός Μετασχηματισμός Fourier
 Διακριτός Μετασχηματισμός Fourier 1 Διακριτός Μετασχηματισμός Fourier Ο μετασχηματισμός Fourier αποτελεί τον ακρογωνιαίο λίθο της επεξεργασίας σήματος αλλά και συχνή αιτία πονοκεφάλου για όσους πρωτοασχολούνται
Διακριτός Μετασχηματισμός Fourier 1 Διακριτός Μετασχηματισμός Fourier Ο μετασχηματισμός Fourier αποτελεί τον ακρογωνιαίο λίθο της επεξεργασίας σήματος αλλά και συχνή αιτία πονοκεφάλου για όσους πρωτοασχολούνται
ΜΑΘΗΜΑ ΕΞΕΤΑΖΟΜΕΝΗ ΥΛΗ
 ΜΑΘΜΑ ΕΞΕΤΑΖΟΜΕΝ ΥΛ ΜΑΘΜΑΤΙΚΑ Γ ΛΥΚΕΙΟΥ /6/9 ΛΥΣΕΙΣ ΠΑΝΕΛΛΑΔΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΘΕΜΑ Α Α α) Σχολικό βιβλίο σελίδα 5 β) i) Σχολικό βιβλίο σελίδα 5 ii) Σχολικό βιβλίο σελίδα 5-6 Α Σχολικό βιβλίο σελίδα 4 Α Σχολικό
ΜΑΘΜΑ ΕΞΕΤΑΖΟΜΕΝ ΥΛ ΜΑΘΜΑΤΙΚΑ Γ ΛΥΚΕΙΟΥ /6/9 ΛΥΣΕΙΣ ΠΑΝΕΛΛΑΔΙΚΩΝ ΕΞΕΤΑΣΕΩΝ ΘΕΜΑ Α Α α) Σχολικό βιβλίο σελίδα 5 β) i) Σχολικό βιβλίο σελίδα 5 ii) Σχολικό βιβλίο σελίδα 5-6 Α Σχολικό βιβλίο σελίδα 4 Α Σχολικό
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ
 ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 3 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α 1. γ.. β. 3. δ. 4. β. 5. α-λ, β-λ, γ-λ, δ-σ, ε-σ. ΘΕΜΑ B 1. Σωστή απάντηση είναι η (α). Η εξίσωση της φάσης ενός
ΦΥΣΙΚΗ ΟΜΑΔΑΣ ΠΡΟΣΑΝΑΤΟΛΙΣΜΟΥ ΘΕΤΙΚΩΝ ΣΠΟΥΔΩΝ 3 ο ΔΙΑΓΩΝΙΣΜΑ ΕΝΔΕΙΚΤΙΚΕΣ ΑΠΑΝΤΗΣΕΙΣ ΘΕΜΑ Α 1. γ.. β. 3. δ. 4. β. 5. α-λ, β-λ, γ-λ, δ-σ, ε-σ. ΘΕΜΑ B 1. Σωστή απάντηση είναι η (α). Η εξίσωση της φάσης ενός
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
1.4 Tangenta i normala
 28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x