1. INTRODUCERE Ce ar trebui să ne reamintim
|
|
|
- Ζωή Πρωτονοτάριος
- 7 χρόνια πριν
- Προβολές:
Transcript
1 . INTRDUCERE.. Ce r trebui să ne remintim Mecnic Teoretică pote fi împărţită după ntur problemei ce se studiză în trei părţi. Aceste coincid cu ordine de priţie şi de dezvoltre Mecnicii: Sttic re c obiective: studiul condiţiilor de echivlenţă sistemelor de forţe şi respectiv, studiul stării de repus sistemelor de puncte mterile flte sub cţiune sistemelor de forţe echivlente cu zero (în echilibru). Cinemtic studiză mişcre corpurilor fără să ţină sem de forţele cre cţioneză supr lor. Se mi spune că cinemtic studiză de fpt geometri mişcării. Dinmic se ocupă cu studiul mişcării corpurilor sub cţiune forţelor. Un lucru este cert: se lucreză cu vectori şi este indict să recpitulăm operţiile cu ceşti (vezi ne A). În următorele două cpitole se vor studi metode pentru compunere forţelor cre cţioneză supr unui punct mteril. Se pune problem de înlocui sistemul de forţe dt cu o forţă unică numită rezultntă, cre să ibă celşi efect cu efectul simultn l tuturor forţelor sistemului. Acestă operţie de reducere unui sistem de forţe concurente l cel mi simplu sistem echivlent - rezultnt, este cunoscută c operţie de compunere su de sumre forţelor. Două sisteme de forţe concurente sunt echivlente dcă u ceeşi rezultntă c mărime şi poziţie, în rport cu celşi sistem de referinţă. Din cele rătte se înţelege că operţiile cu vectori şi cele noţiuni de mtemtică elementră din geometri plnă şi trigonometrie trebuie să fie cunoscute suficient de bine. Condiţi de învinge dificultăţile de ordin mtemtic (cre sunt uneori inerente l început de drum) este obligtorie. Stisfcţiile gustte de viitorul inginer se vor mteriliz încet dr sigur, chir pe măsur prcurgerii cestei cărţi, şi cu sigurnţă l disciplinele următore de studiu.
2 6 Complemente de Mecnică.. Rezolvre problemelor şi grdul de precizie Aplicţiile demonstrtive cât şi cele propuse pentru rezolvre implică din prte studentului prcurgere următorelor etpe: ) Citire cu deosebită tenţie enunţului problemei, înţelegere semnificţiei fenomenului fizic şi scriere clră elementelor dte şi celor cerute. ) Desenre unor scheme su digrme etrem de utile rezolvării. 3) Rezolvre numerică, clculele fiind efectute cu tâte zecimle câte sunt necesre pentru interpretre corectă dtelor de intrre. 4) Rezulttele se interpreteză, verificându-se mi întâi dcă u sens, poi desenând su stbilind orice concluzie cre pote fi trsă de pe urm lor. Utile pot fi şi prticulrizările cre evidenţiză fenomene mi simple decât cele studite, ceste fiind mi uşor de imgint. Referitor l grdul de precizie din plicţiile numerice, se vor utiliz în generl trei cifre semnifictive c de eemplu: g = 9,8m/s, π = 3,4,, 3=,73, sin(π/4) = / = 0,707 etc. În cest contet, o msă de m=4 kg, de fpt se v scrie în rezolvre cu vlore 4,00 kg..3. Cele ptru czuri de rezolvre triunghiurilor Pentru determinre tuturor elementelor unui triunghi orecre (lturi şi unghiuri) trebuie să fie dte trei elemente (din cre cel puţin o ltură) şi rămân de flt celellte trei. Astfel eistă următorele vrinte în cee ce priveşte elementele cre se cunosc: o ltură şi două unghiuri; două lturi şi un unghi opus unei din lturi su formt de ceste; trei lturi. Metodele de rezolvre pentru ceste czuri sunt prezentte în continure.
3 Introducere 7 A) Se du două unghiuri şi o ltură. Deorece sum unghiurilor unui triunghi este 80º, se flă şi cel de-l treile unghi. Lturile necunoscute se găsesc plicând teorem sinusurilor, de eemplu fiind dte c, α, β, obţinem sinα γ = 80º (α+β), = c şi sinγ sin β b = c. (.) sinγ Eemplu: se cunosc c = 0cm, α =5º şi β =40º (fig..). Se clculeză: A C b 5º 40º c=0 Fig.... γ = 80º (5º+40º) = 5º sin 5 0,46 B. = 0 = 0 = 3, 5cm sin 40 0,648 sin 40 0, b = 0 = 0 = 4, 8cm sin5 0,9063 B) Se du două lturi şi unghiul opus unei dintre ele. Fie, c şi γ elementele cunoscute. bţinem: sinα = sinγ ; c β = 80 - ( α + γ ); b = c sin β sinγ În mod evident, între elementele dte trebuie să eiste următore condiţie: c sinγ De ici se consttă că sunt posibile următorele trei czuri: (.) (.3) B.. < c, unghiul dt fiind opus lturii mi mri. Atunci eistă un unghi α mi mic dect γ, opus lturii mi mici cre v fi les dintre unghiurile α şi α, α + α = 80º. Soluţi unică v fi α < γ.
4 8 Complemente de Mecnică Eemplu: = 5cm, c = 6cm, γ =45º. Etpele de rezolvre sunt următorele: 5 sin α = sinγ = sin 45 = c 6 α = 36 06' 5"; α = 80 α = 43 53'45" α = α este mi mre decât γ (vezi fig..). A. β = 80 ( α + γ ); β = 98 53'45" ; ; sin β sin98 53'45" 3. b = c = 6 ; b = 8,38cm. sinγ sin 45 b=8,38 98º54 36º6 c=6 45º Fig... C =5 B B.. = c, triunghiul este isoscel, deci α = γ. B.3. > c, unghiul dt este opus lturii mi mici, ir segmentul pote fi tât de mre încât condiţi sinα să nu fie verifictă. Detliem următorele subczuri: B.3.. Nu eistă soluţie; nu se pote construi un triunghi cu elementele dte. Eemplu: se cunosc = cm, c = cm, γ =45º. sin α = sinγ = sin 45 = =,4 >. Prin urmre nu eistă soluţii. Dcă c unghiul γ r ve vlori cre să nu depăşescă 30º, tunci problem r ve soluţii. B.3.. sinα v fi egl cu, α v fi un unghi drept, deorece α =80 α = =α. Triunghiul fiind dreptunghic, problem re două soluţii confundte. Eemplu: se cunosc b = cm, c = cm şi γ =30º (fig..3). B c= A 90º 30º b= Fig..3. C
5 Introducere 9 B.3.3. Dcă sinα <, se obţin soluţiile α şi α = 80 α. Deorece sinα > sinγ, vem α > γ şi (80 α )+γ < 80, deci şi α verifică condiţiile. Problem re două soluţii distincte. A α c =6 Eemplu: = 7cm c = 6cm γ =30º. 7. sin α = sin γ = sin 30 = c 6 α = 35 4'; sin β sin4 9' 3. b = c = 6 ; b = 0,94cm sinγ sin 30 b α A sin β sin5 4' = c = 6 ; b sinγ sin30 = α β = 80 α = α γ = 5,9cm. = 44 9' B =7 30 C Fig..4.. β = 80 ( α + γ ); β = 4 9' ;; 4' C) Se du două lturi şi unghiul cuprins între ele. Se cunosc de eemplu b, c şi α. rezolvre se pote fce pe două căi, plicând teorem cosinusului su teorem tngentei: = b +c bc cosα = b + c - bc cos α. Unghiul β pote fi stbilit din teorem cosinusului, c + b cos β = su din teorem sinusurilor c b sin β = sinα. Se obţin două vlori pentru unghiul β, dr numi un este corespunzătore din punct de vedere geometric. Din teorem tngentei şi din relţi β + γ α = 90 β γ b c β + γ obţinem tg = tg, b + c β + γ ; din şi
6 0 Complemente de Mecnică β γ se stbilesc β şi γ. A trei ltură c se flă din teorem sinusurilor, sin γ c =. sinα Eemplu: = 5km, c = 7,5km, β = 56 cm. Rezolvre se v fce cu teorem tngentei: γ + α = 80 β = 4 ; γ α c γ + α γ α tg = tg = 0,3765. Se obţine = 0 36'49", şi deci c + γ = 8 36'49", α = 4 3' ". Prob: α + β + γ = 80. sin b = sin β α = 6,70 km. Verificre cu teorem cosinusului: b = + c ccos β = 6, 70 km. D) Se du tote lturile triunghiului. Soluţi se flă prin teorem cosinusului su prin formulele de eprimre le unghiurilor în funcţie de de lturi: b + c cosα = su bc α tg = ( s b)( s c) s( s ). Prin permutări circulre se obţin şi vlorile unghiurilor β şi γ. bservăm că soluţiile se pot găsi fie din combinţiile convenbile şse numere, b, c, b, bc, c su ptru numere s, s-, s-b, s-c. Verificre rezulttelor se fce cu jutorul sumei unghiurilor unui triunghi. Eemplu: = 4cm, b = 5cm, c = 6cm. ) Rezolvre cu teorem cosinusului: = 6 b = 5 c = 36 b = 40 bc = 60 c = 48 b + c = 45 cosα = 0,7500 α = c + b = 7 cosβ = 0,565 β = b c = 5 cosγ = 0,50 γ = α+β +γ =80º00 00
7 Introducere b) Rezolvre cu formulele tngentei: s = 7,50 s = 3,50 s b =,50 s c =,50 α tg = β tg = γ tg = 0, ,595 0, Aplicţii α / = 0,7048 α = β / = 7,88557 β = γ / =37,87498 γ = Un fulger fost văzut sub un unghi α de 60º fţă de terenul considert orizontl şi fost uzit tunetul l un intervl de timp t = 4,5 secunde de l producere. Să se fle distnţ şi respectiv înălţime l cre s- produs, cunoscând vitez de propgre sunetului de v = 334m/s. Timpul de propgre luminii se neglijeză, vitez luminii fiind de km/s. h α d Fig..5. REZLVARE: Se noteză cu d distnţ de l observtor până l sursă şi cu h înălţime cerută. Din figur.5 se stbilesc: d = vt = 334 4,5 = 503,0 m. h = d sinα = vt sinα = 30,6 m... Distnţ dintre ele două roţi vând rzele r şi R =,5r (fig.6), este = 4,5r. Să se clculeze lungime unei curele de trnsmisie cre ntreneză cele două roţi, presupunând că cest este perfect întinsă,. REZLVARE: Triunghiul ABC este dreptunghic în A. Se cunoşte ipotenuz BC = şi ctet AB = R r. Conform teoremei lui Pitgor, ctet AC se clculeză: t = (R r), s C r t Fig..6. A B α R S t = 4,47 r; cosα = (R r)/ = /9 = 0, α =,459 rd. Cureu este înfăşurtă pe rot mică pe un rc de lungime s = rα, ir pe rot mre pe lungime S = R(π - α). Lungime totlă curelei este L = t + s + S = 6,909 r.
8 Complemente de Mecnică.3. Din două puncte A şi B se măsoră cu un teodolit unghiurile α = 30 şi β = spre un reper C. Să se fle înălţime h = CD l cre se găseşte reperul fţă de orizontlă, cunoscând AB=00m. REZLVARE: Se plică teorem sinusurilor, poi se clculeză h din triunghiul dreptunghic ADC (fig..7): γ C. γ =β α = 8 sinα sin30. BC = AB = 00 = 6,803 m sinγ sin8 3. h = CD = BC sinβ = 6,803 sin 8 = 33,60 m. A α B β Fig..7. D.4. Din două puncte A şi B flte pe o pntă de unghi β = 0 se măso-ră unghiurile α = 35 şi γ = 40 spre un reper C (fig..8). Să se fle înălţime h l cre se găseşte reperul fţă de orizontl punctului A, ştiind lungime AB=50m. A α γ α ε γ β B Fig.. 8. C h D REZLVARE: În triunghiul ABC se plică teorem sinusurilor, poi se clculeză h: sinε. ε = 80 γ +β = 50 ;. AC = AB ; sin( γ α) sinε sinα 3. h = AC sin α = AB = 493,579 m sin( γ α).5. În triunghiul orecre ABC se cunosc: = m, β = 45 şi γ = 60. Să se fle celellte elemente le triunghiului. Răspuns: ) α= 75º ) b= sinβ/sin α =,464 m şi 3º) c = sinγ/sin α =.,793 m.6. Să se rezolve triunghiul orecre ABC cre re lturile = m, b = 3 m şi unghiul dintre ceste γ = 30. Răspuns: Se construieşte mi întâi triunghiul. ) c =,65 m, ) sinα = 0,696, α = 38º5 43, 3º) sinβ =0,9889, β = 68º5 43 (nu convine), β = º Triunghiul isoscel ABC re lturile = 6 m, b=c= 5 m. Să se fle unghiurile sle. Răspuns: ) cosα = 0,8000, α=73º44 4 ) cosβ = cosγ = 0,60000, β = γ =36º5.
9 . METDA GEMETRICĂ DE CMPUNERE A FRŢELR.. Regul prlelogrmului Problem compunerii două forţe F şi F cunoscute, cţionând supr unui punct mteril M este rezolvtă de regul prlelogrmului forţelor F + F = R (fig... ). Notând cu α unghiul dintre F şi F, mărime rezultntei R se clculeză plicând teorem cosinusului în triunghiul MA B: R = F + F FF cos( ) = F + F + FF cos π α α (.) Pentru fre direcţiei rezultntei, deci unghiurilor β şi γ, se plică teorem sinusurilor în celşi triunghi şi se obţine relţi: F F R = = (.) sin γ sin β sin α B B B F R = F + F γ F R = F + F γ F M α β F A M Fig... β F b A α Compunere forţelor concurente este prim operţie elementră de echivlenţă sistemelor de forţe. BSERVAŢIE: Rezultnt se pote obţine plicând regul triunghiului forţelor, echivlentă cu regul prlelogrmului. Pe bz cestei reguli se construieşte în etremitte forţei F un vector F ' echipolent (prlel, de celşi sens şi egl) cu forţ F. Rezultnt R este vectorul cre re ceişi origine cu origine forţei F şi etremitte, în etremitte forţei F (fig... b).
10 4 Complemente de Mecnică Simpo PDF Pssword Remover Unregistered Version - Dcă punctul mteril M este cţiont de n forţe, se plică succesiv regul prlelogrmului, de n- ori, compunând primele două forţe F şi F, poi rezultnt cestor R cu trei forţă F 3, obţinând rezultnt R 3, şi ş mi deprte: F n + F + F3 +! + Fn = Fi = R + F3 +! + Fn = R3 + F4 +! + Fn = i= R (.3) În figur., se eemplifică procedeul pentru 4 forţe. Aplicând succesiv regul triunghiului, se junge l construcţi cunoscută sub numele de poligonul forţelor, cu cre se determină rezultnt. Lturile poligonului sunt reprezentte de vectori echipolenţi cu forţele concurente, rezultnt unind origine primei forţe cu etremitte ultimului vector echipolent (fig.., b). Atunci când metod geometrică se plică sub form unei construcţii grfice, relizând poligonul forţelor l scră, cest se numeşte metod grfică compunerii forţelor concurente, metodă l cărui rezultt este proimtiv, depinzând de precizi construcţiei grfice. R = R 4 F 4 F 3 R F 4 F 4 M F 3 F R R 3 M F F 3 F b Fig... BSERVAŢIE: Dcă poligonul forţelor este închis, dică etremitte vectorului echipolent cu ultim forţă din poligon coincide cu origine primei forţe, tunci rezultnt este nulă şi sistemul de forţe concurente se numeşte sistem echivlent cu zero. F F
11 Metod geometrică de compunere forţelor 5 Simpo PDF Pssword Remover Unregistered Version - Aplicţii.. Folosind metod geometrică, să se rte că operţi de compunere forţelor concurente din figur.3 este comuttivă: F + F = F + F REZLVARE: Se plică de două ori regul triunghiului, obţinându-se de fiecre dtă c rezultntă digonl prlelogrmului celor două forţe (fig..3, b şi c). M F ϕ F A ϕ R = F + F F M b A.. Folosind metod geometrică, să se rte că operţi de compunere forţelor concurente din figur.4 este socitivă ' F Fig..3. B F M A R = F + F ϕ c F A B F + ( + = + + F. F F3 ) ( F F ) 3 F F 3 M Fig..4. F REZLVARE: Construind poligonul forţelor F, F şi F 3, se stbileşte mi întâi sum + ) (fig..5 ), F ( F + F3 ( F + F + F (fig..5 b), rezultnt R poi sum 3 fiind ltur MA celuişi contur poligonl MA A. A3 ) A 3 F 3 A 3 F 3 R=F +(F+F3) F + ' ' F 3 F A F A R=(F+F)+F3 F + F ' M M Fig..5. b F A F A
12 6 Complemente de Mecnică Simpo PDF Pssword Remover Unregistered Version - Să se clculeze rezultnt două forţe F =00 N şi F =80 N, ştiind că tngent unghiului dintre ele este 4/3. Să se fle direcţi rezultntei prin două metode: ) cu teorem sinusurilor; b) utilizând proiecţiile rezultntei pe ele de coordonte. REZLVARE: Figur., b corespunde enunţului problemei, forţele formând un triunghi MA B. Se clculeză mi întâi cosinusul unghiului α, funcţie de vlore tngentei, pentru plic relţi (.): cosα = + tg = α R = F + F + F F cosα = ,60 = 56 = 34 N ) Direcţi rezultntei este dtă de unghiul β, cre se stbileşte din teorem sinusurilor (.) scrisă pentru celşi triunghi MA B. F sin β = sinα = R = 3 5 = β = rcsin(0.435) = 5 b) A dou metodă identifică proiecţiile rezultntei X si Y, respectiv pe ele si, le sistemului (fig..6): X Y = = F F + F cosα = ,60 = 30,80 sinα = 8 0,80 = 4,40 Y 4,40 tg β = = = X 30,80 β = rctg(0,4675) = 5 B M β X R F γ F A α Y Fig..6.
13 Metod geometrică de compunere forţelor 7 Simpo PDF Pssword Remover Unregistered Version - Să se clculeze mărime rezultntei şi direcţi pe cre o fce cest cu, cunoscând forţele F şi F din figurile.7 şi.8. Răspuns: R= 4,9 N; -43,9º şi R= 36, N; 73,9º. F = 8 N F = 40 N 30º F = 0 N 0º F = 30 N Fig..7. Fig Cunoscând mărimile forţelor F = F 3 = F / = 0 N (fig..9, ), să se determine ce de- ptr forţă, stfel încât rezultnt lor să fie nulă. REZLVARE: Condiţi c rezultnt să fie nulă (dică sistemul celor ptru forţe concurente să fie echivlent cu zero) este cee c poligonul lor să fie închis. Din construcţi cestui poligon se observă că forţ F 4 este orizontlă (fig..9 b). Mărime cestei se clculeză prcurgând următorul rţionment: forţele F şi F 3 determină două lturi le unui triunghi echilterl, rezultnt prţilă fiind ce de- trei ltură (orizontlă), deci R 3 = 0 N; F este coliniră şi de celşi sens cu R 3, şi tunci mărime forţei F 4 = F + R 3 = 30 N. F A A 60º F A 3 F 60º F 3 ' 0º F ' F 3 F 4 ' A 5 A 4 Fig..9. b
14 8 Complemente de Mecnică Simpo PDF Pssword Remover Unregistered Version - F 30º F 60º 60º F 3 F B A 30º F ' 30º ' F 4 30º A α ' F 3 A 3 Fig..0. b.6. Cunoscând mărimile forţelor F = 0 N, F = F 3 = 34,64 N (fig..0, ), să se determine forţ F 4, stfel încât rezultnt lor să fie nulă. REZLVARE: Se reprezintă poligonul celor trei forţe dte şi se închide cu ce de- ptr (fig..0 b). Forţele F şi F 3 formeză un triunghi isoscel A A A 3 vând bz A A 3 = F cos30º=60 N. Mărime forţei F 4 este stbilită din triunghiul dreptunghic BA 3 : F 4 = B + A B 3 = ( F cos30 ) + ( F sin 30 + F cos30 ) = = 0 3 = 7,N Din celşi triunghi dreptunghic BA 3 se clculeză B 3 tgα = = = 0,4949 α = 6,3 A B Să se clculeze mărime rezultntei celor două forţe F şi F din figur..,b,c, precum şi unghiul pe cre cest îl fce cu forţ F, ştiind că forţele sunt reprezentte l scră: forţ reprezenttă pe o ltură octogonului măsoră 0,00 N. Răspuns: ) R= 53,05 N;,50º b) R= 3,00 N;,76º şi c) R= 6,3 N;,50º. 45 F F 45 F F 90 F F Fig... b c

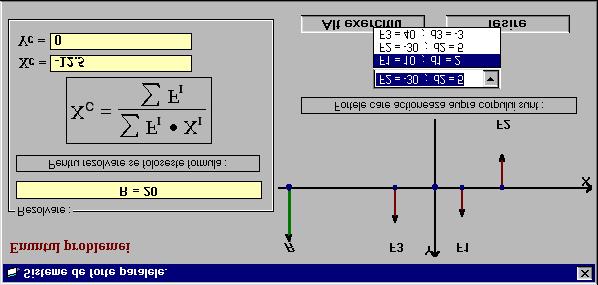
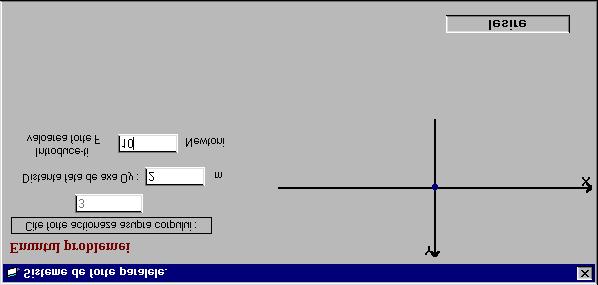
15 Metod geometrică de compunere forţelor 9 Simpo PDF Pssword Remover Unregistered Version - Formă interctivă de studiu individul biectiv: plicre regulii prlelogrmului pentru diferite vlori le forţelor cu vriţi unghiului dintre ceste. Specific: prim forţă este considertă coliniră cu. Mărimile forţelor pot ve vlori bsolute între şi 00, ltfel progrmul nunţă erore. Unghiul α este pozitiv în sens ntiorr. Eerciţiu: se introduc dtele din problem.4 (fig..8.) şi se verifică rezulttul obţinut ( vezi figur.). Pentru clritte prezentării desenului, se selecteză în ferestr Scră desen, dimensiune Mediu. Trecere l ltă plicţie se fce ctionând butonul Alt eerciţiu. Se introduc noile dte pentru forţe şi unghi. Alte două eemple sunt prezentte în figurile.3 şi.4. bservţie: schem forţelor este reprezenttă mereu l scră, eistând şi posibilitte mplificării desenului. pţiunile posibile: norml, mediu, mre, super (vezi figur.4). Fig..
16 0 Complemente de Mecnică Simpo PDF Pssword Remover Unregistered Version - Fig..3 Fig..4
17 3. METDA ANALITICĂ DE CMPUNERE A FRŢELR 3.. Proiecţiile şi componentele unei forţe Forţ este o mărime vectorilă su, pe scurt, un vector. Un vector se crcterizeză complet prin mărime, direcţie, sens şi punct de plicţie.vectorul vând mărime eglă cu unitte, se numeşte versor. Versorii elor şi se noteză cu i şi j. Prin definiţie, se numeşte proiecţi unei forţe pe o ă produsul sclr dintre forţă şi versorul ei respective. Spre eemplu, proiecţi forţei F, pe este X şi se clculeză: X = F i = F cosα (3.) în cre s- nott cu F intensitte (modulul su mărime) forţei şi cu α unghiul formt de o direcţie prlelă cu şi direcţi forţei (fig.3.). Proiecţi unei forţe pe o ă este o mărime lgebrică sclră l cărui semn se determină după orientre vectorului fţă de ă. În figur 3.,, b, c, proiecţi X este pozitivă, nulă şi respectiv negtivă. Y M β α X > 0 F X= F cosα α=π/ b c Fig. 3.. Component unei forţe după o ă este mărime vectorilă eglă cu produsul dintre proiecţi forţei pe ă şi versorul ei i (fig.3.) : Y F X = 0 X = Xi = F cosα i (3.) Y M M F X < 0
18 Complemente de Mecnică F Utilizând proiecţiile forţei pe e, epresi nlitică vectorului forţei este: F = X i + Y j (3.3) ir modulul forţei re epresi: F = X + Y (3.4) Direcţi forţei fţă de ele sistemului de referinţă este dtă de unghiurile α şi β, cre se clculeză din relţi de definiţie proiecţiei unei forţe pe o ă: cos α = X Y ; cos β = sin α = (3.5) F F denumite cosinusuri directore între cre eistă relţi evidentă: 3.. Aplicţie cos α + cos β = (3.6) 3.. Presupunând că forţ F = 00N re pe rând direcţi cului orr l unui ces cre rtă orele: douăsprezece, două, ptru, şpte şi zece, să se descompună cestă forţă în componente (după direcţi orizontlă şi verticlă) şi să se scrie epresi forţei sub formă nlitică. REZLVARE: Direcţi forţei F este verticlă şi re sensul pozitiv l ei (fig 3.3, ): F = Y = 00 j Y=Y j β α X=X i Fig. 3.. F Y F 30 X 3 X 4 º X Y 30º 60º Y X 5 b c F 3 F 4 d e F 5 30º Y Fig. 3.3.
19 Metod nlitică de compunere forţelor 3 Forţ F formeză un unghi de 30 cu orizontlă (cesul rtă orele două) şi se descompune în două componente (fig. 3.3, b): = + = + = + =. F X Y X i Y j (00cos30 ) i (00sin 30 ) j 86.6i 50 j + Forţ F 3 (cesul rtă orele ptru) se descompune (fig. 3.3, c) : F3 = X3 + Y3 = X3 i + Y3 j = ( 00 cos 30 ) i ( 00sin 30 ) j = 86. 6i 50 j. Componentele forţei F 4 u sensurile opuse sensului pozitiv elor şi respectiv, deci proiecţiile cestei pe e sunt negtive (fig. 3.3, d): F4 = X4 + Y4 = ( 00 cos 60 ) i ( 00sin 60 ) j = 50i j. Forţ F 5 (cesul rtă orele zece) re proiecţi negtivă pe şi pozitivă pe (fig. 3.3, e) : F5 = X5 + Y5 = ( 00 cos 30 ) i + ( 00sin 30 ) j = 86. 6i + 50 j Metod nlitică de compunere forţelor Se consideră un sistem de forţe concurente coplnre F F,,,, F n! cţionând în punctul M şi rezultnt R, stbilită cu relţi (.3). Scriind forţele sub formă nlitică (3.3) şi făcând sum, se obţine: F = X i + Y j F = X i + Y j " " " " F = X i + Y j n n n n R = F = i X + j Y h= n h h h h= i= n (3.7) Deorece epresi nlitică rezultntei este: R = X i + Y j (3.8) tunci, din relţiile (3.7) şi (3.8) se obţin proiecţiile forţei rezultnte: X = n X h h= şi Y = Y h precum mărime şi direcţi ei (cosinusurile directore): n h= R = X + Y ; cos X α ; cos Y β. R R R R (3.9) = = (3.0)
20 4 Complemente de Mecnică Relţiile (3.9) eprimă teorem proiecţiilor: Proiecţi rezultntei unui sistem de forţe concurente pe orice ă este eglă cu sum lgebrică proiecţiilor forţelor ce lcătuiesc sistemul, pe ceişi ă Aplicţii 3.. Să se determine rezultnt sistemului formt din ptru forţe, din figur 3.4. Forţele sunt egle în modul cu F. REZLVARE: Rezultnt sistemului este: 4 R = F = X i + Y j h= h Alegem sistemul de e după direcţiile forţelor F şi F 4 cre sunt ortogonle. Proiectăm forţele pe e (fig. 3.5, ) şi scriem epresiile lor nlitice: F F 3 F = Fi; F = Fcos60 i + Fsin 60 j = i + j, F 3 30º 60º Fig F F F 4 F 3 F F3 = Fcos30 i + Fsin 30 j = i + j ; F 4 = Fj. F 3 X 3 < 0 Y 3 > 0 Y > 0 F X > 0 F R F 4 F F 3 ' F ' 0 0,5 (F) F 4 b Fig.3.5. Folosind teorem proiecţiilor sub form relţiilor (3.9), se clculeză proiecţiile rezultntei: 4 F F 3 F X = X h = F = (3 3) 0, 634F h=
21 Metod nlitică de compunere forţelor 5 4 F 3 F F Y = Yh = F = ( 3 ) 0, 366F. h= Mărime rezultntei şi direcţiile ei se clculeză cu relţi (3.0): R = R = X + Y = F F, cos α R = 0, 866; cos β R = 0, 500 α R = 30 ; β R = 60. Poligonul forţelor din figur 3.5, b conduce l celşi rezultt. 400 N 60º Fig N 30º 3.3. Ţăruşul din figur 3.6 este trs cu două frânghii. Să se determine mărime şi unghiul β pe cre îl formeză rezultnt cu verticlă. Răspuns: R = 500 N, β 650'. 45º 300 N 60º 600 N 3.4. Două cbluri cţioneză supr inelului din figur 3.7 cu forţe cunoscute. Să se determine rezultnt lor. Răspuns: R = 737 N. Fig Să se descompună în componente după direcţiile sistemului de e şi să se scrie epresiile nlitice le forţelor din figur 3.8, ştiind că tote forţele u mărime de 0 N. 60º 60º 30º 30º b c d e f Fig Cinci forţe cu origine în vârful l hegonului A A A 3 A 4 A 5, u etremităţile în celellte cinci vârfuri. Cunoscând mărime forţei F = 0 N, să se clculeze rezultnt sistemului de forţe (fig. 3.9). Răspuns: R = 60 i.
22 6 Complemente de Mecnică F F F 5 A 5 A A F 4 F 3 A 3 A 4 F 60º F 3 F 45º 30º F 4 Fig Fig Forţele din figur 3.0 u următorele mărimi: F = 4,4 N, F =F 4 = = 5 N, F 3 = 8,66 N. Să se clculeze rezultnt sistemului de forţe şi să se verifice rezulttul, utilizând metod grfică. Răspuns: R = 5 i Forţele din figur 3. u mărimile egle cu 5P. Primele două forţe sunt pe direcţi punctelor A şi A, ir ce de- trei este orizontlă. Să se clculeze rezultnt lor ştiind că o diviziune croijului este eglă cu. REZLVARE: Se clculeză mi înţâi proiecţiile forţei F folosindu-se funcţiile trigonometrice din triunghiul A B :cosα = B /A =3/5= 0.60; sinα = A B /A =4/5= 0.80; F = F cosα = 5P 0.60 = 3P; F = F sinα = A Fig P 0.80 = 4P; Din triunghiul A B se stbilesc funcţiile trigonometrice: cosα = =B /A =4/5=0.80; sinα =A B /A =3/5=0.60, poi proiecţiile forţei F :F = F cosα = 5P 0.80 = 4P; F = F sinα = 5P 0.60 = 3P. Forţ F 3 re proiecţi nulă pe, în timp ce proiecţi pe este negtivă: F 3 = F 3 ; F 3 = 0. Rezultnt sistemului re proiecţiile (fig.3.): 3 X = X h = 3P + 4P 5P = P Y = Yh = 4P + 3P + 0 = P. h= 3 h= F 3 α α F F B R Fig. 3.. A B 3.9. Forţele din figur 3.3. sunt reprezentte l scră, vând mărimile proporţionle cu distnţele. Să se fle proiecţiile rezultntei, ştiind că o diviziune croijului este eglă cu, ir F =P. Răspuns: X = 0; Y = 3P. F F Fig
23 4. DESCMPUNEREA UNEI FRŢE Descompunere unei forţe este ce de- dou operţie elementră de echivlenţă, reprezentînd inversul primei operţii elementre de echivlenţă, cre fost compunere forţelor concurente. Adunre numerelor dmite o singură operţie inversă, scădere: = b însemnă să flăm pe dcă ştim că b + =. Vectorii vând mi multe crcteristici, se pot enunţ mi multe probleme pe cre le putem numi inverse în sensul că ni se rezulttul unei sumări vectorile şi trebuie să flăm în numite condiţii termenii. Astfel, prin descompunere unei forţe R în n componente concurente pe suportul său se înţelege înlocuire unei forţe dte R cu forţele stfel încât să eiste următore eglitte vectorilă: n i= F i = R (4.) Aprent relţiile (.3) şi (4.) sunt identice, dr în relţi (.3) R este unic necunoscută, cu forţele inversă, fiind n necunoscute vectorile (forţele F i cunoscute, în timp ce în relţi (4.) problem este F i, i =,,,n) în loc de un. Concluzi este că în generl, soluţionre problemei descompunerii în mod determint nu este posibilă decât dcă se introduc unele restricţii su condiţii suplimentre. În continure se vor studi numi cîtev czuri prticulre de înlocuire forţei R în problem plnă prin două forţe şi în problem tridimensionlă, prin trei forţe după direcţii concurente. Abordre este cu precădere geometrică, dtorită simplităţii şi elegnţei soluţiilor.
24 8 Complemente de Mecnică 4.. Descompunere unei forţe R în două forţe F şi F, după două direcţii dte, concurente pe suportul său Se cunosc direcţiile şi, concurente în punctul, origine forţei cunoscute R. Rezolvre geometrică presupune construire prlelogrmului B F R Fig. 4.. F două lturi (pgin 7,czul A). C A forţelor, ducând drepte prlele prin etremitte forţei R, l direcţiile dte şi (fig. 4.). Acest cz este echivlent cu rezolvre unui triunghi AC în cre se cunoşte o ltură C (mărime forţei R ), şi direcţiile celor 4.. Descompunere unei forţe R în două forţe F şi F, concurente pe suportul său, un din ele fiind dtă în mărime, direcţie şi sens Dcă pe lângă forţ R este dtă şi forţ F în mărime, direcţie şi sens, tunci construcţi din figur 4. rezolvă F R F Fig. 4.. B A problem: se construieşte triunghiul forţelor AB (fig. 4.) tunci când se cunosc două lturi şi unghiul dintre ele (pgin 9, czul C) Descompunere unei forţe R în două forţe F şi F, concurente pe suportul său, cunoscute c mărime Rezolvre problemei se pote fce pelând l czul de construcţie unui triunghi tunci când se cunosc lturile sle (pgin 0, czul D). Problem pote două soluţii (fig. 4.3), un su niciun.
25 Descompunere unei forţe 9 F B F F F ' A A R F ' Fig B A ' F F ' A F A R Fig B 4.4. Descompunere unei forţe R în două forţe F şi F, concurente pe suportul său, cunoscând mărime unei şi direcţi celeillte Problem se pote reduce l construcţi unui triunghi când se cunosc două lturi şi unghiul opus unei dintre ceste lturi. În figur 4.4 se cunoşte unghiul dintre R şi F (se construieşte lini A A ) şi mărime F (se duce rcul de cerc cu centrul în B şi rz F ). Se obţin două puncte de intersecţie (A şi A ) corespunzătore celor două soluţii. Dcă rcul de cerc este tngent dreptei tunci triunghiul forţelor este dreptunghic şi soluţi este unică (cele două soluţii nteriore sunt confundte). Ultim posibilitte este c sum mărimilor celor două forţe F şi F să fie mi mică decât ce forţei R, dică nu este îndeplinită condiţi geometrică c sum două lturi le unui triunghi să fie mi mre decât trei. În cest cz de construcţie, rcul de cerc nu intersecteză drept, deci nu eistă soluţie. Cele ptru czuri prezentte dmit şi soluţii nlitice cre vor fi bordte prlel cu cele geometrice în plicţiile din cest cpitol. Se lsă l preciere cititorului cre din cele două vrinte este mi ccesibilă.
26 30 Complemente de Mecnică 4.5. Descompunere unei forţe R în trei forţe F, F şi F3 după trei direcţii concurente dte, necoplnre F 3 F 3 R F Fig este nedetermintă. Rezolvre geometrică se rezumă l construcţi unui prlelipiped în cre cunoştem direcţiile muchiilor concurente în, şi digonl cestui, eglă cu R. În prticulr, dcă cele trei direcţii sunt reciproc ortogonle (ele unui sistem de referinţă triortogonl), tunci vem un prlelipiped dreptunghic. Dcă cele trei direcţii sunt în celşi pln, problem Rezolvre nlitică re c suport scriere ecuţiei vectorile (4.): F + F + F3 = R (4.) sub form trei ecuţii de proiecţie pe ele sistemului de coordonte: X + X + X 3 = X (4.3.) Y + Y + Y3 = Y (4.3.b) Z + Z + Z 3 = Z (4.3.c) În cest sistem (4.3) sunt trei necunoscute: mărimile forţelor F, F şi F 3. Epresi fiecărei forţe F i se pote scrie în funcţie de versorul direcţiei Δ i pe cre se flă: F = F u = F (cosα i + cos β j + cos k ) (4.4) i i i i i γ i i Deorece forţ R = Xi + Yj + Zk este cunoscută şi nenulă, şi deci termenii liberi i sistemului linir de ecuţii (4.3) nu sunt toţi nuli, soluţi eistă şi este unică (numi în condiţiile c cele trei direcţii să nu fie coplnre).
27 Descompunere unei forţe Aplicţii 4.. Să se descompună o forţă de 3N în două componente ortogonle, concurente pe suportul său, dcă: ) un dintre componente este de N; b) componentele sunt egle; c) un dintre componente este dublul celeillte. [4] REZLVARE: Se plică teorem lui Pitgor într-un triunghi dreptunghic: ) Suntem în czul prezentt l punctul 4.4: R = F + F de unde F = R F = 3 = 5 = 5N; b) În cest cz R = F de unde R / c) Relţi dintre lturile triunghiului dreptunghic este F = R /5 rezultând = 69 /5 = 33.8 = 5, 84 F = şi deci 3 = = 84,5 9, 9 = R F + 4F = 5F F N. F N; =, deci 4.. Ce unghi trebuie să fcă două forţe de 6N şi de 8N stfel încât rezultnt lor să fie de 0N? REZLVARE: Suntem în czul prezentt l punctul 4.3. Se plică teorem cosinusului (,) R F + F + F F cosα = şi se clculeză: R ( F + F ) 0 (6 + 8 ) cosα = = = 0 rezultă α = 90, deci F F 6 8 componentele sunt ortogonle. 90 A C P= 3 α Q= Fig B 4.3. Două forţe concurente P şi Q sunt în rportul 3 l şi u o rezultntă de N. Ce unghi formeză ele? [4] REZLVARE: Cele două forţe împreună cu rezultnt formeză lturile triunghiului ABC. Triunghiul este dreptunghic deorece = +( 3). Se scrie: sin α= BC / AB ; α =60. Unghiul formt de cele două forţe este 90 + α =50 (fig. 4.6).
28 3 Complemente de Mecnică 4.4. Ce relţie trebuie să eiste între două forţe P şi Q cre formeză între ele un unghi de 35, ştiind că rezultnt este eglă cu ce mi mică dintre cele două forţe? [4] REZLVARE: Se presupune că P < Q. Teorem cosinusului se plică în cest cz: P = P + Q PQ /, din cre Q = P. Concluzi este că forţ Q este digonl pătrtului construit pe forţ P, deorece rportul forţelor Q şi P este. Rezolvre grfică este l fel de directă c ce nlitică: fie forţ P ce mi mică dintre forţe şi AB direcţi celei de- dou forţe, cu cre fce unghiul de 35. Se descrie un rc de cerc cu centrul în şi rză A. Se duce B Q R C P A Fig prin punctul A o prlelă l direcţi B cre intersecteză rcul în punctul D. Rezultnt este AD eglă c mărime cu forţ P şi deci e este perpendiculră pe direcţi AC. Prlel DB stbileşte etremitte forţei Q (fig. 4.7) Rezultnt re proiecţiile pe e cunoscute: R = F, R = F, şi R z = F. Se cere să se descompună pe după direcţiile vectorilor v (,,0), v (,,) şi v 3(0,, ). R = F + F + F = λ v + λ v + v REZLVARE: Se consideră rezultnt unde necunoscutele sunt sclrii λ, λ şi λ 3. Aceste se flă din sistemul ecuţiilor de proiecţie (4.3,,b,c): λ λ λ λ 0 + λ Din primele două ecuţii se obine 0 λ + 0 = F + λ3 = F λ3 = F λ 3 =, din ce de- trei λ = F λ = F. Răspunsul este: F = F i + j), F = F( i j + k ), F 0. ( 3 =, ir din prim 4.6. Să se descompună rezultnt R în două componente concurente le căror suporturi fc un unghi de 60. Să se studieze czurile prticulre: ) F =F ; b) F =F ; c) F =R/; d) F =R.

29 Descompunere unei forţe Formă interctivă de studiu individul biectiv: descompunere unei forţe după direcţiile de coordonte pentru diferite vlori le forţei, cu vriţi unghiului pe cre ceste îl fce cu ; verificre clculelor efectute de student cu cele furnizte de progrm. Specific: Mărime forţei pote ve vlori între şi 00, ltfel progrmul nunţă erore. Unghiul α este pozitiv în sens ntiorr. Eerciţiu: L deschidere plicţiei ecrnul se prezintă c în figur 4.8, poi se introduce mărime forţei şi unghiul α formt cu. Reprezentre grfică forţei şi descompunere cestei este reprezenttă stfel încât vlorile clculte de rezolvitor pot fi dej comprte clittiv. După introducere proiecţiilor forţei este fişt un buton Comprţi rezulttele cu cele le clcultorului, ir efecture unui clic cu mouse-ul pe cest buton fce posibilă cestă comprţie (fig. 4.9). Trecere l ltă plicţie se fce ctionând butonul Alt eerciţiu. Se introduc noile dte pentru forţă şi unghiul α. Alt eemplu este prezentt în figuri 4.0. Fig. 4.8.

30 34 Complemente de Mecnică Fig. 4.9 Fig. 4.0.
31 5. MMENTUL UNEI FRŢE ÎN RAPRT CU UN PUNCT 5.. Definiţie, observţii forţă cre cţioneză supr unui corp rigid nu pote fi definită numi prin proiecţiile sle, deorece este un vector lunecător. Astfel, pre c bsolut necesră definire noţiunii de moment l unei forţe în rport cu un punct. Momentul în rport cu punctul l unei forţe F plicte în A, este prin definiţie entitte mecnică vectorilă eprimtă prin produsul vectoril: M A F =. (5.) Vectorul M se crcterizeză prin: - mărime: M = A F sin( A, F) = F d, deorece în triunghiul AB dreptunghic (fig. 5.), s- nott distnţ de l punctul l suportul forţei, B=d (brţul forţei) şi A sin( A, F ) = d ; - direcţi perpendiculră pe plnul determint de forţ F şi punctul ; - sensul stbilit cu regul mâinii drepte (fig. 5..) su şurubului drept; - punctul de plicţie. Mărime momentului se măsoră în unităţi de forţă înmulţite cu unităţi de lungime (N m), ir dimensiune este MLT - L=ML T -. Semnificţi fizică momentului M se pote găsi în tendinţ solidului rigid de se roti în jurul punctului, presupus fi. z M o d z B F A Fig. 5.. Fig. 5..
32 36 Complemente de Mecnică z M o F A A Fig z M M b F A În czul în cre forţ se flă în plnul, vectorul M este prlel cu z şi deci se pote scrie: M M k în cre M z este proiecţi momentului pe Z. = (5.) serie de observţii sunt deosebit de utile clculului prctic: z! Momentul este nul tunci când punctul în rport cu cre se clculeză momentul, se flă pe suportul forţei (brţul forţei este nul).! Momentul M rămâne celşi, oricre r fi punctul A de pe drept suport forţei F. Se consideră forţ F plictă în lt punct A de pe suportul său (fig. 5.3, ) şi se clculeză: A F = ( A + AA ) F = A F + AA F = A F = M (produsul vectoril AA F =0, pentru că AA este colinir cu F ).! Momentul unei forţe în rport cu un punct fiind un vector legt, schimbre polului în cre se clculeză, din în (fig. 5.3, b), conduce l următore relţie: su M = A F = ( + A) F = F + A F M M F = + (5.3) Deci, schimbând polul, se schimbă momentul, dr numi în czul în cre noul punct se flă pe o dreptă cre trece prin şi este prlelă cu forţ F ( F F 0 = ), tunci relţi (5.3) devine M M =.! Epresi nlitică momentului forţei F = Xi + Yj l cărei suport trece prin punctul A de coordonte şi, în rport cu origine sistemului de e,, este : M = M k = ( Y X) k (5.4) z
33 Momentul unei forţe în rport cu un punct 37 Acest se pote stbili descompunând forţ F în componente după e c în figur 5.4 şi clculând momentele cestor, stfel: M Y A(,) X F = brţul componentei Y Fig = brţul componentei X - component Y re brţul, ir semnul pozitiv l momentului cestui este dt de regul burghiului (tendinţ de rotire în rport cu este în sens ntiorr, suprpunând pe drumul cel mi scurt peste ; - component X re brţul, ir semnul negtiv l momentului cestei rezultă din tendinţ de rotire în rport cu, în sens orr. 5.. Aplicţii 5.. Să se clculeze momentul forţei F de 7.5 N în rport cu origine (fig.5.5,), ştiind că suportul ei întâlneşte ele de coordonte în A(-3,0) şi B(0,4). REZLVARE: Se noteză cu P piciorul perpendiculrei din pe suportul forţei, P reprezentând brţul cestei. În triunghiul dreptunghic AB se clculeză înălţime: A B 34 P = = = 4. m. AB 5 Tendinţ de rotire forţei este în sens orr şi deci, semnul momentului este negtiv: M = F P k = 75, 4, k = 8k, M = 8 Nm. P A(-3;0) F B(0;4) Y A Fig F α X 3 Y B b F X 4
34 38 Complemente de Mecnică Altă posibilitte de rezolvre constă în descompune forţ F în componente, într-un punct pe suportul ei flt l intersecţi cu un din ele de coordonte. F = F i + F j = F A AB i + B AB j = i + j cosα sin α 75, 3 4 = 45, i + 6 j. 5 5 Descompunând stfel forţ în punctul A (fig. 5.5, b) component X re direcţi originii şi deci momentul nul în rport cu punctul, pe când component Y re brţul egl cu 3 m şi roteşte orr, deci: M = Y 3= 6 3= 8 Nm. z Forţă F se pote descompune şi în B;component Y trece prin origine şi nu produce moment, pe când celltă componentă X re brţul egl cu 4 m şi roteşte orr, deci: Mz = X 4 = 45, 4 = 8 Nm. Se obţine celşi rezultt folosind direct relţi (5.4). 5.. Să se clculeze momentul forţei F = 5, i + 45, j în rport cu origine, ştiind că suportul ei trece prin punctul A(; 3,6). Dr dcă suportul cestei trece prin punctul B(-; 3,6)? Unităţile de măsură sunt N şi m. Răspuns: M = Y X = 8 Nm; M = Y X = 0 A A B B 5.3. Forţ F este prlelă cu şi re proiecţi pozitivă X = 0 N. ştiind că în rport cu, re un moment M =,5 Nm, să se clculeze brţul forţei şi să se determine ordont punctului A de pe prin cre trece forţ F. Răspuns: d = 0.5 m; A = -0,5 m Să se determine forţ F l cărei moment în rport cu origine este de -30 Nm, drept-suport întâlneşte în punctul A de bscisă A =,5 m şi proiecţi forţei pe este pozitivă, X = 0 N. Cre este ordont punctului B flt pe şi pe drept suport forţei? Răspuns: După ce se descompune F în A, se clculeză Y = M / A F = 0i 0 j; F = 8. 8 N; B =, 5 m Cunoscând F = 5 j şi M F k flt pe pentru cre M F k B Răspuns: Se foloseşte relţi (5.3) şi B = 4 m. ( )= 0, se cere bscis B punctului B ( )= 0. Unităţile de măsură sunt N şi m.
35 6. MMENTUL UNEI FRŢE FAŢĂ DE AXĂ 6.. Definiţie, observţii În fr noţiunii de moment l unei forţe în rport cu un punct, l stbilire sistemelor echivlente de forţe este de semeni necesră definire noţiunii de moment l unei forţe clcult în rport cu o ă. Prin definiţie, Momentul unei forţe în rport cu o ă ( ) de versor u, este mărime mecnică sclră M eprimtă prin proiecţi pe ce ă, momentului forţei clcult în rport cu un punct rbitrr, prţinând celeişi e (fig. 6.): M = ( P F ) u (6.) Principlele observţii referitore l definiţi de mi sus sunt următorele:! Momentul M crcterizeză din punct de vedere mecnic clittiv şi cntittiv, tendinţ pe cre r ve-o solidului rigid presupus fit pe ( ), de se roti în jurul cestei sub cţiune forţei F.! În definiţi momentului unei forţe fţă de o ă ( ), se firmă că legere punctului este rbitrră, fără fi fecttă mărime M. Verificre cestei firmţii se fce clculând momentul forţei F în punctul Q de pe ( ) şi scriind proiecţi cestui M ' (fig. 6.): M ' = ( r' F ) u = ( QP F ) u = [( Q + P) F ] u = = ( Q F ) u + ( P F ) u = ( P F ) u = M (6.) deorece Q u şi deci produsul mit ( Q F ) u este evident, nul.
36 40 Complemente de Mecnică! Momentul unei forţe fţă de o ă este eprimt printr-un produs mit şi cest este nul, dcă cei trei vectori din (6.) sunt coplnri, dică suportul forţei F şi ( ) sunt în celşi pln.! Pentru plicţii, următore observţie devine utilă: momentul unei forţe F fţă de o ă ( ) este egl cu intensitte vectorului moment l componentei forţei F dintr-un pln norml pe ( ), clcult în rport cu punctul în cre înţepă plnul (fig. 6.): M r F =± (6.3) Verificre cestei firmţii se obţine imedit dcă forţ F se descompune în două componente: prim F, prlelă cu ( ), ir dou F, fltă în plnul norml l ă: F = F + F (fig. 6.). Se clculeză: ( ) [ ( )] ( ) ( ), (6.4) M = P F u = P F + F u = P F u = r F u deorece produsul mit ( P F ) u = 0.! Relţi dintre momentul unei forţe clcult în rport cu un punct şi momentele celeişi forţe fţă de trei e reciproc perpendiculre şi concurente în punctul, este : M = r F = Mi + M j+ Mzk (6.5) în cre M, M, Mz sunt proiecţiile pe e le momentului M şi deci, M, M, Mz reprezintă momentele forţei F fţă de ele, şi z. ( ) M = M u M r r Q u F P u r F F P F! Fig. 6.. Fig. 6..
37 Momentul unei forţe fţă de o ă Teorem lui Vrignon. F F Dcă supr unui punct mteril M cţioneză un sistem de forţe,,...,, tunci fiecre forţă re un moment în rport cu punctul : F n M ( F ) M F ; = M ( F ) M F,..., = M( Fn) = M Fn. Adunând ceste eglităţi, se obţine: M ( F ) + M ( F ) M ( F ) = M F + M F M F = n n M ( F + F F ) = M R = M ( R), n unde R este rezultnt sistemului de forţe şi M ( R)= M R este momentul ei în rport cu celşi punct. Relţi obţinută sub form: M ( R) = M ( F ) + M ( F ) M ( F ) n, (6.6) eprimă mtemtic teorem lui Vrignon. Un rţionment identic se pote fce pentru momentul rezultnt l forţelor clcult fţă de o ă ( ) cre trece prin polul. Dr un rezultt direct se obţine înmulţind sclr relţi (6.6) cu versorul ei ( ) şi conform definiţiei (6.), se flă: M n n = M ( Fi ) u = i= i= ( R) u = M M ( F ) (6.7) i Teorem se enunţă: Momentul rezultnt l unui sistem de forţe concurente într-un punct A, clcult în rport cu un pol (su cu o ă ) este egl cu momentul rezultntei celui sistem de forţe concurente, în rport cu polul (respectiv ).
38 4 Complemente de Mecnică Se fc două remrci: teorem lui Vrignon se mi plică şi ltor sisteme de forţe cre se reduc l o rezultntă unică, ş cum se v ilustr şi pentru czul forţelor coplnre şi l forţelor prlele; din punct de vedere prctic, teorem lui Vrignon este un instrument de simplificre clculului momentului rezultnt, prin înlocuire cestui cu momentul rezultntei APLICAŢIE 6.. bră solicittă il de o forţă F, este sudtă prin intermediul două cordone de sudură de o plcă suport. Să se descompună forţ după direcţiile celor două cordone, cunoscând distnţele e şi e (fig. 6.3). REZLVARE: Direcţiile celor două cordone ( ) şi ( ) sunt prlele cu suportul forţei F. Se plică teorem lui Vrignon, scriind momemtele fţă de două puncte A şi B, flte pe ( ) şi respectiv ( ) : F e = F ( e + e ) şi F e = F ( e + e ), unde F şi F sunt mărimile componentelor cerute. Rezultă: F e F e F = şi F = şi se verifică F + F = F. e + e e + e plcă bră cordone de sudură e e F F F ( ) ( ) Fig. 6.3.
39 7.. Definiţie, proprietăţi 7. CUPLURI DE FRŢE Un sistem de două forţe prlele cţionând pe suporturi diferite, egle c intensitte şi de sensuri opuse, formeză un cuplu. Un cuplu plict unui solid rigid tinde să-l rotescă în jurul unei e perpendiculre pe plnul celor două forţe. Fie F şi - F două forţe în plnul (fig. 7.). Momentul cuplului se defineşte c sum momentelor forţelor cre îl lcătuiesc: M = A F + B ( F) = ( A B) F = BA F = d F k. (7.) Se observă că momentul cuplului este independent de punctul cu cre se clculeză, mărime lui fiind eglă cu produsul dintre intensitte unei forţe şi distnţ dintre dreptele suport le celor două forţe, ir sensul stbilit cu regul burghiului (şurubului drept). Crcteristic cuplului de forţe este rezultnt nulă sistemului de forţe, în timp ce momentul este un vector liber, diferit de zero. Astfel, condiţi c două cupluri să fie echivlente este c ele să ibă celşi moment. Fiind dt un sistem de mi multe cupluri cre se găsesc în celşi pln, prin sumre momentelor lor se obţine un moment rezultnt l unui cuplu echivlent. 7.. Aplicţii 7.. Să se rte că sistemul de forţe cre cţioneză plc dreptunghiulră ABCD din figur 7., : ) se reduce l un cuplu şi să se fle momentul cestui cuplu; b) se reduce l câte o pereche de forţe cţionând pe lturile prlele le dreptunghiului. REZLVARE: ) Se clculeză rezultnt sistemului de forţe R = X i + Y j = 0 şi momentul rezultnt M A : X = X h = = 0, Y = Yh = 0, M A = 0, 0 0,3 0 = 6 Nm. z M o F B -F Fig. 7.. A d
40 44 Complemente de Mecnică Deorece R = 0 şi M A 0, sistemul de forţe se reduce l un cuplu l cărui moment este de +6 Nm. BSERVAŢIE: descompunând forţ de 0 N în două componente colinire, de 0 N şi 00 N (fig. 7., b), sistemul este lcătuit din două perechi de forţe prlele, egle c intensitte, cu sensurile opuse, formând două cupluri cu momentele de -4 Nm şi 0 Nm. Cuplul echivlent re momentul egl cu 0-4=6 Nm. b) Cunoscând momentul cuplului şi direcţiile perechii de forţe (deci distnţ d dintre forţe), se clculeză mărimile forţelor dcă ceste sunt pe direcţi lturilor AB şi CD (fig. 7., c), respectiv BC şi DA (fig. 7., d): M 6 = A M = = A 6 F 0 N, F = = = 40N BC 0,3 AB 0,5 Sensurile forţelor se consideră stfel încât cuplul formt să rotescă în sens ntiorr. 0N A D 0,5 C 0N 00N B 0, 0, 7.. Plăcile din figur 7.3, şi b sunt cţionte în lungul lturilor l de forţe F egle în modul. Să se rte că sistemele de forţe se reduc l câte un cuplu şi să se clculeze momentele cestor. 3 Răspuns: M = Fl ; M = Fl Sistemul de forţe din figur 7.4 se reduce l un cuplu cre re momentul 7,65 Nm. Să se fle mărime forţei F, unghiul α formt cu şi distnţ BC. Răspuns: F= 30 N, α = 30, BC = 0,6 m. F 3 C F 4 l l l F B A l F Fig N 4Nm 0N D A l F l b 00N 0Nm 00N b Fig. 7.. F 3 C B l F 0N 6Nm 7,3N c A B 0,3 0N 0,5 Fig C 6Nm 40N F α 60 7,3N 40N 0,5 d
41 8. STUDIUL SISTEMELR DE FRŢE CPLANARE 8.. Reducere sistemelor de forţe coplnre Fie un sistem de n forţe coplnre plicte unui corp rigid şi un punct în plnul forţelor (fig. 8.,). Fiecre din forţe pote fi redusă în, obţinându se în cest punct: - n forţe concurente, echipolente cu forţele dte; ceste forţe se reduc l o rezultntă unică: R = n h= F h ; (8.) - n cupluri de forţe, reprezentte prin cele n momente M h, colinire cu z (perpendiculră pe plnul forţelor); însumându-le se obţine un moment rezultnt: M = M = k M n h h= h= n h (8.) Rezultnt R şi momentul rezultnt M formeză un sistem echivlent cu sistemul celor n forţe dte (fig. 8.,b). Pereche de vectori R şi M se numeşte torsorul sistemului de forţe în rport cu punctul. Epresiile nlitice le celor doi vectori sunt: R X i Y j = + (8.3) = (8.4) M M k F F n F i R A R n A i M o A d A F A(,0) A B(0, B ) b c Fig. 8..
42 46 Complemente de Mecnică Deorece M re direcţi normlă plnului forţelor în cre se găseşte rezultnt R, se pote scrie epresi nlitică momentului M sub form relţiei (5.4), funcţie de proiecţiile rezultntei: M k = ( Y X ) k. (8.5) În bz cestei relţii, sistemul de n forţe pote fi înlocuit numi cu o rezultntă vând suportul pe drept de ecuţie: Y X = M. (8.6) Acestă dreptă, întâlneşte în punctul A; înlocuind în (8.6) A = 0, se obţine coordont = M / Y. Notând cu B punctul de intersecţie cu, B = 0 şi M X B A = / (fig. 8., c). Sistemul echivlent cel mi simplu obţinut în cest cz de reducere este o forţă unică (rezultnt). C urmre, se pote plic teorem lui Vrignon, scriind că momentul rezultnt M este egl cu momentul rezultntei R : unde d este brţul rezultntei (fig. 8., c). M d R = (8.7) 8.. Czurile de reducere l sistemele de forţe coplnre Sistemele de forţe coplnre reprezintă unul din czurile de forţe des întâlnite în prctic inginerescă. Clsificre czurilor este prezenttă în continure: ) R = 0 şi M = 0, sistemul de forţe este echivlent cu zero su sistemul de forţe este în echilibru. Cele două relţii vectorile furnizeză trei ecuţii de proiecţie, respectiv rezultnt două ecuţii de proiecţie forţelor pe ele şi, ir momentul o ecuţie de proiecţie corspunzătore ei z: X = Xh = 0; Y = Yh = 0; M = Y X z ( h h h h) = 0. (8.7) ) R = 0 şi M 0, sistemul de forţe dt este echivlent cu un cuplu, momentul cestui vând direcţi perpendiculră pe plnul forţelor (fig. 8.);
43 Studiul sistemelor de forţe coplnre 47 3) R 0 şi M = 0, sistemul de forţe este echivlent în cest cz cu o singură forţă (rezultnt), l cărei suport trece prin punctul de reducere (fig. 8.3). 4) R 0, M 0 şi R M = 0, deorece R M. Sistemul echivlent cel mi simplu este reprezentt de o forţă unică (rezultnt) cre nu trece prin punctul de reducere (fig. 8.4). A centrlă este chir suportul rezultntei şi ş cum s- rătt, se plică în cest cz teorem lui Vrignon. z z z F d -F R (A.C.) d R (A.C.) Fig. 8.. Fig Fig Aplicţii 8.. Să se reducă în punctul sistemul de forţe cre cţioneză pe stâlpul din figur 8.5 şi să se stbilescă sistemul echivlent cel mi simplu. 5 kn 3,00 5 kn 0,80 0 kn 30 REZLVARE: Utilizând sistemul de referinţă din figur 8.5, proiecţiile rezultntei sunt: X X h = = cos =, =, kn, Y = Y h = 5 0sin 30 = 5 0 = 35 kn. 4,00 Rezultnt re mărime: Fig R = X + Y = 36, 785 kn. Momentul forţelor clcult în rport cu punctul : M = 6 7 ( 0sin 30 ) 0, 8 + ( 0 cos 30 ) 4 = , 8 = 9, 8kNm
44 48 Complemente de Mecnică În figur 8.6, este reprezentt sistemul echivlent în punctul, lcătuit din rezultnt R şi momentul rezultnt M. Sistemul echivlent cel mi simplu este dt numi de rezultnt R (fig. 8.6,b) fltă pe drept suport cre întâlneşte ele de coordonte în punctele A( A,0) şi B(0, B ): A = M / Y = 98, /( 35) = 055, m = M / X = 98, /(, 3) =, 70 m B Brţul rezultntei este: d = 9,8/36,785 = 0,54 m. X R M Y B(0;,70) R d A(-0,55; 0) b Fig Să se determine momentul cuplului M, mărime şi direcţi forţei F, stfel încât br din figur 8.7 să fie în echilibru. REZLVARE: Se lege, brei, ir origine în cpătul stâng l brei (fig. 8.7). Pentru flre celor trei necunoscute F, α şi M se scriu ecuţiile de echilibru : X = Fcosα 0 cos30 = 0 Y = Fsin α 0 + 0sin 30 = 0 M = 0 + ( 0 sin 30 ) 5 M = 0 F cosα = 0 3 F sin α = 0 M = 0 Nm Se ridică l pătrt şi se dună primele două eglităţi şi rezultă F = 0 N, poi α = 30. Verificre rezulttului se fce procedând l scriere condiţiei c momentul clcult în rport cu un lt punct din pln, de eemplu în rport cu B, să fie nul: MB = ( Fsin α ) M = 0 ( / ) = = 0 α,0 F A 0kN 3,0 0kN 30 Fig B,5 C M
45 9. STUDIUL SISTEMELR DE FRŢE PARALELE 9.. Reducere sistemelor de forţe prlele Considerăm un sistem de n forţe prlele cu z (fig. 9., ). În urm operţiei de reducere fţă de punctul, se obţin componentele torsorului: R M = Fh = ( Fh ) k = Z k ; = ( rh Fh ) = ( M h ) i + ( M h ) j = M i + M j. (9.) F z F F h F n Fig. 9.. z R b 90 M R (A.C.) Cei doi vectori sunt ortogonli ( R M (numit invrintul sclr) este nul, R M ) şi prin urmre, produsul lor sclr = 0. Astfel se deduce că proiecţi momentului rezultnt pe direcţi rezultntei (momentul minim) este nul M min = 0 (fig. 9., b). Bineînţeles, teorem lui Vrignon pote fi plictă şi pentru ceste sisteme de forţe prlele, dcă rezultnt este nenulă. 9.. Czuri de reducere Czurile de reducere posibile pentru sistemele de forţe prlele sunt: ) R = 0 şi M = 0, sistemul de forţe este în echilibru. Cele două relţii vectorile furnizeză şi în cest cz trei ecuţii de proiecţie, respectiv rezultnt o ecuţie de proiecţie corspunzătore ei z, ir momentul două ecuţii de proiecţie pe ele şi :
46 50 Complemente de Mecnică Z = Fh = 0; M = F ( h h) = 0; M = F ( h h) = 0. ) R = 0 şi M 0, sistemul de forţe echivlent cu un cuplu; (9.) 3) R 0 şi M = 0, sistemul de forţe este echivlent cu o forţă unică R, l cărei suport trece prin punctul de reducere ; 4) R 0, M 0, R M = 0, sistem echivlent cu o forţă unică R, cre nu trece prin punctul de reducere. A centrlă (fig. 9.,b) se găseşte sub form dreptei de intersecţie două plne, le căror ecuţii se stbilesc plicând teorem lui Vrignon în rport cu ele şi respectiv : Z = Z = F h h F h h = = F h h Z F h h Z 9.3. Centrul forţelor prlele (9.3) propriette deosebit de importntă, când se consideră că forţele cre lcătuiesc sistemul îşi menţin punctele de plicţie şi intensităţile, dr îşi modifică direcţi continuând să rămână prlele între ele, este cee că drept suport rezultntei trece mereu printr-un punct fi C, numit centrul forţelor prlele. Acest punct re coordontele: c F h h = c = Z F h Z h ; (9.4) Coordontele centrului C verifică ecuţi ei centrle (9.3) şi deorece centrul C este un punct invribil l solidului, l o permutre elor de coordonte se stbileşte şi coordont z = z F. Vectorul de poziţie l centrului C se scrie: c h h rc = ci + c j + zck (9.5) Se subliniză condiţiile pe cre trebuie să le îndeplinescă sistemul de forţe prlele pentru c să eiste un stfel de centru: rezultnt este diferită de zero ( R 0) şi forţele sunt vectori legţi.
47 Studiul sistemelor de forţe prlele 5 Proprietăţile pe cre le re centrul forţelor prlele sunt: poziţi cestui nu se modifică dcă tote forţele sunt multiplicte cu o mărime sclră; poziţi centrului forţelor prlele este invribilă în rport cu forţele, deci nu depinde de sistemul de e les. Un cz frecvent întâlnit în plicţii este cel l forţelor prlele uniform distribuite (fig. 9., ) su linir distribuite (fig. 9., b). Pentru forţele distribuite, sumele finite din relţiile stbilite (9.), (9.) şi (9.3) devin integrle, ir forţele F h de sub opertorul SIGMA devin forţe elementre df. Cunoscând vlore p(n/m) forţei distribuite şi lungime l(m) pe cre este plictă cest se clculeză rezultnt R (fig. 9.,) considerând că pe un element de lungime d cţioneză o forţă elementră df = p d: l l l R = df = p d = p d = pl (9.6) Coordont c punctului de plicţie pentru rezultnt R se sbileşte folosind relţi (9.4) în mod decvt: lo df = R lo p d l l = = l 0 0 C = pl. (9.7) Acest rezultt este uşor de intuit dcă se re în vedere simetri încărcării uniform distribuite. l d p l d p z df=pd z p df=p d Fig. 9.. b
48 5 Complemente de Mecnică R =pl p R =pl/ p Clculul rezultntei forţei distribuite linir din figur 9.,b se conduce în mod semănător, ţinând cont că de cestă dtă, pe elementul infinit mic de lungime d, se eercită o forţă elementră df = pd unde ordont corespunzătore foţei distribuite este p p l = / : l l l l p R df p d l d p pl = = = = d = l (9.8) Rezultnt R se plică l distnţ c de origine elor: C l/ lo l l/ lo Fig p df p d d l = = = R pl pl lo l = l/3 l b l/3 3. (9.9) În concluzie, rezultnt este eglă cu ri forţei distribuite: pentru primul cz R =pl (ri distribuţiei dreptunghiulre), ir pentru cel de-l doile cz R =pl/ (ri distribuţiei triunghiulre). Rezultnt cţioneză l jumătte lungimii l (fig. 9.3, ) şi respectiv, l două treimi din lungime l fţă de vârful triunghiului (fig. 9.3, b) APLICAŢII 9.. Să se determine rezultnt forţelor F = 530 kn şi G = 450 kn, cre cţioneză supr zidului de sprijin din figur 9.4, precum şi coordont punctului în cre cest intersecteză bz zidului. Răspuns: R = 35i 5j; M = 440k; = m.
49 Studiul sistemelor de forţe prlele 53 F 4 3 B G 3 F =0 N F 3 = N,5,0,5,0 A F =8 N F 4 =4 N Fig Fig Să se reducă sistemul de forţe prlele din figur 9.5 în punctul, poi în A şi să se stbilescă czul de reducere, specificând cre este sistemul echivlent cel mi simplu. Răspuns: Y = Yh = 0N; M = Nm; MA = -48Nm; czul d de reducere, R = 0 k pe drept suport de ecuţie = M /Y = 0,m Considerând forţele prlele din figur 9.5 cu origine în puncte fie pe, să se clculeze poziţi centrului lor, utilizând relţiile (9.4). Răspuns: C = 0, m, C = Formă interctivă de studiu individul biectiv: utilizre relţiei (9.4) pentru vlori diferite le intensităţilor forţelor verticle şi pentru distnţe diferite le originilor lor, situte pe. Specific: vlorile forţelor (în număr mim de 0) pot fi între 00N şi +00N. rigine fiecărei forţe trebuie să se fle fţă de între 0m şi +0m, ltfel progrmul nunţă erore. Eemplu de utilizre: se introduce numărul de forţe (3). După introducere cifrei 3, se deschid două ferestre pentru introducere distnţei fţă de primei forţe şi respectiv pentru vlore priecţiei primei forţe (vezi figur 9.6). Se repetă introducere dtelor pentru celellte forţe. L finl pre rezolvre problemei, dică vlore rezultntei şi bscis punctului de plicţie cestei, precum şi relţi utiliztă (fig. 9.7). Dtele introduse se pot vede în ferestr de sub schem de forţe. Aceste sunt reprezentte proporţionl cu vlorile lor. Trecere l ltă plicţie se fce ctionând butonul Alt eerciţiu.
50 54 Complemente de Mecnică Fig. 9.6 Fig. 9.7.
51 0.. Definiţie 0. CENTRE DE MASĂ Se defineşte c centru de msă l unui sistem de puncte mterile M i de mse m i, le căror poziţii sunt determinte fţă de un punct de vectorii de poziţie r i, un punct, l cărui vector de poziţie ρ = G este dt de relţi: n mi ri i= ρ = (0.) n m i= Coordontele sle fţă de un reper sunt: n m i= i i n i i i= i= G = G = n n m mi i ; (0.) m Se observă că numitorul din relţiile (0.) şi (0.) reprezintă ms întregului i= i sistem: stfel: M = n m i i=. Mărimile de l numărător se numesc momente sttice, definite = n S miri i= moment sttic clcult fţă de punctul ; = n S mi i= i şi fţă de. S = n i= m i i moment sttic clcult fţă de, şi respectiv 0.. Proprietăţi le centrului de msă A) Poziţi centrului de msă nu depinde de sistemul de coordonte les, deorece depinde numi de poziţi reciprocă punctelor mterile M i.
52 56 Complemente de Mecnică B) Dcă sistemul de puncte este rigid, tunci şi centrul de msă l cestor puncte se găseşte l distnţe fie de ele. Prin urmre, centrul de msă l unui sistem rigid orecre rămâne fiă în rport cu un reper solidr cu sistemul rigid. C) Dcă vlorile mselor sistemului mteril sunt multiplicte cu o constntă sclră nenulă, poziţi centrului de msă l sistemului nu se modifică, deorece relţi (0.) este omogenă, de grd zero în rport cu mărimile m i. Propriette cest permite reprezentre mselor m i prin lungimi, rii su volume, constnt fiind densitte sistemului considert omogen. D) Centrul de msă l unui sistem mteril constituit dintr-o linie dreptă se flă pe ce dreptă, ir centrul mselor unui sistem mteril pln se flă în cel pln. E) Dcă sistemul mteril dmite un centru, un pln su o ă de simetrie, tunci centrul de msă se găseşte respectiv în centrul, în plnul su pe de simetrie. F) Dcă domeniul ocupt de sistemul mteril pote fi descompus în subdomenii le căror mse şi centre de msă pot fi stbilite direct, tunci centrul de msă l nsmblului se stbileşte cu relţi (0.), în cre m i este ms, ir r i este vectorul de poziţie corespunzător centrului de msă l subdomeniului i. Sistemul iniţil pote fi formt prin dunre su scădere două su mi multe subdomenii Metode geometrice pentru determinre centrului de msă Simetri Din proprietăţile centrului de msă (propriette E) rezultă că se pote determin fără nici un clcul poziţi cestui pentru unele figuri regulte (cre prezintă simetrie). Astfel, următorele plăci regulte vând formă de dreptunghi, romb, pătrt, cerc, triunghi echilterl prezintă cel puţin două e de simetrie (de reflectre su oglindire) conţinute în plnul figurii. Alte figuri pot ve simetrie de rotţie. Astfel, prlelogrmul re o ă de simetrie de rotţie, perpendiculră pe
53 Centre de msă 57 plnul figurii şi cre trece prin punctul de intersecţie l digonlelor. În cest punct se flă centrul său de msă Centrul de msă l unei plăci omogene de formă triunghiulră Suprfţ triunghiulră din figur 0. se împrte în fâşii subţiri prlele cu ltur BC le căror centre de msă se flă pe medin AD. Rezultă că centrul de msă se v găsi undev pe cestă medină. Repetând de cestă dtă operţi de împărţire triunghiului în fâşii prlele cu ltur AB, se stbileşte că centrul de msă se flă pe medin AF. Prin urmre, centrul de msă l plăcii triunghiulre omogene se flă l intersecţi medinelor, în punctul G numit şi bricentru. Acest punct se găseşte întotdeun l o treime din înălţime, măsurtă fţă de bză, su de două treimi măsurte fţă de vârf. De ltfel este cunoscut din geometri nlitică, pentru un triunghi ABC, l cre vârfurile u coordontele A( A, A ), B( B, B ), C( C, C ), punctul G de intersecţie l medinelor v ve coordontele: G =( A + B + C )/3, G =( A + B + C )/3. (0.3) Centrele de msă pentru unele corpuri omogene uzule întâlnite în probleme plne sunt prezentte în Ane C. C h E G D h/3 h/3 A F Fig. 0.. B
54 58 Complemente de Mecnică 0.4. Centre de msă pentru corpuri omogene Rezolvre problemelor de stbilire poziţiei centrelor de msă pentru corpuri omogene se bzeză pe plicre proprietăţii C de l prgrful 0.. Astfel, pentru o bră omogenă vând ms M uniform distribuită pe lungime ei (nottă L), se defineşte densitte unităţii de lungime µ=m/l. Relţi (0.) se scrie după simplificre cu µ: n l i i= n l i ; (0.4) l i i i i= i= G = G = n n l i i= Pentru o plcă omogenă cu ri A şi msă M cunoscute, se scrie densitte unităţii de suprfţă µ=m/a. Relţi (0.) devine în cest cz: n A i= i n Ai i ; (0.5) A i i i= i= G = G = n n A În epresiile (0.4) şi respectiv (0.5), corpul omogen fost descompus in subdomenii simple c formă, ceste vând poziţi fiecărui cemtru de msă cunoscută Aplicţii i= i 0... Să se determine poziţi centrului de msă pentru br omogenă din figur 0.. REZLVARE:. Se lege c sistem de referinţă, sistemul cre încdreză br, cest fiind plstă în primul cdrn (fig. 0.). Br se consideră c o sumă de trei bre A, A şi A A 3. pentru ceste vom scrie următorele lungimi şi coordonte le centrelor de msă: A A 3 C C 3 R C A 4R Fig. 0. R
55 Centre de msă 59 l = πr / = πr sin( π / ) R A = R = ; π / π = R l = 4R A = R; = 0 l3 = πr / 4 = πr A A3 3 = R + CC3 cosπ / 3 = R 4 unde distnţ C C 3 se determină pentru unghiul α=π/4 cu relţi: sin( π / 4) 4R C C3 = R = π / 4 π Clculele se efectueză folosind tbelul 0.: TABELUL 0.. Corpul (i) l i i i l i i l i i () () (3) (4) (5) (6) A () πr R/π R R πr A () 4R R 0 8R 0 A A 3 (3) πr R+4R/π 4R/π πr +4R 4R Sumând vlorile din colon dou, se stbileşte lungime totlă brei cre este 3 L = l i i= = R( + π ). Totlizând vlorile din colon cince şi respectiv şse, se flă momentele sttice cre sunt: S = Ai i = R (7 + π ) şi S 3 = Ai i= i = R (4 + π ).Utilizând relţiile (0.4) obţinem coordontele: S 7 + π S 4 + π C = = R,97R; C = = R 0, 69R L + π L ( + π ) 0.. Plc omogenă trpezoidlă re dimensiunile cunoscute: B, b şi h (fig. 0.3,). Să se clculeze cot C centrului de msă. REZLVARE: Plc trpezoidlă se descompune într-o plcă dreptunghiulră cu ri A = bb şi coordont centrului de msă =h/ (fig.0.3, b), precum şi într-un triunghiulră cu ri A =(B-b)h/ şi coordont centrului de msă =h/3 (fig.0.3, c). 3 i= b h B h/ h/3 b/ b+(b-b)/3 b c Fig. 0.3.
56 60 Complemente de Mecnică Se clculeză: bh ( B b) h + A + A 6 h( B + b) C = = = A ( B b) h + A bh + 3( B + b) Descompunere plăcii se pote fce considerând mi întâi o plcă dreptunghiulră cu ri A =Bh (fig 0.4, B), din cre se scde o plcă triunghiulră cu ri A =(B-b)h/ (fig. 0.4, c). Evident se obţine celşi rezultt: Bh ( B b) h A A 3 h( B + b) C = = = A ( B b) h A Bh 3( B + b) b h B h/ h/3 B/ b+(b-b)/3 b c Fig Să se clculeze bscis centrului de msă pentru plc trpezoidlă din figur 0.3, poi să se verifice rezulttul obţinut folosind descompunere din figur Corpul din figur 0.5 este lcătuit dintr-o bră circulră omogenă vând ms m şi o plcă semieliptică omogenă cu ms cunoscută m. Ce relţie eistă între cele două mse, stfel încât poziţi centrului de msă l corpului să coincidă cu centrul cercului,? Se cunoşte rz R. REZLVARE: Problem implică utilizre relţiilor de form (0.), vând corpuri simple omogene, dr de ntură diferită: o bră şi o plcă. Deorece este ă de simetrie, rezultă imedit că C =0, ir conform legerii sistemului de referinţă (fig. 0.5) se impune condiţi C =0, dică momentul sttic S =0. Elementele geometrice necesre rezolvării sunt pentru primul corp: = R/π, respectiv pentru cel de-l doile = - R/(3π) vezi ne C. Se scrie: S = m = m şi deci m =3m. R + m π + m = 4( R / ) = 0 3π C Fig. 0.5 R C R/
57 Centre de msă Să se determine poziţi centrului de msă pentru plc omogenă din figur 0.6, printro descompunere într-un număr minim de elemente. Cotele din figură sunt dte în dm. REZLVARE: Plc se descompune în două elemente componente (un prlelogrm şi un triunghi dreptunghic), cest fiind numărul minim de elemente cerut. După reprezentre poziţiilor centrelor de msă C i le elementelor, se lege un sistem de e fţă de cre se scriu coordontele i şi i. Criteriul de legere sistemului de e pote fi determint de simplitte cotării centrelor de msă (de eemplu, tote centrele să se găsescă în primul Fig cdrn, coordontele lor fiind tote pozitive). Un lt criteriu s-r întemei pe observţi că tunci când se flă pe ele de coordonte cât mi multe centre de msă, în epresiile momentelor sttice intervin zerourile coordontelor cestor centre şi c urmre, clculele numerice u un volum mi redus. Prlelogrmul re ri A = 4,4 =9,6 dm, şi re centrul de msă l = dm, respectiv =, dm (fig. 0.7,). Triunghiul dreptunghic re ri A = 3,4/ = 3,6 dm, şi re centrul de msă l = +3,0/3 = dm, respectiv =,4+,4/3 = 3, dm (fig. 0.7,b). C C b Fig Se clculeză: ri totlă suprfeţei: A=A +A =3,dm, momentul sttic S =A +A =9,6 +3,6 =6,4 dm 3, momentul sttic S =A +A =9,6,+3,6 3,= 3,04 dm 3. Rezultă l finl coordontele G =S /A=dm şi respectiv, G =S /A=,745 dm..0 C C G Fig BSERVAŢIE: Deorece mbele elemente u centrele de msă cu ceeşi bscisă ( = = dm), l legere sistemului de coordonte se pute ţine cont de cest mănunt considerând trecând prin cele două puncte C şi C (fig. 0.8). În consecinţă se obţine fără clcule G =0. Dcă origine sistemului de coordonte se lege în punctul C, tunci epresi pentru clculul numeric l coordontei G se simplific în continure: G = (A )/A = 3,6,0/3,=0,545 dm. Diferenţ dintre cele două vlori obţinute pentru G reprezintă tocmi distnţ reltivă dintre cele două e.
58 6 Complemente de Mecnică R R = R R Fig R b R R R 0.6. Să se determine poziţi centrului de msă pentru plc omogenă din figur 0.9,. Rz cercului R este cunoscută. REZLVARE: Plc se descompune în următorele ptru plăci simple (fig 0.9,b) vând următrele forme: ) pătrt cu ltur R; ) semicerc cu rz R; 3) triunghi dreptunghic isoscel vând ctetele egle tot cur; 4) sfert de cerc cu rz R (deorece cest se scde, ri s se consideră negtivă). Clculele pot fi orgnizte în tbelul 0., în mod semănător cu cel de l problem 0.. În figur 0.0 s-u reprezentt centrele de msă pentru fiecre plcă simplă componentă, poi s- les un sistem de e după ctetele triunghiului dreptunghic. C 4 C C 3 C Fig TABELUL 0.. Corpul (i) A i i i A i i A i i () () (3) (4) (5) (6) R -R/ R R 3 / R 3 / πr / 0 4R/3π 0 R 3 /3 R / R/3 R/3 R 3 /6 R 3 /6 πr /4 R+4R/3π R 4R/3π πr 3 /4 R 3 /3 -πr 3 /4+R 3 /3 Se efectueză sumele pe colonele, 5 şi 6, după cre se clculeză coordontele centrului de msă cu relţiile (0.5): 3 R (3π 8)/ R(3π 8) G = = = 0, 05R R (6 + π )/ 4 3(6 + π ) 3 R (4 3π ) / R(4 3π ) G = = = 0, 98R R (6 + π )/ 4 3(6 + π )
59 . ECHILIBRUL PUNCTULUI MATERIAL.. Teorem de echilibru sttic l punctului mteril Studiul czului prticulr l compunerii unui sistem de forţe concurente cre re rezultnt nulă (spunem că sistemul de forţe este echivlent cu zero), conduce l noţiune de echilibru l sistemului de forţe cţionând supr unui punct mteril flt în repus. În problemele concrete se plică vrint sttică principiului inerţiei (denumită teorem de echilibru sttic l punctului mteril ) cre se formuleză []: (i) Dcă în momentul iniţil, t=t 0, un punct mteril se flă în repus fţă de un reper inerţil, şi dcă în intervlul de timp [t 0,t ], sistemul forţelor dte şi de legătură ce-i revin este echivlent cu zero (în echilibru), tunci punctul mteril respectiv îşi păstreză stre iniţilă de repus în cel intervl de timp. Reciproc cestei teoreme se enunţă: (ii) Dcă în intervlul de timp [t 0,t ], un punct mteril se flă în repus fţă de un reper inerţil (cee ce se relizeză de regulă prin legături cu mediul), tunci sistemul forţelor dte şi de legătură ce-i revin este echivlent cu zero în cel intervl de timp. În mbele vrinte enunţte, noţiune de echilibru sttic defineşte czul prticulr l stării sistemului de forţe cărui îi corespunde stre de repus punctului mteril supus cţiunii celui sistem de forţe. Prctic, mbele vrinte le teoremei de echilibru sttic se eprimă mtemtic prin relţi: în cre R R = 0 (.) d + l R d este rezultnt forţelor dte, ir R l este rezultnt forţelor de legătură. Forţele de legătură numite şi recţiuni reprezintă echivlentul mecnic l eistenţei unor legături l cre este constrâns punctul mteril. perţi de înlocuire legăturilor cu forţele de legătură este ccepttă în temeiul iomei

60 64 Complemente de Mecnică legăturilor su iomei eliberării (vlbilă în czul tuturor fenomenelor mecnice): Stre mecnică unui sistem de corpuri se păstreză intctă dcă se consideră legăturile suprimte şi se înlocuiesc cu sisteme de forţe psive corespunzătore. Aspectul prctic l plicării cestei iome în czul punctului mteril este cel că orice legătură geometrică pote fi înlocuită cu o forţă de legătură, punctul fiind considert liber şi trtt c tre... Forme interctive de studiu individul biectiv: plicre teoremei de echilibru sttic l punctului mteril Specific: mărimile forţelor pot ve vlori între şi 00, ltfel progrmul nunţă erore. Enunţul fiecărei probleme devine vizibil tunci când mouse-ul se plseză pe prim linie ecrnului evident, unde este fişt tetul Enunţul problemei (fig..). Eerciţii: ) Echilibrul punctului mteril liber (fig..). ) Echilibrul punctului mteril cu legături (fig..,.3). 3) Echilibrul punctului mteril supus l legături cu frecre (fig..4,.5). bservţie: schem forţelor este reprezenttă mereu l scră. Fig..


61 Echilbrul punctului mteril 65 Fig... Fig

62 66 Complemente de Mecnică Fig..4. Fig..5.
BARAJ DE JUNIORI,,Euclid Cipru, 28 mai 2012 (barajul 3)
") BARAJ DE JUNIORI,,Euclid Cipru, 8 mi 0 (brjul ) Problem Arătţi că dcă, b, c sunt numere rele cre verifică + b + c =, tunci re loc ineglitte xy + yz + zx Problem Fie şi b numere nturle nenule Dcă numărul
BARAJ DE JUNIORI,,Euclid Cipru, 8 mi 0 (brjul ) Problem Arătţi că dcă, b, c sunt numere rele cre verifică + b + c =, tunci re loc ineglitte xy + yz + zx Problem Fie şi b numere nturle nenule Dcă numărul
METODE ŞI ETAPE NECESARE PENTRU DETERMINAREA
 ETOE ŞI ETAPE ECESARE PETRU ETERIAREA UGHIULUI A OUĂ PLAE PROF. IACU ARIA, ŞCOALA ROUL LAEA, ORAVIłA, CARAŞ- SEVERI (). Unghi diedru. Fie α şi β două semiplne vând ceeşi frontieră (muchie)d. Se numeşte
ETOE ŞI ETAPE ECESARE PETRU ETERIAREA UGHIULUI A OUĂ PLAE PROF. IACU ARIA, ŞCOALA ROUL LAEA, ORAVIłA, CARAŞ- SEVERI (). Unghi diedru. Fie α şi β două semiplne vând ceeşi frontieră (muchie)d. Se numeşte
Seminariile 1 2 Capitolul I. Integrale improprii
 Cpitolul I: Integrle improprii Lect. dr. Lucin Mticiuc Fcultte de Mtemtică Clcul integrl şi Aplicţii, Semestrul I Lector dr. Lucin MATICIUC Seminriile Cpitolul I. Integrle improprii. Să se studieze ntur
Cpitolul I: Integrle improprii Lect. dr. Lucin Mticiuc Fcultte de Mtemtică Clcul integrl şi Aplicţii, Semestrul I Lector dr. Lucin MATICIUC Seminriile Cpitolul I. Integrle improprii. Să se studieze ntur
Analiza matematică, clasa a XI-a probleme rezolvate Rolul derivatei întâi
 Anliz mtemtică, cls XI- proleme rezolvte Rolul derivtei întâi Virgil-Mihil Zhri DefiniŃie: Punctele critice le unei funcńii derivile sunt rădăcinile (zerourile) derivtei întâi DefiniŃie: Fie f:i R, cu
Anliz mtemtică, cls XI- proleme rezolvte Rolul derivtei întâi Virgil-Mihil Zhri DefiniŃie: Punctele critice le unei funcńii derivile sunt rădăcinile (zerourile) derivtei întâi DefiniŃie: Fie f:i R, cu
MULTIMEA NUMERELOR REALE
 www.webmteinfo.com cu noi totul pre mi usor MULTIMEA NUMERELOR REALE office@ webmteinfo.com 1.1 Rdcin ptrt unui numr nturl ptrt perfect Ptrtul unui numr rtionl este totdeun pozitiv su zero (dic nenegtiv).
www.webmteinfo.com cu noi totul pre mi usor MULTIMEA NUMERELOR REALE office@ webmteinfo.com 1.1 Rdcin ptrt unui numr nturl ptrt perfect Ptrtul unui numr rtionl este totdeun pozitiv su zero (dic nenegtiv).
Cursul 4. Matrice. Rangul unei matrice. Rezolvarea sistemelor de ecuaţii liniare. Metoda eliminării a lui Gauss
 Lector univ dr Cristin Nrte Cursul 4 Mtrice Rngul unei mtrice Rezolvre sistemelor de ecuţii linire Metod eliminării lui Guss Definiţie O mtrice m n este o serie de mn intrări, numite elemente, rnjte în
Lector univ dr Cristin Nrte Cursul 4 Mtrice Rngul unei mtrice Rezolvre sistemelor de ecuţii linire Metod eliminării lui Guss Definiţie O mtrice m n este o serie de mn intrări, numite elemente, rnjte în
π } R 4. ctg:r\{kπ} R FuncŃii trigonometrice 1. DefiniŃii în triunghiul dreptunghic 2. ProprietãŃile funcńiilor trigonometrice 1.
 Trigonometrie FuncŃii trigonometrice. DefiniŃii în triunghiul dreptunghic b c b sin B, cos B, tgb c C c ctgb, sin B cosc, tgb ctgc b b. ProprietãŃile funcńiilor trigonometrice. sin:r [-,] A c B sin(-x)
Trigonometrie FuncŃii trigonometrice. DefiniŃii în triunghiul dreptunghic b c b sin B, cos B, tgb c C c ctgb, sin B cosc, tgb ctgc b b. ProprietãŃile funcńiilor trigonometrice. sin:r [-,] A c B sin(-x)
EcuaŃii de gradul al doilea ax 2 + bx + c = 0, a,b,c R, a 0 1. Formule de rezolvare: > 0 b x =, x =, = b 2 4ac; sau
 EcuŃii de grdul l doile x + x + c = 0,,,c R, 0 Formule de rezolvre: > 0 + x =, x =, = c; su ' + ' ' ' x =, x =, =, = c Formule utile în studiul ecuńiei de grdul l II-le: x + x = (x + x ) x x = S P 3 x
EcuŃii de grdul l doile x + x + c = 0,,,c R, 0 Formule de rezolvre: > 0 + x =, x =, = c; su ' + ' ' ' x =, x =, =, = c Formule utile în studiul ecuńiei de grdul l II-le: x + x = (x + x ) x x = S P 3 x
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
sin d = 8 2π 2 = 32 π
 .. Eerciţii reolvte. INTEGRALA E UPRAFAŢĂ E AL OILEA TIP. ÂMPURI OLENOIALE. Eerciţiul... ă se clculee dd dd dd, () fiind fţ eterioră sferei + + 4. oluţie. Avem: sin θ cos φ, sin θ sin φ, cos θ, θ[, π],
.. Eerciţii reolvte. INTEGRALA E UPRAFAŢĂ E AL OILEA TIP. ÂMPURI OLENOIALE. Eerciţiul... ă se clculee dd dd dd, () fiind fţ eterioră sferei + + 4. oluţie. Avem: sin θ cos φ, sin θ sin φ, cos θ, θ[, π],
Geometria triunghiului
 Geometri triunghiului 1 I Triunghiul ritrr Fie AB A c h m l β γ B D E A 1 Geometri triunghiului Formule de z pentru triunghiuri Notm prin:,, c lungimile lturilor B, A, respectiv AB; α, β, γ mrimile unghiurilor
Geometri triunghiului 1 I Triunghiul ritrr Fie AB A c h m l β γ B D E A 1 Geometri triunghiului Formule de z pentru triunghiuri Notm prin:,, c lungimile lturilor B, A, respectiv AB; α, β, γ mrimile unghiurilor
2. Sisteme de forţe concurente...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
SEMINAR 2 SISTEME DE FRŢE CNCURENTE CUPRINS 2. Sisteme de forţe concurente...1 Cuprins...1 Introducere...1 2.1. Aspecte teoretice...2 2.2. Aplicaţii rezolvate...3 2. Sisteme de forţe concurente În acest
Integrale cu parametru
 1 Integrle proprii cu prmetru 2 3 Integrle proprii cu prmetru Definiţi 1.1 Dcă f : [, b ] E R, E R este o funcţie cu propriette că pentru orice y E, funcţi de vribilă x x f (x, y) este integrbilă pe intervlul
1 Integrle proprii cu prmetru 2 3 Integrle proprii cu prmetru Definiţi 1.1 Dcă f : [, b ] E R, E R este o funcţie cu propriette că pentru orice y E, funcţi de vribilă x x f (x, y) este integrbilă pe intervlul
Asupra unei metode pentru calculul unor integrale definite din functii trigonometrice
 Educţi Mtemtică Vol. 1, Nr. (5), 59 68 Asupr unei metode pentru clculul unor integrle definite din functii trigonometrice Ion Alemn Astrct In this pper is presented one method of clcultion for the trigonometricl
Educţi Mtemtică Vol. 1, Nr. (5), 59 68 Asupr unei metode pentru clculul unor integrle definite din functii trigonometrice Ion Alemn Astrct In this pper is presented one method of clcultion for the trigonometricl
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
CUPRINS 5. Reducerea sistemelor de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
CURS 5 REDUCEREA SISTEMELOR DE FORŢE (CONTINUARE) CUPRINS 5. Reducerea sistemelor de forţe (continuare)...... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 5.1. Teorema lui Varignon pentru sisteme
3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...4
 SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
SEMINAR 3 MMENTUL FRŢEI ÎN RAPRT CU UN PUNCT CUPRINS 3. Momentul forţei în raport cu un punct...1 Cuprins...1 Introducere...1 3.1. Aspecte teoretice...2 3.2. Aplicaţii rezolvate...4 3. Momentul forţei
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Seminar 3. Serii. Probleme rezolvate. 1 n . 7. Problema 3.2. Să se studieze natura seriei n 1. Soluţie 3.1. Avem inegalitatea. u n = 1 n 7. = v n.
 Semir 3 Serii Probleme rezolvte Problem 3 Să se studieze tur seriei Soluţie 3 Avem ieglitte = ) u = ) ) = v, Seri = v este covergetă fiid o serie geometrică cu rţi q = < Pe bz criteriului de comprţie cu
Semir 3 Serii Probleme rezolvte Problem 3 Să se studieze tur seriei Soluţie 3 Avem ieglitte = ) u = ) ) = v, Seri = v este covergetă fiid o serie geometrică cu rţi q = < Pe bz criteriului de comprţie cu
CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1
... 1 Cuprins..1") CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
CURS 3 SISTEME DE FORŢE (continuare) CUPRINS 3. Sisteme de forţe (continuare)... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 3.1. Momentul forţei în raport cu un punct...2 Test de autoevaluare
CONCURSUL NAŢIONAL DE MATEMATICĂ APLICATĂ "ADOLF HAIMOVICI" ETAPA FINALĂ - 22 mai 2010
 ETAPA FINALĂ - mi 00 BAREM DE CORECTARE CLASA A IX A. Pe o dreptă se consideră 00 puncte, cre formeză 009 segmente, fiecre de cm. Pe primul segment, desupr dreptei, construim un pătrt, pe l doile segment,
ETAPA FINALĂ - mi 00 BAREM DE CORECTARE CLASA A IX A. Pe o dreptă se consideră 00 puncte, cre formeză 009 segmente, fiecre de cm. Pe primul segment, desupr dreptei, construim un pătrt, pe l doile segment,
GEOMETRIE ANALITICĂ. Capitolul 5 VECTORI LIBERI. #1. Spaţiul vectorial al vectorilor liberi
 GEOMETRIE ANALITICĂ Cpitolul 5 VECTORI LIBERI # Spţiul vectoril l vectorilor liberi Fie E spţiul tridimensionl l geometriei elementre orientt Definiţii Pentru oricre două puncte A B E considerăm segmentul
GEOMETRIE ANALITICĂ Cpitolul 5 VECTORI LIBERI # Spţiul vectoril l vectorilor liberi Fie E spţiul tridimensionl l geometriei elementre orientt Definiţii Pentru oricre două puncte A B E considerăm segmentul
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
Vectori liberi Produs scalar Produs vectorial Produsul mixt. 1 Vectori liberi. 2 Produs scalar. 3 Produs vectorial. 4 Produsul mixt.
 liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
1. ŞIRURI ŞI SERII DE NUMERE REALE
 . ŞIRURI ŞI SERII DE NUMERE REALE. Eerciţii rezolvte Eerciţiul Stbiliţi dcă următorele şiruri sut fudmetle: ), N 5 b) + + + +, N * c) + + +, N * cos(!) d), N ( ) e), N Soluţii p p ) +p - < şi mjortul este
. ŞIRURI ŞI SERII DE NUMERE REALE. Eerciţii rezolvte Eerciţiul Stbiliţi dcă următorele şiruri sut fudmetle: ), N 5 b) + + + +, N * c) + + +, N * cos(!) d), N ( ) e), N Soluţii p p ) +p - < şi mjortul este
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
CUPRINS 2. Sisteme de forţe... 1 Cuprins..1
 CURS 2 SISTEME DE FORŢE CUPRINS 2. Sisteme de forţe.... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 2.1. Forţa...2 Test de autoevaluare 1...3 2.2. Proiecţia forţei pe o axă. Componenta forţei
CURS 2 SISTEME DE FORŢE CUPRINS 2. Sisteme de forţe.... 1 Cuprins..1 Introducere modul.1 Obiective modul....2 2.1. Forţa...2 Test de autoevaluare 1...3 2.2. Proiecţia forţei pe o axă. Componenta forţei
Axiomele geometriei în plan şi în spańiu
 xiomele geometriei în pln şi în spńiu 1 xiomele geometriei în pln şi în spńiu unoştinńele de geometrie cumulte în clsele gimnzile pot fi încdrte într-un sistem logic de propozińii mtemtice: xiome, definińii,
xiomele geometriei în pln şi în spńiu 1 xiomele geometriei în pln şi în spńiu unoştinńele de geometrie cumulte în clsele gimnzile pot fi încdrte într-un sistem logic de propozińii mtemtice: xiome, definińii,
Tit Tihon CNRV Roman FISA DE EVALUARE A UNITATII DE INVATARE. Caracteristici vizibile observate PUNCTAJ ACORDAT
 Tit Tihon CNRV Romn FISA DE EVALUARE A UNITATII DE INVATARE Nr. crt 5 6 7 8 9 0 Nr. crt Nr. crt Crcteristici vizibile observte PUNCTAJ ACORDAT preciere D+ Nu Observţii privind preciere folosire mnulului
Tit Tihon CNRV Romn FISA DE EVALUARE A UNITATII DE INVATARE Nr. crt 5 6 7 8 9 0 Nr. crt Nr. crt Crcteristici vizibile observte PUNCTAJ ACORDAT preciere D+ Nu Observţii privind preciere folosire mnulului
Profesor Blaga Mirela-Gabriela DREAPTA
 DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
DREAPTA Fie punctele A ( xa, ya ), B ( xb, yb ), C ( xc, yc ) şi D ( xd, yd ) în planul xoy. 1)Distanţa AB = (x x ) + (y y ) Ex. Fie punctele A( 1, -3) şi B( -2, 5). Calculaţi distanţa AB. AB = ( 2 1)
CINEMATICA RIGIDULUI
 CNEMATCA GDULU CNEMATCA CPULU GD CNEMATCA CPULU GD 8.. Elementele generle le mişcării corpului rigid 8.. Problemele cinemticii corpului rigid Corpul rigid este un element importnt în tehnică şi semnifică
CNEMATCA GDULU CNEMATCA CPULU GD CNEMATCA CPULU GD 8.. Elementele generle le mişcării corpului rigid 8.. Problemele cinemticii corpului rigid Corpul rigid este un element importnt în tehnică şi semnifică
CURS XI XII SINTEZĂ. 1 Algebra vectorială a vectorilor liberi
 Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
TITULARIZARE 2002 Varianta 1
 TITULARIZARE 2002 Vrint 1 A. Omotetii plne: definiţie, oricre două triunghiuri omotetice sunt semene, mulţime omotetiilor de celşi centru formeză un grup belin izomorf cu grupul multiplictiv l numerelor
TITULARIZARE 2002 Vrint 1 A. Omotetii plne: definiţie, oricre două triunghiuri omotetice sunt semene, mulţime omotetiilor de celşi centru formeză un grup belin izomorf cu grupul multiplictiv l numerelor
Anexa B2 Elemente de reprezentare grafică în plan şi în spaţiu.
 Anex B Elemente de reprezentre grfică în pln şi în spţiu. 1. Tipuri de sisteme de coordonte. Coordonte crteziene Fie xoy un sistem de coordonte crteziene în pln. Fie P un punct în pln vând coordontele
Anex B Elemente de reprezentre grfică în pln şi în spţiu. 1. Tipuri de sisteme de coordonte. Coordonte crteziene Fie xoy un sistem de coordonte crteziene în pln. Fie P un punct în pln vând coordontele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
GEOMETRIE PLANĂ TEOREME IMPORTANTE ARII. bh lh 2. abc. abc. formula înălţimii
 GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
Lucian Maticiuc SEMINAR 1 3. Capitolul I: Integrala definită. Primitive. 1. Să se arate că. f (x) dx = 0. Rezolvare:
 dx = 0. Rezolvare:") Cpitolul I: Integrl definită. Primitive Conf. dr. Lucin Mticiuc Fcultte de Hidrotehnică, Geodezie şi Ingineri Mediului Anliz Mtemtică II, Semestrul II Conf. dr. Lucin MATICIUC. Să se rte că Rezolvre: SEMINAR
Cpitolul I: Integrl definită. Primitive Conf. dr. Lucin Mticiuc Fcultte de Hidrotehnică, Geodezie şi Ingineri Mediului Anliz Mtemtică II, Semestrul II Conf. dr. Lucin MATICIUC. Să se rte că Rezolvre: SEMINAR
Algebra si Geometrie Seminar 9
 Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
Algebra si Geometrie Seminar 9 Decembrie 017 ii Equations are just the boring part of mathematics. I attempt to see things in terms of geometry. Stephen Hawking 9 Dreapta si planul in spatiu 1 Notiuni
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Sunt variabile aleatoare care iau o infinitate numărabilă de valori. Diagrama unei variabile aleatoare discrete are forma... f. ,... pn.
 86 ECUAŢII 55 Vriile letore discrete Sut vriile letore cre iu o ifiitte umărilă de vlori Digrm uei vriile letore discrete re form f, p p p ude p = = Distriuţi Poisso Are digrm 0 e e e e!!! Se costtă că
86 ECUAŢII 55 Vriile letore discrete Sut vriile letore cre iu o ifiitte umărilă de vlori Digrm uei vriile letore discrete re form f, p p p ude p = = Distriuţi Poisso Are digrm 0 e e e e!!! Se costtă că
CAPITOLUL 6 FORME LINIARE, BILINIARE ŞI PĂTRATICE. 6.1 Forme liniare
 Algebră liniră CAPITOLUL 6 FORME LINIARE, BILINIARE ŞI PĂTRATICE 6 Forme linire Fie V un spţiu vectoril peste un corp K Definiţi 6 Se numeşte formă liniră su funcţionlă liniră o plicţie f : V K cre stisfce
Algebră liniră CAPITOLUL 6 FORME LINIARE, BILINIARE ŞI PĂTRATICE 6 Forme linire Fie V un spţiu vectoril peste un corp K Definiţi 6 Se numeşte formă liniră su funcţionlă liniră o plicţie f : V K cre stisfce
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
6. METODELE GEOMETRIEI DESCRIPTIVE
 METDELE GEMETRIEI DESCRITIVE 75 6. METDELE GEMETRIEI DESCRITIVE rin etodele geoetriei descriptive se relieă odificre proiecţiilor eleentelor geoetrice din poiţiile dte în lte poiţii, prticulre fţă de plnele
METDELE GEMETRIEI DESCRITIVE 75 6. METDELE GEMETRIEI DESCRITIVE rin etodele geoetriei descriptive se relieă odificre proiecţiilor eleentelor geoetrice din poiţiile dte în lte poiţii, prticulre fţă de plnele
GEOMETRIE PLANĂ TEOREME IMPORTANTE ARII. = înălţimea triunghiului echilateral h =, R =, r = R = bh lh 2 A D ++ D. abc. abc =
 GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
GEOMETRIE PLNĂ TEOREME IMPORTNTE suma unghiurilor unui triunghi este 8º suma unghiurilor unui patrulater este 6º unghiurile de la baza unui triunghi isoscel sunt congruente într-un triunghi isoscel liniile
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
Tema: şiruri de funcţii
 Tem: şiruri de fucţii. Clculţi limit (simplă) şirului de fucţii f : [ 0,], f ( ) R Avem lim f ( 0) = ir petru 0, vem lim f ( ) Î cocluzie, dcă otăm f: [ 0, ], f ( ) =, = 0 =, 0 + + = +, tuci lim f f =..
Tem: şiruri de fucţii. Clculţi limit (simplă) şirului de fucţii f : [ 0,], f ( ) R Avem lim f ( 0) = ir petru 0, vem lim f ( ) Î cocluzie, dcă otăm f: [ 0, ], f ( ) =, = 0 =, 0 + + = +, tuci lim f f =..
Subiecte Clasa a VII-a
 lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
7. Fie ABCD un patrulater inscriptibil. Un cerc care trece prin A şi B intersectează
 TEMĂ 1 1. În triunghiul ABC, fie D (BC) astfel încât AB + BD = AC + CD. Demonstraţi că dacă punctele B, C şi centrele de greutate ale triunghiurilor ABD şi ACD sunt conciclice, atunci AB = AC. India 2014
TEMĂ 1 1. În triunghiul ABC, fie D (BC) astfel încât AB + BD = AC + CD. Demonstraţi că dacă punctele B, C şi centrele de greutate ale triunghiurilor ABD şi ACD sunt conciclice, atunci AB = AC. India 2014
CURS I II. Capitolul I: Integrala definită. Primitive. 1 Integrabilitate Riemann. Criterii de integrabilitate
 Cpitolul I: Integrl definită. Primitive Conf. dr. Lucin Mticiuc Fcultte de Hidrotehnică, Geodezie şi Ingineri Mediului Anliz Mtemtică II, Semestrul II Conf. dr. Lucin MATICIUC CURS I II Cpitolul I: Integrl
Cpitolul I: Integrl definită. Primitive Conf. dr. Lucin Mticiuc Fcultte de Hidrotehnică, Geodezie şi Ingineri Mediului Anliz Mtemtică II, Semestrul II Conf. dr. Lucin MATICIUC CURS I II Cpitolul I: Integrl
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Asupra unei inegalităţi date la barajul OBMJ 2006
 Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Se cere determinarea caracteristicilor geometrice pentru secţiunea antisimetrică din figura de mai
 Seminr 7. Crcteristici geometrice l suprfeţe plne II.. Secţiune compusă cu profile lminte jos: Se cere determinre crcteristicilor geometrice pentru secţiune ntisimetrică din figur de mi fig.1 Poziţi centrului
Seminr 7. Crcteristici geometrice l suprfeţe plne II.. Secţiune compusă cu profile lminte jos: Se cere determinre crcteristicilor geometrice pentru secţiune ntisimetrică din figur de mi fig.1 Poziţi centrului
TEMA 5: DERIVATE ŞI DIFERENȚIALE
 TEMA 5: DERIVATE ŞI DIFERENȚIALE 35 TEMA 5: DERIVATE ŞI DIFERENȚIALE Obiective: Deinire principlelor proprietăţi mtemtice le uncţiilor, le itelor de uncţii şi le uncţiilor continue Deinire principlelor
TEMA 5: DERIVATE ŞI DIFERENȚIALE 35 TEMA 5: DERIVATE ŞI DIFERENȚIALE Obiective: Deinire principlelor proprietăţi mtemtice le uncţiilor, le itelor de uncţii şi le uncţiilor continue Deinire principlelor
CAPITOLUL VII EXTINDERI ALE CONCEPTULUI DE INTEGRALĂ DEFINITĂ
 CAPITOLUL VII EXTINDERI ALE CONCEPTULUI DE INTEGRALĂ DEFINITĂ În teori Integrlei definite numită şi Integrl Riemnn, s- urmărit c, l numite funcţii rele de o vriilă relă, dte pe mulţimi din R, după o schemă
CAPITOLUL VII EXTINDERI ALE CONCEPTULUI DE INTEGRALĂ DEFINITĂ În teori Integrlei definite numită şi Integrl Riemnn, s- urmărit c, l numite funcţii rele de o vriilă relă, dte pe mulţimi din R, după o schemă
III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe
 III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe reprezintă totalitatea forțelor care acționează simultan asupra unui corp, Fig. 1. În Fig.
III. Statica III. Statica. Echilibrul mecanic al corpurilor. 1. Sistem de forțe concurente. Sistemul de forțe reprezintă totalitatea forțelor care acționează simultan asupra unui corp, Fig. 1. În Fig.
3. REPREZENTAREA PLANULUI
 3.1. GENERALITĂŢI 3. REPREZENTAREA PLANULUI Un plan este definit, în general, prin trei puncte necoliniare sau prin o dreaptă şi un punct exterior, două drepte concurente sau două drepte paralele (fig.3.1).
3.1. GENERALITĂŢI 3. REPREZENTAREA PLANULUI Un plan este definit, în general, prin trei puncte necoliniare sau prin o dreaptă şi un punct exterior, două drepte concurente sau două drepte paralele (fig.3.1).
Lectia III Produsul scalar a doi vectori liberi
 Produsul scalar: denitie, proprietati Schimbari de repere ortonormate in plan Aplicatii Lectia III Produsul scalar a doi vectori liberi Oana Constantinescu Oana Constantinescu Lectia III Produsul scalar:
Produsul scalar: denitie, proprietati Schimbari de repere ortonormate in plan Aplicatii Lectia III Produsul scalar a doi vectori liberi Oana Constantinescu Oana Constantinescu Lectia III Produsul scalar:
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
14. Grinzi cu zăbrele Metoda secţiunilor...1 Cuprins...1 Introducere Aspecte teoretice Aplicaţii rezolvate...3
 SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
SEMINAR GRINZI CU ZĂBRELE METODA SECŢIUNILOR CUPRINS. Grinzi cu zăbrele Metoda secţiunilor... Cuprins... Introducere..... Aspecte teoretice..... Aplicaţii rezolvate.... Grinzi cu zăbrele Metoda secţiunilor
Dreapta in plan. = y y 0
 Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
Dreapta in plan 1 Dreapta in plan i) Presupunem ca planul este inzestrat cu un reper ortonormat de dreapta (O, i, j). Fiecarui punct M al planului ii corespunde vectorul OM numit vector de pozitie al punctului
RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii transversale, scrisă faţă de una dintre axele de inerţie principale:,
 REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
REZISTENTA MATERIALELOR 1. Ce este modulul de rezistenţă? Exemplificaţi pentru o secţiune dreptunghiulară, respectiv dublu T. RĂSPUNS Modulul de rezistenţă este o caracteristică geometrică a secţiunii
FILTRE ACTIVE CU AMPLIFICATOARE OPERAŢIONALE
 LUCRAREA NR. 7 FILTRE ACTIVE CU AMPLIFICATOARE OPERAŢIONALE Scopul lucrării: Studiul filtrelor ctive relizte cu mplifictore operţionle prin ridicre crcteristicilor lor de frecvenţă.. Filtrele ctive Filtrele
LUCRAREA NR. 7 FILTRE ACTIVE CU AMPLIFICATOARE OPERAŢIONALE Scopul lucrării: Studiul filtrelor ctive relizte cu mplifictore operţionle prin ridicre crcteristicilor lor de frecvenţă.. Filtrele ctive Filtrele
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
ME.09 Transformate Fourier prin sinus şi cosinus
 ME.9 Trnsformte Fourier prin sinus şi cosinus Cuvinte cheie Trnsformre Fourier prin cosinus, trnsformre Fourier prin sinus, trnsformt Fourier prin sinus, trnsformt Fourier prin cosinus, formule de inversre,
ME.9 Trnsformte Fourier prin sinus şi cosinus Cuvinte cheie Trnsformre Fourier prin cosinus, trnsformre Fourier prin sinus, trnsformt Fourier prin sinus, trnsformt Fourier prin cosinus, formule de inversre,
Conice - Câteva proprietǎţi elementare
 Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Toate subiectele sunt obligatorii. Timpul de lucru efectiv este de 3 ore. Se acordă din oficiu 10 puncte. SUBIECTUL I.
 Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
1.PUNCTUL.DREAPTA.PLANUL
 1.PUNCTUL.DREPT.PLNUL 1.Punctul E=F P Q P Q 2.Drept d su drept B (d) B Semidrept O, nott [O O su (O, dic fr O 3.Segmentul B, nott [B] M B (B),[B),(B] M este mijlocul lui [B] dc M=MB=B/2 su [M] [MB](=B/2)
1.PUNCTUL.DREPT.PLNUL 1.Punctul E=F P Q P Q 2.Drept d su drept B (d) B Semidrept O, nott [O O su (O, dic fr O 3.Segmentul B, nott [B] M B (B),[B),(B] M este mijlocul lui [B] dc M=MB=B/2 su [M] [MB](=B/2)
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
2.3 Geometria analitică liniarăînspaţiu
 2.3 Geometria analitică liniarăînspaţiu Pentru început sădefinim câteva noţiuni de bază în geometria analitică. Definitia 2.3.1 Se numeşte reper în spaţiu o mulţime formată dintr-un punct O (numit originea
2.3 Geometria analitică liniarăînspaţiu Pentru început sădefinim câteva noţiuni de bază în geometria analitică. Definitia 2.3.1 Se numeşte reper în spaţiu o mulţime formată dintr-un punct O (numit originea
cateta alaturata, cos B= ipotenuza BC cateta alaturata AB cateta opusa AC
 .Masurarea unghiurilor intr-un triunghi dreptunghic sin B= cateta opusa ipotenuza = AC BC cateta alaturata, cos B= AB ipotenuza BC cateta opusa AC cateta alaturata AB tg B=, ctg B= cateta alaturata AB
.Masurarea unghiurilor intr-un triunghi dreptunghic sin B= cateta opusa ipotenuza = AC BC cateta alaturata, cos B= AB ipotenuza BC cateta opusa AC cateta alaturata AB tg B=, ctg B= cateta alaturata AB
CAPITOLUL 1. ELEMENTE DE ALGEBRA
 CAPITOLUL. ELEMENTE DE ALGEBRA. Mulţimi Definiţi.. (Cntor) Prin mulţime se înţelege un nsmlu de oiecte ine determinte şi distincte, cre formeză o entitte. Oiectele cre formeză o mulţime se numesc elementele
CAPITOLUL. ELEMENTE DE ALGEBRA. Mulţimi Definiţi.. (Cntor) Prin mulţime se înţelege un nsmlu de oiecte ine determinte şi distincte, cre formeză o entitte. Oiectele cre formeză o mulţime se numesc elementele
Concurs MATE-INFO UBB, 1 aprilie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
Ecuatii trigonometrice
 Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
ANALIZĂ MATEMATICĂ pentru examenul licenţă, manual valabil începând cu sesiunea iulie 2013 Specializarea Matematică informatică coordonator: Dorel I.
 ANALIZĂ MATEMATICĂ pentru exmenul licenţă, mnul vlbil începând cu sesiune iulie 23 Specilizre Mtemtică informtică coordontor: Dorel I. Duc Cuprins Cpitolul. Serii de numere rele. Noţiuni generle 2. Serii
ANALIZĂ MATEMATICĂ pentru exmenul licenţă, mnul vlbil începând cu sesiune iulie 23 Specilizre Mtemtică informtică coordontor: Dorel I. Duc Cuprins Cpitolul. Serii de numere rele. Noţiuni generle 2. Serii
1.3 Baza a unui spaţiu vectorial. Dimensiune
 .3 Baza a unui spaţiu vectorial. Dimensiune Definiţia.3. Se numeşte bază a spaţiului vectorial V o familie de vectori B care îndeplineşte condiţiile de mai jos: a) B este liniar independentă; b) B este
.3 Baza a unui spaţiu vectorial. Dimensiune Definiţia.3. Se numeşte bază a spaţiului vectorial V o familie de vectori B care îndeplineşte condiţiile de mai jos: a) B este liniar independentă; b) B este
SERII NUMERICE. Definiţia 3.1. Fie (a n ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0
 n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0") SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
CURS MECANICA CONSTRUCŢIILOR
 CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
CURS 10+11 MECANICA CONSTRUCŢIILOR Conf. Dr. Ing. Viorel Ungureanu CINEMATICA SOLIDULUI RIGID In cadrul cinematicii punctului material s-a arătat ca a studia mişcarea unui punct înseamnă a determina la
CONCURSUL NAŢIONAL DE MATEMATICĂ APLICATĂ "ADOLF HAIMOVICI"
 INSPECTORATUL ŞCOLAR JUDEŢEAN IAŞI CONCURSUL NAŢIONAL DE MATEMATICĂ APLICATĂ "ADOLF HAIMOVICI" ETAPA JUDEŢEANĂ 8 mrtie 04 Profil rel, specilizre ştiinţele nturii FACULTATEA CONSTRUCŢII DE MAŞINI ŞI MANAGEMENT
INSPECTORATUL ŞCOLAR JUDEŢEAN IAŞI CONCURSUL NAŢIONAL DE MATEMATICĂ APLICATĂ "ADOLF HAIMOVICI" ETAPA JUDEŢEANĂ 8 mrtie 04 Profil rel, specilizre ştiinţele nturii FACULTATEA CONSTRUCŢII DE MAŞINI ŞI MANAGEMENT
CERCUL LUI EULER ŞI DREAPTA LUI SIMSON
 CERCUL LUI EULER ŞI DREAPTA LUI SIMSON ABSTRACT. Articolul prezintă două rezultate deosebite legate de patrulaterul inscriptibil şi câteva consecinţe ce decurg din aceste rezultate. Lecţia se adresează
CERCUL LUI EULER ŞI DREAPTA LUI SIMSON ABSTRACT. Articolul prezintă două rezultate deosebite legate de patrulaterul inscriptibil şi câteva consecinţe ce decurg din aceste rezultate. Lecţia se adresează
Cap. I NOŢIUNI FUNDAMENTALE DESPRE VECTORI
 Cap. I NOŢIUNI FUNDAMENTALE DESPRE VECTORI In mecanică există mărimi scalare sau scalari şi mărimi vectoriale sau vectori. Mărimile scalare (scalarii) sunt complet determinate prin valoarea lor numerică
Cap. I NOŢIUNI FUNDAMENTALE DESPRE VECTORI In mecanică există mărimi scalare sau scalari şi mărimi vectoriale sau vectori. Mărimile scalare (scalarii) sunt complet determinate prin valoarea lor numerică
Punţi de măsurare. metode de comparaţie: masurandul este comparat cu o mărime etalon de aceeaşi natura;
 Punţi de măsurre metode de comprţie: msurndul este comprt cu o mărime etlon de ceeşi ntur; punte: reţe complet cu 4 noduri: brţe: 4 impednţe digonl de limentre: surs (tensiune, curent) digonl de măsurre:
Punţi de măsurre metode de comprţie: msurndul este comprt cu o mărime etlon de ceeşi ntur; punte: reţe complet cu 4 noduri: brţe: 4 impednţe digonl de limentre: surs (tensiune, curent) digonl de măsurre:
5.6. Funcţii densitate de probabilitate clasice
 Elemente de sttistică 5.6. Funcţii densitte de probbilitte clsice 5.6.. Introducere L or ctulă eistă un număr mre de funcţii msă de probbilitte şi funcţii densitte de probbilitte ce crcterizeză diferite
Elemente de sttistică 5.6. Funcţii densitte de probbilitte clsice 5.6.. Introducere L or ctulă eistă un număr mre de funcţii msă de probbilitte şi funcţii densitte de probbilitte ce crcterizeză diferite
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii Breviar teoretic 8 ianuarie ianuarie 2011
 Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
y y x x 1 y1 Elemente de geometrie analiticã 1. Segmente 1. DistanŃa dintre douã puncte A(x 1,y 1 ), B(x 2,y 2 ): AB = 2. Panta dreptei AB: m AB =
, B(x 2,y 2 ): AB = 2. Panta dreptei AB: m AB =") Elemente de geometrie analiticã. Segmente. DistanŃa dintre douã puncte A(, ), B(, ): AB = ) + ( ) (. Panta dreptei AB: m AB = +. Coordonatele (,) ale mijlocului segmentului AB: =, =. Coordonatele punctului
Elemente de geometrie analiticã. Segmente. DistanŃa dintre douã puncte A(, ), B(, ): AB = ) + ( ) (. Panta dreptei AB: m AB = +. Coordonatele (,) ale mijlocului segmentului AB: =, =. Coordonatele punctului
Integrale generalizate (improprii)
") Integrle generlizte (improprii) Fie f : [, ] R, definită prin =, α > 0. Pentru u, funţi α f este integrilă pe intervlul [, u] şi u ln α+ α+ u u = ( α)u α α, α = ln u, α =. Dă treem l limită pentru u oţinem
Integrle generlizte (improprii) Fie f : [, ] R, definită prin =, α > 0. Pentru u, funţi α f este integrilă pe intervlul [, u] şi u ln α+ α+ u u = ( α)u α α, α = ln u, α =. Dă treem l limită pentru u oţinem
Cum folosim cazuri particulare în rezolvarea unor probleme
 Cum folosim cazuri particulare în rezolvarea unor probleme GHEORGHE ECKSTEIN 1 Atunci când întâlnim o problemă pe care nu ştim s-o abordăm, adesea este bine să considerăm cazuri particulare ale acesteia.
Cum folosim cazuri particulare în rezolvarea unor probleme GHEORGHE ECKSTEIN 1 Atunci când întâlnim o problemă pe care nu ştim s-o abordăm, adesea este bine să considerăm cazuri particulare ale acesteia.
Lectia VII Dreapta si planul
 Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
Planul. Ecuatii, pozitii relative Dreapta. Ecuatii, pozitii relative Aplicatii Lectia VII Dreapta si planul Oana Constantinescu Oana Constantinescu Lectia VII Planul. Ecuatii, pozitii relative Dreapta.
5.5. REZOLVAREA CIRCUITELOR CU TRANZISTOARE BIPOLARE
 5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
5.5. A CIRCUITELOR CU TRANZISTOARE BIPOLARE PROBLEMA 1. În circuitul din figura 5.54 se cunosc valorile: μa a. Valoarea intensității curentului de colector I C. b. Valoarea tensiunii bază-emitor U BE.
CALCULUL RETELELOR TRIFAZATE NESIMETRICE
 7... CALCLL RETELELOR TRIFAZATE NESIMETRICE 7... Meto componentelor simetrice Clculul unor regimuri e vrie nesimetrice cre pr in timpul functionrii sistemelor trifzte (scurtcircuite, intreruperi e fz s..)
7... CALCLL RETELELOR TRIFAZATE NESIMETRICE 7... Meto componentelor simetrice Clculul unor regimuri e vrie nesimetrice cre pr in timpul functionrii sistemelor trifzte (scurtcircuite, intreruperi e fz s..)