др Драган Алексендрић, ванредни професор, МФ Бгд др Вељко Поткоњак, редовни професор, ЕТФ Бгд др Бојан Бабић, редовни професор, МФ Бгд
|
|
|
- Έρασμος Μαρκόπουλος
- 7 χρόνια πριν
- Προβολές:
Transcript

1 Универзитет у Београду Машински факултет Kатедра за производно машинство Јавна одбрана докторске дисертације Кандидат: Најдан Вуковић, дипл.маш.инж. Београд, године Развој машинског учења интелигентног мобилног Комисијa за оцену и одбрану: робота базиран на систему вештачких неуронских мрежа др Зоран Миљковић, редовни професор, МФ Бгд, ментор др Драган Милутиновић, редовни професор, МФ Бгд др Вељко Поткоњак, редовни професор, ЕТФ Бгд др Бојан Бабић, редовни професор, МФ Бгд др Драган Алексендрић, ванредни професор, МФ Бгд
2 Садржај 1. Увод интелигентни технолошки систем, унутрашњи транспорт у технолошком окружењу,еволуција роботике, аутоматски вођена робоколица; 2. Мобилни роботи 3. Машинско учење - вештачке неуронске мреже са радијалним активационим функцијама Гаусовог типа, алгоритми оптимизације параметара (линеаризовани Калманов филтар, линеаризовани информациони филтар, алгоритам специфичне апроксимације момената Гаусове расподеле); 4. Интелигентни (индустријски) мобилни роботи у интелигентним технолошким системима - симултано оцењивање (естимација) положаја мобилног робота и карактеристичних објеката у окружењу, аквизиција информација од камере, хибридна управљачка архитектура, хибридно управљање мобилним роботом; 5. Закључак и правац будућих истраживања 2/77
3 Садржај 1. Увод интелигентни технолошки систем, унутрашњи транспорт у технолошком окружењу,еволуција роботике, аутоматски вођена робоколица; 2. Мобилни роботи 3. Машинско учење - вештачке неуронске мреже са радијалним активационим функцијама Гаусовог типа, алгоритми оптимизације параметара (линеаризовани Калманов филтар, линеаризовани информациони филтар, алгоритам специфичне апроксимације момената Гаусове расподеле); 4. Интелигентни (индустријски) мобилни роботи у интелигентним технолошким системима - симултано оцењивање (естимација) положаја мобилног робота и карактеристичних објеката у окружењу, аквизиција информација од камере, хибридна управљачка архитектура, хибридно управљање мобилним роботом; 5. Закључак и правац будућих истраживања 3/77
4 Интелигентни тенолошки системи - ИТС - Највиша класа флексибилних технолошких система; - Синергија вештачке интелигенције (ВИ) и рачунарски интегрисаних технологија (РИТ); - Увођење интелигентног мобилног робота (ИМР) у ИТС подразумева: 1. Анализу постојећих производних капацитета; 2. Интеграцију ИМР са РИТ концептом. ИТС (ВИ РИТ(CAD CAM CAQ CAPP ФТС(МА ИР Р)) Ниво механичке интеграције Ниво комуникационе интеграције Ниво интеграције преко знања 4/77
5 ИТС (ВИ РИТ(CAD CAM CAQ CAPP ФТС(МА ИР Р)) Интеграција ВИ и РИТ треба да резултира следећим особинама ИТС-а: - Аутономност према нивоу сталног надзора и контроле од стране оператера, односно његовог присуства и утицаја; - Децентрализација полазни проблем је рашчлањен на више елементарних проблема; - Флексибилност у погледу измене полазног проблема; - Поузданост обављање основне функције без бојазни о евентуалној грешки у систему која може значајно да угрози функционисање самог система; - Ефикасност остваривање предвиђених циљева; - Способност учења перформансе ИТС-а могу бити значајно побољшане уколико би се систему омогућила способности учења и закључивања. 5/77
6 Унутрашњи транспорт у технолошким системима - Унутрашњи транспорт материјала дефинисан је као кретање, складиштење, заштита и управљање материјалом у току процеса производње. - Трошкови управљања материјалом су реда величине 20-25% укупне цене рада радника што потврђује значај проблема унутрашњег транспорта. - У том смислу, у овој тези је посебан акценат дат унутрашњем транспорту материјала и примени индустријских мобилних робота у ове сврхе. 1. Бабић, Б., Миљковић З., Нешић Н., Управљање технолошким информацијама у предузећу BUCK Београд, Београд Бабић, Б., Миљковић З., Бојовић Б., Вуковић Н., Снимање рада и одговарајућих технолошких времена линија за производњу лименки у компанији АД ФМП Београд, Београд /77

7 Унутрашњи транспорт у технолошким системима Шта се транспортује? - Сировине - Полуфабрикати - Материјали - Готови делови Тренутно стање: - Виљушкар - Ручни виљушкар - Линијски транспортер - Аутоматски вођена робоколица (АВР) Интелигентни индустријски мобилни роботи (ИМР) 7/77
8 Еволуција роботике узми и постави (Pic and Place) узми и понеси (Fetch and Carry) 8/77
9 Узми и понеси - Узми и понеси технолошки задатак подразумева следеће способности мобилног робота: 1. Мобилни робот у сваком тренутку зна свој положај и положај објеката у радном окружењу у односу на произвољно изабрани спољашњи координатни систем; 2. Аквизицијом информација од сензора, процесирањем и интерпретацијом, мобилни робот може да детектује и препозна карактеристичне објекте; 3. У сваком тренутку, мобилни робот може да самостално дефинише путању кретања и спроведе планирано кретање у складу са задатим технолошким задатком; 4. Итеративно понављање поменутих способности се подразумева. 9/77
10 Садржај 1. Увод интелигентни технолошки систем, унутрашњи транспорт у технолошком окружењу,еволуција роботике, аутоматски вођена робоколица; 2. Мобилни роботи модел кретања и модел перцепције; 3. Машинско учење - вештачке неуронске мреже са радијалним активационим функцијама Гаусовог типа, алгоритми оптимизације параметара (линеаризовани Калманов филтар, линеаризовани информациони филтар, алгоритам специфичне апроксимације момената Гаусове расподеле); 4. Интелигентни (индустријски) мобилни роботи у интелигентним технолошким системима - симултано оцењивање (естимација) положаја мобилног робота и карактеристичних објеката у окружењу, аквизиција информација од камере, хибридна управљачка архитектура, хибридно управљање мобилним роботом; 5. Закључак и правац будућих истраживања 10/77
11 Модел кретања мобилног робота: x xy T - Три степена слободе кретања p( x x, u ) 1 - Густина расподеле x scos( /2) x x 1 x y ssin( /2) 1 sd sl sd s l cos( ) x 2 2b sd sl sd sl y sin( ) 2 2b 1 sd s l b ( sd, sl ) ( x, y, ) b - пређени пут десног и левог погонског точка респективно, - померај - размак између точкова 11/77


12 12 12/77 /77 ( ( ) ) S S S P W h R p r m ), tan2( ) ( ) ( 2 2 s r j jx jy jy jx n t n t n t s x m y m a y m x m s r Модели перцепције Модели перцепције: LEGO Mindstorms NXT Сензори растојања Khepera II Систем препознавања на бази калибрисане камере
13 Садржај 1. Увод интелигентни технолошки систем, унутрашњи транспорт у технолошком окружењу,еволуција роботике, аутоматски вођена робоколица; 2. Мобилни роботи 3. Машинско учење - вештачке неуронске мреже са радијалним активационим функцијама Гаусовог типа, алгоритми оптимизације параметара (линеаризовани Калманов филтар, линеаризовани информациони филтар, алгоритам специфичне апроксимације момената Гаусове расподеле); 4. Интелигентни (индустријски) мобилни роботи у интелигентним технолошким системима - симултано оцењивање (естимација) положаја мобилног робота и карактеристичних објеката у окружењу, аквизиција информација од камере, хибридна управљачка архитектура, хибридно управљање мобилним роботом; 5. Закључак и правац будућих истраживања 13/77
14 Машинско учење - Формирање математичко-софтверског модела проблема на основу прикупљеног скупа података о перформансама система/процеса; x i y i n x ny Скуп експерименталних података/парова за обучавање y i f x i y N w hx, а i ij i j1 f g Вештачка неуронска мрежа... надгледано машинско учење... 14/77
15 Примери примене вештачких неуронских мрежа/машинског учења: Регресија (зависна променљива је континуална) Класификација (зависна променљива је дискретна) y n y i y 1,1 ; y 0,1 i i 15/77
16 Вештачка неуронска мрежа са радијалним активационим функцијама Гаусовог типа 1 h x x μ x μ 2 j T i exp 2 i j i j - Основна разлика између (вишеслојног) перцептрона и вештачке неуронске мреже са радијалним активационим функцијама Гаусовог типа - Радијалне активационе функције су базиране на успостављању сличности између елемената улазног скупа података. 16/77
17 Оптимизација параметара вештачке неуронске мреже са Гаусовим активационим функцијама машинско учење - Линеарни динамички систем у дискретном облику: λ λ ε 1 1 y g λ x ω, 1 Вектор стања: g λ, 1 x ε ~ N ε, Q ω ~ N ω, R T T T T T T T T T T T T 1 2 i 1 2 J 1 2 J Бели шум λ w t w w w μ μ μ T Усваја се да: T E ˆ ; E ˆ ˆ λ λ λ λ λ λ P E ε 0 ; E ε ε Q T 1, 1 E ω 0 ; E ω ω R T 1, 1 17/77
18 Алгоритам линеаризованог Калмановог филтра: 1. Алгоритам ЛКФ_РГАФ ( λˆ, P, x, y ) diag T 2. E λ λˆ ; E λ λˆ λ λˆ P Q diag dim λ ; R dim y 4. while Er Er λˆ min λˆ P P Q yˆ g λˆ, x 1 i 8. H ˆ λy wg(, ) μg(, ) g(, ) 1 9. K P H ( H P H R) T T λˆ λˆ K ( y yˆ ) P ( I K H ) P 1 T y gλ x y g λ x Er 2I ˆ, ˆ, return λˆ endwhile, P 18/77
19 Алгоритам линеаризованог информационог филтра: 1. Алгоритам ЛИФ_РАФ( λˆ, P, x, y ) ˆ ˆ ˆ diag min E λ λ ; E λ λ λ λ Ι 3. Q diag dim λ ; R dim y 4. while Er Er λˆ λˆ 7. yˆ g λˆ, x Ι Ι Q 1 i H ˆ λy wg( ) μg( ) g( ) T 1 Ι Ι H R H 1 1 T 1 K Ι H R λˆ λˆ K y yˆ 1 T y gλ x y g λ x Er 2I ˆ, ˆ, return λˆ endwhile, Ι T 1 19/77
20 Алгоритам специфичне апроксимације момената Гаусове расподеле: 1. Алгоритам АСАМ_РАФ( λˆ, P, x, y ) diag T 2. E ˆ ; E ˆ ˆ λ λ λ λ λ λ P Q diag dim λ ; R dim y 4. while Er Ermin 5. λˆ λˆ, P P Q ˆ ˆ ˆ Σ λ λ P λ P, Ψ g Σ, x i i, 1 x 2dim m ˆ W i i, 1 1 x i1 7. yˆ Ψ E g λ, 8. x x ˆ ˆ 2dim yy ˆ ˆ Wi i, 1 i, 1 i1 P Ψ y Ψ y R ˆ ˆ, 1 2dim T ˆ W ˆ i i i λ ˆ ˆ ˆˆ y λy yy i1 9. P Σ λ Ψ y, K P P 10. λˆ λˆ K ( y yˆ ), P P K P K 1 T y gλ x y g λ x Er 2I ˆ, ˆ, return λˆ endwhile, P T 1 yy ˆ ˆ T i 1 20/77
21 Конвергенција грешке учења (ЛКФ, ЛИФ и АСАМ): 21/77
22 Предикција изгледа сегмента обрађене површине: 22/77
23 Дискусија: - Да би се оценила употребна вредност развијених алгоритама машинског учења, изабране вештачке неуронске мреже су тестиране на стандардним скуповима података који представљају реалне проблеме регресије/класификације из различитих домена. - Параметри ЛКФ-а, ЛИФ-а и АСАМ-а λ 0 0 Почетни вектор стања Q Матрица шума система P 0 0 Почетна матрица коваријанси R Матрица шума мерења одређују: почетну тачку процеса оцењивања, почетно знање/незнање о систему, промену система током времена и поверење у информације које систем прима из окружења; - Алгоритми су секвенцијалног типа - омогућено и on line машинско учење; - Ова предност је искоришћена током решавања проблема симултаног оцењивања положаја мобилног робота и карактеристичних објеката у окружењу. 23/77
24 Садржај 1. Увод интелигентни технолошки систем, унутрашњи транспорт у технолошком окружењу,еволуција роботике, аутоматски вођена робоколица; 2. Мобилни роботи 3. Машинско учење - вештачке неуронске мреже са радијалним активационим функцијама Гаусовог типа, алгоритми оптимизације параметара (линеаризовани Калманов филтар, линеаризовани информациони филтар, алгоритам специфичне апроксимације момената Гаусове расподеле); 4. Интелигентни (индустријски) мобилни роботи у интелигентним технолошким системима - симултано оцењивање (естимација) положаја мобилног робота и карактеристичних објеката у окружењу, аквизиција информација од камере, хибридна управљачка архитектура, хибридно управљање мобилним роботом; 5. Закључак и правац будућих истраживања 24/77
25 Симултано оцењивање положаја мобилног робота и карактеристичних објеката - Simultaneous Localization and Mapping (SLAM) - Concurrent Localization and Mapping (CLAM) Основна идеја: Да ли је могуће поставити мобилни робот у потпуно непознато окружење, на непознату позицију са непознатом оријентацијом, а да робот самостално започне постепено оцењивање положаја карактеристичних објеката у окружењу, у, на основу чега ће истовремено и вршити одређивање сопственог положаја? 25/77
26 Напомена: аквизиција сензорске информације врши се између робота и карактеристичног објекта; Непознате величине: Вектор положаја мобилног робота и вектор положаја карактеристичних објеката. p( x, m z, u, x ) 0: o: 0 26/77
27 Опште решење дато преко Бајесовог филтра: - Корак предикције p( x, m z, u, x ) p( x x, u ) p( x, m z, u ) dx 0: 1 0: : 1 0: Корак корекције: p( x, m z, u, x ) 0: 0: 0 p( z x, m) p( x, m z, u, x ) 0: 1 0: 0 p( z z, u ) 0: 1 0: Напомене: 1. p( x, m z, u, x ) p( x z, u, x ) p( m z, u, x ) 0: 0: 0 0: 0: 0 0: 0: 0 2. p( x m, z, u, x ) 0: o: 0 p( m x, z, u, x ) 0: o: 0 - Локализација (одређивање положаја мобилног робота) - Изградња мапе окружења (одређивање положаја карактеристичних објеката) 27/77
28 Алгоритам линеаризованог Калмановог филтра: Вектор стања: T x xr m x x y T T r r r r m m m m m N N x y x y... mx my Модел кретања: p( x x1, u ) x f( x1, u ) w Сензорски модел: p( z x, m) z h( x, m) v T... шумови су адитивни, некорелисани и подлежу Гаусовој расподели... T 1. Алгоритам ЛКФ ( x, P, u, z ) xr, vt cos( r, t) 2. ˆ x 1 f( x1, u ) yr, vt sin( r, t) r, t 3. C diag(, ) ; Rdiag(,, ) u v r s P f P f f C T xx, 1 x xx, 1 x u ( m x ) ( m y ) 7. zˆ ; H z atan 2( mjy yr,, mjx xr, ) r, 1 8. K P H ( H P H R) 9. i i i for all observed features z r do if landmar has beenseen before xˆ 2 2 i jx r, jy r, i i ˆ x i T i it t 1 1 ˆ i i i x 1 K z z 10. P ( I K H ) P 11. u i i 1 T u f T ( ˆ ) else augment state vector x with new feature i i mˆ j, x r cos(, ) r i i 12. m ( ˆ ˆ ˆ n mn xr, 1, z ) m j, y x 1 r sin( r, ) mˆ js, 0 Px x, 1 0 T 13. Pxx, 1 Jaug J aug 0 R I Jaug 0 I 0 xm n 0 zm n 15. endif end for 18. return xˆ, P 28/77
29 29/77
30 Резултати симулације: Оцењена путања и стварна путања мобилног робота 30/77
31 Оцена грешке положаја и 2σ границе за оцену грешке положаја (95% интервал поверења). x xˆ u u u s bias 31/77
32 Оцена конзистентности филтра ˆ 1 1 ( ) T T x x P ( x x ) x P x ˆ Нормализована грешка оценивања n n x 2 x ~ n, x, x Тест се спроводи за произвољан број Монте Карло симулационих понављања N: 1 N i N i 1 P 0,05 ; N 50 min max H 0 1 ; min max, min max 2,36 ; 3,72 32/77
33 1. ЛКФ постаје оптимистичан Нереално решење Утицај конструктивних карактеристика 33/77
34 Алгоритам неуронског линеаризованог Калмановог филтра - НЛКФ -Линеаризовани Каманов филтар почива на претпоставкама белог шума у моделу кретања и сензорском моделу мобилног робота; -ЛКФ подцењује грешку оценивања - постаје оптимистичан; -Оптималност филтра директно утиче на тачност; -Примери немоделираних утицаја су: обојени шум у управљачком систему, проклизавање точкова мобилног робота у току кретања и грешке одометрије; - Математички модели не могу обухватити све аспекте проблема: изразита нелинеарност или промена неких ефективних параметара мобилног робота (ефективни пречник точка или ефективни размак између точкова) мењају основне претпоставке на којима почива нелинеарна верзија Калмановог филтра. 34/77
35 Алгоритам неуронског линеаризованог Калмановог филтра - НЛКФ xˆ v( 1) fm (, ) x vnet ˆ ˆ ˆ x 1 xw( 1) xw( 1) xˆ xˆ m( 1) m( 1) - Увођење вештачке неуронске мреже за моделирање непознатих утицаја x g( xˆ, xˆ, u ) - Вештачка неуронска мрежа VNET v( -1-1 ) w( -1-1 ) x x x x T T T T [( v) ( w) ( m) ] Проширивање вектора стања и матрице коваријанси P P P P P P P P P P xx xw xm wx ww wm mx mw mm Основне претпоставке ЛКФ-а и даље важе... 35/77
36 Алгоритам неуронског линеаризованог Калмановог филтра: НЛКФ је развијен за сигмоидну активацину функцију ξ x 1 exp 2x 1 exp 2x као и радијалну активациону функцију Гаусовог типа 1 ξ x exp x μ 2 2 i...тј. НЛКФ-ВП и НЛКФ-РАФ... i 2 1. Алгоритам НЛКФ ( x, P, u, z ) xr, vt cos( r, t) 2. ˆ x 1 f( x1, u ) yr, vt sin( r, t) g w1, x1, u r, t uf( ) ug( ) 3. uf, u diag( 2, 2 0 C ) ; R diag( 2, 2, 2) v r s 0 T T 4. P f P f f C f xx, 1 xˆ xx, 1 xˆ u u u i i i for all observed features z r do if landmar has been seen before 2 2 ( mjx xr, ) ( mjy y, ) i r 7. zˆ ; a tan 2( mjy yr,, mjx xr, ) r, i i 8. H ˆ xz ( ) ( ) ( ) x h r x h w x h m i T i it 1 9. K P H ( H P H R) xˆ xˆ K ( z zˆ ) i i i P ( I K H ) P 12. else i i m m ( xˆ mˆ jx,, z ) m ˆ, ˆ m js, P J 14. end if 15. end for 16. return xˆ, P T n n r, 1 j, y xx, 1 aug Pxx, R J 36/77 T aug
37 Тестиране архитектуре: 37/77
38 1. НЛКФ-ВП (једнослојне ВНМ) 2. НЛКФ-ВП (двослојне ВНМ) 3. НЛКФ-РАФ 4. ЛКФ 38/77
39 Дискусија - Неизбежно је да ЛКФ подцени грешку, услед чега постаје оптимистичан; - Проблем представљају и конструктивне карактеристике мобилног робота које значајно могу да утичу на управљачку команду; - Да би компензовали овај утицај конструкције на процес оцењивања положаја током кретања, развијен је нови вид линеаризованог Калмановог филтра интегрисан са вештачком неуронском мрежом; - Монте Карло симулација показала је да је нормализована грешка оцењивања мања код НЛКФ оцена (без обзира на тип филтра НЛКФ-ВП или НЛКФ-РАФ); - Приликом поновне детекције карактеристичних објеката (затварање петље), НЛКФ генерише боље оцене грешке, па самим тим и остаје у оквиру граница одређених бројем независних Монте Карло понављања. 39/77

40 Симултано оцењивање положаја мобилног робота и карактеристичних објеката уз примену система препознавања на бази калибрисане камере - Симулација => Реални свет - Применити НЛКФ-а на мобилном роботу; - Искористити предности НЛКФ-а у експерименталном процесу; - Моделирање непознатих недетерминистичких утицаја у реалном времену модификацијом параметара вештачке неуронске мреже 40/77
41 Модел инфинитезимално малог отвора бленде (pinhole camera) 41/77
(1 1rd 2rd ) h u 2 4 v u v d v 0 ( vd v0 )(1 1rd 2rd ) r ( d ( u u )) ( d ( v v )) 2 2 d x")
 2 4 u d 1 d 2 d r ( d ( u u )) ( d ( v v )) 2 2 u x u 0 y u 0 S S S h R ( ( pr ) m) P W")
42 Модел радијалне дисторзије Модел реципрочне удаљености карактеристичних објеката 2 4 u u u d u 0 ( ud u0 )(1 1rd 2rd ) h u 2 4 v u v d v 0 ( vd v0 )(1 1rd 2rd ) r ( d ( u u )) ( d ( v v )) 2 2 d x d 0 y d 0 ( uu u0 ) 2 4 u d u u u 0 (1 1rd 2rd ) h d v d v u v 0 ( vu v0) 2 4 (1 1rd 2rd ) r r (1 r r ) 2 4 u d 1 d 2 d r ( d ( u u )) ( d ( v v )) 2 2 u x u 0 y u 0 S S S h R ( ( pr ) m) P W 42/77

43 - Карактеристични објекат представља објекат у равни слике који се на неки оптималан начин разликује од осталих; 43/77
; - део слике димензија (20 [pxl] х 20 [pxl]), где је идентификовани објекат у центру. Тј.")
44 Дефинисање карактеристичних објеката у меморији филтра: - позиција у равни слике - (u,v) координате (дефинисана применом алгоритма препознавања); - део слике димензија (20 [pxl] х 20 [pxl]), где је идентификовани објекат у центру. Тј. вектор мерења је: z i u v s i i i T 44/77

45 Предикција изгледа карактеристичног објекта након помераја 45/77
 - RS232 (мобилни робот и рачунар) - USB (камера и рачунар)")
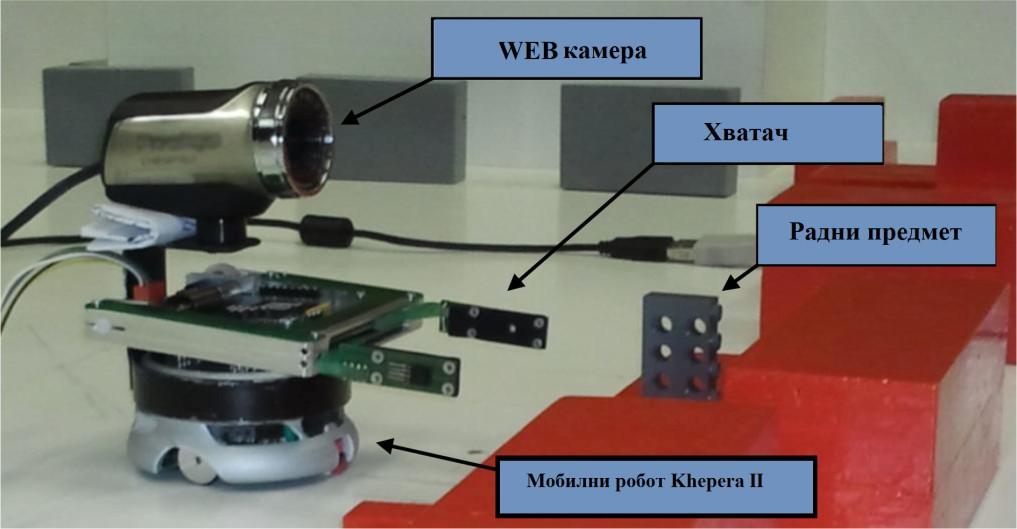
46 Експериментални резултати - Мобилни робот Khepera II - USB камера (320х240) - Десктоп рачунар (2,20 GHz; 1 GB RAM) - RS232 (мобилни робот и рачунар) - USB (камера и рачунар) 46/77
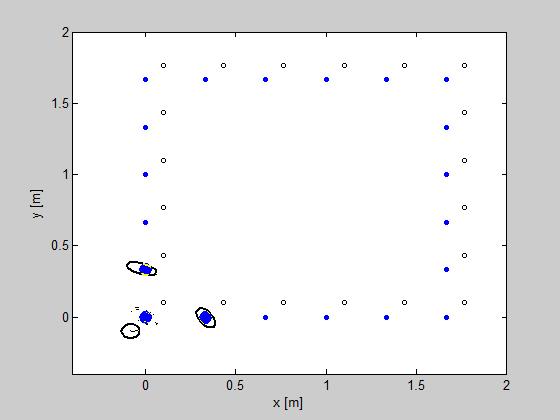
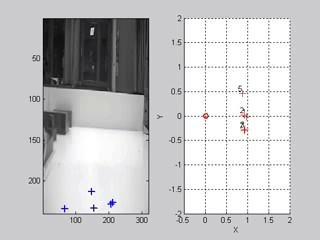
47 Неуронски линеаризовани Калманов филтар- експериментални резултати - Са леве стране су дате НЛКФ оцене позиција свих карактеристичних објеката - Са десне стране је НЛКФ оцена положаја мобилног робота 47/77
48 Упоредни приказ НЛКФ, ЛКФ и одометријских оцена положаја мобилног робота (путање) T e ( rfilt rstv ) ( rfilt rstv ) 48/77
49 Промена излазног вектора ВНМ: -Оцена грешке између механичког модела кретања и стварног кретања мобилног робота; 49/77
50 50/77
51 Дискусија - Неуронски линеаризовани Калманов филтар омогућује on line модификацију параметара вештачке неуронске мреже (машинско учење) током експлоатације мобилног робота; - Претпоставља се да вештачка неуронска мрежа може да научи (оцени) нелинеарну везу која постоји између стања мобилног робота и управљачких величина; - Информације о овој функционалној зависности се налазе у параметрима вештачке неуронске мреже; - Експериментални резултати потврђују да НЛКФ у идентичним контролисаним условима генерише оцену положаја мобилног робота више тачности од ЛКФ-а и одометрије. 51/77
52 Еволуција роботике 52/77



53 Диспозициони план производног предузећа Монтпројект Миљковић, З., Милановић Д, Нешић Н., Стошић Д., Милановић С., Пројектовање производних процеса у предузећу Монтпројект, Београд /77
54 Нова хибридна управљачка архитектура 54/77
55 LEGO Mindstorms NXT - Ecole Polytechnique Fédérale de Lausanne (EPFL) - The Robotics Institute - Carnegie Mellon University - University of Achen - University of Zurich - 55/77

56 Експериментални резултати 56/77

57 Експериментални резултати 57/77

58 Експериментални резултати 58/77
59 Нови хибридни алгоритам за управљање мобилним роботима на основу повратне информације од камере УОИК управљање на основу повратне информације од камере УОП управљање на основу положаја НЛКФ неуронски линеаризовани Калманов филтар p u x, y, v, T T - Вектор стања - Управљања 59/77
60 - Транспортни задатак раздвојен је на два дела: - глобално управљање (од тренутног положаја до положаја непосредно испред машине алатке или међускладишта) и - локално управљање (од положаја непосредно испред машине алатке или међускладишта до саме машине алатке или међускладипта). - Елиминисана потреба за транспортном инфраструктуром у виду жица или карактеристичних маркера; Елиминисана потреба за информацијом о положају и облику свих објеката у оквиру посматраног технолошког окружења; - Предност: промена распореда машина алатки или међускладишта, 60/77

61 Основна идеја: a) Прва циљна слика; б) и в) На почетку кретања робот не види прву циљну слику те започиње кретање сходно УОП петљи. Део слике означен испрекиданим правоугаоником показује где се налази прва циљна слика. 61/77
62 Епиполарна геометрија 62/77
63 63/77
; - д)-з) кретање од прве машине алатке до другог циљног положаја (УОП петља); - з)-к) кретање од другог циљног положаја до друге машине алатке и постављање радног предмета на жељену позицију")
64 Експериментални резултати: - а)-б) кретање од почетног положаја до првог циљног положаја (УОП петља); - б)-д) кретање од првог циљног положаја до прве машине алатке и преузимање радног предмета (УОИК петља); - д)-з) кретање од прве машине алатке до другог циљног положаја (УОП петља); - з)-к) кретање од другог циљног положаја до друге машине алатке и постављање радног предмета на жељену позицију (УОИК петља). 64/77
65 Експериментални резултати: Почетна слика Циљна слика након првог сегмента УОИК петље. Завршна слика 65/77
66 Експериментални резултати: Почетна слика Циљна слика након другог сегмента УОИК петље. Завршна слика 66/77

67 Експериментални резултати: -НЛКФ оцене положаја мобилног робота; 67/77
68 68/77
69 Дискусија - Камера је примењена за навођење према жељеном положају који је дефинисан циљном сликом ради преузимања радног предмета - Камера обезбеђује информацију неопходну оцењивање положаја АВР на основу неуронског линеаризованог Калмановог филтра; - Експериментални резултати потврђују да развијени нови хибридни управљачки алгоритам омогућава обављање транспортног задатка, који се састоји од навигације између међускладишта/машина алатки и преузимања/постављања радног предмета; - За примену развијеног хибридног управљачког алгоритма нису потребни вештачки постављени карактеристични објекти у технолошком окружењу ради навигације АВР; - Структура НЛКФ алгоритма обезбеђује примену других Гаусовских филтара (АСАМ или ЛИФ); - За остваривање фреквенције од 30 [Hz] неопходан додатни хардвер. 69/77
70 Садржај 1. Увод интелигентни технолошки систем, унутрашњи транспорт у технолошком окружењу,еволуција роботике, аутоматски вођена робоколица; 2. Мобилни роботи 3. Машинско учење - вештачке неуронске мреже са радијалним активационим функцијама Гаусовог типа, алгоритми оптимизације параметара (линеаризовани Калманов филтар, линеаризовани информациони филтар, алгоритам специфичне апроксимације момената Гаусове расподеле); 4. Интелигентни (индустријски) мобилни роботи у интелигентним технолошким системима - симултано оцењивање (естимација) положаја мобилног робота и карактеристичних објеката у окружењу, аквизиција информација од камере, хибридна управљачка архитектура, хибридно управљање мобилним роботом; 5. Закључак и правац будућих истраживања 70/77

71 Закључак - Модерно схватање унутрашњег транспорта на бази примене АВР => ИМР; - Резултати и концепти, остварени у области развоја мобилних робота, могу се применити и за потребе унутрашњег транспорта применом АВР у технолошком окружењу. Даљи развој унутрашњег транспорта у технолошком окружењу: -способност самосталне навигације, -самостално доношење одлука о будућим акцијама, -самостално спровођење генерисаних планова и - стална двосмерна комуникација са машинама алаткама у погону и осталим мобилним роботима. 71/77
72 - Развијена три нова алгоритма модификације параметара у виду надгледаног машинског учења вештачких неуронских мрежа са радијалним активационим функцијама Гаусовог типа; - Сва три алгоритма су базирана на Калмановом филтру: ЛКФ, ЛИФ и АСАМ; - Развијени алгоритми су секвенцијалног типа; - За сва три алгоритма развијен је одговарајући математички модел; - Алгоритми су тестирани у MATLAB програмском окружењу сопственим развојем одговарајућег софтверског кода и применом тест скупова података; - Резултати указују на то да у директном поређењу са другим развијеним алгоритмима машинског учења остварују вишу тачност. λ λ ε 1 1 y g λ x ω, 1 72/77
73 - Развијен је посебан симулациони модел у MATLAB програмском окружењу да би се оценио утицај основних параметара на оцену положаја мобилног робота; - Неуронски линеаризовани Калманов филтар је тестиран током експерименталног поступка коришћењем Khepera II мобилног робота и WEB камере у лабораторијском моделу технолошког окружења; - Неуронски линеаризовани Калманов филтар примењен је у MATLAB програмском окружењу сопственим развојем посебног кода; - Експериментални резултати недвосмислено указују да се вештачке неуронске мреже могу применити за моделирање грешке кретања у on line режиму. 73/77

74 - У истраживањима је разматран и развој хибридне управљачке архитектуре за навигацију мобилних робота у технолошком окружењу; - Интелигентни унутрашњи транспорт подразумева обједињавање свих особина интелигентног агента; - Архитектура је хибридног карактера и обухвата способност планирања будућих акција и брзог реаговања на стимуланс; - Архитектура је тестирана коришћењем LEGO Mindstorms NXT мобилног робота у лабораторијском моделу технолошког окружења; - Остварени експериментални резултати указују да полазни концепт управљачке архитектуре може да буде примењен у on line режиму. 74/77
75 - Развијен је посебни хибридни управљачки алгоритам за мобилне роботе уз примену система препознавања базираног на калибрисаној камери; - Полазни проблем раздвојен на два једноставнија проблема глобално управљање (од стартног положаја до циљног положаја) и локално управљање (од циљног положаја до крајњег положаја који је једнозначно одређен циљном сликом); - Успешно је решен проблем видног поља; - Овакав приступ раздваја почетни транспортни задатак на два дела: кретање од почетног положаја до циљног положаја (глобално) и кретање од циљног положаја до машине алатке/ међускладишта (локално). На овај начин је елиминисана потреба за потпуном информацијом о распореду објеката у технолошком окружењу. 75/77

 учење мобилног робота и увести могућност емпиријског учења у виду учења ојачавањем. 76/77")
76 Правац будућих истраживања - Развој система интелигентног унутрашњег транспорта није комплетан без анализирања и увођења информација о технолошком процесу у процес одлучивања мобилног робота; - У оквиру спроведеног истраживања скуп технолошких задатака је посматран само као информација о жељеном положају мобилног робота; Пут за југ - НЛКФ је општи алгоритам естимације; - Примена развијених модела ВНМ за решавање... - Омогућити непрестано (машинско) учење мобилног робота и увести могућност емпиријског учења у виду учења ојачавањем. 76/77


77 Хвала вам на пажњи!... и стрпљењу 77/77
Когнитивне способности мобилних робота у домену унутрашњег транспорта материјала
 ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-5 Когнитивна роботика: Аутономни мобилни роботи когнитивне способности мобилних робота Когнитивне способности мобилних робота у домену унутрашњег транспорта материјала
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-5 Когнитивна роботика: Аутономни мобилни роботи когнитивне способности мобилних робота Когнитивне способности мобилних робота у домену унутрашњег транспорта материјала
Предмет: Задатак 4: Слика 1.0
 Лист/листова: 1/1 Задатак 4: Задатак 4.1.1. Слика 1.0 x 1 = x 0 + x x = v x t v x = v cos θ y 1 = y 0 + y y = v y t v y = v sin θ θ 1 = θ 0 + θ θ = ω t θ 1 = θ 0 + ω t x 1 = x 0 + v cos θ t y 1 = y 0 +
Лист/листова: 1/1 Задатак 4: Задатак 4.1.1. Слика 1.0 x 1 = x 0 + x x = v x t v x = v cos θ y 1 = y 0 + y y = v y t v y = v sin θ θ 1 = θ 0 + θ θ = ω t θ 1 = θ 0 + ω t x 1 = x 0 + v cos θ t y 1 = y 0 +
1. Модел кретања (1.1)
") 1. Модел кретања Кинематика, у најопштијој формулацији, може да буде дефинисана као геометрија кретања. Другим речима, применом основног апарата математичке анализе успостављају се зависности између елементарних
1. Модел кретања Кинематика, у најопштијој формулацији, може да буде дефинисана као геометрија кретања. Другим речима, применом основног апарата математичке анализе успостављају се зависности између елементарних
налазе се у диелектрику, релативне диелектричне константе ε r = 2, на међусобном растојању 2 a ( a =1cm
 1 Два тачкаста наелектрисања 1 400 p и 100p налазе се у диелектрику релативне диелектричне константе ε на међусобном растојању ( 1cm ) као на слици 1 Одредити силу на наелектрисање 3 100p када се оно нађе:
1 Два тачкаста наелектрисања 1 400 p и 100p налазе се у диелектрику релативне диелектричне константе ε на међусобном растојању ( 1cm ) као на слици 1 Одредити силу на наелектрисање 3 100p када се оно нађе:
Теорија електричних кола
 др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола i i i Милка Потребић др Милка Потребић, ванредни професор,
др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола i i i Милка Потребић др Милка Потребић, ванредни професор,
Анализа Петријевих мрежа
 Анализа Петријевих мрежа Анализа Петријевих мрежа Мере се: Својства Петријевих мрежа: Досежљивост (Reachability) Проблем досежљивости се састоји у испитивању да ли се може достићи неко, жељено или нежељено,
Анализа Петријевих мрежа Анализа Петријевих мрежа Мере се: Својства Петријевих мрежа: Досежљивост (Reachability) Проблем досежљивости се састоји у испитивању да ли се може достићи неко, жељено или нежељено,
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-1 Хибридни интелигентни технолошки системи
 ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-1 Хибридни интелигентни технолошки системи ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ Дефиниција Интелигентни технолошки систем* ) (ИТС) је највиша класа флексибилних технолошких
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-1 Хибридни интелигентни технолошки системи ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ Дефиниција Интелигентни технолошки систем* ) (ИТС) је највиша класа флексибилних технолошких
Tестирање хипотеза. 5.час. 30. март Боjана Тодић Статистички софтвер март / 10
 Tестирање хипотеза 5.час 30. март 2016. Боjана Тодић Статистички софтвер 2 30. март 2016. 1 / 10 Монте Карло тест Монте Карло методе су методе код коjих се употребљаваjу низови случаjних броjева за извршење
Tестирање хипотеза 5.час 30. март 2016. Боjана Тодић Статистички софтвер 2 30. март 2016. 1 / 10 Монте Карло тест Монте Карло методе су методе код коjих се употребљаваjу низови случаjних броjева за извршење
Универзитет у Београду Машински факултет
 Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
Емпиријскo управљање интелигентног мобилног робота на бази машинског учења демонстрацијом и хомографије добијене од некалибрисане камере
 ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Емпиријскo управљање интелигентног мобилног робота на бази машинског учења демонстрацијом и хомографије добијене од некалибрисане камере Марко Митић 1, Зоран Миљковић
ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Емпиријскo управљање интелигентног мобилног робота на бази машинског учења демонстрацијом и хомографије добијене од некалибрисане камере Марко Митић 1, Зоран Миљковић
предмет МЕХАНИКА 1 Студијски програми ИНДУСТРИЈСКО ИНЖЕЊЕРСТВО ДРУМСКИ САОБРАЋАЈ II ПРЕДАВАЊЕ УСЛОВИ РАВНОТЕЖЕ СИСТЕМА СУЧЕЉНИХ СИЛА
 Висока техничка школа струковних студија у Нишу предмет МЕХАНИКА 1 Студијски програми ИНДУСТРИЈСКО ИНЖЕЊЕРСТВО ДРУМСКИ САОБРАЋАЈ II ПРЕДАВАЊЕ УСЛОВИ РАВНОТЕЖЕ СИСТЕМА СУЧЕЉНИХ СИЛА Садржај предавања: Систем
Висока техничка школа струковних студија у Нишу предмет МЕХАНИКА 1 Студијски програми ИНДУСТРИЈСКО ИНЖЕЊЕРСТВО ДРУМСКИ САОБРАЋАЈ II ПРЕДАВАЊЕ УСЛОВИ РАВНОТЕЖЕ СИСТЕМА СУЧЕЉНИХ СИЛА Садржај предавања: Систем
Терминирање флексибилних технолошких процеса
 ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-8 Терминирање производно-технолошких ентитета Терминирање флексибилних технолошких процеса Терминирање (енгл. scheduling) представља процес планирања машинске обраде,
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-8 Терминирање производно-технолошких ентитета Терминирање флексибилних технолошких процеса Терминирање (енгл. scheduling) представља процес планирања машинске обраде,
Теорија електричних кола
 Др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола Милка Потребић Др Милка Потребић, ванредни професор,
Др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола Милка Потребић Др Милка Потребић, ванредни професор,
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА МАТЕМАТИКА ТЕСТ
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА МАТЕМАТИКА ТЕСТ УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА МАТЕМАТИКА ТЕСТ УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
Основе теорије вероватноће
 . Прилог А Основе теорије вероватноће Основни појмови теорије вероватноће су експеримент и исходи резултати. Најпознатији пример којим се уводе појмови и концепти теорије вероватноће је бацање новчића
. Прилог А Основе теорије вероватноће Основни појмови теорије вероватноће су експеримент и исходи резултати. Најпознатији пример којим се уводе појмови и концепти теорије вероватноће је бацање новчића
Праћење жељене трајекторије и визуелно навођење мобилног робота у технолошком окружењу на бази биолошки инспирисаног метахеуристичког алгоритма
 ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Праћење жељене трајекторије и визуелно навођење мобилног робота у технолошком окружењу на бази биолошки инспирисаног метахеуристичког алгоритма Марко Митић 1, Зоран
ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Праћење жељене трајекторије и визуелно навођење мобилног робота у технолошком окружењу на бази биолошки инспирисаног метахеуристичког алгоритма Марко Митић 1, Зоран
1.2. Сличност троуглова
 математик за VIII разред основне школе.2. Сличност троуглова Учили смо и дефиницију подударности два троугла, као и четири правила (теореме) о подударности троуглова. На сличан начин наводимо (без доказа)
математик за VIII разред основне школе.2. Сличност троуглова Учили смо и дефиницију подударности два троугла, као и четири правила (теореме) о подударности троуглова. На сличан начин наводимо (без доказа)
θ = rt Sl r КОМПЈУТЕРСКА СИМУЛАЦИЈА И ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА Лист/листова: 1/45 ЗАДАТАК 4 Задатак 4.1.1
 И ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА Лист/листова: 1/45 ЗАДАТАК 4 Задатак 4.1.1 Математички доказ изведен је на основу постављања робота у произвољан положај и одабира произвољне референтне тачке кретања из које се
И ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА Лист/листова: 1/45 ЗАДАТАК 4 Задатак 4.1.1 Математички доказ изведен је на основу постављања робота у произвољан положај и одабира произвољне референтне тачке кретања из које се
Универзитет у Београду Машински факултет
 Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
АТ-5 Вештачке неуронске мреже Проф. др Зоран Миљковић Методе одлучивања 1/35
 АТ-5 Вештачке неуронске мреже Проф. др Зоран Миљковић Методе одлучивања 1/35 Вештачке неуронске мреже Деф: Неуронска мрежа је парадигма вештачке интелигенције која се дефинише као конективни модел за резоновање
АТ-5 Вештачке неуронске мреже Проф. др Зоран Миљковић Методе одлучивања 1/35 Вештачке неуронске мреже Деф: Неуронска мрежа је парадигма вештачке интелигенције која се дефинише као конективни модел за резоновање
1. Математички доказ закона кретања мобилног робота
 Лист/листова: 1/1 1. Математички доказ закона кретања мобилног робота У нашем случају усвојен је модел кретања робота на основу пређеног пута (одометрија). У овом моделу управљање u(t) је дефинисано пређеним
Лист/листова: 1/1 1. Математички доказ закона кретања мобилног робота У нашем случају усвојен је модел кретања робота на основу пређеног пута (одометрија). У овом моделу управљање u(t) је дефинисано пређеним
Универзитет у Београду. Машински факултет. Пројектни задатак. Мастер академске студије 1. година, II семестар. Шк.год. 2010/2011.
 Универзитет у Београду Машински факултет Мастер академске студије 1. година, II семестар Шк.год. 2010/2011. Модул: Дизајн у машинству Пројектни задатак Предмет: Методе одлучивања Предметни наставник: Предметни
Универзитет у Београду Машински факултет Мастер академске студије 1. година, II семестар Шк.год. 2010/2011. Модул: Дизајн у машинству Пројектни задатак Предмет: Методе одлучивања Предметни наставник: Предметни
ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА У ПРОЈЕКТОВАЊУ ИНТЕЛИГЕНТНИХ ТЕХНОЛОШКИХ СИСТЕМА
 УНИВЕРЗИТЕТ У БЕОГРАДУ MAШИНСКИ ФАКУЛТЕТ Милица М. Петровић ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА У ПРОЈЕКТОВАЊУ ИНТЕЛИГЕНТНИХ ТЕХНОЛОШКИХ СИСТЕМА докторска дисертација Београд, 2016. године UNIVERSITY OF BELGRADE FACULTY
УНИВЕРЗИТЕТ У БЕОГРАДУ MAШИНСКИ ФАКУЛТЕТ Милица М. Петровић ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА У ПРОЈЕКТОВАЊУ ИНТЕЛИГЕНТНИХ ТЕХНОЛОШКИХ СИСТЕМА докторска дисертација Београд, 2016. године UNIVERSITY OF BELGRADE FACULTY
2. Наставни колоквијум Задаци за вежбање ОЈЛЕРОВА МЕТОДА
 . колоквијум. Наставни колоквијум Задаци за вежбање У свим задацима се приликом рачунања добија само по једна вредност. Одступање појединачне вредности од тачне вредности је апсолутна грешка. Вредност
. колоквијум. Наставни колоквијум Задаци за вежбање У свим задацима се приликом рачунања добија само по једна вредност. Одступање појединачне вредности од тачне вредности је апсолутна грешка. Вредност
2.3. Решавање линеарних једначина с једном непознатом
 . Решимо једначину 5. ( * ) + 5 + Провера: + 5 + 0 5 + 5 +. + 0. Број је решење дате једначине... Реши једначину: ) +,5 ) + ) - ) - -.. Да ли су следеће једначине еквивалентне? Провери решавањем. ) - 0
. Решимо једначину 5. ( * ) + 5 + Провера: + 5 + 0 5 + 5 +. + 0. Број је решење дате једначине... Реши једначину: ) +,5 ) + ) - ) - -.. Да ли су следеће једначине еквивалентне? Провери решавањем. ) - 0
Факултет организационих наука Центар за пословно одлучивање. PROMETHEE (Preference Ranking Organization Method for Enrichment Evaluation)
") Факултет организационих наука Центар за пословно одлучивање PROMETHEE (Preference Ranking Organization Method for Enrichment Evaluation) Студија случаја D-Sight Консултантске услуге за Изградња брзе пруге
Факултет организационих наука Центар за пословно одлучивање PROMETHEE (Preference Ranking Organization Method for Enrichment Evaluation) Студија случаја D-Sight Консултантске услуге за Изградња брзе пруге
Универзитет у Београду, Саобраћајни факултет Предмет: Паркирање. 1. вежба
 Универзитет у Београду, Саобраћајни факултет Предмет: Паркирање ОРГАНИЗАЦИЈА ПАРКИРАЛИШТА 1. вежба Место за паркирање (паркинг место) Део простора намењен, технички опремљен и уређен за паркирање једног
Универзитет у Београду, Саобраћајни факултет Предмет: Паркирање ОРГАНИЗАЦИЈА ПАРКИРАЛИШТА 1. вежба Место за паркирање (паркинг место) Део простора намењен, технички опремљен и уређен за паркирање једног
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 013/014. година ТЕСТ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 013/014. година ТЕСТ
Први корак у дефинисању случајне променљиве је. дефинисање и исписивање свих могућих eлементарних догађаја.
 СЛУЧАЈНА ПРОМЕНЉИВА Једнодимензионална случајна променљива X је пресликавање у коме се сваки елементарни догађај из простора елементарних догађаја S пресликава у вредност са бројне праве Први корак у дефинисању
СЛУЧАЈНА ПРОМЕНЉИВА Једнодимензионална случајна променљива X је пресликавање у коме се сваки елементарни догађај из простора елементарних догађаја S пресликава у вредност са бројне праве Први корак у дефинисању
СИСТЕМ ЛИНЕАРНИХ ЈЕДНАЧИНА С ДВЕ НЕПОЗНАТЕ
 СИСТЕМ ЛИНЕАРНИХ ЈЕДНАЧИНА С ДВЕ НЕПОЗНАТЕ 8.. Линеарна једначина с две непознате Упознали смо појам линеарног израза са једном непознатом. Изрази x + 4; (x 4) + 5; x; су линеарни изрази. Слично, линеарни
СИСТЕМ ЛИНЕАРНИХ ЈЕДНАЧИНА С ДВЕ НЕПОЗНАТЕ 8.. Линеарна једначина с две непознате Упознали смо појам линеарног израза са једном непознатом. Изрази x + 4; (x 4) + 5; x; су линеарни изрази. Слично, линеарни
Школска 2010/2011 ДОКТОРСКЕ АКАДЕМСКЕ СТУДИЈЕ
 Школска 2010/2011 ДОКТОРСКЕ АКАДЕМСКЕ СТУДИЈЕ Прва година ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА Г1: ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА 10 ЕСПБ бодова. Недељно има 20 часова
Школска 2010/2011 ДОКТОРСКЕ АКАДЕМСКЕ СТУДИЈЕ Прва година ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА Г1: ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА 10 ЕСПБ бодова. Недељно има 20 часова
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 01/01. година ТЕСТ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 01/01. година ТЕСТ
Положај сваке тачке кружне плоче је одређен са поларним координатама r и ϕ.
 VI Савијање кружних плоча Положај сваке тачке кружне плоче је одређен са поларним координатама и ϕ слика 61 Диференцијална једначина савијања кружне плоче је: ( ϕ) 1 1 w 1 w 1 w Z, + + + + ϕ ϕ K Пресечне
VI Савијање кружних плоча Положај сваке тачке кружне плоче је одређен са поларним координатама и ϕ слика 61 Диференцијална једначина савијања кружне плоче је: ( ϕ) 1 1 w 1 w 1 w Z, + + + + ϕ ϕ K Пресечне
Задатак Задатак Задатак Задатак Задатак Списак слика Литература... 86
 Лист/листова: 1/86 Садржај Задатак 1.1.1... 3 Задатак 1.1.2... 5 Задатак 1.2.1... 6 Задатак 2.1... 70 Задатак 2.2... 75 Списак слика... 83 Литература... 86 4 468/09 495/09 28/08 18/09 69/09 20/11. 1.6.21
Лист/листова: 1/86 Садржај Задатак 1.1.1... 3 Задатак 1.1.2... 5 Задатак 1.2.1... 6 Задатак 2.1... 70 Задатак 2.2... 75 Списак слика... 83 Литература... 86 4 468/09 495/09 28/08 18/09 69/09 20/11. 1.6.21
г) страница aa и пречник 2RR описаног круга правилног шестоугла јесте рац. бр. јесу самерљиве
 страница aa и пречник 2RR описаног круга правилног шестоугла јесте рац. бр. јесу самерљиве") в) дијагонала dd и страница aa квадрата dd = aa aa dd = aa aa = није рац. бр. нису самерљиве г) страница aa и пречник RR описаног круга правилног шестоугла RR = aa aa RR = aa aa = 1 јесте рац. бр. јесу
в) дијагонала dd и страница aa квадрата dd = aa aa dd = aa aa = није рац. бр. нису самерљиве г) страница aa и пречник RR описаног круга правилног шестоугла RR = aa aa RR = aa aa = 1 јесте рац. бр. јесу
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Тест Математика Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 00/0. година ТЕСТ МАТЕМАТИКА
Тест Математика Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 00/0. година ТЕСТ МАТЕМАТИКА
Универзитет у Београду Машински факултет
 Универзитет у Београду Машински факултет ДИЗАЈН У МАШИНСТВУ Методе одлучивања Пројектни задатак Оверио (потпис/датум): Чланови групе: Наставник: Сарадници: Ведран Радиновић Лукић 1085/10 Давор Дробац 122/07
Универзитет у Београду Машински факултет ДИЗАЈН У МАШИНСТВУ Методе одлучивања Пројектни задатак Оверио (потпис/датум): Чланови групе: Наставник: Сарадници: Ведран Радиновић Лукић 1085/10 Давор Дробац 122/07
МАТРИЧНА АНАЛИЗА КОНСТРУКЦИЈА
 Београд, 21.06.2014. За штап приказан на слици одредити најмању вредност критичног оптерећења P cr користећи приближан поступак линеаризоване теорије другог реда и: а) и један елемент, слика 1, б) два
Београд, 21.06.2014. За штап приказан на слици одредити најмању вредност критичног оптерећења P cr користећи приближан поступак линеаризоване теорије другог реда и: а) и један елемент, слика 1, б) два
Осцилације система са једним степеном слободе кретања
 03-ec-18 Осцилације система са једним степеном слободе кретања Опруга Принудна сила F(t) Вискозни пригушивач ( дампер ) 1 Принудна (пертурбациона) сила опруга Реституциона сила (сила еластичног отпора)
03-ec-18 Осцилације система са једним степеном слободе кретања Опруга Принудна сила F(t) Вискозни пригушивач ( дампер ) 1 Принудна (пертурбациона) сила опруга Реституциона сила (сила еластичног отпора)
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 011/01. година ТЕСТ МАТЕМАТИКА УПУТСТВО
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 011/01. година ТЕСТ МАТЕМАТИКА УПУТСТВО
Стручни рад ПРИМЕНА МЕТОДЕ АНАЛИТИЧКИХ ХИЕРАРХИJСКИХ ПРОЦЕСА (АХП) КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ
 КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ") ПОДЗЕМНИ РАДОВИ 15 (2006) 43-48 UDK 62 РУДАРСКО-ГЕОЛОШКИ ФАКУЛТЕТ БЕОГРАД YU ISSN 03542904 Стручни рад ПРИМЕНА МЕТОДЕ АНАЛИТИЧКИХ ХИЕРАРХИJСКИХ ПРОЦЕСА (АХП) КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ ИЗВОД
ПОДЗЕМНИ РАДОВИ 15 (2006) 43-48 UDK 62 РУДАРСКО-ГЕОЛОШКИ ФАКУЛТЕТ БЕОГРАД YU ISSN 03542904 Стручни рад ПРИМЕНА МЕТОДЕ АНАЛИТИЧКИХ ХИЕРАРХИJСКИХ ПРОЦЕСА (АХП) КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ ИЗВОД
Теорија одлучивања. Анализа ризика
 Теорија одлучивања Анализа ризика Циљеви предавања Упознавање са процесом анализе ризика Моделовање ризика Монте-Карло Симулација Предности и недостаци анализе ризика 2 Дефиниција ризика (квалитативни
Теорија одлучивања Анализа ризика Циљеви предавања Упознавање са процесом анализе ризика Моделовање ризика Монте-Карло Симулација Предности и недостаци анализе ризика 2 Дефиниција ризика (квалитативни
САДРЖАЈ ЗАДАТАК 1...
 Лист/листова: 1/1 САДРЖАЈ ЗАДАТАК 1... 1.1.1. Математички доказ закона кретања мобилног робота 1.1.2. Кретање робота по трајекторији... Транслаторно кретање... Кретање по трајекторији ромбоидног облика...
Лист/листова: 1/1 САДРЖАЈ ЗАДАТАК 1... 1.1.1. Математички доказ закона кретања мобилног робота 1.1.2. Кретање робота по трајекторији... Транслаторно кретање... Кретање по трајекторији ромбоидног облика...
Висока техничка школа струковних студија Београд Математика 2 Интервали поверења и линеарна регресија предавач: др Мићо Милетић
 Математика Интервали поверења и линеарна регресија предавач: др Мићо Милетић Интервали поверења Тачкасте оцене параметара основног скупа могу се сматрати као приликом обраде узорка. Њихов недостатак је
Математика Интервали поверења и линеарна регресија предавач: др Мићо Милетић Интервали поверења Тачкасте оцене параметара основног скупа могу се сматрати као приликом обраде узорка. Њихов недостатак је
8.2 ЛАБОРАТОРИЈСКА ВЕЖБА 2 Задатак вежбе: Израчунавање фактора појачања мотора напонским управљањем у отвореној повратној спрези
 Регулциј електромоторних погон 8 ЛАБОРАТОРИЈСКА ВЕЖБА Здтк вежбе: Изрчунвње фктор појчњ мотор нпонским упрвљњем у отвореној повртној спрези Увод Преносн функциј мотор којим се нпонски упрвљ Кд се з нулте
Регулциј електромоторних погон 8 ЛАБОРАТОРИЈСКА ВЕЖБА Здтк вежбе: Изрчунвње фктор појчњ мотор нпонским упрвљњем у отвореној повртној спрези Увод Преносн функциј мотор којим се нпонски упрвљ Кд се з нулте
L кплп (Калем у кплу прпстпперипдичне струје)
") L кплп (Калем у кплу прпстпперипдичне струје) i L u=? За коло са слике кроз калем ппзнате позната простопериодична струја: индуктивности L претпоставићемо да протиче i=i m sin(ωt + ψ). Услед променљиве
L кплп (Калем у кплу прпстпперипдичне струје) i L u=? За коло са слике кроз калем ппзнате позната простопериодична струја: индуктивности L претпоставићемо да протиче i=i m sin(ωt + ψ). Услед променљиве
ЗАВРШНИ РАД КЛИНИЧКА МЕДИЦИНА 5. школска 2016/2017. ШЕСТА ГОДИНА СТУДИЈА
 ЗАВРШНИ РАД КЛИНИЧКА МЕДИЦИНА 5 ШЕСТА ГОДИНА СТУДИЈА школска 2016/2017. Предмет: ЗАВРШНИ РАД Предмет се вреднује са 6 ЕСПБ. НАСТАВНИЦИ И САРАДНИЦИ: РБ Име и презиме Email адреса звање 1. Јасмина Кнежевић
ЗАВРШНИ РАД КЛИНИЧКА МЕДИЦИНА 5 ШЕСТА ГОДИНА СТУДИЈА школска 2016/2017. Предмет: ЗАВРШНИ РАД Предмет се вреднује са 6 ЕСПБ. НАСТАВНИЦИ И САРАДНИЦИ: РБ Име и презиме Email адреса звање 1. Јасмина Кнежевић
Репродукција комплексних трајекторија мобилног робота на бази биолошки инспирисаних алгоритама
 ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Репродукција комплексних трајекторија мобилног робота на бази биолошки инспирисаних алгоритама Марко Митић 1, Најдан Вуковић 2, Милица Петровић 3, Јелена Петронијевић
ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Репродукција комплексних трајекторија мобилног робота на бази биолошки инспирисаних алгоритама Марко Митић 1, Најдан Вуковић 2, Милица Петровић 3, Јелена Петронијевић
b) Израз за угиб дате плоче, ако се користи само први члан реда усвојеног решења, је:
 Израз за угиб дате плоче, ако се користи само први члан реда усвојеног решења, је:") Пример 1. III Савијање правоугаоних плоча За правоугаону плочу, приказану на слици, одредити: a) израз за угиб, b) вредност угиба и пресечних сила у тачки 1 ако се користи само први члан реда усвојеног
Пример 1. III Савијање правоугаоних плоча За правоугаону плочу, приказану на слици, одредити: a) израз за угиб, b) вредност угиба и пресечних сила у тачки 1 ако се користи само први члан реда усвојеног
Упутство за избор домаћих задатака
 Упутство за избор домаћих задатака Студент од изабраних задатака области Математике 2: Комбинаторика, Вероватноћа и статистика бира по 20 задатака. Студент може бирати задатке помоћу програмског пакета
Упутство за избор домаћих задатака Студент од изабраних задатака области Математике 2: Комбинаторика, Вероватноћа и статистика бира по 20 задатака. Студент може бирати задатке помоћу програмског пакета
6.5 Површина круга и његових делова
 7. Тетива је једнака полупречнику круга. Израчунај дужину мањег одговарајућег лука ако је полупречник 2,5 сm. 8. Географска ширина Београда је α = 44 47'57", а полупречник Земље 6 370 km. Израчунај удаљеност
7. Тетива је једнака полупречнику круга. Израчунај дужину мањег одговарајућег лука ако је полупречник 2,5 сm. 8. Географска ширина Београда је α = 44 47'57", а полупречник Земље 6 370 km. Израчунај удаљеност
6.2. Симетрала дужи. Примена
 6.2. Симетрала дужи. Примена Дата је дуж АВ (слика 22). Тачка О је средиште дужи АВ, а права је нормална на праву АВ(p) и садржи тачку О. p Слика 22. Права назива се симетрала дужи. Симетрала дужи је права
6.2. Симетрала дужи. Примена Дата је дуж АВ (слика 22). Тачка О је средиште дужи АВ, а права је нормална на праву АВ(p) и садржи тачку О. p Слика 22. Права назива се симетрала дужи. Симетрала дужи је права
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 014/01. година ТЕСТ МАТЕМАТИКА
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 014/01. година ТЕСТ МАТЕМАТИКА
Вектори vs. скалари. Векторске величине се описују интензитетом и правцем. Примери: Померај, брзина, убрзање, сила.
 Вектори 1 Вектори vs. скалари Векторске величине се описују интензитетом и правцем Примери: Померај, брзина, убрзање, сила. Скаларне величине су комплетно описане само интензитетом Примери: Температура,
Вектори 1 Вектори vs. скалари Векторске величине се описују интензитетом и правцем Примери: Померај, брзина, убрзање, сила. Скаларне величине су комплетно описане само интензитетом Примери: Температура,
1. Моделирање и модели, врсте модела. 2. Неформални и формални модели
 . Моделирање и модели, врсте модела Моделирање представља један од основних процеса људскога ума. Оно се најчешће посматра као најзначајније концептуално средство које човеку стоји на располагању. У најширем
. Моделирање и модели, врсте модела Моделирање представља један од основних процеса људскога ума. Оно се најчешће посматра као најзначајније концептуално средство које човеку стоји на располагању. У најширем
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2011/2012. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2011/2012. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
Писмени испит из Метода коначних елемената
 Београд,.0.07.. За приказани билинеарни коначни елемент (Q8) одредити вектор чворног оптерећења услед задатог линијског оптерећења p. Користити природни координатни систем (ξ,η).. На слици је приказан
Београд,.0.07.. За приказани билинеарни коначни елемент (Q8) одредити вектор чворног оптерећења услед задатог линијског оптерећења p. Користити природни координатни систем (ξ,η).. На слици је приказан
ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ
 ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ предмет: ОСНОВИ МЕХАНИКЕ студијски програм: ЗАШТИТА ЖИВОТНЕ СРЕДИНЕ И ПРОСТОРНО ПЛАНИРАЊЕ ПРЕДАВАЊЕ БРОЈ 2. Садржај предавања: Систем сучељних сила у равни
ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ предмет: ОСНОВИ МЕХАНИКЕ студијски програм: ЗАШТИТА ЖИВОТНЕ СРЕДИНЕ И ПРОСТОРНО ПЛАНИРАЊЕ ПРЕДАВАЊЕ БРОЈ 2. Садржај предавања: Систем сучељних сила у равни
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ПРОБНИ ЗАВРШНИ ИСПИТ школска 016/017. година ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ПРЕГЛЕДАЊЕ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ПРОБНИ ЗАВРШНИ ИСПИТ школска 016/017. година ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ПРЕГЛЕДАЊЕ
Могућности и планови ЕПС на пољу напонско реактивне подршке. Излагач: Милан Ђорђевић, мастер.ел.тех.и рачунар. ЈП ЕПС Производња енергије
 Могућности и планови ЕПС на пољу напонско реактивне подршке Излагач: Милан Ђорђевић, мастер.ел.тех.и рачунар. ЈП ЕПС Производња енергије 1 Обавезе ЈП ЕПС као КПС... ЗАКОН О ЕНЕРГЕТИЦИ ЧЛАН 94. Енергетски
Могућности и планови ЕПС на пољу напонско реактивне подршке Излагач: Милан Ђорђевић, мастер.ел.тех.и рачунар. ЈП ЕПС Производња енергије 1 Обавезе ЈП ЕПС као КПС... ЗАКОН О ЕНЕРГЕТИЦИ ЧЛАН 94. Енергетски
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2010/2011. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2010/2011. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
Хомогена диференцијална једначина је она која може да се напише у облику: = t( x)
") ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ Штa треба знати пре почетка решавања задатака? Врсте диференцијалних једначина. ДИФЕРЕНЦИЈАЛНА ЈЕДНАЧИНА КОЈА РАЗДВАЈА ПРОМЕНЉИВЕ Код ове методе поступак је следећи: раздвојити
ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ Штa треба знати пре почетка решавања задатака? Врсте диференцијалних једначина. ДИФЕРЕНЦИЈАЛНА ЈЕДНАЧИНА КОЈА РАЗДВАЈА ПРОМЕНЉИВЕ Код ове методе поступак је следећи: раздвојити
TAЧКАСТА НАЕЛЕКТРИСАЊА
 TЧКАСТА НАЕЛЕКТРИСАЊА Два тачкаста наелектрисања оптерећена количинама електрицитета и налазе се у вакууму као што је приказано на слици Одредити: а) Вектор јачине електростатичког поља у тачки А; б) Електрични
TЧКАСТА НАЕЛЕКТРИСАЊА Два тачкаста наелектрисања оптерећена количинама електрицитета и налазе се у вакууму као што је приказано на слици Одредити: а) Вектор јачине електростатичког поља у тачки А; б) Електрични
Семинарски рад из линеарне алгебре
 Универзитет у Београду Машински факултет Докторске студије Милош Живановић дипл. инж. Семинарски рад из линеарне алгебре Београд, 6 Линеарна алгебра семинарски рад Дата је матрица: Задатак: a) Одредити
Универзитет у Београду Машински факултет Докторске студије Милош Живановић дипл. инж. Семинарски рад из линеарне алгебре Београд, 6 Линеарна алгебра семинарски рад Дата је матрица: Задатак: a) Одредити
ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ПРЕГЛЕДАЊЕ
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА ПРИЈЕМНИ ИСПИТ ЗА УЧЕНИКЕ СА ПОСЕБНИМ СПОСОБНОСТИМА ЗА ИНФОРМАТИКУ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА ПРИЈЕМНИ ИСПИТ ЗА УЧЕНИКЕ СА ПОСЕБНИМ СПОСОБНОСТИМА ЗА ИНФОРМАТИКУ
4.4. Паралелне праве, сечица. Углови које оне одређују. Углови са паралелним крацима
 50. Нацртај било које унакрсне углове. Преношењем утврди однос унакрсних углова. Какво тврђење из тога следи? 51. Нацртај угао чија је мера 60, а затим нацртај њему унакрсни угао. Колика је мера тог угла?
50. Нацртај било које унакрсне углове. Преношењем утврди однос унакрсних углова. Какво тврђење из тога следи? 51. Нацртај угао чија је мера 60, а затим нацртај њему унакрсни угао. Колика је мера тог угла?
ОБЛАСТИ: 1) Тачка 2) Права 3) Криве другог реда
 Тачка 2) Права 3) Криве другог реда") ОБЛАСТИ: ) Тачка ) Права Jov@soft - Март 0. ) Тачка Тачка је дефинисана (одређена) у Декартовом координатном систему са своје две коодринате. Примери: М(5, ) или М(-, 7) или М(,; -5) Jov@soft - Март 0.
ОБЛАСТИ: ) Тачка ) Права Jov@soft - Март 0. ) Тачка Тачка је дефинисана (одређена) у Декартовом координатном систему са своје две коодринате. Примери: М(5, ) или М(-, 7) или М(,; -5) Jov@soft - Март 0.
5.2. Имплицитни облик линеарне функције
 математикa за VIII разред основне школе 0 Слика 6 8. Нацртај график функције: ) =- ; ) =,5; 3) = 0. 9. Нацртај график функције и испитај њен знак: ) = - ; ) = 0,5 + ; 3) =-- ; ) = + 0,75; 5) = 0,5 +. 0.
математикa за VIII разред основне школе 0 Слика 6 8. Нацртај график функције: ) =- ; ) =,5; 3) = 0. 9. Нацртај график функције и испитај њен знак: ) = - ; ) = 0,5 + ; 3) =-- ; ) = + 0,75; 5) = 0,5 +. 0.
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
6.1. Осна симетрија у равни. Симетричност двеју фигура у односу на праву. Осна симетрија фигуре
 0 6.. Осна симетрија у равни. Симетричност двеју фигура у односу на праву. Осна симетрија фигуре У обичном говору се често каже да су неки предмети симетрични. Примери таквих објеката, предмета, геометријских
0 6.. Осна симетрија у равни. Симетричност двеју фигура у односу на праву. Осна симетрија фигуре У обичном говору се често каже да су неки предмети симетрични. Примери таквих објеката, предмета, геометријских
Cook-Levin: SAT је NP-комплетан. Теодор Најдан Трифунов 305M/12
 Cook-Levin: SAT је NP-комплетан Теодор Најдан Трифунов 305M/12 1 Основни појмови Недетерминистичка Тјурингова машина (НТМ) је уређена седморка M = (Q, Σ, Γ, δ, q 0,, ) Q коначан скуп стања контролног механизма
Cook-Levin: SAT је NP-комплетан Теодор Најдан Трифунов 305M/12 1 Основни појмови Недетерминистичка Тјурингова машина (НТМ) је уређена седморка M = (Q, Σ, Γ, δ, q 0,, ) Q коначан скуп стања контролног механизма
Теорија електричних кола
 Др Милка Потребић, ванредни професор, Теорија електричних кола, предавања, Универзитет у Београду Електротехнички факултет, 07. Вишефазне електричне системе је патентирао српски истраживач Никола Тесла
Др Милка Потребић, ванредни професор, Теорија електричних кола, предавања, Универзитет у Београду Електротехнички факултет, 07. Вишефазне електричне системе је патентирао српски истраживач Никола Тесла
8.5 ЛАБОРАТОРИЈСКА ВЕЖБА 5 Задатак вежбе: PI регулација брзине напонски управљаним микромотором једносмерне струје
 Регулација електромоторних погона 8.5 ЛАБОРАТОРИЈСКА ВЕЖБА 5 Задатак вежбе: регулација брзине напонски управљаним микромотором једносмерне струје Увод Simulik модел На основу упрошћеног блок дијаграма
Регулација електромоторних погона 8.5 ЛАБОРАТОРИЈСКА ВЕЖБА 5 Задатак вежбе: регулација брзине напонски управљаним микромотором једносмерне струје Увод Simulik модел На основу упрошћеног блок дијаграма
СИМУЛАЦИЈА ПРОЦЕСА ОБРАДЕ ПЛАСТИЧНИМ ДЕФОРМИСАЊЕМ (МЕТОД КОНАЧНИХ ЕЛЕМЕНАТА)
") ТЕХНОЛОГИЈА МАШИНОГРАДЊЕ ЛЕТЊИ СЕМЕСТАР 3. лабораторијска вежба СИМУЛАЦИЈА ПРОЦЕСА ОБРАДЕ ПЛАСТИЧНИМ ДЕФОРМИСАЊЕМ (МЕТОД КОНАЧНИХ ЕЛЕМЕНАТА) Дефиниција Метод коначних елемената (МКЕ) се заснива на одређеној
ТЕХНОЛОГИЈА МАШИНОГРАДЊЕ ЛЕТЊИ СЕМЕСТАР 3. лабораторијска вежба СИМУЛАЦИЈА ПРОЦЕСА ОБРАДЕ ПЛАСТИЧНИМ ДЕФОРМИСАЊЕМ (МЕТОД КОНАЧНИХ ЕЛЕМЕНАТА) Дефиниција Метод коначних елемената (МКЕ) се заснива на одређеној
Факултет организационих наука Центар за пословно одлучивање. Откривање законитости у подацима Вештачке неуронске мреже
 Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 016/017. година ТЕСТ МАТЕМАТИКА
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 016/017. година ТЕСТ МАТЕМАТИКА
РАЗВОЈ И ПРИМЕНА МЕТОДА ХЕУРИСТИЧКЕ ОПТИМИЗАЦИЈЕ МАШИНСКИХ КОНСТРУКЦИЈА
 УНИВЕРЗИТЕТ У КРАГУЈЕВЦУ ФАКУЛТЕТ ИНЖЕЊЕРСКИХ НАУКА Ненад Костић РАЗВОЈ И ПРИМЕНА МЕТОДА ХЕУРИСТИЧКЕ ОПТИМИЗАЦИЈЕ МАШИНСКИХ КОНСТРУКЦИЈА Докторска дисертација Крагујевац, 2017. Идентификациона страна:
УНИВЕРЗИТЕТ У КРАГУЈЕВЦУ ФАКУЛТЕТ ИНЖЕЊЕРСКИХ НАУКА Ненад Костић РАЗВОЈ И ПРИМЕНА МЕТОДА ХЕУРИСТИЧКЕ ОПТИМИЗАЦИЈЕ МАШИНСКИХ КОНСТРУКЦИЈА Докторска дисертација Крагујевац, 2017. Идентификациона страна:
ИЗВОД ИЗ ИЗВЕШТАЈА О ЦЕНАМА КОМУНАЛНИХ УСЛУГА - УДРУЖЕЊЕ ЗА КОМУНАЛНЕ ДЕЛАТНОСТИ -
 ИЗВОД ИЗ ИЗВЕШТАЈА О ЦЕНАМА КОМУНАЛНИХ УСЛУГА - УДРУЖЕЊЕ ЗА КОМУНАЛНЕ ДЕЛАТНОСТИ - ЦЕНЕ ПРОИЗВОДЊЕ И ДИСТРИБУЦИЈЕ ВОДЕ И ЦЕНЕ САКУПЉАЊА, ОДВОђЕЊА И ПРЕЧИШЋАВАЊА ОТПАДНИХ ВОДА НА НИВОУ ГРУПАЦИЈЕ ВОДОВОДА
ИЗВОД ИЗ ИЗВЕШТАЈА О ЦЕНАМА КОМУНАЛНИХ УСЛУГА - УДРУЖЕЊЕ ЗА КОМУНАЛНЕ ДЕЛАТНОСТИ - ЦЕНЕ ПРОИЗВОДЊЕ И ДИСТРИБУЦИЈЕ ВОДЕ И ЦЕНЕ САКУПЉАЊА, ОДВОђЕЊА И ПРЕЧИШЋАВАЊА ОТПАДНИХ ВОДА НА НИВОУ ГРУПАЦИЈЕ ВОДОВОДА
7. ЈЕДНОСТАВНИЈЕ КВАДРАТНЕ ДИОФАНТОВE ЈЕДНАЧИНЕ
 7. ЈЕДНОСТАВНИЈЕ КВАДРАТНЕ ДИОФАНТОВE ЈЕДНАЧИНЕ 7.1. ДИОФАНТОВА ЈЕДНАЧИНА ху = n (n N) Диофантова једначина ху = n (n N) има увек решења у скупу природних (а и целих) бројева и њено решавање није проблем,
7. ЈЕДНОСТАВНИЈЕ КВАДРАТНЕ ДИОФАНТОВE ЈЕДНАЧИНЕ 7.1. ДИОФАНТОВА ЈЕДНАЧИНА ху = n (n N) Диофантова једначина ху = n (n N) има увек решења у скупу природних (а и целих) бројева и њено решавање није проблем,
Факултет организационих наука Центар за пословно одлучивање. Откривање законитости у подацима 3 Вештачке неуронске мреже
 Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима 3 Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима 3 Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
ЛИНЕАРНА ФУНКЦИЈА. k, k 0), осна и централна симетрија и сл. 2, x 0. У претходном примеру неке функције су линеарне а неке то нису.
, осна и централна симетрија и сл. 2, x 0. У претходном примеру неке функције су линеарне а неке то нису.") ЛИНЕАРНА ФУНКЦИЈА 5.. Функција = a + b Функционалне зависности су веома значајне и са њиховим применама често се сусрећемо. Тако, већ су нам познате директна и обрнута пропорционалност ( = k; = k, k ),
ЛИНЕАРНА ФУНКЦИЈА 5.. Функција = a + b Функционалне зависности су веома значајне и са њиховим применама често се сусрећемо. Тако, већ су нам познате директна и обрнута пропорционалност ( = k; = k, k ),
3.1. Однос тачке и праве, тачке и равни. Одређеност праве и равни
 ТАЧКА. ПРАВА. РАВАН Талес из Милета (624 548. пре н. е.) Еуклид (330 275. пре н. е.) Хилберт Давид (1862 1943) 3.1. Однос тачке и праве, тачке и равни. Одређеност праве и равни Настанак геометрије повезује
ТАЧКА. ПРАВА. РАВАН Талес из Милета (624 548. пре н. е.) Еуклид (330 275. пре н. е.) Хилберт Давид (1862 1943) 3.1. Однос тачке и праве, тачке и равни. Одређеност праве и равни Настанак геометрије повезује
СТАБИЛНОСТ ТРАКТОРА У КРИВИНИ
 POLJOPRIVREDNA EHNIKA Godina XXXIV Broj 1, decembar 2009. Strane: 47-52 Poljoprivredni fakultet Institut za poljoprivrednu tehniku UDK: 631.1 СТАБИЛНОСТ ТРАКТОРА У КРИВИНИ Пољопривредни факултет, Београд
POLJOPRIVREDNA EHNIKA Godina XXXIV Broj 1, decembar 2009. Strane: 47-52 Poljoprivredni fakultet Institut za poljoprivrednu tehniku UDK: 631.1 СТАБИЛНОСТ ТРАКТОРА У КРИВИНИ Пољопривредни факултет, Београд
ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ
 ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ предмет: МЕХАНИКА 1 студијски програми: ЗАШТИТА ЖИВОТНЕ СРЕДИНЕ И ПРОСТОРНО ПЛАНИРАЊЕ ПРЕДАВАЊЕ БРОЈ 3. 1 Садржај предавања: Статичка одређеност задатака
ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ предмет: МЕХАНИКА 1 студијски програми: ЗАШТИТА ЖИВОТНЕ СРЕДИНЕ И ПРОСТОРНО ПЛАНИРАЊЕ ПРЕДАВАЊЕ БРОЈ 3. 1 Садржај предавања: Статичка одређеност задатака
Скупови (наставак) Релације. Професор : Рака Јовановић Асиситент : Јелена Јовановић
 Релације. Професор : Рака Јовановић Асиситент : Јелена Јовановић") Скупови (наставак) Релације Професор : Рака Јовановић Асиситент : Јелена Јовановић Дефиниција дуалне скуповне формуле За скуповне формулу f, која се састоји из једног или више скуповних симбола и њихових
Скупови (наставак) Релације Професор : Рака Јовановић Асиситент : Јелена Јовановић Дефиниција дуалне скуповне формуле За скуповне формулу f, која се састоји из једног или више скуповних симбола и њихових
ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ПРЕГЛЕДАЊЕ
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА ПРИЈЕМНИ ИСПИТ ЗА УЧЕНИКЕ СА ПОСЕБНИМ СПОСОБНОСТИМА ЗА ИНФОРМАТИКУ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА ПРИЈЕМНИ ИСПИТ ЗА УЧЕНИКЕ СА ПОСЕБНИМ СПОСОБНОСТИМА ЗА ИНФОРМАТИКУ
Слика 1. Слика 1.2 Слика 1.1
 За случај трожичног вода приказаног на слици одредити: а Вектор магнетне индукције у тачкама А ( и ( б Вектор подужне силе на проводник са струјом Систем се налази у вакууму Познато је: Слика Слика Слика
За случај трожичног вода приказаног на слици одредити: а Вектор магнетне индукције у тачкама А ( и ( б Вектор подужне силе на проводник са струјом Систем се налази у вакууму Познато је: Слика Слика Слика
Закони термодинамике
 Закони термодинамике Први закон термодинамике Први закон термодинамике каже да додавање енергије систему може бити утрошено на: Вршење рада Повећање унутрашње енергије Први закон термодинамике је заправо
Закони термодинамике Први закон термодинамике Први закон термодинамике каже да додавање енергије систему може бити утрошено на: Вршење рада Повећање унутрашње енергије Први закон термодинамике је заправо
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 0/06. година ТЕСТ МАТЕМАТИКА
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 0/06. година ТЕСТ МАТЕМАТИКА
Примена MATLAB-a за прорачун механике индустријског робота и израда лабораторијског модела применом RP технологија
 Примена MATLAB-a за прорачун механике индустријског робота и израда лабораторијског модела применом RP технологија Војислав Вујичић Факултет техничких наука, Чачак, Мехатроника, школска година 2015./2016.
Примена MATLAB-a за прорачун механике индустријског робота и израда лабораторијског модела применом RP технологија Војислав Вујичић Факултет техничких наука, Чачак, Мехатроника, школска година 2015./2016.
ПРЕДВИЂАЊЕ ВРЕМЕНА ИЗРАДЕ КАО ОСНОВА ЗА СИМУЛАЦИЈУ ПОНАШАЊА ПРОИЗВОДНОГ СИСТЕМА У РЕАЛНИМ УСЛОВИМА
 ГЛАСНИК ШУМАРСКОГ ФАКУЛТЕТА, БЕОГРАД, 2005, бр. 92, стр. 7-13 BIBLID: 0353-4537, (2005), 92, p 7-13 Милан Вукићевић UDK: 684:65.015.2 Оригинални научни рад ПРЕДВИЂАЊЕ ВРЕМЕНА ИЗРАДЕ КАО ОСНОВА ЗА СИМУЛАЦИЈУ
ГЛАСНИК ШУМАРСКОГ ФАКУЛТЕТА, БЕОГРАД, 2005, бр. 92, стр. 7-13 BIBLID: 0353-4537, (2005), 92, p 7-13 Милан Вукићевић UDK: 684:65.015.2 Оригинални научни рад ПРЕДВИЂАЊЕ ВРЕМЕНА ИЗРАДЕ КАО ОСНОВА ЗА СИМУЛАЦИЈУ
C кплп (Кпндензатпр у кплу прпстпперипдичне струје)
") C кплп (Кпндензатпр у кплу прпстпперипдичне струје) i u За кплп са слике на крајевима кпндензатпра ппзнате капацитивнпсти C претппставићемп да делује ппзнат прпстпперипдичан наппн: u=u m sin(ωt + ϴ). Услед
C кплп (Кпндензатпр у кплу прпстпперипдичне струје) i u За кплп са слике на крајевима кпндензатпра ппзнате капацитивнпсти C претппставићемп да делује ппзнат прпстпперипдичан наппн: u=u m sin(ωt + ϴ). Услед
У н и в е р з и т е т у Б е о г р а д у Математички факултет. Семинарски рад. Методологија стручног и научног рада. Тема: НП-тешки проблеми паковања
 У н и в е р з и т е т у Б е о г р а д у Математички факултет Семинарски рад из предмета Методологија стручног и научног рада Тема: НП-тешки проблеми паковања Професор: др Владимир Филиповић Студент: Владимир
У н и в е р з и т е т у Б е о г р а д у Математички факултет Семинарски рад из предмета Методологија стручног и научног рада Тема: НП-тешки проблеми паковања Професор: др Владимир Филиповић Студент: Владимир
Ротационо симетрична деформација средње површи ротационе љуске
 Ротационо симетрична деформација средње површи ротационе љуске слика. У свакој тачки посматране средње површи, у општем случају, постоје два компонентална померања: v - померање у правцу тангенте на меридијалну
Ротационо симетрична деформација средње површи ротационе љуске слика. У свакој тачки посматране средње површи, у општем случају, постоје два компонентална померања: v - померање у правцу тангенте на меридијалну
Универзитет у Београду, Грађевински факултет, Булевар краља Александра 73, Београд
 АГГ+ [1] 2013 1[1] Б. Божић, С. Туцикешић Деформациона анализа 1Д мреже маховљанске петље 316 329 315 Архитектонско грађевински факултет I Универзитет у Бањој Луци Faculty of archtecture and cvl engneerng
АГГ+ [1] 2013 1[1] Б. Божић, С. Туцикешић Деформациона анализа 1Д мреже маховљанске петље 316 329 315 Архитектонско грађевински факултет I Универзитет у Бањој Луци Faculty of archtecture and cvl engneerng
АНАЛОГНА ЕЛЕКТРОНИКА ЛАБОРАТОРИЈСКЕ ВЕЖБЕ
 ЕЛЕКТРОТЕХНИЧКИ ФАКУЛТЕТ У БЕОГРАДУ КАТЕДРА ЗА ЕЛЕКТРОНИКУ АНАЛОГНА ЕЛЕКТРОНИКА ЛАБОРАТОРИЈСКЕ ВЕЖБЕ ВЕЖБА БРОЈ 2 ПОЈАЧАВАЧ СНАГЕ У КЛАСИ Б 1. 2. ИМЕ И ПРЕЗИМЕ БР. ИНДЕКСА ГРУПА ОЦЕНА ДАТУМ ВРЕМЕ ДЕЖУРНИ
ЕЛЕКТРОТЕХНИЧКИ ФАКУЛТЕТ У БЕОГРАДУ КАТЕДРА ЗА ЕЛЕКТРОНИКУ АНАЛОГНА ЕЛЕКТРОНИКА ЛАБОРАТОРИЈСКЕ ВЕЖБЕ ВЕЖБА БРОЈ 2 ПОЈАЧАВАЧ СНАГЕ У КЛАСИ Б 1. 2. ИМЕ И ПРЕЗИМЕ БР. ИНДЕКСА ГРУПА ОЦЕНА ДАТУМ ВРЕМЕ ДЕЖУРНИ
F( x) НЕОДРЕЂЕНИ ИНТЕГРАЛ
 НЕОДРЕЂЕНИ ИНТЕГРАЛ") НЕОДРЕЂЕНИ ИНТЕГРАЛ Штa треба знати пре почетка решавања задатака? Дефиниција: Интеграл једне функције је функција чији је извод функција којој тражимо интеграл (подинтегрална функција). Значи: f d F F
НЕОДРЕЂЕНИ ИНТЕГРАЛ Штa треба знати пре почетка решавања задатака? Дефиниција: Интеграл једне функције је функција чији је извод функција којој тражимо интеграл (подинтегрална функција). Значи: f d F F
ЗБИРКА РИЈЕШЕНИХ ЗАДАТАКА ИЗ МАТЕМАТИКЕ ЗА ПРИЈЕМНИ ИСПИТ
 Универзитет у Источном Сарајеву Електротехнички факултет НАТАША ПАВЛОВИЋ ЗБИРКА РИЈЕШЕНИХ ЗАДАТАКА ИЗ МАТЕМАТИКЕ ЗА ПРИЈЕМНИ ИСПИТ Источно Сарајево,. године ПРЕДГОВОР Збирка задатака је првенствено намијењена
Универзитет у Источном Сарајеву Електротехнички факултет НАТАША ПАВЛОВИЋ ЗБИРКА РИЈЕШЕНИХ ЗАДАТАКА ИЗ МАТЕМАТИКЕ ЗА ПРИЈЕМНИ ИСПИТ Источно Сарајево,. године ПРЕДГОВОР Збирка задатака је првенствено намијењена
Једна од централних идеја рачунарства Метода која решавање проблема своди на решавање проблема мање димензије
 Рекурзија Једна од централних идеја рачунарства Метода која решавање проблема своди на решавање проблема мање димензије Рекурзивна функција (неформално) је функција која у својој дефиницији има позив те
Рекурзија Једна од централних идеја рачунарства Метода која решавање проблема своди на решавање проблема мање димензије Рекурзивна функција (неформално) је функција која у својој дефиницији има позив те
Динамика. Описује везу између кретања објекта и сила које делују на њега. Закони класичне динамике важе:
 Њутнови закони 1 Динамика Описује везу између кретања објекта и сила које делују на њега. Закони класичне динамике важе: када су објекти довољно велики (>димензија атома) када се крећу брзином много мањом
Њутнови закони 1 Динамика Описује везу између кретања објекта и сила које делују на њега. Закони класичне динамике важе: када су објекти довољно велики (>димензија атома) када се крећу брзином много мањом