Универзитет у Београду Машински факултет
|
|
|
- Ἐλισάβετ Νικολαΐδης
- 6 χρόνια πριν
- Προβολές:
Transcript

1 Универзитет у Београду Машински факултет ДИЗАЈН У МАШИНСТВУ Методе одлучивања Пројектни задатак Оверио (потпис/датум): Чланови групе: Наставник: Сарадници: Ведран Радиновић Лукић 1085/10 Давор Дробац 122/07 Ненад Андрић 1031/09 Владимир Ајдачић 2/05 Бојан Шуковић 523/05 Проф. др Зоран Миљковић Доц. др Божица Бојовић Најдан Вуковић, дипл. маш. инж. Марко Митић, дипл. маш. инж. Милица Петровић, дипл. маш. инж. Школска година: 2010/2011.

2 УНИВЕРЗИТЕТ У БЕОГРАДУ-МАШИНСКИ ФАКУЛТЕТ Мастер академске студије 1. година Модул: Дизајн у машинству - шк.год. 2010/2011. Предмет: МЕТОДЕ ОДЛУЧИВАЊА Предметни наставник: проф. др Зоран Миљковић ПРОЈЕКТНИ ЗАДАТАК Применом знања и вештина стечених током курса Методе одлучивања одредити пројектно решење инжењерских проблема у домену пројектовања интелигентног понашања агента - мобилног робота. За потребе кретања мобилног робота конфигурисаног по LEGO Mindstorms NXT технологији потребно је развити и извршити имплементацију софтверског решења, базираног на методама одлучивања, које ће са унапред задатом тачношћу извршити одговарајуће пресликавање одређено избором акција које робот треба да оствари у домену изабраног задатка, уз реализацију критеријума дефинисаних функционалним захтевима. Применом вештачких неуронских мрежа, односно концепта машинског учења, одредити оне параметре пројектовања дефинисане алтернативним решењима ( дрво одлучивања ) који ће са унапред задатом тачношћу омогућити решавање следећег проблема: Имплементација метода одлучивања базираних на машинском учењу у домену класификације изгледа окружења мобилног робота Решењем пројектног задатка обухватити: 1. Дефинисати основни циљ пројектовања; 2. Анализу и теоријску поставку проблема; 3. Усвојити фукционалне захтеве (ниво концепцијског пројектовања); 4. Дефинисати сва алтернативна решења која задовољавају постављени циљ пројектовања (ниво детаљног пројектовања); 5. Формирати дрво одлучивања постављеног проблема; 6. Усвојити критеријум(е) на чијим основама ће се одредити одговарајуће решење; 7. Развити и имлементирати модел кретања у Matlab окружењу; 8. Применом концепта машинског учења базираног на вештачким неуронским мрежама одредити скуп параметара који задовољавају функционалне захтеве сходно усвојеном критеријуму пројектовања; 9. Тестирати и верификовати перформансе решења; 2
3 10. Формирати матрицу одлучивања; 11. Дискутовати решења и дати закључак; Одабрано пројектно решење мора да омогући роботу да на основу одређеног и имплементираног решења, базираног на методама одлучивања и на принципима вештачке интелигенције, несметано обави постављени задатак у домену континуираног решавања проблема класификације. Напомене: 1. Емпиријске податке прикупити уз асистенцију наставника и предметних сарадника; 2. Применом концепта машинског учења изабрати одговарајућу архитектуру вештачке неуронске мреже са простирањем сигнала унапред (Feedforward Neural Network); 3. Обучавање извршити са свим понуђеним алгоритмима обучавања вештачких неуронских мрежа у оквиру софтверског пакета Matlab - Neural Network Toolbox; 4. Анализирати моделе и генерисана решења; 5. Имплементирати два најбоља решења на моделу мобилног робота, тестирати изабрана решења и дискутовати излазе ; 6. Изабрати оптимално решење проблема; 7. Одређивање тежинских односа измећу одговарајућих неурона одредити у Matlab окружењу (Neural Network Toolbox) и коришћењем BPnet софтвера; 8. Пројекат ће бити позитивно оцењен ако и само ако приликом одбране пројектних задатака пројектно решење проблема одлучивања базирано на примени техника вештачке интеллигенције омогући несметано функционисање мобилног робота у окружењу; 9. Сва питања, сугестије и евентуалне проблеме предочити у директном контакту са предметним наставником проф. др Зораном Миљковићем и путем електронске поште на zmiljkovic@mas.bg.ac.rs, као и кроз консултације са сарадницима у настави и путем е-поште: nvukovic@mas.bg.ac.rs, bbojovic@mas.bg.ac.rs, mmitic@mas.bg.ac.rs и mmpetrovic@mas.bg.ac.rs; 10. Студенти су у обавези да на предавања и вежбе дођу припремљени јер ће у супротном коначан исход пројектних активности бити негативан; 11. Иницијатива студената у погледу предлога решења проблема, као и у погледу рада на додатним проблемима је више него пожељна, па ће стога сваки додатни рад бити узет у обзир приликом формирања завршне оцене; 12. Рокови израде појединачних пројектних целина дефинисани су планом и програмом предмета (Course Outline); Датум издавања задатка: Рок завршетка задатка: Задатак издали: (Марко М. Митић) (Милица М. Петровић) 3
4 Ведран Радиновић Лукић 1, Ненад Андрић 2, Бојан Шуковић 3, Владимир Ајдачић 4, Давор Дробац 5 Резиме У овом раду разматрано је понашање интелигентног мобилног робота у технолошком окружењу. Потребно је обучити робота неком од метода вештачке интелигенције да доноси исправне одлуке о даљем кретању приликом наиласка на препреку. У овом случају изабране су вештачке неуронске мреже, због своје предности у решавању проблема који нису аналитички описани и који зависе од великог броја непознатих параметара. Желели смо и да прикажемо како ће се робот понашати и какве ће одлуке донети уколико наиђе на препреку која се разликује од оних коришћених у обучавању. Сензор коришћен за скенирање окружења је ултразвучни, чиме смо хтели да видимо да ли је могуће користити сонар уместо знатно скупље камере.добијени резултати показују да је за успешну примену неуронских мрежа неопходно за улаз користити податке који се налазе унутар граница скупа за обучавање, а да се помоћу сонара може успешно извршити класификација различитих типова препрека. Кључне речи: интелигентни мобилни робот, вештачке неуронске мреже, дрво одлучивања 1 Ведран Радиновић Лукић 1085/10, Универзитет у Београду Машински факултет, студент прве године Мастер академских студија. 2 Ненад Андрић 1031/09, Универзитет у Београду Машински факултет, студент прве године Мастер академских студија. 3 Бојан Шуковић 523/05, Универзитет у Београду Машински факултет, студент прве године Мастер академских студија. 4 Владимир Ајдачић 2/05, Универзитет у Београду Машински факултет, студент прве године Мастер академских студија. 5 Давор Дробац122/07, Универзитет у Београду Машински факултет, студент прве године Мастер академских студија. 4
5 Садржај: 1.Увод Дефинисање основног циља пројектовања Поставка проблема Функционални захтеви на нивоу концепциског пројектовања Дефинисање алтеративних решења која задовољавају постављени циљ пројектовања Модел кретања Сензор Бежични начин повезивања Дрво одлучивања Модел кретања Применом концепта машинског учења базираног на вештачким неуронским мрежама одредити скуп параметара који задовољавају функционалне захтеве сходно усвојеном критеријуму пројектовања Вештачке неуронске мреже Функционални захтеви Матрица одлучивања Eкспериментални резултати Анализа резултата Литература Прилог
6 Списак слика: Слика 1. Карикатура одлучивања. 9 Слика 2. Карикатура вештачке интелигенције.. 10 Слика 3. Интеракција аутономног мобилног робота са окружењем [1]..12 Слика 4. Конфигурација робота 13 Слика 5. Управљачка јединица NXT 14 Слика 6. Ултразвучни сензор (енг. Ultrasonic Sensor) 14 Слика 7. Принцип рада ултразвучног сензора 15 Слика 8: Корачни мотор.16 Слика 9. унутрашњост кућишта серво мотора 16 Слика 10. Принцип рада енкодера.17 Слика 11. Шема окружења мобилног робота 18 Слика 12. Приказ робота у експерименталном окружењу..19 Слика 13. Принцип рада мобилног робота помоћу функције atan2.22 Слика 14. Скица одлучивања понашања робота 24 Слика 16 Мобилни робот у два узастопна положаја..26 Слика 17 Инкременти прираштаја лучне координате и угла ротације при кретању десног точка...27 Слика Општа структура неуронске мреже [8]..29 Слика 19. Архитектура имплементиране мреже у пројекту...31 Слика 20. Типови препрека за обучавање.35 Слика 21.Графички приказ мерења препрека са ултразвучним сензором..36 Слика 22.Процес обучавања мреже...37 Слика 23.Кориговано дрво одлучивања.40 6
7 Списак табела: Табела 1. Упоређивање природне и вештачке интелигенције.. 11 Табела 2. Матрица пројектовања на нивоу концепциског пројектовања.. 21 Табела 3. FZ применом концепта базираном на машинском учењу Табела 4. PP применом концепта базираном на машинском учењу Табела 5. Матрица пројектовања, применом концепта базираном на машинском учењу 32 Табела 6 Матрица одлучивања 33 7
8 1.Увод У овом пројектном задатку одрађена је имплементација метода одлучивања базираних на машинском учењу у домену класификације изгледа окружења мобилног робота. Окружење робота представља технолошку средину у којој се изводе технолошки процеси. Олакшавајућа околност је да је та средина представљена као статичка, и ако је у стварним условима динамичка. И поред ове олакшавајуће околности потребно је било предвидети доста проблема и превазићи доста препрека. Мобилни робот уводи се у технолошко окружење са циљем да унапреди продуктивности, смањи изгубљено време транспорта које је последица људског фактора. У задатом окружењу машине опслужује човек са транспортним машинама а наш циљ је да потпуно заменимо транспорт имплементацијом мобилног робота. Задатак је решен применом мобилног робота LEGO Mindstorm NXT. Управљачке функције су решене уз помоћ RWTH Toolbax-a које су имплементиране у софтверском пакету MATLAB. Да би смо испунили услве задатка служили смо се аксијоматском теоријом која је детаљно објашњена у поглављу три. Функционални захтеви задовољени су одговарајућим параметрима пројектовања, где је формирана матрица пројектовања. У другом поглављу дат је детаљан опис поставке проблема. Објашњен је принцип рада мобилног робота, које сензоре користи и актуаторе са управљачком јединицом. Све ово је било веома важно да се темељно одради како би могли да формирамо физички облик робота. Кретање робота на основу задатих команди врши се на основу имплементираног модела кретања који је објашњен у поглављу број шест. Дрво одлучивања формирано је на основу прикупљених података и изгледа препрека. Информације са сензора класификоване су путем вештачких неуронских мрежа и заједно са дрветом одлучивања остварују кретање робота. Вежтачке неуронске мреже објашњене су у поглављу девет. Формиране су у софтверу MATLAB и њихова структура и карактеристике као и начин бирања објашњен је у овом поглављу. Важно је изабрати оптималну вештачку неуронску мрежу јер она представља везу између одлучивања, очитавања сензора и даљег тока акција мобилног робота. Матрица одлучивања формирана је експерименталним путем и приказана је у поглављу десет. Матрица одлучивања је прави показатељ успешности пројектног задатка и на основу ње формирамо и унапређујемо решења како би добили оптимално решење. Управо та алтернативна решења показана су у поглављу четири и представљају смерницу ка развоју оптималних решења. Експериментални резултати дати су у једанаестом поглављу. Закључак је написан у дванаестом поглављу. 8

9 2.Дефинисање основног циља пројектовања Одлучивање је процес промишљања и разумевања проблема уз пресуђивање (према теорији одлучивања-раздвајање добрих акција од лоших) које је коначан исход учења [1]. На основу ове дефиниције управо се ослања пројекат који је приказан у овом раду. Агент који је увом случају мобилни робот обучен је према теорији одлучивања да раздвоји добре акције од лоших. Након разумевања и промишљања мобилни робот је обучен да доноси одлуке које представљају коначан исход учења. Пошто је процес одлучивања класификован на три услова : Одлучивање без ризика Одлучивање са ризиком када је позната вероватноћа остваривања Одлучивање са ризиком када је непозната вероватноћа остваривања Морамо одредити под којим условом ће наш систем бити условњен. Одлучивање са ризиком када је непозната вероватноћа остваривања јесте услов који је наметнут при изради пројектног задатка. Слика 1. Карикатура одлучивања 9
 се дефинише као способност емулирања (опонашања) или дуплирања могуђности сензорског процесирања и доношења одлука унутар компјутерског система [1].")
10 Обучавање агента да доноси одлуке са ризиком кад је непозната вероватноћа остваривања омогућено је са вештачким интелигенцијом. Вештачка интелигенција (машинска интелигенција) се дефинише као способност емулирања (опонашања) или дуплирања могуђности сензорског процесирања и доношења одлука унутар компјутерског система [1]. Вештачка неуронска мрежа је парадигма (узор,пример) вештачке интелигенције која се дефинише као конективни модел за резоновање заснован на аналогији са мозгом, уз наглашену конгитивну способност да учи и врши генерализацију стеченог знања [1]. Вештачка интелигенција са њеном парадигмом вештачким неуронским мрежама омогућила је, кроз разне софтвере, обучавање мобилног робота. На њеној структури и основи заправо лежи процес пресуђивања тј. раздвајања добрих акција од лоших. Пошто се наш агент налази у реалном окружењу и у реалном времену, неуронске мреже обезбеђују значајне предности у решавању задатака. За наш пројектни задатак у окружењу агента владају статички услови. Слика 2. Карикатура вештачке интелигенције Неуронске мреже (енг. Artificial Neural Networks) се састоје од великог броја густо повезаних процесорских елемената (такозваних чворова ) који врше паралелно процесирање (једновремено) и који су организовани по неким регуларним архитектурама. То је стога математички модел инспирисан нервним системом. Битно је то да је знање садржано у тежинским односима (коефицијентима), односно везама између чворова. Елемент за процесирање динамички одговара на улазни стимуланс и при томе је овај одговор комплетно зависан од локалне информације садржане у његовом окружењу. Главно је то да неуронска мрежа има особину да учи, памти и генерализује на основу обучавајућег скупа [1]. 10
11 Табела 1. Упоређивање природне и вештачке интелигенције Могућности Чување знања Умножавање и ширење знања Укупно коштање знања Конзистентност интелигенције Документовање процеса и знања Природна интелигенција Непостојано са организационог становништва Компликовано, скупо ангажује време Врло високо Може бити склона грешкама не конзистентна.повремено некомплетна Компликовано скупо Вештачка интелигенција Постојано Лако, брзо једноставно,јефтино Може бити врло ниско Конзистентна и темељна Прилично лако и јефтино Креативност Може бити врло висока Ниска надахнута Употреба сензорских искустава Препознавање обрасца и односа Закључивање Директна и богата могућностима Брзо, лако се објашњава Користи широк контекст искустава Мора најпре бити интерпретирана, ограничена Људи још увек боље уче него што се могу обучити машине, мада машине понекад превазиђу човека Добро само у уским, фокусираним и стабилним доменима 11

12 Учење представља једну од седам области развоја и примене вештачке интелигенције. Да би учење употребили на нашем агенту морамо да знамо шта представља. Учење представља искуство које мења стање неког живог организма тако да ново стање функционише боље у истоветној ситуацији.[1] У пројектном задатку искуство настало учењем биће употребљено за боље функционисање мобилног робота. Конкретно робот ће бити обучаван да препознаје препреке и на основу њих да даје одлуку о његовом следећем потезу. Код машинског учења тај процес је представљен кроз математичкоалгоритамске зависности, који омогућују вештачком систему (мобилном роботу) да учи на основу искуства, преко примера или на бази аналогије. Слика 3. Интеракција аутономног мобилног робота са окружењем [1] Основни циљ пројектовања је обучити мобилног робота коришћењем вештачке интелигенције,омогућити му да донесе правилну одлуку на основу искуства кроз машинско учење а самим тим да у реалном времену поседује интеракцију са окружењем. 12

13 3.Поставка проблема У изради задатка конфигурисан је робот типа LEGO Mindstorms NXT у склопу са ултразвучним сензором блискости приказан на слици 6, чији су подаци обрађени у програмском пакету Matlab, који је коришћен за препознавање препреке у циљу проналажења путање кретања робота. Да би робот радио на задати начин, сензор и мотори треба да буду повезани на одговарајуће портове. Улазни портови се користе за сензоре и унос података, док се излазни портови користе за актуаторе (у овом случају серво моторе). Слика 4. Конфигурација робота су: Основни делови LEGO Mindstorms NXT робота коришћени у изради пројекта Управљачка јединица NXT је интелигентна, компјутерски контролисана управљачка јединица Mindstorms робота (слика 2). Управљачка јединица има четири улаза тако да могу да се споји четири сензора и три излаза на које се могу спојити корачни мотори преко RJ22 каблова. На кућишту се налази 100х64 пиксела монохроматски LCD екран и четири тастера који се могу користити за навигацију корисничког интерфејса помоћу хијерархијског менија. Такође има и звучник који може да репродукује аудио датотеке а снага се испоручује са 6 АА (1,5 V свака) батеријa. - 13


14 Слика 5. Управљачка јединица NXT Ултразвучни сензор (енг. Ultrasonic Sensor) је сензор којим робот мери растојање неког предмета и реагује на покрет (слика 2). Ултразвучни сензор може мерити растојање од сензора па до објекта који се налази испред сензора, као и да детектују покрет. Може да покаже растојање у cm и инчима. Максимална удаљеност коју може мерити је 233 cm са тачношћу од 3 центиметра. Слика 6. Ултразвучни сензор (енг. Ultrasonic Sensor) Ултразвучни сензори су уређаји који користе звучне таласе изнад Hz, који су ван домета људског слуха, да се измери и израчуна удаљеност од сензора до одређеног објекта. Сензор има претварач који вибрира када се на његове крајеве доведе електрични напон. Вибрације сабијају и проширују молекуле ваздуха у таласима са предње стране сензора до циљног објекта. Сензор одашиље и прима звучне таласе. Ултразвучни сензор ће мерити растојање одашиљањем звучног 14

15 таласа, а затим "слушањем" за сетовани временски период, што омогућава повратак одјека звучног таласа одбијеног од циљаног објекта, пре новог одашиљања. Слика 7. Принцип рада ултразвучног сензора Пошто ултразвучни сензори користе звук а не светлост за детекцију, они раде у условима где фотоелектрични сензори не могу. Ултразвучни сензори су одлично решење за детекцију јасних објеката и за мерење нивоа течности, захтеви са којима се боре фотоелектрични због провидних циљева. Боја циљног објекта и/или рефлексија не утичу на ултразвучни сензор који могу поуздано да раде у окружењима са високим одсјајом. Ултразвучни сензор дефинитивно има предности када се реагује на јасан објекат, ниво течности, високо рефлектујуће или металне површине. Ултразвучни сензори такође функционишу добро у влажним срединама где се оптички зрак може рефлектовати од капљица воде. Међутим, ултразвучни сензори су осетљиви на температурне промене или ветар. Са оптичким сензорима, такође можете имати малу величину тачке, брз одзив и у неким случајевима, може се пројектовати на циљ да помогне са поравнањем сензора. Било која бука на фреквенцији која је прихватљива за ултразвучни сензор, може да утиче на излаз сензора. Ово укључује пискаве звукове као што ствара звиждук, шиштање вентила, компресовани ваздух или пнеуматски уређаји. Такође, сметње се могу добити ако се два ултразвуча сензора исте фреквенције нађу близу. Брзина звучних таласа ултразвучних сензора зависи од промене температуре. Како температура расте, звучни таласи путују брже до и од циља. Иако циљ не може да се помера, сензору ће изгледати као да је циљ ближе. Струјања ваздуха због пнеуматске опреме или вентилатора може да скрене или поремети пут ултразвучног таласа. Што би могло да доведе до тога да сензор не препознаје исправно раздаљину мете. Брзина звука је знатно спорије од брзине светлости, дакле ултразвучни сензор ће, по самој својој природи, бити спорији него оптички сензор. 15


16 Најпогоднији циљеви за употребу ултразвучних сензора су велике, равне, чврсте површине материјала као што су метал, керамика, стакло или дрво. Одредиште за очитавање треба увек да буде у правцу нормале на сензор. Мека или површина неправилног облика, као што су плочице, пиљевину или пена треба избегавати. Серво мотор који омогућава прецизно кретање робота је врста DC мотора која пуну ротацију вратила изводи кроз низ дискретних позиција (корака), у којима по потреби могу и стати. Слика 8: Корачни мотор Мотор у свом кућишту има уграђен редуктор и оптички енкодер који очитава са прецизношћу од једног степена ротације. Статор се састоји од великог броја електромагнета. Ротор је од гвожђа у облику зупчаника. Када се упали први електромагнет, он привуче и наспрам себе позиционира зупце ротора. У тој позицији зупци су мало померени у односу на следећи пар електромагнета. Када се прекине напајање првом и доведе напајање другом пару електромагнета зупци се померају у позицију наспрам другог пара електромагнета. Кроз серију таквих померања, изазваних радом микроконтролера, вратило ће направити пун круг. Прецизност корака зависи од конструкције корачног мотора. Слика 9. унутрашњост кућишта серво мотора 16

17 Енкодер је сензор који служи за одређивање: 1) Број обртаја вратила 2) Позицију вратила (у односу на статор) 3) Смер обртања вратила Посебан оптокаплер је задужен за реперни прорез. Када он пропусти светлост са диоде добијамо информацију да је вратило направило пун обртај. Податак о угаоној брзини вратила добија се применом једноставне математике. Један оптокаплер прати реперни прорез, док други прати прорезе на главном кругу. Позиција вратила се добија из података колико је прореза на главном кругу прошло од последњег пролаза реперног прореза [5]. Слика 10. Принцип рада енкодера 17
18 Експеримент тј. обучавање и тестирање робота је реализовано у лабораторијским условима (слика 10) који су креирани тако да репрезентују што приближније услове могуће примене моблиног робота у технолошком окружењу. Међутим, реално окружење поседује својства која битно утичу на интеракцију са аутономним роботом а разликују се од лабораторијских. Тако да за коришћено окружење у изради пројектног задатка можемо да кажемо да је у границама доступности сензора, што значи да робот може из било ког места у окружењу да очита неку препреку тј. да су препреке довољно близу. Док у реалним окружењу ово није случај јер сензори нису довољно савршени тј. робот се мора приближити препреци.исто тако за коришћено окружење може се рећи да је детерминистичко јер робот ради у уређеној средини.још једно својство које се разликује од реалног окружења јесте да робот нема потребе да одлаже одлуке о неким акцијама или када је боље одмах реаговати, па можемо да кажемо да је окружење статичко. -Мобилни робот у окружењу Слика 11. Шема окружења мобилног робота 18

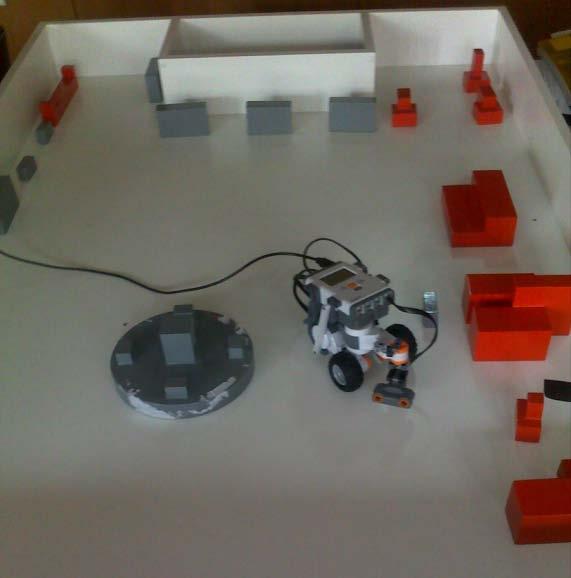
19 Слика 12. Приказ робота у експерименталном окружењу 19
20 4.Функционални захтеви на нивоу концепциског пројектовања Аксиоми пројектовања су основни принципи на основу којих се могу развијати многе специфичне методологије за анализу и решавање проблема. Постоје два аксиома. Аксиом 1 дефинише однос између функционалног и физичког домена, док се Аксиом 2 бави комплексношћу пројекта. Аксоми имају следећи облик : Аксиом 1 Аксиом независности Успоставити независност функционалних залитева. Аксиом 2 Информациони аксиом Минимизирати информациони садржај пројекта. Аксиом 1 прави разлику између доброг и лошег пројекта, односно прихватљивог и неприхватљивог пројекта. Аксиом 2 представља критеријум за избор оптималног пројектног решења између више решења која задовљавају Аксиом 1. Математички приказ аксиома 1 дата је матричном јеначином пројектовања: у којој је {FR} вектор функционалних захтева, {DP} вектор параметара пројектовања, а [A] матрица пројектовања. Математичка формулација аксиома један је дата формулом (3.1): {ФЗ} = [А]{ПП} (3.1) {FZ} вектор функционалних захтева [А] матрица пројектовања производа {PP} вектор параметара пројетовања Приликом формирања матрице пројектовања морамо водити рачуна да оба аксиома буду задовољена. Прво се дефинишу функционални захтеви, а после се на основу њих усвајмо праметре пројектовања. Да би матрица била правилно дефинисана потребно је да сваки ФЗ одговара одређеном ПП. 20
21 FZ 1 кретање агента(мобилног робота) FZ 2 препознавање препрека FZ 3 одлучивање PP 1 Корачни електромотор PP 2 Ултразвучни сензор PP 3 Вештачка неуронска мрежа Табела 2. Матрица пројектовања на нивоу концепциског пројектовања FZ1 FZ2 FZ3 PP1 X 0 0 PP2 0 X 0 PP3 0 0 X Ова матрица је квадратна и распрегнута што значи да сваком ФЗ одговара по један ПП. Оваква расподела омогућује реализацију пројектавања и представља оптимално решење за постављени задатак. 21
22 5.Дефинисање алтеративних решења која задовољавају постављени циљ пројектовања. Главни функционални захтеви које треба испунити су одређивање положаја робота у окружењу и планирање путање. Одређивање положаја се даље своди на управљање и препознавање препрека. 5.1 Модел кретања Модел кретања може бити брзински или на основу пређеног пута (одометрија), и у зависности од тога који је изабран, разликују се и компоненте вектора управљања. У овом случају (одометрија), са енкодера се добијају вредности s d и s l, које се користе за одређивање координата робота у окружењу. Уколико би се користио брзински модел компоненте вектора управљања били би брзина робота v t и угаона брзина ω t. Брзински и модела кретања на основу пређеног пута такође се могу извести помоћу других формула и функција. Функција ATAN2 такође нам омогућује извођење модела кретања на основу на основу две ротације и једне транслације.модел кретања преко ове функције није тражен у задатку зато и није до детаља разрађен али могао би се користити као алтернативно решење. δδ tttttttttt = (xx xx) 2 +(yy yy) 2 (4.1) δδ rrrrrr 1 = aaaaaaaa2(yy yy, xx xx) θθ (4.2) δδ rrrrrr 2 = θθ θθ δδ rrrrrr 1 (4.3) atan y iiii xx > 0 x sign(y) π atan y if x > 0 atan2(y, x) = x 0 if x = y = 0 sign(y) π if x = 0, y 0 2 (4,4) Слика 13. Принцип рада мобилног робота помоћу функције aaaaaaaa2 22
23 Функција atan2 се уводи у модел кретања када робот приликом заустављања заузима поново почетни положај. Управо убацивањем ове функције омогућујемо коришћење само једног координатког почетка на мапи и да се робот креће на основу њега. Такође нам омогућава да увидимо где се тачно налази мобилни робот у односу на окружење. 5.2 Сензор Проблем препознавања препрека као ФЗ1.1.2 (табела 5) може се решити коришћењем различитих типова сензора. Међу најчешће коришћеним су ултразвучни сензор или камера. Циљ укључивања камере у систем мобилног робота је обезбеђивање способности машинског гледања. Овакви системи имају велике могућности препознавања у сложеним индустријским системима, али захтевају веће ресурсе због неопходног формирања и процесирања слике. Са друге стране могућности сонара су ограничене, али поред једноставнијег алгоритма за процес препознавања, и цена система у овом случају је знатно мања. 5.3 Бежични начин повезивања Повезивање мобилног робота са компјутером је решено преко кабла. Овај начин што се тиче комуникације је поуздан али смањује његову мобилност. Да би се повећала његова мобилност могуће је повезати компјутер и мобилни робот путем wireless система. На тај начин омогућили би слободу кретања робота невезавши га за дужину кабла. 23
24 6.Дрво одлучивања Дрво одлучивања представља хијерархијску структуру података са имплементираном стратегијом за доношење одлука по принципу раздвоји-иизабери [8]. То је ефикасан непараметарски метод који се користи за класификацију и регресију. Овај хијерархијски модел за супервизорско машинско учење чине елементи који учествују у доношењу одлука на основу имплементирања тест- функције f m (x) са дискретним излазним вредностима. Дрво одлучивања има хијерархијску структуру организовану тако да садржи интерне и екстерне чворове. Проблеми класификације имају карактеристику да се одговори на питања у њиховом решавању налазе у предефинисаном скупу. Ако очитам леви зид настављам право Ако очитам десни зид настављам право Ако очитам коси леви зид скрећем лево Ако очитам коси десни зид скрећем десно Ако очитам леви зид и високу вредност за препреку П скрећем лево Ако очитам десни зид и високу вредност за П скрећем десно Ако очитам препреку П окрећем са за 180 степени Слика 14. Скица одлучивања понашања робота 24
25 На слици 13 приказано је дрво одлучивања при чему услов О1 испитује да ли је највећа вредност излазног вектора на првој позицији. Слично је и за остале вредности, О2, О3 и О4. Последње питање није ни постављено јер се претпоставља да је у том случају максимална вредност на позицији 5. О1 су вредности за десни прави зид, О2 за леви прави, О3 за десни коси, О4 за леви коси и О5 за препреку типа П. Слика 15. Дрво одлучивања 25
26 7.Модел кретања Основни модели кретања који се користе за одређивање положаја мобилног робота у простору или равни су: модел кретања на основу брзине модел кретања на основу пређеног пута (одометрија) У овом случају изабран је други модел. Како се ради о раванском кретању, положај је одређен вектором стања u(t)=[x θ] y T, при чему је позиција одређена координатама x и y, а оријентација углом θ, мереним у односу на x осу (слика 1). На датој слици се виде два узастопна положаја робота у тренуцима t и t', са прираштајима компоненти вектора стања. Робот има два погонска точка који се могу окретати независно један од другог и тако управљати смером (оријентацијом). Енкодери мере угао окретања точкова, и за познати полупречник може се израчунати пређени пут. Мерења се врше у временском интервалу Δt, те се положај рачуна сумирањем инкремената лучне координате Δs и угла ротације Δθ. Где су: x, y, θ положај робота у координатном систему у почетном положају x ', y', θ' положај робота у координатном у неком t' тренутку Слика 16 Мобилни робот у два узастопна положаја Математичка формулација кретања дата је једначином: u ( t' ) = u( t) +u( Δt) (6.1) 26
27 односно у скаларном облику: x' = x + Δx y' = y + Δy (6.2) θ' = θ + Δθ при чему су вредности инкремената: Δx = Δscos ( θ + Δθ) Δy = Δssin ( θ + Δθ) (6.3) Δθ d Δθ Δθ = l 2 Са енкодера се очитава вредност угла ротације точка и преко познате релације из кинематике израчунава вредност инкремента лучне координате за точак. Затим се помоћу једначине (4) израчунава вредност и за инкремент угла ротације истог точка (слика 2). Δsd = b Δθ d Δsd Δθd = (6.4) b На слици 2 приказана је промена вредности Δs и Δθ при кретању само десног точка. Аналогно се израчунавају вредности и за леви. Даље се сумирају вредности добијене за леви и десни точак и тако добија вредност помераја тежишта мобилног робота. Слика 17 Инкременти прираштаја лучне координате и угла ротације при кретању десног точка При крајњем израчунавању помераја тежишта, вредност лучне координате се добија сабирањем вредности за оба точка, док је угао ротације једнак разлици одговарајућих вредности. 27
28 Δθ = Δθ d Δs = Δθl Δs = 2 Δsd + Δs l 2 d Δs 2b l (6.5) Коначни облик једначина кретања мобилног робота добија се заменом претходних израза у једначину (1): Δsd + Δsl Δsd Δsl x' = x+ cos θ + 2 2b Δsd + Δsl Δsd Δsl y' = y + cos θ + (6.6) 2 2b Δs d Δs θ'= θ + l 2b 28
29 8. Применом концепта машинског учења базираног на вештачким неуронским мрежама одредити скуп параметара који задовољавају функционалне захтеве сходно усвојеном критеријуму пројектовања 8.1Вештачке неуронске мреже Теорија одлучивања (John Von Neumann i Oskrar Morgenstern 1944) примењује фундаменталну идеју по којој је данас агент интелигентан и рационалан, ако и само ако врши избор акција које обезбеђују највећу очекивану корисност [8]. Неуронска мрежа је парадигма вештачке интелигенције која се дефинише као конективни модел за резоновање заснован на аналогији са мозгом, уз наглашену когнитивну способност да учи и врши генерализацију стеченог знања [8]. Генерализација подразумева закључивање о непознатим објектима на основу познатих објеката. Објекти се морају презентовати у облику који је погодан за алгоритам учења, односно преко неких њихових атрибута. Сваки од изабраних атрибута може имати вредност која припада неком унапред задатом скупу, и те вредности су најчешће нумеричке [9]. Мреже се креирају повезивањем већег броја основних јединица (неурона) у структуру оријентисаног графа. При томе свака мрежа има скуп неурона који претстављају улаз у мрежу (компоненте улазног вектора) и скуп неурона који су излаз из мреже (компоненте излазног вектора). Неурони се најчешће организују у облику уређених слојева, где излази из неурона једног слоја претстављају улазе у неуроне наредног. Сви неурони који нису у улазном или излазном слоју називају се скривеним, а такви слојеви су скривени слојеви. Слика Општа структура неуронске мреже [8] 29
30 Неурони или процесирајући елементи примају улазне сигнале/информације од окружења или од других неурона преко синапси или веза које могу бити екситационе (побуђивачке) или инхибиторне [8]. Како је модел ВНН заснован на аналогији са људским нервним системом, потребно је дефинисати функцију чији ће излаз давати вредност аналогно вредности напона у биолошком неурону. То је активациона функција, и она даје везу између активације неурона и излазног сигнала. Активациона функција је најчешће бинарна, сигмоидна или логаритамска. Бинарна активациона функција има само две вредности и коришћена је у најранијем моделу вештачке мреже перцептрона. Перцептрон заправо претставља хиперраван одлучивања и додељује вредност 1 објектима са једне стране хиперравни, а вредност 0 (или -1 у случају функције sgn(x) ) објектима са друге [9]. Приликом креирања мрежа често је потребно претставити нелинеарне диференцијабилне функције, те се не може користити бинарна активациона функција, пошто она није непрекидна, а самим тим ни диференцијабилна. Зато се најчешће користи сигмоидна, која је блиска бинарној, осим у околини нуле, где расте стрмо, али је диференцијабилна Учење се врши подешавањем тежинских вредности између неурона тако да излази мреже имају вредности блиске вредностима које су познате из експеримента или апроксимиране функције за дате вредности улаза мреже.. У случају да су подаци лиенарно сепарабилни, може се користити перцептрон и бинарна активациона функција, и у том случају се алгоритам зауставља у коначно много корака. Међутим у случајевима нелинеарног раздвајања бинарна функција условљава да неуронска мрежа има дисконтинуитете [2]. У том случају се полази од грешке тренирања која се минимизује генералисаним делта правилом. Тако се добија правило Backpropagation алгоритма који омогућава подешавање тежинских односа у смеру супротном од тренутног градијента грешке [1,9]. Тежински односи се током процеса обучавања мењају по принципу минимизације грешке учења, све док се не постигне жељена трансформација улаза у излаз. Вештачке неуронске мреже обезбеђују значајне предности при решавању проблема које је немогуће описати аналитички услед великог броја независних параметара. Обучаване су мреже са различитим бројем скривених слојева и различитим бројем неурона у њима. Најбољи резултати су добијани за мреже са једним скривеним слојем, са 40 до 80 неурона, и са 2 скривена слоја са 50 до 70 неурона у првом и 10 д0 20 у другом скривеном слоју. 30

31 Мрежа која је имплементирана у току пројектонг задатка има два скривена слоја са 60 неурона у првом и 5 у другом. Слика 19. Архитектура имплементиране мреже у пројекту 31
32 8.2 Функционални захтеви Пројектовање се може дефинисати као процес стварања синтетизованих решења у облику производа, процеса или система, која су добијена кроз преслиаквање између функционалних захтева у функционалном домену и параметара пројектовања у физичком домену [4]. Процес пројектовања почиње са успостављањем FZ у циљу стварања физичког објекта или процеса који их задовољава. Табела 3. FZ применом концепта базираном на машинском учењу FZ 1.1 Положај робота у технолошком статичком окружењу FZ 2.1 FZ Управљање FZ Препознавање препрека Путања робота Табела 4. PP применом концепта базираном на машинском учењу PP 1.1 Параметри робота у статичком окружењу PP PP Очитавање са Очитавање са сонара енкодера [Δs d, Δs l ] [Us] PP 2.1 Угао ротације Табела 5. Матрица пројектовања, применом концепта базираном на машинском учењу FZ 1.1 FZ 2.1 FZ FZ FZ PP 1.1 PP X 0 0 PP X 0 PP 2.1 PP X 32
33 9.Матрица одлучивања Одлучивање са ризиком се формализује увођењем матрице одлучивања. Она одређује све комбинације понашања са вероватноћом остваривања-реализације догађаја. Идеалан случај би био уколико би се само у главној дијегонали били бројеви у овом случају јединице. Таква матрица је дијегонална матрица. Табела 6 Матрица одлучивања Препрека Десна Лева Коса десна Коса лева П Десна 0,75 0,1 0,05 0,1 0 Лева 0 0,6 0 0,3 0,1 Коса десна 0,15 0,1 0,7 0 0,05 Коса лева 0 0,05 0,05 0,65 0,25 П 0,1 0, ,85 Табела 6 добијена је на основу мерења. Мерења су се изводила у лабораторији и свака препрека је испитивана по 20 пута. Очитавања за сваку препреку су убачене у табелу и на крају је израчунат проценат одлуке мреже за дату препреку. Резултати матрице одлучивања показују да имплементирано решење није задовољавајуће и да га треба кориговати. Могућа побољшања огледају се у избору нових обучавајућих парова, добијених снимањем у истим условима у којим мобилни робот треба да обавља задатак. 33
34 10.Eкспериментални резултати Постоји велики број различитих софтверских пакета за рад са ВНМ-а. Како је за управљање роботом коришћен Matlab пакет, избор додатка за исти под називом neural network toolbox био је логичан избор за креирање и тренирање ВНМ-а. Овај пакет омогућује креирање различитих типова мрежа, са различитим активационим функцијама. Подаци на основу којих се врши генерализација у процесу учења називају се подаци за тренинг, а њихов скуп тренинг скуп. Тестирање наученог знања које на подацима на основу којих је учено доводи до значајно бољих резултатаод оних који се касније могу добити у применама. Због тога је пре употребе потребно проценити квалитет наученогзнања у складу са унапред задатим скупом за тестирање. Тест скуп би требало да буде дисјунктан са тренинг скупом. Један од стандардних начина је да се за тестирање издвоји четвртина или неки мањи проценат, а да се тренинг врпти на остатку. Избор скупа за тестирање је најчешће случајан, али боље је уколико се сви подаци поделе на n приближно једнаких подскупова, и издвојити један за тестирање [9]. При обучавању могу се одабрати и мењати параметари обучавања и дефинисати скупови података за обучавање, валидацију и тестирање. Излаз из процеса обучавања који се користио за избор оптималне мреже је вредност линеарне регресије. Као критеријум заустављања BP алгоритма коришћена је вредност грешке учења, односно обучавање је вршено све док се грешка не спусти испод одређеног прага. Уколико не дође до испуњења овог услова, обучавање ће се вршити у унапред дефинисаном броју итерација. Улазни подаци су добијени снимањем окружења ултразвучним сензором у опсегу од -90 до +90 у односу на правац кретања робота. Међутим већ је у овом стадијуму експеримента дошло до стварања мале грешке, услед немогућности мотора да ротира сензор за тачно 20 степени почевши од почетног положаја θ= Ово је касније проузроковало лоше очитавање и препознавање типа препреке у технолошком окружењу. За обучавање мреже коришћен је и neural fitting tool који је намењен за апроксимацију познате функције и има искључиво један скривени слој. Међутим, бољи резултати су добијени коришћем само појединих потребних функција nntoolbox-a и одабиром одговарајућих параметара. Улаз у мрежу су измерене вредности за пет различитих типова препрека. Како је за сваку препреку било 20 мерења, улазни подаци су у матрици димензија 9x100. Излаз је у облику вектора са 5 компоненти, при чему је у одређеним случајевима дефинисан опсег у ком се могу наћи излазне вредности [0,1]. 34





35 Излазном вектор димензија 5x1 дефинисан је тако да се за сваки тип препрека на одређеној позицији налази јединица, а на осталим нуле. У том случају, при наиласку на нову препреку, за коју се улазне врености налзе у скупу за тестирање, максимална вредност биће мања, али веома блиска јединици. Проблем се може јавити у случају да се појави нова, непозната препрека, а што је могуће у реалном технолошком окружењу. Тада је максимална вредност знатно мања од 1, а друга највећа је прилично већа од 0. Слика 20. Типови препрека за обучавање 35
36 вредност са сензора вредност са сензора редни број мерења редни број мерења вредност са сензора редни број мерења вредност са сензора редни број мерења вредност са сензора редни број мерења Слика 21.Графички приказ мерења препрека са ултразвучним сензором 36

37 Слика Процес обучавања мреже Између свих ових модела најбољи резултат је добијен за мрежу са 60 и 20 неурона у скривеним слојевима. Процес и резултати обучавања дати су на слици 2. Овде је дат приказ дела једног од излазних фајлова broj skrivenih slojeva je N=2 broj neurona u 1. skrivenom sloju je N=60 broj neurona u 2. skrivenom sloju je N=20 parametar ucenja je µ= e-05 Regression R= do= lo=
38 kdo= klo= po= У овом случају сви подаци су коришћени за обучавање мреже, те је вредност регресије и свих излаза приближно једнака јединици. Зато је извршена измена кода, тако да су раздвојени скупови података за обучавање, валидацију и тестирање. broj skrivenih slojeva je N=2 broj neurona u 1. skrivenom sloju je N=40 broj neurona u 2. skrivenom sloju je N=10 parametar ucenja je µ= e-05 Regression R= do= lo=
39 kdo= klo= po= Одлука о избору путање се доноси на основу позиције максималне вредности компоненте излазног вектора. Као што се види у претходно датим излазним фајловима, у случајевима коришћеним за обучавање, препреке се јасно разликују. Међутим када се робот нађе у новом окружењу, са другачијим препрекама, излаз из сонара може имати вредности које се знатно разликују од вектора коришћеног за обучавање мреже. Први покушаји интелигентног кретања робота су дали обећавајуће резултате, али као што се може видети у матрици одлучивања, у неким случајевима вероватноћа доношења праве одлуке је мања од потребне. Да би се избегло доношење погрешне одлуке, у дрво одлучивања су додати случајеви у којим робот наилази на десни или леви ћошак. Наиме, у таквим случајевима максималну вредност имају компоненте које одговарају десном или левом правом зиду, али је њихова вредност углавном знатно мања од јединице. При томе је и вредност која одговара препреци типа П (последња, пета компонента) знатно већа од осталих, те служи као додатни параметар на основу ког се доноси одлука о избору путање. 39
40 Слика 23.кориговано дрво одлучивања 40
41 11. Анализа резултата Приликом прикупљања експерименталних података снимање је вршено изван технолошког окружења у коме се робот креће, односно без препрека у виду машина, радника и сл. У том процесу је препрека у виду десног или левог ћошка занемарена, а планирано је да се касније у процесу одлучивања убаци грана која ће на основу свих вредности излазног вектора донети исправну одлуку о скретању. Иако је било могуће снимити експерименталне податке у технолошком окружењу, овде смо желели да видимо како ће се понашати робот и какве ће резултате дати ВНМ уколико су улазни подаци у току рада другачији од података коришћених за обучавање. Како су вредности вероватноће доношења исправне одлуке биле испод захтеваног нивоа, било је потребно извршити одређене измене у пројекту. Један од начина било је поновно снимање улазних података и обучавање робота у задатом технолошком окружењу. Међутим овде смо изабрали да изменимо дрво одлучивања са постојећим подацима, али и обучавање великог броја мрежа различите топологије. Овим приступом решавању проблема желели смо да претставимо и предности и недостатке вештачких неуронских мрежа као избора у интелигентним технолошким системима. Добијени резултати показују да се коришћењем ВНМ-а може добити добро решење проблема кретања интелигентног робота. Тачност добијених резултата зависи од количине и квалитета улазних података, скупова података који се користе за обучавање, валидацију и тестирање, као и топологије мреже. Са друге стране, уколико се приликом кретања за улаз користе подаци који се налазе изван граница скупа за обучавање, робот није у стању да увек донесе исправну одлуку. 41
42 12. Закључак На основу усвојеног модела кретања и на основу обучених вештачких неуронских мрежа, коришћењем метода одлучивања уз имплементацију у софтверском пакету MATLAB омогућено је интелигентно понашање мобилног робота у задатом експерименталном окружењу. Главни показатељ успешности имплементације мобилног робота у експерименталној средини је матрица одлучивања. Наш мобилни робот није остварио задовољавајуће резултате тако да следећа разматрања треба усмерити на остваривање жељених резултата. Потребно је да правац будућег размишљања буде усмерен ка усавршавању вештачких неуронских мрежа, обучавајућих парова као и коришћењу алтернативних сензора за комуникацију са окружењем. 42
43 Литература [1] Миљковић З., Алексендрић Д., Вештачке неуронске мреже Збирка решених задатака са изводима из теорије, Универзитет у Београду Машински факултет, [2] Миљковић З.Системи вештачких неуронских мрежа у производним системима, Универзитет у Београду Машински факултет, [3] Rodney A. Brooks, A robust layered control system for a mobile robot, IEEE Journal of robotics and automation, [4] Б.Бабић, предавања из аксиоматских метода, Универзитет у Београду Машински факултет, [5] А.Вег, предавања из мехатронике, Универзитет у Београду Машински факултет, [6] [7] robot,us,4,servomoteur-lego-nxt.cfm [8] Миљковић З.Предавања из предмета методе одлучивања, Универзитет у Београду Машински факултет, 2009 [9] Јаничић П., Николић М., Скрипта из предмета вештачка интелигенција, Универзитет у Београду Математички факултет
44 Прилог 1 Програм за обучавање мреже clc,clear, close all % Ucitavanje snimljenih podatake load d.dat load l.dat load kd.dat load kl.dat load p.dat t=1; % Kreiranje ulaznog vektora i=[d l kd kl p]; % Kreiranje izlaznog vektora for t=1:20 od(:,t) = [ ]'; ol(:,t) = [ ]'; okd(:,t) = [ ]'; okl(:,t) = [ ]'; op(:,t) = [ ]'; end o = [od ol okd okl op]; % Definisanje opsega komponenti izlaznog vektora kk=[zeros(size(i,1),1) ones(size(i,1),1)]; for j=1:9 kk(j,2)=255; end % Definisanje arhitekture mreze net_ex = newff([kk],[60,5],{'tansig','logsig'},'trainlm'); % Definisanje parametara obucavanja net_ex.trainparam.show = 50; net_ex.trainparam.lr = 0.05; net_ex.trainparam.mc = 0.9; net_ex.trainparam.mu = ; net_ex.trainparam.epochs = 500; net_ex.trainparam.goal = 1e-6; net_ex.trainparam.max_fail = 10; % Treniranje mreze net_ex = train(net_ex,i,o); % Izlazni vektor y1 = sim(net_ex,i(:,:)); do=y1(:,1:20); lo=y1(:,21:40); kdo=y1(:,41:60); klo=y1(:,61:80); 44
45 po=y1(:,81:100); % Crtanje grafika regresije plotregression(o,y1); R=corrcoef(o,y1); % Stampanje rezultata fid=fopen('podaci08.txt', 'w'); fprintf(fid,'broj skrivenih slojeva je N=%d\n',net_ex.numLayers-1); for t=1:(net_ex.numlayers-1) fprintf(fid,'broj neurona u %d',t); fprintf(fid,'. skrivenom sloju je N=%d\n',net_ex.layers{t}.size); end fprintf(fid,'parametar ucenja je µ=%d\n',net_ex.trainParam.mu); fprintf(fid,'regression R= %10.5f\n',R(1,2)); fprintf(fid,'do= \n'); fprintf(fid,'%8.5f %8.5f %8.5f %8.5f %8.5f\n',do); fprintf(fid,'lo= \n'); fprintf(fid,'%8.5f %8.5f %8.5f %8.5f %8.5f\n',lo); fprintf(fid,'kdo= \n'); fprintf(fid,'%8.5f %8.5f %8.5f %8.5f %8.5f\n',kdo); fprintf(fid,'klo= \n'); fprintf(fid,'%8.5f %8.5f %8.5f %8.5f %8.5f\n',klo); fprintf(fid,'po= \n'); fprintf(fid,'%8.5f %8.5f %8.5f %8.5f %8.5f\n',po); fclose(fid); % Cuvanje najbolje mreze savefile='najbolja.mat'; save(savefile,'net_ex') 2 Имплементиран модел кретања function[x,y,teta]=model_kretanja(x,y,teta,dsd,dsl) b=9; ds=(dsd+dsl)/2; dteta=(dsd-dsl)/b; x=x+ds*cos(teta+dteta/2); y=y+ds*sin(teta+dteta/2); teta=teta+dteta; end 45
Предмет: Задатак 4: Слика 1.0
 Лист/листова: 1/1 Задатак 4: Задатак 4.1.1. Слика 1.0 x 1 = x 0 + x x = v x t v x = v cos θ y 1 = y 0 + y y = v y t v y = v sin θ θ 1 = θ 0 + θ θ = ω t θ 1 = θ 0 + ω t x 1 = x 0 + v cos θ t y 1 = y 0 +
Лист/листова: 1/1 Задатак 4: Задатак 4.1.1. Слика 1.0 x 1 = x 0 + x x = v x t v x = v cos θ y 1 = y 0 + y y = v y t v y = v sin θ θ 1 = θ 0 + θ θ = ω t θ 1 = θ 0 + ω t x 1 = x 0 + v cos θ t y 1 = y 0 +
Теорија електричних кола
 др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола i i i Милка Потребић др Милка Потребић, ванредни професор,
др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола i i i Милка Потребић др Милка Потребић, ванредни професор,
налазе се у диелектрику, релативне диелектричне константе ε r = 2, на међусобном растојању 2 a ( a =1cm
 1 Два тачкаста наелектрисања 1 400 p и 100p налазе се у диелектрику релативне диелектричне константе ε на међусобном растојању ( 1cm ) као на слици 1 Одредити силу на наелектрисање 3 100p када се оно нађе:
1 Два тачкаста наелектрисања 1 400 p и 100p налазе се у диелектрику релативне диелектричне константе ε на међусобном растојању ( 1cm ) као на слици 1 Одредити силу на наелектрисање 3 100p када се оно нађе:
предмет МЕХАНИКА 1 Студијски програми ИНДУСТРИЈСКО ИНЖЕЊЕРСТВО ДРУМСКИ САОБРАЋАЈ II ПРЕДАВАЊЕ УСЛОВИ РАВНОТЕЖЕ СИСТЕМА СУЧЕЉНИХ СИЛА
 Висока техничка школа струковних студија у Нишу предмет МЕХАНИКА 1 Студијски програми ИНДУСТРИЈСКО ИНЖЕЊЕРСТВО ДРУМСКИ САОБРАЋАЈ II ПРЕДАВАЊЕ УСЛОВИ РАВНОТЕЖЕ СИСТЕМА СУЧЕЉНИХ СИЛА Садржај предавања: Систем
Висока техничка школа струковних студија у Нишу предмет МЕХАНИКА 1 Студијски програми ИНДУСТРИЈСКО ИНЖЕЊЕРСТВО ДРУМСКИ САОБРАЋАЈ II ПРЕДАВАЊЕ УСЛОВИ РАВНОТЕЖЕ СИСТЕМА СУЧЕЉНИХ СИЛА Садржај предавања: Систем
Универзитет у Београду. Машински факултет. Пројектни задатак. Мастер академске студије 1. година, II семестар. Шк.год. 2010/2011.
 Универзитет у Београду Машински факултет Мастер академске студије 1. година, II семестар Шк.год. 2010/2011. Модул: Дизајн у машинству Пројектни задатак Предмет: Методе одлучивања Предметни наставник: Предметни
Универзитет у Београду Машински факултет Мастер академске студије 1. година, II семестар Шк.год. 2010/2011. Модул: Дизајн у машинству Пројектни задатак Предмет: Методе одлучивања Предметни наставник: Предметни
АТ-5 Вештачке неуронске мреже Проф. др Зоран Миљковић Методе одлучивања 1/35
 АТ-5 Вештачке неуронске мреже Проф. др Зоран Миљковић Методе одлучивања 1/35 Вештачке неуронске мреже Деф: Неуронска мрежа је парадигма вештачке интелигенције која се дефинише као конективни модел за резоновање
АТ-5 Вештачке неуронске мреже Проф. др Зоран Миљковић Методе одлучивања 1/35 Вештачке неуронске мреже Деф: Неуронска мрежа је парадигма вештачке интелигенције која се дефинише као конективни модел за резоновање
СИСТЕМ ЛИНЕАРНИХ ЈЕДНАЧИНА С ДВЕ НЕПОЗНАТЕ
 СИСТЕМ ЛИНЕАРНИХ ЈЕДНАЧИНА С ДВЕ НЕПОЗНАТЕ 8.. Линеарна једначина с две непознате Упознали смо појам линеарног израза са једном непознатом. Изрази x + 4; (x 4) + 5; x; су линеарни изрази. Слично, линеарни
СИСТЕМ ЛИНЕАРНИХ ЈЕДНАЧИНА С ДВЕ НЕПОЗНАТЕ 8.. Линеарна једначина с две непознате Упознали смо појам линеарног израза са једном непознатом. Изрази x + 4; (x 4) + 5; x; су линеарни изрази. Слично, линеарни
2. Наставни колоквијум Задаци за вежбање ОЈЛЕРОВА МЕТОДА
 . колоквијум. Наставни колоквијум Задаци за вежбање У свим задацима се приликом рачунања добија само по једна вредност. Одступање појединачне вредности од тачне вредности је апсолутна грешка. Вредност
. колоквијум. Наставни колоквијум Задаци за вежбање У свим задацима се приликом рачунања добија само по једна вредност. Одступање појединачне вредности од тачне вредности је апсолутна грешка. Вредност
1.2. Сличност троуглова
 математик за VIII разред основне школе.2. Сличност троуглова Учили смо и дефиницију подударности два троугла, као и четири правила (теореме) о подударности троуглова. На сличан начин наводимо (без доказа)
математик за VIII разред основне школе.2. Сличност троуглова Учили смо и дефиницију подударности два троугла, као и четири правила (теореме) о подударности троуглова. На сличан начин наводимо (без доказа)
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА МАТЕМАТИКА ТЕСТ
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА МАТЕМАТИКА ТЕСТ УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА МАТЕМАТИКА ТЕСТ УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
1. Модел кретања (1.1)
") 1. Модел кретања Кинематика, у најопштијој формулацији, може да буде дефинисана као геометрија кретања. Другим речима, применом основног апарата математичке анализе успостављају се зависности између елементарних
1. Модел кретања Кинематика, у најопштијој формулацији, може да буде дефинисана као геометрија кретања. Другим речима, применом основног апарата математичке анализе успостављају се зависности између елементарних
1. Математички доказ закона кретања мобилног робота
 Лист/листова: 1/1 1. Математички доказ закона кретања мобилног робота У нашем случају усвојен је модел кретања робота на основу пређеног пута (одометрија). У овом моделу управљање u(t) је дефинисано пређеним
Лист/листова: 1/1 1. Математички доказ закона кретања мобилног робота У нашем случају усвојен је модел кретања робота на основу пређеног пута (одометрија). У овом моделу управљање u(t) је дефинисано пређеним
г) страница aa и пречник 2RR описаног круга правилног шестоугла јесте рац. бр. јесу самерљиве
 страница aa и пречник 2RR описаног круга правилног шестоугла јесте рац. бр. јесу самерљиве") в) дијагонала dd и страница aa квадрата dd = aa aa dd = aa aa = није рац. бр. нису самерљиве г) страница aa и пречник RR описаног круга правилног шестоугла RR = aa aa RR = aa aa = 1 јесте рац. бр. јесу
в) дијагонала dd и страница aa квадрата dd = aa aa dd = aa aa = није рац. бр. нису самерљиве г) страница aa и пречник RR описаног круга правилног шестоугла RR = aa aa RR = aa aa = 1 јесте рац. бр. јесу
Положај сваке тачке кружне плоче је одређен са поларним координатама r и ϕ.
 VI Савијање кружних плоча Положај сваке тачке кружне плоче је одређен са поларним координатама и ϕ слика 61 Диференцијална једначина савијања кружне плоче је: ( ϕ) 1 1 w 1 w 1 w Z, + + + + ϕ ϕ K Пресечне
VI Савијање кружних плоча Положај сваке тачке кружне плоче је одређен са поларним координатама и ϕ слика 61 Диференцијална једначина савијања кружне плоче је: ( ϕ) 1 1 w 1 w 1 w Z, + + + + ϕ ϕ K Пресечне
7. ЈЕДНОСТАВНИЈЕ КВАДРАТНЕ ДИОФАНТОВE ЈЕДНАЧИНЕ
 7. ЈЕДНОСТАВНИЈЕ КВАДРАТНЕ ДИОФАНТОВE ЈЕДНАЧИНЕ 7.1. ДИОФАНТОВА ЈЕДНАЧИНА ху = n (n N) Диофантова једначина ху = n (n N) има увек решења у скупу природних (а и целих) бројева и њено решавање није проблем,
7. ЈЕДНОСТАВНИЈЕ КВАДРАТНЕ ДИОФАНТОВE ЈЕДНАЧИНЕ 7.1. ДИОФАНТОВА ЈЕДНАЧИНА ху = n (n N) Диофантова једначина ху = n (n N) има увек решења у скупу природних (а и целих) бројева и њено решавање није проблем,
Анализа Петријевих мрежа
 Анализа Петријевих мрежа Анализа Петријевих мрежа Мере се: Својства Петријевих мрежа: Досежљивост (Reachability) Проблем досежљивости се састоји у испитивању да ли се може достићи неко, жељено или нежељено,
Анализа Петријевих мрежа Анализа Петријевих мрежа Мере се: Својства Петријевих мрежа: Досежљивост (Reachability) Проблем досежљивости се састоји у испитивању да ли се може достићи неко, жељено или нежељено,
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 013/014. година ТЕСТ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 013/014. година ТЕСТ
b) Израз за угиб дате плоче, ако се користи само први члан реда усвојеног решења, је:
 Израз за угиб дате плоче, ако се користи само први члан реда усвојеног решења, је:") Пример 1. III Савијање правоугаоних плоча За правоугаону плочу, приказану на слици, одредити: a) израз за угиб, b) вредност угиба и пресечних сила у тачки 1 ако се користи само први члан реда усвојеног
Пример 1. III Савијање правоугаоних плоча За правоугаону плочу, приказану на слици, одредити: a) израз за угиб, b) вредност угиба и пресечних сила у тачки 1 ако се користи само први члан реда усвојеног
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 011/01. година ТЕСТ МАТЕМАТИКА УПУТСТВО
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 011/01. година ТЕСТ МАТЕМАТИКА УПУТСТВО
Теорија електричних кола
 Др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола Милка Потребић Др Милка Потребић, ванредни професор,
Др Милка Потребић, ванредни професор, Теорија електричних кола, вежбе, Универзитет у Београду Електротехнички факултет, 7. Теорија електричних кола Милка Потребић Др Милка Потребић, ванредни професор,
ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ
 ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ предмет: ОСНОВИ МЕХАНИКЕ студијски програм: ЗАШТИТА ЖИВОТНЕ СРЕДИНЕ И ПРОСТОРНО ПЛАНИРАЊЕ ПРЕДАВАЊЕ БРОЈ 2. Садржај предавања: Систем сучељних сила у равни
ВИСОКА ТЕХНИЧКА ШКОЛА СТРУКОВНИХ СТУДИЈА У НИШУ предмет: ОСНОВИ МЕХАНИКЕ студијски програм: ЗАШТИТА ЖИВОТНЕ СРЕДИНЕ И ПРОСТОРНО ПЛАНИРАЊЕ ПРЕДАВАЊЕ БРОЈ 2. Садржај предавања: Систем сучељних сила у равни
θ = rt Sl r КОМПЈУТЕРСКА СИМУЛАЦИЈА И ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА Лист/листова: 1/45 ЗАДАТАК 4 Задатак 4.1.1
 И ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА Лист/листова: 1/45 ЗАДАТАК 4 Задатак 4.1.1 Математички доказ изведен је на основу постављања робота у произвољан положај и одабира произвољне референтне тачке кретања из које се
И ВЕШТАЧКА ИНТЕЛИГЕНЦИЈА Лист/листова: 1/45 ЗАДАТАК 4 Задатак 4.1.1 Математички доказ изведен је на основу постављања робота у произвољан положај и одабира произвољне референтне тачке кретања из које се
ОБЛАСТИ: 1) Тачка 2) Права 3) Криве другог реда
 Тачка 2) Права 3) Криве другог реда") ОБЛАСТИ: ) Тачка ) Права Jov@soft - Март 0. ) Тачка Тачка је дефинисана (одређена) у Декартовом координатном систему са своје две коодринате. Примери: М(5, ) или М(-, 7) или М(,; -5) Jov@soft - Март 0.
ОБЛАСТИ: ) Тачка ) Права Jov@soft - Март 0. ) Тачка Тачка је дефинисана (одређена) у Декартовом координатном систему са своје две коодринате. Примери: М(5, ) или М(-, 7) или М(,; -5) Jov@soft - Март 0.
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 01/01. година ТЕСТ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 01/01. година ТЕСТ
САДРЖАЈ ЗАДАТАК 1...
 Лист/листова: 1/1 САДРЖАЈ ЗАДАТАК 1... 1.1.1. Математички доказ закона кретања мобилног робота 1.1.2. Кретање робота по трајекторији... Транслаторно кретање... Кретање по трајекторији ромбоидног облика...
Лист/листова: 1/1 САДРЖАЈ ЗАДАТАК 1... 1.1.1. Математички доказ закона кретања мобилног робота 1.1.2. Кретање робота по трајекторији... Транслаторно кретање... Кретање по трајекторији ромбоидног облика...
8.2 ЛАБОРАТОРИЈСКА ВЕЖБА 2 Задатак вежбе: Израчунавање фактора појачања мотора напонским управљањем у отвореној повратној спрези
 Регулциј електромоторних погон 8 ЛАБОРАТОРИЈСКА ВЕЖБА Здтк вежбе: Изрчунвње фктор појчњ мотор нпонским упрвљњем у отвореној повртној спрези Увод Преносн функциј мотор којим се нпонски упрвљ Кд се з нулте
Регулциј електромоторних погон 8 ЛАБОРАТОРИЈСКА ВЕЖБА Здтк вежбе: Изрчунвње фктор појчњ мотор нпонским упрвљњем у отвореној повртној спрези Увод Преносн функциј мотор којим се нпонски упрвљ Кд се з нулте
КРУГ. У свом делу Мерење круга, Архимед је први у историји математике одрeдио приближну вред ност броја π а тиме и дужину кружнице.
 КРУГ У свом делу Мерење круга, Архимед је први у историји математике одрeдио приближну вред ност броја π а тиме и дужину кружнице. Архимед (287-212 г.п.н.е.) 6.1. Централни и периферијски угао круга Круг
КРУГ У свом делу Мерење круга, Архимед је први у историји математике одрeдио приближну вред ност броја π а тиме и дужину кружнице. Архимед (287-212 г.п.н.е.) 6.1. Централни и периферијски угао круга Круг
6.2. Симетрала дужи. Примена
 6.2. Симетрала дужи. Примена Дата је дуж АВ (слика 22). Тачка О је средиште дужи АВ, а права је нормална на праву АВ(p) и садржи тачку О. p Слика 22. Права назива се симетрала дужи. Симетрала дужи је права
6.2. Симетрала дужи. Примена Дата је дуж АВ (слика 22). Тачка О је средиште дужи АВ, а права је нормална на праву АВ(p) и садржи тачку О. p Слика 22. Права назива се симетрала дужи. Симетрала дужи је права
Упутство за избор домаћих задатака
 Упутство за избор домаћих задатака Студент од изабраних задатака области Математике 2: Комбинаторика, Вероватноћа и статистика бира по 20 задатака. Студент може бирати задатке помоћу програмског пакета
Упутство за избор домаћих задатака Студент од изабраних задатака области Математике 2: Комбинаторика, Вероватноћа и статистика бира по 20 задатака. Студент може бирати задатке помоћу програмског пакета
Tестирање хипотеза. 5.час. 30. март Боjана Тодић Статистички софтвер март / 10
 Tестирање хипотеза 5.час 30. март 2016. Боjана Тодић Статистички софтвер 2 30. март 2016. 1 / 10 Монте Карло тест Монте Карло методе су методе код коjих се употребљаваjу низови случаjних броjева за извршење
Tестирање хипотеза 5.час 30. март 2016. Боjана Тодић Статистички софтвер 2 30. март 2016. 1 / 10 Монте Карло тест Монте Карло методе су методе код коjих се употребљаваjу низови случаjних броjева за извршење
Вектори vs. скалари. Векторске величине се описују интензитетом и правцем. Примери: Померај, брзина, убрзање, сила.
 Вектори 1 Вектори vs. скалари Векторске величине се описују интензитетом и правцем Примери: Померај, брзина, убрзање, сила. Скаларне величине су комплетно описане само интензитетом Примери: Температура,
Вектори 1 Вектори vs. скалари Векторске величине се описују интензитетом и правцем Примери: Померај, брзина, убрзање, сила. Скаларне величине су комплетно описане само интензитетом Примери: Температура,
Писмени испит из Метода коначних елемената
 Београд,.0.07.. За приказани билинеарни коначни елемент (Q8) одредити вектор чворног оптерећења услед задатог линијског оптерећења p. Користити природни координатни систем (ξ,η).. На слици је приказан
Београд,.0.07.. За приказани билинеарни коначни елемент (Q8) одредити вектор чворног оптерећења услед задатог линијског оптерећења p. Користити природни координатни систем (ξ,η).. На слици је приказан
Универзитет у Београду, Саобраћајни факултет Предмет: Паркирање. 1. вежба
 Универзитет у Београду, Саобраћајни факултет Предмет: Паркирање ОРГАНИЗАЦИЈА ПАРКИРАЛИШТА 1. вежба Место за паркирање (паркинг место) Део простора намењен, технички опремљен и уређен за паркирање једног
Универзитет у Београду, Саобраћајни факултет Предмет: Паркирање ОРГАНИЗАЦИЈА ПАРКИРАЛИШТА 1. вежба Место за паркирање (паркинг место) Део простора намењен, технички опремљен и уређен за паркирање једног
Задатак Задатак Задатак Задатак Задатак Списак слика Литература... 86
 Лист/листова: 1/86 Садржај Задатак 1.1.1... 3 Задатак 1.1.2... 5 Задатак 1.2.1... 6 Задатак 2.1... 70 Задатак 2.2... 75 Списак слика... 83 Литература... 86 4 468/09 495/09 28/08 18/09 69/09 20/11. 1.6.21
Лист/листова: 1/86 Садржај Задатак 1.1.1... 3 Задатак 1.1.2... 5 Задатак 1.2.1... 6 Задатак 2.1... 70 Задатак 2.2... 75 Списак слика... 83 Литература... 86 4 468/09 495/09 28/08 18/09 69/09 20/11. 1.6.21
Когнитивне способности мобилних робота у домену унутрашњег транспорта материјала
 ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-5 Когнитивна роботика: Аутономни мобилни роботи когнитивне способности мобилних робота Когнитивне способности мобилних робота у домену унутрашњег транспорта материјала
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-5 Когнитивна роботика: Аутономни мобилни роботи когнитивне способности мобилних робота Когнитивне способности мобилних робота у домену унутрашњег транспорта материјала
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 014/01. година ТЕСТ МАТЕМАТИКА
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 014/01. година ТЕСТ МАТЕМАТИКА
Факултет организационих наука Центар за пословно одлучивање. PROMETHEE (Preference Ranking Organization Method for Enrichment Evaluation)
") Факултет организационих наука Центар за пословно одлучивање PROMETHEE (Preference Ranking Organization Method for Enrichment Evaluation) Студија случаја D-Sight Консултантске услуге за Изградња брзе пруге
Факултет организационих наука Центар за пословно одлучивање PROMETHEE (Preference Ranking Organization Method for Enrichment Evaluation) Студија случаја D-Sight Консултантске услуге за Изградња брзе пруге
2.3. Решавање линеарних једначина с једном непознатом
 . Решимо једначину 5. ( * ) + 5 + Провера: + 5 + 0 5 + 5 +. + 0. Број је решење дате једначине... Реши једначину: ) +,5 ) + ) - ) - -.. Да ли су следеће једначине еквивалентне? Провери решавањем. ) - 0
. Решимо једначину 5. ( * ) + 5 + Провера: + 5 + 0 5 + 5 +. + 0. Број је решење дате једначине... Реши једначину: ) +,5 ) + ) - ) - -.. Да ли су следеће једначине еквивалентне? Провери решавањем. ) - 0
Први корак у дефинисању случајне променљиве је. дефинисање и исписивање свих могућих eлементарних догађаја.
 СЛУЧАЈНА ПРОМЕНЉИВА Једнодимензионална случајна променљива X је пресликавање у коме се сваки елементарни догађај из простора елементарних догађаја S пресликава у вредност са бројне праве Први корак у дефинисању
СЛУЧАЈНА ПРОМЕНЉИВА Једнодимензионална случајна променљива X је пресликавање у коме се сваки елементарни догађај из простора елементарних догађаја S пресликава у вредност са бројне праве Први корак у дефинисању
5.2. Имплицитни облик линеарне функције
 математикa за VIII разред основне школе 0 Слика 6 8. Нацртај график функције: ) =- ; ) =,5; 3) = 0. 9. Нацртај график функције и испитај њен знак: ) = - ; ) = 0,5 + ; 3) =-- ; ) = + 0,75; 5) = 0,5 +. 0.
математикa за VIII разред основне школе 0 Слика 6 8. Нацртај график функције: ) =- ; ) =,5; 3) = 0. 9. Нацртај график функције и испитај њен знак: ) = - ; ) = 0,5 + ; 3) =-- ; ) = + 0,75; 5) = 0,5 +. 0.
2. EЛЕМЕНТАРНЕ ДИОФАНТОВЕ ЈЕДНАЧИНЕ
 2. EЛЕМЕНТАРНЕ ДИОФАНТОВЕ ЈЕДНАЧИНЕ 2.1. МАТЕМАТИЧКИ РЕБУСИ Најједноставније Диофантове једначине су математички ребуси. Метод разликовања случајева код ових проблема се показује плодоносним, јер је раздвајање
2. EЛЕМЕНТАРНЕ ДИОФАНТОВЕ ЈЕДНАЧИНЕ 2.1. МАТЕМАТИЧКИ РЕБУСИ Најједноставније Диофантове једначине су математички ребуси. Метод разликовања случајева код ових проблема се показује плодоносним, јер је раздвајање
Факултет организационих наука Центар за пословно одлучивање. Откривање законитости у подацима Вештачке неуронске мреже
 Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Тест Математика Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 00/0. година ТЕСТ МАТЕМАТИКА
Тест Математика Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 00/0. година ТЕСТ МАТЕМАТИКА
Факултет организационих наука Центар за пословно одлучивање. Откривање законитости у подацима 3 Вештачке неуронске мреже
 Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима 3 Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
Факултет организационих наука Центар за пословно одлучивање Откривање законитости у подацима 3 Вештачке неуронске мреже 1 П7: ВНМ О ВНМ Архитектуре ВНМ ВНМ апликације 2 EXPERT GDSS EXPERT SUPPORT? Модел
Аксиоме припадања. Никола Томовић 152/2011
 Аксиоме припадања Никола Томовић 152/2011 Павле Васић 104/2011 1 Шта је тачка? Шта је права? Шта је раван? Да бисмо се бавили геометријом (и не само геометријом), морамо увести основне појмове и полазна
Аксиоме припадања Никола Томовић 152/2011 Павле Васић 104/2011 1 Шта је тачка? Шта је права? Шта је раван? Да бисмо се бавили геометријом (и не само геометријом), морамо увести основне појмове и полазна
МАТРИЧНА АНАЛИЗА КОНСТРУКЦИЈА
 Београд, 21.06.2014. За штап приказан на слици одредити најмању вредност критичног оптерећења P cr користећи приближан поступак линеаризоване теорије другог реда и: а) и један елемент, слика 1, б) два
Београд, 21.06.2014. За штап приказан на слици одредити најмању вредност критичног оптерећења P cr користећи приближан поступак линеаризоване теорије другог реда и: а) и један елемент, слика 1, б) два
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ПРОБНИ ЗАВРШНИ ИСПИТ школска 016/017. година ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ПРЕГЛЕДАЊЕ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ПРОБНИ ЗАВРШНИ ИСПИТ школска 016/017. година ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ПРЕГЛЕДАЊЕ
РЕШЕЊА ЗАДАТАКА - IV РАЗЕД 1. Мањи број: : x,
 РЕШЕЊА ЗАДАТАКА - IV РАЗЕД 1. Мањи број: : x, Већи број: 1 : 4x + 1, (4 бода) Њихов збир: 1 : 5x + 1, Збир умањен за остатак: : 5x = 55, 55 : 5 = 11; 11 4 = ; + 1 = 45; : x = 11. Дакле, први број је 45
РЕШЕЊА ЗАДАТАКА - IV РАЗЕД 1. Мањи број: : x, Већи број: 1 : 4x + 1, (4 бода) Њихов збир: 1 : 5x + 1, Збир умањен за остатак: : 5x = 55, 55 : 5 = 11; 11 4 = ; + 1 = 45; : x = 11. Дакле, први број је 45
3.1. Однос тачке и праве, тачке и равни. Одређеност праве и равни
 ТАЧКА. ПРАВА. РАВАН Талес из Милета (624 548. пре н. е.) Еуклид (330 275. пре н. е.) Хилберт Давид (1862 1943) 3.1. Однос тачке и праве, тачке и равни. Одређеност праве и равни Настанак геометрије повезује
ТАЧКА. ПРАВА. РАВАН Талес из Милета (624 548. пре н. е.) Еуклид (330 275. пре н. е.) Хилберт Давид (1862 1943) 3.1. Однос тачке и праве, тачке и равни. Одређеност праве и равни Настанак геометрије повезује
Универзитет у Београду Машински факултет
 Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
Школска 2010/2011 ДОКТОРСКЕ АКАДЕМСКЕ СТУДИЈЕ
 Школска 2010/2011 ДОКТОРСКЕ АКАДЕМСКЕ СТУДИЈЕ Прва година ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА Г1: ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА 10 ЕСПБ бодова. Недељно има 20 часова
Школска 2010/2011 ДОКТОРСКЕ АКАДЕМСКЕ СТУДИЈЕ Прва година ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА Г1: ИНФОРМАТИЧКЕ МЕТОДЕ У БИОМЕДИЦИНСКИМ ИСТРАЖИВАЊИМА 10 ЕСПБ бодова. Недељно има 20 часова
1. 2. МЕТОД РАЗЛИКОВАЊА СЛУЧАЈЕВА 1
 1. 2. МЕТОД РАЗЛИКОВАЊА СЛУЧАЈЕВА 1 Метод разликовања случајева је један од најексплоатисанијих метода за решавање математичких проблема. У теорији Диофантових једначина он није свемогућ, али је сигурно
1. 2. МЕТОД РАЗЛИКОВАЊА СЛУЧАЈЕВА 1 Метод разликовања случајева је један од најексплоатисанијих метода за решавање математичких проблема. У теорији Диофантових једначина он није свемогућ, али је сигурно
Хомогена диференцијална једначина је она која може да се напише у облику: = t( x)
") ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ Штa треба знати пре почетка решавања задатака? Врсте диференцијалних једначина. ДИФЕРЕНЦИЈАЛНА ЈЕДНАЧИНА КОЈА РАЗДВАЈА ПРОМЕНЉИВЕ Код ове методе поступак је следећи: раздвојити
ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ Штa треба знати пре почетка решавања задатака? Врсте диференцијалних једначина. ДИФЕРЕНЦИЈАЛНА ЈЕДНАЧИНА КОЈА РАЗДВАЈА ПРОМЕНЉИВЕ Код ове методе поступак је следећи: раздвојити
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ОЦЕЊИВАЊЕ ОБАВЕЗНО ПРОЧИТАТИ ОПШТА УПУТСТВА 1. Сваки
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2010/2011. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2010/2011. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
ТРАПЕЗ РЕГИОНАЛНИ ЦЕНТАР ИЗ ПРИРОДНИХ И ТЕХНИЧКИХ НАУКА У ВРАЊУ. Аутор :Петар Спасић, ученик 8. разреда ОШ 8. Октобар, Власотинце
 РЕГИОНАЛНИ ЦЕНТАР ИЗ ПРИРОДНИХ И ТЕХНИЧКИХ НАУКА У ВРАЊУ ТРАПЕЗ Аутор :Петар Спасић, ученик 8. разреда ОШ 8. Октобар, Власотинце Ментор :Криста Ђокић, наставник математике Власотинце, 2011. године Трапез
РЕГИОНАЛНИ ЦЕНТАР ИЗ ПРИРОДНИХ И ТЕХНИЧКИХ НАУКА У ВРАЊУ ТРАПЕЗ Аутор :Петар Спасић, ученик 8. разреда ОШ 8. Октобар, Власотинце Ментор :Криста Ђокић, наставник математике Власотинце, 2011. године Трапез
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2011/2012. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ И НАУКЕ ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ НА КРАЈУ ОСНОВНОГ ОБРАЗОВАЊА И ВАСПИТАЊА школска 2011/2012. година ТЕСТ 3 МАТЕМАТИКА УПУТСТВО
TAЧКАСТА НАЕЛЕКТРИСАЊА
 TЧКАСТА НАЕЛЕКТРИСАЊА Два тачкаста наелектрисања оптерећена количинама електрицитета и налазе се у вакууму као што је приказано на слици Одредити: а) Вектор јачине електростатичког поља у тачки А; б) Електрични
TЧКАСТА НАЕЛЕКТРИСАЊА Два тачкаста наелектрисања оптерећена количинама електрицитета и налазе се у вакууму као што је приказано на слици Одредити: а) Вектор јачине електростатичког поља у тачки А; б) Електрични
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 0/06. година ТЕСТ МАТЕМАТИКА
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ЗАВРШНИ ИСПИТ У ОСНОВНОМ ОБРАЗОВАЊУ И ВАСПИТАЊУ школска 0/06. година ТЕСТ МАТЕМАТИКА
ЛИНЕАРНА ФУНКЦИЈА. k, k 0), осна и централна симетрија и сл. 2, x 0. У претходном примеру неке функције су линеарне а неке то нису.
, осна и централна симетрија и сл. 2, x 0. У претходном примеру неке функције су линеарне а неке то нису.") ЛИНЕАРНА ФУНКЦИЈА 5.. Функција = a + b Функционалне зависности су веома значајне и са њиховим применама често се сусрећемо. Тако, већ су нам познате директна и обрнута пропорционалност ( = k; = k, k ),
ЛИНЕАРНА ФУНКЦИЈА 5.. Функција = a + b Функционалне зависности су веома значајне и са њиховим применама често се сусрећемо. Тако, већ су нам познате директна и обрнута пропорционалност ( = k; = k, k ),
Количина топлоте и топлотна равнотежа
 Количина топлоте и топлотна равнотежа Топлота и количина топлоте Топлота је један од видова енергије тела. Енергија коју тело прими или отпушта у топлотним процесима назива се количина топлоте. Количина
Количина топлоте и топлотна равнотежа Топлота и количина топлоте Топлота је један од видова енергије тела. Енергија коју тело прими или отпушта у топлотним процесима назива се количина топлоте. Количина
АНАЛОГНА ЕЛЕКТРОНИКА ЛАБОРАТОРИЈСКЕ ВЕЖБЕ
 ЕЛЕКТРОТЕХНИЧКИ ФАКУЛТЕТ У БЕОГРАДУ КАТЕДРА ЗА ЕЛЕКТРОНИКУ АНАЛОГНА ЕЛЕКТРОНИКА ЛАБОРАТОРИЈСКЕ ВЕЖБЕ ВЕЖБА БРОЈ 2 ПОЈАЧАВАЧ СНАГЕ У КЛАСИ Б 1. 2. ИМЕ И ПРЕЗИМЕ БР. ИНДЕКСА ГРУПА ОЦЕНА ДАТУМ ВРЕМЕ ДЕЖУРНИ
ЕЛЕКТРОТЕХНИЧКИ ФАКУЛТЕТ У БЕОГРАДУ КАТЕДРА ЗА ЕЛЕКТРОНИКУ АНАЛОГНА ЕЛЕКТРОНИКА ЛАБОРАТОРИЈСКЕ ВЕЖБЕ ВЕЖБА БРОЈ 2 ПОЈАЧАВАЧ СНАГЕ У КЛАСИ Б 1. 2. ИМЕ И ПРЕЗИМЕ БР. ИНДЕКСА ГРУПА ОЦЕНА ДАТУМ ВРЕМЕ ДЕЖУРНИ
8.5 ЛАБОРАТОРИЈСКА ВЕЖБА 5 Задатак вежбе: PI регулација брзине напонски управљаним микромотором једносмерне струје
 Регулација електромоторних погона 8.5 ЛАБОРАТОРИЈСКА ВЕЖБА 5 Задатак вежбе: регулација брзине напонски управљаним микромотором једносмерне струје Увод Simulik модел На основу упрошћеног блок дијаграма
Регулација електромоторних погона 8.5 ЛАБОРАТОРИЈСКА ВЕЖБА 5 Задатак вежбе: регулација брзине напонски управљаним микромотором једносмерне струје Увод Simulik модел На основу упрошћеног блок дијаграма
Емпиријскo управљање интелигентног мобилног робота на бази машинског учења демонстрацијом и хомографије добијене од некалибрисане камере
 ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Емпиријскo управљање интелигентног мобилног робота на бази машинског учења демонстрацијом и хомографије добијене од некалибрисане камере Марко Митић 1, Зоран Миљковић
ТЕХНИЧКО РЕШЕЊЕ: Нова метода (М 85) Емпиријскo управљање интелигентног мобилног робота на бази машинског учења демонстрацијом и хомографије добијене од некалибрисане камере Марко Митић 1, Зоран Миљковић
6.5 Површина круга и његових делова
 7. Тетива је једнака полупречнику круга. Израчунај дужину мањег одговарајућег лука ако је полупречник 2,5 сm. 8. Географска ширина Београда је α = 44 47'57", а полупречник Земље 6 370 km. Израчунај удаљеност
7. Тетива је једнака полупречнику круга. Израчунај дужину мањег одговарајућег лука ако је полупречник 2,5 сm. 8. Географска ширина Београда је α = 44 47'57", а полупречник Земље 6 370 km. Израчунај удаљеност
Семинарски рад из линеарне алгебре
 Универзитет у Београду Машински факултет Докторске студије Милош Живановић дипл. инж. Семинарски рад из линеарне алгебре Београд, 6 Линеарна алгебра семинарски рад Дата је матрица: Задатак: a) Одредити
Универзитет у Београду Машински факултет Докторске студије Милош Живановић дипл. инж. Семинарски рад из линеарне алгебре Београд, 6 Линеарна алгебра семинарски рад Дата је матрица: Задатак: a) Одредити
6. ЛИНЕАРНА ДИОФАНТОВА ЈЕДНАЧИНА ах + by = c
 6. ЛИНЕАРНА ДИОФАНТОВА ЈЕДНАЧИНА ах + by = c Ако су а, b и с цели бројеви и аb 0, онда се линеарна једначина ах + bу = с, при чему су х и у цели бројеви, назива линеарна Диофантова једначина. Очигледно
6. ЛИНЕАРНА ДИОФАНТОВА ЈЕДНАЧИНА ах + by = c Ако су а, b и с цели бројеви и аb 0, онда се линеарна једначина ах + bу = с, при чему су х и у цели бројеви, назива линеарна Диофантова једначина. Очигледно
Универзитет у Београду Машински факултет
 Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
Универзитет у Београду Машински факултет Дипломске академске студије МОДУЛ ЗА ПРОИЗВОДНО МАШИНСТВО ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ П Р О Ј Е К А Т Оцена проjeктног задатка: Потпис наставника: Предметни
Универзитет у Крагујевцу Факултет за машинство и грађевинарство у Краљеву Катедра за основне машинске конструкције и технологије материјала
 Теоријски део: Вежба број ТЕРМИЈСКА AНАЛИЗА. Термијска анализа је поступак који је 903.год. увео G. Tamman за добијање криве хлађења(загревања). Овај поступак заснива се на принципу промене топлотног садржаја
Теоријски део: Вежба број ТЕРМИЈСКА AНАЛИЗА. Термијска анализа је поступак који је 903.год. увео G. Tamman за добијање криве хлађења(загревања). Овај поступак заснива се на принципу промене топлотног садржаја
4. ЗАКОН ВЕЛИКИХ БРОЈЕВА
 4. Закон великих бројева 4. ЗАКОН ВЕЛИКИХ БРОЈЕВА Аксиоматска дефиниција вероватноће не одређује начин на који ће вероватноће случајних догађаја бити одређене у неком реалном експерименту. Зато треба наћи
4. Закон великих бројева 4. ЗАКОН ВЕЛИКИХ БРОЈЕВА Аксиоматска дефиниција вероватноће не одређује начин на који ће вероватноће случајних догађаја бити одређене у неком реалном експерименту. Зато треба наћи
ЕНЕРГЕТСКИ ПРЕТВАРАЧИ 2 (13Е013ЕП2) октобар 2016.
 октобар 2016.") ЕНЕРГЕТСКИ ПРЕТВАРАЧИ (3Е03ЕП) октобар 06.. Батерија напона B = 00 пуни се преко трофазног полууправљивог мосног исправљача, који је повезан на мрежу 3x380, 50 Hz преко трансформатора у спрези y, са преносним
ЕНЕРГЕТСКИ ПРЕТВАРАЧИ (3Е03ЕП) октобар 06.. Батерија напона B = 00 пуни се преко трофазног полууправљивог мосног исправљача, који је повезан на мрежу 3x380, 50 Hz преко трансформатора у спрези y, са преносним
Ротационо симетрична деформација средње површи ротационе љуске
 Ротационо симетрична деформација средње површи ротационе љуске слика. У свакој тачки посматране средње површи, у општем случају, постоје два компонентална померања: v - померање у правцу тангенте на меридијалну
Ротационо симетрична деформација средње површи ротационе љуске слика. У свакој тачки посматране средње површи, у општем случају, постоје два компонентална померања: v - померање у правцу тангенте на меридијалну
ЗАШТИТА ПОДАТАКА Шифровање јавним кључем и хеш функције. Diffie-Hellman размена кључева
 ЗАШТИТА ПОДАТАКА Шифровање јавним кључем и хеш функције Diffie-Hellman размена кључева Преглед Биће објашњено: Diffie-Hellman размена кључева 2/13 Diffie-Hellman размена кључева први алгоритам са јавним
ЗАШТИТА ПОДАТАКА Шифровање јавним кључем и хеш функције Diffie-Hellman размена кључева Преглед Биће објашњено: Diffie-Hellman размена кључева 2/13 Diffie-Hellman размена кључева први алгоритам са јавним
ЛАБОРАТОРИЈСКЕ ВЕЖБЕ ИЗ ФИЗИКЕ ПРВИ КОЛОКВИЈУМ I група
 ЛАБОРАТОРИЈСКЕ ВЕЖБЕ ИЗ ФИЗИКЕ ПРВИ КОЛОКВИЈУМ 21.11.2009. I група Име и презиме студента: Број индекса: Термин у ком студент ради вежбе: Напомена: Бира се и одговара ИСКЉУЧИВО на шест питања заокруживањем
ЛАБОРАТОРИЈСКЕ ВЕЖБЕ ИЗ ФИЗИКЕ ПРВИ КОЛОКВИЈУМ 21.11.2009. I група Име и презиме студента: Број индекса: Термин у ком студент ради вежбе: Напомена: Бира се и одговара ИСКЉУЧИВО на шест питања заокруживањем
I Линеарне једначине. II Линеарне неједначине. III Квадратна једначина и неједначина АЛГЕБАРСКЕ ЈЕДНАЧИНЕ И НЕЈЕДНАЧИНЕ
 Штa треба знати пре почетка решавања задатака? АЛГЕБАРСКЕ ЈЕДНАЧИНЕ И НЕЈЕДНАЧИНЕ I Линеарне једначине Линеарне једначине се решавају по следећем шаблону: Ослободимо се разломка Ослободимо се заграде Познате
Штa треба знати пре почетка решавања задатака? АЛГЕБАРСКЕ ЈЕДНАЧИНЕ И НЕЈЕДНАЧИНЕ I Линеарне једначине Линеарне једначине се решавају по следећем шаблону: Ослободимо се разломка Ослободимо се заграде Познате
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-1 Хибридни интелигентни технолошки системи
 ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-1 Хибридни интелигентни технолошки системи ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ Дефиниција Интелигентни технолошки систем* ) (ИТС) је највиша класа флексибилних технолошких
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-1 Хибридни интелигентни технолошки системи ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ Дефиниција Интелигентни технолошки систем* ) (ИТС) је највиша класа флексибилних технолошких
I Тачка 1. Растојање две тачке: 2. Средина дужи y ( ) ( ) 2. II Права 1. Једначина прамена правих 2. Једначина праве кроз две тачке ( )
 ( ) 2. II Права 1. Једначина прамена правих 2. Једначина праве кроз две тачке ( )") Шт треба знати пре почетка решавања задатака? АНАЛИТИЧКА ГЕОМЕТРИЈА У РАВНИ I Тачка. Растојање две тачке:. Средина дужи + ( ) ( ) + S + S и. Деоба дужи у односу λ: 4. Површина троугла + λ + λ C + λ и P
Шт треба знати пре почетка решавања задатака? АНАЛИТИЧКА ГЕОМЕТРИЈА У РАВНИ I Тачка. Растојање две тачке:. Средина дужи + ( ) ( ) + S + S и. Деоба дужи у односу λ: 4. Површина троугла + λ + λ C + λ и P
Математика Тест 3 Кључ за оцењивање
 Математика Тест 3 Кључ за оцењивање ОПШТЕ УПУТСТВО ЗА ОЦЕЊИВАЊЕ Кључ за оцењивање дефинише начин на који се оцењује сваки поједини задатак. У општим упутствима за оцењивање дефинисане су оне ситуације
Математика Тест 3 Кључ за оцењивање ОПШТЕ УПУТСТВО ЗА ОЦЕЊИВАЊЕ Кључ за оцењивање дефинише начин на који се оцењује сваки поједини задатак. У општим упутствима за оцењивање дефинисане су оне ситуације
Скупови (наставак) Релације. Професор : Рака Јовановић Асиситент : Јелена Јовановић
 Релације. Професор : Рака Јовановић Асиситент : Јелена Јовановић") Скупови (наставак) Релације Професор : Рака Јовановић Асиситент : Јелена Јовановић Дефиниција дуалне скуповне формуле За скуповне формулу f, која се састоји из једног или више скуповних симбола и њихових
Скупови (наставак) Релације Професор : Рака Јовановић Асиситент : Јелена Јовановић Дефиниција дуалне скуповне формуле За скуповне формулу f, која се састоји из једног или више скуповних симбола и њихових
Cook-Levin: SAT је NP-комплетан. Теодор Најдан Трифунов 305M/12
 Cook-Levin: SAT је NP-комплетан Теодор Најдан Трифунов 305M/12 1 Основни појмови Недетерминистичка Тјурингова машина (НТМ) је уређена седморка M = (Q, Σ, Γ, δ, q 0,, ) Q коначан скуп стања контролног механизма
Cook-Levin: SAT је NP-комплетан Теодор Најдан Трифунов 305M/12 1 Основни појмови Недетерминистичка Тјурингова машина (НТМ) је уређена седморка M = (Q, Σ, Γ, δ, q 0,, ) Q коначан скуп стања контролног механизма
Стручни рад ПРИМЕНА МЕТОДЕ АНАЛИТИЧКИХ ХИЕРАРХИJСКИХ ПРОЦЕСА (АХП) КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ
 КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ") ПОДЗЕМНИ РАДОВИ 15 (2006) 43-48 UDK 62 РУДАРСКО-ГЕОЛОШКИ ФАКУЛТЕТ БЕОГРАД YU ISSN 03542904 Стручни рад ПРИМЕНА МЕТОДЕ АНАЛИТИЧКИХ ХИЕРАРХИJСКИХ ПРОЦЕСА (АХП) КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ ИЗВОД
ПОДЗЕМНИ РАДОВИ 15 (2006) 43-48 UDK 62 РУДАРСКО-ГЕОЛОШКИ ФАКУЛТЕТ БЕОГРАД YU ISSN 03542904 Стручни рад ПРИМЕНА МЕТОДЕ АНАЛИТИЧКИХ ХИЕРАРХИJСКИХ ПРОЦЕСА (АХП) КОД ИЗБОРА УТОВАРНО -ТРАНСПОРТНЕ МАШИНЕ ИЗВОД
& 2. Брзина. (слика 3). Током кратког временског интервала Δt тачка пређе пут Δs и изврши елементарни (бесконачно мали) померај Δ r
. Током кратког временског интервала Δt тачка пређе пут Δs и изврши елементарни (бесконачно мали) померај Δ r") &. Брзина Да би се окарактерисало кретање материјалне тачке уводи се векторска величина брзина, коју одређује како интензитет кретања тако и његов правац и смер у датом моменту времена. Претпоставимо да
&. Брзина Да би се окарактерисало кретање материјалне тачке уводи се векторска величина брзина, коју одређује како интензитет кретања тако и његов правац и смер у датом моменту времена. Претпоставимо да
Математички модел осциловања система кугли око равнотежног положаја под утицајем гравитационог поља
 Универзитет у Машински факултет Београду Математички модел осциловања система кугли око равнотежног положаја под утицајем гравитационог поља -семинарски рад- ментор: Александар Томић Милош Живановић 65/
Универзитет у Машински факултет Београду Математички модел осциловања система кугли око равнотежног положаја под утицајем гравитационог поља -семинарски рад- ментор: Александар Томић Милош Живановић 65/
10.3. Запремина праве купе
 0. Развијени омотач купе је исечак чији је централни угао 60, а тетива која одговара том углу је t. Изрази површину омотача те купе у функцији од t. 0.. Запремина праве купе. Израчунај запремину ваљка
0. Развијени омотач купе је исечак чији је централни угао 60, а тетива која одговара том углу је t. Изрази површину омотача те купе у функцији од t. 0.. Запремина праве купе. Израчунај запремину ваљка
6.1. Осна симетрија у равни. Симетричност двеју фигура у односу на праву. Осна симетрија фигуре
 0 6.. Осна симетрија у равни. Симетричност двеју фигура у односу на праву. Осна симетрија фигуре У обичном говору се често каже да су неки предмети симетрични. Примери таквих објеката, предмета, геометријских
0 6.. Осна симетрија у равни. Симетричност двеју фигура у односу на праву. Осна симетрија фигуре У обичном говору се често каже да су неки предмети симетрични. Примери таквих објеката, предмета, геометријских
8. ПИТАГОРИНА ЈЕДНАЧИНА х 2 + у 2 = z 2
 8. ПИТАГОРИНА ЈЕДНАЧИНА х + у = z Један од најзанимљивијих проблема теорије бројева свакако је проблем Питагориних бројева, тј. питање решења Питагорине Диофантове једначине. Питагориним бројевима или
8. ПИТАГОРИНА ЈЕДНАЧИНА х + у = z Један од најзанимљивијих проблема теорије бројева свакако је проблем Питагориних бројева, тј. питање решења Питагорине Диофантове једначине. Питагориним бројевима или
Основе теорије вероватноће
 . Прилог А Основе теорије вероватноће Основни појмови теорије вероватноће су експеримент и исходи резултати. Најпознатији пример којим се уводе појмови и концепти теорије вероватноће је бацање новчића
. Прилог А Основе теорије вероватноће Основни појмови теорије вероватноће су експеримент и исходи резултати. Најпознатији пример којим се уводе појмови и концепти теорије вероватноће је бацање новчића
Једна од централних идеја рачунарства Метода која решавање проблема своди на решавање проблема мање димензије
 Рекурзија Једна од централних идеја рачунарства Метода која решавање проблема своди на решавање проблема мање димензије Рекурзивна функција (неформално) је функција која у својој дефиницији има позив те
Рекурзија Једна од централних идеја рачунарства Метода која решавање проблема своди на решавање проблема мање димензије Рекурзивна функција (неформално) је функција која у својој дефиницији има позив те
7.3. Површина правилне пирамиде. Површина правилне четворостране пирамиде
 математик за VIII разред основне школе 4. Прво наћи дужину апотеме. Како је = 17 cm то је тражена површина P = 18+ 4^cm = ^4+ cm. 14. Основа четворостране пирамиде је ромб чије су дијагонале d 1 = 16 cm,
математик за VIII разред основне школе 4. Прво наћи дужину апотеме. Како је = 17 cm то је тражена површина P = 18+ 4^cm = ^4+ cm. 14. Основа четворостране пирамиде је ромб чије су дијагонале d 1 = 16 cm,
Осцилације система са једним степеном слободе кретања
 03-ec-18 Осцилације система са једним степеном слободе кретања Опруга Принудна сила F(t) Вискозни пригушивач ( дампер ) 1 Принудна (пертурбациона) сила опруга Реституциона сила (сила еластичног отпора)
03-ec-18 Осцилације система са једним степеном слободе кретања Опруга Принудна сила F(t) Вискозни пригушивач ( дампер ) 1 Принудна (пертурбациона) сила опруга Реституциона сила (сила еластичног отпора)
РЈЕШЕЊА ЗАДАТАКА СА ТАКМИЧЕЊА ИЗ ЕЛЕКТРИЧНИХ МАШИНА Електријада 2004
 РЈЕШЕЊА ЗАДАТАКА СА ТАКМИЧЕЊА ИЗ ЕЛЕКТРИЧНИХ МАШИНА Електријада 004 ТРАНСФОРМАТОРИ Tрофазни енергетски трансформатор 100 VA има напон и реактансу кратког споја u 4% и x % респективно При номиналном оптерећењу
РЈЕШЕЊА ЗАДАТАКА СА ТАКМИЧЕЊА ИЗ ЕЛЕКТРИЧНИХ МАШИНА Електријада 004 ТРАНСФОРМАТОРИ Tрофазни енергетски трансформатор 100 VA има напон и реактансу кратког споја u 4% и x % респективно При номиналном оптерећењу
Терминирање флексибилних технолошких процеса
 ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-8 Терминирање производно-технолошких ентитета Терминирање флексибилних технолошких процеса Терминирање (енгл. scheduling) представља процес планирања машинске обраде,
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-8 Терминирање производно-технолошких ентитета Терминирање флексибилних технолошких процеса Терминирање (енгл. scheduling) представља процес планирања машинске обраде,
Ваљак. cm, а површина осног пресека 180 cm. 252π, 540π,... ТРЕБА ЗНАТИ: ВАЉАК P=2B + M V= B H B= r 2 p M=2rp H Pосн.пресека = 2r H ЗАДАЦИ:
 Ваљак ВАЉАК P=B + M V= B H B= r p M=rp H Pосн.пресека = r H. Површина омотача ваљка је π m, а висина ваљка је два пута већа од полупрчника. Израчунати запремину ваљка. π. Осни пресек ваљка је квадрат површине
Ваљак ВАЉАК P=B + M V= B H B= r p M=rp H Pосн.пресека = r H. Површина омотача ваљка је π m, а висина ваљка је два пута већа од полупрчника. Израчунати запремину ваљка. π. Осни пресек ваљка је квадрат површине
ТЕСТ МАТЕМАТИКА УПУТСТВО ЗА ПРЕГЛЕДАЊЕ
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА ПРИЈЕМНИ ИСПИТ ЗА УЧЕНИКЕ СА ПОСЕБНИМ СПОСОБНОСТИМА ЗА ИНФОРМАТИКУ
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА ТЕСТ МАТЕМАТИКА ПРИЈЕМНИ ИСПИТ ЗА УЧЕНИКЕ СА ПОСЕБНИМ СПОСОБНОСТИМА ЗА ИНФОРМАТИКУ
Слика 1. Слика 1.2 Слика 1.1
 За случај трожичног вода приказаног на слици одредити: а Вектор магнетне индукције у тачкама А ( и ( б Вектор подужне силе на проводник са струјом Систем се налази у вакууму Познато је: Слика Слика Слика
За случај трожичног вода приказаног на слици одредити: а Вектор магнетне индукције у тачкама А ( и ( б Вектор подужне силе на проводник са струјом Систем се налази у вакууму Познато је: Слика Слика Слика
Теорија одлучивања. Анализа ризика
 Теорија одлучивања Анализа ризика Циљеви предавања Упознавање са процесом анализе ризика Моделовање ризика Монте-Карло Симулација Предности и недостаци анализе ризика 2 Дефиниција ризика (квалитативни
Теорија одлучивања Анализа ризика Циљеви предавања Упознавање са процесом анализе ризика Моделовање ризика Монте-Карло Симулација Предности и недостаци анализе ризика 2 Дефиниција ризика (квалитативни
ЗБИРКА РЕШЕНИХ ЗАДАТАКА ЗА ПРИЈЕМНИ ИСПИТ ИЗ МАТЕМАТИКЕ
 Универзитет у Крагујевцу Машински факултет Краљево ЗБИРКА РЕШЕНИХ ЗАДАТАКА ЗА ПРИЈЕМНИ ИСПИТ ИЗ МАТЕМАТИКЕ Краљево, март 011. године 1 Публикација Збирка решених задатака за пријемни испит из математике
Универзитет у Крагујевцу Машински факултет Краљево ЗБИРКА РЕШЕНИХ ЗАДАТАКА ЗА ПРИЈЕМНИ ИСПИТ ИЗ МАТЕМАТИКЕ Краљево, март 011. године 1 Публикација Збирка решених задатака за пријемни испит из математике
Динамика. Описује везу између кретања објекта и сила које делују на њега. Закони класичне динамике важе:
 Њутнови закони 1 Динамика Описује везу између кретања објекта и сила које делују на њега. Закони класичне динамике важе: када су објекти довољно велики (>димензија атома) када се крећу брзином много мањом
Њутнови закони 1 Динамика Описује везу између кретања објекта и сила које делују на њега. Закони класичне динамике важе: када су објекти довољно велики (>димензија атома) када се крећу брзином много мањом
Теорија електричних кола
 Др Милка Потребић, ванредни професор, Теорија електричних кола, предавања, Универзитет у Београду Електротехнички факултет, 07. Вишефазне електричне системе је патентирао српски истраживач Никола Тесла
Др Милка Потребић, ванредни професор, Теорија електричних кола, предавања, Универзитет у Београду Електротехнички факултет, 07. Вишефазне електричне системе је патентирао српски истраживач Никола Тесла
Теорија одлучивања. Циљеви предавања
 Теорија одлучивања Бајесово одлучивање 1 Циљеви предавања Увод у Бајесово одлучивање. Максимална а постериори класификација. Наивна Бајесова класификација. Бајесове мреже за класификацију. 2 1 Примене
Теорија одлучивања Бајесово одлучивање 1 Циљеви предавања Увод у Бајесово одлучивање. Максимална а постериори класификација. Наивна Бајесова класификација. Бајесове мреже за класификацију. 2 1 Примене