SISTEMI AUTOMATSKOG UPRAVLJANJA
|
|
|
- Σπύρο Πανταζής
- 7 χρόνια πριν
- Προβολές:
Transcript
1 SISTEMI AUTOMATSKOG UPRAVLJANJA
2 Ihodi učenja: Predavanje Modelovanje SAU-a Nakon avladavanja gradiva a ovog predavanja tudenti će moći da: v Klaifikuju ignale i iteme prema različitim kriterijumima v Prepoznaju da diferencijalne jednačine mogu da modeluju dinamiku fizičkih itema v Linearizuju nelinearni item razvojem u Tejlorov red v Razumiju primjenu Laplaove tranformacije i njenu ulogu kod linearnih itema v Razumiju ulogu blokova dijagrama ili dijagrama tokova ignala u analizi itema v Shvate značaj modelovanja u proceu dizajna SAU-a
3 Klaifikacija ignala Signali u SAU: Prenoe informacije a jednog itema na drugi Vremenki promjenljiva fizička veličina koja noi neku informaciju Determinitički ignali Slučajni (tohatički) ignali Opiuju e nekom matematičkom funkcijom Napon, pozicija, brzina, temperatura u primjeri determinitickih ignala Opiuju e funkcijom rapodjele vjerovatnoće Šumovi i neke vrte poremećaja predtavljaju lučajne ignale 3
4 Klaifikacija ignala Kontinualni Dikretan po amplitudi Definian u vakom trenutku vremena i može imati bilo koju vrijednot amlitude Dikretan po vremenu Definian u vakom trenutku vremena i može imati određene vrijednoti amlitude Dikretan po amplitudi i vremenu Definian u određenim trenucima vremena i može imati bilo koju vrijednot amlitude Definian u određenim trenucima vremena i može imati određene vrijednot amlitude 4
5 Klaifikacija itema KRITERIJUM VRSTA SISTEMA Broj ulaznih i izlaznih promjenljivih SISO MIMO Vremenka zavinot promjenljivih Statički Dinamički Protorna zavinot promjenljivih Sa koncentrianim parametrima Sa ditribuiranim parametrima Neprekidnot promjenljivih Kontinualni Dikretni Veze između promjenljivih Linearni Nelinearni Vremenka zavinot parametara Stacionarni Netacionarni Vremenka uzročnot promjenljivih Kauzalni Nekauzalni 5
6 Klaifikacija itema SISO Sa jednim ulazom i jednim izlazom (Single-Input and Single-Output) MIMO Sa više ulaza i izlaza (Multiple-Input and Multiple-Output) Statički (bez memorije): izlaz u trenutku t zavii amo od ulaza u trenutku t opiuju e običnim jednačinama Primjer: kolo a otpornicima Dinamički (a memorijom): izlaz u trenutku t zavii od prošlih vrijednoti izlaza Opiuju e diferencijalnim jednačinama Primjer: RLC kolo 6
7 Klaifikacija itema Stacionarni (vremenki invarijantni) Matematički e opiuju diferencijalnim jednačinama a kontantnim koeficijentima Netacionarni (promjenljivi u vremenu) Matematički e opiuju diferencijalnim jednačinama a promjenljivim koeficijentima Primjer: avion čija e maa mijenja uljed potrošnje goriva Kauzalni: izlaz u trenutku t zavii amo ulaza u trenutku t, kao i od ulaza u prethodnim trenucima Svi itemi u realnom vremenu u kauzalni Nekauzalni: Ne mogu e hardverki realizovati Moguće je obrađivati buduće podatke ako u ačuvani u memoriji 7
8 Klaifikacija itema Sitemi a koncentrianim parametrima: Matematički e opiuju običnim diferencijalnim ili diferencnim jednačinama Promjenljive itema zavie amo od vremena Drugim riječima, u vim tačkama itema ulaz djeluje itovremeno Primjer: RLC kolo Sitemi a ditribuiranim parametrima: Matematički e opiuju parcijalnim diferencijalnim jednačinama Promjenljive itema zavie od vremena i protornih koordinata Primjer: zvučni ili elektromagnetni talai 8
9 Klaifikacija itema Kontinualni itemi: Matematički e opiuju diferencijalnim jednačinama x(t) Kontinualni item Sitem y(t) y( t) y( t) x( t) Dikretni itemi: Matematički e opiuju diferencnim jednačinama x(t) D/A x(nt) Dikretni item Sitem y(nt) A/D y(t) y(( n ) T ) ( T ) y( nt ) Tx( nt ) 9
10 Klaifikacija itema x(t) Kontinualni item Sitem y(t) xt () yt () x(t) D/A x(nt) Dikretni item Sitem y(nt) A/D y(t) xt () x( nt ) y( nt ) yt () 0
11 Kontinualni LTI itemi U ovom kuru e bavimo: v Kontinualnim v Linearnim jer u jednotavni za njih je razvijena opšta teorija potoje metode za linearizaciju nelinearnih itema v Vremenki invarijantim v Kauzalnim itemima Kod većine itema e može matrati da u parametri nepromjenljivi SAU u real-time itemi v Sa koncentrianim parametrima SAU najčešće ima koncentriane parametre
12 Klaifikacija itema Linearni itemi: Opiuju e homogenim diferencijalnim jednačinama Važe principi uperpozicije i homogenoti Sitem je linearan ako je: odziv itema na ax(t) jednak ay(t), pri čemu je y(t) odziv itema na x(t) (homogenot) odziv itema na x (t)+x (t) jednak y (t)+ y (t), pri čemu u y (t) i y (t) odzivi itema na x (t) i x (t), repektivno (uperpozicija) Nelinearni itemi: Ne važe principi uperpozicije i homogenoti U praki itemi najčešće potaju nelinearni za velike vrijednoti ulaznih ignala
13 Klaifikacija itema Klaifikovati kontunualne iteme opiane ljedećim jednačinama: a) b) c) d) e) f) g) y t u t ( ) ( ) y( t) y( t) y( t) u( t) y t y t y t u t ( ) ( ) ( ) ( ) y( t) y( t) u( t) y( t) ty( t) y( t) u( t) y( t) in( t) y( t) u( t) y( t) u( t) 3
14 Klaifikacija itema Rješenje tavke a) y(t) = au (t) Odziv itema na ignal au(t) je jednak a u (t), odnono različit od au (t) Kako nije ipunjen ulov homogenoti, zaključujemo da je item je nelinaran Sitem je vremenki invarijantan, jer u koeficijenti koji množe promjenljive kontantni (ne zavie od vremena) 3 Sitem je tatički jer izlaz u trenutku t zavii amo od trenutne vrijednoti ulaza 4 Sitem je kauzalan jer odziv u tekućem trentuku vremena ne zavii od budućih vrijednoti ulaznog ignala 5 Sitem ima koncentriane parametre, jer oni ne zavii od protornih koordinata (koficijenti koji promjenljive) 4
15 Modeli itema Modelovanje komponenti itema je prvi korak u analizi i dizajnu SAU-a Modele itema možemo podijeliti u više kategorija: Vrte modela Matematički modeli Softverki model 3 Grafički modeli 4 Mentalni modeli Kreiranje matematičkih modela Fizičko modelovanje Identifikacija 3 Kombinovano Fizičko modelovanje podrazmijeva direktnu primjenu fizičkih zakona na pomatrani item ili komponente itema Kod ovog tipa modelovanja nije potrebno raditi ekperimente na itemu, ali je potrebno poznavati parametre itema (otpornot, maa, itd) Identifikacija podrazumijeva pretpotavku, odnono uvajanje nekog matematičkog modela itema Najčšeće e nimaju ulazi i izlazi realnog itema, na onovu kojih e identifikaju parametri uvojenog modela 5
16 Različite reprezentacije itema Linearni vremenki invarijanti itemi e mogu modelovati na više načina: v v v v Obične diferencijalne jednačine višeg reda (ODE) Model u protoru tanja (SS model) Prenona funkcija (TF model) Strukturni blok dijagram (SBD model) U vremenkom domenu LTI itemi e opiuju diferencijalnim jednačinama a kontantim koeficijentima, direktnom primjenom fizičkih zakona na pomatrani item Uvođenjem odgovarajućih mjena, diferencijalne jednačine višeg reda e mogu zapiati u vidu itema jednačina prvog reda, na taj način dobijajući model itema u protoru tanja Pored vremenkog domena, LTI itemi e mogu modelovati u -domenu, pomoću funckcije prenoa, ili trukturnog blok dijagrama, kod kojeg e item i tokovi ignala u njemu detaljnije prikazuju odgovarajućim blokovima 6
17 Diferencijalne jednačine višeg reda U opštem lučaju LTI item e može modelovati običnom diferencijalnom jednačinom n-tog reda a kontantnim koeficijentima: n n m m d y d y dy d u d u du n 0 m n n m m 0 a a a y b b b u dt dt dt dt dt dt ODE model U gornjoj jednačini y(t) predtavlja izlaz, a u(t) ulaz itema Sa dene trane jednačine mogu figuriati izvodi ulaznog ignala do m-tog reda, pri čemu, za kauzalan item važi da je m n Ovakav način modelovanja nije praktičan za opštu analizu itema, pa e iz toga razloga uvodi kocept modelovanja u protoru tanja 7
18 Primjer - ODE Tranlatorni mehanički item F m mx Bx kx Model item e dobija primjenom Njutnovih zakona dinamike Inercijalna ila, ila trenja i ila elatičnoti e opiru kretanju tijela m x + B x + kx = F ODE model 8
19 Primjer - ODE Rotacioni mehanički item J B k Model item e dobija primjenom Njutnovih zakona dinamike Inercijalna ila, ila trenja i ila elatičnoti e opiru kretanju tijela J θ + B θ + kθ = τ ODE model 9
20 Primjer 3 - ODE Električni item R L C u(t) Model električnog itema e dobija primjenom Kirhofovih zakona Red diferencijalne jednačine zavii od broja kondenzatora i kalemova + di t u Ri L i( t) 0 dt C 0 Lq Rq q u ODE model C 0

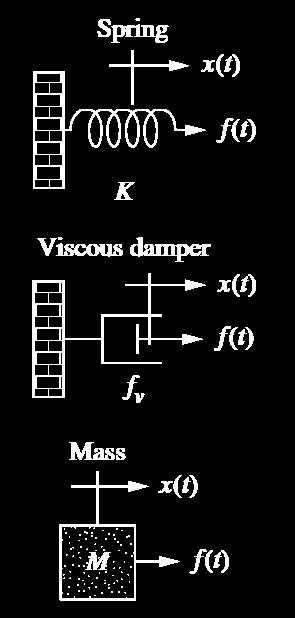
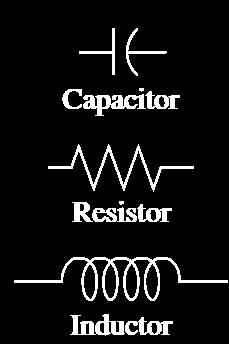
21 Analogije između električnih i mehaničkih veličina
22 Model u protoru tanja (State Space, SS) Model u protoru tanja predtavlja item diferencijalnih jednačina prvog reda kojima e opiuje dinamika itema Za kontinualne iteme: x( t) f ( x( t), u( t), t) y( t) g( x( t), u( t), t) SS model U opšem obliku itemi u nelinearni a vremenki promjenljivim koeficijentima Za kontinualne linearne vremenki invarijante iteme (LTI): x( t) Ax( t) Bu( t) y( t) Cx( t) Du( t) SS model Kod LTI itema e može korititi jednotavniji zapi Koncept protora tanja e odnoi na opiivanje dinamike itema minimalnim brojem varijabli koje e zovu promjenljive tanja, na takav način da odziv itema u poptunoti definian za bilo koji ulazni ignal Za razliku od funkcije prenoa, ovaj način modelovanja daje mogućnot uvid u ve promjenljive itema, a ne amo u izlaz itema
23 p np n n p p n nn n n n n n u u u b b b b b b b b b x x x a a a a a a a a a x x x Model u protoru tanja 3 Generalna forma LTI itema u protoru tanja SS model ( ) ( ) ( ) ( ) ( ) ( ) t t t t t t x Ax Bu y Cx Du A B () t x () t x () t u jednačine tanja izlazne jednačine Jednačine tanja i izlazne jednačine e zapiuju u matričnom obliku Ovakav zapi je pogodiniji za matematičku analizu i imulaciju itema Promjenljive tanja nekad mogu imati amo matematički miao

24 Primjer redno RLC kolo (I) ODE jednačina koja opiuje RLC kolo: Lq Rq q u C Svaka diferencijalna jednačina n-tog reda e može veti na n dif jednačina prvog reda, uvođenjem odgovarajućih mjena: x x q q x q x x q Uvrštavanjem uvedenih promjenljivih u polaznu jednačinu dobija e model itema u protoru tanja 0 0 x x R x x LC L L x y 0 R 0u x u SS model 4
25 Primjer redno RLC kolo (II) Kod elektičnih itema potoji konvencija da e za promjenljive tanja uvajaju naponi na kondenzatorima i truje kroz kalemove Ovo vodi ka jednotavnijem definianju modela u protoru tanja Za promjenljve tanja ćemo uvojiti truju i L i napon u c Treba pronaći: i u u RiL LiL uc 0 i i Cu C L c y Ri L f ( i, u, u) L L c f ( i, u, u) c L c y f ( i, u, u) L c R il i L L L L u C u C 0 0 C il y R 0 0u u C u SS model 5
26 Primjer DC motor Model DC motora je prikazan na lici Namotaji motora imaju otpornot R i induktivnot L Moment inercije vratila je J, dok je koeficijent trenja b Uljed okretanja motora na namotajima e indukuje kontra elektromotorna ila e koja je proporcionalna brzini okretanja vratila (e = k e ω) Obrtni moment koji rotira vratilo je proporcionalan truji kroz namotaje (τ=k t i) Diferencijalne jednačine koje opiuju dati item imaju ljedeći oblik: J b k i di L Ri u ke dt t u(t) + R i(t) L + e(t) M, d 0 b / J k / J 0 u dt i 0 k / L R / L i / L y 0 0 SS model i b J 6
27 Modelovanje pomoću funkcije prenoa (TF) U opštem lučaju LTI item e opiuje diferencijalnom jednačinom: n n m m d y d y dy d u d u du n 0 m n n m m 0 a a a y b b b u dt dt dt dt dt dt Funkcija prenoa e definiše kao odno izlaznog i ulaznog ignala, pri nultim početnim ulovima Koriteći oobinu izvoda, gornja jednačina e može prebaciti u -domen: ( a a a ) Y ( ) ( b b b ) X ( ) n n m m n 0 m 0 Funkcija prenoa je jednaka: G () m b b b n a a a m m 0 n n 0 ODE model TF model 7
28 Prelazak iz SS u TF domen Na ličan e može naći veza između modela u protoru tanja i funkcije prenoa: x( t) Ax( t) Bu( t) y( t) Cx( t) Du( t) X( ) - x(0 ) AX( ) BU( ) Y( ) CX( ) DU( ) X I A BU ( ) ( ) ( ) Y C I A B DU Y( ) G( ) X( ) ( ) ( ) ( ) G( ) C( I A) B D Oobina prvog izvoda Voditi računa da e radi o matričnoj jednačini SS model TF model 8
29 Tabela Laplaovih tranformacija n0 f(t) F() () t ht () ( t nt) t t n t n! e T 3 n at e a e e f(t) F() at te ( a) e at a ( a ) in( t) at in( t) co( t) at ( a) co( t) a ( a) 9
30 Oobine Laplaove tranformacije Oobina Definicija Ilutracija L f ( t) F( ) t F( ) f ( t) e dt 0 Af ( t) Bf ( t) L AF ( ) BF ( ) Linearnot Prvi izvod Drugi izvod n th izvod Integral Množenje a vremenom d f t df () t L F( ) f (0 ) dt () L ' F( ) f (0 ) f (0 ) dt n n d f () t L n ni ( ni) F( ) f (0 ) dt t 0 i L f ( t) dt F( ) L df() tf ( t) F( ) d Oobina Vremenki pomjeraj Komplekni pomjeraj Vremenko kaliranje Ilutracija L a f ( t a) h( t a) e F( ) at L f ( t) e F( a) t L f af( a) a Konvolucija f( t)* f( t) L F ( ) F ( ) Teorema o početnoj vrijednoti Teorema o krajnjoj vrijednoti lim f ( t) lim F( ) t0 lim f ( t) lim F( ) t 0 30
31 Oobine funkcije prenoa Nek od oobina funkcije prenoa u pobrojane ipod: Primjenjiva ja amo na linearne vremenki invarijantne iteme Izvedena je za nulte početne ulove 3 Funkcija prenoa e može definiati i kao Laplaova tranformacija impulnog odziva itema 4 Prikazuje amo vezu između ulaza i izlaza, pa u neke bitnije informacije unutar itema nevidljive 5 Uprošćava matematičku analizu itema: diferencijalne jednačine e vode na algebarke, konvolucija predtavlja množenje blokova u domenu, itd 3
32 Primjer DC motor J b k i di L Ri u ke dt t ODE model d 0 b / J k / J 0 u dt i 0 k / L R / L i / L y 0 0 SS model i u(t) + R i(t) Diferencijalne jednačine u -domenu imaju oblik: L ( J b) ( ) kti( ) + e(t) ( L R) I( ) U k ( ) e M, b J () kt G () U ( ) ( L R)( J b) k k TF model e t Funkcija prenoa e dobija rješavajući gornji item jednačina ili koriteći vezu između prenone funkcije i modela u protoru tanja 3
33 Strukturni blok dijagram Jedan način modelovanja je trukturni blok dijagram, pomoću kojeg e prikazuju komponetne itema i njihove međuobne veze, odnono tokovi ignala među komponentama Svaka komponenta itema e modeluje odgovarajućom funkcijom prenoa, koja e određuje na onovu diferencijlanih jednačina kojima e opiuje dinamičko ponašanje itema Za razliku od funkcije prenoa koja daje informaciju o vezi između ulaza i izlaza, trukturni blok dijagram pruža deteljnije informacije o unutrašnjoj trukturi itema Na narednim predavanjima biće objašnjen potupak vođenja trukturnog blok dijagrama na onovnu trukturu (funkciju prenoa) 33
34 Primjer DC motor J b k i di L Ri u ke dt t ODE model d 0 b / J k / J 0 u dt i 0 k / L R / L i / L y 0 0 SS model i u(t) + ( J b) ( ) kti( ) ( L R) I( ) U k ( ) R i(t) L + e(t) M, b () kt G () U ( ) ( L R)( J b) k k e TF model J e t U() - L R k t I () T() J b () () SBD model k e 34
35 Različite reprezentacije itema ODE model SS model TF model SBD model Dikutovano na predavanjima Na nekom od ljedećih predavanja 35
36 Linearizacija itema v v v Veliki broj fizičkih itema ima nelinearnu prirodu Matematički linearizacija znači pronalaženje linearne aprokimacije funkcije u okolini neke tačke df ( x) f ( x) f ( x) ( x x) tariji članovi dx x Kod dinamičkih itema linearizacije e najčešće vrši u okolini tacionarne tačke (ekvilibrijuma) koja e dobija izjednačavanjem izvoda a nulom (izvod od kontante je jednak nuli) 36
37 Jednačina a jednom promjenljivom x f ( x), x(0 ) xp Funkcija f(x) može biti razvijena u Taylor-ov red u okolini tacionarne tačke x (radna tačka): df ( x) f ( x) f ( x) ( x x) tariji članovi dx x Vrijednot izvoda funkcije f(x) u tački x Stacionarna tačka x e dobija izjednačavanjem izvoda a nulom: x f ( x ) 0 37
38 Jednačina a jednom promjenljivom 0 a df ( x) x f ( x) ( x x) dx x a( x x ) Kako je izvod od kontante jednak nuli, može e zapiati: x dx() t dt d( x x) dt a( x x ) Na najčešće zanima devijacija itema od tacionarnog tanja: df ( x) xˆ axˆ, xˆ (0 ) xp - x, a dx x 38
39 Geometrijka interpretacija f() t f ˆ( t) Dobro poklapanje fˆ ( t) axˆ ( t) xt ˆ( ) f ( t) f ( x( t)) Radna tačka xt () 39
40 Jednačina a jednom promjenljivom i izlazom x f ( x, u), x(0 ) xp Koriteći razvoj u Taylor-ov u okolini tacionarne tačke (x, u ): 0 df ( x, u) df ( x, u) f ( x) f ( x, u) ( x x) ( u u) tariji članovi dx du x d( x x ) df ( x, u) df ( x, u) ( x x) ( u u) dt dx du u xˆ x x, uˆ u u u u x f ( x, u ) 0 xˆ axˆ buˆ, x(0 ) xp x a f ( x, u) f ( x, u), b dx du u u 40
41 Jednačina a jednom promjenljivom i izlazom Na ličan način e linearizuje izlazna jednačina y g( x, u) g( x) g( x, u) g( x, y) g( x, u) ( x x) ( u u) dx du x f ( x, u) f ( x, u) y y ( x x ) ( x u ) dx du u yˆ y y, xˆ x x, uˆ u u u u x f ( x ) 0 yˆ cxˆ duˆ c g( x, u) g( x, u), d dx du u u 4
42 Linearizacija itema u opštem obliku Model u protoru tanja nelinearnog itema: x( t) f ( x( t), u( t)) y( t) g( x( t), u( t)) Neka je x(t), u(t), y(t) et trajektorija (rješenja) koja zadovoljavaju gornji item diferencijalnih jednačina x ( t) f ( x ( t), u ( t)), za zadato x ( t ) y ( t) g( x ( t), u ( t)) f f x( t) f ( x, u) ( x( t) x) ( u( t) u) x xx u xx uu g g y( t) g( x, u) ( x( t) xq) ( u( t) u) x xx u xx uu uu uu 0 4
43 Linearizacija itema f ( x,u) f ( x,u) x( t) f ( x, u) ( x( t) x) ( u( t) u) x xx u xx uu g( x,u) g( x,u) y( t) g( x, u) ( x( t) x) ( u( t) u) x xx u xx uu uu uu xˆ ( t) Axˆ ( t) Buˆ ( t) yˆ ( t) xˆ ( t) Duˆ ( t) A C f ( x,u) x g( x,u) x xx uu xx uu B D f ( x,u) u g( x,u) u xx uu xx uu 43
44 Primjer Kontinualni item je opian diferencijalnom jednačinom: u () t x( t) f ( x( t), u( t)) x( t), x(0 ) 05 3 Linearizovati model pod pretpotavkom da ulazni ignal varira u okolini vrijednoti u= 6 0 u x x 3 9 Radna tačka: u, x
45 Primjer Potupak linearizacije: xˆ ( t) Axˆ ( t) Buˆ ( t) yˆ ( t) xˆ ( t) Duˆ ( t) A C f g f B u x xx xx uu uu g D x xx u xx uu uu A f 3 xx, uu x x 8 B f 4 x x, u u u u xˆ xˆ uˆ 8 3 Odtupanje od nominalne vrijednoti x = 6/9 45

46 Primjer Simulacija diferencijalnih jednačina (u SIMULINK-u): 46
 u xt () xt ˆ( ) xt ˆ( ) ut () u x ( t) xˆ ( t) x L x")
47 Simulacioni blok dijagram xt () xt () ut () uˆ( t) u( t) u xt () xt ˆ( ) xt ˆ( ) ut () u x ( t) xˆ ( t) x L x 47
48 Primjer Modelovati klatno prikazano na lici, a zatim linearizovati dobijeni model u okolini tacionarne tačke θ l F mg d J Fl mgl in, J ml dt x x x F ml g in x l x x x u 0 0 xˆ ˆ x g Fˆ xˆ 0 xˆ l ml, x 0 tacionarna tačka (ravnotežno tanje) Napomena: Potoji još jedna tacionarna tačka u x =u=0, x =π 48
Prikaz sustava u prostoru stanja
 Prikaz sustava u prostoru stanja Prikaz sustava u prostoru stanja je jedan od načina prikaza matematičkog modela sustava (uz diferencijalnu jednadžbu, prijenosnu funkciju itd). Promatramo linearne sustave
Prikaz sustava u prostoru stanja Prikaz sustava u prostoru stanja je jedan od načina prikaza matematičkog modela sustava (uz diferencijalnu jednadžbu, prijenosnu funkciju itd). Promatramo linearne sustave
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
OSNOVI AUTOMATSKOG UPRAVLJANJA PROCESIMA. Vežba br. 3: Dinamički modeli sistema u MATLABu
 OSNOVI AUTOMATSKO UPAVLJANJA POCESIMA Vežba br. : Dinamički modeli itema u MATLABu I Prenone funkcije Dinamički itemi e mogu prikazati u tri domena: vremenkom, Laplace-ovom i frekentnom. U vremenkom domenu
OSNOVI AUTOMATSKO UPAVLJANJA POCESIMA Vežba br. : Dinamički modeli itema u MATLABu I Prenone funkcije Dinamički itemi e mogu prikazati u tri domena: vremenkom, Laplace-ovom i frekentnom. U vremenkom domenu
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
Funkcija prenosa linearnog sistema
 Funkcija prenoa linearnog itema Pomatra e kontinualni, linearni, tacionarni item a jednim ulazom i jednim izlazom prikazan na lici. u Slika Definicija: Funkcija prenoa itema e definiše kao odno Laplaove
Funkcija prenoa linearnog itema Pomatra e kontinualni, linearni, tacionarni item a jednim ulazom i jednim izlazom prikazan na lici. u Slika Definicija: Funkcija prenoa itema e definiše kao odno Laplaove
IZVODI ZADACI (I deo)
") IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Ispitivanje toka i skiciranje grafika funkcija
 Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Osnovne teoreme diferencijalnog računa
 Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Poglavlje 7. Blok dijagrami diskretnih sistema
 Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
Poglavlje 7 Blok dijagrami diskretnih sistema 95 96 Poglavlje 7. Blok dijagrami diskretnih sistema Stav 7.1 Strukturni dijagram diskretnog sistema u kome su sve veliqine prikazane svojim Laplasovim transformacijama
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
Otpornost R u kolu naizmjenične struje
 Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
5 Ispitivanje funkcija
 5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Zadatak 2 Odrediti tačke grananja, Riemann-ovu površ, opisati sve grane funkcije f(z) = z 3 z 4 i objasniti prelazak sa jedne na drugu granu.
 = z 3 z 4 i objasniti prelazak sa jedne na drugu granu.") Kompleksna analiza Zadatak Odrediti tačke grananja, Riemann-ovu površ, opisati sve grane funkcije f(z) = z z 4 i objasniti prelazak sa jedne na drugu granu. Zadatak Odrediti tačke grananja, Riemann-ovu
Kompleksna analiza Zadatak Odrediti tačke grananja, Riemann-ovu površ, opisati sve grane funkcije f(z) = z z 4 i objasniti prelazak sa jedne na drugu granu. Zadatak Odrediti tačke grananja, Riemann-ovu
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika. Monotonost i ekstremi. Katica Jurasić. Rijeka, 2011.
 Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
SISTEMI AUTOMATSKOG UPRAVLJANJA
 SISTEMI AUTOMATSKOG UPRAVLJANJA Ishodi učenja: Predavanje 4 Prostor stanja: jednačine kretanja i Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu fundamentalnu matricu sistema
SISTEMI AUTOMATSKOG UPRAVLJANJA Ishodi učenja: Predavanje 4 Prostor stanja: jednačine kretanja i Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu fundamentalnu matricu sistema
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
Zavrxni ispit iz Matematiqke analize 1
 Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
4.7. Zadaci Formalizam diferenciranja (teorija na stranama ) 343. Znajući izvod funkcije x arctg x, odrediti izvod funkcije x arcctg x.
 343. Znajući izvod funkcije x arctg x, odrediti izvod funkcije x arcctg x.") 4.7. ZADACI 87 4.7. Zadaci 4.7.. Formalizam diferenciranja teorija na stranama 4-46) 340. Znajući izvod funkcije arcsin, odrediti izvod funkcije arccos. Rešenje. Polazeći od jednakosti arcsin + arccos
4.7. ZADACI 87 4.7. Zadaci 4.7.. Formalizam diferenciranja teorija na stranama 4-46) 340. Znajući izvod funkcije arcsin, odrediti izvod funkcije arccos. Rešenje. Polazeći od jednakosti arcsin + arccos
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
8 Funkcije više promenljivih
 8 Funkcije više promenljivih 78 8 Funkcije više promenljivih Neka je R skup realnih brojeva i X R n. Jednoznačno preslikavanje f : X R naziva se realna funkcija sa n nezavisno promenljivih čiji je domen
8 Funkcije više promenljivih 78 8 Funkcije više promenljivih Neka je R skup realnih brojeva i X R n. Jednoznačno preslikavanje f : X R naziva se realna funkcija sa n nezavisno promenljivih čiji je domen
10. STABILNOST KOSINA
 MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
INTEGRALNI RAČUN. Teorije, metodike i povijest infinitezimalnih računa. Lucija Mijić 17. veljače 2011.
 INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
Elektromotorni pogon je jedan DINAMIČKI SISTEM, koji se može podeliti na više DINAMIČKIH PODSISTEMA između kojih postoji INTERAKCIJA.
 ELEKTROMOTORNI POGON KAO DINAMIČKI SISTEM Elektromotorni pogon je jedan DINAMIČKI SISTEM, koji se može podeliti na više DINAMIČKIH PODSISTEMA između kojih postoji INTERAKCIJA. apstraktan. DINAMIČKI SISTEM
ELEKTROMOTORNI POGON KAO DINAMIČKI SISTEM Elektromotorni pogon je jedan DINAMIČKI SISTEM, koji se može podeliti na više DINAMIČKIH PODSISTEMA između kojih postoji INTERAKCIJA. apstraktan. DINAMIČKI SISTEM
MATEMATIKA 2. Grupa 1 Rexea zadataka. Prvi pismeni kolokvijum, Dragan ori
 MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
APROKSIMACIJA FUNKCIJA
 APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
Elektrotehnički fakultet univerziteta u Beogradu 26. jun Katedra za Računarsku tehniku i informatiku
 Elektrotehički fakultet uiverziteta u Beogradu 6. ju 008. Katedra za Račuarku tehiku i iformatiku Performae račuarkih itema Rešeja zadataka..videti predavaja.. Kretaje Verovatoća Opi 4 4 Kretaje u itom
Elektrotehički fakultet uiverziteta u Beogradu 6. ju 008. Katedra za Račuarku tehiku i iformatiku Performae račuarkih itema Rešeja zadataka..videti predavaja.. Kretaje Verovatoća Opi 4 4 Kretaje u itom
Dužina luka i oskulatorna ravan
 Dužina luka i oskulatorna ravan Diferencijalna geometrija Vježbe Rješenja predati na predavanjima, u srijedu 9. ožujka 16. god. Zadatak 1. Pokazati da je dužina luka invarijantna pod reparametrizacijom
Dužina luka i oskulatorna ravan Diferencijalna geometrija Vježbe Rješenja predati na predavanjima, u srijedu 9. ožujka 16. god. Zadatak 1. Pokazati da je dužina luka invarijantna pod reparametrizacijom
(P.I.) PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.
 PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.") 1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
Funkcija prenosa. Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k.
 OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
OT3OS1 7.11.217. Definicije Funkcija prenosa Funkcija prenosa se definiše kao količnik z transformacija odziva i pobude. Za LTI sistem: y n h k x n k Y z X z k Z y n Z h n Z x n Y z H z X z H z H z n h
(y) = f (x). (x) log ϕ(x) + ψ(x) Izvodi parametarski definisane funkcije y = ψ(t)
 = f (x). (x) log ϕ(x) + ψ(x) Izvodi parametarski definisane funkcije y = ψ(t)") Izvodi Definicija. Neka je funkcija f definisana i neprekidna u okolini tačke a. Prvi izvod funkcije f u tački a je Prvi izvod funkcije f u tački : f f fa a lim. a a f lim 0 Izvodi višeg reda funkcije
Izvodi Definicija. Neka je funkcija f definisana i neprekidna u okolini tačke a. Prvi izvod funkcije f u tački a je Prvi izvod funkcije f u tački : f f fa a lim. a a f lim 0 Izvodi višeg reda funkcije
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Matematika 4. t x(u)du + 4. e t u y(u)du, t e u t x(u)du + Pismeni ispit, 26. septembar e x2. 2 cos ax dx, a R.
du + 4. e t u y(u)du, t e u t x(u)du + Pismeni ispit, 26. septembar e x2. 2 cos ax dx, a R.") Matematika 4 zadaci sa pro²lih rokova, emineter.wordpress.com Pismeni ispit, 26. jun 25.. Izra unati I(α, β) = 2. Izra unati R ln (α 2 +x 2 ) β 2 +x 2 dx za α, β R. sin x i= (x2 +a i 2 ) dx, gde su a i
Matematika 4 zadaci sa pro²lih rokova, emineter.wordpress.com Pismeni ispit, 26. jun 25.. Izra unati I(α, β) = 2. Izra unati R ln (α 2 +x 2 ) β 2 +x 2 dx za α, β R. sin x i= (x2 +a i 2 ) dx, gde su a i
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
VJEŽBE 3 BIPOLARNI TRANZISTORI. Slika 1. Postoje npn i pnp bipolarni tranziostori i njihovi simboli su dati na slici 2 i to npn lijevo i pnp desno.
 JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
RIJEŠENI ZADACI I TEORIJA IZ
 RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
Prvi kolokvijum. y 4 dy = 0. Drugi kolokvijum. Treći kolokvijum
 27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
27. septembar 205.. Izračunati neodredjeni integral cos 3 x (sin 2 x 4)(sin 2 x + 3). 2. Izračunati zapreminu tela koje nastaje rotacijom dela površi ograničene krivama y = 3 x 2, y = x + oko x ose. 3.
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
ELEKTROMOTORNI POGONI - AUDITORNE VJEŽBE
 veučilište u ijeci TEHNIČKI FAKULTET veučilišni preddiplomki tudij elektrotehnike ELEKTOOTONI OGONI - AUDITONE VJEŽBE Ainkroni motor Ainkroni motor inkrona obodna brzina inkrona brzina okretanja Odno n
veučilište u ijeci TEHNIČKI FAKULTET veučilišni preddiplomki tudij elektrotehnike ELEKTOOTONI OGONI - AUDITONE VJEŽBE Ainkroni motor Ainkroni motor inkrona obodna brzina inkrona brzina okretanja Odno n
Operacije s matricama
 Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
4 Numeričko diferenciranje
 4 Numeričko diferenciranje 7. Funkcija fx) je zadata tabelom: x 0 4 6 8 fx).17 1.5167 1.7044 3.385 5.09 7.814 Koristeći konačne razlike, zaključno sa trećim redom, odrediti tačku x minimuma funkcije fx)
4 Numeričko diferenciranje 7. Funkcija fx) je zadata tabelom: x 0 4 6 8 fx).17 1.5167 1.7044 3.385 5.09 7.814 Koristeći konačne razlike, zaključno sa trećim redom, odrediti tačku x minimuma funkcije fx)
LAPLACEOVA TRANSFORMACIJA
 SVEUČILIŠTE U ZAGREBU FAKULTET KEMIJSKOG INŽENJERSTVA I TEHNOLOGIJE MATEMATIČKE METODE U KEMIJSKOM INŽENJERSTVU LAPLACEOVA TRANSFORMACIJA Studenti : Nikolina Jakšić Kornelije Kraguljac 1. Laplaceova tranformacija
SVEUČILIŠTE U ZAGREBU FAKULTET KEMIJSKOG INŽENJERSTVA I TEHNOLOGIJE MATEMATIČKE METODE U KEMIJSKOM INŽENJERSTVU LAPLACEOVA TRANSFORMACIJA Studenti : Nikolina Jakšić Kornelije Kraguljac 1. Laplaceova tranformacija
3. OSNOVNI POKAZATELJI TLA
 MEHANIKA TLA: Onovni paraetri tla 4. OSNONI POKAZATELJI TLA Tlo e atoji od tri faze: od čvrtih zrna, vode i vazduha i njihovo relativno učešće e opiuje odgovarajući pokazateljia.. Specifična težina (G)
MEHANIKA TLA: Onovni paraetri tla 4. OSNONI POKAZATELJI TLA Tlo e atoji od tri faze: od čvrtih zrna, vode i vazduha i njihovo relativno učešće e opiuje odgovarajući pokazateljia.. Specifična težina (G)
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
1 Promjena baze vektora
 Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Riješeni zadaci: Limes funkcije. Neprekidnost
 Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
5 Sistemi linearnih jednačina. a 11 x 1 + a 12 x a 1n x n = b 1 a 21 x 1 + a 22 x a 2n x n = b 2.
 5 Sistemi linearnih jednačina 47 5 Sistemi linearnih jednačina U opštem slučaju, pod sistemom linearnih jednačina podrazumevamo sistem od m jednačina sa n nepoznatih x 1 + a 12 x 2 + + a 1n x n = b 1 a
5 Sistemi linearnih jednačina 47 5 Sistemi linearnih jednačina U opštem slučaju, pod sistemom linearnih jednačina podrazumevamo sistem od m jednačina sa n nepoznatih x 1 + a 12 x 2 + + a 1n x n = b 1 a
MATERIJAL ZA VEŽBE. Nastavnik: prof. dr Nataša Sladoje-Matić. Asistent: dr Tibor Lukić. Godina: 2012
 MATERIJAL ZA VEŽBE Predmet: MATEMATIČKA ANALIZA Nastavnik: prof. dr Nataša Sladoje-Matić Asistent: dr Tibor Lukić Godina: 202 . Odrediti domen funkcije f ako je a) f(x) = x2 + x x(x 2) b) f(x) = sin(ln(x
MATERIJAL ZA VEŽBE Predmet: MATEMATIČKA ANALIZA Nastavnik: prof. dr Nataša Sladoje-Matić Asistent: dr Tibor Lukić Godina: 202 . Odrediti domen funkcije f ako je a) f(x) = x2 + x x(x 2) b) f(x) = sin(ln(x
I N Ž E N J E R S K A M A T E M A T I K A 2. Glava IV : DIFERENCIJALNE JEDNAČINE PRVOG REDA
 I N Ž E N J E R S K A M A T E M A T I K A 64 Glava IV : DIFERENCIJALNE JEDNAČINE PRVOG REDA 4 Osnovni pojmovi Činjenica da se mnogi zakoni fizike i drugih nauka iskazuju uz pomoć diferencijalnih jednačina
I N Ž E N J E R S K A M A T E M A T I K A 64 Glava IV : DIFERENCIJALNE JEDNAČINE PRVOG REDA 4 Osnovni pojmovi Činjenica da se mnogi zakoni fizike i drugih nauka iskazuju uz pomoć diferencijalnih jednačina
TRIGONOMETRIJSKE FUNKCIJE I I.1.
 TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
SEMINAR IZ KOLEGIJA ANALITIČKA KEMIJA I. Studij Primijenjena kemija
 SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
SISTEMI AUTOMATSKOG UPRAVLJANJA
 SISTEMI AUTOMATSKOG UPRAVLJANJA Predavanje 3 Modelovanje SAUa u s domenu Ishodi učenja: Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu polove, nule i pojačanje sistema i
SISTEMI AUTOMATSKOG UPRAVLJANJA Predavanje 3 Modelovanje SAUa u s domenu Ishodi učenja: Nakon savladavanja gradiva sa ovog predavanja studenti će moći da: v Definišu polove, nule i pojačanje sistema i
Strukture podataka i algoritmi 1. kolokvij 16. studenog Zadatak 1
 Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
SISTEMI AUTOMATSKOG UPRAVLJANJA SAU Predavanje 11
 SISTEMI AUTOMATSKOG UPRAVLJANJA SAU Predavanje Predmetni profeor: doc. dr. Vladimir Matić Predmetni aitent: doc. dr. Vladimir Matić e-mail: vmatic@ingidunum.ac.r PITANJE 6. CRTANJE BODE-OVIH FREKVENCIJSKIH
SISTEMI AUTOMATSKOG UPRAVLJANJA SAU Predavanje Predmetni profeor: doc. dr. Vladimir Matić Predmetni aitent: doc. dr. Vladimir Matić e-mail: vmatic@ingidunum.ac.r PITANJE 6. CRTANJE BODE-OVIH FREKVENCIJSKIH
Obrada signala
 Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
Obrada signala 1 18.1.17. Greška kvantizacije Pretpostavka je da greška kvantizacije ima uniformnu raspodelu 7 6 5 4 -X m p x 1,, za x druge vrednosti x 3 x X m 1 X m = 3 x Greška kvantizacije x x x p
radni nerecenzirani materijal za predavanja R(f) = {f(x) x D}
 = {f(x) x D}") Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
VILJUŠKARI. 1. Viljuškar se koristi za utovar standardnih euro-pool paleta na drumsko vozilo u sistemu prikazanom na slici.
 VILJUŠKARI 1. Viljuškar e korii za uoar andardnih euro-pool palea na druko ozilo u ieu prikazano na lici. PALETOMAT a) Koliko reba iljuškara da bi ree uoara kaiona u koji aje palea bilo anje od 6 in, ako
VILJUŠKARI 1. Viljuškar e korii za uoar andardnih euro-pool palea na druko ozilo u ieu prikazano na lici. PALETOMAT a) Koliko reba iljuškara da bi ree uoara kaiona u koji aje palea bilo anje od 6 in, ako
2. Ako je funkcija f(x) parna onda se Fourierov red funkcije f(x) reducira na Fourierov kosinusni red. f(x) cos
 parna onda se Fourierov red funkcije f(x) reducira na Fourierov kosinusni red. f(x) cos") . KOLOKVIJ PRIMIJENJENA MATEMATIKA FOURIEROVE TRANSFORMACIJE 1. Za periodičnu funkciju f(x) s periodom p=l Fourierov red je gdje su a,a n, b n Fourierovi koeficijenti od f(x) gdje su a =, a n =, b n =..
. KOLOKVIJ PRIMIJENJENA MATEMATIKA FOURIEROVE TRANSFORMACIJE 1. Za periodičnu funkciju f(x) s periodom p=l Fourierov red je gdje su a,a n, b n Fourierovi koeficijenti od f(x) gdje su a =, a n =, b n =..
INTELIGENTNO UPRAVLJANJE
 INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PP-talasi sa torzijom
 PP-talasi sa torzijom u metrički-afinoj gravitaciji Vedad Pašić i Dmitri Vassiliev V.Pasic@bath.ac.uk D.Vassiliev@bath.ac.uk Department of Mathematics University of Bath PP-talasi sa torzijom p. 1/1 Matematički
PP-talasi sa torzijom u metrički-afinoj gravitaciji Vedad Pašić i Dmitri Vassiliev V.Pasic@bath.ac.uk D.Vassiliev@bath.ac.uk Department of Mathematics University of Bath PP-talasi sa torzijom p. 1/1 Matematički
separacione operacije - destilacija, ekstrakcija, membranski procesi hemijski i biohemijske reakcije u reaktorima fluid za hlađenje rashlađen fluid
 UVOD Matematički model - kup matematičkih relacija koje opiuju veze između pojedinih fizičkih veličina u pomatranom proceu (dimenzije uređaja, vojtva uptanci, kinetički parametri, prinoi, protoci,... Tehnoekonomki
UVOD Matematički model - kup matematičkih relacija koje opiuju veze između pojedinih fizičkih veličina u pomatranom proceu (dimenzije uređaja, vojtva uptanci, kinetički parametri, prinoi, protoci,... Tehnoekonomki
Numerička matematika 2. kolokvij (1. srpnja 2009.)
") Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
6 Polinomi Funkcija p : R R zadana formulom
 6 Polinomi Funkcija p : R R zadana formulom p(x) = a n x n + a n 1 x n 1 +... + a 1 x + a 0, gdje su a 0, a 1,..., a n realni brojevi, a n 0, i n prirodan broj ili 0, naziva se polinom n-tog stupnja s
6 Polinomi Funkcija p : R R zadana formulom p(x) = a n x n + a n 1 x n 1 +... + a 1 x + a 0, gdje su a 0, a 1,..., a n realni brojevi, a n 0, i n prirodan broj ili 0, naziva se polinom n-tog stupnja s
DRUGI KOLOKVIJUM IZ MATEMATIKE 9x + 6y + z = 1 4x 2y + z = 1 x + 2y + 3z = 2. je neprekidna za a =
 x, y, z) 2 2 1 2. Rešiti jednačinu: 2 3 1 1 2 x = 1. x = 3. Odrediti rang matrice: rang 9x + 6y + z = 1 4x 2y + z = 1 x + 2y + 3z = 2. 2 0 1 1 1 3 1 5 2 8 14 10 3 11 13 15 = 4. Neka je A = x x N x < 7},
x, y, z) 2 2 1 2. Rešiti jednačinu: 2 3 1 1 2 x = 1. x = 3. Odrediti rang matrice: rang 9x + 6y + z = 1 4x 2y + z = 1 x + 2y + 3z = 2. 2 0 1 1 1 3 1 5 2 8 14 10 3 11 13 15 = 4. Neka je A = x x N x < 7},
( ) ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4
 ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4") UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
FAKULTET PROMETNIH ZNANOSTI
 SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
SVUČILIŠT U ZAGU FAKULTT POMTNIH ZNANOSTI predmet: Nastavnik: Prof. dr. sc. Zvonko Kavran zvonko.kavran@fpz.hr * Autorizirana predavanja 2016. 1 Pojačala - Pojačavaju ulazni signal - Zahtjev linearnost
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Ispit održan dana i tačka A ( 3,3, 4 ) x x + 1
 x x + 1") Ispit održan dana 9 0 009 Naći sve vrijednosti korjena 4 z ako je ( ) 8 y+ z Data je prava a : = = kroz tačku A i okomita je na pravu a z = + i i tačka A (,, 4 ) Naći jednačinu prave b koja prolazi ( +
Ispit održan dana 9 0 009 Naći sve vrijednosti korjena 4 z ako je ( ) 8 y+ z Data je prava a : = = kroz tačku A i okomita je na pravu a z = + i i tačka A (,, 4 ) Naći jednačinu prave b koja prolazi ( +
Funkcija gustoće neprekidne slučajne varijable ima dva bitna svojstva: 1. Nenegativnost: f(x) 0, x R, 2. Normiranost: f(x)dx = 1.
 0, x R, 2. Normiranost: f(x)dx = 1.") σ-algebra skupova Definicija : Neka je Ω neprazan skup i F P(Ω). Familija skupova F je σ-algebra skupova na Ω ako vrijedi:. F, 2. A F A C F, 3. A n, n N} F n N A n F. Borelova σ-algebra Definicija 2: Neka
σ-algebra skupova Definicija : Neka je Ω neprazan skup i F P(Ω). Familija skupova F je σ-algebra skupova na Ω ako vrijedi:. F, 2. A F A C F, 3. A n, n N} F n N A n F. Borelova σ-algebra Definicija 2: Neka
1 Obične diferencijalne jednadžbe
 1 Obične diferencijalne jednadžbe 1.1 Linearne diferencijalne jednadžbe drugog reda s konstantnim koeficijentima Diferencijalne jednadžbe oblika y + ay + by = f(x), (1) gdje su a i b realni brojevi a f
1 Obične diferencijalne jednadžbe 1.1 Linearne diferencijalne jednadžbe drugog reda s konstantnim koeficijentima Diferencijalne jednadžbe oblika y + ay + by = f(x), (1) gdje su a i b realni brojevi a f
Kola u ustaljenom prostoperiodičnom režimu
 Kola u ustalenom prostoperiodičnom režimu svi naponi i sve strue u kolu su prostoperiodične (sinusoidalne ili kosinusoidalne funkcie vremena sa istom kružnom učestanošću i u opštem slučau različitim fazama
Kola u ustalenom prostoperiodičnom režimu svi naponi i sve strue u kolu su prostoperiodične (sinusoidalne ili kosinusoidalne funkcie vremena sa istom kružnom učestanošću i u opštem slučau različitim fazama
2.7 Primjene odredenih integrala
 . INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
. INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
a M a A. Može se pokazati da je supremum (ako postoji) jedinstven pa uvodimo oznaku sup A.
 jedinstven pa uvodimo oznaku sup A.") 3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
Linearna algebra 2 prvi kolokvij,
 1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
Pismeni dio ispita iz Matematike Riješiti sistem jednačina i diskutovati rješenja u zavisnosti od parametra a:
 Zenica, 70006 + y+ z+ 4= 0 y+ z : i ( q) : = = y + z 4 = 0 a) Napisati pavu p u kanonskom, a pavu q u paametaskom obliku b) Naći jednačinu avni koja polazi koz pavu p i okomita je na pavu q ate su pave
Zenica, 70006 + y+ z+ 4= 0 y+ z : i ( q) : = = y + z 4 = 0 a) Napisati pavu p u kanonskom, a pavu q u paametaskom obliku b) Naći jednačinu avni koja polazi koz pavu p i okomita je na pavu q ate su pave