Ariadna Lucia Pletea Adrian Corduneanu Mircea Lupan LECŢII DE ALGEBRĂ LINIARĂ
|
|
|
- Χλωρίς Αθανασιάδης
- 5 χρόνια πριν
- Προβολές:
Transcript
1 Ariadna Lucia Pletea Adrian Corduneanu Mircea Lupan LECŢII DE ALGEBRĂ LINIARĂ IASI, 005
2 1 Cuprins Capitolul Matrice şi determinanţi Determinantul unei matrice pătratice Matricea inversă Rangul unei matrice. Linii principale şi coloane principale Spaţiul vectorial real Schimbarea coordonatelor vectorului la schimbarea bazei Transformare liniarăîn V n Polinom caracteristic. Vectori proprii şi valori proprii Teorema de reprezentare spectrală Diagonalizarea unei matrice Algoritmul de diagonalizare a unei matrice Forma canonică Jordan Algoritmul de aducere la forma Jordan Autovalorile unor matrice reale simetrice Spaţiul vectorial normat Norme pe R n (n ) Spaţiul euclidian Forme liniare, biliniare şi pătratice Spaţiul liniar al vectorilor liberi Structura algebrică aspaţiului vectorilor liber Spaţiul liniar V Repere Aplicaţii la studiul conicelor şi cuadricelor...97
3 Capitolul.1. Numere complexe Transformări elementare Matrice bloc Transformări liniare Spaţii euclidiene Exponenţiala de argument matriceal Conice pe ecuaţii reduse Cercul Elipsa Hiperbola Parabola Cuadrice pe ecuaţii reduse Sfera Elipsoidul Hiperboloidul cu o pânză Hiperboloidul cu două pânze Paraboloidul eliptic Paraboloidul hiperbolic Generări de suprafeţe Generarea suprafeţelor cilindrice Generarea suprafeţelor conice Generarea suprafeţelor de rotaţie Generaratoarele rectilinii ale cuadricelor Probleme propuse Capitolul 3 Mathematica în algebră...01
4 Capitolul 1 Noţiuni teoretice 1.1 Matrice şi determinaţi Definiţia 1.1 O matrice de tipul m n este o mulţime de mn numere a ij, reale sau complexe, i = 1,m, j = 1,n, aşezate într-un tabel dreptunghiular după regula primul indice arată linia, iar al doilea arată coloana în care se află elementulrespectiv. Notăm mulţimea matricelor de ordin m n ale căror elemente sunt numere reale cu M m n (R). DacăscriemA =(a ij ) i=1,m,j=1,n aceasta reprezintă matricea A M m n (R), de forma A = a 11 a 1 a 13 a 1n a 1 a a 3 a n..... a m1 a m a m3 a mn. Dacă m = n, adică numărul liniilor este egal cu numărul coloanelor, matricea se numeşte pătrată. Notăm mulţimea matricelor cu elemente reale de ordin n n cu M n (R). Dacă matricele sunt de acelaşi tip m n, ele se pot aduna după regula element cu element. Aceasta înseamnă cădacă A =(a ij )şi B =(b ij ), atunci A + B =(a ij + b ij ) i=1,m,j=1,n.dacă α R (se foloseşte şi denumirea de scalar ), definim matricea αa, produsul dintre un scalar şi o matrice, după regula αa =(αa ij ) i=1,m,j=1,n. 5
5 6 CAPITOLUL 1. NOŢIUNI TEORETICE Matricelesenotează cu litere mari îngroşate (bold), iar scalarii se notează cu litere mici obişnuite. Dacă adunarea matricelor şi înmulţirea cu scalari a matricelor sunt operaţii simple şi par foarte naturale, înmulţirea matricelor pare artificială, cel puţin la prima vedere. În cele ce urmează, vom arăta cumseajungelaînmulţirea lor, care după cumseştie, se face după regula linie cu coloană. Presupunem că avemn variabile independente x 1, x,..., x n, iar variabilele y 1,y,..., y p depind de ele prin relaţiile liniare nx y i = b ij x j,i= 1,p. (1.1) j=1 Este evident că aiciapareîn mod natural matricea B =(b ij )detipul p n (p linii şi n coloane) care face legătura între variabilele y 1, y,..., y p şi respectiv x 1, x,..., x n.săpresupunem acum că variabilele z 1, z,..., z m depind la rândul lor după regula (transformare liniară) px z i = a ij y j,i= 1,m. (1.) j=1 Vom considera şi matricea A =(a ij )detipulm p, care face legătura între cele două rânduri de variabile y 1, y,...,y p şi respectiv z 1, z,...,z m. Putem reprezenta schematic situaţia descrisă aici,astfel x B B y notând cu B transformarea dată de formulele (1.1) şi cu A pe cea dată de formulele (1.). Deci, B şi A sunt matricele celor două transformări liniare. Transformareadelavariabilelex la variabilele z este normal să onotăm A B, amintinddenotaţia funcţiei compuse din analiza matematică. A B se va numi produsul celor două transformări A şi B. Acum urmeazăsă aflăm în mod concret cum depind variabilele z de variabilele x. Fixăm un P indice i din mulţimea 1,m şi scriem z i = p P a ij y j. Dar y j = n b jk x k, j = 1,p după cumrezultă din (1.1); evident, a trebuit să folosimunnou indice de sumare, deoarece i afostfixatîn prima formulă, iar j afostşi el fixat când am reprodus formula (1.1), care ne dă valoarealuiy j.putem deci scrie à px px nx! px nx z i = a ij y j = a ij b jk x k = a ij b jk x k, (1.3) j=1 j=1 k=1 j=1 k=1 A A z j=1 k=1
6 1.1. MATRICE ŞI DETERMINAŢI 7 unde am folosit pentru prima dată simbolul sumei duble (adică cudoiindici de sumare) PP. În suma dublă, cei doi indici de sumare iau independent unul de altul toate valorile prescrise (j de la 1 la p, k de la 1 la n) şi deci putem fixa pe k şi da lui j pe rând toate valorile, sumele obţinute depinzând de k şi trebuind apoi să fiesumate,dând lui k toate valorile de la 1 la n. Pe scurt, putem schimba în (1.3) ordinea à de sumare, scriind nx px! z i = a ij b jk x k (1.4) k=1 valabilă pentrui =1,,...,m. Dacă facem notaţia c ik = j=1 p P j=1 a ij b jk pentru fiecare i 1,m şi fiecare k 1,n, putem scrie (1.4) în forma nx nx z i = c ik x k sau z i = c ij x j,i= 1,m (1.5) k=1 deoarece nu are importanţă cumsenotează indicele de sumare (indice mut). Dar c ij este ceea ce se numeşte produsul liniei i din A cu coloana j din B. Prin definiţie, matricea C =(c ij ) de tipul m n se numeşte produsul celor două matrice şi se notează AB. Dacăfacemlegătura cu produsul A B al celor două transformări de variabile, putem enunţa pe scurt: matricea produsului este egală cu produsul matricelor. Pentru a putea fi înmulţite două matrice, trebuie ca numărul de coloane din prima să fie egal cu numărul de linii din a doua. Din înmulţireaadouă matrice de tip m p şi respectiv p n, rezultă o matrice de tipul m n. Se impun câteva observaţii: în cazulmatricelorpătrate de acelaşi tip n n (se mai spune de ordinul n ) înmulţirea nu este, în general, comutativă. Adică sepotgăsi oricând două matrice A şi B, astfelîncât AB 6= BA, egalitatea având loc numai în cazuri particulare. Se poate însă arăta asociativitatea produsului a trei matrice A, B, C adică egalitatea (AB) C = A (BC), nu numai în cazul matricelor de acelaşi ordin, dar şi în cazul când aceste produse se pot face, adică atuncicând prima este de tipul m p, a doua de tipul p q şi a treia de tipul q n. În cazul matricelor pătrate, se cunoaşte existenţa matricei unitate, notată I, careesteelement neutru la înmulţire. I este matricea care are 1 pe toată diagonala principală şi 0 în rest.avemai = IA = A, A M n (R). Transpusa unei matrice A =(a ij )detipm n se noteazăcua T = aij 0, unde a 0 ij = a ji, i = 1,n, j = 1,m. Liniile transpusei sunt coloanele matricei A, iar coloanele transpusei sunt liniile matricei A. Matricele A şi A T sunt transpuse una alteia, adică A T T = A. j=1
7 8 CAPITOLUL 1. NOŢIUNI TEORETICE Exerciţiul 1.1 Dacă A M m n (R)şi B M n p (R) (se poate efectua produsul), să searatecă(ab) T = B T A T. Altfel spus, transpusa produsului este egală cu produsul transpuselor în ordineinversă. Un prim avantaj în folosirea matricelor se poate vedea chiar în scrierea formulelor (1.1), (1.) şi (1.5). Dacănotăm prin x, y şi z matriceledateprin x = x 1 x n T, y = y 1 y n T şi z = z 1 z n T,formulele date le putem scrie în forma prescurtată y = Bx, z = Ay, respectiv z = A (Bx)=(AB) x. În teoria sistemelor diferenţiale, scrierea matriceală se foloseşte cu succes, căci un sistem diferenţial liniar omogen cu coeficienţi constanţi de forma ẏ 1 (t) =a 11 y 1 (t)+a 1 y (t)+ + a 1n y n (t) ẏ (t) =a 1 y 1 (t)+a y (t)+ + a n y n (t)... ẏ n (t) =a n1 y 1 (t)+a n y (t)+ + a nn y n (t) poate fi scris prescurtat în formaẏ (t) = Ay (t). Aici A = (a ij )este matricea constantă deordinuln acoeficienţilor a ij a sistemului diferenţial iar y (t) este matricea coloană afuncţiilor necunoscute y i (t), dată prin y (t) = y 1 (t) y n (t) T,iarẏ(t) este matricea coloană (detipn 1) dată prinẏ (t) = ẏ 1 (t) ẏ n (t) T,formată cu derivatele funcţiilor y i (t), i = 1,n Determinantul unei matrice pătrate Fiecărei matrice pătrate A, cu elemente reale sau complexe, i se ataşează un număr, numit determinantul ei, notat det(a). Determinantul unei matrice A =(a ij )deordinuln se notează şi prin simbolul grafic a 11 a 1 a 13 a 1n a 1 a a 3 a n..... a n1 a n a n3 a nn Prin definiţie, determinantul unei matrice A de ordinul doi, µ a11 a A = 1 a 1 a.
8 1.1. MATRICE ŞI DETERMINAŢI 9 este dat de egalitatea det(a) =a 11 a a 1 a 1. În acest caz, se pot verifica uşor toate proprietăţile determinanţilor, cunoscute din liceu. Dacă A este o matrice de ordinul trei, A = a 11 a 1 a 13 a 1 a a 3 a 31 a 3 a 33 atunci det(a) secalculeazădupăregula a det(a) =a a 3 11 a 3 a 33 a 1 a1 a 3 a 31 a 33 + a 13 a1 a a 31 a 3, deci se reduce la calcularea unor determinanţi de ordinul doi. Se poate vedea că determinanţii deordinuldoicareaparîn egalitatea precedentă, se obţin din det(a) prin tăierea liniei întâia şi a coloanei corespunzătoare indicelui al doilea al elementelor din linia întâia şi am putea scrie det(a) = ( 1) 1+1 a a a 3 11 a a 3 a 33 +( 1)1+ a 1 a 3 1 a 31 a ( 1) 1+3 a a 1 a 13 a 31 a 3. Dacă extindemaceastăregulăladeterminanţi de ordinul patru, rezultă că obţinerea lor se reduce la calcularea unor determinanţi de ordinul trei şi căîn general, calcularea unor determinanţi de ordinul n se reduce la calcularea unor determinanţi de ordinul n 1. Cu alte cuvinte, putem calcula determinanţi de orice ordin. Dacă facemnotaţiile A 11 = ( 1) 1+1 a a 3 a 3 a 33,A 1 =( 1) 1+ a 1 a 3 a 31 a 33, A 13 = ( 1) 1+3 a 1 a a 31 a 3, putem scrie det(a) =a 11 A 11 + a 1 A 1 + a 13 A 13 şi atunci avem dezvoltarea determinantului după elementele primei linii. Numerele A 11, A 1, A 13 se numesc complemenţii algebrici ai elementelor din prima linie. În terminologia engleză, complemenţii algebrici se numesc cofactori. În general, dacă A =(a ij ) este o matrice oarecare de ordinul n, pentru orice element a ij din det(a), se defineşte complementul său algebric A ij =( 1) i+j d ij, unde d ij este valoarea determinantului de ordinul n 1,
9 10 CAPITOLUL 1. NOŢIUNI TEORETICE obţinut prin suprimarea liniei i şi coloanei j. Fapt cu totul remarcabil, se poate demonstra că det(a), definit aşa cum s-a spus, adică folosind dezvoltarea după elementele primei sale linii, se poate obţine în n moduri prin dezvoltarea după elementeleoricărei linii şi în n moduri prin dezvoltarea după elementeleoricărei coloane, adicăavem P det(a) = n a ij A ij, i = 1,n j=1 P det(a) = n (1.6) a ij A ij, j = 1,n. i=1 Dacăînlocuim linia k cu linia i (i 6= k), celelalte linii rămânând neschimbate, se obţine un determinant nul (două linii identice). Dezvoltând noul determinant după linia k şi ţinând seama că complemenţii algebrici ai elementelor acestei linii nu s-au schimbat, obţinem că nx a ij A kj =0, dacă i 6= k, i, k = 1,n. (1.7) j=1 Altfel spus, dacă înmulţim elementele unei linii cu complemenţii algebrici ai elementelor altei linii şi sumăm, obţinem zero. Aceeaşi concluzie are loc şi relativ la coloane, adică nx a ij A ik =0, dacă j 6= k, j, k = 1,n. (1.8) i=1 Putem introduce o regulă generală de calcul a unui determinant. Pentru aceasta introducem unele noţiuninoi.dacă p n, numim minor de ordinul p al matricei A determinantul de ordinul p format cu elementele situate la intersecţia a p linii şi p coloane ale matricei A. Dacă i 1 <i <...<i p şi j 1 <j <...<j p sunt p linii şi respectiv p coloane ale matricei A, atunci minorul de ordin p corespunzător liniilor i 1,i,..., i p şi coloanelor j 1,j,..., j p este M = a i1 j 1 a i1 j... a i1 j p a i j 1 a i j... a i j p a ipj 1 a ipj... a ipj p Numim minor complementar al minorului M de ordin p al matricei A, determinantul M c de ordinul n p al matricei extras din A prin suprimarea celor p linii şi p coloane corespunzătoare lui M..
10 1.1. MATRICE ŞI DETERMINAŢI 11 Minorii de ordinul 1 ai matricii A sunt elementele sale, a ij. Minorii complementari ai acestora sunt determinanţi de ordinul n 1. Numim complement algebric al minorului M al matricei A elementul definit de C =( 1) s M c, unde s =(i 1 + i i p )+ (j 1 + j j p ), adică suma indicilor liniilor şi coloanelor matricei A utilizate în M. Determinantul matricei pătratice de ordinul n 1careseobţine din A prin suprimarea liniei i şi coloanei j se numeşte minorul complementar al elementului a ij şi se notează cud ij.numărul A ij =( 1) i+j d ij este tocmai complementul algebric al elementului a ij. Teorema 1.1 (Teorema lui Laplace) Determinantul matricei A este egal cu suma produselor minorilor de ordinul p ce se pot construi cu elementele a p linii (coloane) fixate ale matricei A prin complemenţii lor algebrici. Exerciţiul 1. Să se calculeze valoarea determinantului a 11 a 1 a 13 a 14 D= a 1 a a 3 a 4 a 31 a 3 a 33 a 34. a 41 a 4 a 43 a 44 folosind regula lui Laplace si dezvoltându-l după primeledouă linii. Rezolvare. Folosind teorema lui Laplace obţinem: D = a11 a 1 a 1 a a 33 a 34 ( 1)1++1+ a 43 a 44 + a11 a 13 a 1 a 3 ( 1) a 3 a 34 a 4 a 44 + a11 a 14 a 1 a 4 a 3 a 33 ( 1) a 4 a a1 a 13 a a 3 a 31 a 34 ( 1)1+++3 a 41 a 44 + a1 a 14 a a 4 ( 1) a 31 a 33 a 41 a 43 + a13 a 14 a 3 a 4 a 31 a 3 ( 1) a 41 a 4. Ca aplicaţie a regulii lui Laplace să calculăm determinantul produsului adouămatricepătratice. Exerciţiul 1.3 Fie A, B M n (R). Să se arate că determinantul produsului matricelor A şi B este egal cu produsul determinanţilor celor două matrice, adică det(ab) =det(a)detb.
11 1 CAPITOLUL 1. NOŢIUNI TEORETICE Rezolvare Fie A =(a ij ), B =(b ij ), C = AB =(c ij ), cu nx c ik = a ij b jk, i,k = 1,n. (1.9) j=1 Construim matricea pătratică deordinuln a 11 a 1... a 1n a 1 a... a n µ P = a n1 a n... a nn A b 11 b 1... b 1n = I B b 1 b... b n b n1 b n... b nn Dezvoltând determinantul matricei P, folosind teorema lui Laplace după primele n linii, obţinem det P =det(a)detb. Pe de altă parte, matricea P poate fi transformată, fără amodifica valoarea determinantului ei, folosind proprietăţile determinanţilor astfel încât la intersecţia ultimelor n linii şi n coloane să obţinem zerouri. Pentru aceasta este suficient ca la elementele coloanei n + k să adunăm elementele corespunzătoare ale primelor n coloane înmulţite respectiv cu b 1k, b k,..., b nk, pentru k = 1,n.Ţinând seama de (1.9), matricea P devine Q = a 11 a 1... a 1n c 11 c 1... c 1n a 1 a... a n c 1 c... c n a n1 a n... a nn c n1 c n... c nn = µ A C I 0 Dezvoltând determinantul matricei Q, folosind Teorema lui Laplace, după ultimele n linii, obţinem det Q =( 1) n(n+1) det C =detc. Cum det P =detq, deducem că det(a)b =det(a)detb Matricea inversă Dacă A =(a ij ) este o matrice de ordinul n, notăm prin A = a ij matricea cu elementele a ij = A ji, i, j = 1,n,adică A este transpusa matricei formată cu complemenţii algebrici ai elementelor din determinantul..
12 1.1. MATRICE ŞI DETERMINAŢI 13 matricei A. Ţinând seama de relaţiile (1.6), (1.7) şi (1.8), avem AA = A A =(det(a)) I n (1.10) unde I n este matricea unitate de ordinul n. Dacădet(A) 6= 0, matricea A se numeşte nesingulară. Notând A 1 1 = det(a) A, din (1.10) rezultă că A 1 = AA 1 = A 1 A = I n, (1.11) adică A 1 este elementul invers al lui A (faţă deoperaţia de înmulţire amatricelor) înmulţimea matricelor nesingulare de ordinul n, care deci formează un grup necomutativ. Cu notaţiile introduse, putem scrie A 11 A 1 A n1 A 1 A A n 1 det(a)..... (1.1) A 1n A n A nn Exerciţiul 1.4 (Regula lui Cramer) Să considerăm sistemul liniar algebric (n ecuaţii cu n necunoscute) a 11 x 1 + a 1 x + + a 1n x n = b 1 a 1 x 1 + a x + + a n x n = b... a n1 x 1 + a n x + + a nn x n = b n (1.13) care poate fi scris în forma matriceală Ax = b, în carea =(a ij )este matrice de ordinul n, iarx şi b sunt matrice-coloană detipn 1, date prin x = T T x 1 x x n, respectiv b = b1 b b n. Dacă presupunem det(a) 6= 0, matricea A este inversabilă, inversa ei este A 1, şi obţinem x = A 1 A x = A 1 (Ax) =A 1 b, adică x = A 1 b. (1.14) Pe de altă parte, dacăîn ecuaţia Ax = b punem x = A 1 b A A 1 b = AA 1 b = I n b = b (1.15) x = A 1 b este în adevăr soluţia unică aecuaţiei date. Din egali- adică tatea
13 14 CAPITOLUL 1. NOŢIUNI TEORETICE deducem x i = x i = 1 det(a) A1i A i A ni 1 det(a) (b 1A 1i + b A i + + b n A ni )= b 1 b. b n,i= 1,n (1.16) d i det(a),i= 1,n (1.17) în cared i este valoarea determinantului care se obţine din det(a), prin înlocuirea coloanei i cu coloana termenilor liberi b 1, b,..., b n Rangul unei matrice. Linii principale şi coloane principale Definiţia 1. Fie A =(a ij ) omatricedetipm n. Matricea A are rangul r, dacă există un minor de ordinul r construit cu elementele matricei, care să fie nenul şi toţi minoriideordinmaimaredecât r, dacăexistă, să fie nuli. Dacă A are măcar un element diferit de zero, rangul său, notat r (A), satisface inegalitatea 1 r (A) min {m, n}. Singura matrice care are rangul zero, este matricea cu toate elementele zero. Dacă r (A) =r 1, alegem un minor de ordinul r, diferit de zero şi liniile sale le vom numi linii principale, iar coloanele sale se vor numi coloane principale. Evident, aceste denumiri depind de minorul ales, care dă rangul matricei. Pentru simplificarea scrierii, fără amicşora generalitatea, putem presupune că acest minor este cel din colţul de stânga sus al matricei A: A = a 11 a 1 a 1r a 1j a 1n a 1 a a r a j a n a r1 a r a rr a rj a rn a i1 a i a ir a ij a in a m1 a m a mr a mj a mn. (1.18) Teorema 1. Orice linie a unei matrice este combinaţie liniară de liniile principale şi orice coloană este combinaţie liniară de coloanele principale.
14 1.1. MATRICE ŞI DETERMINAŢI 15 Demonstraţie. Fixăm linia i (i > r)şi considerăm toţi determinanţii de forma a 11 a 1 a 1r a 1j a 1 a a r a j....., j = 1,n. (1.19) a r1 a r a rr a rj a i1 a i a ir a ij Toţi aceşti n determinanţi sunt nuli: dacă 1 j r, eiaudouăcoloane identice; dacă j>rei sunt minori de ordinul r+1 din A, decisuntşi ei nuli, deoarece au ordinul mai mare decât r = r (A). Deoarece primele r coloane rămân fixate, complemenţii algebrici ai elementelor din ultima coloană nu depind de această coloană. Notând aceşti complemenţi algebrici (cofactori) cu α 1,α,...,α r,α r+1 şi dezvoltând (pentru j fixat) după elementele ultimei coloane, găsim α 1 a 1j + α a j + + α r a rj + α r+1 a ij =0,j = 1,n (1.0) unde constantele α k nu depind de j (odată cei afostfixat)şi α r+1 6=0. Notând c k = α k, k = 1,r,găsim α r+1 a ij = c 1 a 1j + c a j + + c r a rj, j = 1,n. (1.1) Aceasta ne spune că linia i (i afostfixat)estecombinaţie liniară de primele r linii (liniile principale în det(a)). Evident, aceste constante depind totuşi de linia fixată i. Relativ la coloane: dacă în (1.19) presupunem j fixat şi i variabil, complemenţii algebrici ai elementelor din ultima linie nu depind de i. Dezvoltând (1.19) după ultima linie, avem β 1 a i1 + β a i + + β r a ir + β r+1 a ij =0,i= 1,m (1.) unde β k nu depind de i (j afostfixat)şi β r+1 6=0. Defapt,β r+1 = α r+1. Notând λ k = β k, k = 1,r,avem β r+1 a ij = λ 1 a i1 + λ a i + + λ r a ir, i = 1,m (1.3) adică coloanaj (j afostfixatîn acestraţionament) este combinaţie liniară de coloanele principale. Evident, constantele λ 1, λ,..., λ r depind de coloana fixată. În formă matriceală, formulele (1.3) se scriu
15 16 CAPITOLUL 1. NOŢIUNI TEORETICE a 1j a j. a ij. a mj = λ 1 a 11 a 1. a i1. a m1 + λ a 1 a. a i. a m + + λ r a 1r a r. a ir. a mr. (1.4) Observaţia 1.1 Evident, primele linii sunt şi ele combinaţii de liniile principale. Enunţ asemănător şi pentru primele coloane. De exemplu, prima coloană (j =1)seobţine din (1.3) pentru λ 1 =1,λ = λ 3 = = λ r =0. Astfel, afirmaţia din enunţul teoremei se referă la toate liniile şi la toate coloanele matricei oarecare A. Teorema 1.3 (Teorema lui Rouché) Compatibilitatea unui sistem algebric liniar este echivalentă cu anularea tuturor determinanţilor caracteristici. Demonstraţie. Să considerăm acum sistemul liniar de m ecuaţii cu n necunoscute a 11 x 1 + a 1 x + + a 1n x n = b 1 a 1 x 1 + a x + + a n x n = b... a m1 x 1 + a m x + + a mn x n = b m (1.5) care poate fi scris în forma matriceală Ax = b, unde A =(a ij )esteo matrice de ordinul m n, b este o matrice-coloanădetipm 1, definităprin b = T b 1 b b m, x este o matrice-coloană detipn 1, de forma x = T x 1 x x n. Presupunem r (A) =r (1 r min {m, n}) şi presupunem că minorul de ordin r din colţul de stânga-sus este diferit de zero. Numim determinanţi caracteristici ai sistemului, toţi determinanţii de forma a 11 a 1 a 1r b 1 a 1 a a r b....., i = r +1,r+,...,m. a r1 a r a rr b r (1.6) a i1 a i a ir b i Dacă toţi aceşti determinanţi sunt egali cu 0, îi dezvoltăm după ultima linie şi rezultă: coloana termenilor liberi (matricea b) este combinaţie liniară
16 1.1. MATRICE ŞI DETERMINAŢI 17 de primele coloane, adică existănişte constante λ 1, λ,..., λ r astfel încât să avem b 1 b. b m = λ 1 a 11 a 1. a m1 + λ a 1 a. a m + + λ r a 1r a r. a mr. (1.7) Aceasta înseamnă căpunând x 1 = λ 1, x = λ,..., x r = λ r, x i =0 pentru i > r, avemosoluţie a sistemului (1.5), deci acest sistem este compatibil. Reciproc, să presupunem că sistemul (1.5) este compatibil, adică are cel puţin o soluţie, pe care să onotăm x 0 1, x 0,..., x 0 n. Scriind în formă matriceală căaceastăsoluţie verifică sistemul (1.5), obţinem b 1 a 11 a 1 a 1r b a 1 a a r. b m = x0 1. a m1 + x0. a m + + x0 n. a mr, (1.8) adică coloana b este combinaţie liniară de coloanele matricei A, carela rândul lor sunt combinaţii liniare de coloanele principale (care în cazul de faţă suntprimeler coloane din A). În concluzie, b este o anumită combinaţie de coloanele principale, deci toţi determinanţii caracteristici (1.6) sunt nuli. Teorema 1.4 Anularea unui determinant este echivalentăcufaptulcăîntre coloanele sale există o dependenţă liniară. Demonstraţie. După cumseştie, dacă între coloanele unui determinant există o combinaţie liniară (echivalent, una dintre ele se exprimă liniar în funcţie de celelalte), acest determinant este nul. Însă şi reciproca este adevărată: dacă un determinant este nul, atunci între coloanele sale există o dependenţă liniară. În adevăr, fie det(a) = 0, unde A =(a ij )esteo matrice de ordinul n. Atunci, avem r (A) < n, decinumărul coloanelor principale este mai mic decât n (acest număr este n 1). Prin urmare, există măcar o coloană carenuesteprincipalăşi aceasta se exprimă cao combinaţie liniară dealtecoloane. Se mai poate spune şi altfel: necesar şi suficient ca un determinant să fienul, estecaîntre coloanele sale să existeodependenţă liniară. Desigur, propoziţii asemănătoare se pot enunţa şi relativ la liniile unui determinant.
17 18 CAPITOLUL 1. NOŢIUNI TEORETICE 1. Spaţiul vectorial real Definiţia 1.3 Se numeşte spaţiu vectorial peste corpul real R, (spaţiu liniar real) o mulţime V de elemente pe care se definesc două operaţii şi anume: adunarea elementelor lui V şi înmulţirea cu scalari (corpul numerelor reale) ale elementelor lui V. Operaţia de adunare o vom nota prin simbolul + (plus). Adunareaesteooperaţie internă, adică definită pe V cu valori în V, în timpceînmulţirea cu scalari este definită per V cu valori în V. ElementeleluiV se numesc vectori. Adunarea satisface următoarele axiome: 1 este comutativă: x + y = y + x, x, y V, este asociativă: x+(y + z)=(x + y)+z, x, y, z V, 3 există element neutru θ V: x + θ = x, x V, 4 x V, există un element, numit opusul său şi notat cu x, astfel încât x +( x) =θ. Faţă deaceastăoperaţie, V este un grup aditiv comutativ. Faţă de înmulţirea cu scalari, V satisface axiomele: 5 α (x + y) =αx + αy, α R şi x, y V, 6 (α + β) x = αx + βx, α, β R şi x V, 7 α (βx) =(αβ) x, α, β R şi x V, 8 1 x = x, x V. (Prin1 x am înţeles produsul dintre numărul 1 şi vectorul x.) Exemplul 1.1 Spaţiul vectorial aritmetic real R n. Fie R n = R R R (produsul cartezian a lui R de n ori). Vom nota prin x un element oarecare din R n ; acesta este o n-uplă ordonată denumererealeşi vom scrie x = x 1 x x n, unde xi R pentru i = 1,n. Adunarea pe R n se defineşte prin regula x + y = x 1 + y 1 x + y x n + y n, x, y R n, iar înmulţirea cu scalari prin regula αx = αx 1 αx αx n, α R şi x R n. R n are structură despaţiu liniar. Exemplul 1. Spaţiul vectorial R n. Notăm cu R n mulţimea ale cărei elemente sunt matrice-coloană detipn 1, cu elemente reale. Un element oarecare (vector) din acest spaţiu, se scrie astfel x 1 x x =., cu x i R pentru i = 1,n. x n
18 1.. SPAŢIUL VECTORIAL REAL 19 Adunarea şi înmulţirea cu scalari se definesc în modevident. Vom prefera să lucrăm cu acest spaţiu în celeceurmează. Vectorul x îl vom preciza prin relaţia x = T x 1 x x n, din motive grafice. Analog se poate introduce spaţiul liniar real C n. Definiţia 1.4 Mulţimea X V se numeşte subspaţiu al spaţiului vectorial V, dacă X este un spaţiu liniar în raportcuoperaţiiledeadunareavectorilor şi înmulţire cu scalari a vectorilor mulţimii V. Teorema 1.5 (Teorema de caracterizare a subspaţiilor liniare) Condiţia necesară şi suficientă ca X V să fie un subspaţiu liniar a spaţiului V este: a) x, y X : x + y X, b) α R, x X : α x X. Demonstraţie. Necesitatea. Presupunem că X este un spaţiu liniar. Rezultăcă X este închis înraportcuoperaţiile de adunare a vectorilor şi înmulţire cu scalari a acestora. Suficienţa. Presupunem a) şi b) îndeplinite, ceea ce înseamnă că X este închis în raportcuoperaţiile de adunare a elementelor lui şi de înmulţire la stânga cu elemente din corpul de scalari real. Proprietăţile de asociativitate şi axiomele 5, 6, 7, 8suntsatisfăcute pe V, deci cu atât mai mult sunt satisfăcute pe X V. Demonstrăm că x X x X şi θ X. Pentru x X rezultă, considerând în b)α = 1 rezultă α x = x X; utilizând a) cu y = x obţinem x +( x) =θ X. Definiţia 1.5 Fie X 1, X două subspaţii ale spaţiului liniar V. Definim X 1 \ X = {v v X 1 şi v X } X 1 [ X = {v v X 1 sau v X } Teorema 1.6 Fie X 1, X două subspaţii ale spaţiului liniar V. Intersecţia X 1 T X este un subspaţiu liniar al spaţiului liniar V. Demonstraţie. Observăm că X 1 T X 6= deoarece θ X i, i {1, } rezultă că θ X 1 T X. Pentru x, y X 1 X, rezultă x + y X 1 şi x + y X,decix + y X 1 X.Deasemenea α R şi x X 1 X αx X 1 şi αx X şi deci αx X 1 T X.Rezultă, conform Teoremei 1.5 de caracterizare a subspaţiilor liniare, că X 1 T X este un subspaţiu liniar.
19 0 CAPITOLUL 1. NOŢIUNI TEORETICE Observaţia 1. Reuniunea unui sistem de subspaţii liniare nu este un subspaţiu liniar. Ca exemplu considerăm X 1 = {(x 1, 0) (x 1, 0) R }, X = {(0,x ) (0,x ) R }. Dacă considerăm x = (1, 0) X 1 şi y = (0, 1) X, x, y X 1 X,darx + y / X 1 X. Definiţia 1.6 Fie X 1, X două subspaţii ale spaţiului liniar V. Se numeşte suma subspaţiilor X 1, X mulţimea definită prin X = X 1 + X = {x V x = x 1 + x, x 1 X 1, x X }. Teorema 1.7 Suma subspaţiilor X 1, X ale spaţiului liniar V, X = X 1 +X, este un subspaţiu liniar al lui V. Demonstraţie. Observăm că X 6= deoarece θ + θ X. Fie α R şi x, y X astfel încât x = x 1 + x, y = y 1 + y, x 1, y 1 X 1, x, y X, atunci α x+y = α (x 1 +x )+(y 1 +y )=(αx 1 +y 1 )+(αx +y ) X 1 +X, deoarece X i,i=1, sunt subspaţii liniare Definiţia 1.7 Fie X 1, X două subspaţii ale spaţiului liniar V. Dacă X = X 1 +X şi X 1 X = {θ} atunci L X se numeşte suma directă asubspaţiilor X 1, X şi se notează V = V 1 Vi. Dacă V este un spaţiu vectorial oarecare, vom nota prin v, v (1), v (),... vectorii din acest spaţiu. Definiţia 1.8 Spunem că unvectorv X este o combinaţie liniară a vectorilor v (1), v (),...,v (n)ª dacă există c 1,c,...,c n R astfel încât nx v = c 1 v (1) + c v () c n v (n) = c i v (i). Dacă notăm B = v (1), v (),...,v (n)ª atunci mulţimea combinaţiilor liniare a acestor vectori se notează[b]. Se demonstrează că[b] este subspaţiu subspaţiu liniar. Definiţia 1.9 Vectorii v (1), v (),..., v (m) se numesc liniar independenţi, dacărelaţia c 1 v (1) + c v () + + c m v (m) = θ este adevărată numai dacă c 1 = c = = c m =0. În caz contrar, ei se numesc liniar dependenţi. Dependenţa liniară este echivalentă cu faptul că în sistemul dat de vectori, există măcar unul care este combinaţie liniară de ceilalţi. i=1
20 1.. SPAŢIUL VECTORIAL REAL 1 Definiţia 1.10 Dacă în V există n vectori liniar independenţi, dar orice sistem de m vectori cu m>neste liniar dependent, spunem că V este finit dimensional şi are dimensiunea n. În acest caz, se poate scrie V n înlocde V. Drept exemple de spaţii n-dimensionale sunt R n şi R n. Definiţia 1.11 Într-un spaţiu V n, orice sistem de n vectori liniar independenţi se numeşte bază. Teorema 1.8 Fie v (1), v (),...,v (n)ª este o bază în spaţiul vectorial V n. Orice vector v V n se scrie în moduniccaocombinaţie liniarădevectorii bazei. Demonstraţie. Fie relaţia de forma c 1 v (1) + c v () + + c n v (n) + cv = θ şi demonstrăm că nutoţi coeficienţii sunt nuli. Dacă c = 0 atunci rezultă că c 1 v (1) + c v () + + c n v (n) = θ şi deoarece v (1), v (),...,v (n)ª sunt vectori liniar independenţi, rezultă toţi c i =0, ceea ce ar contrazice faptul că numărul maxim de vectori liniar independenţi este n. Deci c 6= 0. Dacă notăm α i = c i c, i = 1,ngăsim v = α 1v (1) +α v () + +α n v (n) şi această scriere este unică. În adevăr, dacăamaveaşi v = β 1v (1) +β v () + +β n v (n) ar rezulta (β 1 α 1 ) v (1) +(β α ) v () + +(β n α n ) v (n) = θ, care implică β i = α i, i = 1,n. Numerele (scalarii) α 1, α,..., α n se numesc coordonatele lui v înraport cu baza aleasă. Dacă se alege o altă bază, coordonatele unui vector se vor schimba (vor fi diferite de cele din prima bază). Observaţia 1.3 În aplicaţii demonstăm că n vectori formează obazădacă sunt liniar independenţi şi dacă orice vector din spaţiu se poate scrie ca o combinaţie liniară a acestor vectori. Dacă se cunoaşte dimensiunea spaţiului dim V = n, atunci pentru a arăta că n vectori formează obazăestesuficient să arătăm că sunt liniar independenţi. Exemplul 1.3 În spaţiul vectorial Rn considerăm vectorii {e 1, e,..., e n } unde e 1 = , e = ,..., e n = (1.9) Aceşti vectori sunt liniar independenţi deoarece din orice relaţie de forma c 1 e 1 + c e c n e n = θ rezultă α i =0, i = 1,n.
21 CAPITOLUL 1. NOŢIUNI TEORETICE Pe de altă parte, pentru orice x =(x 1,x,...,x n ) R n avem scrierea x = x x xn = x 1 e 1 +x e +...+x n e n şi această scriere este unică. Vectorii {e 1, e,..., e n } formează baza standard (naturală) din R n Schimbarea coordonatelor vectorului la schimbarea bazei Într-un spaţiu V n,considerăm două bazeb = v (1), v (),...,v (n)ª şi B 0 = u (1), u (),...,u (n)ª. Ele sunt legate prin relaţiile u (1) = c 11 v (1) + c 1 v () + + c n1 v (n) u () = c 1 v (1) + c v () + + c n v (n) (1.30)... u (n) = c 1n v (1) + c n v () + + c nn v (n) în care determinantul coeficienţilor este diferit de zero (exerciţiu). Dacă un vector oarecare v se scrie descompus după cele două baze în forma v = ξ 1 v (1) + ξ v () + + ξ n v (n), v = η 1 u (1) + η u () + + η n u (n) (1.31) legătura între coordonatele ξ şi coordonatele η este ξ 1 = c 11 η 1 + c 1 η + + c 1n η n ξ = c 1 η 1 + c η + + c n η n ξ... i = ξ n = c n1 η 1 + c n η + + c nn η n sau înformă matriceală ξ 1 ξ. = ξ n c 11 c 1 c 1n c 1 c c n.... c n1 c n c nn nx c ij η j,i= 1,n j=1 η 1 η. η n (1.3) (1.33) unde C =(c ij ), i, j = 1,nse numeşte matricea schimbării de bază de la baza B la baza B 0. S-au exprimat coordonatele vechi, în funcţiedecelenoi. Prin înmulţire cu matricea C 1,putemobţine şi coordonatele noi, în funcţie de cele vechi.
22 1.3. TRANSFORMARE LINIARĂ ÎN V N 3 Exemplul 1.4 În R 3 considerăm baza canonică şi altă bază e (1) = 1 0, e () = , e (3) = (1.34) u (1) = 1 0, u () = 1 1, u (3) = 1 1. (1.35) Un vector oarecare x, dat prin x = T x 1 x x 3 se scrie în prima bază x = x 1 e (1) + x e () + x 3 e (3), iar în a doua x = η 1 u (1) + η u () + η 3 u (3). Legătura între coordonate va fi următoarea x 1 = η 1 + η + η 3, x = η + η 3, x 3 = η 3. Se pot exprima uşor şi coordonatele noi în funcţie de cele vechi. Matricea schimbării de bază delabaza e (1), e (), e (3)ª la baza u (1), u (), u (3)ª este iar coordonatele vectorului x în raportcubaza e (1), e (), e (3)ª în funcţie de coordonatele vectorului în raport cu baza u (1), u (), u (3)ª sunt date de relaţia x η 1 x = η x η 3 Definiţia 1.1 Două bazeb = {e 1, e,..., e n } şi B 0 = {e 0 1, e 0,..., e 0 n} din spaţiul vectorial V n, se numesc baze la fel orientate dacă determinantul matricei schimbării de bază delabazab la B 0 este pozitiv. Dacă acest determinant este negativ, cele două baze se numesc contrar orientate. 1.3 Transformare liniarăîn V n Definiţia 1.13 O transformare (aplicaţie) liniară f : V n V n este o funcţie care satisface proprietăţile a) f (x + y) =f (x)+f (y), x, y V n (1.36) b) f (αx) =αf (x), α R, x V n. Se obţine à prin inducţie relaţia m! X mx f c i x (i) = c i f x (i), c i R, x (i) V n,i= 1,m. i=1 i=1 (1.37)
23 4 CAPITOLUL 1. NOŢIUNI TEORETICE Observaţia 1.4 Dacă în Definiţia 1.13, a) înlocuim x = y = θ obţinem f(θ) =f(θ)+f(θ), de unde rezultă că f(θ) =θ, (1.38) Condiţia (1.38) este doar o condiţie necesară ca o aplicaţie să fie liniară. De aici rezultă cădacă f(θ) 6= θ atunci f nu este liniară. Fie bază oarecare v (1), v (),...,v (n)ª în V n. Pentru a exprima vectorul f (x), trebuie să cunoaştem imaginile vectorilor bazei. Astfel, se presupun cunoscuţi coeficienţii (scalari) în relaţiile f v (1) = a 11 v (1) + a 1 v () + + a n1 v (n), f v () = a 1 v (1) + a v () + + a n v (n), (1.39)... f v (n) = a 1n v (1) + a n v () + + a nn v (n). Notând x = ξ 1 v (1) +ξ v () + +ξ n v (n) şi f (x) =η 1 v (1) +η v () + + η n v (n),vomputeascrie Ã! np P f (x) =f ξ j v (j) = n ξ j f µ v (j) P = n n P ξ j a ij v (i) = j=1 j=1 j=1 i=1 Ã! P = n np P a ij ξ j v (i) = n np P a ij ξ j v (i) = n η i v (i), (1.40) j=1 i=1 i=1 j=1 schimbând ordinea de sumare în sumadublăceapareaici. Ţinând seama de unicitatea descompunerii unui vector după obazădată, rezultă η i = np a ij ξ j, i = 1,n. Matricea A =(a ij )deordinuln se numeşte matricea j=1 transformării liniare f, relativ la baza aleasă v (1), v (),...,v (n)ª.legătura între coordonatele vectorului curent x şi ale transformatului său y = f (x) este dată matriceal prin relaţia η 1 η. η n = a 11 a 1 a 1n a 1 a a n.... a n1 a n a nn i=1 ξ 1 ξ. ξ n. (1.41) Evident, dacă fixăm în V oaltăbază u (1), u (),...,u (n)ª,transformării f îi va corespunde acum o altă matrice, notată B. Ne propunem să aflăm legătura dintre matricele A şi B. Pentru aceasta trebuie să ştim legătura
24 1.3. TRANSFORMARE LINIARĂ ÎN V N 5 dintre cele două bazeşi vom presupune din nou că estedatăderelaţiile (1.30). Dacă notăm cu ξ i, i = 1,n coordonatele unui vector oarecare x în prima bază şi cu ξi, 0 i = 1,n coordonatele sale în a doua bază, legătura dintre ele se exprimă cumatriceaschimbării de bază C =(c ij ). La fel pentru vectorul y = f (x), coordonatele sale în primabazăsuntη i, i = 1,n, iar în a doua bază lenotăm cu ηi, 0 i = 1,n. Din relaţiile scrise în forma matriceală ξ 1 ξ. ξ n = C ξ 0 1 ξ 0. ξ 0 n η 1 η. η n, η 1 η. η n = A = C ξ 1 ξ. ξ n η 0 1 η 0. η 0 n şi (1.4) obţinem imediat că η 0 1 η 0. η 0 n = C 1 AC ξ 0 1 ξ 0. ξ 0 n, (1.43) de unde rezultă că matricea transformării liniare f în a doua bază este B = C 1 AC, dacăţinem seama că vectorulx era arbitrar. Definiţia 1.14 Matricele A şi C 1 AC se numesc matrice asemenea. Observaţia 1.5 Matricele unei transformări liniare relativ la două baze alese sunt matrice asemenea. Definiţia 1.15 Mulţimea ker(f) ={u u V n : f(u) =θ} se numeşte nucleul transformării liniare f. Definiţia 1.16 Mulţimea Im(f) ={w w V n : u V n : f(u) =w} se numeşte imaginea transformării liniare f. Teorema 1.9 Nucleul lui f este un subspaţiu liniar al spaţiului liniar V n. Imaginea lui f este un subspaţiu liniar al spaţiului liniar V n.
25 6 CAPITOLUL 1. NOŢIUNI TEORETICE Demonstraţie. Observăm că ker(f) 6= deoarece θ ker(f). Fie α R şi u, v ker(f) astfelîncât f(u) =θ, f(v) =θ. Atunci f(αu + v) = αf(u)+f(v) =θ şi deci αu + v ker(f). Observăm că Im(f) 6= deoarece θ Im(f). Fie α R şi u, v Im(f). Rezultă căexistă w 1, w V n astfel încât f(u) =w 1,f(v) =w ; αw 1 + w = αf(u)+f(v) =f(αu + v) deunderezultăcă αw 1 + w Im(f). Definiţia 1.17 Dimensiunea spaţiului ker(f) se numeşte defectul lui f şi se notează def(f). Dimensiunea spaţiului Im(f) se numeşte rangul lui f şi se notează rang(f). Teorema 1.10 Transformarea liniară f este injectivă dacă şi numai dacă ker(f) ={θ}. Demonstraţie. Necesitatea. Presupunem că transformarea liniară f este injectivă şi fie u ker(f) deci f(u) =θ. Dar f(θ) =θ şi cum f(u) =f(θ) rezultă că u = θ, adică ker(f) ={θ}. Suficienţa. Presupunem că ker(f) ={θ} şi fie f(u) = f(v). Rezultă f(u v) =θ deci u v ker(f), adică u = v, deci f injectivă. Exerciţiul 1.5 Transformarea liniară f este surjectivă dacăşi numai dacă Im(f) =V n. Teorema 1.11 Fie transformarea liniară f : V n V n.atunci rang(f)+def(f) =n. Demonstraţie. Fie def(f) =r n şi fie v (1), v (),...,v (r)ª obazăîn ker(f). Completăm sistemul de vectori v (1), v (),...,v (r)ª până laobază în spaţiu V n, v (1), v (),...,v (r), v (r+1), v (r+),...,v (n)ª. Vom demonstra că sistemul de vectori f(v (r+1) ),...,f(v (n) ) ª este o bazăîn Im(f). Fie w Im(f). Rezultă căexistă v V n astfel încât f(v) =w. Dar P v = r P α i v (i) + n α i v (i) de unde rezultă că i=1 i=r+1 rx nx w = f(v) = α i f(v (i) )+ α i f(v (i) ), deci w = n P i=r+1 i=1 i=r+1 α i f(v (i) ), deoarece v (i) ker(f),i = 1,r. Rezultă căorice vector din Im(f) se poate scrie ca o combinaţie liniară de vectori din sistemul de vectori f(v (r+1) ),...,f(v (n) ) ª. Arătăm că vectorii sistemului f(v (r+1) ),...,f(v (n) ) ª sunt liniar independenţi în Im(f). np np Fie α i f(v (i) )=θ rezultă că f( α i v (i) )=θ deci i=r+1 i=r+1
26 1.3. TRANSFORMARE LINIARĂ ÎN V N 7 np i=r+1 α i v (i) ker(f) n P i=r+1 P α i v (i) = r β i v (i) i=1 n P i=r+1 P α i v (i) r β i v (i) = θ. Deoarece v (1), v (),...,v (r), v (r+1), v (r+),...,v (n)ª este un sistem de vectori liniar independent, rezultă α r+1 =... = α n = β 1 =... = β r =0, deci vectori f(v (r+1) ),...,f(v (n) ) ª sunt liniar independenţi. Rezultă că vectorii f(v (r+1) ),...,f(v (n) ) ª formează obazăîn Im(f), deci rang(f) =n r rang(f)+def(f) =n. Exerciţiul 1.6 Fie f o transformare liniară şi S = v (1), v (),..., v (p)ª un sistem de vectori din V n,iars 0 = f(v (1) ),f(v () ),..., f(v (p) ) ª.Săsearate că dacă f este injectivă şi S este un sistem de vectori liniar independent în V n,atuncisistemuls 0 este şi el un sistem liniar independent. Rezolvare. Relaţia α 1 f(v (1) )+ + α p f(v (p) ) = θ este echivalentă cu f(α 1 v (1) + + α p v (p) )=θ α 1 v (1) + + α p v (p) ker(f). Deoarece f este injectivă rezultă α 1 v (1) + + α p v (p) = θ şi deoarece S este un sistem liniar independent rezultă α 1 = = α p =0, deci sistemul S 0 este un sistem liniar independent Polinom caracteristic. Vectori proprii şi valori proprii Definiţia 1.1 Un vector v, diferit de vectorul nul, se numeşte vector propriu al transformării liniare f : V n V n,dacă există unscalarλ, astfel încăt f (v) =λv. În acest caz, λ se numeşte valoare proprie sau autovaloare atransformării f. Dacă alegemobazăîn V n şi notăm cu ξ i, i = 1,n coordonatele lui v şi cu A =(a ij ) matricea transformării în această bază, condiţia ca v să fie vector propriu se scrie matriceal în forma a 11 a 1 a 1n a 1 a a n.... a n1 a n a nn sau, în formăechivalentă, λ a 11 a 1 a 1n a 1 λ a a n.... a n1 a n λ a nn ξ 1 ξ. ξ n = λ ξ 1 ξ. ξ n ξ 1 ξ. ξ n i=1 (1.44) 0 = 0.. (1.45) 0
27 8 CAPITOLUL 1. NOŢIUNI TEORETICE Pentru ca sistemul să aibăsoluţii nebanale, se impune ca determinantul coeficienţilor să fie nul, adică det(λi A) = 0. Se calculează întâi autovalorile şi apoi pentru fiecare dintre ele se găsesc vectorii proprii corespunzători. La autovalori reale corespund vectori proprii reali. Dacă A este o matrice reală, s-ar putea să aibăşi autovalori complexe şi atunci problema se complică sau, mai bine zis, poate fi pusă într-un cadru mai general. Putem admite că omatricea de ordinul n este reală saucomplexă. Vom spune că un vector-coloană v, datprinv = T ξ 1 ξ ξ n este un vector propriu al matricei A, dacăestenenulşi dacă existăoconstantă λ, realăsaucomplexă, astfel încât Av = λv. Aflarea autovalorilor se reduce la rezolvarea ecuaţiei algebrice P (λ) =0, unde P (λ) = det(λi A)estepolinomul caracteristic al lui A, variabila λ fiind reală saucomplexă. Vectorii proprii ai matricei A pot şi ei să fie reali sau complecşi. Sevedeuşor că, dacă matriceaa este de ordinul n, atunci P (λ) estedeforma P (λ) =λ n + p 1 λ n p n 1 λ + p n. (1.46) Se poate arăta că p 1 = (a 11 + a + + a nn )= tr A, unde tr este urma matricei A, p n =( 1) n det(a), dar în general, pentru orice k = 1,n p k =( 1) k σ k (1.47) unde σ k este suma minorilor de ordinul k din det(a) (în număr de Cn) k acăror diagonală principalăesteoporţiune din diagonala principală alui det(a). Exerciţiul 1.7 Să se arate că dacă A =(a ij ) este o matrice de ordinul 3, atunci P (λ) =λ 3 (a 11 + a + a 33 ) λ + a + 11 a 1 µ a 1 a + a11 a 13 a 31 a 33 + a a 3 a 3 a 33 λ det(a). Exerciţiul 1.8 Să se arate că două matrice asemenea au acelaşi polinom caracteristic. Rezolvare. Fie A, B două matrice asemenea de ordin n. Atunci există o matrice P de ordin n nesingulară astfelîncât B = P 1 AP. Folosind definiţia polinomului caracteristic obţinem: P B (λ) =det(λi B) =det(λp 1 P P 1 AP) =det(p 1 (λi A)P) = det(p 1 )det(λi A) detp =det(λi A) =P A (λ) deoarece det(p 1 )= 1/ det(p).
28 1.3. TRANSFORMARE LINIARĂ ÎN V N Teorema de reprezentare spectrală Dacănotăm autovalorile matricei A cu λ 1, λ,...,λ n indiferent de faptul că ele sunt reale sau complexe, simple sau multiple, putem scrie P (λ) în forma P (λ) =(λ λ 1 )(λ λ )...(λ λ n ). (1.48) Dacă g (λ) =b 0 λ m +b 1 λ m 1 + +b m 1 λ+b m cu b 0 6= 0 este un polinom cu coeficienţi reali sau complecşi, punem prin definiţie g (A) =b 0 A m + b 1 A m b m 1 A + b m I, (1.49) unde I este matricea unitate de ordinul n. În acest fel, am definit o nouă matrice g (A), ale cărei autovalori vrem să leaflăm. Mai întâi, vom scrie g (λ) =b 0 (λ α 1 )(λ α ) (λ α m ), (1.50) unde α i, i = 1,m sunt rădăcinile lui g (λ). Teorema 1.1 Dacă A este o matrice de ordinul n, cu autovalorile λ i, i = 1,n,iarg (λ) este un polinom oarecare de forma (1.50) atunci det(g (A)) = g (λ 1 ) g (λ ) g(λ n ). (1.51) Demonstraţie. Vom observa că g (A) =b 0 (A α 1 I)(A α I) (A α m I) (1.5) şi că det g (A) =b n 0 det (A α 1 I)det(A α I) det (A α m I). Deoarece putem scrie det (A α i I)=( 1) n det (α i I A) = =( 1) n P (α i ),i= 1,m (1.53) (1.54) det g (A) =( 1) mn b n 0P (α 1 ) P (α ) P (α m ). (1.55) Numerele P (α i )leobţinem din (1.48) Scriem aceste numere unul sub altul, obţinând tabloul cu m linii (α 1 λ 1 )(α 1 λ ) (α 1 λ n ) (α λ 1 )(α λ ) (α λ n ) (1.56)... (α m λ 1 )(α m λ ) (α m λ n )
29 30 CAPITOLUL 1. NOŢIUNI TEORETICE în care apar mn paranteze, pe care ar trebui să le înmulţim între ele. Folosind şi factorul ( 1) mn, putem schimba semnul parantezelor, obţinând acelaşi număr ca mai sus şi tabloul (λ 1 α 1 )(λ α 1 ) (λ n α 1 ) (λ 1 α )(λ α ) (λ n α ). (1.57)... (λ 1 α m )(λ α m ) (λ n α m ) Amairămas factorul b n 0,pecareîl folosim înmuţind produsul numerelor din fiecare coloană cub 0 şi observând că g (λ i )=b 0 (λ i α 1 )(λ i α ) (λ i α m ), i = 1,n. (1.58) De aici, rezultă oconsecinţă importantă şi anume: Teorema 1.13 Dacă A este o matrice de ordinul n, cu autovalorile λ i, i = 1,n,iarg (λ) este un polinom oarecare, autovalorile matricei g (A) sunt numerele g (λ i ), i = 1,n. Demonstraţie. Cu x fixat, considerăm polinomul h (λ) =x g (λ). Conform teoremei precedente, avem det h (A) =h (λ 1 ) h (λ ) h(λ n )= =(x g (λ 1 )) (x g (λ )) (x g (λ n )). Dar h (A) =xi g (A), deci det (xi g (A)) = (x g (λ 1 )) (x g (λ )) (x g (λ n )). (1.59) Înlocuind pe x, care era arbitrar, cu λ variabil, obţinem det (λi g (A)) = (1.60) =(λ g (λ 1 )) (λ g (λ )) (λ g (λ n )) adică polinomul caracteristic al matricei g (A) arerădăcinile g (λ i ), i = 1,n. Dacă facem convenţia că simbolula λ, λ,...,λ n reprezintă faptulcă A are autovalorile λ i, i = 1,n, atunci putem scrie în formăplastică ½ A λ 1,λ,...,λ n (1.61) g (A) g (λ 1 ),g(λ ),...,g(λ n ) oricare ar fi polinomul g (λ), independent de faptul că autovalorilelui A sunt reale sau complexe, simple sau multiple. Teorema precedentă senumeşte uneori teorema de reprezentare spectrală (mulţimea autovalorilor unei matrice formează spectrul matricei). Exemplul 1.5 Matricea A +3I are autovalorile λ i +3 (cazul g (λ) = λ + 3), matricea A are autovalorile λ i (cazul g (λ) =λ ), etc.
30 1.3. TRANSFORMARE LINIARĂ ÎN V N Diagonalizarea unei matrice Definiţia 1.18 Se numeşte matrice diagonală, matriceaj pătratică de forma d d... 0 J = d n Folosim şi scrierea J =diag[d 1,d,..., d n ]. Definiţia 1.19 Se numeşte matrice diagonalizabilă orice matrice asemenea cu o matrice diagonală. Fie A =(a ij ) o matrice de ordinul n, cu elemente reale sau complexe. Vectorii proprii şi autovalorile ei pot, desigur, să fie reale sau complexe. Vom considera spaţiul vectorial C n,careconstă din mulţimea matricelorcoloană de tip n 1, cu operaţiile uzuale de adunare şi înmulţire cu scalari (care acum pot fi şi numere complexe). Fiecărei autovalori îi corespunde câte un vector propriu, determinat până la un factor nenul de proporţionalitate, căci dacă Av = λv (v 6= θ, θ vectorul nul), atunci evident că şi cv cu c 6= 0 satisface condiţia A (cv) =λ (cv), deci este şi el vector propriu, corespunzător aceleeaşi autovalori λ. Teorema 1.14 OmatriceA de ordin n este diagonalizabilă dacăşi numai dacă există obazăîn C n formată din vectorii propri ai matricei A. Demonstraţie. Necesitatea. Deoarece A este o matrice diagonalizabilă, rezultă căexistăomatriceh de ordin n cu proprietatea că det(h)6=0, astfel încât H 1 AH =diag[λ 1,λ,..., λ n ]. Notăm J =diag[λ 1,λ,...,λ n ], adică J este matricea a cărei diagonală principală constă din numerele λ i, i = 1,n şi toate celelalte elemente sunt nule. Se verifică egalitatea AH = HJ. Cum cele două matrice au acelaşi polinom caracteristic, fiind matrice asemenea, rezultă că A are valorile proprii λ 1,λ,..., λ n. Fie H =col[h 1,..., H n ], unde H i C n,i = 1,n, sunt coloanele matricei H. Deoarece H este inversabilă, rezultă cărang(h) = n, vectorii {H 1,...,H n } sunt liniar independenţi şi formează obazăîn C n. Mai mult, AH = H diag[λ 1,..., λ n ] A col [H 1,..., H n ]=col[h 1,..., H n ]diag[λ 1,..., λ n ] AH i = λ i H i,i= 1,n.
31 3 CAPITOLUL 1. NOŢIUNI TEORETICE Deci baza formată din vectorii proprii este {H 1,...,H n }. Suficienţa. Presupunem că v (1), v (),...,v (n)ª sunt vectorii proprii corespunzători valorilor proprii λ 1,λ..., λ n (nu neapărat distincte) şi formează obazăîn C n. Rezultă că matricea H =col v (1), v (),...,v (n) este inversabilă. Deoarece Av (i) = λ i v (i),i= 1,n, rezultă căprimacoloanădinah este vectorul Av (1) = λ 1 v (1),dartotλ 1 v (1) se află şi pe prima coloană dinhj. Adoua coloană dinah este vectorul λ v (),dartotλ v () se află şi pe a doua coloană dinhj, etc. A col v (1), v (),...,v (n) =col v (1), v (),...,v (n) diag[λ 1,...,λ n ] H 1 AH =diag[λ 1,..., λ n ], rezultă că A este diagonalizabilă. Teorema 1.15 Vectorii proprii corespunzători valorilor proprii distincte sunt liniar independenţi. Demonstraţie. Fie matricea A de ordin n cu autovalorile λ i distincte, adică λ i 6= λ j pentru i 6= j. Pentru fiecare λ i,fixăm câte un vector propriu v (i) : Av (i) = λ i v (i), i = 1,n. Vom arăta că sistemul de vectori v (1), v (),...,v (n)ª este liniar independent, deci formează obazăîn spaţiul C n. Mai întâi, arătăm că v (1) şi v () sunt liniar independenţi. În adevăr, fie c 1 v (1) + c v () = θ. Din A c 1 v (1) + c v () = θ c 1 Av (1) +c Av () = c 1 λ 1 v (1) +c λ v () = θ. Dar c 1 v (1) + c v () = θ şi c 1 λ 1 v (1) + c λ v () = θ (1.6) c 1 (λ λ 1 ) v (1) = θ deci c 1 =0şi atunci rezultă şi c = 0. Deci cei doi vectori sunt liniar independenţi. Presupunem acum (ipoteza inductivă) că sistemul de vectori v (1), v (),...,v (k)ª este liniar independent. Va rezulta că dacămai adăugăm şi vectorul v (k+1), cei k + 1 vectori vor fi de asemenea liniar independenţi. În adevăr, fie c 1 v (1) + c v () + + c k v (k) + c k+1 v (k+1) = θ. (1.63) Înmulţind ambii membri ai egalităţii (1.63) cu matricea A, obţinem relaţia c 1 λ 1 v (1) + c λ v () + + c k λ k v (k) + (1.64) +c k+1 λ k+1 v (k+1) = θ.
32 1.3. TRANSFORMARE LINIARĂ ÎN V N 33 Înmulţind (1.63) cu λ k+1 şi apoi scăzând (1.64), obţinem fără dificultate că c 1 (λ k+1 λ 1 ) v (1) + c (λ k+1 λ ) v () + (1.65) + + c k (λ k+1 λ k ) v (k) = θ care, în baza ipotezei inductive, implică toţi coeficienţii din (1.65) nuli, deci c 1 = c = = c k = 0. Dar atunci şi c k+1 =0,adică(1.63)implică toţi coeficienţii c i, i = 1,k+ 1 sunt nuli, deci cei k + 1 vectori sunt liniar independenţi. În concluzie, cei n vectori proprii sunt liniar independenţi, deci matricea H =col v (1), v (),...,v (n),adicămatriceaalecărei coloane sunt cei n vectori proprii ai lui A este nesingulară (deth 6= 0). Observaţia 1.6 În cazul autovalorilor simple, putem spune căîn R n (sau în C n )existăobazăformată din vectori proprii ai matricei A. Au loc egalităţile J = H 1 AH şi A = HJH 1. (1.66) Prima însemnă că am diagonalizat matricea A. Mai interesantă esteînsă cea de a doua, din care deducem A k = HJ k H 1, k =1,, 3,..., (1.67) formulă care,în cazulcă autovalorile lui A sunt distincte, se poate folosi pentru calcularea puterilor A k,observând că J k se obţine foarte uşor, deoarece J k =diag λ k 1,λ k,...,λn k. (1.68) Mai general, dacă g (λ) este un polinom oarecare, dat prin g (λ) =b 0 λ m + b 1 λ m b m 1 λ + b m,iarg (A) estematriceadată prin formula (1.49), din relaţiile (1.67) şi (1.68) deducem că g (A) =H diag [g (λ 1 ),g(λ ),...,g(λ n )] H 1. (1.69) Putem scrie şi relaţia diag [g (λ 1 ),g(λ ),...,g(λ n )] = H 1 g (A) H, (1.70) adică matricea H diagonalizează şi orice matrice g (A), în care g (λ) este un polinom oarecare de variabila λ. Dealtfelg (λ i ), i = 1,nsunt autovalorile lui g (A), cărora le corespund aceeaşi vectori proprii v (i) ai matricei A. Teorema 1.16 (Cayley - Hamilton) Fiecare matrice pătrată A (de ordin n) îşi anulează polinomul caracteristic, adică P (A) =0 (0 matricea nulă).
33 34 CAPITOLUL 1. NOŢIUNI TEORETICE Demonstraţie. Plecăm de la formula (λi A) 1 = 1 B (λ) (1.71) P (λ) adevărată pentru orice λ diferit de autovalori (rădăcinile lui P (λ)). Prin B (λ) am notat matricea transpusă formată cu complemenţii algebrici ai elementelor matricei λi A. Elementele matricei B (λ) sunt polinoame de λ, de grad cel mult egal cu n 1 (cele de pe diagonala principală au efectiv gradul n 1, celelalte au gradul mai mic decât n 1). Deci putem scrie B (λ) =B 0 λ n 1 + B 1 λ n + + B n λ + B n 1 (1.7) în care coeficienţii sunt matrice constante de ordinul n (B (λ), ca şi λi A sunt matrice de ordinul n). Prin înmulţirea relaţiei (1.71) mai întâi cu P (λ) şi apoi cu λi A (la dreapta) obţinem identitatea P (λ) I B (λ)(λi A) (1.73) sau pe larg (λ n + p 1 λ n p n 1 λ + p n ) I (B 0 λ n 1 + +B 1 λ n + + B n λ + B n 1 )(λi A). Din identificarea coeficienţilor matriceali, rezultă I = B 0 A n p 1 I = B 1 B 0 A A n 1 p I = B B 1 A A n p n I = B n B n 3 A A p n 1 I = B n 1 B n A p n I = B n 1 A A I (1.74) (1.75) Prin înmulţire la dreapta a acestor egalităţi cu puterile descrescătoare ale matricei A şi sumarea tuturor egalităţilor obţinute se vede căîn dreapta toţi termenii se reduc, deci se obţine matricea nulă, iar în stânga se obţine tocmai matricea P (A) =A n + p 1 A n p n 1 A + p n I, (1.76) de unde rezultă P (A) =0.
34 1.3. TRANSFORMARE LINIARĂ ÎN V N Algoritmul de diagonalizare a unei matrice Pentru orice valoare proprie λ i cu multiplicitatea m i încercăm să găsim m i vectori proprii liniar independenţi corespunzători acestei valori proprii λ i.dacăacest procedeu reuşeşte pentru toate valorile proprii, atunci se pot obţine n vectori proprii liniar independenţi, deci matricea este diagonalizabilă. Prezentăm un algoritm de diagonalizare a unei matrice de ordin n cu elemente reale. Pasul 1. Determinarea valorilor proprii ale matricei A. Calculăm polinomul caracteristic P (λ) = det(λi A) şi rădăcinile acestuia. Fie P (λ) =(λ λ 1 ) n 1 (λ λ ) n...(λ λ p ) n p. Pasul. Dacă existămăcar o rădăcină a polinomului caracteristic care nu este în R, algoritmul se opreşte. Matricea A nu poate fi adusă laforma diagonală. Dacă toate rădăcinile polinomului caracteristic sunt în R, trecem la Pasul 3. Pasul 3. Determinarea vectorilor proprii ale matricei A. Fieλ 1,λ,..., λ p valorile proprii distincte cu ordinele de multiplicitate algebrică n 1,n,..., pp n p, n i = n. i=1 Pentru fiecare i = 1,p,determinăm vectorii proprii corespunzători valorii proprii λ i. Pentru aceasta rezolvăm p sisteme liniare omogene (A λ i I n )x = θ,i= 1,p. Toate soluţiile liniar independente ale acestor sisteme, în număr de m i, formează vectorii proprii corespunzători autovalorii λ i. Pasul 4. Dacă n i = m i, i = 1,p, matricea poate fi adusă laforma diagonală şi trecem la Pasul 5. În caz contrar algoritmul se opreşte. Pasul 5. Determinarea formei diagonale. Matricea diagonala are forma J =diag[λ 1,..., λ {z } 1,λ,..., λ {z },..., λ p,...,λ {z } p ] n 1 ori n ori n p ori iar vectorii proprii sunt reuniunea vectorilor proprii liniar independenţi determinaţi la Pasul 3. Matricea modală H, careesteşi matricea de asemănare, are coloanele formate din vectorii proprii. Are loc relaţia J = H 1 AH.N Forma canonică Jordan Dificultatea apare atunci când acest procedeu nu este posibil, adică nu se poate săavemm i vectori proprii liniar independenţi coresponzător valorii
35 36 CAPITOLUL 1. NOŢIUNI TEORETICE proprii λ i. În acest caz matricea nu este diagonalizabilă. În acest caz există totdeauna o formă relativsimplă, numită formă Jordan, la care poate fi adusă matricea. Definiţia 1.0 Matricea J p (λ) de ordin p, (p 1,λ R) λ λ J p (λ) = (1.77) λ se numeşte bloc Jordan (celulă Jordan)de ordin p. Definiţia 1.1 OmatriceJ de ordin n de forma J =diag[j n1 (λ 1 ), J n (λ ),...,J nk (λ k )], în carej ni (λ i ), matricedeordinn i,i=1,k, n 1 + n n k = n, este un bloc Jordan corespunzător valorii proprii λ i, se numeşte matrice Jordan de ordin n. Definiţia 1. Fie A o matrice de ordin n. Un sistem de q vectori v (1), v (),..., v (q), q 1, q N, dinr n care satisface condiţiile v (1) 6= θ, Av (1) = λv (1), Av () = λv () + v (1), (1.78)..., Av (q) = λv (q) + v (q 1). se numeşte seriedevectorpropriuşi asociaţi de lungime q corespunzătoare valorii proprii λ amatriceia, în carev (1) este vectorul propriu numit cap de serie, iarceilalţi se numesc vectori asociaţi vectorului propriu. Se poate demonstra că vectorii dintr-o serie de vector propriu şi asociaţi sunt liniar independenţi; de asemenea dacă unei serii de vector propriu şi asociaţi îi adăugăm vectori proprii liniar independenţi sau alte serii de vectori proprii şi asociaţi,sistemul devectoriobţinutesteliniarindependent. De aici rezultă cădacănumărul total de vectori proprii şi asociaţi este egal cu ordinul matricei A, atunciaceştia formează obazăcaresenumeşte bază Jordan corespunzătoare matricei A Algoritmul de aducere la forma Jordan Prezentăm un algoritm de aducere la forma Jordan a unei matrice de ordin n cu elemente reale.
36 1.3. TRANSFORMARE LINIARĂ ÎN V N 37 Pasul 1. Determinarea valorilor proprii ale matricei A. Calculăm polinomul caracteristic P (λ) =det(λi A) =(λ λ 1 ) n 1 (λ λ ) n...(λ λ p ) np, unde λ 1,λ,..., λ p sunt valorile proprii, iar n 1,n,..., n p ordinele de multiplicitate ale rădăcinilor polinomului P (λ). Pasul. Dacă existamăcar un i = 1,p astfel încât λ i / R algoritmul se opreşte. În caz contrar trecem la Pasul 3. Pasul 3. Determinarea numărului seriilor de vectori proprii şi asociaţi. Pentru fiecare valoare proprie în parteλ k, k = 1,p calculăm d k = n k rang(λ k I A) şi obţinem numărul de serii de vectori proprii şi asociaţi corespunzători valorii proprii λ k. Dacă d k =1, avem osingurăseriede lungime n k formată dintr-un vector propriu şi asociaţi şi acestei serii îi corespunde o celulă Jordandeordinn k. Trecem la Pasul 5. Dacă d k = n k, atunci există n k serii de vectori proprii şi asociaţi, corespunzători valorii proprii λ k şi fiecare din aceste serii este formată dintr-un singur vector. Trecem la Pasul 5. Dacă 1<d k <m k, trecem la Pasul 4. Pasul 4. Determinarea lungimii seriilor de vectori proprii şi asociaţi. Sunt d k serii de vectori proprii şi asociaţi de lungimi pe care urmează săle determinăm. Calculăm pentru j 1, ϕ(j, λ k )=rang(λ k I A) j 1 rang(λ k I A) j +rang(λ k I A) j+1. Dacă ϕ(j, λ k ) 6= 0, atunci avem ϕ(j, λ k ) serii de vectori proprii şi asociaţi de lungime j. (Convenimcă puterea zero a oricărei matrice este X matricea unitate a cărei rang este egal cu n). Calculul se opreşte când j ϕ(j, λ k )=n k. j Pasul 5. Determinarea seriilor de vectori proprii şi asociaţi corespunzător valorii proprii λ k. Pornim de la seria de lungime maximă. Fie această lungimes. Dacă v (1) R n este vector propriu pentru matricea A corespunzătoare valorii proprii λ k, cap de serie pentru seria v (1), v (),...,v (s)ª atunci (A λ k I n )v (1) = θ, (A λ k I n )v () = v (1),..., (1.79) (A λ k I n )v (s) = v (s 1).
37 38 CAPITOLUL 1. NOŢIUNI TEORETICE Înlocuind din aproape în aproape obţinem: (A λ k I n )v (s) = v (s 1), (A λ k I n ) v (s) = v (s ),...,(A λ k I n ) s 1 v (s) = v (1), (A λ k I n ) s v (s) = θ. (1.80) Deci ultimul asociat din serie este o solutie nenulă a sistemului liniar omogen (A λi n ) s v (s) = θ. Fie aceasta soluţie v (s). Observăm că (A λi n ) s 1 v (s) = v (1) 6= θ. Alegem vectorul solutie a sistemului (A λi n ) s v (s) = θ acărui imagine prin (A λi n ) s 1 va fi un vector nenul care nu este altul decât vectorul propriu cap de serie, v (1). Ceilalţi vectori din serie se determină utilizând relaţiile (1.79). Trecem la seria următoare în ordinea descrescătoare a lungimilor până se epuizează toate seriile corespunzătoare valorii proprii λ k. Fiecărei serii de vectori proprii şi asociaţi îi corespunde o celulă Jordan egală cu lungimea seriei. Se reia algoritmul de la Pasul 3 pentru următoarea valoare proprie până se epuizează toate valorile proprii. Toate seriile de vectori proprii şi asociaţi formeazăbazajordan. Pasul 6. Determinarea matricei Jordan şi a matricei modale. Matricea Jordan este formată din toate celulele Jordan asociate seriilor de vectori proprii şi asociaţi. Matricea modală H are pe coloane coordonatele vectorilor proprii şi asociaţi, având grijă sălescriemîn ordineaîn careaparîn serieşi în ordinea valorilor proprii.n Autovalorile unor matrice reale simetrice Definiţia 1.3 Matricea reală A =(a ij ) de ordinul n se numeşte simetrică, dacă coincide cu transpusa ei, adică dacă A T = A. Simetria este echivalentă cucondiţia a ij = a ji, i, j = 1,n. Teorema 1.17 Autovalorile unei matrice reale simetrice sunt reale. Demonstraţie. Notăm cu j = 1. Fie α + jβ o autovaloare a matricei A şi u + jv vectorul propriu corespunzător ei. Evident, am presupus că vectorii-coloană u şi v sunt reali. Din A (u + jv) = (α + jβ)(u + jv), rezultă prin separarea părţilor reale şi respectiv imaginare, Au = αu βv, Av = βu + αv. (1.81) Prin înmulţirea primei ecuaţii la stânga cu v T u T,găsim şi a celei de a doua cu
38 1.3. TRANSFORMARE LINIARĂ ÎN V N 39 v T Au = αv T u βv T v, u T Av = βu T u + αu T v. (1.8) Deoarece v T u este un număr,elesteegalcutranspusulsău, astfel încât v T u = v T u T = u T v. (1.83) Analog şi v T Au este un număr şi ţinând seama că matricea A este o matrice simetrică, retultă: v T Au = v T Au T = u T A T v = u T Av (1.84) Scăzând prima ecuaţie(1.8)dinceadeadoua,obţine β u T u + v T v =0. (1.85) Observăm că dacă u = T P α 1... α n atunci u T u = n 0. De αi i=1 aici rezultă că u T u + v T v > 0(vectorulpropriuu + jv este prin definiţie nenul) şi din (1.85) obţinem β = 0, deci orice autovaloare a unei matrice simetrice este reală. Observaţia 1.7 Vectorii proprii sunt de asemenea reali, căci sistemul din care ei se obţin are toţi coeficienţii reali. Se poate arăta că oricare ar fi matricea reală simetrică A,în R n există baze formate din vectori proprii ai lui A. Definiţia 1.4 Matricea reală A =(a ij ) de ordinul n se numeşte antisimetrică, dacă A T = A. Antisimetria este echivalentă cucondiţia a ij = a ji, i, j = 1,n.Seobservă căelementeledepediagonalaprincipalăsuntnuleşi că cele simetrice faţă de această diagonală sunt opuse (au suma zero). Teorema 1.18 Autovalorile unei matrice reale antisimetrice sunt de forma jβ, cuβ număr real. Demonstraţie. Fie α + jβ o autovaloare a matricei A şi u + jv vectorul propriu asociat ei. Din A (u + jv) = (α + jβ)(u + jv), găsim din nou ecuaţiile (1.81). Prin înmulţirea la stânga a primei ecuaţii cu u T şi a celei deadouacuv T,găsim u T Au = αu T u βu T v, v T Av = βv T u + αv T v. (1.86) Folosind antisimetria lui A, vom arăta că pentru orice vector x R n, avem x T Ax =0. x T Ax = x T Ax T = x T A T x = x T Ax, (1.87) deci x T Ax =0, x R n. Adunând cele două ecuaţii (1.86), obţinem α u T u + v T v =0, (1.88) de unde rezultă α = 0. Deci orice autovaloare este de forma jβ.
39 40 CAPITOLUL 1. NOŢIUNI TEORETICE Observaţia 1.8 Cazul β = 0 este posibil. Dacă n =imparşi A este antisimetrică, rezultă det(a) = 0şi p (λ) = det(λi A) are termenul liber nul. Deci λ =0esterădăcină aluip (λ), adică este autovaloare a lui A. Definiţia 1.5 Matricea reală A =(a ij ) de ordinul n se numeşte ortogonală, dacă A T = A 1 (transpusa egală cu inversa). Rezultă că această definiţie este echivalentă cucondiţia AA T = A T A = I, (1.89) unde I este matricea unitate de ordinul n. Oprimă constatare este că det AA T =(det(a)) = 1, deci det (A) =±1. P1. Dacă det(a) =1,rezultăcă fiecare element a ij este egal cu complementul său algebric, folosind relaţia A T = A 1. P. Dacă det(a) = 1, rezultă că a ij = A ij, i, j = 1,n,folosind aceeaşi relaţie. P3. Din AA T = I rezultă căsumapătratelor elementelor de pe fiecare linie este egală cu1,adică nx a ij =1, i = 1,n. (1.90) j=1 P4. Din AA T = I rezultă căprodusuladouă linii distincte este nul, adică nx a ij a kj =0, dacă i 6= k, i, k = 1,n. (1.91) j=1 P5. Din A T A = I rezultă căsumapătratelor elementelor de pe fiecare coloană a matricei A este egală cu1,adică nx a ij =1, j = 1,n. (1.9) i=1 P6. Produsul a două coloane distincte este nul, adică nx a ij a ik =0, dacă j 6= k, j, k = 1,n. (1.93) i=1 P7. Îndeplinirea simultană aproprietăţilor P3 şi P4 atrage că A este ortogonală, deoarece AA T = I, decia T = A 1. P8. Îndeplinirea simultană aproprietăţilor P5 şi P6 atrage că A este ortogonală, deoarece A T A = I, decia T = A 1. Are loc şi echivalenţa P3 şi P4 P5 şi P6. În ce priveşte autovalorile unei matrice ortogonale, putem enunţa următoarea teoremă.
40 1.4. SPAŢIUL VECTORIAL NORMAT 41 Teorema 1.19 Orice autovaloare λ a unei matrice ortogonale satisface condiţia λ =1. Demonstraţie. Fie λ autovaloare a matricei ortogonale A şi fie v un vector propriu: Av = λv. Dacă λ este real, rezultă căşi v este real. Prin transpunere, găsim v T A T = λv T (egalitatea a doi vectori - linie). Prin înmulţirea celor două egalităţi, obţinem v T A T (Av) =λ v T v v T A T A v = λ v T v (1.94), adică v T v = λ v T v. Deoarece v T v 6= 0 (este pozitiv), rezultă λ =1, deci λ = ±1în mod obligatoriu. Dacă λ este complex, vom găsi Av = λv, Av = λv, v T A T = λv T (1.95) folosind conjugarea cantităţilor complexe. Înmulţind prima şi ultima ecuaţie din (1.95), găsim v T A T (Av) =λ λ v T v sau v T v = λ v T v. (1.96) Dacă vectorul v, care are elemente complexe, este considerat de forma v = T ξ 1 ξ ξ n,rezultăcă ξ 1 v T v = ξ ξ 1 ξ ξ n. = (1.97) = ξ 1 + ξ + + ξ n 6=0 şi deci din (1.97), rezultă λ =1,adică λ =1sauλ =cosϕ + j sin ϕ. 1.4 Spaţiul vectorial normat Definiţia 1.6 Vom spune căunspaţiu vectorial real V este normat, dacă fiecărui element x V iseataşează unnumăr real, notat x şi numit norma sa, cu satisfacerea următoarelor axiome: 1 x 0, x V şi x =0 x = θ (elementul nul din V), αx = α x, α R şi x V, 3 x + y x + y, x, y V. Exemplul 1.6 Dacă ne referim la mulţimea numerelor reale R, organizată ca un spaţiu vectorial normat, este evident, că pentru orice x R, valoarea sa absolută x este o normă per. ξ n
41 4 CAPITOLUL 1. NOŢIUNI TEORETICE Exemplul 1.7 Dacă notăm C [a, b] mulţimea funcţiilor reale şi continue x = x (t), definite pe intervalul [a, b], organizată caunspaţiu vectorial faţă de operaţiile obişnuite de adunare a funcţiilor şi înmulţire cu scalari (numere reale), putem defini o normă pe acest spaţiuprinformula x =sup x (t), pentru a t b. (1.98) Observaţia 1.9 Observăm că C [a, b] este un spaţiu infinit dimensional, căci oricare ar fi n natural, se pot găsi n funcţii continue liniar independente. De exemplu: x 1 (t) =1, x (t) =t,..., x n (t) =t n Norme pe R n (n ) Acestea sunt importante, deoarece se folosesc în unele probleme de analiză numerică. Norma este o funcţie: R n R +, care satisface cele trei axiome, din definiţia 1.6. Pentrualedeosebi, atuncicând vorbim despre mai multe norme pe acelaşi spaţiu, putem să le asociem câte un indice, de exemplu 1,,etc. În unele cărţi, funcţia care defineşte o normă este notată cu ajutorul unei litere, de exemplu ρ 1 ( ), ρ ( ), etc. Adoptăm convenţia denotareprinbareverticale. Norma 1 este dată prin x 1 =max x i,undex R n este un vector i oarecare, dat prin x = T x 1 x... x n. Cele trei axiome se verifică imediat şi nu este cazul să insistăm. P Norma este dată prin x = n x i, x R n.săverificăm cele trei i=1 axiome: 1 x 0şi x =0 x =θ, vectorul nul (coloana formată din zerouri) este evidentă. P αx = n P αx i = n P α x i = α n x i = α x pentru α R i=1 i=1 şi x R n. Deci şi axioma a doua este îndeplinită. P 3 x + y = n P x i + y i n P ( x i + y i )= n P x i + n y i = x + i=1 i=1 y, x, y R n aşa cum cere a treia axiomă. i=1 i=1 i=1 Norma euclidiană per n Norma euclidiană per n este definită prinformula q kxk = x 1 + x + + x n, x R n. (1.99)
42 1.4. SPAŢIUL VECTORIAL NORMAT 43 Primele două condiţii (axiome) care definesc o normă suntevidentsa- tisfăcute şi trebuie să overificăm pe cea de a treia. Inegalitatea kx + yk kxk + kyk este echivalentă cu cea obţinută din ea prin ridicarea la pătrat. Aceasta din urmă sescrieîn forma v v nx nx u (x i + y i ) x i +t n X x i ux t n nx yi + yi i=1 i=1 i=1 i=1 i=1 (1.100) care, la rândul ei, este echivalentă cu v v nx ux x i y i t n x i ux t n yi (Cauchy) (1.101) i=1 i=1 adevărată oricarearfix i şi y i, i = 1,n,adică oricare ar fi vectorii x, y R n. Exerciţiul 1.9 Când are loc egalitatea kx + yk = kxk + kyk în R n? Rezolvare. Se ştie că egalitatea à nx! x i y i = i=1 à nx i=1 i=1 x i!ã nx i=1 y i! (1.10) în carex i şi y i, i = 1,n sunt numere reale, are loc dacă şi numai dacă np P α R, astfelîncât y i = αx i, i = 1,n. Dar atunci x i y i = α n şi i=1 x i i=1 deci trebuie ca α>0 pentru ca (1.101) să devină egalitate. În concluzie, trebuie să avemrelaţia x = αy cu α>0între cei doi vectori (ambii au fost presupuşi nenuli). Dacă unul din vectorii x şi y este nul, egalitatea în discuţie devine banală. Exerciţiul 1.10 Orice combinaţie liniară de norme, cu coeficienţi pozitivi, este o normă per n. Rezolvare. Fie ρ 1 (x), ρ (x),..., ρ m (x) norme definite pe R n şi norma P ρ (x) = m c i ρ i (x), unde coeficienţii c i, i = 1,m sunt pozitivi. În mod i=1 evident, avem ρ (x) 0, x R n şi ρ (x) =0 x = θ. Apoi, ρ (αx) = mp P c i ρ i (αx) = α m c i ρ i (x) = α ρ (x), α R şi x R n. În fine, i=1 i=1 P ρ (x + y) = m P c i ρ i (x + y) m c i (ρ i (x)+ρ i (y)) = i=1 i=1 P = m P c i ρ i (x)+ m c i ρ i (y) =ρ (x)+ρ(y), x, y R n. i=1 i=1
43 44 CAPITOLUL 1. NOŢIUNI TEORETICE Exerciţiul 1.11 Dacă este o normă per n şi A =(a ij ) este o matrice reală nesingulară (det(a) 6= 0), atunci ρ (x) = Ax pentru x R n defineşte o nouă normăper n. (Se verifică uşor cele trei axiome). Prin acest procedeu, putem defini o infinitate de norme pe R n,deoarece există o infinitate de matrice nesingulare. De exemplu, dacă luăm norma 1, matricea A = (1.103) şi punem ρ 1 (x)=max{ x 1 + x, x 1 + x 3, x + x 3 }, x R 3 (1.104) avem o nouă normăper 3,dacăţinem seama că Ax = x 1 + x x 1 + x 3, x R 3. (1.105) x + x 3 Dacă luăm norma şi punem ρ (x)= x 1 +x + x 1 +x 3 + x +x 3, x R 3 (1.106) obţinem o nouă normă. Dacă luăm norma euclidiană k k, vomgăsi o altă normă şi anume q ρ 3 (x)= (x 1 +x ) +(x 1 +x 3 ) +(x +x 3 ), x R 3. (1.107) Exerciţiul 1.1 Dacă este o normăper n şi A este o matrice de ordinul n, existăunnumăr M>0astfelîncât Ax M x, x R n. Rezolvare. Mulţimea S = {x; x R n cu x =1}, sfera de rază 1esteo mulţime compactăîn R n (mărginită şi închisă). Orice normă per n este o funcţie continuă decelen variabile independente x i şi deci este mărginită pe S (teorema lui Weierstrass). Deci avem Ax M pentru x S. Dacă x R n este un vector oarecare diferit de vectorul nul, avem A (x/ x ) M şi deci Ax M x. Altfelspus,avem Ax / x M pentru orice x 6= θ din R n.
44 1.4. SPAŢIUL VECTORIAL NORMAT 45 Generarea normelor pentru matricele pătrate Dacă este o normă per n, ea generează oanumitănormăpemulţimea M n (R). Vom nota norma unei matrice A din această mulţime cu simbolul A. Axiomele pe care le satisface o normă pespaţiul M n (R) sunt următoarele: 1 A 0, A M n (R) şi A =0 A = 0 (matricea nulă), αa = α A, α R şi A M n (R), 3 A + B A + B, A, B M n (R), 4 AB A B, A, B M n (R) Ultima axiomă nu are corespondent în cazul normei definite pe R n.dacă plecăm de la o anumită normăper n,notată şi A este o matrice oarecare din M n (R), definim ½ ¾ Ax A =sup x ; x 6= θ, x R n (1.108) unde sup (supremum) este notaţia uzuală pentru marginea superioară a unei mulţimi de numere reale. Definiţia (1.108) este corectă, deoarece acest supremum nu poate fi (conform cu Exerciţiul 1.1). Prima axiomă este evident satisfăcută. Pentru cea de a doua, scriem ½ ¾ (αa) x αa =sup ; x 6= θ = x ½ ¾ α Ax =sup ; x 6= θ = α sup x = α A, α R şi A M n (R). ½ ¾ Ax x ; x 6= θ = (1.109) Pentru a verifica axioma a treia, vom scrie ½ ¾ ½ ¾ (A + B) x Ax + Bx A + B =sup ; x 6= θ =sup ; x 6= θ x x ½ ¾ ½ ¾ Ax + Bx Ax sup ; x 6= θ sup x x ; x 6= θ + ½ ¾ (1.110) Bx +sup x ; x 6= θ = A + B, A, B M n (R). Pentru ultima axiomă, scriem
45 46 CAPITOLUL 1. NOŢIUNI TEORETICE ½ ¾ (AB) x AB =sup ; x 6= θ = x ½ ¾ ½ A (Bx) A Bx =sup ; x 6= θ sup x x = A sup ½ ¾ Bx x ; x 6= θ = A B ¾ ; x 6= θ = (1.111) oricare ar fi A, B M n (R). Am folosit majorarea Ax A x pentru orice vector din R n, care rezultă din definiţia (1.108). În rezumat, formula (1.108) defineşte în adevăr o normă pem n (R), care în acest fel devine un spaţiu vectorial normat real. Teorema 1.0 Dacă notăm ¾ Ax 1 A 1 =sup½ ; x 6= θ (1.11) x 1 pentru orice matrice A =(a ij ) din M n (R), rezultă nx A 1 =max a ij. (1.113) i Demonstraţie. Notăm Ax = y şi avem Ax 1 = y 1 =max y i. Dar i P y i = n np a ij x j şi x j x 1 deci y i x 1 a ij. Pentru moment, notăm j=1 j=1 np M =max a ij şi admitem că acestmaximseatingepentruvaloareak i j=1 a indicelui de linie i. Din y i M x 1, i = 1,n avem Ax 1 M x 1 pentru orice x R n. Toate rapoartele mulţimii din (1.11) sunt mărginite superior de M, careestedeciobarierăsuperioară pentru această mulţime. Dacăgăsim un vector ex 6=θ, pentru care raportul Aex 1 / ex 1 are valoarea M (echivalent Aex 1 = M ex 1 ), rezultă că M este chiar marginea superioară (supremum) a mulţimii de rapoarte. Acest vector este ex, datprinex = (sgn a k1, sgn a k,...,sgn a kn ) T P, are elementul de pe linia k, ex k = n a kj = M şi norma x 1 = 1. Deci el satisface egalitatea Aex 1 = M ex 1 şi atunci formula (1.11) este demonstrată. Norma A 1 se numeşte uneori norma pe linii, deoarece se obţine sumând valorile absolute ale elementelor de pe fiecare linie şi luând apoi cea mai mare sumă găsită. j=1 j=1
46 1.4. SPAŢIUL VECTORIAL NORMAT 47 Teorema 1.1 Dacă notăm A =sup½ Ax x ¾ ; x 6= θ, (1.114) această normăestedatădeformula nx A =max a ij. j i=1 (1.115) Demonstraţie. Notăm Ax = y şi avem Ax = y = P n y i. Din i=1 P y i = n P a ij x j,rezultă y i n a ij x j, i = 1,n şi deci j=1 Ã j=1 nx nx! Ã nx nx! Ax a ij x j = a ij x j. i=1 j=1 j=1 i=1 (1.116) np Dacă notăm pentru moment M =max a ij,putemscrie j i=1 nx Ax M x j = M x, x R n. (1.117) j=1 Ca şi în cazul precedent, dacă găsim un vector ex pentru care Aex = M ex,varezultacă M = A şi deci formula (1.115) este adevărată. Acest np vector x îl găsim astfel: dacă admitemcămax a ij se realizează pentru j i=1 P valoarea k a indicelui de coloană j, adicădacă presupunem că M = n a ik, i=1 considerăm vectorul x ale cărui elemente sunt egale cu zero, în afară de cel de pe linia k, careesteegalcu1. Elareproprietateacă Aex coincide cu coloana k a matricei A, deci Aex = M şi pe de altă parte ex =1. Prin urmare, avem Aex = M ex şi demonstraţia este încheiată. Observaţia 1.10 Nu trebuie săcredemcă toate normele pentru matricele din M n (R) sunt generate de normele pentru vectorii din R n, după cumse va vedea din următorul exemplu. Norma euclidiană pentrumatriceledinm n (R) Pentru A =(a ij ) definim norma sa euclidiană, notată kak, prinformula v u nx nx kak = t a ij. (1.118) i=1 j=1
47 48 CAPITOLUL 1. NOŢIUNI TEORETICE Primele două axiome sunt în mod evident îndeplinite. Cea de a treia este ka + Bk kak + kbk, A, B M n (R). (1.119) Această inegalitate este echivalentă cu cea obţinută prin ridicare la pătrat ka + Bk kak +kak kbk + kbk (1.10) care se scrie pe larg astfel nx (a ij + b ij ) i,j=1 v nx u a ij +t i,j=1 Am folosit pentru suma dublă n P v nx a ij u t i,j=1 np i=1 j=1 nx b ij + i,j=1 notaţia prescurtată nx i,j=1 b ij. np i,j=1 (1.11) evident, din motive de ordin grafic. La rândul său, ultima inegalitate este echivalentă cu v v nx u nx a ij b ij t a ij u nx t (Cauchy). (1.1) i,j=1 i,j=1 i,j=1 Ne putem convinge de aceasta, numerotând elementele a ij,începând cu a 11 şi terminând cu a nn şi scriindu-le în şirul α 1,α,...,α N unde N = n. La fel facem şi cu elementele b ij,pecarelesriemβ 1,β,...,β N. Atunci inegalitatea (1.1) se scrie în forma v v NX ux α i β i t N αi ux t N βi (1.13) i=1 şi este evident adevărată. A mai rămas de verificat ultima axiomă: i=1 b ij kabk kak kbk, A, B M n (R). (1.14) Întâi vom arăta că avemkaxk kak kxk, x R n. În adevăr, dacă Ã! P punem Ax = y, avemy i = n np a ij x j şi deci yi = a ij x j,din j=1 j=1 Ã nx!ã nx! Ã nx yi = a ij!kxk,i=1,n. (1.15) j=1 a ij j=1 x j j=1 i=1
48 1.4. SPAŢIUL VECTORIAL NORMAT 49 şi în continuare à kaxk P = n P yi n np à np = np i=1 a ij i=1 j=1 i=1 a ij j=1! kxk =! kxk = kak kxk (1.16) adică kaxk kak kxk. Dacă v (1), v (),...,v (n) sunt coloanele matricei B, vectorii Av (1), Av (),..., Av (n) i sunt coloanele matricei AB, adică AB =col hav (1), Av (),...,Av (n) şi kabk = Av (1) Av + () + + Av (n) kak ³ v (1) + + v (n) = kak kbk (1.17) deci (1.14) este adevărată. Observaţia 1.11 Matricea unitate I n are norma euclidiană egalăcu n. Dacă arexistaonormă pentru vectori, care săneconducălanormak k pentru matrice, ar trebui să avemki n k =sup I nx =sup x =1, ceea ce x x este evident imposibil. Exerciţiul 1.13 În spaţiul M n (R), punem ρ (A) =max a ij pentru orice i,j matrice A. Să se arate că această funcţie nu defineşte o normă pem n (R). Rezolvare. Fie A = B cu a ij = b ij =1, i, j = 1,n. Matricea AB are toateelementeleegalecun. Deciρ (A) =ρ (B) =1,iarρ (AB) =n şi nu are loc inegalitatea ρ (AB) ρ (A) ρ (B). µ Exerciţiul 1.14 Dacă punem ρ (A) = n spaţiul M n (R). max i,j a ij,avemonormăpe Rezolvare. Primele trei axiome se verifică imediat.pentruaoverificape ultima, luăm două matrice oarecare A =(a ij ), B =(b ij )şi notăm C = AB. P Avem c ij = n a ik b kj,deundegăsim k=1
49 50 CAPITOLUL 1. NOŢIUNI TEORETICE deci µ P n k=1 a ik P c ij n a ik b kj k=1 (max b kj ) (n max a ik )(max b kj ) (1.18) n c ij (n max a ik )(n max b kj ), i, j = 1,n (1.19) ceea ce implică ρ (AB) ρ (A) ρ (B). 1.5 Spaţiul euclidian Un spaţiu euclidian este un spaţiu vectorial real, în care avem o nouă operaţie şi anume produsul scalar a doi vectori. Un astfel de spaţiu poate fi finit dimensional sau cu o infinitate de dimensiuni. Un spaţiu euclidian n-dimensional se notează deobiceicue n. Produsul scalar este o funcţie definită pee E şi cu valori în R şi se notează cusimbolulh, i, adică prin hx, yi înţelegem produsul scalar (număr real) al celor doi vectori x şi y. Uneori, se foloseşte şi notaţia (x, y), dar o preferăm pe prima, deoarece a doua poate să producă confuzie. Axiomele care definesc un produs scalar sunt următoarele: 1 hx, yi 0, x, y E şi hx, xi =0 x = θ, hx, yi = hy, xi, x, y E, 3 hαx, yi = α hx, yi, α R şi x, y E 4 hx + y, zi = hx, zi + hy, zi, x, y, z E O proprietate a produsului scalar (în orice spaţiu euclidian E) este Teorema 1. (Inegalitatea Schwarz - Cauchy-Buniakovski) În o- rice spaţiu euclidian, este adevărată relaţia hx, yi hx, xi hy, yi, x, y E. (1.130) Demonstraţie. Dacă unul din vectori este nul, inegalitatea este adevărată şi se reduce la 0 0. De aceea, putem presupune că ambiivectorisunt nenuli (6=θ ). Avem htx + y,tx + yi = t hx, xi +thx, yi + hy, yi 0, t R (1.131) şi de aici rezultă că discriminantul trinomului este 0, deci (1.130) este adevărată.
50 1.5. SPAŢIUL EUCLIDIAN 51 Inegalitatea poate fi scrisă şi în forma ehivalentă hx, yi p hx, xi phy, yi, x, y E. (1.13) Dacă punem kxk = p hx, xi, definimonormăpee, căci sunt îndeplinite toate condiţiile normei şi anume: 1 kxk 0, x E şi kxk =0 x =θ, kαxk = p hαx,αxi = p α hx, xi = α kxk, α R şi x E, 3 kx + yk kxk + kyk, x, y E. Pentru a demonstra condiţia 3,ţinem seama că esteechivalentăcucea obţinută prin ridicare la pătrat şi anume hx + y, x + yi hx, xi +kxk kyk + hy, yi (1.133) care la rândul său este echivalentă cu (1.13), ce poate fi transcrisăîn forma hx, yi kxk kyk. (1.134) Putem să ne referim la norma k k, spunând că este cea generată de produsul scalar din spaţiul euclidian E. Spaţiul vectorial real R n devine spaţiu euclidian, dacă definim produsul scalar după formula nx hx, yi = y T x = x i y i (1.135) încarex şi y sunt vectori oarecare din R n,daţi prin x = x 1 x... x n T şi respectiv y = T y 1 y... y n. Verificarea celor trei axiome ale produsului scalar este imediată. De observat că normak k generată per n de produsul scalar, este norma euclidiană (introdusă anterior)datădeformula q kxk = x 1 + x + + x n, x R n. (1.136) Definiţia 1.7 Dacă pentru doi vectori x şi y dintr-un spaţiu euclidian E n avem hx, yi =0, se spune că cei doi vectori sunt ortogonali şi se scrie aceasta prin simbolul x y. Dacăunvectorx are norma (uneori se spune lungimea ) egală cu 1, se spune că el este normat şi se numeşte versor. Definiţia 1.8 Spunem că obază v (1), v (),...,v (n)ª din E n este ortonormată, dacă v (i), v (j) =0pentru i 6= j şi v (i), v (i) =1, i = 1,n (echivalent cu ½ v (i), v (j) 0, pentru i 6= j = δ ij unde δ ij =, simbolul lui 1, pentru i = j Kroneker). i=1
51 5 CAPITOLUL 1. NOŢIUNI TEORETICE În legătură cu această definiţie, are loc următoarea teoremă. Teorema 1.3 (Procedeul de ortogonalizare Gram-Schmidt). În o- rice spaţiu euclidian E n există bazeortonormate(prescurtatb.o.n). Demonstraţie. Fie v (1), v (),...,v (n)ª obază oarecare în E n şi să considerăm vectorii u (1) = v (1) u () = v () + α 1 u (1) u (3) = v (3) + α 31 u (1) + α 3 u ()... (1.137) u (n) = v (n) + α n1 u (1) + α n u () + + α n,n 1 u (n 1) cu proprietatea că fiecare dintre ei (în afară de primul) este ortogonal pe toţi cei care îl preced. Astfel, avem u (), u (1) =0 v (), u (1) + α 1 u (1), u (1) =0 v (), u (1) α 1 = hu (1), u (1) i şi am găsit (în modunic)constantaα 1. În continuare, avem u (3), u (1) =0 v (3), u (1) + α 31 u (1), u (1) =0 (1.138) şi încă v (3), u (1) α 31 = hu (1), u (1) i u (3), u () =0 v (3), u () + α 3 u (), u () =0 (1.139) v (3), u () α 3 = hu (), u () i (1.140) şi am găsit (în mod unic) şi vectorul u (3). Presupunând că amdeterminat k 1 vectori cu proprietăţile cerute, arătăm că procedeul poate continua, determinândul şi pe cel de al k-lea, adică pe cel imediat următor. El este de forma u (k) = v (k) + α k1 u (1) + + α k,k 1 u (k 1) (1.141) în care coeficientul α k1, i = 1,k 1seaflă din condiţiile de ortogonalitate pe cei k 1 vectori aflaţi anterior (şi care sunt ortogonali între ei). Astfel, avem
52 1.5. SPAŢIUL EUCLIDIAN 53 u (k), u (1) = v (k), u (1) + α k1 u (1), u (1) v (k), u (1) =0 α k1 = hu (1), u (1) i... u (k), u (k 1) = v (k), u (k 1) + α k,k 1 u (k 1), u (k 1) =0 v (k), u (k 1) (1.14) α k,k 1 = hu (k 1), u (k 1) i şi în concluzie, putem determina toţi cei n vectori din (1.137), care sunt liniar independenţi (de ce?) şi deci nenuli. Ei sunt ortogonali doi câte doi şi dacă îl împărţim pe fiecare la lungimea sa, obţinem o bază ortonormată. Exerciţiul 1.15 Să seafle obază ortonormatăîn R 3, plecând de la baza v (1) =, v () = 3, v (3) = 0. 5 (1.143) Rezolvare. Fie u (1) = v (1) şi u () = v () + α 1 v (1), u (), u (1) =0 α 1 = v (), u (1) / u (1), u (1) = 5/3. Va rezulta că u () este dat prin u () = 8/3 1/3 5/3 T. Apoi, îl căutăm pe u (3) în forma u (3) = v (3) + α 31 u (1) + α 3 u () şi găsim α 31 =0,α 3 =7/5. Va rezulta că u (3) = 4/15 7/15 5/15 T. Înmulţind pe u () cu 3 şi pe u (3) cu 15, am găsit trei vectori ortogonali şi anume 1,, , 4 7 sau 5, (1.144) ultimii trei formând o bază ortonormată. Exerciţiul 1.16 Fie v (1), v (),...,v (n)ª şi u (1), u (),...,u (n)ª douăbaze ortonormate în E n. Să se arate că matriceaschimbării de bază (trecere de la prima la a doua) este ortogonală. P Rezolvare. Dacă notăm u (i) = n a ki v (k), i = 1,n, matricea schimbării de bază estea =(a ij )şi avem k=1
53 54 CAPITOLUL 1. NOŢIUNI TEORETICE Prin urmare, avem u (i), u (j) n À P np = a ki v (k), a mj v (m) = k=1 m=1 P = n np a ki a mj v (k), v (m) P = n a ki a kj. j=1 m=1 P n k=1 a ki a kj k=1 =0pentrui 6= j şi (1.145) np a ki =1pentru i = 1,n,adică A este matrice ortogonală. Exerciţiul 1.17 Fie v (1), v (),...,v (n)ª şi u (1), u (),...,u (n)ª douăbaze în E n. Dacă prima este ortonormată şi matricea schimbării de bază (trecere de la prima la a doua) este ortogonală, rezultă căşiadouabazăeste ortonormată. Rezolvare. Folosind notaţiile din exerciţiul precedent şi relaţia (1.145), rezultă căavem u (i), u (j) = 0 pentru i 6= j şi u (i), u (i) = 1 pentru i = 1,n,adicăşiadouabază este ortonormată. Definiţia 1.9 O transformare liniară f : E n E n se numeşte ortogonală dacă păstrează produsulscalaralvectorilor,adicădacă hf (x),f(y)i = hx, yi, x, y E n. Teorema 1.4 Matricea unei transformări ortogonale în orice bază ortonormată dintr-unspaţiu euclidian E n este o matrice ortogonată. Demonstraţie. Fie v (1), v (),...,v (n)ª obază ortonormată în E n. Din egalitatea f v (i),f v (j) = v (i), v (j) = δ ij, i, j = 1,n rezultă că vectorii f(v (1) ),f(v () ),...,f(v (n) ) ª formeazăşi ei o bază ortonormată. Dacă A =(a ij ) este matricea lui f în baza aleasă, adică f v (i) = i = 1,n rezultă f v (i),f v (j) = n P = n P k=1 m=1 k=1 Prin urmare, avem nx a ki a kj =0dacă i 6= j şi k=1 adică A este o matrice ortogonală. np a ki v (k), np m=1 k=1 a mj v (m) À = n P k=1 a ki v (k), a ki a mj v (k), v (m) P = n a ki a kj. (1.146) k=1 nx a ki =1, i = 1,n, k=1 (1.147) Definiţia 1.30 Transformarea liniară f : E n E n se numeşte autoadjunctă, dacă hf (x), yi = hx,f(y)i, x, y E n.
54 1.5. SPAŢIUL EUCLIDIAN 55 Teorema 1.5 În orice bază ortonormată dine n, matricea unei transformări liniare autoadjuncte este simetrică şi reciproc, dacă există obază ortonormatăîn care matricea unei transformări liniare este simetrică atunci transformarea este autoadjunctă. P Demonstraţie. Necesitatea. Dacă x = n P ξ i v (i) şi y = n η j v (j),putem scrie * nx hf (x), yi = ξ i f v (i), i=1 i=1 + nx η j v (j) = j=1 nx i=1 nx j=1 j=1 ξ i η j f v (i), v (j). (1.148) Dacă A =(a ij ) este matricea lui f în baza aleasă, atunci * nx + f v (i), v (j) nx = a ki v (k), v (j) = a ki v (k), v (j) = a ij, k=1 k=1 (1.149) unde am ţinut seama că vectoriiv (i), i = 1,nformează obază ortonormată. Din ultimele două relaţii, rezultă că nx nx hf (x), yi = a ji ξ i η j, x, y E n. (1.150) i=1 j=1 Schimbând rolul vectorilor x şi y în formula precedentă, vom găsi că nx nx nx nx hx,f(y)i = hf (y), xi = a ji η i ξ j = a ij ξ i η j ; i=1 j=1 i=1 j=1 (1.151) şi deci nx i=1 nx (a ij a ji ) ξ i η j =0. (1.15) j=1 deoarece variabilele ξ i şi η j sunt arbitrare, obţinem a ij = a ji, i, j = 1,n, adică matricea A este simetrică. Suficienţa. Dacă existăîn E n obază ortonormată, în carematriceaunei transformări liniare f este simetrică, rezultă că f este autoadjunctă. În adevăr, din (1.150) şi(1.151)sevedecăîn ipotezaa ij = a ji, i, j = 1,n avem hf (x), yi = hx,f(y)i, x, y E n. Definiţia 1.31 Dacă f : V n V n este o transformare liniară, vom spune că vectorulv 6= θ este un vector propriu pentru f, dacă există unscalar λ, astfel încât f (x) =λx. Numărul λ se numeşte autovaloare (valoare proprie) atransformării f.
55 56 CAPITOLUL 1. NOŢIUNI TEORETICE Dacă f are matricea A =(a ij )în obază e (1), e (),...,e (n)ª din V n, iar vectorul propriu îl căutăm în formav = ξ i e (i),relaţia f (x) =λx i=1 conduce la rezolvarea sistemului (λ α 11 ) ξ 1 α 1 ξ... α 1n ξ n =0 α 1 ξ 1 +(λ α ) ξ α n ξ n =0 (1.153)... α n1 ξ 1 α n ξ +(λ α nn ) ξ n =0 dincaresevedecă autovalorile lui f sunt autovalorile matricei A, iarcoor- donatele ξ i sunt elementele vectorului propriu din R n,aşa cum au fost ele definite anterior. Observaţia 1.1 Autovalorile unei transformări liniare nu depind de baza aleasăîn V n deoarece matricele unei transformări liniare sunt matrice asemenea (observaţia 1.5) iar matricele asemenea au acelaşi polinom caracteristic (exerciţiul 1.8). Autovalorile unei transformări autoadjuncte sunt reale, căci ele apar ca autovalori ale unei matrice reale simetrice. O proprietate importantă a transformărilor liniare autoadjuncte este cea stabilită deurmătoarea teoremă: Teorema 1.6 Fie f : E n E n o transformare liniară autoadjunctă. Atunci, existăîn spaţiul euclidian E n obazăortonormată, formată din vectori proprii ai lui f. Demonstraţie. Ştiind că autovalorile lui f sunt reale, fixăm una dintre ele, pe care o notăm λ 1. Din sistemul (1.153), în carepunemλ = λ 1,putem găsi cel puţinunvectorpropriuîn E n,pecareîl normăm şi îl notăm e (1) astfel încât f e (1) = λ 1 e (1). Considerăm apoi mulţimea E n 1 = x; x E n, x, e (1) =0 ª,careconstă dintoţi vectorii x E n, ortogonali pe vectorul propriu e (1). E n 1 este un subspaţiu vectorial al lui E n,având proprietatea că x E n 1 rezultă că f (x) E n 1. În adevăr, f (x), e (1) = x,f e (1) = λ 1 x, e (1) =0. Putem scrie f : E n 1 E n 1 şi atunci f are măcar un vector propriu (normat) e () E n 1. Acest vector satisface condiţia e (), e (1) =0. Considerăm E n = x; x E n, x, e (1) = x, e () =0 ª mulţimea vectorilor ortogonali pe e (1) şi e (). Aceasta este un subspaţiu vectorial, de dimensiune n, invariant faţă de transformarea f, adică x E n f (x) E n,adică f : E n E n. Rezultăcă f are un vector propriu n P
56 1.5. SPAŢIUL EUCLIDIAN 57 (normat) e (3) E n. Acesta este ortogonal pe precedenţii săi e (1) şi e (). Continuând în acest mod, ajungem să găsim n 1 vectori proprii (normaţi) e (1), e (),...,e (n 1),fiecarefiind ortogonal pe toţi cei care îl preced. Vectorul e (n 1) E = x; x E n, x, e (i) =0,i= 1,n ª, acest subspaţiu de dimensiune doi fiind de asemenea invariant în raport cu transformarea f, adică f (E ) E. În fine, definim un alt subspaţiu invariant faţă def, notate 1 şi dat prin E 1 = x; x E n, x, e (i) =0,i= 1,n 1 ª,încaregăsim un alt vector propriu e (n), ortogonal pe toţi cei care îl preced şi pe care îl putem considera normat (de lungime unu). În concluzie, am găsit n vectori proprii normaţi ai transformării f şi anume e (1), e (),..., e (n), ortogonali doi câte doi şi versori: e (i), e (j) =0 pentru i 6= j şi e (i), e (i) = 1 pentru i = 1,n. Aceşti vectori sunt liniar independenţi. În adevăr din c 1e (1) + c e () + + c n e (n) = θ, rezultă prin înmulţirea scalară cue (i) că c i e (i), e (i) = c i =0, i = 1,n. Deci ei formează baza ortonormată căutatăîn E n. Observaţia 1.13 Au loc incluziunile E n E n 1 E k E E 1, fiecare E k fiind un subspaţiu de dimensiune k, k = 1,n. Aplicaţie în cazul spaţiului R n. Baza standard în R n este formată din vectorii u (1) = 0., u () = 1.,...,u (n) = (1.154) şi este ortonormată. Coordonatele unui vector oarecare x, exprimat prin x = T x 1 x... x n sunt chiar numerele xi, i = 1,n deoarece este P evident că avemx = n x i e (i). i=1 Fie A = (a ij ) o matrice de ordinul n, matricea în baza standard a transformării liniare f : R n R n, definită prin condiţiile Avem f u (i) = nx a ji u (j),i= 1,n. j=1
57 58 CAPITOLUL 1. NOŢIUNI TEORETICE f u (1) = a 11 a 1. a n1,...,f u (i) =...,f u (n) = a 1n a n a 1i a i. a ni,. a nn adică aceşti vectori sunt coloanele matricei A. Scriind x = P n (1.155) x i u (i) şi i=1 P f (x) = n x i f u (i) se vede că putem exprima această transformare şi prin i=1 egalitatea matriceală f (x) =Ax (produs de matrice), x R n. Dacă în plus matricea reală A este şi simetrică, conform celor spuse, transformarea liniară f careoadmitecamatriceasaîn baza standard, adică transformarea definită prinf u (i) P = n a ji u (j), i = 1,neste autoadjunctă, j=1 adică avemhf (x), yi = hx,f(y)i, x, y R n. Observaţia 1.14 Deoarece atât autovalorile, cât şivectoriipropriiaima- tricei simetrice A coincid cu autovalorile şi vectorii proprii ai transformării autoadjuncte (sistemul (1.153)), rezultă că pentru A există în R n obază ortonormată din vectori proprii ai săi şi că deci orice matrice simetricăpoate fi diagonalizată cu ajutorul unei matrice ortogonale! Observaţia 1.15 Dacă A (simetrică) are autovalorile λ i, i = 1,ndistincte, găsim pentru fiecare λ i câte un vector propriu (normat), ansamblul lor formând baza ortonormată căutată. Dacă o autovaloare are multiplicitatea p ( p n), ei îi corespund p vectori proprii independenţi. Dacăeinusunt ortogonali doi câte doi, folosim procedeul de ortogonalizare Gram-Schimdt, obţinând pentru autovaloarea respectivă unnumăr de vectori proprii ortogonali între ei egal cu multiplicitatea sa (adică p). Trebuie să ţinem seama de faptul că orice combinaţie liniară nenulă de vectori proprii corespunzători aceleeaşi autovalori λ, estedeasemeneavector propriu corespunzător cu λ. În adevăr, dacă avemav (i) = λv (i), i = 1,p atunci px px px v= c i v (i) Av = c i Av (i) =λ c i v (i) =λv. i=1 i=1 i=1 (1.156) Vom ilustra cele expuse prin următorul exerciţiu.
58 1.5. SPAŢIUL EUCLIDIAN 59 Exerciţiul 1.18 Se considerămatricea A = (a) Săsearatecăîn R 3 există obazăformată din vectori proprii ai lui A. (b) Săseafle obază ortonormată formată din vectori proprii ai matricei A. Rezolvare. (a) Aflăm polinomul caracteristic P (λ) = det(λi A) = (λ +3) (λ 6). Avem autovalorile λ 1 = λ = 3, λ 3 = 6. Pentru aflarea vectorilor proprii folosim sistemul (1.153), în cazuln = 3. Pentru λ = 3, vom găsi doi vectori proprii liniar independenţi (sistemul se reduce la o singură ecuaţie) şi anume v (1) şi v (),daţi prin v (1) = T şi v () = T 1 0. Pentru λ =6. găsim un singur vector propriu şi anume v (3),datprinv (3) = 1 T,făcând evident abstracţie de factorii de proporţionalitate. Aceşti trei vectori sunt liniar independenţi şi după cuma fost stabilit mai demult, în cazul general, matricea H =col v (1), v (), v (3) H = satisface condiţia AH = HJ sau J = H 1 AH, undej =diag[ 3, 3, 6]. (b) Pentru a afla baza ortonormată căutată, aplicăm procedeul de ortogonalizare vectorilor v (1) şi v (), punând e (1) = v (1), e () = v () + αv (1) şi găsind, din ecuaţia v () + αe (1), e (1) =0că α = 1/, de unde avem e () = = 1 1 Acum avem o bază în R 3,formată din trei vectori ortogonali doi câte doi 1 1 0,, 1, 1 1 iar dacă îl normăm pe fiecare, găsim baza ortonormată căutată 1 0 1, ,
59 60 CAPITOLUL 1. NOŢIUNI TEORETICE Schimbând notaţiile şi numindu-i pe aceşti vectori e (1), e (), e (3) avem o altă matrice H =col e (1), e (), e (3),caresatisfaceşi ea condiţia A H = HJ, unde J a fost definită anterior(notaţia J provinedelanumelematematicianului Jordan). Evident că avemdinnouj = H 1 A H, daracum H fiind o matrice ortogonală, rezultă H 1 = H T şi deci putem scrie J = H T A H. Ordinea în caresenumerotează autovalorile este arbitrară, de exemplu am fi putut pune λ 1 =6,λ = 3, λ 3 = 3 şi atunci se modifică şi matricea H (se schimbă coloanele între ele). Observaţia 1.16 Chiar dacă fixăm ordinea autovalorilor (deci şi a vectorilor proprii), matricea H (deci şi H) nuesteunicdeterminată. În exemplul precedent, puteam să fi schimbat primele două coloane între ele (ambii vectori v (1) şi v () corespund aceleeaşi autovalori λ = 3). O consecinţă importantă a teoremei care spune că orice matrice reală simetrică deordinuln are n vectori proprii liniar independenţi este o metodă de aducere a unei forme pătratice la forma canonică (sumădepătrate). Să considerăm un polinom omogen de gradul doi în variabilele x 1, x,..., x n, notat prescurtat prin f (x)în locdef (x 1,x,...,x n ). Acesta are forma nx f (x) = a ii x i + X b ij x i x j. (1.157) i=1 i<j Dacă notăm b ij =a ij şi punem a ji = a ij, i, j = 1,n, definim o matrice reală simetrică A =(a ij )deordinuln şi este evident că putemscrie à nx nx nx nx! f (x) = a ij x i x j = x i a ij x j = x T Ax i=1 j=1 i=1 j=1 (1.158) unde x este vectorul din R n,definit prin x = x 1 x... x n T. Dacă ne gândim la cei n vectori proprii liniar independenţi ai lui A, notaţi v (1), v (),..., v (n) care formează obază ortonormată în R n şi punem H = col v (1), v (),...,v (n),ştim că avemh T AH = J, unde J =diag[λ 1,λ,...,λ n ], λ i cu i = 1,n fiind autovalorile matricei H. Trecerea de la baza standard din R n la baza ortonormată formată din vectorii proprii v (i), i = 1,nse face cu ajutorul matricei H. Dacănotăm ξ 1, ξ,..., ξ n coordonatele vectorului x în noua bază, această trecere o putem reda prescurtat (matriceal), scriind x = Hξ, unde ξ este vectorul-coloană având elementele ξ i, i = 1,n.Atunci, vom putea scrie
60 1.5. SPAŢIUL EUCLIDIAN 61 f (x) =x T Ax =(Hξ) T A (Hξ) = = ξ T H T AH ξ = ξ T P Jξ = n λ i ξi, i=1 (1.159) şi vom spune că amgăsit o formă canonică pentru f (sumă depătrate ale variabilelor ξ i ). Putem exemplifica cele spuse aici, folosind matricea A din exerciţiul precedent. Exerciţiul 1.19 Să se aducă la forma canonică, forma pătratică f (x) =x 1 x + x 3 +4x 1 x 8x 1 x 3 4x x 3. Rezolvare. Avem a 11 =1,a =, a 33 =1,a 1 =,a 13 = 4, a 3 = deci matricea formei pătratice f este 1 4 A =. 4 1 Matricea ortogonală care diagonalizează pea este H = , iar autovalorile lui A sunt λ 1 = 3, λ = 3, λ 3 =6. Făcând substituţia x 1 = 1 ξ ξ + 3 ξ 3 x = Hξ x = 4 3 ξ ξ 3 x 3 = 1 ξ ξ 3 ξ 3 obţinem f(x) = 3ξ1 3ξ +6ξ3. Metoda descrisă senumeşte aducerea unei forme pătratice la forma canonică, printr-o transformare ortogonală de coordonate. Succesul acestei metode este condiţionat de aflarea autovalorilor matricei A, care presupune rezolvarea unei ecuaţii algebrice de gradul n (în cazul general). Vom vedea că existăaltemetodedeaducerelaformacanonică, care nu presupun aflarea autovalorilor. Pânăatunciînsă, săreţinemcăîn R n există obază canonică ortonormată, în careformapătratică f(x) =x T Ax P să fiescrisă f(x) = n λ i ξi,în careλ i, i = 1,n sunt autovalorile lui A i=1 (simple sau multiple), iar ξ i, i = 1,nsunt coordonatele vectorului x în baza canonică.
61 6 CAPITOLUL 1. NOŢIUNI TEORETICE 1.6 Forme liniare, biliniare şi pătratice Definiţia 1.3 O aplicaţie (funcţie) f : V R se numeşte formăliniară, dacă satisface condiţiile f (x + y) =f (x)+f (y), x, y V f (αx) =αf (x), α R şi x V, unde V spaţiu vectorial real. Spaţiul V poate să fieşi infinit dimensional. De exemplu, dacă notăm cu V = C [a, b], mulţimea funcţiilor reale continue pe [a, b], atunci aplicaţia f, definită prin Z b f (x) = x (t) dt, x C [a, b] (1.160) a este o formă liniară pec [a, b]. Algebra liniară studiazăînsă cazul spaţiilor liniare finit dimensionale V n.dacă v (1), v (),...,v (n)ª este o bazăîn V n şi f : V n R este o formă liniară, notăm f v (1) = a 1, f v () = a,..., f v (n) = a n,pentru P x = n ξ i v (i),vomgăsi i=1 Ã nx! nx f (x) =f ξ i v (i) = ξ i f v (i) nx = a i ξ i, x V n. i=1 i=1 i=1 (1.161) Dacă în V n luăm o altă bază e (1), e (),...,e (n)ª cu e (i) = c ji v (j), j=1 P i = 1,n şi notăm x = n η i e (i),găsim i=1 µ n P P f (x) =f η i e (i) = n η i f e (i) = Ã i=1! Ãi=1! P = n np P η i f c ji v (j) = n np P η i c ji a j = n b i η i (1.16) i=1 j=1 i=1 P unde am folosit notaţia b i = n c ji a j, i = 1,n. Spunem că a i sunt coeficienţii j=1 formei liniare f în primabază, iar η i sunt coeficienţii săi în bazaadoua. Exerciţiul 1.0 Dacăîn R n folosim baza standard şi notăm u (i), i = 1,n vectorii acestei baze, punând f u (i) = a i, i = 1,n şi considerând vectorul j=1 i=1 n P
62 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 63 a R n ale cărui elemente sunt a i (adică a = T a 1 a... a n ), din P (1.161) rezultă f (x) = n a i ξ i = ha, xi, x R n,undeh, i reprezintă i=1 produsul scalar în R n. De fapt, de aici rezultă că orice formă liniarăper n (mai general, în oricespaţiu euclidian E n ) poate fi scrisăîn formaf (x) = ha, xi, undea este un vector fixat şi x este vectorul curent din R n. Din punct de vedere al consecinţelor, cazul formelor biliniare pe V n este mult mai important. Definiţia 1.33 O formă biliniară reală esteoaplicaţie f : V n V n R, liniară în raport cu fiecare dintre cele două variabile ale sale. Aceasta înseamnă ½ căsuntîndeplinite condiţiile f (x + y, z) =f (x, z)+f (y, z), ½ f (αx, y) =αf (x, y) (1.163) f (x, y + z) =f (x, y)+f (x, z) f (x,αy) =αf (x, y) oricare ar fi x, y, z V n şi oricare ar fi α R. Dacă fixăm o bază v (1), v (),...,v (n)ª în V n şi notăm f v (i), v (j) = a ij, i, j = 1,n avem Ã! np np f (x, y) =f ξ i v (i), η j v (j) = i=1 j=1 P = n np ξ i η j f (1.164) v (i), v (j) P = n np a ij ξ i η j i=1 j=1 i=1 j=1 pentru valoarea (numărul) f (x, y), în funcţie decoordonatelecelordoivec- tori x şi y în baza aleasă. Dacă notăm A =(a ij )şi numim aceasta matricea formei biliniare f în bazadată, putem scrie matriceal formula (1.164) astfel η 1 f (x, y) = η ξ 1 ξ ξ n A.. (1.165) η n Observaţia 1.17 În R n,dacăfixăm baza standard u (i),i= 1,n ª şi notăm f u (i), u (j) = a ij,putemscrie y 1 f (x, y) = y x 1 x x n A. = xt Ay, (1.166) y n oricare ar fi vectorii-coloană x şi y.
63 64 CAPITOLUL 1. NOŢIUNI TEORETICE Definiţia 1.34 Oformă biliniară f : V n V n R se numeşte simetrică, dacă f (x, y) =f (y, x), x, y V n. Dacă f este simetrică, matricea ei A =(a ij )estesimetricăîn oricebază din V n,căci din f v (i), v (j) = f v (j), v (i) rezultă a ij = a ji, i, j = 1,n. Reciproc, dacă matricea unei forme biliniare f este simetrică într-o bază dată v (1), v (),...,v (n)ª din V n,adicădacăavema ij = a ji, i, j = 1,n, rezultă că f este simetrică. În adevăr, dacă x şi y sunt doi vectori oarecare din V n,avem nx nx nx nx f(x, y)= a ij ξ i η j = a ji η j ξ i =f(y,x). (1.167) i=1 j=1 j=1 i=1 Cu alte cuvinte, este suficient ca să avemf v (i), v (j) = f v (j), v (i) pentru toţi vectorii unei baze în V n,pentrucasăavemf (x, y) =f (y, x) pentru orice pereche de vectori şi deci f să fie simetrică. Schimbarea matricei unei forme biliniare la schimbarea bazei Teorema 1.7 Fie f oformă biliniară pev n, având matricele A =(a ij ) în primabazăşi B =(b ij ) în ceadeadouabază. Dacă notăm C =(c ij ) matricea schimbării de bază, atunci B = C T AC. (1.168) Demonstraţie. Notând e (1), e (),...,e (n)ª şi respectiv v (1),...,v (n)ª cele două baze, au loc relaţiile nx v (i) = c ji e (j),a ij = f e (i), e (j),b ij = f v (i), v (j) j=1 (1.169) şi putem scrie = n P µ P n b ij = f c ki e (k), k=1 p=1 k=1 np c pj e (p) = p=1 np c ki c pj f e (k), e (p) P = n pentru i, j = 1,n. Săobservăm că suma k=1 p=1 P n p=1 (1.170) np c ki a kp c pj a kp c pj este egală cuprodusul liniei k din matricea A, cucoloanaj din matricea B. Dacă pentru moment np notăm AC = M = (m ij ), putem scrie prescurtat a kp c pj = m ij. În p=1
64 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 65 fine, dacă notăm c ki = c 0 ik şi observăm că matricea c 0 ij = C T,dinrelaţia b ij = n P k=1 c 0 ik m kj, b ij este egal cu produsul liniei i din C T,cucoloanaj din M care are loc pentru orice i, j = 1,n.Rezultăcă B = C T M = C T (AC) =C T AC. (1.171) În legătură cu cele prezentate aici, se pune problema găsirii unei baze vectoriale, în care o anumită formă biliniară dată să aibă matricea cea mai simplă, adică să fie o matrice diagonală. Teorema 1.8 Fie f oformă biliniară simetrică, cu matricea A =(a ij ) în obază dată dinv n. Dacă toţi minorii principali i,i= 1,n sunt nenuli, există obază v (1), v (),...,v (n)ª în V n,în caref are forma canonică f (x, y) = 0 ξ 1 η ξ η + + n 1 ξ n η n, 1 n (1.17) unde am notat 0 =1 Demonstraţie. Presupunem că forma biliniară f : V n V n R este simetrică şi că matriceaeia =(a ij )într-o bază dată e (1), e (),...,e (n)ª are toţi minoriiprincipalinenuli. Minorii principali sunt a 11 a 1 a 1p 1 = a 11, = a11 a 1 a 1 a,..., p = a 1 a a p, a p1 a p a pp..., n = a 11 a 1 a 1n a 1 a a n a n1 a n a nn. (1.173) Vom căuta o bază v (1), v (),...,v (n)ª cu proprietatea că f v (i), v (j) = 0 pentru i 6= j, ceea ce va însemna că matricea B =(b ij )aformeif în noua bază are elementele b ij = 0 pentri i 6= j, adicăesteomatricediagonală. Vom căuta vectorii v (i) înforma v (1) = α 11 e (1) v () = α 1 e (1) + α e ()... v (p) = α p1 e (1) + α p e () + + α pp e (p). (1.174)... v (n) = α n1 e (1) + α n e () + + α nn e (n)
65 66 CAPITOLUL 1. NOŢIUNI TEORETICE Primul vector îl aflăm din condiţia f v (1), e (1) =1,adică α 11 a 11 =1, de unde găsim α 11 =1/a 11. Deoarece 0 =1,putemscriecă α 11 = 0 / 1. Vectorul v () îlaflăm din condiţiile f v (), e (1) =0şi f v (), e () =1, care conduce la sistemul ½ α1 a 11 + α a 1 =0 α 1 a 1 + α a =1, cu = a11 a 1 a 1 a 6= 0 (1.175) care are soluţie unică (α 1 şi α ), în careα = 1 /.Pev (3) = α 31 e (1) + α 3 e () + α 33 e (3) îlaflăm din condiţiile f v (3), e (1) = f v (3), e () =0şi f v (3), e (3) = 1, care conduce la sistemul α 31 a 11 + α 3 a 1 + α 33 a 13 =0 α 31 a 1 + α 3 a + α 33 a 3 =0 α 31 a 31 + α 3 a 3 + α 33 a 33 =1, cu 3 = a 11 a 1 a 13 a 1 a a 3 a 31 a 3 a 33 6= 0. (1.176) Sistemul are soluţia unică (α 31, α 3 şi α 33 ), în care α 33 = / 3. Este clar că procedeul poate fi continuat, ultimul vector v (n) fiind supus la condiţiile f v (n), e (1) = f v (n), e () = = f v (n), e (n 1) =0,f v (n), e (n) =1. În plus, vom găsi că α nn = n 1 / n. Din condiţia făcută, se vede că orice vector v (p) ( p n) satisface condiţia f v (p), e (k) =0pentru p>k,adicăb pk = 0 pentru p>k. Ţinând seama că f este simetrică, rezultă b pk =0şi pentru p<k,adicămatricea B este de tip diagonal. Elementele ei de pe diagonala principală sunt b ii = f v (i), e (i) = f v (i),α ii e (i) = = α ii f v (i), e (i) = α ii = (1.177) i 1 i oricare ar fi i = 1,n. Toate aceste elemente sunt diferite de 0. Arătăm că v (1), v (),...,v (n)ª formează onouăbază, adică sunt liniar independenţi. În adevăr, avem np c i v (i) = θ i=1 µ n P f c i v (i), v (k) = c k f v (k), v (k) = θ i=1 c k =0 (1.178)
66 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 67 P oricare ar fi k = 1,n. Prin urmare, dacă notăm x = n P ξ i v (i), y = n η j v (j) şi ţinem seama de (1.176), putem scrie i=1 f (x, y) = 0 1 ξ 1 η ξ η + + n 1 n ξ n η n. j=1 Exerciţiul 1.1 Se dă forma biliniară simetrică f (x, y) =x 1 y 1 +x y +5x 3 y 3 +4(x 1 y + x y 1 ) (x 1 y 3 + x 3 y 1 ) în care variabilele reale x i, y i sunt coordonatele vectorilor x şi y, în baza standard din R 3. Să seafle obază canonică şi să se scrie expresia lui f în această bază. Rezolvare. Baza iniţială esteformată din vectorii e (i), i = 1, 3daţi prin e (1) = T, e () = T, e (3) = T. Vectorii x şi y sunt daţi prin x = T T x 1 x x 3, respectiv y = y1 y y 3.Vom găsi f e (1), e (1) =1,f e (), e () =,f e (3), e (3) =5, f e (1), e () =4,f e (1), e (3) =, f e (), e (3) =0 deci matricea lui f în bazainiţială este A = Rezultă 1 =1, = 14, 3 = 78. Pentru v (1) = α 11 e (1) avem α 11 =1;pentruv () = α 1 e (1) + α e () avem α 1 =/7 şi α = 1/14; pentru v (3) = α 31 e (1) + α 3 e () + α 33 e (3) avem α 31 = /39, α 3 =4/39, α 33 =7/39. Deci baza canonică este 1 7 v (1) = 0, v () = 1 14, v (3) =. 0 0 P Dacă notăm x = 3 P ξ i v (i), y = 3 η i v (i) vom găsi i=1 legătura între variabile fiind i=1 f (x, y) =ξ 1 η ξ η ξ 3η 3,
67 68 CAPITOLUL 1. NOŢIUNI TEORETICE x 1 = ξ ξ 39 ξ 3 y 1 = η 1 + x = 1 14 ξ η 39 η 3 39 ξ 3, y = 1 14 η η 3. 7 x 3 = 39 ξ 3 7 y 3 = 39 η 3 Cazul formelor pătratice este mai important, din punct de vedere al aplicaţiilor în rezolvarea unor probleme, decât cel al formelor biliniare, deşi este în strânsă legătură cu acesta. Definiţia 1.35 Dacă f : V n V n R esteoformă biliniară simetrică, funcţia g : V n R dată pring (x) =f (x, x), x V n se numeşte formă pătratică reală. Dacă e (1), e (),...,e (n)ª P este o bază devectoriîn V n, x = n ξ i e (i) este un vector oarecare şi A =(a ij )estematricealuif în această bază, putem scrie à nx! nx nx nx g (x) =f (x, x) =f ξ i e (i), ξ j e (j) = a ij ξ i ξ j, i=1 j=1 i=1 j=1 (1.179) cu observaţia că a ij = a ji, i, j = 1,n, deoarece matricea A este simetrică. Are loc următoarea teoremă, care decurge din teorema corespunzătoare despre găsirea unei baze canonice pentru formele biliniare simetrice. Teorema 1.9 (Teorema lui Jacobi) Fie f o formă biliniară simetrică şi fie A =(a ij ) matricea formei biliniare într-o bază datădinv n. Dacă toţi minorii săi principali i,i = 1,n sunt nenuli, există obază canonică v (1), v (),...,v (n)ª în V n,în careformapătratică g (x) =f (x, x) se scrie i=1 g (x) = 0 1 ξ ξ + + n 1 n ξ n (1.180) ξ i, i = 1,n fiind coordonatele vectorului x în baza canonică. Exerciţiul 1. Să se aducă la forma canonică forma pătratică g (x) =x 1 x 1 x 4x 1 x 3 +4x + x 3 în carex i, i = 1,n sunt coordonatele vectorului x R 3, în baza standard.
68 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 69 Rezolvare. Matricea formei pătratice g (şi a formei biliniare f din care provine) este 1 1 A = 1 4 0, 0 1 cu 1 =1, =3, 3 = 13. Dacă notăm e (1), e (), e (3) vectorii bazei standard din R 3,avema ij = f e (i), e (j), i, j = 1, 3. Primul vector v (1) al bazei canonice se cautăînformav (1) = α 11 e (1),cuf v (1), e (1) =1şi rezultă α 11 = 1. Deci v (1) = e (1). Al doilea vector v () = α 1 e (1) + α e () satisface condiţiile f v (), e (1) =0,f v (), e () =1,careconduclasistemul ( α1 α =0 α 1 +4α =1 α 1 = 1 3,α = 1 3 v() = Ultimul vector îl căutăm în formav (3) = α 31 e (1) + α 3 e () + α 33 e (3) şi îi impunemcondiţiile f v (3), e (1) =0,f v (3), e () =0,f v (3), e (3) =1, care conduc la sistemul α 31 α 3 α 33 =0 α 31 +4α 3 =0 α 31 + α 33 =1 α 31 = 8 13 α 3 = 13 α 33 = 3 13 v (3) = Dacă notăm ξ 1, ξ, ξ 3 coordonatele vectorului x în baza v (1), v (), v (3)ª, găsim g (x) =ξ ξ 3 13 ξ 3, iar matricea schimbării de bază este C = x 1 = ξ ξ 8 13 ξ 3 x = 1 3 ξ 13 ξ 3 x 3 = 3 13 ξ 3. O altă metodă de găsire a unei baze canonice pentru o formă pătratică reală se bazează pe folosirea transformării liniare autoadjuncte ataşate ei. Dacă f = f (x, y) esteoformă biliniară simetricăîn E n, care are matricea
69 70 CAPITOLUL 1. NOŢIUNI TEORETICE A =(a ij )în baza ortonormată e (1), e (),...,e (n)ª,considerăm şi transformarea liniară autoadjunctă ϕ : E n E n,careareaceeaşi matrice A în baza aleasă e (1), e (),...,e (n)ª.vremsădemonstrăm că are loc egalitatea f (x, y) =hϕ (x), yi, x, y E n, (1.181) unde h, i reprezintă produsulscalarîn E n.observând că şi hϕ (x), yi este oformă biliniară în E n, va fi suficient să arătăm că matricele celor două forme biliniare din (1.181) în baza e (1), e (),...,e (n)ª coincid, de unde va rezulta că celedouă forme biliniare sunt identice. În adevăr, dacă B este matricea formei hϕ (x), yi, avem b ij = ϕ e (i), e (j) = n À P = a ki e (k), e (j) (1.18) = a ji = a ij, i, j = 1,n. k=1 Acum, ştim că pentru orice transformare liniară autoadjunctă (ceea ce înseamnă că matricea ei este simetrică în oricebază) există obazăformată din vectori proprii ai săi, ortogonali doi câte doi. Uneori, găsirea acestei baze presupune aplicarea procedeului de ortogonalizare Gram-Schmidt. Fie v (1), v (),...,v (n)ª această bază, pentru care avem ϕ v (i) = λ i v (i), i = 1,n şi ³ bij v (i), v (j) = 0 pentru i 6= j. Dacăalegemaceastăbazăşi notăm B = matricea (comună) a celor două transformări, avem bij = ϕ v (i), v (j) = λ i v (i), v (j) = 0 pentru i 6= j şi bii = λ i v (i), v (i), i = 1,n. (1.183) P Folosind notaţia x = n ξ i v (i) pentru vectorul curent din E n şi g (x) = i=1 f (x, x) pentruformapătratică obţinută din forma biliniară f (x, y), avem g (x) =α 1 ξ1 + α ξ + + α n ξn, cu α i = λ i v (i), v (i) = λ i v (i) (1.184), i = 1,n. Exerciţiul 1.3 Să seaducă la forma canonică g (x) =x 1 +x +3x 3 4x 1 x 4x x 3 în care variabilele x i, i = 1, 3 sunt numere reale. Rezolvare. x este vectorul curent din R 3,alecărui coordonate în baza standard sunt x 1, x, x 3. Matricea acestei forme pătratice pătratice (şi a formei biliniare din care provine) este
70 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 71 A = În acelaşi timp, A este şi matricea transformării liniare ϕ, care satisface g (x) = hϕ (x), xi. Căutăm valorile proprii şi vectorii proprii pentru ϕ: λ 1 0 P (λ) = λ 0 λ 3 = λ3 6λ +3λ +10=0 cu rădăcinile λ 1 =5,λ =,λ 3 = 1şi vectorii proprii v (1) = 1 T, v () = 1 T, v (3) = 1 T, care sunt ortogonali doi câte doi. Mai avem v (1), v (1) =9, v (), v () =9, v (3), v (3) =9. Dacănotăm P x = 3 ξ i v (i),găsim i=1 g (x) =45ξ1 +18ξ 9ξ3. Din întâmplare, vectorii v (i) au aceeaşi lungime, ceea ce nu se întâmplă în cazulgeneral. Dacănormăm vectorii v (i),adicăconsiderăm baza u (1) = 1 T 3 3 3, u () = 1 T 3 3 3, u (3) = 1 T şi notăm x = 3P η i u (i),găsim i=1 g (x) =5η1 +η η3, iar schimbarea corespunzătoare de coordonate este dată de formulele x 1 = 1 3 η 1 3 η + 3 η 3 x = 3 η η + 3 η 3. x 3 = 3 η η η 3 Din formula (1.184) rezultă şi următoarea consecinţă importantă: Teorema 1.30 Fie g : E n R oformăpătratică şi ϕ : E n E n transformarea liniară autoadjunctă, care satisface condiţia g (x) =hϕ (x), xi, x E n. Dacă v (1), v (),...,v (n)ª este o bază ortonormatăformatădin P vectori proprii ai lui ϕ şi notăm x = n ξ i v (i), g (x) se exprimă în această i=1 bază prinformula g (x) =λ 1 ξ1 + λ ξ + + λ n ξn, x E n (1.185) în careλ i, i = 1,n sunt autovalorile transformării ϕ.
71 7 CAPITOLUL 1. NOŢIUNI TEORETICE Oteoremăasemănătoare cu teorema lui Jacobi se poate formula pentru forme pătratice degenerate: Teorema 1.31 Fie g oformăpătratică derangr < n.există obazăîn V n în care minorii principali i 6=0,i = 1,r sunt nenuli şi în care forma pătratică g are expresia g (x) = 0 ξ1 + 1 ξ + + r 1 ξr (1.186) 1 r ξ i, i = 1,n fiind coordonatele vectorului x în baza determinată. Exerciţiul 1.4 Se consideră formapătratică f (x) =x 1 +x x 3 +6x 1 x x 1 x 3 +x x 3. Să se determine forma canonică folosind metoda Jacobi. Rezolvare. Să determinăm forma canonică folosindmetoda lui Jacobi. Matricea lui f este A = Calculăm minorii principali: 0 = 1, 1 =, = 3 3 = 5, 3 =deta =0.Deci, h (x) = 1 y 1 5 y. Fie B = e 1 = 1 0 0, e = 0 1 0, e 3 = ª baza canonică aspaţiului R 3. Căutăm o bază B 0 = {e 0 1, e 0, e 0 3} cu vectori de forma e 0 1 = c 11 e 1, e 0 = c 1 e 1 + c e, e 0 3 = c 31 e 1 + c 3 e + c 33 e 3. Fie g (x, y) polaraluif (x),g(x, y) =x 1 y 1 +3x 1 y x 1 y 3 +3x y 1 + x y + x y 3 x 3 y 1 + x 3 y x 3 y 3.Pentru determinarea coeficienţilor vom impune condiţiile: g (e 0 1, e 1 )=1 c 11 =1 c 11 = 1 ; ½ ½ g (e 0, e 1 )=0 g (e 0, e )=1 c1 +3c =0 3c 1 +c =1 c 1 = 3 5 c = ; 5 g (e 0 3, e 1 )=0 c 31 +3c 3 c 33 =0 c 31 = α g (e 0 3, e )=0 3c 31 +c 3 + c 33 =0 c 3 = α g (e 0 3, e 3 )=0 c 31 + c 3 c 33 =0 c 33 = α R Deoarece forma pătratică este degenerată, vectorul e 0 3 nu se determină univoc. Deci, e 0 1 = 1 e 1, e 0 = 3 5 e 1 5 e, iar al treilea vector al bazei poate fi, deexemplu,e 0 3 = e 1 + e + e 3. Astfel schimbarea de coordonate este:
72 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 73 x x = 0 x y 1 y. y Observăm căîn acest caz am obţinut signatura (1, 1, 1). i=1 j=1 Metoda Gauss - Jacobi de aducere la forma canonică. P Fie g (x) = n np a ij x i x j cu a ij = a ji oformăpătratică în R n. Presupunem cătoţi minorii principali i 6=0,i = 1,n.Căutăm ca prin operaţii asupra liniilor matricei A săobţinem o matrice care săaibă toate elementele de sub diagonala principală nule. Aceasta se poate obţine înmulţind liniile cu factori convenabili şi scăzând (adunând) din liniile care îi urmează, căutând să obţinem zerouri pe coloană. După ceobţinem zerouri pe prima coloană, găsim o matricede forma a 11 a 1 a 1n 0 b b n 0 b 3 b 3n 0 b n b nn. Primele două linii rămân neschimbate şi deoarece b 6=0(defaptb = ), înmulţimliniaadouacufactoriconvenabilişi scădem din cele ce îi 1 urmează, reuşind să obţinem zerouri pe toată coloana a doua, cu excepţia bineînţeles a primelor două elemente ale acestei coloane. Vom găsi acum o matrice de forma a 11 a 1 a 13 a 1n 0 b b 3 b n 0 0 c 33 b 3n, cu c 33 = 3 6= c n3 c nn Procedând în acestfel,ajungemîn final la o matrice pe care, dacă schimbăm notaţiile, o putem scrie în forma g 11 g 1 g 13 g 1n 0 g g 3 g n G = 0 0 g 33 g 3n, cu g ii = i,i= 1,n i g nn
73 74 CAPITOLUL 1. NOŢIUNI TEORETICE şi o vom numi forma gausiană a matricei simetrice A =(a ij ). Nu facem demonstraţia, care este relativ complicată, dardinpunctdevederepractic, lucrurile sunt simple. Făcând notaţiile ξ 1 = g 11 x 1 + g 1 x + + g 1n x n ξ = g x + + g n x n... ξ n = g nn x n se obţine pentru forma pătratică considerată g (x) = 1 g 11 ξ g ξ g nn ξ n, x R n. Exerciţiul 1.5 Să se aducă la forma canonică prin metoda Gauss - Jacobi, forma pătratică g (x) =x 1 +x x 3 6x 1 x +10x 1 x 3 +16x x 3. Rezolvare. Vom găsi 1 =1, = 7, 3 = 347 şi vom reda găsirea matricei G prin schema următoare A = = G Punând ξ 1 = x 1 3x +5x 3 ξ = 7x +3x 3 ξ 3 = x 3 obţinem g (x) = ξ ξ ξ 3. Se poate verifica rezultatul, prin înlocuirea variabilelor ξ i cu x i şi obţinem pentru g (x) expresiadinenunţ. Mai există un procedeu, cu totul elementar, datorat lui Gauss, care se bazează pe scrierea formei pătratice ca o combinaţie de pătrate ale unor polinoamedegradulîntâi în variabilele date. Vom arăta cum se face practic acest lucru, reluând g (x) din exemplul precedent: vom lua întâi numai
74 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 75 termenii care conţin variabila x 1, scriind g (x) = x 1 6x 1 x +10x 1 x 3 +x x 3 +16x x 3 = = (x 1 3x +5x 3 ) 9x 5x 3 +30x x 3 +x x 3 +16x x 3 = =(x 1 3x +5x 3 ) 7x +46x x 3 6x 3 = =(x 1 3x +5x 3 ) 7 µx 467 x x 3 6x 3 = " µ =(x 1 3x +5x 3 ) 7 x 3 # 7 x x 3 6x 3 = µ =(x 1 3x +5x 3 ) 7 x 3 7 x x 3. Acum, dacă notăm ξ 1 = x 1 3x +5x 3 ξ = x 3 7 x 3 ξ 3 = x 3 găsim g (x) =ξ1 7ξ ξ 3,decialtă expresie pentru aceeaşi g (x). Coeficienţii formeicanonice(sumădepătrate ale variabilelor) nu sunt unici, după cum se poate vedea şi din exemplul prezentat. Dar există ceva comun tuturor formelor canonice ale unei forme pătratice date. Anume, în oricare formă canonică, numărul pătratelor cu coeficienţi pozitivi este acelaşi. La fel, este invariant şi numărul coeficienţilor negativi. Are loc o teoremă importantă: Teorema 1.3 (Legea inerţiei pentru formele pătratice reale). Pentru orice formă pătratică f : V n V n R şi în orice bază canonică a sa, numărul coeficienţilor pozitivi, numărul coeficienţilor negativi, deci şi numărul coeficienţilor nuli se pastrează neschimbaţi. Demonstraţie (schiţă). Fie v (1), v (),...,v (n)ª şi u (1), u (),...,u (n)ª P două baze canonice pentru f. Notăm x = n P ξ i v (i) şi respectiv x = n ϕ i u (i) pentru un vector oarecare din V n şi fie f (x) =α 1 ξ1 + α ξ + + α p ξp α p+1 ξp+1 α p+ ξp+ α p+q ξp+q, i=1 i=1 (1.187)
75 76 CAPITOLUL 1. NOŢIUNI TEORETICE unde coeficienţii α i, i = 1,p+ q sunt pozitivi şi evident p + q n. Dacă p + q < n, înseamnă căexistăşi coeficenţi nuli, care însă nuaumaifost scrişi. Presupunem căîn a doua bază, avem f (x) =β 1 η1 + β η + + β r ηr β r+1 ηr+1 β r+ ηr+ β r+s ηr+s, (1.188) unde β i sunt pozitivi, i = 1,r+ s şi r + s n. Să presupunem p>r,adică numărul coeficienţilor pozitivi în primabazăestemaimaredecât într-a doua. Mulţimea de vectori v (1), v (),...,v (p), v (r+1), v (r+),...,v (n)ª este liniar dependentă, căci are p+(n r) =(p r)+n > nvectori. Deci există ocombinaţie liniarănulă c 1 v (1) + c v () + + c p v (p) + c 0 r+1v (r+1) + +c 0 r+v (r+) + + c 0 nv (n) (1.189) = θ, în caremăcar un coeficient este nul. Mai exact, există măcar un c i 6= 0, cu 1 i p şi măcar un c 0 j 6= 0, cu r + j n. Schimbând notaţiile, putem spune că există un vector v 6= θ, v = ξ 1 v (1) + ξ v () + + ξ p v (p) = η r+1 u (r+1) + η r+ u (r+) + + η n u (n),în care coeficienţii sunt anumite constante precizate şi măcar un ξ i 6= 0. Din (1.187), rezultă iar din (1.188), obţinem f (v) =α 1 ξ 1 + α ξ + + α p ξ p > 0 (1.190) f (v) = β r+1 η r+1 β r+s η r+s 0. (1.191) Contradicţia obţinută aratăcăipotezap>reste falsă. Schimbând rolurile bazelor, rezultă căşi ipoteza r > peste falsă. Prin urmare, p = r. Prin înmulţirea formei f cu ( 1), avem o nouă formăpătratică în care variabilele cu coeficient negativ devin variabile cu coeficient pozitiv şi deci q = s. Evidentcăsepăstrează şi numărul total de pătrate (cu coeficient nenul) în forma canonică. Acest număr se numeşte rangul formei pătratice şi coincide cu rangul matricei sale în oricebazădinv n. Altă noţiune foarte importantă relativ la formele pătratice este cea de formă pătratică reală pozitiv definită. Definiţia 1.36 Spunem că forma pătratică g : E n definită, dacă x E n, x 6= θ g (x) > 0. R este pozitiv Altfel spus, g = g (x) este pozitiv definită dacă ia numai valori pozitive, cu excepţia vectorului nul θ, pentru care g (θ) =0.
76 1.6. FORME LINIARE, BILINIARE ŞI PĂTRATICE 77 Teorema 1.33 Condiţia necesară şi suficientă caoformăpătratică g : E n R să fie pozitiv definită este ca toate autovalorile matricei sale să fie pozitive. Demonstraţie. Fie A =(a ij ) matricea formei pătratice g în obazădată ortonormată e (1), e (),...,e (n)ª din E n.dacăϕ = ϕ (x) este transformarea liniară ataşată formeig, adică transformarea liniară autoadjunctă ceare aceeaşi matrice A în baza dată, ştim că g (x) =hϕ (x), xi, x E n.ştim de asemenea că pentru transformarea ϕ, existăobază ortonormată formată din vectori proprii ai săi. Notăm această bază v (1), v (),...,v (n)ª şi scriem P x = n ξ i v (i).atunci,avem i=1 nx g (x) =λ 1 ξ1 + + λ n ξn = λ i ξi, x E n. i=1 (1.19) Suficienţa. Dacă toţi λ i > 0, este evident că x 6= θ rezultă g (x) > 0, deoarece există măcar un ξ i 6=0. Necesitatea. Presupunem g (x) este pozitiv definită. Dacă arexistaun λ i 0, pentru orice vector nenul x = ξ i v (i) am avea g (x) =λ i ξi 0, ceea ce este imposibil. Deci rezultă λ i > 0 pentru i = 1,n. Mai importantă esteînsă oaltă caracterizare a formei pătratice pozitiv definite,carenufaceapellagăsirea autovalorilor matricei A, lucruîn general dificil dacă n 3(trebuierezolvatăoecuaţie algebrică degrad 3). Teorema 1.34 (Sylvester). Fie f : V n V n R oformă biliniară simetrică, cu matricea A =(a ij ) într-o bază datădinv n. Necesar şi suficient ca forma pătratică g (x) =f (x, x) să fie pozitiv definită, este ca toţi minorii principali ai matricei A, săfiepozitivi 1 > 0, > 0,..., n > 0. (1.193) Demonstraţie. Dacă auloccondiţiile i 6=0,i = 1,n ştim să construim obazăcanonică, în careg (x) are forma g (x)= 0 1 ξ ξ n 1 n ξ n, x E n (1.194) în careξ i sunt coordonatele vectorului x în noua bază. Suficienţa condiţiei (1.193). Dacă toţi i > 0, în (1.194) toţi coeficienţii sunt pozitivi şi atunci este evident că x 6= θ g (x) > 0.
77 78 CAPITOLUL 1. NOŢIUNI TEORETICE Necesitatea condiţiei (1.193). Presupunem că g (x) este pozitiv definită. Notăm e (1), e (),...,e (n)ª baza dată, în careg (x) are matricea A =(a ij ). P Dacă facemnotaţia x = n ζ i e (i),avem i=1 nx nx g (x) = a ij ζ i ζ j, cu a ij = a ji, x V n. i=1 j=1 (1.195) Luând pe rând x = e (i),găsim g e (i) = a ii > 0, i = 1,n,adicătoate elementele de pe diagonala principală dina sunt pozitive. Presupunem acum căexistă un minor principal a 11 a 1 a 1i i = a 1 a a i =0. (1.196) a i1 a i a ii Considerăm sistemul algebric a 11 ζ 1 + a 1 ζ + + a 1i ζ i =0 a 1 ζ 1 + a ζ + + a i ζ i =0... a i1 ζ 1 + a i1 ζ + + a ii ζ i =0 (1.197) care admite cel puţin o soluţie nebanală ζ1, 0 ζ, 0..., ζi 0 (căci i =0). Notăm v = ζ1e 0 (1) + ζe 0 () + + ζi 0 e (i) 6=θ şi avem ix g (v) = ζp 0 ap1 ζ1 0 + a p ζ a pi ζi 0 =0 (1.198) p=1 ceea ce este absurd (contrazice ipoteza că g (x) este pozitiv definită). Prin urmare, toţi i 6=0şi atunci putem construi baza canonicăîn careg (x) se scrie în forma (1.194). Toţi coeficienţii trebuind să fie pozitivi, rezultă fără dificultate i > 0, i = 1,n. 1.7 Spaţiul liniar al vectorilor liberi Structura algebrică a spaţiului vectorilor liberi Fie spaţiul liniar R n = x x = x 1 x x n,xi R,i= 1,n ª. Definiţia 1.37 Cuaterna ordonată (a, b, c, d) de vectori din R n se numeşte paralelogram în R n dacă a b + c d = θ.(figura 1.1)
78 1.7. SPAŢIUL LINIAR AL VECTORILOR LIBERI 79 Figura 1.1. Definiţia 1.38 Perechile ordonate (a, b), (d, c) de vectori din spaţiul R n se numesc perechi ordonate echivalente şi notăm (a, b) (d, c) dacă cuaterna ordonată (a, b, c, d) este paralelogram. Teorema 1.35 Relaţia perechile ordonate (a, b), (d, c) de vectori din R n sunt perechi ordonate echivalente este o relaţiedeechivalenţă în R n R n. Demonstraţie. Verificăm proprietăţile relaţiei de echivalenţă: reflexivitatea, simetria şi tranzitivitatea. Reflexivitatea: (a, b) (a, b) a b + a b = θ evident; Simetria: (a, b) (d, c) (d, c) (a, b) (a, b) (d, c) a b+c d = θ d c+b a = θ (d, c) (a, b). Tranzitivitatea (Figura 1.): (a, b) (d, c), (d, c) (f, e) rezultă că (a, b) (f, e); dar (a, b) (d, c) a b + c d = θ (d, c) (f, e) d c + e f = θ. Atunci, adunând relaţiile de mai sus obţinem a b+e f = θ, echivalent cu (a, b) (f, e). Figura 1.. Observaţia 1.18 Relaţia de echivalenţă perechile ordonate (a, b), (d, c) de vectori din R n sunt perechi ordonate echivalente împarte mulţimea R n R n în clase de echivalenţă. Clasele de echivalenţă poartă denumirea de vectoriliberiasociaţi spaţiului R n. Un vector liber asociat spaţiului R n este o submulţime a spaţiului R n R n Claseledeechivalenţă sunt disjuncte. Fie (a, b) R n R n. Notăm u = {(d, c) R n R n (d, c) (a, b)}. Notăm vectorii liberi cu u, v, w,... Mulţimea vectorilor liberi asociaţi spaţiului liniar R n este notată cuv n.
79 80 CAPITOLUL 1. NOŢIUNI TEORETICE Dacă u este un vector liber asociat spaţiului R n şi (a, b) u, atunci (a, b) este un reprezentant al vectorului liber u şi punem acest fapt în evidenţă notând ab u pentru a sublinia notaţiile cunoscute din fizică. Elementul a R n se numeşte originea, iarb R n se numeşte extremitatea reprezentantului (a, b) a vectorului liber u. Spunem că ab este reprezentantul vectorului liber u aplicat în a. Vom numi puncte elementele spaţiului liniar R n Observaţia 1.19 Dacă ab u şi x R n rezultă căexistăuny R n astfel încât xy ab. Într-adevăr, xy ab x y + b a = θ y = x a + b. Această observaţienespunecăîn orice punct al lui R n putem aplica un vector reprezentant al unei clase de vectori liberi date. Definiţia 1.39 Fie ( u, v ) o pereche ordonată de vectori liberi oarecare asociaţi spaţiului V n, ab u şi ad v. Vectorul liber w al cărui reprezentant ac este definit prin condiţia ca (a, b, c, d) să fie paralelogram, deci c = a + b + d, se numeşte vectorul liber sumă al perechii ordonate ( u, v ) şi se notează w = u + v. (Figura 1.3) Operaţia internă pev n definită maisus+:v n V n V n se numeşte operaţia de adunare a vectorilor liberi Figura 1.3. Definiţia 1.40 Fie un vector liber oarecare u, ab u şi α R. Vectorul liber v al cărui reprezentant este vectorul ac unde c = a + α(b a) se numeşte vectorul liber produs cu scalarul α avectoruluiliber u şi se notează v = α u. Operaţia externă pe V n, : R V n V n se numeşte operaţie de înmulţire a unui scalar real cu un vector liber. Observaţia 1.0 Din Definiţia 1.40, c = a + α(b a) dacăşi numai dacă a c+αb αa = θ (a, c,αa, αb) este paralelogram (a, c) (αa, αb). Observaţia 1.1 Observăm că dacă ab u atunci ba u. Întradevăr, dacă în definiţia1.40punemα = 1 şi ab u iar ac u rezultă că c = a (b a) = a b + a a c + a b = 0 ac ba ba u.
80 1.7. SPAŢIUL LINIAR AL VECTORILOR LIBERI 81 Teorema 1.36 V n este spaţiu vectorial. Demonstraţie. Arătăm că suntsatisfăcute axiomele spaţiului liniar u, v, w V n :( u + v )+ w = u +( v + w ). Dacă ab u, ac v, ad w şi aa 1 u + v rezultă că(a, b, a 1, c) şi deci a b + a 1 c = θ a 1 = a + b + c. Dacă ac ( u + v )+ w (a, d, c, a 1 ) paralelogram implică a d+c a 1 = θ c = a+a 1 +d = a + b + c + d. Dacă ab v, ad w şi aa v + w (a, d, a, c) paralelogram a d + a c = θ a = a + d + c. Dacă aa 3 = u +( v + w ) (a, b, a 3, a ) paralelogram a b + a 3 a = θ a 3 = a + a + b = a + b + c + d. Comparând expresiile lui a 3 şi c (Figura 1.4) observăm că a 3 = c aa 3 = ac ( u + v )+ w = u +( v + w ). Figura V n : u V n u + 0 = 0 + u = u. Dacă ab 0, ac u şi ac 1 u + 0 (a, c, c 1, b) paralelogram a c+c 1 b = θ c 1 = a+b+c. Dar u + 0 = u c = c 1 a = b. Dacă ac 0 + u (a, b, c, c) paralelogram a b + c c = θ c = a + b + c. Dar 0 + u = u c = c a = b. Obţinem aa 0 u + 0 = 0 + u = u u V n, u V n : u +( u )=( u )+ u = 0. Dacă ab u, ac u, aa 0 aa u +( u ) (a, b, a, c) paralelogram a b + a c = θ a c = b a ac = ab u +( u )=( u )+ u = 0. Analog rezultăşi partea a doua a egalităţii u, v V n : u + v = v + u. Dacă ab u, ac v, aa 1 = u + v (a, b, a 1, c) paralelogram a b + a 1 c = θ a 1 = a + b + c; aa v + u (a, c, a, b) paralelogram a c + a b = θ a = a + b + c a 1 = a u + v = v + u. Din 1 1, 1, 1 3 şi 1 4 Rezultă că(v n, +) este grup abelian.
81 8 CAPITOLUL 1. NOŢIUNI TEORETICE 1. α R, u, v V n : α( u + v )=α u + α v. Dacă ab u, ac v atunci dacă aa 1 u + v rezultă că(a, b, a 1, c) paralelogram, deci a b + a 1 c = θ adică a 1 = a + b + c; dacă aa α( u + v ) a = a + α(a 1 a). Dacă aa 3 α u a 3 = a + α(b a); aa 4 α v a 4 = a + α(c a); dacă aa 5 α u +α v (a, a 3, a 5, a 4 ) paralelogram a a 3 +a 5 a 4 = θ a 5 = a+a 3 +a 4 = a+a+α(b a)+a+α(c a) =a+α(b a+c a) = a + α(a 1 a). Rezultă că a = a 5 α( u + v )=α u + α v.(figura 1.5) Figura α, β R, u V n :(α + β) u = α u + β u. Dacă ab u, aa 1 (α + β) u a 1 = a +(α + β)(b a). Dacă aa α u a = a + α(b a), aa 3 = β u a 3 = a + β(b a), aa 4 α u + β u (a, a, a 4, a 3 ) paralelogram a a + a 4 a 3 = θ a 4 = a+a +a 3 a 4 = a+a+α(b a)+a+β(b a) =a+(α+β)(b a) Rezultă că a 1 = a 4 (α + β) u = α u + β u.(figura 1.6) Figura α, β R, u V n :(αβ) u = α(β u ). Dacă ab u, aa 1 (αβ) u a 1 = a +(αβ)(b a). Dacă aa β u a = a + β(b a), aa 3 α(β u ) a 3 = a + α(a a) a 3 = a + α(a + β(b a) a) =a + αβ(b a). Rezultă că a 1 = a 3 (αβ) u = α(β u ). 4. u V n :1 u = u. Dacă ab u, aa 1 1 u a 1 = a +1(b a) =b 1 u = u. Rezultă că V n este spaţiu vectorial. Definiţia 1.41 Fie a, n b R n, a 6= b. Mulţimea x R n : α R, ax = α o ab
82 1.7. SPAŢIUL LINIAR AL VECTORILOR LIBERI 83 α se numeşte dreapta din R n care trece prin punctele distincte a, b.vectorii ab,α R,α6=0 se numesc vectori directori ai dreptei ce trece prin punctele a, b R n. În particular ab 6= 0 este un vector director al dreptei care trece prin punctele distincte a, b. Dreapta este un subspaţiu liniar al spaţiului vectorilor liberi V n. Definiţia 1.4 Vectorii liberi u, v se numesc vectori liberi coliniari dacă sistemul de vectori { u, v } este liniar dependent, adică există α R astfel încât v = α u. Definiţia 1.43 Vectorii liberi u, v, w V 3 se numesc vectori liberi coplanari dacă sistemul de vectori { u, v, w } este liniar dependent. Definiţia 1.44 Două dreptedinr n se numesc drepte paralele dacă vectorii lor directori sunt coliniari. Definiţia 1.45 Mulţimea dreptelor din R n care sunt paralele cu o dreaptă dată senumeşte direcţie în R n. Orice dreaptă, element al unei direcţii din R n,senumeşte reprezentant al acelei direcţii şi o determinăîn modunic. Observaţia 1. Pentru vectorul liber 0 nu se defineşte noţiunea de direcţie. Observaţia 1.3 Observăm că dacă(a, b, c, d) este paralelogram în R n cu vectorii a, b, c, d distincţi între ei, atunci a b + c d = θ a b = d c ab dc 6= 0 şi deci dreptele care trec prin punctele a, b şi d, c sunt paralele. La fel şi cele care trec prin a, d şi b, c. Teorema 1.37 Fie spaţiile vectoriale R n şi V n. Atunci funcţia f : R n V n, x R n : f(x) = θx, unde θ =( ) R n este o transformare liniară bijectivă (un izomorfism). Demonstraţie. Verificăm liniaritatea lui f. x, y R n : f(x + y) = θ(x + y). Fie aa 1 θ(x + y) a 1 = a + x + y; f(x) +f(y) = θx + θy, şi aa θx + θy a = a + x + y f(x + y) =f(x)+f(y). x R n, α R : f(αx) = θ(αx). Fie aa 1 = θ(αx) a 1 = a + αx θ şi aa = α (θx) a = a + α(x θ) f(αx) =αf(x). Injectivitatea. f(x) = θθ x = θ ker(f) = {θ}.(se foloseşte Exerciţiul 1.10). Surjectivitatea. θx V n y R n : f(y) = θx. Considerăm y = x.
83 84 CAPITOLUL 1. NOŢIUNI TEORETICE Teorema 1.38 Fie spaţiile vectoriale R n şi V n şi vectorii liberi i 1,..., i n din V n definiţi de relaţiile i 1 = θe 1,..., i n = θe n, unde {e 1,..., e n } este baza standard din R n, atunci vectorii i 1,..., i n formează obazăîn V n. Demonstraţie. Deoarece {e 1,..., e n } este baza standard din R n ea este un sistem de vectori liniar independenţi şi deoarece f este o transformare liniară bijectivă (estesuficient să fie injectivă) rezultă, utilizând exerciţiul 1.6, că vectorii i 1,..., i n sunt liniar independenţi, deci formează obazăîn V n. Definiţia 1.46 Dacă u este un vector liber din V n, atunci proprietatea lui u deaaveacareprezentanţi perechi ordonate de vectori din R n, se numeşte sensul vectorului liber u. Observaţia 1.4 Pentru vectorul liber 0 V n nu se defineşte noţiunea de sens. Dacă u şi v sunt vectori liberi coliniari şi v = α u,atunci u, v se numesc vectori liberi de acelaşi sens dacă α>0şi vectori liberi de sensuri opuse dacă α<0. Definiţia 1.47 Spaţiul vectorial V n este un spaţiu euclidian în raportcu produsul scalar standard real h u, v i = hx, yi definit pentru orice vectori liberi u, v V n, θx u, θy v, în membrul al doilea fiind produsul scalar din R n. De asemenea rezultă că k u k = p h u, u i şi se numeşte lungimea vectorului u. Definiţia 1.48 Fie punctele distincte a, b, c R n astfel încât vectorii ab şi ac să nufie coliniari.mulţimea n x R n : (α, β) R, ax = α ab + β o ac se numeşte plan din R n care trece prin punctele a, b, c sau planul din R n determinat de punctele a, b, c. Planul este un subspaţiu liniar al spaţiului vectorilor liberi V n. Definiţia 1.49 Fieplanuldeterminatdepuncteledistinctea, b, c R n astfel încât vectorii ab şi ac să nufie coliniari Direcţia unicădeterminată de un vector liber ortogonal simultan pe vectorii ab şi ac (deci pe plan) se numeşte direcţia normelelor planului care trece prin punctele a, b, c. O dreaptă a acestei direcţii se numeşte o normală a planului ce trece prin punctele a, b, c.
84 1.7. SPAŢIUL LINIAR AL VECTORILOR LIBERI 85 Definiţia 1.50 Numim unghiul a doi vectori u şi v, notat ^( u, v ), unghiul propriu dintre doi reperezentanţi ai acestor vectori liberi aplicaţi în acelaşi punct Spaţiul liniar V 3 Produsul scalar a doi vectori liberi Deoarece în spaţiul V 3 al vectorilor liberi sunt definite noţiunile de lungime a unui vector şi de unghi dintre doi vectori, putem defini un produs scalar pe V 3 pornind de la aceste noţiuni. Definiţia 1.51 Dacă u, v V 3 atunci produsul scalar al perechii de vectori liberi ( ½u, v ) este definit prin h u, k u kk v k cos ^( u, v ), dacă u 6= 0 şi v 6= 0, v i= 0, dacă u = 0 sau v = 0. (1.199) Dacă u V 3 atunci u n= x 1 i +x o j +x3 k,xi R,i= 1, 3. Coordonatele (x 1,x,x 3 )în baza, j, k se numesc coordonatele euclidiene i ale vectorului u, iar expresia u = x 1 i +x j +x3 k se numeşte expresia analitică a vectorului u. Se mai utilizează scrierea u =(x 1,x,x 3 ). Expresia analitică aprodusuluiscalar. nconsiderămo în spaţiului i liniar real V 3 baza ortonormată notatăprinb=, j, k. Observăm că h i, i i = 1, h j, j i = 1, h k, k i = 1, h i, j i = h j, i i = 0, h i, k i = h k, i i =0şi h j, k i = h k, j i =0. Folosind aceste relaţii şi înlocuind în produsul scalar pe u = x 1 i + x j + x3 k şi v = y1 i + y j + y3 k,obţinem h u, v i = hx 1 i +x j +x3 k,y1 i +y j +y3 k i = x1 y 1 +x y +x 3 y 3, de unde rezultă expresia analitică aprodusuluiscalar. Produsul vectorial a doi vectori liberi Definiţia 1.5 Dacă u, v V 3 atunci produsul vectorial aperechii ordonate de vectori liberi ( u, v ) este vectorul ½ u v definit prin u k u kk v ksin^( u, şi v sunt necoliniari v )e u ( u 6= 0 şi v 6= 0 ) v = ½ u şi v sunt coliniari 0 u = 0 sau (1.00) v = 0,
85 86 CAPITOLUL 1. NOŢIUNI TEORETICE unde e este un versor perpendicular pe u şi v astfel încât sistemul de vectori { u, v, n o i e} să fieobază la fel orientată cubazab=, j, k. Teorema 1.39 (Expresia n analitică o a produsului vectorial) Fie baza i ortonormată B=, j, k în V 3 şi fie u, v V 3. Dacă u = x 1 i + x j + x3 k, v = y1 i + y j + y3 k,xi,y i R, i= 1, 3 atunci i j k u v = x 1 x x 3 y 1 y y 3. (1.01) Demonstraţie. Ţinem seama de tabelul i j k i 0 k j. j k 0 i k j i 0 Atunci u v = ³x 1 i + x j + x3 k ³y 1 i + y j + y3 k = (x y 3 x 3 y ) i (x 1 y 3 x 3 y 1 ) j +(x 1 y x y 1 ) i j k k = x 1 x x 3 y 1 y y 3. Teorema 1.40 Vectorul u v definit în Definiţia1.5areurmătoarele proprietăţi: a) u v = 0 u k v ; b) Dacă u v 6= 0, atunci { u, v, u v }, în aceastăordine, formează o bază orientată pozitiv. c) Dacă u 6= 0 şi v 6= 0 k u v k = k u k k v k h u, v i (identitatea lui Lagrange); d) u v = v u ;(proprietatea de anticomutativitate) α( u v )=α u v = u α v, α R; u ( v + w )= u v + u w ; e) k u v k = A, unde A notează aria paralelogramului construit cu vectorii liberi u şi v. Demonstraţie. Fie vectorii u = x 1 i + x j + x3 k,xi R,i = 1, 3, v = y1 i + y j + y3 k,yi R, i= 1, 3.
86 1.7. SPAŢIUL LINIAR AL VECTORILOR LIBERI 87 a) u v = 0 x y 3 x 3 y =0 x 1 y 3 x 3 y 1 =0 x 1 y x y 1 =0 x 1 y 1 = x y = x 3 y 3 = 1 α (cu convenţia că anularea unui numitor este echivalentă cuanulareaşi a numărătorului respectiv). Rezultă y 1 = αx 1,y = αx,y 3 = αx 3 v = y 1 i + y j + y3 k = αx1 i + αx j + αx3 k = α(x1 i + x j + x3 k )=α u vectorii u, v sunt coliniari. b) Vectori u, v, u v sunt necoplanari deoarece u v şi u v u, u v n o v şi deci formează obază. Matricea de trecere de la baza i, j, k la baza { u, v, u v } este A = x 1 y 1 x y 3 x 3 y x y x 1 y 3 x 3 y 1 x 3 y 3 x 1 y x y 1 şi det(a) =(x y 3 x 3 y ) +(x 1 y 3 x 3 y 1 ) +(x 1 y x y 1 ) = k u v k > 0. c) k u v k = k u k k v k sin ^( u, v )= = k u k k v k k u k k v k cos ^( u, v )=k u k k v k h u, v i. d) Rezultă utilizând relaţia (1.01) şi proprietăţile determinanţilor. e) A = k u kk v k sin ^( u, v )=k u v k. Dublul produs vectorial Definiţia 1.53 Fiesistemuldevectoriliberi{ u, v, w }. Dublul produs vectorial al acestuia se defineşte ca fiind vectorul liber u ( v w ), în care ordinea vectorilor şi locul parantezelor este esenţial. Teorema 1.41 Fie sistemul de vectori liberi { u, v, w }. Atunci u ( v w )=h u, w i v h u, v i w. Demonstraţie. Dacă doi din vectorii daţi sunt coliniari, afirmaţia este evidentă. Într-adevăr, dacă v q w v w = 0 u ( v w )= 0. Dacă w = α v h u, w i v h u, v i w = h u,α v i v h u, v iα v = 0 şi analog pentru v = α u. Fie v w şi alegem baza i, j, k astfel încât u = x1 i + x j + x3 k v = y1 i. w = z1 i + z j Obţinem v i j k w = y z 1 z 0 = y 1z k.
87 88 CAPITOLUL 1. NOŢIUNI TEORETICE Calculăm u ( v i j k w )= x 1 x x y 1 z = x y 1 z i x1 y 1 z j. Pe de altă parte h u, w i v h u, v i w =(x 1 z 1 + x z )y 1 i x1 y 1 (z 1 i + z j ) = x z y 1 i x1 y 1 z j = u ( v w ). Observaţia 1.5 Produsul vectorial al vectorilor liberi nu este asociativ. Aceasta rezultă din faptul că ( u v ) w = w ( u v ) = h w, v i u + h w, u i v este un vector coplanar cu u şi v, iar u ( v w )estecoplanarcu v şi w. Deci, în general, ( u v ) w 6= u ( v w ). Produsul mixt Definiţia 1.54 Fie sistemul de vectori liberi { u, v, w }. Produsul mixt al acestui sistem de vectori este definit prin ( u, v, w )=h u, v w i. Teorema 1.4 Fiesistemuldevectoriliberi{ u, v, w }. Să searatecă a) ( u, v, w )=0dacă şi numai dacă vectorii sunt coplanari. b) Dacă vectorii nu sunt coplanari, modulul produsului mixt al sistemului de vectori { u, v, w }, ( u, v, w ), este volumul paralelipipedului construit pe cei trei vectori aplicaţi înacelaşi punct. c) Dacă atunci u = x1 i + x j + x3 k v = y1 i + y j + y3 k w = z1 i + z j + z3 k ( u, v, w )= x 1 x x 3 y 1 y y 3 z 1 z z 3. (1.0) d) ( u, v, w )=( v, w, u )=( w, u, v ) (produsul mixt este invariant la permutări circulare). Demonstraţie. a) ( u, v, w )=0 h u, v w i =0 u v w sau v q w sau u, v, w sunt coplanari. u = 0 sau v = 0 sau w = 0 b) Fie ( u, v, w ) 6= 0. Cu notaţiile de mai jos, ϕ 6= 90 0, avem h u, v w i = k u kk v w k cos ϕ = (aria bazei)(±înălţimea)
88 1.8. REPERE 89 ( u, v, w ) = (aria bazei)(înălţimea) = volumul paraleleipipedului construit pe cei trei vectori (Figura 1.7). Figura 1.7. c) ( u, v, w )=h u, v w i = x 1 (y z 3 y 3 z ) x (y 1 z 3 y 3 z 1 )+ x 1 x x 3 x 3 (y z 1 y 1 z )= y 1 y y 3 z 1 z z 3. Din punctul (b) rezultă condiţia de coplanaritate a trei vectori şi anume produsul lor mixt trebuie să fie egal cu zero. d) Rezultă folosind expresia produsului mixt (1.0) şi ţinând seama ca valoarea determinantului nu se schimbă dacă efectuăm permutări circulare asupra liniilor acestuia. Vom considera în celeceurmeazăspaţiile vectoriale ale vectorilor liberi din plan, V sau din spaţiu, V Repere Definiţia 1.55 Un reper înspaţiul vectorial V n este o pereche R =(O; B), unde O este un punct fixat numit originea reperului, iar B este o bază consideratăîn spaţiul vectorilor liberi V n. În mod frecvent se consideră B obază ortonormată. De obicei, se consideră toţi vectorii bazei B aplicaţi înacelaşi punct, punctul O. În plan se considerăîn modobişnuit reperul n R o =(O; i, j )undeo i R este un punct din plan fixat, iar B =, j obază ortonormată, iar în spaţiun R =(O; i o, j, k )undeo R 3 este un punct din spaţiu fixat, i iar B =, j, k obază ortonormată. În cazul spaţiului s-a convenit ca axa Ox să fie determinată depunctulo şi să aibădirecţia dată de vectorul i, axa Oy să fie determinată depunctulo şi să aibădirecţia dată de vectorul j, iar axa Oz să fie determinată de punctul O şi să aibădirecţia
89 90 CAPITOLUL 1. NOŢIUNI TEORETICE dată de vectorul k. Axele Ox, Oy, Oz se numesc axele reperului sau axedecoordonate.planul xoy este determinat de punctul O şi vectorii i, j, planul xoz este determinat de punctul O şi vectorii i, k iar planul zoy este determinat de punctul O şi vectorii k, j. Planele xoy, yoz, xoz se numesc planele reperului R sau planedecoordonate. Fie R =(O; B) unreperşi punctul M R n. Vectorul OM este numit vectorul de poziţie al punctului M faţă dereperulr. Notăm r = OM iar dacă există posibilitate de confuzie, notăm r M = OM şi vom folosi notaţia M( r M ). Dacă M R, atunci r M = x i + y j,xpoartă denumirea de abscisa, iary ordonata punctului M şi vom folosi notaţia M(x, y). Dacă M R 3, atunci r M = x i +y j +z k,xpoartă denumirea de abscisa, y ordonata şi z cota punctului M şi vom folosi notaţia M(x, y, z) şi numim (x, y, z) coordonatele punctului M. Exerciţiul 1.6 Să se scrie expresia vectorului M 1 M în reperul ortonormat R =(O; i, j, k )dinv 3 dacă sunt cunoscute coordonatele punctelor M 1 şi M, M 1 (x 1,y 1,z 1 ),M (x,y,z ). (Figura 1.8.) Rezolvare. OM 1 + M 1 M = OM M 1 M = OM OM 1, dar OM 1 = x 1 i + y1 j + z1 k, OM = x i + y j + z k M 1 M = (x x 1 ) i +(y y 1 ) j +(z z 1 ) k. Figura 1.8. Dacă R =(O; i, j, k ) este un reper şi M 1 ( r 1 ),M ( r )douăpuncte din R 3, atunci dist(m 1,M )=k r r 1 k. (1.03) sau, dacă M 1 (x 1,y 1,z 1 ),M (x,y,z ), atunci q dist(m 1,M )= (x x 1 ) +(y y 1 ) +(z z 1 ). Dacă M 1 ( r 1 ),M ( r )suntdouăpunctedinr,m 1 (x 1,y 1 ),M (x,y ) atunci q dist(m 1,M )= (x x 1 ) +(y y 1 ).
90 1.8. REPERE 91 Schimbarea reperelor înplan. Fie R =(O; i, j)unreperşi R 0 =(O 0 ; i 0, j 0 ) un alt reper. Trecerea de la reperul R la reperul R 0 (Figura 1.9) este dată de translaţia şi rotaţia OO 0 = x 0 i + y0 j ( i 0 = a 11 i + a1 j j 0 = a 1 i + a j (1.04) Figura 1.9. Aceată schimbare de repere poate fi scrisă matriceal astfel: dacă M( r ) atunci r = x 1 i + y1 j în reperul R =(O; i, j )şi M( r 0 ), r 0 = x 0 1 i 0 + y1 0 j 0 în reperul R 0 =(O 0 ; i 0, j 0 )atunci r = r 0 + OO 0 x 1 i + y1 j = x 0 1 i 0 +y1 0 j 0 +x 0 i +y0 j (Figura 1.9) şi daca înlocuim i0 şi j 0 cu expresia lor din relaţiile (1.04) şi ţinem seama de unicitatea descompunerii după vectorii µ bazei, obţinem: x1 = x µ a11 a 1 a 1 a µ x 0 1 x 0 + µ x0. y 0 Schimbarea reperelor în spaţiu. Fie R =(O; i, j, k ) un reper ortonormat drept şi R 0 =(O 0 ; i 0, j 0, k 0 ) un alt reper. Trecerea de la reperul R la reperul R 0 este dată de translaţia şi rotaţia OO 0 = x 0 i + y0 j + z0 k i 0 = a 11 i + a1 j + a31 k j 0 = a 1 i + a j + a3 k (1.05) k 0 = a 13 i + a3 j + a33 k
91 9 CAPITOLUL 1. NOŢIUNI TEORETICE unde A = a 11 a 1 a a 1 a a 3. a 31 a 3 a 33 Formula matriceală de schimbare a reperului se obţine printr-un raţionament analog ca în plan: x 1 x = A x0 1 x 0 + x 0 y 0 (1.06) x 3 x 0 3 z 0 Reamintim căîn cazul bazelor ortonormate matricea A de trecere de la obază la alta este o matrice ortogonală. Exerciţiul 1.7 Să sescrieecuaţia planului (π) determinat de un punct şi de normala la plan. Rezolvare. Fie punctul M 0 ( r 0 )şi N V 3, N 6= 0 normala la plan (Figura 1.10). Atunci un punct M( r )aparţine planului (π) dacăşi numai dacă M 0 M N, adică verifică ecuaţia: h N, r r 0 i =0. (1.07) Ecuaţia (1.07) se numeşte ecuaţia vectorială a planului determinat de un punct şi un vector normal la plan. Figura Exerciţiul 1.8 Fie un reper ortonormat R =(O; i, j, k )şi în raport cu acesta punctul M 0 (x 0,y 0,z 0 )şi N = A i + B j + C k 6= 0. Să se arate că punctul M(x, y, z) aparţine planului (π) determinat de punctul M 0 şi normala N la plan dacă şi numai dacă
92 1.8. REPERE 93 A(x x 0 )+B(y y 0 )+C(z z 0 ) = 0 (1.08) sau, notând D = (Ax 0 + By 0 + Cz 0 ), Ax + By + Cz + D =0. (1.09) Rezolvare. Punctul M (π) dacăşi numai dacă h N, r r 0 i =0. Dar r r 0 =(x x 0 ) i +(y y 0 ) j +(z z 0 ) k implică ecuaţia (1.08) care este echivalentă cuecuaţia (1.09) Exerciţiul 1.9 Fie, în raportcuunreperr =(O; i, j, k )şi planul (π) care conţine punctul M 0 ( r 0 )şi este paralel cu vectorii u, v V 3, vectori necoliniari, u v 6= 0. Să se scrie ecuaţia planului (π) determinat de un punct al său şi cei doi vectori necoliniari. Rezolvare. Un punct M( r )aparţine planului (π) dacăşi numai dacă vectorii u, v, M 0 M sunt coplanari (Figura 1.11). Condiţia de coplanaritate a celor trei vectori u, v, M 0 M = r r 0 se poate exprima prin faptul că produsul mixt al acestora este egal cu zero ( u, v, r r 0 )=0. (1.10) Figura Exerciţiul 1.30 Fie planele (π 1 ) A 1 x + B 1 y + C 1 z + D 1 =0, (π ) A x + B y + C z + D =0. Să se arate că: a) Planele coincid dacă şi numai dacă: A 1 A = B 1 B = C 1 C = D 1 D ; b) Planele sunt paralele dacă şi numai dacă: A 1 A = B 1 B = C 1 C 6= D 1 D ; c) Planele µ se intersectează dupăodreaptădacăşi numai dacă: A1 B rang 1 C 1 =. A B C
93 94 CAPITOLUL 1. NOŢIUNI TEORETICE Rezolvare. a) Planele coincid dacă şi numai dacă cele două ecuaţii au aceleaşi soluţii, ceea ce are loc dacă şi numai dacă coeficienţii acestora sunt proporţionali. b) Planele sunt paralele dacă şi numai dacă sistemul format din cele două ecuaţii µ este incompatibil, ceea ceµ se întâmplă dacăşi numai dacă A1 B rang 1 C 1 A1 B = 1şi rang 1 C 1 D 1 =. A B C A B C D c) Planele se intersectează dacăşi numai dacă sistemul format din cele două ecuaţii este compatibil, cu o infinitate simplă desoluţii, ceea ce are loc dacăµ şi numai dacă A1 B rang 1 C 1 =. A B C Exerciţiul 1.31 (Distanţa de la un punct la un plan) Fie planul (π) h N, r r 0 i =0şi M 1 ( r 1 ). Să sededucăformuladistanţei de la punctul M 1 la planul (π). h N, r 1 r 0 i dist(m 1, (π)) =. (1.11) N Rezolvare. (Figura 1.1) Dacă PunctulM 1 (π) atuncidist(m 1, (π)) = 0 şi M 0 M 1 se găseşte înplanul(π) rezultăcăh N, r 1 r 0 i =0, adică (1.11) are loc. Figura 1.1. Dacă M 1 / (π), fie u, v 6= 0 doivectoridin(π), necoliniari, u v 6= 0. Atunci volum paralelipiped ( M 0 M 1, u, v ) dist(m 1, (π)) = = aria bazei k u = v k h r 1 r 0, Ni =. N
94 1.8. REPERE 95 Unghiul a două plane. Definiţia 1.56 Fie un reper ortonormat R = (O; i, j, k ) şi planele (π 1 ), (π ) cu normalele N 1, N. Se numeşte unghiul format de planele (π 1 ), (π ) unghiul dintre vectorii normali N 1, N. Observaţia 1.6 Dacă notăm cu α unghiul dintre cele două plane,α = ((π\ 1 ), (π )), atunci D N1, E N cos α = N 1 N. (1.1) Exerciţiul 1.3 Fie un reper ortonormat R =(O; i, j, k )şi planele (π 1 ), (π ) de ecuaţii (π 1 ) A 1 x + B 1 y + C 1 z + D 1 =0 (π ) A x + B y + C z + D =0. Să se arate că (π 1 ) (π )dacăşi numai dacă normalele la plan sunt perpendiculare, adică A 1 A + B 1 B + C 1 C = 0; (1.13) Rezolvare. Formula (1.1) se poate rescrie, ţinând seama de ecuaţiile planelor şi de expresia vectorilor normali, de forma A 1 A + B 1 B + C 1 C cos α = p p,α= π cos α =0 A 1 + B1 + C1 A + B + C şi de aici rezultă (1.13). Exerciţiul 1.33 Fie, în raportcuunreperortonormatr =(O; i, j, k) din V 3,M 0 ( r 0 )şi u V 3, u 6= 0. Să se scrie ecuaţia dreptei determinată de punctul M 0 şi are vectorul director u. Figura 1.13.
95 96 CAPITOLUL 1. NOŢIUNI TEORETICE Rezolvare. (Figura 1.13) Un punct M( r )seaflă pe dreapta (d)conţinând M 0 şi care este paralelă cu u, dacă şi numai dacă (d) :( r r 0 ) u = 0, (1.14) echivalent cu (d) : r = r 0 + α u,α R. (1.15) M (d) M 0 M = α u r r 0 = α u vectorii r r 0 şi u sunt coliniari rezultă (1.14). Din r r 0 = α u (1.15). Ecuaţia (1.14) se numeşte ecuaţia vectorială a dreptei determinată de un punct şi de un vector director. Exerciţiul 1.34 (Dreaptacaintersecţiededouăplane)Fie,înraport cu un reper ortonormat R =(O; i, j, k ), M 0 ( r 0 )şi fie N 1, N V 3 doi vectori necoliniari, N 1 N 6= 0. Atunci un punct M( r )seaflă pe dreapta (d) conţinând M 0 şi perpendiculară pe vectorii N 1, N dacă şi numai dacă M 0 M N 1 şi M 0 M N adică ½ hn1, r r 0 i =0 h N, r. (1.16) r 0 i =0 Exerciţiul 1.35 (Perpendiculara comună) Fie două drepte neparalele (d 1 ): r = r 1 + αu 1, (d ): r = r + αu Să se scrie ecuaţia perpendicularei comune a acestora. Figura Rezolvare. (Figura 1.14). Fie M 0 (d 1 ), dreapta (d 1 )aredirecţia u 1. Prin M 0 ducem reprezentanţi ai vectorilor u 1 şi u. Punctul M 0 şi reprezentanţii direcţiilor u 1 şi u determină unplan(α). Proiectăm pe acest plan dreapta
96 1.8. REPERE 97 (d ), fie această proiecţie (d 0 ). Fie M 1 intersecţia dintre dreptele (d 1 )şi (d 0 ). Ducem prin M 1 perpendiculara pe planul (α) care intersectează (d )în M (M 1 şi (d )determină un plan perpendicular pe planul (α)). Aceasta va fi dreapta (d) acărei direcţieestedatăde u 1 u. Fie N 1 = u 1 ( u 1 u ) (normala planului determinat de M 1 M şi (d 1 )) şi N = u ( u 1 u ) (normala planului determinat de M 1 M şi (d )). Atunci dreapta (d) poatefi văzută ca intersecţie a două plane, planul determinat de normala N 1 şi care conţine dreapta (d 1 )şi punctul M şi planul determinat de normala N şi care conţine dreapta (d )şi punctul M 1. Ecuaţiile dreptei sunt ½ hn1, r r (d) 0 i =0 hn, r r 3 i =0. (1.17) unde r 0 este vectorul de poziţie al punctului M 0, iar r 3 este vectorul de poziţie al unui punct oarecare de pe dreapta (d ). Vom arăta că (d), dreapta determinată depunctelem 1 şi M este perpendiculară pe(d 1 )şi (d ). Un vector director al dreptei (d) este N 1 N = k u 1 u k ( u 1 u )şi cum u 1 u u 1, u 1 u u (d) (d 1 ), (d) (d ). Exerciţiul 1.36 (Distanţa dintre douădrepte) Oricare ar fi două drepte neparalele (d 1 ): r = r 1 + α u 1, (d ): r = r + α u distanţa dintre cele două drepteeste h M 1 M, u 1 u i dist(d 1,d )= k u 1. (1.18) u k Rezolvare. Fie dreptele: (d 1 ) determinată de punctul M 1 şi direcţia u1 şi (d )determinatădepunctulm şi direcţia u. Distanţa dintre cele două drepte este lungimea înălţimii paralelipipedului construit pe vectorii M 1 M, u 1, u. Baza paralelipipedului este formată pe vectorii u 1, u. Utilizăm Exerciţiul 1.4, b) Aplicaţii la studiul conicelor şi cudricelor Conice pe ecuaţii generale Fie reperul R =(O, i, j )în V.
97 98 CAPITOLUL 1. NOŢIUNI TEORETICE Definiţia 1.57 Conica este locul geomretric (Γ) al punctelor M din plan ale căror coordonate (x, y), în raport cu reperul ortonormat R, satisfac ecuaţia (Γ) : x y µ µ a 11 a 1 x a 1 a y + x y µ a 01 a 0 + a 00 =0, (1.19) unde a 11 + a 1 + a 6= 0,a ij R,i,j {0, 1, },i j. Ecuaţia (1.19) este scrierea matricealăaecuaţiei a 11 x +a 1 xy+a y + a 01 x+a 0 y +a 00 =0, ecuaţie de gradul doi în x şi y, în care cel puţin unul dintre coeficienţii termenilor de gradul al doilea, a 11,a 1,a este diferit de zero. Una din problemele importante rezolvate ale geometriei analitice constă în faptulcăadoveditcă orice conică poate fi adusă, printr-o schimbare convenabilă de reper la una din ecuaţiile: cerc: x +y = R, elipsă: x a +y b =1, x hiperbolă: a y b = 1, parabolă: y = px, două drepte concurente: x a y b =0, două drepte paralele: x a =0, două drepte confundate x =0, un punct: x a + y x =0, mulţimea vidă: b a + y b +1=0. Utilizând rotaţia şi translaţia realizămoschimbaredereperdelareperul R =(O, i, j ) la un reper adecvat la fel orientat cu reperul R, numitreper canonic, faţă de care conica (1.19) să aibă una din ecuaţiiledemaisus. Tipul conicei (1.19) este determinat de expresia termenilor de grad doi, adică deformapătratică q( x )= x y µ µ a 11 a 1 x, a 1 a y unde x =x i + y j. Problema care ne propunem să orezolvăm: să găsim un reper în raport cu care ecuaţia (1.19) să aibăoformăcât mai simplă. Vom studia mai întâi forma pătratică q şi o vom aduce la forma canonică. Dacă a 1 = 0 matricea formei pătratice are forma diagonală şi se trece direct la efectuarea translaţiei. Dacă a 1 6=0sefacemaiîntâi o rotaţie. Prezentăm în continuare modul în care se efectuează rotaţia. n o i Matricea formei pătratice (q) B, în bazab =, j este o matrice simetrică. Ea este întotdeauna diagonalizabilă, deci există obază ortonormată formată din vectori proprii (conform Observaţiei 1.14) ai matricei
98 1.8. REPERE 99 simetrice. Acesteia îi ataşăm ecuaţia caracteristică a11 λ a 1 a λ =0 λ (a 11 + a )λ + a 11 a a 1 =0 a 1 ale cărei rădăcini sunt întodeauna reale (conform Teoremei 1.17). Facem observaţia că nu putem avea λ 1 = λ = 0 deoarece aceasta implică a 11 = a 1 = a =0, contrar ipotezei. Corespunzător valorilor proprii λ 1 şi λ avem vectorii proprii { u 1, u }. Fie e 1 = 1 k u 1, e = 1 u 1 k k u versorii vectorilor proprii astfel încât u k e1 = c 11 i + c1 j, e = c 1 i + c j. Matricea de trecere de la baza B = n o µ i, j la baza B 0 = { e 1, c11 c e } este matricea C = 1 şi aceasta c 1 c este ortogonală. Matricea C trebuie să fie astfel construită încât det C =1 (avem în vedere posibilitatea înlocuirii unuia din versori prin opusul său sau renumerotarea acestora) pentru a fi la fel orientată cubazab. Versorii { e 1, e } astfel construiţi dau direcţiile noilor axe Ox 0 şi respectiv Oy 0, iar rotaţia µ x y = µ c11 c 1 c 1 c µ x 0 y 0 reduce forma pătratică q la forma canonică λ 1 (x 0 ) + λ (y 0 ). În reperul R 0 =(O, e 1, e )ecuaţia(1.19)vaaveaforma: (1.0) λ 1 (x 0 ) + λ (y 0 ) +a 0 01x 0 +a 0 0y 0 + a 00 =0. (1.1) Cazul I: formapătratică q are rangul (λ 1 λ 6=0). Ecuaţia (1.1) devine, prin restângerea pătratelelor, de forma µ λ 1 (x 0 + a0 01 ) + λ (y 0 + a0 0 a ) 0 µ = 01 a a 00. λ 1 λ a 0 00 = Prin translaţia µ µ x 0 X y 0 = Y + λ 1 a0 10 λ 1 a0 0 λ λ şi notând µ a 0 µ 01 a a 00, ecuaţia (1.19) va avea în reperul R 00 = λ 1 (O 0, e 1, e )forma λ λ 1 X + λ Y = a (1.)
99 100 CAPITOLUL 1. NOŢIUNI TEORETICE µ Originea noului reper O 0 are coordonatele a0 01, a0 0 în reperul λ 1 λ R 0 =(O, e 1, e )şi aplicând relaţiile (1.0) obţinem coordonatele în reperul iniţial. Ecuaţia (1.) arată că O 0 X şi O 0 Y suntaxedesimetrieale conicei, iar O 0 este centru de simetrie. Rezultă căîn acest caz conica are centru de simetrie. Dacă a 0 00 =0şi λ 1 λ > 0 conica se reduce la un singur punct, centrul său O 0, iar dacă a 0 00 =0şi λ 1 λ < 0conicareprezintădouă drepte secante care trec prin punctul O 0. Dacă a = 0, împărţind prin a 0 00 şi notând a 0 00 λ 1 = a, a 0 00 λ = b,a>0,b>0, ecuaţia (1.) devine: X ε 1 a + ε Y b =1 unde ε 1 = ±1,ε = ±1. Dacă ε 1 = ε = 1 conica este o elipsă. Dacă ε 1 = ε = 1 conicaestemulţimea vidă. Dacă ε 1 ε = 1 conicaesteo hiperbolă. Cazul II: forma pătratică q are rangul 1 (sau λ 1 = 0 sau λ = 0). Presupunem că λ 1 =0şi λ 6=0. Ecuaţia (1.19) se poate scrie µ a 0 0 =0. (1.3) λ (y 0 + a0 01 ) +a 0 λ 01x 0 + a 00 λ Dacă a = 0 conica este o parabolă. Ecuaţia (1.3) devine µ a 0 a 00 0 λ (y 0 + a0 0 ) +a 0 λ 01 λ x0 + =0. Prin translaţia µ µ x 0 X y 0 = Y + a 0 01 a 00 µ a 0 0 a 0 01 a0 0 λ λ ecuaţia (1.19) va avea forma în reperulr 00 =(O 0, e 1, e ) λ Y +a 0 01X =0. (1.4)
100 1.8. REPERE 101 Forma ecuaţiei (1.4) arată că, în cazulîn care una din valorile proprii este nulă, conica admite o axă de simetrie, în acest caz O 0 X. Dacă a 0 01 = 0 ecuaţia (1.3) devine µ λ (y 0 + a0 01 a ) 0 + a 00 0 =0. (1.5) λ λ µ a 0 Dacă a 00 0 = 0 atunci ecuaţia reprezintă douădreptecarecoincid. λ µ Ã a 0 µ! Dacă a 00 0 a 0 6=0şi λ a 00 0 < 0ecuaţia reprezintă λ λ µ! a 0 două drepte paralele. Dacă λ Ãa 00 0 > 0ecuaţia reprezintă mulţimea vidă. Exerciţiul 1.37 Să seaducălaformacanonicăconica 5x +8xy +5y 18x 18y +9=0 şi să se reprezinte grafic. Rezolvare. Scriem matriceal ecuaţia conicei: µ µ 5 4 x x y + x y µ 9 +9=0 4 5 y 9 µ 5 4 Matricea formei pătratice este. Deoarece rangul matricei formei pătratice este, conica este cu centru. Ecuaţia caracteristică amatricei formei pătratice este λ 10λ +9=0 λ 1 =1,λ = Vectorii proprii sunt u 1 = i j, şi u = i + j, iar versorii corespunzători sunt ³ e 1 = i 1 j şi ³ e = i 1 + j. Ã! 1 1 Matricea de rotaţie este: C = 1 1, det C =1. Scriem rotaţia Ã! 1 µ 1 = x y 0. În urma rotaţiei ecuaţia conicei devine µ x y Ã! 1 1 µ x 0 y x 0 y 0 Ã ! µ 9 9 λ Ã =0! µ x 0 y 0 +
101 10 CAPITOLUL 1. NOŢIUNI TEORETICE x 0 y 0 µ µ x 0 y 0 + x 0 y 0 µ =0 (x 0 ) +9(y 0 ) 18y 0 +9=0 (x 0 ) +9 y 0 9=0. Centrul conicei este O 0 (0, ), coordonatele sale fiind date în reperul R 0 =(O; e 1, e ). În urma translaţiei µ µ x 0 X y 0 = Y + µ 0, se obţine ecuaţia X +9Y 9=0 X 9 + Y 1=0 Conica este o elipsă. Coordonatele lui O 0 înraportcureperuliniţial sunt: µ x0 y 0 = Ã ! µ 0 µ 1 = 1 În cele ce urmează prezentăm rotaţia şi translaţia axelor şi desenăm în noul reper graficul conicei. Rotaţia sistemului de axe: reperul R =(O; i, j ) trece în reperul R 0 =(O; e 1, e ). Ecuaţia dreptei care trece prin origine şi are direcţia e 1 este: x = y, iar ecuaţia dreptei care trece prin origine şi are direcţia e este x = y. Sensul axelor (Ox 0,Oy 0 ) este dat de vectorii e 1, e. Translaţia sistemului de axe: reperul R 0 = (O, e 1, e ) trece în reperul R 00 =(O 0, e 1, e ). Ecuaţiile dreptelor care trec prin O 0 (1, 1) şi au direcţiile e 1 respectiv e sunt: x = y +şi respectiv y = x. În acest ultim reper trasăm graficul elipsei va fi (Figura 1.15):. Figura Exerciţiul 1.38 Să seaducă la forma canonică conica 3x 4xy x +4y 3=0 şi să se traseze graficul. Rezolvare. Scriem matriceal ecuaţia conicei: µ µ 3 x x y + x y µ 1 3=0 0 y
102 1.8. REPERE 103 µ 3 Matricea formei pătratice este. Deoarece rangul matricei 0 formei pătratice este, conica este cu centru. Ecuaţia caracteristică este λ 3λ 4 =0 λ 1 = 1,λ =4. Vectorii proprii şi versorii corespunzători sunt: u1 = i + j ³ e 1 = i j şi u = i + j e = 1 5 ³ i + j. Ã! 1 Matricea de rotaţie este: C = , det C =1. Scriem rotaţia 5 µ Ã! 1 µ x = 5 5 x 0 y y 0. În urma rotaţiei şi a restrângerii pătratelor ecuaţia conicei devine: x 0 y 0 Ã Ã x 0 y ! µ Ã! 1 µ x y 0 +! µ 1 3=0 (x ) +4(y ) =0. Centrul conicei este O 0 ( 3 5, 1 5 ), coordonatele sale fiind date în reperul R 0 =(O; e 1, x µ µ Ã! 0 X e ). Facem translaţia y 0 = + şi Y obţinem X +4Y =0 X + Y 1 1=0 Conica este o hiperbolă. Coordonatele lui O 0 în raport cu reperul iniţial sunt: µ Ã!Ã! 1 x0 = y µ = În cele ce urmează prezentăm rotaţia şi translaţia axelor şi desenăm în noul reper graficul conicei. Rotaţia sistemului de axe: reperulr =(O; i, j ) trece în reperul R 0 =(O, e 1, e ). Ecuaţia dreptei care trece prin origine şi are direcţia e 1 este: x = y, iar ecuaţia dreptei care trece prin origine şi are direcţia e este x = y. Sensul axelor (Ox 0,Oy 0 )estedatdevectorii e 1, e.
103 104 CAPITOLUL 1. NOŢIUNI TEORETICE Translaţia sistemului de axe: reperul R 0 = (O, e 1, e ) trece în reperul R 00 =(O 0, e 1, e ). Ecuaţiile dreptelor care trec prin O 0 (1, 1) şi au direcţiile e 1 respectiv e sunt: x = y +1 şi respectiv x = y +3. În acest ultim reper graficul conicei va fi (figura 1.16): Figura Exerciţiul 1.39 Să seaducă la forma canonică şi să se deseneze conica: x 4xy +4y 6x +y +1=0. Rezolvare. Scriem matriceal ecuaţia conicei: µ µ 1 x x y + x y µ 3 +1=0 4 y 1 µ 1 Matricea formei pătratice este. Deoarece rangul matricei 4 formei pătratice este 1, conica este fără centru. Ecuaţia caracteristică este λ 5λ =0 λ 1 =0,λ =5. Vectorii proprii sunt pentru λ 1 =0, u 1 = i + j cu versorul e 1 = 1 5 ³ i + j, iar pentru λ =5, u = i j cu versorul ³ e = i 1 5 j. Ã! 1 5 Matricea de rotaţie C = 5 1 se modifică deoarece det C = Pentru ca det C =1schimbăm sensul vectorului e, e = 1 5 ³ i + j, Ã! 1 deci matricea de rotaţie va fi C = Scriem rotaţia 5 µ Ã! 1 µ x = 5 5 x 0 y y 0. În urma rotaţiei şi a restrângerii pătratelor µ ecuaţia µ conicei devine µ 5(y ) x 0 x 0 X 0 5=0. Efectuăm translaţiaţia y 0 = + 1 Y şi 5
104 1.8. REPERE 105 obţinem ecuaţia 5Y X 5=0 Y = 5 X. Vârful parabolei va fi în punctul O 0 1 (0, 5 ), coordonatele sale fiind date în reperulr 0 =(O; e 1, e ). Coordonatele lui O 0 în raport cu reperul iniţial sunt: Ã = y 0 µ x ! µ = µ Trasarea graficului: Rotaţia sitemului de axe: reperul R =(O; i, j ) trece în reperul R 0 =(O, e 1, e ). Ecuaţia dreptei care trece prin origine şi are direcţia dată de vectorul e 1 este: x =y, iar ecuaţia dreptei care trece prin origine şi are direcţia e este x = y. Sensul axelor (Ox 0,Oy 0 ) este dat de vectorii e1, e. Translaţia sistemului de axe: reperulr 0 =(O, e 1, e ) trece în reperul R 00 =(O 0, e 1, e ), unde O 0 va fi vârful parabolei.ecuaţiile axelor translate vor fi: x y 1=0şi x + y =0. Cele două sisteme de axe le trasăm pe acelaşi grafic. În acest ultim reper trasăm graficul parabolei (Figura 1.17):. Figura Exerciţiul 1.40 Să seaducălaformacanonicăşi să se deseneze conica: x +xy + y +x +y 3=0. Rezolvare. Scriem matriceal ecuaţia conicei: µ µ 1 1 x x y + x y µ 1 3=0 1 1 y 1 µ 1 1 Matricea formei pătratice este. Deoarece rangul matricei formei 1 1 pătratice este 1, conica este fără centru. Ecuaţia caracteristică esteλ λ =0 λ 1 =0,λ =. Vectorii proprii şi versorii corespunzători sunt: u1 = i j ³ e 1 = i 1 j, u = i + j ³ e = i 1 + j. Matricea de rotaţie C = Ã ! are det C = 1. Scriem rotaţia
105 106 CAPITOLUL 1. NOŢIUNI TEORETICE µ x y = Ã ! µ x 0 y 0. În urma rotaţiei ecuaţia conicei devine (y 0 ) +y 0 3=0 y y 0 1 =0. Rezultă căecuaţia reprezintă douădrepteparalele. Înlocuim y 0 din expresia rotaţiei, y 0 = 1 x + 1 y în ecuaţia conicei rotită, obţinem ecuaţiile celor două drepte x+y+3 = 0,x+y 1 =0şi le reprezentăm graficîn sistemuliniţial (Figura 1.18):. Figura Cuadrice pe ecuaţii generale Oproblemă similară se pune pentru suprafeţe din V 3 reprezentate prin ecuaţii algebrice de gradul al doilea. Fie reperul R =(O, i, j, k )în V 3. Definiţia 1.58 Cudrica este locul geometric al punctelor din spaţiu ale căror coordonate (x, y, z) în raport cu reperul R, satisfac ecuaţia (Σ) : x y z a 11 a 1 a 13 x a 1 a a 3 y + a 13 a 3 a 33 z + x y z a 01 a 0 (1.6) + a 00 =0, a 03 unde a 11 + a 1 + a 13 + a + a 3 + a 33 6= 0,a ij R,i,j {0, 1,, 3},i j. Ecuaţia (1.6) este scrierea matriceală aecuaţiei a 11 x +a y +a 33 z +a 1 xy+a 13 xz+a 3 yz+a 01 x+a 0 y+a 03 z+a 00 =0, ecuaţie degraduldoiîn x, y şi z, în carecelpuţin unul dintre coeficienţii termenilor de gradul al doilea a 11,a,a 33,a 1,a 13,a 3 este diferit de zero. Problema care ne propunem să orezolvăm: să găsim un reper în raport cu care ecuaţia (1.6) să aibăoformăcât mai simplă.
106 1.8. REPERE 107 Vom studia mai întâi forma pătratică q şi o vom aduce la forma canonică. Tipul cuadricei (1.6) este determinat de expresia termenilor de grad doi, adică deformapătratică q( x )= x y z a 11 a 1 a 13 a 1 a a 3 a 13 a 3 a 33 x y z unde x =x i + y j + z k. Conform celor studiate, există obază ortonormată în V 3 formată din vectori proprii ai matricei formei pătratice, care este o matrice simetrică, în raport cu care forma pătratică are forma canonică. Calculăm valorile proprii λ 1,λ,λ 3 şi vectorii proprii corespunzători, determinăm baza ortonormată { e 1, e, e 3 } formată din vectori proprii. Fie C matricea de trecere de la n o i baza, j, k la baza { e 1, e, e 3 }. Aceasta va fi matricea de rotaţie şi o alegem în aşa fel încât det C =1. În caz contrar schimbăm orientarea unui vector dintre vectorii { e 1, e, e 3 }. Versorii { e 1, e, e 3 } vor da direcţiile axelor Ox 0,Oy 0,Oz 0 iarrotaţia x x 0 y = C y 0 (1.7) z z 0 reduce forma pătratică laformacanonică λ 1 (x 0 ) + λ (y 0 ) + λ 3 (z 0 ). În reperul R =(O, e 1, e, e 3 ) ecuaţia (1.6) va avea forma λ 1 (x 0 ) + λ (y 0 ) + λ 3 (z 0 ) +a 0 01x 0 +a 0 0y 0 +a 0 03z 0 + a 00 =0. (1.8) Cazul I: forma pătratuică q are rangul 3 (λ 1 λ λ 3 6=0). Ecuaţia (1.1) devine, prin restângerea pătratelelor: λ 1 (x 0 + a0 01 ) + λ (y 0 + a0 0 ) + λ 3 (z 0 + a0 03 ) = λ 1 λ λ 3 µ a 0 µ = 01 a 0 µ + 0 a a 00. (1.9) λ 1 λ λ µ 3 a 0 µ Notăm a 0 00 = 01 a 0 µ + 0 a a 00. Prin translaţia λ 1 x0 y 0 = X Y + z 0 Z λ a0 01 λ 1 a0 0 λ a0 03 λ 3 R 0 =(O 0, e 1, e, e 3 ), forma: λ 3. ecuaţia (1.6) va căpăta în reperul
107 108 CAPITOLUL 1. NOŢIUNI TEORETICE λ 1 X + λ Y + λ 3 Z = a 0 00 (1.30) µ Originea noului reper O 0 va avea coordonatele a0 01, a0 0, a0 03 în λ 1 λ λ 3 reperul R =(O, e 1, e, e 3 )şi aplicând (1.7) obţinem coordonatele lui O 0 în reperul iniţial. Dacă a 0 00 =0şi λ 1,λ,λ 3 au acelaşi semn, cuadrica se reduce la un singur punct, centrul său. Dacă a 0 00 =0şi λ 1,λ,λ 3 nu au acelaşi semn, cuadrica este un con cu centrul în O 0. Dacă a = 0putemîmpărţi cu a 0 00 şi notăm a 0 00 λ 1 = a, a 0 00 λ = b, a 0 00 λ 3 = c,a>0,b>0,c>0. Ecuaţia (1.30) va avea forma X ε 1 a + ε Y b + ε Z 3 c =1, cu ε 1,ε,ε 3 { 1, 1}. Dacă ε 1 = ε = ε 3 =1, cudrica este un elipsoid. Dacă doi dintre aceştia sunt egali cu 1, de exemplu ε 1 = ε =1, iar ε 3 = 1, cudrica este un hiperboloid cu o singură pânză. Dacă doidintreeisuntegalicu-1iar celălalt este egal cu 1, cuadrica este un hiperboloid cu două pânze. Dacă ε 1 = ε = ε 3 = 1, cuadrica este mulţimea vidă. Cazul II: formapătratică q are rangul (una din valorile proprii este zero). Presupunem că λ 1 6=0,λ 6=0,λ 3 =0. Ecuaţia (1.9) poate fi scrisă sub forma µ a 0 µ 01 a a 00. λ 1 (x 0 + a0 01 ) + λ (y 0 + a0 0 ) +a 0 λ 1 λ 03z = λ 1 µ a 0 µ Notăm a 0 00 = 01 a a 00. Prin translaţia λ 1 x0 y 0 = X Y + z 0 Z λ a0 01 λ 1 a0 0 λ 0 R 0 =(O 0, e 1, e, e 3 ), forma: λ ecuaţia (1.6) va căpăta în sistemul λ 1 (x 0 + a0 01 λ 1 ) + λ (y 0 + a0 0 λ ) +a 0 03z 0 = a 0 00.
108 1.8. REPERE 109 µ a0 01, 0 λ Originea noului reper O 0 va avea coordonatele, a0 0 în reperul R =(O, e 1, e, e 3 )şi aplicând (1.7) obţinem coordonatele lui O 0 λ 1 în reperul iniţial. Pentru a 0 03 =0ecuaţia se reduce la λ 1 X + λ Y = a 0 00 (1.31) Dacă a 0 00 =0şi λ 1 λ > 0, cuadrica se reduce la mulţimea punctelor axei O 0 Z. Dacă a 0 00 =0şi λ 1 λ < 0, cuadrica se reduce la două plane secante, intersecţia lor fiind axa O 0 Z. Dacă a = 0prinîmpărţirea la a 0 00 ecuaţia (1.31) se scrie sub forma: γ 1 X + γ Y =1,γ 1 γ 6=0. Cuadrica este un cilindru (eliptic dacă γ 1 γ > 0, hiperbolic dacă γ 1 γ < 0) cu generatoarele paralele cu axa O 0 Z. Cazul III: formapătratică q are rangul 1 (două din valorile proprii sunt zero). Presupunem că λ 1 6=0,λ = λ 3 =0. Ecuaţia (1.9) poate fi scrisă sub forma µ λ 1 (x 0 + a0 01 a ) +a 0 λ 0y 0 +a 0 03z 0 0 = 01 a λ 1 µ a 0 Notăm a 0 00 = 01 a 00. Prin translaţia λ 1 x 0 y 0 z 0 = X Y Z + a0 01 λ ecuaţia (1.6) va căpăta în sistemul R 0 =(O 0, e 1, e, e 3 ), forma: λ 1 X +a 0 0Y +a 0 03Z = a µ Originea noului reper O 0 va avea coordonatele a0 01, 0, 0 în reperul λ 1 R =(O, e 1, e, e 3 )şi aplicând (1.7) obţinem coordonatele lui O 0 în reperul iniţial. Dacă a 0 0 6= 0saua = 0 cuadrica este un cilindru cu generatoarele paralele cu dreapta de ecuaţii X =0,a 0 0Y + a 0 03Z = a Dacă a 0 0 =0,a 0 03 =0ecuaţia cuadricei se reduce la λ 1 X = a Dacă λ 1 a 0 00 > 0 cuadrica este formată dindouă plane paralele. Dacă λ 1 a 0 00 < 0 nu există puncte reale care să satisfacăecuaţia. Dacă λ 1 a 0 00 =0 a 0 00 =0 ecuaţia cuadricei se reduce la ecuaţia adouă plane care coincid.
109 110 CAPITOLUL 1. NOŢIUNI TEORETICE Exerciţiul 1.41 Se consideră cuadrica care în reperul R =(O, i, j, k ) are ecuaţia: x y z x y + x y z = z 4 Să se aducă cuadrica la forma canonică şi să se precizeze natura ei. Rezolvare. Fie A matricea formei pătratice A = Calculăm polinomul caracteristic P (λ) =λ 3 18λ +99λ 16. Valorile proprii sunt λ 1 =9,λ =6,λ 3 =3. Pentru λ 1 = 9 vectorul propriu este u 1 = 1 T, pentru λ = 6 vectorul propriu este u = T 1, pentru λ3 =3vectorulpropriueste u 3 = 1 T. Baza ortonormată formată din vectorii proprii este e 1 = 1 T 3 3 3, e = 1 T 3 3 3, e 3 = 1 T Cu matricea de rotaţie C = cu det C =1. efectuăm rotaţia x y = 1 x0 y z z şi obţinem ecuaţia 9(x 0 ) +6(y 0 ) +3(z 0 ) 36x 0 +6z = 0 9(x 0 ) +6y 0 +3(z 0 +1) 3 = 0 Efectuăm translaţia x0 y 0 = X Y + 0 z 0 Z 1 şi obţinem ecuaţia 9X +6Y +3Z 3=0 3X +Y + Z 1=0 Suprafaţa este un elipsoid. Centrul elipsoidului în reperulr = (O, u 1, u, u 3 )esteo 0 (, 0, 1). Coordonatele centrului cuadricei în raport cu reperul R sunt: 3 3
110 1.8. REPERE 111 x y = = 1. z Exerciţiul 1.4 Se consideră cuadrica care în reperulr =(O, i, j, k ) are ecuaţia: x y z x y + x y z = z 4 Să seaducă cuadrica la forma canonică şi să se precizeze natura ei. Rezolvare. Fie A matricea formei pătratice A = Calculăm polinomul caracteristic P (λ) =λ 3 3λ. Valorile proprii sunt λ 1 = λ = 1,λ 3 =. Vectorii proprii sunt: pentru λ 1 = 1 vectorii proprii sunt u 1 = T şi u = T, pentru λ3 = vectorul propriu este u 3 = T. Observăm că vectorii proprii corespunzători valorii proprii λ 1 = 1 nu sunt ortogonali. Îi ortogonalizăm aplicând procedeul Gram-Schmidt. v 1 = T, v = u + α 1 v 1,α 1 = h u, v 1 i h v 1, = 1, v 1 i v = T 1 T = T Baza ortonormatăformată din vectorii proprii este e 1 =³ T, ³ e = 1 T ³ , e 3 = 1 Cu matricea de rotaţia C = T cu det C =1. efectuăm rotaţia 1 x y x 0 = y 0 z z 0 şi obţinem ecuaţia (x 0 ) (y 0 ) +(z 0 ) 3x 0 +z 0 z 0 +6 = 0 (x 0 + 3) (y 0 +1) +(z 0 + ) +6 = 0
111 11 CAPITOLUL 1. NOŢIUNI TEORETICE Efectuăm translaţia x0 y 0 = X Y + z 0 Z şi obţinem ecuaţia 3 1 X Y +Z +9=0 X 9 +Y 9 Z 9 1=0 Suprafaţa este un hiperboloid cu o pânză. Centrul elipsoidului înreperul R =(O, u 1, u, u 3 )esteo 0 ( 3, 1, ). Coordonatele centrului cuadricei în raportcureperulr sunt: 1 x y = = 1 6. z
112 Capitolul Completări şi exerciţii.1 Numere complexe Numerele complexe se introduc pornind de la mulţimea numerelor reale. Necesitatea introducerii lor s-a datorat faptului că unele ecuaţii algebrice (chiar dintre cele mai simple) nu au rădăcini în mulţimea numerelor reale, notată R. Exemplu clasic este ecuaţia: x +1=0. Prinnumăr complex, notat z, seînţelege o pereche ordonată denumerereale(a, b) şi se scrie z =(a, b). Pe mulţimea numerelor complexe, notată C, seintroducdouă operaţii, numite adunare şi înmulţire, după regulile: dacă z 1 =(a, b) şi z =(c, d), suma şi produsul lor sunt date de z 1 + z =(a + c, b + d), z 1 z =(ac bd, ad + bc). Se verificăproprietăţile acestor operaţii, similare cu cele din cazul numerelor reale (comutativitate, asociativitate, element neutru, etc). Operaţiile cu numere complexe se simplifică foarte mult, dacă folosim aşa numita formă algebrică a lor. Vom observa că putem scriem (a, b) =(a, 0) + (0, b) şi că (0,b)poatefi scris în forma(b, 0) (0, 1). Numărul complex (0, 1) se notează cu j (unitate imaginară ) şi se observă că j = j j =( 1, 0). Dacă facem convenţia să notăm numărul complex (x, 0) prin x, x R, atunciputem scrie mai întâi z =(a, 0) + (b, 0) (0, 1) sau mai simplu z = a + bj. Aceasta este forma algebrică anumărului complex z =(a, b). Calculele care folosesc forma algebrică sefacdupăaceleaşi reguli ca şi cum numerele ar fi reale, ţinând seama că j este egal cu ( 1, 0) şi deci se va scrie j = 1. Exemplul.1 Să secalculezecâtul numerelor complexe z 1 =(a, b) şi z = (c, d) 6= (0, 0). 113
113 114 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Rezolvare. Aceasta înseamnă săgăsim un număr z =(x, y), astfel încât z 1 = z z. Scriind (c, d) (x, y) =(a, b), găsim (cx dy, cy + dx) =(a, b), deci ½ cx dy = a dx + cy = b de unde x = ac + bd bc ad, y =. Prin urmare, câtul z este c + d c + d µ ac + bd bc ad z =,. c + d c + d Este însă multmaisimplu,să folosim forma algebrică anumerelorz 1 şi z, pentru a afla câtul lor: z = z 1 = a + bj (a + bj)(c dj) ac + bd bc ad = = + z c + dj c + d c + d c + d j. Observaţia.1 Uneori, se scrie a+jb în locdea+bj,în baza comutativităţii produsului a două numere complexe. Avem jb = bj, aici fiind vorba de egalitatea (0, 1) (b, 0) = (b, 0) (0, 1). Deexemplu,nusescriecosθ +(sinθ) j, căci este mai simplu să scriemcosθ + j sin θ. O problemă importantă în legătură cu numerele complexe este definirea exponenţialei în complex,adicădefinirea numărului complex e z, unde z = x + jy C. Dacăvremsăaveme z 1+z = e z 1 e z (ca în real), trebuie să impunem condiţia e x+jy = e x e jy, unde x şi y sunt reali. Ne punem problema cum se defineşte numărul complex e jy,cuy R. Plecând de la seria (α R) e α =1+ α 1! + α! şi înlocuind formal α cu jy, obţinem e jy =1 y! + y4 4! y6 6! + + j + + αn n! + µy y3 3! + y5 5! y7 7! + dacă ţinem seama de egalităţile j n =( 1) n şi j n+1 =( 1) n j. Sumele celor două serii din dezvoltarea lui e jy sunt cos y, respectiv sin y. Deci ar trebui să avem e jy =cosy + j sin y, y R şi prin urmare, vom defini e z prin formula e x+jy = e x (cos y + j sin y), z = x + jy C.
114 .1. NUMERE COMPLEXE 115 Se poate ajunge la această definiţie şi pe o cale absolut riguroasă şi mai mult chiar, se poate demonstra că acestaestesingurulmodîn care poate fi definită funcţia e z înplancomplex,astfelîncât să păstreze cât mai multe din proprietăţile funcţiei de variabilă reală f (x) =e x. Astfel, se verifică uşor că e z 1 e z = e z 1+z, ez 1 = ez 1 z, z 1,z C,e z 6=0, z C e z dar apare o mare deosebire faţă de funcţia f (x) =e x de variabilă reală. Anume, e z are perioada πj căci e πj =cosπ + j sin π =1. Maigeneral, avem e z+kπj = e z, z C şi k Z. În schimb, se poate demonstra că funcţia complexădevariabilăcomplexă f (z) =e z, are derivată şi f 0 (z) =e z în orice punct z C. Sevedeuşor că e z = e x, z = x + jy C şi că arg z = y +kπ, z 6= 0,z = x + jy C. Dacă f = f (t) esteofuncţiedevariabilăreală t, cu valori complexe: f (t) =f 1 (t) +jf (t), definită peunintervalalaxeireale,spunemcă f este continuă, dacă funcţiile reale f 1 (t) şi f (t) sunt continue. Spunem că f este derivabilă, dacă f 1 (t) şi f (t) sunt derivabile. Derivata sa, în raport cu variabila t, estef 0 (t) =f 0 1 (t)+jf 0 (t). Exemplul. Fie f (t) =e αt,cuα = a + bj număr complex. Avem f (t) =e at (cos bt + j sin bt) =e at cos bt + je at sin bt, f 0 (t) =ae at cos bt be at sin bt + jae at sin bt + jbe at cos bt = = ae at (cos bt + j sin bt)+bje at (cos bt + j sin bt) = =(a + bj) e (a+bj)t, adică (a αt ) 0 = αe αt, derivarea făcându-selafelcaşi în cazul când α este real. Acest fapt îşi găseşte o aplicaţie importantă la aflarea soluţiei generale a ecuaţiilor diferenţiale cu coeficienţi constanţi.
115 116 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Exemplul.3 Să considerăm ecuaţia diferenţială y 00 4y 0 +5y =0 în carey = y (x) este funcţia necunoscută. Încercând o soluţie particulară de forma y = e λx,dupăderivareşi înlocuire în ecuaţie, se ajunge la condiţia (λ 4λ +5)e λx =0,caredupăsimplificare cu e λx se reduce la λ 4λ+5 = 0. Aceasta are rădăcinile λ 1 =+j şi λ = j. Astfel,amgăsit soluţia particulară y = e (+j)x = e x (cos x + j sin x) cu valori complexe. Se arată uşor că y 1 (x) =e x cos x şi y (x) =e x sin x sunt soluţii particulare reale şi, aşa cum se ştie, soluţia generală aecuaţiei date se scrie în forma y = e x (C 1 cos x + C sin x),x (, ) unde C 1 şi C sunt constante arbitrare. Observaţia. Ţinând seama de modul în care s-a definit funcţia f (z) = e z, pare curioasă legătura care se face între funcţia exponenţială şi funcţiile trigonometrice cos x şi sin x. Dealtfel, se spune că celebra formulă e jπ = 1 arată într-o formă concisă legătura dintre aritmetică (prin numărul 1), geometrie (prin numărul π = ), algebră (prin unitatea imaginară j) şi analiza matematică (prin numărul lui Euler, e = ). Observaţia.3 Cu ajutorul exponenţialei, putem defini şi logaritmul complex al oricărui număr z 6= 0. Vom rezolva ecuaţia e w = z şi vom nota w = log z. Scriind z în forma trigonometrică z = z (cos (arg z)+sin(argz)) şi w în forma algebrică w = u + jv, din egalitatea e u (cos v + j sin v) = z (cos (arg z)+j sin (arg z)) obţinem u =log z şi v =argz, deci log z =log z + j arg z, z 6= 0. Am folosit notaţia log pentru logaritmul natural (logaritmul în bazae). De exemplu, log ( 1) = log 1 + j arg ( 1) = j (k +1)π, k Z. Din cauză că argumentul unui număr z 6= 0 are o infinitate de valori, datorată periodicităţii funcţiilor cos şi sin, putem fixa una dintre ele, de obicei cea cuprinsă în intervalul( π, π], pe care o notăm cu θ. Dacăfolosimşi notaţia z = ρ, putemscrie z = ρe jθ şi log z =logρ + j (θ +kπ), k Z.
116 .. TRANSFORMĂRI ELEMENTARE 117. Transformări elementare Se pot defini următoarele trei tipuri de transformări elementare asupra liniilor unei matrici. Definiţia.1 Numim transformări elementare asupra liniilor matricei A următoarele operaţii: (1) T 1 transformarea prin care se înmulţeşte o linie cu un scalar nenul; () T transformareaprincareseschimbă două linii între ele; (3) T 3 transformarea prin care se adună laelementeleuneiliniielementele corespunzătoare altei linii înmulţite cu un scalar. Orice matrice A M n m (R) se poate scrie cu ajutorul liniilor sub forma: A = L 1. L n, unde L i = a i1... a im,i= 1,n. Folosind scrierea matricei cu ajutorul liniilor, cele trei transformări elementare se reprezintă prin schemele: L 1 L 1 L 1 L L i L j L i T 1 αl i,α6= 0,. T.. L., j L i L n L n.. L n L n L 1 L 1.. L i L i + βl j. T 3 L.. j L j.. L n L n Vom arăta că rangul unei matrici ramâne invariant la transformările elementare aplicate liniilor unei matrice. Pentru aceasta observăm că transformările elementare asupra liniilor se realizează înmulţind la stânga matricea A cu una din matricele: -pentru transformarea T 1 prin care se înmulţeşte o linie a unei matrice cu un scalar α 6= 0seînmulţeşte la stânga matricea A cu o matrice de tip n n de forma:
117 118 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII M i (α) = i i α , det(m i (α)) = α 6= 0 care are pe diagonala principală 1cuexcepţia poziţiei (i, i) alcărei element este α 6= 0, iar elementele nediagonale toate sunt egale cu zero. -pentru transformarea T prin care se schimbă între ele două linii se înmulţeşte la stânga matricea A cu o matrice de tip n n de forma: M ij = i j i j , det(m ij )=16= 0, matrice care are pe diagoonala principală 1 cu excepţia poziţiilor (i, i) şi (j, j)caresuntegalecu0,iarelementelecarenusuntpediagonalaprincipală sunt zero cu excepţia elementelor de pe poziţiile (i, j)şi (j, i) caresuntegale cu 1. -pentru transformarea T 3 prin care se adună laliniai linia j înmulţită cu un scalar β se înmulţeşte la stânga matricea A cu o matrice de tip n n de forma: M ij (β) = i j i j β , det(m ij (β)) = 1 6= 0, matrice care are pe diagonala principală 1, iar elementele care nu sunt pe diagonala principală sunt zero cu excepţia elementului de pe poziţia (i, j)
118 .. TRANSFORMĂRI ELEMENTARE 119 care este egal cu β. Matricele introduse mai sus M i (α), M ij, M ij (β) poartă denumirea de matrice elementare. Demonstrăm că dacăînmulţim o matrice la stânga cu matricele nesingulare M i (α), M ij, M ij (β) atunci rangul matricei nu se modifică. Dacă A M n m (R) atunci ea poate fi privită ca o transformare liniară de la R m la R n. Definim nucleul lui A, ker(a) ={x R m : Ax = θ} şi imaginea matricei A, Im(A) ={y R n : x R m, y = Ax}. ker(a) şi Im(A) suntsubspaţii liniare ale spaţiilor liniare R m respectiv R n, conform Teoremei 1.9. Între dimensiunile acestor subspaţii are loc relaţia m = def(a)+ rang(a), conform Teoremei Exerciţiul.1 Dacă U este o matrice de tip n n inversabilă şi A o matrice de tip n m atunci ker(ua) =ker(a). Să sededucădeaicică rang(ua) =rang(a). Rezolvare. Pentru a demonstra egalitatea mulţimilor ker(ua) = ker(a) folosim dubla incluziune: ker(ua) ker(a) şi ker(a) ker(ua). Fie x ker(ua), rezultă UAx = θ şi deoarece matricea U este inversabilă, implică U 1 (UAx) =U 1 θ implică Ax = θ x ker(a). Reciproc, dacă x ker(a) rezultă Ax = θ, UAx = Uθ UAx = θ deci x ker(ua). De aici rezultă ker(ua) =ker(a) def(ua) =def(a). Dar n = def(a) + rang(a) şi n = def(ua) + rang(ua). Rezultă rang(ua) = rang(a). O aplicaţie practică a transformărilor elementare asupra liniilor unei matrice este calculul rangului matricei. Exerciţiul. Să se calculeze rangul matricei A = Rezolvare. S-au aplicat matricele M 1 ( 3) şi M 51 ( 5) şi s-a obţinut coloana întâia a matricei unitate:
119 10 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII M 51 ( 5)M 1 ( 3)A = = S-au aplicat matricele M ( 1), M 1 ( 1), M 3 ( 1) şi M 4 ( 1) şi s-a obţinut coloana a doua a matricei unitate: M 4 ( 1)M 3 ( 1)M 1 ( 1)M ( 1)A = = Numărul de unu care se pot obţine pe diagonala principală, schimbând eventual coloanele între ele, reprezintă rangul matricei. Rezultă că rangul matricei A este. Oaltăaplicaţie practică a transformărilor elementare asupra liniilor unei matrice este un procedeu numeric simplu de calculare a inversei unei matrici. Reamintim că inversa unei matrici nesingulare A de tip n n este dată de relaţia AA 1 = A 1 A = I, (.1) unde I este matricea unitate. Dacă am aplicat matricei A un număr finit de transformări elementare succesive E 1 E...E k şi rezultatul acestor operaţii este matricea unitate, putem scrie E 1 E...E k A = I. (.)
120 .. TRANSFORMĂRI ELEMENTARE 11 Ocomparaţie a relaţiilor (.1) şi (.) conduce la relaţia A 1 = E 1 E...E k. µ a11 a Exerciţiul.3 Fie matricea de ordin doi nesingulară A = 1 cu a 1 a = a 11 a a 1 a 1 6=0. Presupunem că a 11 6=0. Să seprezinteetapelede calcul al inversei matricei A utilizând transformările elementare. Rezolvare. Scriem matricea identitate alături de matricea A µ a11 a A= 1 a 1 a şi executăm următorii paşi pentru a determina inversa matricei: 1. Se inmulţeşte matricea A cu matricea M 1 ( 1 a 11 )pentruaobţine 1 în loc de a 11. µ 1 µ M 1 ( 1 a 11 )A = a 11 0 a11 a a 1 a 1 0 µ 1 a 1 1 = a 11 a a 1 a Se inmulţeşte prima linie cu a 1 şi se scade din linia a doua. µ µ a 1 1 M 1 ( a 1 )A = a 11 a 11 0 a 1 1 a 1 a = 0 1 µ 1 a 1 1 µ a = 11 0 a 1 a a 1 1 a 11 a 1 a 1 1 a = 11 a 11 0 a 11 a a 11 a. 1 a Se împarte linia a doua prin a 11 µ µ a 1 1 M ( 1 a 11 )A = 0 a a 11 a a 11 a = 1 a 11 1 µ 1 a 1 1 = a 11 a a 1 1 a Liniaadouaseînmulţeşte cu 1 a 11 a 1 şi se adună la linia întâia: µ 1 a 1 µ M 1 ( a 1 )A = a 11 1 a 1 1 a 11 a a 1 a a 1 a 11 = µ = 0 1 a 1 a 1 1 a 1 1 a. 11 µ 1 Rezultă că A 1 = a 1 a 1 1 a. 1 1 a 11
121 1 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Exerciţiul.4 Folosind metoda transformărilor elementare să sedeter- mine inversa matricei A = Rezolvare. Vom forma matricea A I. Cu ajutorul transformărilor elementare efectuate asupra liniilor matricii A I vom aduce matricea la forma I B.VomaveaA 1 = B L 3L 1 L L L 1 L L 1 +L L 1 L L L L L 3 L L L 3 L L 3 L Deci A 1 = Exerciţiul.5 Să se calculeze valoarea determinantului D= folosind regula lui Laplace si dezvoltându-l după primeledouă linii. Rezolvare. D = ( 1) ( 1) ( 1) ( 1) ( 1) ( 1) = 5.
122 .. TRANSFORMĂRI ELEMENTARE 13 Exerciţiul.6 Folosind metoda transformărilor elementare să serezolve sistemele: a) 3x y + z +5t = x y z 3t =4 x +5y + z t =8 x + y +z +11t = 0 ; b) x y +z +3t =5 x 3y 4z +6t = 3x +4y + z 6t =5 x +y +3z 8t = 10 Rezolvare. a) Cu ajutorul transformărilor elementare vom aduce matricea extinsă launsistemechivalentîn care necunoscutele principale vor corespunde coloanelor matricii unitate care au putut fi formate. Efectuăm succesiunea de transformări elementare: L 1 L L L L 3 L L 3L 1 L L 3 +L 1 L 3 L 4 +L 1 L 4 L 1 L L L 3 5L L 3 L 4 +L L 4 L 1 3L 3 L 1 L +L 3 L Prin urmare, sistemul este echivalent cu sistemul: x = t +6,y=t +6, z = 6t 10, t R. b) Aplicăm transformărileelementareasupramatriceiextinseasistemu- lui: L L 1 L L 3 +3L 1 L 3 L 4 L 1 L L 1 +L L 1 L 3 +L L 3 L 4 4L L 4
123 14 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII L 1 +14L 3 L L L 3 L L 3 L L 4 33L 3 L Prin urmare, sistemul este echivalent cu sistemul: x 5t =0,y 8t =0, 3 5 z 1 t =0, 0 = 1 care este incompatibil. 3 Exerciţiul.7 Săsegăseascăobazăîn subspaţiul lui R 4, subspaţiu definit de soluţiile sistemului liniar omogen Rezolvare. Rezolvăm sistemul: L 3 +L L 3 L 4 L L x 3y z +t =0 x 4y +3z +4t =0 x y 9z t =0 3x 10y + z +8t =0 L L 1 L L 3 L 1 L 3 L 4 3L 1 L ½ x 3y z +t =0 Obţinem sistemul echivalent,carearesoluţia: y +4z +t =0 x =13α +4β, y =4α +β, z = α R, t = β R. Prin urmare, subspaţiul definit de soluţiile sistemului este: S = x R 4 x = 13α +4β 4α +β α β,α,β R ª. Observăm că orice vector din S este de forma: x = α β αv 1 +βv,α,β R. Vectorii v 1 şi v genereazăsubspaţiul S şi, deoarece sunt liniar independenţi, formează obază a subspaţiului S. Exerciţiul.8 În spaţiul R4 se dau sistemele de vectori
124 .. TRANSFORMĂRI ELEMENTARE 15 S 1 = {e 0 1 = 1 1, e 0 = 0 1 3, e 0 3 = , e 0 4 = }, S = {e 00 1 = 1 1 0, e 00 = 5 6 1, e 00 3 = } Să se expliciteze subspaţiile [S 1 ] [S ]şi [S 1 ]+[S ], unde am notat cu [S] mulţimea combinaţiilor liniare ale vectorilor sistemului S. Rezolvare. Determinăm câte o bază în cele două subspaţii: S1 0 în [S 1 ], respectiv, S 0 în [S ] rang =, 1 0 6= 0 S0 1 = {e 0 1, e 0 }, rang =, 1 5 6= 0 S0 = {e 00 1, e 00 } Fie x [S 1 ] [S ]. Atunci x [S 0 1]şi x [S 0 ]. Avem ½ x [S 0 1 ] x [S 0 ] ½ x = α1 e α e 0 x = β 1 e β e 00 α 1 e α e 0 = β 1 e βe 00. Obţinem sistemul α 1 +α β 1 β =0 α 1 β 1 5β =0 α 1 α β 1 6β =0 α 1 +3α + β =0 α 1 = λ α = λ β 1 = λ β = λ, λ R. Deci, x = λe λe 0 = λ ( e e 0 )=λ , sau x = λe 00 1 λe 00 = λ (e 00 1 e 00 ) =λ Astfel [S 1 ] [S ]= x R 4 x = λ ,λ R ª.
125 16 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Fie x [S 1 ]+[S ]. Rezultă că x = x 0 + x 00 cu x 0 [S1]şi 0 x 00 [S], 0 adică x [S1 0 S]. 0 Subspaţiul [S 1 ]+[S ] este generat de [S 1 0 S]. 0 1 Să determinăm o bază în [S1 0 S]. 0 rang = 3, = 0.Deci [S 1]+[S ] este generat de e 0 1, e 0 şi e 00 1: [S 1 ]+[S ]= x R 4, x = αe βe 0 + γe 00 1, α,β,γ R ª. Exerciţiul.9 Se consideră sistemul de vectori: S = e 1 = 1 3 1, e = ª. Să se completeze S până laobazăîn R 4. Rezolvare. În R 4 orice patru vectori liniar independenţi formeazăbază. Vom completa sistemul de vectori S cu doi vectori: e 3 = a 1 a a 3 a 4 şi e 4 = b 1 b b 3 b 4 astfel încât sistemul {e1, e, e 3, e 4 } să fie liniar independent. Din α 1 e 1 + α e + α 3 e 3 + α 4 e 4 = θ rezultă sistemul α 1 α + a 1 α 3 + b 1 α 4 =0 3α 1 + α + a α 3 + b α 4 =0 α 1 + a 3 α 3 + b 3 α 4 =0 α 1 +3α + a 4 α 3 + b 4 α 4 =0 Vectorii e 1, e, e 3, e 4 vor fi liniar independenţi dacă sistemul va admite osingurăsoluţie, soluţia banală. Deci determinantul sistemului trebuie să fie diferit de zero: 1 a 1 b 1 = 3 1 a b 1 0 a 3 b 3 6= 0. 3 a 4 b 4 Deoarece =76= 0,putemluaa 1 = a = b 1 = b =0şi astfel = b 3 a3 a 4 b 4. Condiţia 6= 0 este echivalentă cu a 3 b 3 a 4 b 4 6= 0. Fie a 3 = a 4 = b 3 = b 4 =1. Obţinem.
126 .3. MATRICE BLOC 17 = =7 ( ) = 14 6= 0. Deci e 3 = , e 4 = Matrice bloc Definiţia. O matrice bloc M este o matrice construită cuajutorul altor matrice de ordin mai mic. Aceste matrice mai mici se numesc blocuri sau submatrice ale lui M. De exemplu dacă considerăm matricele A M m n (R) B M m p (R), C M q n µ (R) şi D M q p (R) atunci matricea A B M = C D este o matrice bloc, M M (m+q) (n+p) (R). Exerciţiul.10 Dacă două matrice au aceeaşi configuraţie şi matricele diagonale sunt matrice pătratice atunci cele două matrice se pot înmulţi după oregulă similară cureguladeînmulţire a matricelor. Astfel dacă considerăm matricele A 1, A M n n (R), B 1, B M n m (R), C 1, C M m n (R) şi D 1, D M m m (R) atunci µ µ µ A1 B 1 A B A1 A = + B 1 C A 1 B + B 1 D. C 1 D 1 C D C 1 A +D 1 C C 1 B +D 1 D Definiţia.3 Dacă A 1, A,..., A p sunt matrice pătratice (pot fi de dimensiuni diferite), numim sumă directăamatricelora 1 A,..., A p matricea A diag 0 A 0 0 A 1 A,..., A p = A p unde blocurile din afara diagonalei sunt zero. Exerciţiul µ.11 Să se determine inversa matricei bloc Q de forma: A 0 Q = 0 B ştiind că matricelea şi B sunt pătratice (pot fi de dimensiuni diferite) inversabile.
127 18 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Rezolvare. µ Se verifică imediatcă matricea A Q = 0 B 1 verifică relaţiile Q 1 Q = QQ 1 = I. µ A B Exerciţiul.1 Să searatecă inversa matricei bloc P = µ C D A P 1 = 1 (I + BFCA 1 ) A 1 BF FCA 1 F unde F = D CA 1 B 1. este Rezolvare. Înmulţim la stânga matricea P cu o matrice astfel încât matricea µ obţinută să µ aibă zero sub diagonala µ pricipală: I 0 A B A B CA 1 = I C D 0 CA 1. B + D Matricea obţinută oînmulţim la dreapta cu o matrice astfel aleasă încât desupra µ digonalei principale µ să µ obţinem zero: I 0 A B I A 1 B CA 1 = µ I C D µ 0 I µ A B I A 1 B A 0 = 0 CA 1 = B + D 0 I 0 CA 1. B + D µ Plecăm de la µ relaţia µ µ I 0 A B I A 1 B A 0 CA 1 = I C D 0 I 0 CA 1 B + D inversăm ambii membrii µ I A 1 1 µ 1 µ 1 B A B I 0 0 I C D CA 1 = I µ 1 A 0 = 0 CA 1. (.3) B + D µ Dar, conform exerciţiului.11: 1 µ A 0 A CA 1 = B + D 0 CA 1 B + D 1. Notăm cu F = CA 1 B + D 1. Înmulţind la stînga şi la dreapta relaţia µ (.3) cu matricele µ I A 1 B I 0 şi respectiv 0 I CA 1, obţinem: I µ 1 µ µ µ A B I A 1 B A 1 0 I 0 = C D 0 I 0 F CA 1, I
128 .3. MATRICE BLOC 19 µ A B C D µ A B C D 1 µ µ A 1 A 1 BF I 0 = 0 F CA 1 I 1 µ A = 1 (I + BFCA 1 ) A 1 BF FCA 1 F,. Exerciţiul µ.13 Să se determine determinantul matricei bloc Q de forma: A B Q =. 0 C Rezolvare. Aplicând regula lui Laplace generalizată rezultă că det(q) =det(a)det(c). Exerciţiul.14 Să se calculeze determinantul matricei bloc P, dacă A şi D sunt matrici µ pătratice şi măcar una dintre ele este nesingulară. A B P =. C D Rezolvare. Dacă matricea A este inversabilă atunciînmulţim la dreapta matricea P cu o matrice astfel încât matricea obţinutăsăaibăzerodeasupra diagonalei µ principale: µ µ A B I A 1 B A 0 = C D 0 I C D CA 1 B şi calculând determinantul ambilor membrii obţinem det(p) =det(a)det(d CA 1 B). Dacă AC = CA obţinem că det(p) =det(ad CB). Dacă matricea D este inversabilă atunciînmulţim la stânga matricea P cu o matrice astfel încât matricea obţinută săaibă zero sub diagonala principală: µ µ µ A B I 0 A BD 1 C B C D D 1 = C I 0 D şi calculând determinantul ambilor membrii obţinem det(p) =det(d)det(a BD 1 C). Dacă CD = DC obţinem că det(p) =det(ad CB). Teorema.1 Dacă A este o matrice de ordin n n, B este o matrice de ordin m µ n şi A 0 C = 0 B suma directă amatricelora şi B atunci matricea C este diagonalizabilă dacă şi numai dacă A şi B sunt diagonalizabile.
129 130 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Demonstraţie. Necesitatea. Presupunem că matricea C este diagonalizabilă, rezultă căexistă o matrice H nesingulară deordinn + m astfel încât H 1 CH =diag[λ 1,λ,...,λ n+m ]. Dacă scriem matricea H cu ajutorul coloanelor, H =col[h 1, H,..., H n+m ] unde H i = T s 1i s ni q n+1,i q n+m,i atunci CHi = λ i H i. Dacă notăm S i = T s 1i s ni, Qi = T q n+1,i q n+m,i a- tunci AS i = λ i S i şi BQ i = λ i Q i. Dacă amaveamaipuţin de n vectori liniar independenţi în mulţimea de vectori S 1,..., S n+m atunci rangul matricei col [S 1, S,..., S n+m ]arfi mai mic decât n. La fel şi pentru µ matricea col [Q 1, Q,..., Q n+m ]. În oricare S1 S din cazuri matricea H = S n+m ar avea rangul mai mic Q 1 Q Q n+m decât n + m, fals deoarece matricea H este inversabilă. Deci există exactn vectori proprii liniar independenţi în mulţimea S 1,..., S n+m şi cum aceştia sunt vectori proprii pentru A, rezultă că A este diagonalizabilă. Analog se arată cămatriceab este diagonalizabilă. Reciproc. Presupunem că A şi B sunt diagonalizabile, deci există două matrici P 1, de ordin n, şi P, de ordin m, nesingulare astfel încât matricele P 1 1 AP 1 şi P 1 BP sunt matrici diagonale, deci matricea P 1 CP este diagonală unde matricea P este µ P1 0 P = 0 P nesingulară (detp =(detp 1 )(det P ) 6= 0)..4 Transformări liniare Exerciţiul.15 Se dau transormările liniare: f : R 3 R 4, f (x) =(x 1 + x, x 1 x + x 3, x 1 +x 3, 3x 3 ), g : R 4 R 3, g(y)=(y 1 + y y 3 y 4, y 3y 4,y 1 y 3 +y 4 ). Să se calculeze nucleele şi imaginile aplicaţiilor f şi g. Să se calculeze aplicaţiile compuse f g şi g f. Să se verifice că matricea aplicaţiei compuse este egală cu produsul matricelor celor două aplicaţii. Rezolvare. Deoarece ker f = {x R 3,f(x) =θ}, obţinem sistemul
130 .4. TRANSFORMĂRI LINIARE 131 Deci ker f = {θ}. sistemul x 1 + x =0 x 1 x + x 3 =0 x 1 +x 3 =0 3x 3 =0 x 1 =0 x =0 x 3 =0 Din Imf = {y R 4, x R 3,f(x) =y}, rezultă x 1 + x = y 1 x 1 x + x 3 = y. x 1 +x 3 = y 3 3x 3 = y 4 Cum rangul matricei sistemului este 3, rezultă că sistemul este compatibil dacă y y 1 0 y 3 =0 3y 1 +3y +9y 3 7y 4 = y 4 Deci Im f = y = y 1 y y 3 y 4 R 4, 3y 1 +3y +9y 3 7y 4 =0 ª. Analog, obţinem ker g = x R 4, x = α 0 α 0,α R ª şi Im g = R 3.Avem rang f =3, def f =0, rang g =3, def g =1. Să calculăm acum aplicaţiile compuse. (f g)(y) = =(y 1 +3y y 3 4y 4 3y 1 3y 3 +3y 4 y 1 y y 3 +5y 4 3y 1 3y 3 +6y 4 ) Analog, (g f)(x) = =(4x 1 4x 3 4x 1 x 7x 3 x 1 + x +4x 3 ) În perechea de baze canonice din cele două spaţii aplicaţiile vor avea matricele: (f) B1,B =, (g) B,B 1 =, (f g) B = , (g f) B 1 =
131 13 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Observăm că (f g) B = (f) B1,B (g) B,B 1 şi (g f) B1 = (g) B,B 1 (f) B1,B. Exerciţiul.16 În R 3 se dau bazele B 1 = u 1 = 1, u = 0 1, u 3 = 1 1 ª, B = v 1 = 1 1 0, v = 1 1 1, v 3 = 0 1 ª. Să se determine aplicaţia liniară f care duce vectorii bazei B 1 în vectorii bazei B.Săsedetermine matricea aplicaţiei în fiecare din bazele: standard, B 1, B. Săsedeterminef (x), unde x =(,, ), coordonatele fiind date în baza standard din R 3. Rezolvare. Fie B = {e 1, e, e 3 } baza standard a spaţiului. Avem f (u 1 )=v 1 f (e 1 )+f (e ) f (e 3 )=e 1 + e, f (u )=v f (e ) f (e 3 )= e 1 + e e 3, f (u 1 )=v 3 f (e 1 ) f (e )+f (e 3 )=e 1 e 3. Obţinem astfel un sistem în care necunoscutele sunt f (e 1 ), f (e )şi f (e 3 ). Soluţia sistemului este f (e 1 )=e 1 + e e 3, f (e )= e 1 + e e 3, f (e 3 )= e 1 + e 3e 3. Scriind ultimele trei relaţii sub formă matriceală f (e 1 ) 1 1 e 1 f (e ) = 1 1 e f (e 3 ) e 3 obţinem matricea aplicaţiei f în baza canonică (f) B = Matricele de trecere de la baza canonică labazeleb 1, respectiv B,sunt C 1 = 1 0 1, C = Astfel matricele lui f în bazele B 1, respectiv B,sunt.,
132 .4. TRANSFORMĂRI LINIARE 133 (f) B1 = C 1 1 (f) B C 1 = 1 (f) B = C 1 (f) B C = (f) B C 1 = , 3 3 (f) B C = Observăm că aplicaţia lliniară f are aceeaşi matrice în bazeleb 1 şi B. Să calculăm f (x) folosind matricea lui f în baza canonică = Deci, f (x) = e 1 +6e 14e 3 =(, 6, 14). Să calculăm f (x) folosind matricea lui f în bazab 1. Pentru aceasta vom calcula coordonatele lui x în bazab 1. Descompunând x după vectoriibazeib 1,obţinem α 1 + α 3 = α 1 +α α 3 = α 1 α + α 3 = α 1 = 3 α =9 α 3 =5 Deci, x = 3 u 1 +9u +5u 3 = 3u 1 +9u +5u = 1 4 = Aşadar, f (x) =11u 1 1u 13u 3. Pentru verificare, înlocuim fiecare din vectorii u i cu descompunerile lor după baza canonică şi obţinem f (x) =11(e 1 +e e 3 ) 1 (e e 3 ) 13 (e 1 e + e 3 )= = e 1 +6e 14e 3 =(, 6, 14). Exerciţiul.17 Fie matricea A= Să se studieze dacă matricea este diagonalizabilă şi în caz afirmativ să se determine o matrice diagonală şi o matrice modală...
133 134 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Rezolvare. Pentru determinarea valorilor proprii calculăm polinomul caracteristic: P (λ) =λ 3 δ 1 λ + δ λ δ 3,δ 1 = 3+4+=3, δ = =3,δ 3 =deta = 1 rezultă P (λ) = (λ 1) 3 λ 1 = λ = λ 3 =1,n 1 =3. Matricea admite o singură valoare proprie λ = 1 cu multiplicitatea algebrică 3. Pentru determinarea vectorilor proprii rezolvăm sistemul T (I A)x = θ x 1 = 3x 3,x = x 3 x = x Rezultă că nu este posibil să determinăm 3 vectori proprii liniar independenţi corespunzător valorii proprii 1, deci matricea nu este diagonalizabilă. Exerciţiul.18 Fie matricea A = Să se studieze dacă matricea este diagonalizabilă şi în caz afirmativ să se determine o matrice diagonală şi o matrice modală. Rezolvare. Pentru determinarea valorilor proprii calculăm polinomul caracteristic: P (λ) =λ 4 8λ 3 +13λ 6λ = λ(λ 6)(λ 1). Valorile proprii şi multiplicităţile lor sunt λ 1 =0,n 1 =1;λ =6,n =1;λ 3 = λ 4 =1,n 3 =. Pentru λ 1 =0, rezolvăm sistemul Ax = θ x 1 + x 4 =0,x =0, T x 3 x 4 =0 x = x ,x4 R. Pentru λ =6, Ax =6x x 1 1x 5 4 =0,x =0,x 3 + x 5 4 =0 x = x T,x4 R. 5 5 Pentru λ 3 = λ 4 =1, Ax = x x 1 x 3 =0,x 4 =0 T T x = x x ,x,x 3 R. Deoarece am determinat 4 vectori proprii liniar independenţi rezultă că matricea este diagonalizabilă, o matrice diagonală şi una modală sunt, respectiv J = , H = Exerciţiul.19 Fie matricea
134 .4. TRANSFORMĂRI LINIARE 135 A = Să sedetermineoformă canonică Jordanşi o bază Jordan. Rezolvare. Calculăm polinomul caracteristic: δ 1 =0,δ =, δ 3 =0, δ 4 =1;P (λ) =(λ 1) (λ +1). Valorile proprii şi multiplicităţile lor sunt λ 1 =1,n 1 =;λ = 1,n =. Calculăm pentru λ 1 =1,d 1 =4 rang(i 4 A), dar rang(i 4 A)= 3 d 1 = 1. Deci pentru λ 1 = 1 avem osingură serie de vectori proprii şi asociaţi, serie de lungime m 1 =. Pentru a determina capul de serie căutăm soluţiile sistemului (I 4 A) x=θ, L L 1 L L 1 L L 3 3L 1 L L L L 1 +L L 1 L 3 3L 3 L 3 L 4 L L 4 Rezultă u = 3α β α β α β T T = α β T (1), de unde u 1 = T, u (1) = T. Calculăm z (1) 1 =(I 4 A)u (1) 1 = T, z (1) =(I 4 A)u (1) = T n o. Observăm că z (1) 1, z (1) sunt liniar dependenţi, de aceea vom considera unul din cei doi vectori drept cap de serie. Capul de serie va fi, deexemplu, v (1) 1 = T (1), iar vectorul propriu asociat va fi v = u (1) sau u (1) 1. Considerăm, de exemplu, v (1) = u (1) (baza Jordan nu este unică) Concluzie: npentru valoarea o proprie 1 avem o serie de un vector propriu şi un asociat, v (1) 1, v (1) şi ei îi corespunde o celulă Jordandeordin.
135 136 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Calculăm pentru λ = 1,d =4 rang(a + I 4 ). Dar rang(a)= 3, rezultă că pentru λ avem osingură serie de vectori proprii şi asociaţi, serie de lungime. Pentru a determina capul de serie determinăm soluţiile sistemului (A + I 4 ) x = θ. Rezultă u = 3α +β α β α β T = α T +β T, de unde u () 1 = T (), u = T. Calculăm z () 1 =(A + I 4 )u () 1 = T ; z () =(A + I 4 )u () = T n o. Observăm că z () 1, z () sunt liniar dependenţi (identici), de aceea vom considera unul din cei doi vectori. Capul de serie va fi v () 1 = T, iar vectorul propriu asociat va fi, deexemplu, v () = u () 1. Concluzie: npentru valoarea o proprie 1 avem o serie de un vector propriu şi un asociat, v () 1, v () şi ei îi corespunde o celulă Jordandeordin. Matricea Jordan, respectiv matricea modală, vor fi J = , H = Exerciţiul.0 Fie matricea A = Să se determine forma canonică Jordan şi o bază Jordan. Rezolvare. Calculăm polinomul caracteristic: δ 1 =9,δ =7,δ 3 = 7; P (λ) =(λ 3) 3,λ 1 =3,n 1 =3. Calculăm pentru λ 1 =3,d 1 =3 rang(3i 3 A) =. Rezultă căpentruλ 1 =3avemdouă serii de vectori proprii şi asociaţi. Deoarece ordinul de multiplicitate a rădăcinii λ 1 =3este 3, şi având două serii, singura posibilitate este de a avea o serie de lungime 1şi una de lungime. Calculăm capii de serie: calculăm capul de serie pentru seria de lungime. Determinăm o bază în ker(3i A). Deoarece (3I A) = 0 rezultă că vom avea ker(3i A) = R 3, deci o bazăîn nucleu este baza canonică. Aceasta este u 1 1 =( ) T, u 1 =( ) T, u 1 3 =( ) T.
136 .5. SPAŢII EUCLIDIENE 137 Calculăm z 1 1 =(3I A)u 1 1 =( ) T ; z 1 =(3I A)u 1 = ( 6 ) T ; z 1 3 =(3I A)u 1 3 =( ) T. Observăm că {z 1 1, z 1, z 1 3} sunt liniar dependenţi, de aceea vom considera unul din cei trei vectori. Capul de serie va fi v1 1 =( ) T, iar vectorul propriu asociat va fi: v 1 = z 1 1 sau z 1 sau z 1 3. Considerăm, de exemplu, v 1 = z 1 1(baza Jordan nu este unică). Pentruseriadelungime1,calculăm vectorii proprii rezolvând sistemul (3I A)w = θ. Vom obţine: w 1 =( ) T şi w =( 1 0 ) T. Concluzie: pentru valoarea proprie 3 avem o serie de un vector propriu şi un asociat, {v1, 1 v} 1 şi ei îi corespunde o celulă Jordandeordinşi o serie formată numai dintr-un vector propriu. Pe acesta îl alegem dintre vectorii w 1 sau w astfel încât cei trei vectori să fie liniar independenţi. Fie astfel vectorul v1 =( ) T. Acestora le corespunde o celulă Jordandeordin doi şi una de ordin întâi. Matricea Jordan, respectiv matricea modală, sunt: J = , H = Spaţii euclidiene. Exerciţiul.1 Fie A =(a ij ) o matrice reală, de ordinul n. Să se arate că hax, yi = x, A T y, x, y R n. Rezolvare. Scriind x =(x 1,x,...,x n ) T şi y =(y 1,y,...,y n ) T,avemde verificat egalitatea nx nx nx nx a ij x j y i = a ji x i y j i=1 j=1 j=1 i=1 care este evidentă. Fie X un subspaţiu din spaţiul euclidian E n. Definiţia.4 SubmulţimeadevectoriY, definită prinrelaţia Y = {y; y E n, hy, xi =0, x X}. se numeşte complementul ortogonal al subspaţiului X şi se notează cu simbolul X. Se constată imediatcă Y este un subspaţiu din E n. Dacă X = E n, subspaţiul Y constă numai din vectorul nul θ, deci acest caz nu este interesant.
137 138 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Exerciţiul. Să se arate că dacă Y = X,atunciY = X. Cu alte cuvinte, cele două subspaţii X şi Y sunt fiecare complementul ortogonal al celuilalt. Rezolvare. Fie X un susbpaţiu din E n,cudimx = m<n.evidentcăîn X există obază ortonormată e (1), e (),...,e (m)ª,carepoatefi completată până laobază ortonormată dine n,prinadăugarea altor vectori e (m+1), e (m+),..., e (n). Fiecare din aceşti ultimi n m vectori face parte din Y = X,căci ei fiind ortogonali pe e (1), e (),..., e (m) sunt ortogonali pe orice vector din X. Este evident şi că orice vector de forma c m+1 e (m+1) + c n e (n) face de asemenea parte din Y. Fieacumy un vector oarecare din Y. Eleste de forma y = c 1 e (1) +c e () + +c m e (m) +c m+1 e (m+1) + +c n e (n), ca oricare vector din E n.ţinând seama că baza e (i),i= 1,n ª este ortonormată, din condiţiile y, e (i) =0pentrui = 1,m obţinem c i = 0 pentru i = 1,m. În concluzie, Y coincide cu totalitatea vectorilor de forma y = c m+1 e (m+1) + c m+ e (m+) + + c n e (n),c i R, i = m +1,n adică este subspaţiul generat de vectorii e (i), i = m +1,n.Schimbând rolul subspaţiilor X şi Y, deducem că Y = X. De aici rezultă că: Exerciţiul.3 Dacă E n este un spaţiu spaţiul euclidian şi X un subspaţiu al lui E n, atunci E n = X X. Oaplicaţie importantă a exerciţiului. va fi obţinutăîn cazul spaţiilor R n, referitoare la compatibilitatea sistemului liniar Ax = b. Unii autori numesc teorema care urmează teorema fundamentală aalgebrei liniare. Teorema. Condiţia necesară şi suficientă casistemulax = b să fie compatibil este ca vectorul liber b să fie ortogonal pe toate soluţiile sistemului liniar omogen A y = θ. Demonstraţie. Necesitatea. Presupunem că sistemul este compatibil şi fie y osoluţie oarecare A T y = θ. Deoareceexistă x R n astfel încât Ax = b, vom avea hb, yi = hax, yi = x, A T y = hx, θi =0 adică b este ortogonal pe toate soluţiile sistemului A T y = θ. Suficienţa. Presupunem că b este ortogonal pe toate soluţiile sistemului A T y = θ. Mulţimea vectorilor de forma Ax, cux R n formează un subspaţiu liniar în R n,pecareîl notăm X. Acest subspaţiu constă din totalitatea combinaţiilor liniare de vectori-coloană dina, deoarece dacă notăm vectorii coloană cuv (i), i = 1,n vectorul Ax poate fi scris în forma
138 .5. SPAŢII EUCLIDIENE 139 Ax = x 1 v (1) + x v () + + x n v (n). Condiţiacaunvectory R n să fie ortogonal pe toate elementele din X este echivalentă cucondiţia ca y să fie ortogonalpetoatecoloanelelui A. Aceastăultimă condiţie seexprimă prin aceea că y satisface sistemul A T y = θ (aceasta este condiţia de ortogonalitate pe liniile lui A T,adicăpe coloanele lui A). Prin urmare, complementul ortogonal al lui X, pecareîl notăm Y, este Y = X = y; y R n, A T y = θ ª. Dar atunci, avem şi Y = X (conform exerciţiului.). Aceasta înseamnăcăorice vector b care este ortogonal pe Y, aparţine subspaţiului X şi deci există x R n,astfelîncât Ax = b. Deci sistemul este compatibil. Teorema precedentă este interesantă numai în cazul det A = 0. Dacă det A 6= 0,sistemulAx = b este compatibil pentru toţi b R n. În acest caz, X = R n şi Y constă numai din vectorul nul. Subspaţiul X se notează cu Im (A) imaginealuia, iary se notează ker A T nucleul lui A T. Cu noile notaţii, putem scrie (Im (A)) =ker A ³ T şi ker (A) T =Im(A). Relativ la compatibilitatea sistemelor liniare, are loc şi următoarea teoremă: Teorema.3 Fie A =(a ij ), i = 1,m, j = 1,n o matrice reală, b R m şi x R n.dintresistemeleliniare Ax = b şi (.4) A T u = θ, b T u = c (c 6= 0) (.5) unul şi numai unul este compatibil. Demonstraţie. În sistemul (.4), necunoscuta este x R n,iarîn (.5) necunoscuta este u R m, θ fiind vectorul nul din R n. Cazul: sistemul (.4) este incompatibil. După teorema lui Kronecker - Capelli, rezultă r (A) <r(ã) unde à este matricea (A b), obţinută dina prin adăugarea coloanei b. Dacă r (A) =r (r min {m, n}), rezultă că r(ã) =r + 1. Sistemul (.5) se scrie pe larg, astfel a 11 u 1 + a 1 u + + a m1 u m =0... a 1n u 1 + a n u + + a mn u m =0 b 1 u 1 + b u + + b m u m = c. (.6)
139 140 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII µ A T Matricea coeficienţilor acestui sistem o putem scrie în forma b T T şi ea are rangul r + 1, fiind transpusa matricei à =(Ab). Matricea obţinută prin adăugarea coloanei termenilor liberi (matricea extinsă) o scriem în forma µ A T θ b T, θ vectorul nul în R c n. (.7) Evident, ultima ecuaţie în (.6) nu este o consecinţă aprimelorn linii, deci matricea (.7) are rangul mai mare decât r, adică are rangul r +1. Deci sistemul (.5) este compatibil. Cazul: sistemul (.4) este compatibil. Fie x osoluţie a sa, adică Ax = b. Presupunem căşi (.5) este compatibil şi fie u osoluţie a sa, adică A T u = θ, b T u = c (c 6= 0). Vomavea b T u =(Ax) T u = x T A T u = x T θ =0 (.8) care vine în contradicţie cu b T u 6= 0. Contradicţia obţinută aratăcădacă (.4) este compatibil, rezultă că (.5) este incompatibil. Exerciţiul.4 Matricea reală simetrică, de ordinul n, A =(a ij )areautovalorile λ 1 λ λ n. Să searatecă λ 1 kxk x T Ax λ n kxk, x R n unde k k reprezintă norma euclidiană a vectorilor în R n. Rezolvare. Pentru matricea A, existăobază ortonormatăîn R n,formată din vectori proprii v (i),i= 1,n ª ai săi. Aceştia satisfac condiţiile Av (i) = λ i v (i), i = 1,n, sunt ortogonali doi câte doi şi fiecare are norma egală cu unitatea. Matricea ortogonală H =col v (1), v (),...,v (n) diagonalizează matricea A, adicăavemh 1 AH =diag[λ 1,λ,...,λ n ]şi deoarece H 1 = H T,putemscrieşi H T AH =diag[λ 1,λ,...,λ n ]. Dacă facem substituţia x = Hξ, găsim kxk = x T x =(Hξ) T (Hξ) =ξ T H T H ξ = ξ T ξ = kξk şi ξ T x T Ax = ξ T H T AH ξ = λ λ ξ = λ 1ξ1 + λ ξ + + λ n ξn. 0 0 λ n
140 .5. SPAŢII EUCLIDIENE 141 Din ultimele două relaţii, găsim λ 1 kxk x T Ax λ n kxk, x R n. Mai putem scrie (min λ i ) kxk x T Ax (max λ i ) kxk, x R n unde λ i, i = 1,n sunt autovalorile matricei simetrice A. Folosind majorarea obţinută şi formula (1.108), putem obţine norma matriceală pem n n (R), generată denormaeuclidiană a vectorilor în R n. Definiţia.5 Se numeşte normă spectralăamatriceia, norma dată de formula ½ ¾ kaxk A s =sup kxk ; x 6= θ, x R n în carek k este norma euclidianăîn R n. Teorema.4 Norma spectrală a matricei reale A este dată de formula A s = max µ i, în careµ i sunt autovalorile matricei reale simetrice B = A T A. Demonstraţie. Mai întâi, vom observa că x T Bx 0, x R n. În adevăr, x T Bx = x T A T A x =(Ax) T (Ax) =kaxk 0. Apoi, ştim că printr-o schimbare de variabile x = Hξ, cu H matrice ortogonală, găsim x T Bx = µ 1 ξ 1 + µ ξ + + µ n ξ n (max µ i ) kξk =(maxµ i ) kxk pentru toţi x R n.daravemşi µ i 0 pentru i = 1,n,dacăţinem seama de condiţia x T Bx 0 pentru orice x R n. Din inegaligatea kaxk max µi kxk, x R n deducem kaxk kxk max µ i A s max µ i. Pentru a termina demonstraţia, rămâne să găsim un vector x 6= θ, pentru care kavk kvk = max µ i. Acest vector va fi vectorul propriu al lui B, care satisface Bv = µv, unde µ =maxµ i. În adevăr, avem v T Bv = kavk şi v T Bv = µv T v = µ kvk ceea ce implică kavk kvk = µ.
141 14 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Observaţia.4 De reţinut că norma euclidiană pentru vectori nu generează norma euclidiană pentru matrice. Evident, avem A s kak. Definiţia.6 Două norme oarecare 1 şi pe un spaţiu vectorial real V se numesc echivalente, dacă există două constante pozitive α β, astfel încât α x x 1 β x, x V. Exerciţiul.5 Două norme oarecare pe R n sunt echivalente. Rezolvare. Notăm 1 şi funcţiile care definesc cele două normeper n şi considerăm mulţimea S = {x; x R n şi x =1}, careestecompactă (mărginită şi închisă în R n ). Funcţia reală f (x) = x 1 este continuă pe R n.notăm α =inff (x) şi β =supf (x). Evident α β şi în plusα>0, x S x S căci f îşi atinge marginile (α şi β) şi ia numai valori pozitive pe S (conform teoremei lui Weierstrass). Luând µ x 6= θ din R n,avem x x S α f β α x x x x 1 β x, inegaliate adevărată pentru x R n (inclusiv pentru x = θ). Observaţia.5 Evident, este adevărată şi relaţia 1 β x 1 x 1 α x 1, x R n. Exerciţiul.6 Formula nx nx A = a ij, i=1 defineşte o normă matriceală pemulţimea M n n (R). Rezolvare. Este suficient să arătăm numai că AB A B pentru două matrice oarecare, de ordinul n. Vomscrie à nx nx nx nx nx nx! AB = a ik b a kj ik b kj i=1 j=1 k=1 şi vom folosi majorarea evidentă b kj j=1 i=1 P n j=1 m=1 k=1 b mj,adică am majorat fiecare b kj cu suma tuturor valorilor absolute ale elementelor din coloana j. Atunci vom obţine nx că à nx nx! nx nx a ik b kj a ik b mj = a ik b mj şi deci k=1 k=1 m=1 k=1 m=1 µ P AB n np n P np a ik b mj = i=1 j=1 k=1 m=1 µ n P np Ã! np np = a ik b mj = A B. i=1 k=1 j=1 m=1
142 .5. SPAŢII EUCLIDIENE 143 Exerciţiul.7 Fie A o matrice de ordinul n. Dacă λ este autovaloare pentru A, rezultă λ A, oricare ar fi norma matriceală aleasă. Rezolvare. Fie Ax = λx şi X = col[x, x,..., x] matricea cu toate coloanele x R n (s-a presupus x 6= θ). Avem AX = λx, căci fiecare coloană dinax coincide cu vectorul λx, lafelcaşi fiecare coloană din matricea λx. Deducem că λx = AX sau încă λ X A X. Simplificând cu X 6= 0,obţinem λ A. Exerciţiul.8 Fie A = (a ij ) o matrice de ordinul n. normă matriceală pentru care A < 1, rezultă lim k Ak = 0 = matricea nulă. Dacă existăo Rezolvare. Prin definiţie, şirul de matrice {M k } are limita L, dacăexistă onormăastfelîncât ³ M k L 0 pentru k. Dacănotăm M k = m (k) ij, k =1,, 3,... şi L =(α ij ), convergenţa este echivalentă cum (k) ij α ij pentru k, oricare ar fi perechea fixată deindici(i, j). Aceasta se întâmplă deoarece orice orice normă matriceală esteechivalentă cu oricare dintre normele cunoscute, pentru care afirmaţia se verifică imediat. În cazul de faţă, avem A k 0 = A k A k 0 când k. ³ Deci, dacă notăm A k = a (k) ij, rezultă a (k) ij 0când k, oricare ar fi perechea de indici (i, j). Exerciţiul.9 Fie A =(a ij ) o matrice de ordinul n, cu elemente reale sau complexe. Dacă nx a ii > a ij,i= 1,n j=1 j6=i să searatecă det A 6= 0. Rezolvare. Presupunem det A = 0, ceea ce înseamnă că o coloană este combinaţie liniară de celelalte coloane. Avem c 1 v (1) +c v () + +c n v (n) = θ, undev (i) sunt vectorii-coloană ai matricei A şi măcar un coeficient este 6= 0. Fie c k c i pentru i = 1,n.Avem v (k) = c 1 c k v (1) c c k v () c n c k v (n), unde în dreapta, desigur, lipseşte termenul cu v (k). În coloana k, pe linia k se află termenula kk, pentru care avem
143 144 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII a kk = c 1 a k1 c a k c n a kn c k c k c k de unde rezultă a kk c 1 c k a k1 + c c k a k + + c n c k a kn adică a kk a k1 + a k + + a kn unde, evident, în dreapta lipseşte termenul a kk. Aceasta este o contradicţie, deci det A 6= 0. ElementelematriceiA pot fi şi numere complexe. Exerciţiul.30 Fie A =(a ij ) o matrice de ordinul n, cu elemente reale P sau complexe. Notăm ρ i = n a ij, i = 1,n. Să se arate că j=1 j6=i σ (A) n[ {z; z a ii ρ i }. i=1 Rezolvare. Prin σ (A) am notat mulţimea autovalorilor matricei A (spectrul matricei A). Mulţimea D i = {z; z a ii ρ i } reprezintă un disc din planul complex, cu centrul în a ii şi de rază ρ i. Acestea se numesc discurile lui Gershgorin. Fieλ un număr complex care nu face parte din mulţimea ns D i. Aceasta înseamnă căavem λ a ii >ρ i pentru toţi i = 1,n. Dar i=1 λ a ii este elementul de pe diagonalela principală a determinantului care dă valoarea polinomului caracteristic P (λ) = det(λi A), iar condiţiile λ a ii >ρ i pentru i = 1,n spun că pe fiecare linie, elementul de pe diagonala principală estemaimareîn moduldecât suma modulelor celorlalte elemente din linia sa. Conform exerciţiului.9, P (λ) 6= 0, deci în ns afara mulţimii D i nu se află niciorădăcină a polinomului P (λ), adică i=1 S σ (A) n D i. i=1 Exerciţiul.31 Fie A o matrice de ordinul n, realăsaucomplexă. Notăm R (λ) =(λi A) 1,pentruλ diferit de autovalorile matricei A. Săse arate că R (λ) R (µ) =(µ λ) R (λ) R (µ). Rezolvare. Scriem R (λ) =R (λ)(µi A) R (µ) =R (λ)[(λi A)+(µ λ) I] R (µ) = =[I +(µ λ) R (λ)] R (µ) =R (µ)+(µ λ) R (λ) R (µ),
144 .5. SPAŢII EUCLIDIENE 145 de unde rezultă imediat identitatea cerută. Scriind R (µ) R (λ) =(λ µ) R (µ) R (λ) obţinută prinschimbarearolurilorluiλ şi µ, găsim şi relaţia R (λ) R (µ) =(µ λ) R (µ) R (λ) deci în final vom avea şi egalitatea R (λ) R (µ) =R (µ) R (λ), adică cele două matrice sunt permutabile. Exerciţiul.3 Fie A =(a ij ) o matrice reală simetrică deordinuln. Să se arate că sumapătratelor autovalorilor sale este egală cusumapătratelor elementelor sale, adică nx nx nx λ i = a ij. i=1 i=1 Rezolvare. Numerele reale λ i, i = 1,n sunt autovalorile matricei A. P Dacă notăm A = B, rezultă n P λ i =trb = n b ii (am folosit notaţiile i=1 i=1 P B =(b ij )). Dar b ii = n P a ij a ji = n np P a ij, deci λ i = n np a ij. j=1 j=1 j=1 i=1 i=1 j=1 Exerciţiul.33 Fie A =(a ij ) o matrice reală nesingulară deordinuln. Să se exprime valorile proprii şi vectorii proprii ai matricei inversei matricei A în funcţie de valorile proprii şi vectorii proprii ai matricei A. Rezolvare. Polinomul caracteristic al matricei A este P (λ) =det(λi A) =(λ λ 1 )(λ λ ) (λ λ n ), independent de faptul că autovalorile sunt sau nu sunt simple. Polinomul caracteristic al matricei A 1 este Q (λ) =det(λi A 1 )=deta 1 (λa I) = 1 det (λa I) = det A µ µ µ = ( 1)n λ n 1 det λ 1 λ λ n λ I A = ( 1)n λ n 1 1 λ 1 λ λ n λ λ 1 λ λ µ 1 λ λ n = µλ µλ 1λ1 1λ µλ 1λn, adică A 1 are autovalorile λ 1 1, λ 1,..., λ 1 n.observăm că dacă v (i) este vector propriu pentru A, corespunzător autovalorii λ i, atunci din Av (i) = λ i v (i),găsim A 1 v (i) = 1 v (i),adică v (i) este vector propriu şi pentru A 1, λ i corespunzător autovalorii 1 λ i.
145 146 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Exerciţiul.34 Matricea A are autovalorile λ i 6=0, i = 1,n. Să se arate că det A + A 1 = µλ 1 + µλ 1λ1 + 1λ µλ n + 1λn. Rezolvare. A + A 1 = A 1 (A + I), deci det (A + A 1 )=(deta 1 ) det (A + I). Vom ţine seama că A + I = f (A), unde f (λ) =λ + 1. Deci autovalorile matricei A + I sunt λ 1 +1,λ +1,..., λ n +1. În concluzie, det A + A 1 1 = λ λ 1 λ λ 1 +1 λ +1 λ n +1 = n = µλ 1 + µλ 1λ1 + 1λ µλ n + 1λn. Exerciţiul.35 Fie A o matrice de ordinul n, nesingularăşi cu autovalorile λ i, i = 1,n. Să se afle polinomul caracteristic al matricei adjuncte, adică al transpusei formate cu complemenţii algebrici ai elementelor din A. Rezolvare. Notăm matricea adjunctă cub şi avem B =(b ij ), unde b ij = (A ij ), i, j = 1,n.PutemscrieB =(deta) A 1. Polinomul caracteristic al matricei B este Q (λ) =det(λi B) =det(λi µ (det A)A 1 )= λ =(deta) n det det A I A 1 = µ µ µ λ λ λ =(deta) n µ = det A 1 λ 1 λ det A µ λ 1 det A 1 λ µ λ det A λ det A 1 λ n. λ det A λ n Exerciţiul.36 Fie A o matrice reală, de ordinul n. Să se arate echivalenţa x T Ax =0, x R n A T = A. Rezolvare. Din x T Ax =0obţinem prin transpunere că şi x T A T x =0. Aşadar, avem x T A + A T x =0, x R n ceea ce atrage că A + A T = 0, deci A T = A. Reciproc, dacă plecăm de la ipoteza că A T = A, adică A este antisimetrică, obţinem a ii = 0 pentru i = 1,n şi a ij = a ji,pentru i, j = 1,n.Daratunci, nx nx nx nx x T Ax = a ij x i x j = a ij x i x j = (a ij + a ji ) x i x j =0, x R n. i=1 j=1 i,j=1 i6=j i,j=1 i<j Echivalenţa din enunţ a fost dovedită. =
146 .5. SPAŢII EUCLIDIENE 147 Exerciţiul.37 Fie A reală, antisimetrică şi λ 6= 0 o autovaloare a sa. Să se arate că (a) λ = βj, cu β = real diferit de zero; (b) dacă x = u + jv este vector propriu corespunzător lui λ = βj, avem kuk = kvk şi hu, vi =0. Rezolvare. (a) a fost demonstrată când s-a găsit forma autovalorilor unei matrice reale antisimetrice. (b) ScriemA (u + jv) =βj (u + jv) şi găsim Au = βv, Av = βu. Din v T Av =0=βv T u,rezultă v T u = hu, vi =0. Apoi,dinv T Au = βv T v şi u T Av = βu T u,găsim prin adunare β u T u v T v =0,deunde kuk = kvk. Am folosit relaţia v T Au + u T Av =0. Exerciţiul.38 Fie A =(a ij ) o matrice reală saucomplexă, de ordinul n, P având proprietatea că n a ij < 1 pentru i = 1,n. Să se arate că matricele j=1 I + A şi I A sunt inversabile. Rezolvare. Matricea I + A areelementele1+a ii pe diagonala principală şi respectiv a ij pentru i 6= j. Pentru i =fixat,avem a ii + nx a ij < 1 i,j=1 j6=i nx a ij < 1 a ii a + a ii, i,j=1 j6=i deci elementul de pe diagonala principală are modulul mai mare decât suma modulelor celorlalte elemente de pe linia corespunzătoare. După un exerciţiul cunoscut, această condiţie implică det(i + A) 6= 0. În mod analog, găsim det (I A) 6= 0, deci şi det(i A ) 6= 0. Exerciţiul.39 Fie A o matrice reală, de ordinul n şi satisfăcând condiţia x T Ax 0, x R n. Dacă ε>0, să se arate că A + εi este inversabilă. Rezolvare. Condiţia x T Ax 0semaiscriecahAx, xi 0, x R n.fie acum (A + εi) x = θ (vectorul nul din R n ). Avem h(a + εi) x, (A + εi) xi = hax, Axi +ε hax, xi + ε hx, xi =0. Deoarece cei trei termeni sunt nenegativi şi au suma zero, rezultă că toţi sunt egali cu zero. Din hx, xi =0 x = θ, aşa încât sistemul algebric (A + εi) x = θ are numai soluţia banală x = θ (x 1 = x = = x n =0), ceea ce implică det(a + εi) 6= 0,decimatriceaA + εi este inversabilă.
147 148 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Exerciţiul.40 Matricea reală A este antisimetrică. Să se arate că (a) I + A şi I A sunt inversabile; (b) B =(I A)(I + A) 1 este ortogonală. Rezolvare. (a) Autovalorile lui A sunt de forma forma βj, cuβ = real. Autovalorile matricelor I ± A sunt de forma 1 ± βj 6= 0,deciI ± A sunt inversabile. (b) B T = (I + A) 1 (I A) T =(I A) 1 (I + A), deci B T B =(I A) 1 (I + A)(I A)(I + A) 1 = =(I A) 1 (I A)(I + A)(I + A) 1 = I, adică B este ortogonală. S-a folosit egalitatea (I + A)(I A) =(I A)(I + A), ambele produse fiind egale cu I A. Exerciţiul.41 Fie A omatricereală, de ordinul n, cuproprietăţile (a) I + A şi I A sunt inversabile; (b) B =(I A)(I + A) 1 este ortogonală. Să se arate că A este antisimetrică. Rezolvare. Fixăm un element u R n şi notăm x = (I + A) u, deci u =(I + A) 1 x.avembx =(I A)(I + A) 1 x =(I A) u = u Au. Deoarece B este ortogonală, avem hbx, Bxi = hx, xi, x R n. Deci, rezultă hu Au, u Aui = hu + Au, u + aui, sau echivalent kuk hau, ui + kauk = kuk +hau, ui + kauk. În concluzie, hau, ui = u T Au =0, u R n şi matricea A este antisimetrică (conform exerciţiului.36). Exerciţiul.4 Fie A o matrice reală, de ordinul n. Să se arate echivalenţa următoarelor afirmaţii (a) A este ortogonală; (b) hax, Ayi = hx, yi, x, y R n ; (c) hax, Axi = hx, xi, x R n. Rezolvare. Presupunem că (a) esteadevărată şi arătăm că (a) (b): hax, Ayi=(Ay) T (Ax)=y T A T A x=y T Ix =y T x=hx, yi, x, y R n. Presupunem că (b) esteadevărată şi arătăm că (b) (c): luând în (b), y = x găsim hax, Axi = hx, xi, x R n, deci această implicaţie a fost
148 .5. SPAŢII EUCLIDIENE 149 banală. Acum, presupunem că (c) este adevărată şi arătăm că (c) (a): egalitatea (c) poate fi scrisă în formaechivalentă x T A T A I x = 0, x R n, ceea ce atrage în mod evident A T A I = matricea nulă, adică A este matrice ortogonală. Echivalenţa celor trei afirmaţii a fost dovedită. Exerciţiul.43 Fie AD = DA şi D =diag[λ 1,λ,...λ n ]cuλ i 6= λ j pentru i 6= j. Să se arate că A este o matrice diagonală. Rezolvare. Fie i 6= j o pereche de indici; în AD pe locul (i, j) avem np elementul a ik d kj = a ij d jj = λ j a ij. În DA, pelocul(i, j) avemelementul k=1 np d ik a kj = d ii a ij = λ i a ij. Din (λ j λ i ) a ij =0 a ij = 0 pentru i 6= j. k=1 Deci A este o matrice diagonală. Exerciţiul.44 Fie A şi B reale simetrice, de acelaşi ordin, cel puţin una dintre ele având autovalorile diferite între ele. Să se arate echivalenţa afirmaţiilor (a) AB = BA; (b) există o matrice ortogonală C, astfelîncât C 1 AC şi C 1 BC sunt amândouă matrice diagonale. Rezolvare. Presupunem AB = BA. Ştim că există C = matrice ortogonală, astfel încât. C 1 AC =diag[λ 1,λ,...,λ n ], încareλ i sunt autovalorile lui A, presupuse diferite între ele (λ i 6= λ j dacă i 6= j). Matricele C 1 AC şi C 1 BC comutăîntre ele, căci C 1 AC C 1 BC = C 1 (AB) C=C 1 (BA) C= C 1 BC C 1 AC şi prima este o matrice diagonală, cu elemente diferite pe diagonala principală. Rezultă căşi a doua matrice este de tip diagonal (conform exerciţiului precedent). Am arătat că (a) (b). Reciproc, dacă areloc(b), matricele C 1 AC şi C 1 BC sunt permutabile, fiind amândouă de tip diagonal. Avem (C 1 AC)(C 1 BC) =(C 1 BC)(C 1 AC) sau C 1 (AB) C=C 1 (BA) C, de unde găsim AB = BA. Deci (b) (a). Cele două afirmaţii sunt echivalente. Observaţia.6 Mai interesantă este implicaţia (a) (b). Aceasta spune că este suficient să găsim o bază ortonormată formată din vectori proprii v (i) ai matricei cu autovalori distincte, pentru ca notând x = Cξ, unde am notat C =col v (1), v (), v (3) să aducem simultan la forma canonică cele două formepătratice f(x) =x T Ax şi g(x) =x T Bx, ţinând seama şi de condiţia C 1 = C T.
149 150 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Exerciţiul.45 Fie A o matrice de ordinul n, pentru care A n = 0, unde m este un număr fixat, 1 m n. Să se arate că det(i + λa) 1. Rezolvare. Autovalorile lui A m sunt λ m 1, λ m,..., λ m n,iarpedealtă parte ele sunt toate nule, deoarece matricea nulă are polinomul caracteristic egal cu det (λi 0) = det(λi) = λ n, deci toate autovalorile sale sunt nule. Rezultă λ 1 = λ = = λ n =0şi P (λ) =det(λi A) λ n. Pentru λ 6= 0,avem µ 1 det (I + λa) =detλ λ I + A =det( λ) µ 1λ I A =( λ) n P µ 1 λ = =1. Dacă λ =0,afirmaţia din enunţ estedeasemeneaadevărată. Exerciţiul.46 Fie A o matrice reală saucomplexă, cu autovalori diferite între ele şi fie C o matrice care permite diagonalizarea. Să se arate că toate soluţiile ecuaţiei B = A sunt date de formula B = C diag h± p λ 1, ± p λ, ± p i λ n C 1, în careλ i, i = 1,n sunt autovalorile lui A. Rezolvare. Scriind A = C diag λ 1, λ,..., λ n C 1,găsim căpentru orice B de forma dată, avem B = C diag λ 1, λ,..., λ n C 1 = A. Reciproc: dacă B = A, matricele A şi B comută laînmulţire şi atunci comută şi C 1 AC cu C 1 BC. Dar C 1 AC este o matrice diagonală, cu elementele de pe diagonala principală diferite între ele (λ i 6= λ j pentru i 6= j) şi atunci C 1 BC este tot o matrice diagonală: C 1 BC = diag [µ 1,µ,...,µ n ]. De aici, rezultă B = C diag [µ 1,µ,...,µ n ] C 1 şi B = C diag [µ 1,µ,...,µ n] C 1 = A, de unde µ 1 = λ 1, µ = λ,..., µ n = λ n. Prin urmare, în modobligatorb este de forma enunţată. Observaţia.7 Dacă toţi λ i 0, toate rădăcinile matricei reale A sunt reale. Dacă toţi λ i 6=0, A are n rădăcini de ordinul, toatedeforma enunţată. Exerciţiul.47 Fie A şi B două matrice reale simetrice cu autovalorile λ 1 λ λ n, respectiv µ 1 µ µ n. Notăm ρ i, i = 1,n autovalorile matricei A + B. Să searatecă λ 1 + µ 1 ρ i λ n + µ m, i = 1,n.
150 .5. SPAŢII EUCLIDIENE 151 Rezolvare. Din inegalităţile λ 1 kxk x T Ax λ n kxk şi µ 1 kxk x T Bx µ n kxk, valabile pentru orice x R n,obţinem (λ 1 + µ 1 ) kxk x T (A + B) x (λ n + µ n ) kxk, x R n. Fie v un vector propriu al matricei A + B, corespunzător autovalorii ρ, adică (A + B) v = ρv şi v 6= θ. Luăm în inegalităţile precedente x = v, găsim λ 1 + µ 1 ρ λ n + µ n pentru orice autovaloare ρ a matricei A + B. Exerciţiul.48 Fie A şi B două matrice reale simetrice, de acelaşi ordin, având autovalorile nenegative. Să se arate că det (A + B) det A +detb. Rezolvare. Păstrând notaţiile din exerciţiul precedent, avem det (A + B) =ρ 1 ρ ρ n (λ 1 + µ 1 )(λ + µ ) (λ n + µ n ) λ 1 λ λ n + µ 1 µ µ n =deta +detb. Ipoteza că autovalorile λ i şi µ i, i = 1,n sunt 0 a fost esenţială în deducerea inegalităţii enunţate care, evident că nu areloc în cazul matricelor oarecare. Exerciţiul.49 Fie A şi B două matrice reale, de ordinul n. Notăm, în ordine crescătoare cu λ i, respectiv µ i, i = 1,n autovalorile matricelor reale simetrice A T A sau B T B. Dacă ρ este o autovaloare reală a matricei AB, să se arate că λ1 µ 1 ρ λ n µ n. Rezolvare. Forma pătratică x T A T A x = kaxk 0, deci toate autovalorile λ i sunt 0. La fel, toate autovalorile µ i sunt 0. În plus, avem şi inegalităţile λ 1 kxk kaxk λ n kxk, µ 1 kxk kbxk µ n kxk, x R n. Fie v un vector propriu pentru AB, corespunzător autovalorii reale ρ, adică (AB) v = ρv, v 6= θ. Avem k(ab) vk = ka (Bv)k λ n kbvk λ n µ n kvk care implică ρ kvk λ n µ n kvk, deci ρ λ n µ n.asemănător, se găseşte şi inegalitatea λ 1 µ 1 ρ,ceeaceîncheie demonstraţia.
151 15 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Consecinţa.1 Dacă A şi B sunt două matrice reale simetrice, de ordinul n, având autovalorile λ i, respectiv µ i înplusab = BA, atunci rezultă min λ i min µ i ρ j max λ i max µ i, j = 1,n pentru toate autovalorile ρ j ale matricei AB. În adevăr, în acest caz AB este simetrică, deci are toate autovalorile ρ j reale, A T A = A, B T B = B, λ i = λ i, µ i = µ i, i = 1,n. Dar λ i şi µ i, i = 1,n nu mai sunt, în general, numerotate în ordinea crescătoare. Putem scrie şi altfel (min λ i )(min µ i ) ρ j (max λ i )(max µ i ), j = 1,n. Exerciţiul.50 Folosind teorema Cayley-Hamilton, să se calculeze A 1 şi A 4 4A 3 A +1A 7I pentru matricea A = Rezolvare. Conform teoremei Cayley-Hamilton P (A) = 0, undep (λ) este polinomul caracteristic al matricei A. Săcalculăm P (λ): P (λ) =λ 4 p 1 λ 3 + p λ p 3 λ + p 4, unde p 1 =tra =4, p = = 1, 1 1 p 3 = = 11, p 4 =deta = 6. Deci, P (λ) =λ 4 4λ 3 λ +11λ 6şi A 4 4A 3 A +11A 6I = 0. Avem A 4 4A 3 A +11A =6I A (A 3 4A A +11I) =6I A 1 = 1 A 3 4A A +11I 6 A 1 =
152 .5. SPAŢII EUCLIDIENE 153 Deoarece A 4 4A 3 A +11A 6I = 0, rezultă că A 4 4A 3 A +1A 7I= = A 4 4A 3 A +11A 6I +(A I) =A I= = Exerciţiul.51 În spaţiul euclidian R 3, dotat cu produsul scalar standard se consideră subspaţiul U = x R 3 x 1 x =0 ª. Să se determine complementul ortogonal U şi apoi să se determine proiecţiile ortogonale ale vectorului x = pe U şi U. Rezolvare. Determinăm o bază a subspaţiului U. Din x 1 x = 0 rezultă x 1 = x = α, x 3 = β cu α, β R. Deci o bazăaluiu este u1 = 1 1 0, u = ª. Complementul ortogonal al lui U este U = x R 3 hx, u 1 i = hx, u i =0 ª, adică U = x R 3 x 1 + x =0,x 3 =0 ª. ObazăaluiU este u 3 = ª. Să calculăm proiecţiile lui x pe cele două subspaţii. Descompunem pe x după vectorii u 1, u şi u 3 : x = α 1 u 1 + α u + α 3 u 3.Obţinemsistemul α 1 + α 3 =3 α 1 α 3 = 1 α =4 α 1 =1 α =4 α 3 = Deci, x = u 1 +4u +u 3. Proiecţiile ortogonale ale lui x sunt x 0 = u 1 +4u = U şi x 00 =u 3 = 0 U. Exerciţiul.5 Să se ortonormeze sistemul de funcţii t, t, t 3 în C [0, 1] R în raport cu produsul scalar hf,gi = 1 tf (t) g (t) dt. 0 Rezolvare. Aplicăm procedeul de ortogonalizare Gram-Schmidt. Fie f 1 = t, f = t, f 3 = t 3. Considerăm g 1 = f 1, g = f + α 1 g 1, g 3 = f 3 + α 31 g 1 +α 3 g. Conform procedeului de ortogonalizare avem α 1 = hf,g 1 i hg 1,g 1 i,.
153 154 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII α 31 = hf 3,g 1 i hg 1,g 1 i, α 3 R 1 0 t3 dt = 1 4, hf,g 1 i = R 1 µ R 1 t t t dt = 1 150, hf 3,g 1 i = t t t. = hf 3,g i hg,g i. Astfel obţinem g 1 = t, hg 1,g 1 i = 0 t4 dt = 1 5,α 1 = 4 5,g = t 4 5 t, hg,g i = Z 1 µt 45 t = 0 t 5 dt = 1 6,g 3 = t 3 3 t 10 7 Exerciţiul.53 Să se determine un produs scalar în R 3 înraportcucare baza B 0 = e 0 1 = 1 0 0, e 0 = 1 1 0, e 0 3 = ª este ortonormată. Rezolvare. Fie B = {e 1 =(1, 0, 0), e =(0, 1, 0), e 3 =(0, 0, 1)} baza standard a spaţiului R 3. Fie ρ (x, y) produsulscalarcăutat. Deoarece B 0 este ortonormată, rezultă că forma biliniară simetrică ρ (x, y) areîn bazab 0 matricea (ρ) B 0 = I 3. Matricea unei forme biliniare la schimbări de baze este dată de(ρ) B 0 = C T (ρ) B C,undeC este matricea de trecere de la B la B 0 C = Obţinem (ρ) B = C T 1 (ρ)b 0 C 1 = C T 1 I3 C 1 = C T 1 C 1 = = = Deci, ρ (x, y) =x 1 y 1 x 1 y x y 1 +x y x y 3 x 3 y +x 3 y 3. Verificare: ρ (e 0 1, e 0 1)=1,ρ(e 0 1, e 0 )=0,ρ(e 0 1, e 0 3)=0,ρ(e 0, e 0 1)=0, ρ (e 0, e 0 )=1,ρ(e 0, e 0 3)=0,ρ(e 0 3, e 0 1)=0, ρ(e 0 3, e 0 )=0, ρ(e 0 3, e 0 3)=1. Exerciţiul.54 Să se calculeze valorile proprii şi subspaţiile proprii pentru matricea A =(a ij ), a ij =1, i, j = 1,n. Rezolvare. Calculăm polinomul caracteristic P (λ).
154 .5. SPAŢII EUCLIDIENE 155 λ P (λ) =det(λi A) = 1 λ λ 1 Adunăm la prima linie celelalte linii: λ n λ n... λ n P (λ) = 1 λ =(λ n) 1 λ λ λ 1 Scădem prima coloană din celelalte: λ P (λ) = (λ n) 1 λ = (λ n) 0 λ = λ λ λ n 1 (λ n). Valorile proprii sunt λ 1 = 0 de multiplicitate n 1şi λ = n simplă. Vectorii proprii sunt daţi de soluţiile sistemului (λi A) X = 0. Pentru λ = 0obţinem x 1 x x n =0... x 1 x x n =0 Pentru λ = n obţinem (n 1) x 1 x x n =0 x 1 +(n 1) x x n =0... x 1 x +(n 1) x n =0 x 1 = α 1 R.... x n 1 = α n 1 R x n = a 1 α n 1 x 1 = x = = x n = α R. Subspaţiile proprii sunt: V λ1 = x R n x = α 1... α n 1 α 1 α n 1,αi R,i= 1,n 1 ª, V λ = x R n x = α α... α,α R ª. Obazăîn V λ1 este {u 1 = , u = ,..., u n 1 = }. Obazăîn V λ este v = ª. Exerciţiul.55 Se consideră formapătratică h (x) =x 1 +x x 3 +6x 1 x x 1 x 3 +x x 3. Să se determine forma canonică şi baza canonică prin metodele cunoscute şi să se verifice legea inerţiei.
155 156 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Rezolvare. Determinăm forma canonică folosind metoda lui Gauss. h (x) =(x 1 +3x 1 x x 1 x 3 )+x x 3 +x x 3 = " µ = x x 1 # x x 1 4 x x x 3 +x x 3 +x x 3 = µ = x x 1 x 3 5 x 5 x 3 +5x 1 x 3 = 5 (x x 3 ).Facem schimbarea de coordonate y 1 = x x 1 x 3 y = x x 3 y 3 = x 3 adică x x = x B 0 = µ x x 1 x 3 x 1 = y 1 3 y y 3 x = y + y, 3 x 3 = y 3, din care deducem y 1 y.matricea schimbării de bază y 3 dă baza canonică a formei pătratice ½ e 0 1 = 1 0 0, e 0 = µ 3 1 0, e 0 3 = ¾ încare ea are expresia h (x) = y1 5 y.deci signatura formei pătratice este (1, 1, 1). Să determinăm forma canonică folosind metoda transformărilor ortogonale. Calculăm polinomul caracteristic al matricei formei pătratice şi apoi valorile şi vectorii proprii: P (λ) = det(λi A) = λ 3 λ 15λ λ 1 = 3, λ =5,λ 3 =0, v 1 = 1 1, v = 1 1 0, v 3 = Deci, forma canonicăesteh (x) = 3y 1 +5y, baza canonică B 0 fiind formată din: e 0 1 = 1 kv 1 k v 1 = 1 1 1, e 0 = 1 6 kv k v = , e 0 3 = 1 kv 3 k v 3 = Transformarea de 3 coordonate care reduce forma pătratică laformacanonicăeste:
156 .6. EXPONENŢIALA DE ARGUMENT MATRICEAL x 1 x = x y 1 y y 3 Observăm că legea inerţiei se verifică, deoarece şi înacestcazamobţinut signatura (1, 1, 1). Prin metoda Jacobi a fost rezolvat la Exerciţiul Exponenţiala de argument matriceal Reamintim cădacă f (λ) este un polinom de variabila λ, f (λ) =b 0 λ m + b 1 λ m b m 1 λ + b m şi A este o matrice constantă, de ordinul n, am definit matricea f (A) prin formula f (A) =b 0 A m + b 1 A m b m 1 A + b m I, m şi n fiind numere naturale, fără nici o legăturăîntre ele. Ne punem problema cum putem defini funcţii de matrice şi anume cum putem defini matricea f(a) în cazulîn caref(x) esteofuncţie indefinit derivabilă oarecare. Una din metode este bazată pe dezvoltarea în serie Taylor a funcţiei f(x), folosind noţiunea, relativ complicată deseriedema- trice. Dacă f(x) =e x, seria Taylor în jurul punctului x =0corespunzătoare este e x =1+ x 1! + x xn + +! n! + şi prin înlocuire formală aluix cu A suntem conduşi la expresia: e A = I + 1 1! A + 1! A n! An +. Aceasta este o serie cu elemente matrici şi poate fi privităcaunansamblu de n seriidenumererealesaucomplexe. Propoziţia.1 Dacă A, B M n (R), AB = BA, atunci e A+B = e A e B. Demonstraţie. Fie e A = I + 1 1! A + 1! A n! An + şi e B = I + 1 1! B + 1! B n! Bn +. Folosind produsul în senscauchy adouăserii,obţinem e A e B =(I + 1 1! A + 1! A n! An + )(I +
157 158 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII 1 1! B + 1! B n! Bn + )=I + 1 1! (A + B)+ 1! (A +AB + B )+ 1 3! (A3 +3A B +3AB + B 3 )+ = e A+B. Propoziţia. Dacă I M n (R), matricea unitate, atunci e I = ei. Demonstraţie. e I = I + 1 1! I + 1! I n! In + =(1+ 1 1! + 1! )I = ei. n! Propoziţia.3 Dacă A M n (R) atunci (e A ) 1 = e A. Demonstraţie. Deoarece A şi A comută, deducem e A e A = e A e A = e 0 = I. Deci e A este inversabilă şi inversa ei este e A. Ne interesează calculul efectiv a lui e A. Pentru aceasta considerăm următoarele cazuri: I. Cazul în carea este matrice diagonală, A = D λ λ k λ 0 D =..., 0 λ k Dk 0 = λ n 0 0 λ k n e D = I + 1 1! D + 1! D n! Dn + = 1+ 1 λ = λ + 1! λ = λ 11 n + 1! λ n + e λ e λ 0 = e λn II. Cazul în carea este celulă Jordandeordinn corespunzătoare valorii proprii λ λ λ... 0 A = J n =... 1 = λi n + E n, unde 0 0 λ
158 .6. EXPONENŢIALA DE ARGUMENT MATRICEAL E n =... 1,... E n = ,, E n n = 0. e J n = e λi n+e n = e λi n I + 1 1! E n + 1 1! E n + + (n 1)! En 1 n = = e λ I + 1 1! E n (n 1)! En 1 n 1 1 1! 1 1! (n 1)! ! (n )! = e λ (n 3)!, II. Cazul în carea este o matrice Jordan J 1 0 e J 1 0 J J =..., atunci e J ej = J s 0 e J s Teorema.5 Dacă A, B M n (R), A şi B sunt matrice asemenea, B = C 1 AC, atunci e B = C 1 e A C. Demonstraţie. Ştim că B = C 1 A C,...,B k = C 1 A k C (inducţie) X e B 1 X X = k! Bk = C 1 AC = C 1 1 ( k! Ak )C = C 1 e A C. k=0 k=0 k=0 Consecinţe. 1. Dacă A este diagonalizabilă, D = P 1 AP, atunci e A = Pe D P 1.. Dacă A admite forma Jordan, J = P 1 AP, atunci e A = Pe J P 1 unde P este matricea modală. Exerciţiul.56 Fie matricea: A= Să se calculeze e A.
159 160 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Rezolvare. Polinomul caracteristic este: P (λ) =λ(λ 1) (λ 6). Pentru λ =0, vectorul propriu este v 1 = T ; pentru λ =1, A I = , iar vectorii proprii sunt: v = T, v 3 = T. Pentru λ =6, A I = este: v 4 = T. Obţinem D = H = e D = e e e 6,, H 1 = e A =Pe D P 1 = = 4, iar vectorul propriu e e e e6 1 6 e e e e e 0 0 e e e e e e e e Exerciţiul.57 Fie matricea A= Să se calculeze e A.., iar =
160 .6. EXPONENŢIALA DE ARGUMENT MATRICEAL 161 Rezolvare. Polinomul caracteristic este: P (λ) = (λ ) 3. Calculăm def(a I), (A I)x = θ implică x = 1 0 T, y = T deci există două serii de vectori proprii şi asociaţi. Cum în total trebuie să fie trei vectori proprii şi asociaţi rezultă căexistă o serie de lungime 1(un vector propriu) şi o serie de lungime (un vector propriu şi un asociat). Ca să dererminăm capul de serie; calculăm = = A I = , (A 3I) = , obazăîn ker(a 3I) :esten T 1 0 0, T, o T. Calculăm = 4, = = 0 0 0, vectorul propriu (6= θ) cap de serie pentru seria de lungime va fi, deexemplu,v1 1 = 1 1 T, iar vectorul asociat este: v 1 = T. Vectorul propriu din seria de lungime 1, v1, se alege unul din vectorii din ker(a 3I) astfelîncât {v1, 1 v, 1 v 1} să fie liniari independenţi. Alegem, de exemplu, v1 = T, det 1 = Matricea Jordan: J = ; H = e J 1 =(e ), J =I + E, E = µ 0 0 E = 0 0 µ , e J = e (I + 1 1! E )=e µ µ e e = 0 e.
161 16 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII µ e e J J 1 0 = 0 e J = e e e, 0 0 e H = ; H 1 = e A = e e e = e 1 0 e e 0 = 4e 3e 0. e e e În teoria ecuaţiilor diferenţiale, se utilizează destul de mult matricea exp (ta), notată şi e ta. Mai exact, se defineşte o funcţie F (t) =exp(ta) de variabila reală t (, ) şi luând valori în mulţimea matricelor de ordinul n, prinanalogiecufuncţia scalară f (t) = exp(at). Aceasta din urmă satisface ecuaţia diferenţială ẋ (t) = ax (t) şi condiţia iniţială x (0) = 1. Pentru cazul matriceal, vom considera ecuaţia diferenţială liniară Ẋ (t) =AX (t), cu condiţia X (0) = I (.9) în carex (t) este funcţia-matrice de ordinul n, alecărei elemente sunt funcţii de variabila independentă t, A este o matrice constantă deacelaşi ordin n, I este matricea unitate de ordinul n, iarẋ (t) estefuncţia - matrice obţinută prin derivarea în raportcut afiecărui element al lui X (t). Dacă notăm X (t) =col x (1) (t), x () (t),...,x (n) (t), se poate arăta că relaţiile (.9) sunt echivalente cu faptul că fiecarecoloană x (i) (t) a matricei X (t) satisface sistemul diferenţial liniar x (t) =Ax (t), x (i) (0) = T i (.10) vectorul iniţial x (i) (0) fiind al i-lea vector din baza standard din R n sau, cu alte cuvinte, coloana de rand i din matricea unitate I. Rezolvarea acestor n sisteme diferenţiale duce la aflarea coloanelor matricei X (t) = exp(ta). Se poate folosi şi notaţia exp (At). În cazurile n =, 3 găsirea matricei exp (ta) nu duce la calcule foarte complicate. Există şi o altă metodă de găsire a matricei exp (ta), care presupune folosirea transformatei Laplace, dar nu o prezentăm aici. µ 1 0 Exemplul.4 Fie I = matricea unitate de ordinul. Să seafle 0 1 exp (ti).
162 .6. EXPONENŢIALA DE ARGUMENT MATRICEAL 163 Rezolvare. Avem de rezolvat (de găsit soluţia generală) sistemul µ µ µ d x1 (t) 1 0 x1 (t) =.. dt x (t) 0 1 x (t) Soluţiasageneralăestex 1 (t) =c 1 e t, x (t) =c e t cu c 1,c =constante arbitrare. Pentru x 1 (0) = 1, x (0) = 0 avem prima coloană x (1) (t) = e t 0 T,luând c1 =1,c = 0. Pentru x 1 (0) = 0, x (0) = 1 avem a doua coloană x () (t) = 0 e t T,luând c 1 =0,c =1. În concluzie, rezultă µ µ e t 0 e 0 exp (ti) = 0 e t = e t I, exp (I) = = ei. 0 e µ a b Exemplul.5 Fie A = b a, cu b 6= 0. Să seafleexp (ta). Rezolvare. Sistemul x (t) = Ax (t) sescriepelarg,astfel ( ẋ1 (t) =ax 1 bx. ẋ (t) =bx 1 + ax Prin derivarea primei ecuaţii şi eliminarea variabilei x,seajungela ecuaţia liniară cu coeficienţi constanţi ẍ 1 aẋ 1 + a + b x 1 =0 acărei soluţie generală estex 1 = c 1 e at cos bt + c e at sin bt, undec 1 şi c sunt constante arbitrare. Folosind din nou prima ecuaţie, găsim şi cea de a doua funcţie a sistemului, x = c 1 e at sin bt c e at cos bt. Luând c 1 =1,c =0 obţinem prima coloană x (1) (t) a matricei exp (ta): x (1) (t) = µ e at cos bt e at sin bt, cu x (1) (0) = µ 1 0. Luând apoi c 1 =0,c = 1, obţinem a doua coloană x () (t): µ µ e x () (t) = at sin bt 0 e at, cu x cos bt () (0) =. 1 Deci, putem scrie µ e e ta = at cos bt e at sin bt e at sin bt e at cos bt Pentru t = 1,obţinem matricea exp (A). µ cos bt sin bt = e at sin bt cos bt.
163 164 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Exemplul.6 Se caută matricele B, pentru care µ a b e B =, b a cu a şi b reale, nu ambele nule. Rezolvare. Căutăm B de forma µ următoare u v B =. v u Cunoaştem exp (B) din exemplul precedent, deci trebuie să avem µ µ µ cos v sin v a b cos α sin α e u = = ρ, sin v cos v b a sin α cos α unde am notat ρ = a + b, a ρ =cosα şi b ρ =sinα. Obţinem eu = ρ şi v = α +kπ, k =întreg. Deci avem o infinitate de soluţii µ ln ρ (α +kπ) B k =,k =0, ±1, ±,... α +kπ ln ρ În ce priveşte alte proprietăţi ale funcţiei exponenţiale de argument matriceal, asemănătoare celor ale funcţiei clasice e x, din analiza matematică, prezentăm următoarea teoremă: Teorema.6 Fie A o matrice constantă, de ordinul n. Oricare ar fi numerele reale t şi τ, are loc egalitatea e ta e τa = e (t+τ)a. Demonstraţie. Notând ϕ (t) =e ta e τa (τ = constant) avem ϕ (t) =Aϕ (t), t (, ) şi ϕ (0) = e τa, unde am ţinut seama că e ta t=0 = I. e (t+τ)a (τ = constant), avem În mod asemănător, notând ψ (t) = ψ (t) =Aψ (t), t (, ) şi ψ (0) = e τa. Din teorema de existenţă şi unictate a soluţiei pentru sistemul matriceal Ẋ (t) = AX (t), rezultă că două soluţii care coincid într-un punct (în cazul de faţă, t = 0), sunt identice. Deci egalitatea ϕ (t) =ψ (t) arelocpentru orice t = real şi proprietatea enunţată a fost demonstrată.
164 .7. CONICE PE ECUAŢII REDUSE 165 În teoria ecuaţiilor diferenţiale, matricea e ta se numeşte matrice fundamentală pentru sistemul liniar x (t) = Ax (t) (în scriere matriceală). Importanţa cunoaşterii sale constă în aceea că soluţia generală a acestui sistem se scrie în formax (t) =e ta c, unde c este un vector constant arbitrar, din R n. Notând det e ta = W (t), numim acest determinant wronskianul soluţiilor particulare x (1) (t), x () (t),..., x (n) (t) (coloanele matricei e ta ). Se arată că are loc formula lui Liouville t t (tr W (t) =W (t 0 ) e A)dτ 0, oricare ar fi t şi t 0 reali. În cazul nostru, matricea A este constantă şi P tr A = n a ii = constant. Luând t =1şi t 0 =0,găsim i=1 det e A = e tr A = e a 11+a + +a nn. P Pe de altă parte, avem n λ i =tra, unde λ i sunt autovalorile matricei i=1 A. Putem deci să scriem det e A = e λ1 e λ e λ n, adică dacăluăm f (λ) =e λ,avemdetf (A) =f (λ 1 ) f (λ ) f (λ n ), formulă careamgăsit-o prima datăîn cazulf (λ) = polinom în variabilaλ..7 Conice pe ecuaţii reduse Fie un plan (π) şi un reper ortonormat R =(O; i, j )..7.1 Cercul Definiţia.7 Cercul este locul geometric al punctelor din plan care au proprietatea că sunt egal depărtate, la distanţă R, de un punct fix. Punctul fix, M 0 (x 0,y 0 ) se numeşte centrul cercului iar R se numeşte raza cercului. Fie M(x, y) un punct oarecare al cercului. Dacă r şi r 0 sunt vectorii de poziţie ai punctelor M respectiv C, atunci kr r 0 k = R (x x 0 ) +(y y 0 ) = R echivalent cu (x x 0 ) +(y y 0 ) = R. (.11) Ecuaţia (.11) se numeşte ecuaţia carteziană a cercului de centru M 0 (x 0,y 0 )şi de rază R. Pentru cercul cu centrul în origine,ecuaţia este x + y = R.
165 166 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Teorema.7 Oecuaţiedeforma x + y +ax +by + c =0cu a + b c>0 (.1) reprezintă un cerc cu centrul înpunctul( a, b) şi de rază R = a + b c. Demonstraţie. Putem scrie (x + a) +(y + b) + c a b =0,deci cu x 0 = a, y 0 = b, R = a + b c>0obţinem (.11). Deducem ecuaţiei tangentei la cerc într-un punct al său, M 1 (x 1,y 1 ). Dacă P (x, y) esteunpunctoarecareaparţinând tangentei, atunci vectorul CM 1 = (x 1 x 0 ) i +(y 1 y 0 ) j este perpendicular pe vectorul M 1 P =(x x 1 ) i +(y y 1 ) j,adică h CM 1, M 1 P i =0 (x 1 x 0 )(x x 1 )+(y 1 y 0 )(y y 1 )=0 (x 1 x 0 )[(x x 0 )+(x 0 x 1 )] + (y 1 y 0 )[(y y 0 )+(y 0 y 1 )] = 0 (x 1 x 0 )(x x 0 )+(y 1 y 0 )(y y 0 ) [(x 1 x 0 ) +(y 1 y 0 ) ]=0 (x 1 x 0 )(x x 0 )+(y 1 y 0 )(y y 0 )=R. (.13) Ecuaţia (.13) se numeşte ecuaţia tangentei la cerc dusă printr-un punct al cercului obţinută prindedublare. Ecuaţiile ½ parametrice ale cercului: x = x0 + R cos ϕ,ϕ [0, π). y = y 0 + R sin ϕ ½Dacă cercul are centrul în origineobţinem parametrizarea: x = R cos ϕ,ϕ [0, π). y = R sin ϕ.7. Elipsa Definiţia.8 Elipsa este locul geometric al punctelor din plan care au proprietatea că suma distanţelor la două punctefixe, F şi F 0 (numite focare), este constantă şi egală cua, a R +. Figura.1.
166 .7. CONICE PE ECUAŢII REDUSE 167 Deducerea ecuaţiei elipsei Pentru a deduce ecuaţia elipsei alegem un reper preferenţial: (figura.1) originea O a reperului se consideră în mijloculsegmentuluiff 0, versorul i este versorul vectorului OF iar versorul j se alege perpendicular pe i în O. Din felul în care am ales reperul R deducem că OF = c i şi OF 0 = c i,unde c>0. Deci F (c, 0),F 0 ( c, 0) şi dacă M(x, y) esteun punct al locului geometric, atunci MF + MF 0 =a, a > 0 fixat. Rezultă p (x c) + y + p p (x + c) + y =a (x c) + y =a p (x + c) + y Ridicând la pătrat şi efectuând simplificările obţinem: a p (x + c) + y = a + xc. (.14) Pentru x> a ridicăm din nou la pătrat şi efectuând simplificările c obţinem: (a c )x + a y a (a c )=0. Notăm a c = b (a>c deoarece MF + MF 0 > FF 0 ) şi obţinem b x + a z a b =0 x a + y 1=0. (.15) b Ecuaţia (.15) reprezintă ecuaţia elipsei de semiaxe a şi b. Din (.14) obţinem c a x + a = p (x + c) + y. Notăm e = c.ese numeşte excentricitatea elipsei şi obţinem a e(x + a e )=p (x + c) + y. (.16) Observăm că e<1, în cazul elipsei. x+ a reprezintă distanţa de la e punctul M(x, y) la dreapta de ecuaţie x = a, numită directoarea elipsei. e Elipsa are două drepte directoare de ecuaţii x = a e şi x = a iar punctele e elipsei se găsesc între aceste drepte, x a> a e şi x a<a e (a e = a c > a). Relaţia (.16) ne arată că raportul distanţelor de la M la F 0 şi la dreapta directoare de ecuaţie x = a este constantă şi egală cu excentricitatea e elipsei. Observaţia.8 Axa Ox intersecteazăelipsaînpunctelea 0 ( a, 0) şi A(a, 0) numite vârfurile elipsei. Axa Oy intersectează elipsa tot în vârfuri, B(0,b), B 0 (0, b). Axele Ox şi Oy suntaxedesimetriepentruelipsă. Punctul O(0, 0) numit centrul elipsei este centru de simetrie.
167 168 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Ecuaţia (.17) a tangentei la elipsă dusă printr-un punct (x 0,y 0 )depe elipsă seobţine prin dedublare. xx 0 a + yy 0 1=0. (.17) b Reprezentarea ½ paramertică a elipsei: x = a cos ϕ,ϕ [0, π). y = b sin ϕ.7.3 Hiperbola Definiţia.9 Hiperbola este locul geometric al punctelor din plan care au proprietatea că diferenţa distanţelor la două punctefixe, F şi F 0 (numite focare), este constantă şi egală cua, a R +. Deducerea ecuaţiei hiperbolei. Pentru a deduce ecuaţia hiperbolei alegem un reper preferenţial la fel ca şi în cazul elipsei (figura.): originea O a reperului se alege în mijlocul segmentului FF 0, versorul i este versorul vectorului OF iar versorul j se alege perpendicular pe i în O. Figura.. Din felul în care am ales reperul R deducem că OF = c i şi OF 0 = c i,unde c>0. Deci F (c, 0),F 0 ( c, 0) şi dacă M(x, y) esteunpunctal hiperbolei, atunci MF MF 0. =a, a > 0 fixat, MF > MF 0 Rezultă p (x c) + y p p (x + c) + y =a (x c) + y =a + p (x + c) + y. Ridicând la pătrat şi efectuând simplificările obţinem: a p (x + c) + y = a xc. (.18)
168 .7. CONICE PE ECUAŢII REDUSE 169 Pentru x< a ridicăm din nou la pătrat şi efectuând simplificările c obţinem: (a c )x + a y a (a c )=0. Notăm c a = b (a<c deoarece MF MF 0 < FF 0 ) şi obţinem b x a z a b =0 x a y 1=0. (.19) b Ecuaţia (.19) reprezintă ecuaţia hiperbolei de semiaxe a şi b. Din (.18) obţinem c a x a = p (x + c) + y. Notăm e = c a, numită excentricitatea hiperbolei şi obţinem e(x + a e )=p (x + c) + y. (.0) Observăm că e>1, în cazulhiperbolei.x+ a reprezintă distanţa de e la punctul M(x, y) la dreapta de ecuaţie x = a, numită directoarea e hiperbolei. Hiperbola are două dreptedirectoarede ecuaţii x = a e şi x = a e iar punctele hiperbolei se găsesc în exteriorul acestor drepte, x a< a e şi x a>a e (a e = a c <a). Relaţia (.0) ne aratăcăraportuldistanţelor de la M la F 0 şi la dreapta directoare de ecuaţie x = a este constantă şi egală cu excentricitatea e hiperbolei. Din ecuaţia (.19) a hiperbolei obţinem: y = a b x a sau y = a b x a. Rezultă cădrepteley = ± b x sunt asimptote. a Tangenta la hiperbolă xx 0 a yy 0 1=0. (.1) b Ecuaţia (.1) a tangentei la hiperbolă dusă printr-un punct (x 0,y 0 )de pe hiperbolă seobţine prin dedublare. Observaţia.9 Hiperbola x a y +1=0. (.) b este numităşi hiperbola conjugată (figura.3) hiperbolei (.19). Are aceleaşi asimptote, aceleaşi axe.
169 170 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII y x Figura.3. Observaţia.10 Dacă a = b, hiperbola se numeşte echilateră şi are ecuaţia x y = a. Asimptotele sale sunt bisectoarele axelor, x = y şi x = y. Tot hiperbolă echilateră estexy = ±a. În acest caz asimptotele hiperbolei sunt axele de coordonate. Reprezentarea ½ paramertică ahiperbolei: x = a ch ϕ,ϕ R. y = b sh ϕ.7.4 Parabola Definiţia.10 Parabola este locul geomertic al punctelor din plan egal depărtate de un punct fix, F, numit numit focar, şi o dreaptă dată, numită dreaptă directoare. y x Figura.4. Deducerea ecuaţiei parabolei. Pentru a deduce ecuaţia parabolei alegem un reper preferenţial (figura.4): originea O a reperului se alege în vârful parabolei, versorul i este versorul vectorului OF iar versorul j se alege perpendicular pe i în O. Din felul în care am ales reperul R deducem că OF = p i şi dreapta directoare de ecuaţie x = p. Trebuie săavemx + p = r(x p ) + y
170 .8. CUDRICEPEECUAŢII REDUSE 171 x + px + p 4 = x px + p 4 + y y =px. (.3) Tangenta la parabolă yy 0 = p(x + x 0 ). (.4) Ecuaţia (.4) a tangentei la parabolă dusă printr-un punct (x 0,y 0 )de pe parabolă seobţine prin dedublare. Observaţia.11 Excentricitatea parabolei este e = 1. O reprezentare parametrică aparaboleiestey = t, x = t /(p)..8 Cudrice pe ecuaţii reduse.8.1 Sfera Definiţia.11 Locul geometric al punctelor din spaţiu M(x, y, z) cu proprietatea că distanţa lor la un punct fix M 0 (x 0,y 0,z 0 ) este constantă se numeste sferă (suprafaţă sferică). Dacă r respectiv r 0 sunt vectorii de poziţie ai punctelor M şi M 0, atunci kr r 0 k = R. M 0 (x 0,y 0,z 0 )senumeşte centrul sferei, iar r este raza sferei. (Figura.5). Teorema.8 Punctul M(x, y, z) aparţine sferei de centru C(x 0,y 0,z 0 ) şi rază R dacă şi numai dacă (x x 0 ) +(y y 0 ) +(z z 0 ) = R. Demonstraţie. M aparţine sferei km 0 Mk = R kr r 0 k = R p (x x0 ) +(y y 0 ) +(z z 0 ) = R (x x 0 ) +(y y 0 ) +(z z 0 ) = R. Figura.5. Studiem ecuaţia x + y + z +ax +by +cz + d =0casă stabilim în ce caz ea reprezintă ecuaţia unei sfere. Această ecuaţie se mai poate scrie
171 17 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII de forma (x + a) +(y + b) +(z + c) = a + b + c d. De aici observăm că dacă a) a + b + c d>0 ecuaţia reprezintă osferă de centru ( a, b, c) şi rază R = a + b + c d. b) a + b + c d = 0 ecuaţia reprezintă un punct de coordonate ( a, b, c); c) a + b + c d<0ecuaţia reprezintă osferăimaginară. Ecuaţia x + y + z +ax +by +cz + d =0cua + b + c d>0 reprezintă ecuaţia carteziană generală a sferei. Ecuaţia sferei cu centru în origineşi de rază R este x + y + z = R. Observăm că elipsoidul este o mulţime mărginită şi închisă, deci compactă..8. Elipsoidul Definiţia.1 Elipsoidul este cuadrica reprezentată, într-un reper convenabil, prin ecuaţia: x a + y b + z c =1,a,b,c R +. (.5) Figura.6. Se observă că reperul în raport cu care este scrisă ecuaţia are originea, axele şiplaneledecoordonateelementedesimetriealecuadricei. În concluzie elipsoidul admite trei plane de simetrie, trei axe de simetrie şi un centru de simetrie. Punctele în care axele de coordonate intersectează suprafaţa se numesc vârfurile elipsoidului şi ele sunt: A(a, 0, 0), A 0 ( a, 0, 0), B(0,b,0), B 0 (0, b, 0), C(0, 0,c), C 0 (0, 0, c). Numerele a, b, c se numesc semiaxele elipsoidului. Pentru reprezentarea grafică seutilizează metoda intersecţiei cu planele de coordonate şi cu plane paralele cu planele de coordonate. Pentru z = h, obţinem curba: x a + y h =1,z = h. Această intersecţieestemulţimea b c vidă dacă h >c,este un punct (dublu) pentru h = c, C(0, 0,c)şi pentru h = c, C 0 (0, 0, c). Pentru c < h < c, prima ecuaţie a curbei
172 .8. CUDRICEPEECUAŢII REDUSE 173 de intersecţie poate fi scrisă deforma: + =1care a (1 h c ) b (1 h c ) reprezintă, pentru fiecare c <h<c,ecuaţia unei elipse. Analog se studiază secţiunile cu plane paralele cu plane paralele cu xoz, yoz astfel încât obţinem imaginea din figura.6. Observăm că elipsoidul este o mulţime mărginită şi închisă, deci compactă. Ecuaţia planului tangent la elipsoid printr-un punct al elipsoidului se obţine prin dedublare. Fie M 0 (x 0,y 0,z 0 ) un punct de pe elipsoidul de ecuaţie (.5). Ecuaţia planului tangent prin acest punct este xx 0 a + yy 0 b + zz 0 c =1 O reprezentare parametrică a elipsoidului se obţine de forma: x = a cos ϕ sin ψ h y = b sin ϕ sin ψ,ϕ [0, π),ψ π, π i. z = c cos ψ Suprafaţa reprezentată prin ecuaţia: x a + y b + z c +1=0,a,b,c>0se numeşte elipsoid imaginar..8.3 Hiperboloidul cu o pânză Definiţia.13 Hiperboloidul cu o pânză este cuadrica reprezentată, într-un reper convenabil, prin ecuaţia: x a + y b z c 1=0,a,b,c R +. (.6) Numerele a, b, c se numesc semiaxele hiperboloidului. x y Figura.7.
173 174 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Reperul în raport cu care este scrisă ecuaţia are originea, axele şi planele de coordonate elemente de simetrie ale cuadricei. Acesta are patru vârfuri, A(a, 0, 0), A 0 ( a, 0, 0), B(0,b,0),B 0 (0, b, 0). Prin metoda intersecţiei cu planele de coordonate şi cu plane paralele cu acestea se obţine forma cuadricei, Figura.7..Hiperboloidul cu o pânză este o suprafaţă nemărginită. Cuadrica x a + y b z =0senumeşte conul asimptotic al hiperboloidului cu o pânză (Figura c.8). Figura.8. Ecuaţia planului tangent la hiperboloidul cu o pânză printr-un punct al său se obţine prin dedublare. Fie M 0 (x 0,y 0,z 0 ) un punct de pe hiperboloidului cu o pânză deecuaţie (.6). Ecuaţia planului tangent prin acest punct este xx 0 a + yy 0 b zz 0 c =1. O reprezentare parametrică a hiperboloidului cu o pânză este: x = a cos ϕ cos ψ y = b sin ϕ ³,ϕ [0, π),ψ π cos ψ, π. z = c tg ψ O altă reprezentare parametrică a hiperboloidului cu o pânză se obţine, ţinînd seama că 1+sh ψ =ch ψ, şi luând z = c sh ψ: x = a cos ϕ ch ψ y = b sin ϕ ch ψ z = c sh ψ,ϕ [0, π),ψ R.
174 .8. CUDRICEPEECUAŢII REDUSE Hiperboloidul cu două pânze Definiţia.14 Hiperboloidul cu două pânze este cuadrica dată, întrun reper convenabil, prin ecuaţia x a y b z c 1=0,a,b,c R + (.7) Numerele a, b, c se numesc semiaxele hiperboloidului. Figura.9. Hiperboloidul cu două pânze are aceleaşi simetrii ca şi elipsoidul. Are două vârfuri C(0, 0,c),C 0 (0, 0,c). Se observă căintersecţiile hiperboloidului cu două pânze cu planele x =0şi y =0şi cu plane paralele cu acestea sunt hiperbole. Intersecţiile cu plane paralele cu yoz, z = h, h >c, sunt elipse. Planele z = h,cu c < h < c,nu intersectează cuadrica (figura.9). Hiperboloidul cu două pânze este o mulţime nemărginită. Cuadrica x a y b z =0senumeşte conul asimptotic al hiperboloidului cu două c pânze. (figura.10). Ecuaţia planului tangent la hiperboloidul cu două pânze printrun punct al său se obţine prin dedublare. Fie M 0 (x 0,y 0,z 0 ) un punct de pe hiperboloidului cu două pânze de ecuaţie (.7). Ecuaţia planului tangent prin acest punct este xx 0 a yy 0 b zz 0 c =1. O reprezentare parametrică a hiperboloidului cu două pânze este: x = a ch ψ y = b cos ϕ sh ψ,ϕ [0, π),ψ R +. z = c sin ϕ sh ψ
175 176 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII.8.5 Paraboloidul eliptic Definiţia.15 Paraboloidul eliptic este cuadrica dată, într-un reper convenabil, prin ecuaţia x a + y =z,a,b > 0. (.8) b Figura.10. Planele de coordonate yoz şi xoz suntplanedesimetrie,iaraxaoz este axă desimetrieasuprafeţei. Paraboloidul eliptic nu are centru de simetrie. Intersecţia cu plane paralele cu xoy este fie mulţimea vidă, fie o elipsă, iar intersecţia cu plane paralele cu xoz şi yoz sunt parabole (figura.10). Ecuaţia planului tangent la paraboloidul eliptic printr-un punct al său se obţine prin dedublare. Fie M 0 (x 0,y 0,z 0 ) un punct de pe paraboloidului eliptic de ecuaţie (.8). Ecuaţia planului tangent prin acest punct este xx0 a + yy 0 b = z + z 0. O reprezentare parametrică a paraboloidului eliptic se obţine luând z = v : x = aψ cos ϕ y = bψ sin ϕ z = 1 ψ, (u, v) [0, π) [0, )..8.6 Paraboloidul hiperbolic Definiţia.16 Paraboloidul hiperbolic este cudrica dată, într-un reper convenabil, prin ecuaţia x a y =z, a, b > 0 (.9) b
176 .9. GENERĂRI DE SUPRAFEŢE 177 Figura.11. PlaneledecoordonateyOz şi xoz sunt plane dde simetrie, iar axa Oz este axă desimetrieasuprafeţei. Paraboloidul hiperbolic nu are centru de simetrie. Intersecţiile cu planele z = h 6= 0 sunt hiperbole. Pentru h =0obţinem x a y =0, adică o pereche de drepte secante prin origine. b Punctul O este singurul vârf al suprafeţei. Intersecţiile suprafeţei cu plane paralele cu planul yoz şi xoz sunt parabole. Ecuaţia planului tangent la paraboloidul hiperbolic printr-un punct al său se obţine prin dedublare. Fie M 0 (x 0,y 0,z 0 )unpunctdepe paraboloidului hiperbolic de ecuaţie (.9). Ecuaţia planului tangent prin acest punct este: xx 0 a yy 0 b = z + z 0. O reprezentare parametrică a paraboloidului eliptic se obţine luând: x = aϕ y = bψ z = 1, (ϕ, ψ) R. (ϕ ψ ).9 Generări de suprafeţe.9.1 Generarea suprafeţelor cilindrice Definiţia.17 Se numeşte suprafaţă cilindrică suprafaţa care se obţine prin deplasarea unei drepte variabile (d 1 ), paralelă cu o dreaptă fixă (d) şi care se sprijină peocurbă fixă (γ). Dreapta (d 1 )senumeşte generatoarea suprafeţei cilindrice, iar curba (γ) se numeşte curbă directoare. Teorema.9 Ecuaţia suprafeţei cilindrice obţinute prin deplasarea unei drepte paralele cu dreapta
177 178 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII ½ µ A1 x + B (d) 1 y + C 1 z + D 1 =0 A x + B y + C z + D =0, rang A1 B 1 C 1 =, A B C şi care ½se sprijină pecurba G1 (x, y, z) =0 (γ) G (x, y, z) =0 este F (A 1 x + B 1 y + C 1 z + D 1,A x + B y + C z + D )=0. (.30) Demonstraţie. Ecuaţiile tuturor dreptelor din spaţiu paralele cu dreapta (d) suntdeforma ½ A1 x + B 1 y + C 1 z + D 1 = λ A x + B y + C z + D = µ,λ,µ R. (.31) Dindrepteledatedeecuaţii (.31) intersectează cele care intersectează curba directoare (γ). Aceatea sunt generatoare ale suprafeţei cilindrice. Rezultă căsistemul A 1 x + B 1 y + C 1 z + D 1 = λ A x + B y + C z + D = µ G 1 (x, y, z) =0 G (x, y, z) =0 trebuie să fie compatibil. Eliminăm x, y, z şi obţinem o relaţie între λ şi µ de forma F (λ,µ) = 0, numită condiţie de compatibilitate. Înlocuind parametrii λ şi µ din ecuaţiile (.31) în condiţia de compatibilitate,obţinem ecuaţia (.30). Exemplul.7 Să sescrieecauţia suprafeţei cilindrice a cărei curbă directoare este elipsa x a + y =1,z =0şi generatoarele paralele cu axa Oz. b Rezolvare. Axa Oz are ecuaţiile x =0,y =0, iardrepteleparalelecuaxa Oz au ecuaţiile x = λ, y = µ. rezultă căsistemul x = λ y = µ x a + y b =1 λ a + µ =1(condiţia de compatibilitate). b z =0 Înlocuind parametrii obţinem ecuaţia x a + y =1, care în spaţiu reprezintă un cilindru eliptic (figura b.1).
178 .9. GENERĂRI DE SUPRAFEŢE 179 Figura.1. Observaţia.1 Ecuaţiile x a y b =1,y =px reprezintă în spaţiu ecuaţia unui cilindru hiperbolic respectiv cilindru parabolic. Exemplul.8 Să se determine proiecţia cercului (din spaţiu!) de ecuaţii x + y + z =1,y z = 0 pe planul xoy. Rezolvare. Proiecţia cercului pe planul xoy este intersecţia dintre acest plan şi cilindrul care are curba directoare dată de ecuaţiile cercului iar generatoarea paralelă cuaxaoz. x = λ x = λ y = µ y = µ x + y + z =1 z = µ y z =0 λ +µ =1 Condiţia de compatibilitate este λ +µ =1. Înlocuind parametrii, obţinem ecuaţia x +y =4. Proiecţia cerculului pe planul xoy este elipsa de ecuaţii x +y =4,z =0. Observaţia.13 Cilindrul eliptic, hiperbolic, parabolic sunt cuadrice degenerate..9. Generarea suprafeţelor conice Definiţia.18 Se numeşte suprafaţă conică suprafaţa generată de o dreptă variabilă (d) care trece printr-un punct fix V şi care se sprijină peo curbă fixă (γ). Dreapta (d) senumeşte generatoarea suprafeţei conice, punctul fix V se numeşte vârful conului iar curba (γ) senumeşte curbă directoare. Teorema.10 Ecuaţia suprafeţei conice cu vârful în punctul de intersecţie al planelor A 1 x + B 1 y + C 1 z + D 1 =0 A x + B y + C z + D =0 A 3 x + B 3 y + C 3 z + D 3 =0, rang A 1 B 1 C 1 A B C A 3 B 3 C 3 =3,
179 180 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII şi care ½se sprijină pecurba G1 (x, y, z) =0 (γ) G (x, y, z) =0 este F ( A 1x + B 1 y + C 1 z + D 1, A x + B y + C z + D )=0. A 3 x + B 3 y + C 3 z + D 3 A 3 x + B 3 y + C 3 z + D 3 (.3) Demonstraţie. Ecuaţiile tuturor dreptelor din spaţiu care trec prin punctul V sunt de forma ½ A1 x + B 1 y + C 1 z + D 1 = λ(a 3 x + B 3 y + C 3 z + D 3 ) A x + B y + C z + D = µ(a 3 x + B 3 y + C 3 z + D 3 ),λ,µ R. (.33) Din dreptele date de ecuaţiile (.33) sunt generatoare ale suprafeţei conice numai cele care intersectează curba directoare (γ). Rezultă că sistemul A 1 x + B 1 y + C 1 z + D 1 = λ(a 3 x + B 3 y + C 3 z + D 3 ) A x + B y + C z + D = µ(a 3 x + B 3 y + C 3 z + D 3 ) G 1 (x, y, z) =0 G (x, y, z) =0 trebuie să fie compatibil. Eliminăm x, y, z şi obţinem o relaţie între λ şi µ de forma F (λ,µ) =0, numităcondiţie de compatibilitate. Înlocuind parametrii λ şi µ în condiţia de compatibilitate, obţinem ecuaţia (.3). Exemplul.9 Să sescrieecuaţia suprafeţei conice cu vârful înpunctul P (0, 0, 1) şi care conţine elipsa de ecuaţii: z =0, x a + y b =1. Rezolvare. Ecuaţiile familiei de drepte care trec prin punctul P şi nu sunt paralele cu planul xoy sunt: x = λ(z 1), y= µ(z 1), λ,µ R. Aceste drepte trebuie să intersecteze elipsa, adică sistemul x = λ(z 1) y = µ(z 1) z =0 x a + y b =1 trebuie să fie compatibil. Eliminăm x, y, z între ecuaţiile sistemului şi obţinem condiţia de compatibilitate, λ a + µ = 1. Prin eliminarea parametrilor λ şi b x µ între această ecuaţie şi ecuaţiile familiei de drepte se obţine a (z 1) +
180 .9. GENERĂRI DE SUPRAFEŢE 181 y x =1 b (z 1) a + y b =(z 1) (figura.13). O astfel de suprafaţă conică senumeşte conul pătratic. Conul pătratic este o cuadrică degenerată. Figura Generarea suprafeţelor de rotaţie Definiţia.19 Se numeşte suprafaţă derotaţie suprafaţa generată de ocurbă (γ) care se roteşte, fără alunecare,în jurul unei drepte fixe (d). Dreapta (d) senumeşte axaderotaţie asuprafeţei de rotaţie. Observaţia.14 În mişcarea de rotaţie definită, un punct al curbei (γ) descrie un cerc (Γ) cu centrul pe axa de rotaţie, iar planul în careseaflă cercul este perpendicular pe axă. Deci suprafaţa de rotaţie poate fi privită ca fiind generată de punctele cercurilor (Γ) cu centrele pe (d), situate în plane perpendiculare pe (d) şi care se sprijină pe curba (γ). Teorema.11 Ecuaţia suprafeţei de rotaţie a cărei axă de rotaţie are ecuaţia (d) : x x 0 = y y 0 l m = z z 0 n şi care ½se sprijină pecurba G1 (x, y, z) =0 (γ) G (x, y, z) =0 este F ( p (x x 0 ) +(y y 0 ) +(z z 0 ),lx+ my + nz) =0. (.34) Demonstraţie. Cercurile (Γ) seobţin prin intersecţia unei sfere cu centrul pe axa de rotaţie şi rază variabilă cu un plan variabil perpendicular pe (d) : ½ (x x0 ) +(y y 0 ) +(z z 0 ) = λ. lx + my + nz = µ
181 18 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Pentru ca cercul săsesprijinepecurba(γ) sistemulurmător (x x 0 ) +(y y 0 ) +(z z 0 ) = λ lx + my + nz = µ G 1 (x, y, z) =0 G (x, y, z) =0 trebuie să fie compatibil. Eliminăm x, y, z şi obţinem o relaţie între λ şi µ de forma F (λ,µ) =0, numităcondiţie de compatibilitate. Înlocuind parametrii λ şi µ în condiţia de compatibilitate, obţinem ecuaţia (.34). Exemplul.10 Să se determine ecuaţia suprafeţei obţinută prinrotaţia în jurul axei Oz a hiperbolei (γ) :x =0,yz =1. Rezolvare. Familia de cercuri care generează aceastăsuprafaţă are ecuaţiile z = λ, x + y = µ., λ R,µ R +, cercuri care trebuie să se intersecteze cu una din ramurile hiperbolei (γ) :x =0,yz =1. Condiţia de compatibilitate a sistemului format din cele patru ecuaţii este 1 λ = µ. Ecuaţia suprafeţei de rotaţie este x + y = 1.Suprafaţaare z două pânze de ecuaţii, respectiv: 1 z = p x + y, 1 z = p x + y..9.4 Generatoarele rectilinii ale cuadricelor Cuadricele degenerate (cilindrul eliptic, hiperbolic, parabolic, conul pătratic), suprafaţa cilindrică şi suprafaţa conică, au proprietatea că pot fi descrise de o dreaptăînmişcare supusă anumitorcondiţii. Dintre cuadricele nedegenerate hiperboloidul cu o pânză şi paraboloidul hiperbolic au această proprietate. Ecuaţia (.6) a hiperboloidului cu o pânză se poate scrie: x a z y =1 c b sau (x a z c )(x a + z c )=(1 y b )(1 + y b ), ecuaţie care poate fi considerată carezultând prin eliminarea parametrilor λ şi µ din ecuaţiile ( x a + z c )=λ(1 + y b ), (x a z c )= 1 λ (1 y ), (.35) b ( x a + z c )=µ(1 y b ), (x a z c )= 1 µ (1 + y b ). (.36) Ecuaţiile (.35) şi (.36) reprezintă două familii de drepte. Dacă (x, y, z) sunt coordonatele unui punct M situat pe una din cele două drepte, ele vor verifica şi ecuaţia hiperboloidului, deci punctul M aparţine hiperboloidului.
182 .9. GENERĂRI DE SUPRAFEŢE 183 Deci pentru orice valori ale parametrilor λ şi µ aceste drepte aparţin cuadricei. Când λ şi µ variază, cele două familii de drepre generează suprafaţa. Spunem că drepteledeecuaţii (.35) şi (.36) formează familii de generatoare rectilinii ale hiperboloidului cu o pânză deecuaţie (.6). Analog ecuaţia (.9) a paraboloidului hiperbolic se poate scrie ( x a + y b )(x a y b )=z, de unde rezultă căşi această cuadrică posedădouă familii de generatoare rectilinii de ecuaţii ( x a + y b )=λ, (x a y b )=z λ şi (x a y b )=µ, (x a + y b )=z µ. Cuadricele care au generatoare rectilinii se mai numesc şi cuadrice riglate. Exerciţiul.58 Fie paraboloidul hiperbolic dat prin ecuaţia x 9 y 4 = z şi punctul M 0 (0,, 1). a) Să se scrie ecuaţiile generatoarelor rectilinii care trec prin M 0. b) Să se calculeze cosinusul unghiului dintre aceste generatoare. Rezolvare. Ecuaţiile generatoarelor rectilinii se obţin plecând de la x ( x 3 y )(x 3 + y )=z (d 3 y = λ x λ) x 3 + y = y = µ, (d µ ) λ z x 3 y = 1 µ z Impunem condiţia ca punctul M 0 (0,, 1) să segăsească pedreaptă 0 3 = λ x = 1 λ = 1 3 y = 1 λ ( 1) x 3 + y = z şi = µ x 0 3 = 1 µ =1 3 + y =1 µ ( 1) x 3 y = z Pentru a calcula unghiul dintre cele două drepte determinăm direcţiile lor i j k u 1 = = 1 i 1 3 j k, u = 1 cos( u 1, u )= h u 1, 1 u i k u 1 kk u k = = i j 1 6 k.
183 184 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII.10 Exerciţii propuse Exerciţiul.59 Fie A o matrice pătratică de ordinul n şi f (λ) =b 0 λ m + b 1 λ m b m 1 λ + b m un polinom oarecare. Să se arate că orice vector propriu al lui A este vector propriu şi pentru matricea f (A) =b 0 A m + b 1 A m b m 1 A + b m I. Exerciţiul.60 Fie A şi B două matrice pătratice de ordinul n asemenea. Să se arate că A T şi B T sunt asemenea. Dacă f(t) =a 0 t n + a 1 t n a n 1 t + a n este un polinom atunci f(a) şi f(b) sunt asemenea. Exerciţiul.61 Fie A de forma α 1 0 A = 0 α α în careα este constant şi fie f (x) un polinom oarecare. Să se arate că f(α) f 0 1 (α) f (A) = f 00 (α) 0 f(α) f 0 (α). 0 0 f 0 (α) Indicaţie. Scriem f (x)=f (α)+(x α) f 0 (α)+ 1 (x α) f 00 (α)+ Exerciţiul.6 Fie A şi B două matrice de acelaşi ordin, astfel încât A + B = AB. Să se arate că A I este inversabilă., Indicaţie. (A I)(B I) =I det (A I) 6= 0. Exerciţiul.63 Se consideră matricea A = Să seafleunpolinomf (x) degrad, astfel încât matricea f (A) să aibă autovalorile µ 1 = µ =1, µ 3 =0. Să sescrief (A). Indicaţie. Căutăm f (x) =b 0 + b 1 x + b x. Matricea f (A) trebuiesă aibă autovalorilef (λ 1 ), f (λ ), f (λ 3 ) unde λ 1 =1,λ =,λ 3 =3sunt autovalorile lui A. Seaflăîn mod unic coeficienţii b 0, b 1, b.
184 .10. EXERCIŢII PROPUSE 185 Exerciţiul.64 Fie V 3 un spaţiu vectorial real de dimensiune 3, iar sistemul de vectori e (1), e (), e (3)ª obazăasa; f : V 3 V 3 este aplicaţia liniară acărei matrice în baza dată este 3 4 A = Să segăsească obază v (1), v (), v (3)ª,în V 3, în care matricea transformării liniare f să fie de tip diagonal. Indicaţie. Se caută vectorii proprii ai transformării f. Autovalorile sunt λ 1 =1,λ =,λ 3 = 1. Exerciţiul.65 Se dă formapătratică f (x) =5x 1 +6x +4x 3 4x 1 x 4x 1 x 3, x R 3.Săsescrie forma biliniară f (x, y) din care provine şi să se afle o bază canonică pentru f (x, y). Indicaţie. Punând f (x, y) =5x 1 y 1 +6x y +4x 3 y 3 (x 1 y + x y 1 ) (x 1 y 3 + x 3 y 1 ), obţinem f (x, x) =5x 1 +6x +4x 3 4x 1 x 4x 1 x 3 = f (x), x R 3. Dacăinterpretăm numerele x i, y i, i = 1, 3 drept coordonatele vectorilor x şi y în baza standard din R 3, matricea formei biliniare f (deci şi a formei pătratice f)în aceastăbază, este A = şi are minorii principali 1 =5, =6, 3 =80. Notând baza standard e (1), e (), e (3)ª,căutăm vectorii bazei canonice în forma v (1) = α 11 e (1) v () = α 1 e (1) + α e () v (3) = α 31 e (1) + α 3 e () + α 33 e (3) şi îi determinăm impunând condiţiile f v (1), e (1) =1, f v (), e (1) =0, f v (), e () =1, f v (3), e (1) =0, f v (3), e () =0, f v (3), e (3) =1. Se găsesc valorile α 11 = 1 5, α 1 = 1 13, α = 5 6, α 31 = 3 0, α 3 = 1 0 şi α 33 = Deci vectorii bazei canonice, pentru care avem f v (i), v (j) =0 dacă i 6= j şi f v (i), v (i) = α ii = i 1, i = 1, 3( 0 =1)sunt i
185 186 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII v (1) =, v () = 6, v (3) = 0 0 P Scriind x = 3 P ξ i v (i) şi y = 3 η j v (j),avem i=1 j=1 3X f (x, y) = i= i 1 i ξ i η i = 1 5 ξ 1η ξ η ξ 3η 3 şi deci f (x) = f (x, x) = 1 5 ξ ξ ξ 3, x R 3. Trecerea de la baza standard la baza canonică sefaceprinschimbarea de coordonate x 1 = 1 5 ξ ξ ξ 3 5 x = 6 ξ ξ. 13 x 3 = 40 ξ 3 Exerciţiul.66 Fie A o matrice µ nesingulară de ordinul doi şi αa βa B = γa δa în careα, β, γ, δ sunt constante şi αδ βγ 6= 0. Să se arate că B este nesingulară şi să se expliciteze B 1. Indicaţie. Presupunând că detb µ 6= 0,căutăm B 1 înforma αa 1 βa C = 1 γa 1 δa 1 cu α 1, β 1, γ 1, δ 1 constante, ce trebuie determinate. Vom impune condiţia BC = I 4 (matricea unitate de ordinul patru) şi vom nota cu I matricea unitate de ordinul doi. µ Conform cu exerciţiul precedent, vom găsi (αα1 + βγ BC = 1 )I (αβ 1 + βδ 1 )I, (γα 1 + δγ 1 )I (γδ 1 + δδ 1 )I iar sistemele pentru ( găsirea necunoscutelor ( sunt αα1 + βγ 1 =1 αβ1 + βδ 1 =0 şi γα 1 + δγ 1 =0 γβ 1 + δδ 1 =1. Notând d = αδ βγ 6= 0, vom obţine α 1 = δ d, β 1 = γ d, β 1 = β d, δ 1 = α d şi BC = I 4.DeciB 1 există şi avem B 1 = 1 µ δa 1 βa 1 d γa 1 αa 1.
186 .10. EXERCIŢII PROPUSE 187 Exerciţiul.67 Să se calculeze det B, undeb este matricea - bloc din problema precedentă. Indicaţie. Avem de calculat det B = αa βa γa δa. Presupunem pentru moment că α 6= 0şi înmulţim primele două coloane cu factorul β,pecarelescădem apoi din ultimele două coloane (prima din α atrei,adouadinapatra).obţinem αa 0 det B = γa (δ βγ α )A unde 0 este matricea nulă de ordinul doi. Apoi, înmulţim primele două linii cu γ şi le scădem din ultimele două linii, obţinem α αa 0 µ det B = 0 (δ βγ α )A = α δ βγ A 0 α 0 A şi în final det B =(αδ βγ) (det A).Dacăα =0,formularămâne valabilă, făcând aici α 0. Exerciţiul.68 Se consideră spaţiul vectorial V al funcţiilor f : R R, de forma f (t) =a 0 + a 1 cos t + b 1 sin t + a cos t + b sin t, a 1,a,b 1,b R. Să se arate că {1, cos t, sin t, cos t, sin t} formează obazăîn ³ V şi să se afle matricea aplicaţiei liniare ϕ : V V, ϕ(f) =g, g (t) =f t + π, în 4 această bază. Indicaţie. Cei5vectorisuntliniarindependenţi, căci din c 0 + c 1 cos t + c sin t + c 3 cos t + c4sint 0 rezultă maiîntâi c i =0,i = 1, 4. În adevăr, înmulţind această identitate Rπ cu cos t şi integrând pe [0, π], obţinem c 1 cos tdt = 0, deci c 1 = 0. Înmulţind cu sin t şi integrând pe [0, π], găsim c =0,etc. şi în finalavem şi c 0 = 0. Dimensiunea spaţiului V este 5, căci oricare 6 vectori sunt liniar dependenţi, deci cei 5 vectori formează o bază în V. Avem 0,
187 188 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII ³ ϕ (1) = 1, ϕ(cos t) =cos t + π = 1 cos t 1 sin t, 4 ³ ϕ (sin t) =sin t + π = 1 cos t + 1 sin t, 4 ³ ϕ (cos t) =cos t + π = sin t, ³ ϕ (sin t) =sin t + π =cost, deci matricea transformării ϕ, în baza dată, este A = şi se vede că det A = 1, deci transformarea este nedegenerată. Exerciţiul.69 În R4 se iau vectorii v (1) = 3 1 1, v () = Să seafle,în baza standard, matricea proiecţiei ortogonale pe subspaţiul generat de v (1) şi v (). Indicaţie. Proiecţia ortogonală a unui vector oarecare x R 4 pe subspaţiul generat de v (1) şi v () este un vector din acest subspaţiu, deci de forma c 1 v (1) + c v (), cu proprietatea că x c 1 v (1) + c v () este ortogonal pe vectorii v (1) şi v () (adică peîntreg subspaţiul generat de aceşti doi vectori). Anulând respectivele produse scalare, găsim sistemul ( c1 v (1), v (1) + c v (1), v () = x, v (1) c 1 v (1), v () + c v (), v () = x, v (). Deoarece v (1), v (1) =15, v (1), v () =15, v (), v () =30, x, v (1) =3x 1 +x x 3 + x 4, x, v () =x 1 +5x x 4, se găseşte că 15c 1 =4x 1 x x 3 +3x 4, 15c = x 1 +3x + x 3 x 4.
188 .10. EXERCIŢII PROPUSE 189 Proiecţia ortogonală căutată, notată ϕ (x), este dată de vectorul ϕ (x) =c 1 v (1) + c v () = = 1 (4x1 x x 3 +3x 4 ) v (1) +( x 1 +3x + x 3 x 4 ) v () = 15 = 1 15 ( 10x 1 +3x 4x 3 +5x 4 3x 1 +13x + x 3 4x 4 4x 1 + x +x 3 3x 4 5x 1 4x 3x 3 +5x 4 ) Proiecţiile vectorilor bazei standard (numite şi baza canonică) sunt ϕ e (1) = 1 15 (10, 3, 4, 5) = 3 e(1) e() 4 15 e(3) e(4) ϕ e () = 1 15 (3, 13, 1, 4) = 1 5 e(1) e() e(3) 4 15 e(4) ϕ e (3) = 1 15 ( 4, 1,, 3) = 4 15 e(1) e() + 15 e(3) 1 5 e(4) ϕ e (4) = 1 15 (5, 4, 3, 5) = 1 3 e(1) 4 15 e() 1 5 e(3) e(4) iar matricea transformării ϕ se poate scrie imediat. Exerciţiul.70 Fie e (1), e (), e (3)ª obază ortonormată în E 3 şi să presupunem căîn bazaformată din vectorii v (1) = e (1) +e () + e (3), v () = e (1) + e () +e (3), v (3) = e (1) + e () aplicaţia liniară ϕ are matricea B = Să se afle matricea transformării adjuncte ϕ,în aceeaşi bază. Indicaţie. Transformarea adjunctă se defineşte prin condiţia hϕ (x), yi hx,ϕ (y)i, x, y E 3. În baze ortonormate, dacă ϕ are matricea A, adjuncta ϕ are matricea A T. Deci este preferabil să lucrăm în baza e (1), e (), e (3)ª.Vomavea. ϕ v (1) = v (1) +v (3) =3e (1) +4e () + e (3) ϕ v () = v (1) +5v () +7v (3) =13e (1) +14e () +11e (3) ϕ. v (3) =3v (1) v () 3v (3) = e (1) +e () + e (3)
189 190 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Pe de altă parte, avem ϕ v (1) = ϕ e (1) +ϕ e () + ϕ e (3) ϕ v () = ϕ e (1) + ϕ e () +ϕ e (3) ϕ v (3) = ϕ e (1) + ϕ. e () Scriind ϕ e (3) = ϕ v () ϕ v (3), ϕ e () ϕ e (3) = ϕ v (1) ϕ v (), ϕ e (1) = ϕ v (3) ϕ e (),vomobţine ϕ e (1) =e (1) +6e () +6e (3) ϕ e () = 3e (1) 4e () 5e (3) ϕ. e (3) =7e (1) +6e () +5e (3) Deci, înbaza e (1), e (), e (3)ª, transformarea ϕ va avea ca matrice transpusa matricei lui ϕ, adică matricea 6 6 A = Trecerea de la baza e (1), e (), e (3)ª la baza v (1), v (), v (3)ª se face prin matricea schimbării de bază C = , 1 0 prin urmare matricea lui ϕ în noua bază vafi B = C 1 A C. Exerciţiul.71 Fie V spaţiul funcţiilor continue pe [0, π], cu valori reale. Definim aplicaţia T : V V, prin condiţia Tf = g g (x) = Z π 0 (1 + cos (x t)) f (t) dt. Să se afle nucleul aplicaţiei T, valorile proprii şi vectorii proprii corespunzători. Indicaţie. Nucleul aplicaţiei constă dintoţi vectorii f = f (t), pentru care Tf = 0(funcţia identic nulă). Deoarece Tf = 0 este echivalentă cu Z π 0 f (t) dt =0, Z π 0 f (t)costdt=0, Z π 0 f (t)sintdt=0
190 .10. EXERCIŢII PROPUSE 191 rezultă căfuncţiile care satisfac aceste condiţii, formează nucleul aplicaţiei T. Acestefuncţii, cu excepţia funcţiei identic nule, sunt în acelaşi timp şi vectorii proprii, corespunzători autovalorii λ = 0. Unexempludeastfel P de funcţiisuntceledeformaf (t) = n (a k cos kt + b k sin kt)în careexistă k=3 măcar un coeficient diferit de 0. Numărul natural n este arbitrar. Dacă λ 6= 0, din condiţia Tf = λf deducem că λf este de forma λf (x) = a 0 + a 1 cos x + a sin x, adică f (x) =c 0 + c 1 cos x + c sin x în mod obligator, constantele c 0, c 1, c şi λ trebuind să fie determinate. Se ajunge la condiţia echivalentă πc 0 + πc 1 cos x + πc sin x λ (c 0 + c 1 cos x + c sin x) din care rezultă (λ π) c 0 =0,(λ π) c 1 =0,(λ π) c = 0. Autovalorii λ = π îi corespund funcţiile proprii f (t) =c 1 cos t + c sin t (în caremăcar un coeficient este diferit de 0). Autovalorii λ = π îi corespund funcţiile proprii constante f (t) =c 0 6=0. Exerciţiul.7 În spaţiul vectorial R 3 se consideră subspaţiile liniare S 1 şi S, date de ecuaţiile S 1 : x + y z =0, S :3x 4y z =0. (a) Să se arate că aplicaţia f : v u+ v u u u v u+v este un izomorfism între S 1 şi S. (b) Să se afle locul geometric al mijloacelor segmentelor care unesc punctele lui S 1, cu imaginile lor prin transformarea f, dins. (c) Să se determine acele izomorfisme liniare ϕ : R 3 R 3,carecoincid cu f pe subspaţiul S 1. Indicaţie. (a) Oricepunct(vector)dinS 1 poate fi scris în modunicîn forma ( v, u + v, u)şi orice punct din S poate fi scris în modunicîn forma u u v u+v. Aplicaţia f : S1 S este injectivă şi surjectivă. Dacă notăm s = v 1 u 1 + v 1 u 1 şi t = v u + v u,avem f (s + t) =f (s)+f (t), s, t S 1 şi f (cs) =cf (s), c R şi s S 1. (b) Coordonatele mijlocului segmentului (în spaţiu) care uneşte punctele v v u+ v u şi u u v u+v sunt z = u, y = u, z = u+v şi ele satisfac ecuaţia x 3y + z =0,careesteecuaţia unui plan ce trece prin origine. Acesta este locul geometric căutat.
191 19 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII (c) Dacă ϕ : x y z x 0 y 0 z 0 este un izomorfism liniar în R 3,elestedeforma x 0 = a 1 x + a y + a 3 z y 0 = b 1 x + b y + b 3 z z 0 = c 1 x + c y + c 3 z în care determinantul coeficienţilor este 6= 0. Impunând condiţia că ϕ coincide cu f pe subspaţiul liniar S 1,găsim a 1 v + a (u + v)+a 3 u u b 1 v + b (u + v)+b 3 u u v. c 1 v + c (u + v)+c 3 u u +v Din prima identitate, avem a + a 3 =şi a a 1 =0. Dacănotăm a 1 = a, vomaveaa = a şi a 3 = a. Din celelalte două identităţi, găsim b 1 = b, b = b 1, b 3 = b şi respectiv c 1 = c, c = c +,c 3 = (c +1). Izomorfismele căutate sunt de forma x 0 = ax + ay +( a) z y 0 = bx +(b 1) y +( b) z z 0 = cx +(c +)y (c +1)z în care constantele satisfac condiţia 3a +4b +c 6= 0. Exerciţiul.73 În R 3 se consideră transformarea liniară (pentru a real, fixat): f a :(x, y, z) µx, ax + y, a x + ay + z. (a) Se cere matricea M a aluif a înbazastandardşi structura mulţimii {M a ; a R}. Să se studieze convergenţa şi să seafle(dacăexistă) limita şirului {S n },în care S n = I + 1 1! M a + 1! M a n! M n a. (b) Săseaflevalorileşi vectorii proprii pentru M a. Indicaţie. (a) Notăm e (1) = 1 0 1, e () = 0 1 0, e (3) = şi avem f µ a e (1) = 1 a a = e (1) + ae () + a e(3) f a e () = 0 1 a = e () + ae (3) f a e (3) = = e (3)
192 .10. EXERCIŢII PROPUSE 193 de unde rezultă M a = a 1 0 a a 1 Se constată că M a M b = M b M a = M a+b, matricea unitate I face parte din mulţimea considerată (seobţine pentru a = 0), fiecare element M a are invers (la operaţia de înmulţire a matricelor) şi anume Ma 1 = M a. Deci mulţimea considerată esteungrupcomutativfaţădeoperaţia internă de înmulţire. Se observă căavem Ma n = na 1 0,n=1,, 3,... (na) na 1 şi scriind găsim. S n = u n 0 0 v n u n 0, w n v n u n u n =1+ 1 1! + 1! n! e v n = a 1! + a! w n = a + + na n! ae (σ n 1 + σ n ) a e P unde σ n este suma parţială aseriei1+ 1 = e. Pentru a găsi expresia n=1 n! P lui w n = n 1 (ka),considerăm suma k=1 k! nx 1 (kx) s n (x) = k! k=1 pe care o calculăm cu ajutorul derivatei sale nx s 0 k nx n (x) =x k! = x k (k 1)! = x 1+ 1! + 3! + + n = (n 1)! k=1 k=1 µ = x µ 1 + 1! 1! + 1 µ 1 + +! (k )! (k 1)! µ (n )! + 1 = x (σ n 1 + σ n ). (n 1)!
193 194 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Rezultă s n (x) = x (σ n 1 + σ n )şi w n = s n (a) = a (σ n 1 + σ n ) a e.amarătat că lim S n = e 0 0 ae e 0. n a e ae e (b) Pentru a 6= 0,M a are polinomul caracteristic (λ 1) 3 şi deci singura autovaloare (triplă) este λ = 1, căreia îi corespunde un singur vector propriu, dacă facem abstracţie de factorul de proporţionalitate, anume v = Pentrua =0,M 0 = I = matricea unitate de ordinul trei. Avem o singură autovaloare, λ =1şi orice vector nenul din R 3 este vector propriu pentru I. Exerciţiul.74 Fie µ a cos θ b sin a sin θ + b cos θ M = a sin θ + b cos θ a cos θ + b sin θ în carea, b şi θ sunt numere reale date. (a) SăseafleM n,scriindm = aa + bb. (b) Săseafle(dacăexistă) lim n nx k=1 ( 1) k 1 M k k. Indicaţie. (a) Severificăimediatcădacă µ µ cos θ sin θ sin θ cos θ A =, B = sin θ cos θ cos θ sin θ avem A = B = I şi AB + BA = 0. Găsim M =(a + b ) I, M 3 = (a + b ) M şi în general M n =(a + b ) n I, M n+1 =(a + b ) M, oricare ar fi n natural. Putem scrie, folosind notaţia a + b = α, np k=1 ( 1) k 1 M µm k k = + M M 5 n 1 M + + µ 5 n 1 M + M 4 n M + + = 4 n = µ1+ α 3 + α4 αn + + M µ 5 n 1 α + α4 αn + + I. 4 n
194 .10. EXERCIŢII PROPUSE 195 Pentru α < 1, ambele sume parţiale din formula precedentă suntconvergente. Dacă punem X α n s = n 1, σ = X α n n n=1 n=1 rezultă căexistă lim n nx k=1 ( 1) k 1 M k k = sm σi. Exerciţiul.75 Dacă A este o matrice reală antisimetrică, să se arate că det A 0. Indicaţie. Dacă A este de ordin impar, rezultă deta = 0. Dacă este de ordin par şi admite λ = 0 ca autovaloare, det A =0. Dacă A este de ordin par şi are toate autovalorile 6= 0,rezultăcădetA este un produs de factori pozitivi, deci det A > 0. Definiţia.0 Dacă A este o matrice pătrată, cu elemente reale sau complexe, matricea A = Ā T (conjugată şi transpusă) se numeşte adjuncta matricei A. Dacă A = A,matriceaA se numeşte autoadjunctă. Matricele reale simetrice sunt caz particular de matrice autoadjuncte. Exerciţiul.76 Să se arate că autovalorile unei matrice autoadjuncte sunt reale. Indicaţie. Fie Av = λv, cuv 6= θ (elementul nul din C n, spaţiul vectorial al matricelor reale sau complexe, de tipul n 1). Avem evident v T A T = λv şi deci v T Ā T = λv T,adică v T A = λv T.Din ( v T Av = λv T v v T Av = λv T v λ λ v T v =0. Dacă v =(ξ 1,ξ,...,ξ n ) T,rezultă v = ξ1, ξ,..., ξ n T şi deci v T v = ξ 1 + ξ + + ξ n > 0, ceea ce va implica λ λ =0 λ R. Exerciţiul.77 Dacă A este o matrice autoadjunctă şi Au = λu, Av = µv cu λ 6= µ, să se arate că hu, vi =0.
195 196 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Indicaţie. Au = λu v T Au = λv T u. Pedealtă parte, Av = µv Āv = µv v T Ā T = µv T v T A = µv T v T Au = µv T u. Din (λ µ) v T u =0 v T u = hu, vi =0. Dacă u şi v sunt nenuli, putem spune că la autovalori diferite corespund vectori proprii ortogonali. Exerciţiul.78 Notăm det (λi A) =λ n + p 1 λ n p n 1 λ + p n şi presupunem p n 6=0. Săseexprimedet(λI A 1 ), în funcţiedecoeficienţii p i, i = 1,n. Indicaţie. Avem det (λi A 1 )=deta 1 (λa I) = ( 1)n det (λa I) = µ p n = λn 1 det p n λ I A = λn 1 p n λ + p 1 n λ + + p n 1 n 1 λ + p n = = λ n + p n 1 λ n p 1 λ + 1. p n p n p n Exerciţiul.79 În spaţiul vectorial R 4 se dau vectorii a (1) = 1 0 1, a () = 1 3, a (3) = Notând L subspaţiul general de aceşti vectori, să seafleobază a complementului ortogonal L. Indicaţie. Cei trei vectori nu sunt liniar independenţi, căci a (3) = a (1) + a (). L este subspaţiul generat de a (1) şi a (3),adicăconstădintoţi vectorii de forma c 1 a (1) + c a (3). Trebuie săgăsim doi vectori liniar independenţi b (1) şi b (), fiecare fiind ortogonal pe a (1) şi a (3).Scriindb =(α 1,α,α 3,α 4 ), obţinem sistemul ( α1 +α 3 + α 4 =0 α α 3 + α 4 =0 pentru care găsim perechea de vectori b (1) = şi b () = , care formează obazăîn L.Evident,înL există şi alte baze, căci sistemul din care le aflăm admite o infinitate de soluţii. Exerciţiul.80 Într-un spaţiu euclidian E cu 4 dimensiuni, raportat la baza ortonormată e (1), e (), e (3), e (4)ª,seconsiderăsubspaţiul L format de vectorii x, alecăror coordonate satisfac sistemul ξ 1 + ξ +3ξ 3 ξ 4 =0 3ξ 1 +ξ ξ 4 =0. 3ξ 1 + ξ +9ξ 3 ξ 4 =0 Să se determine complementul ortogonal L, precum şi o bazăîn L.
196 .10. EXERCIŢII PROPUSE 197 Indicaţie. Dacă notăm v (1) =e (1) + e () +3e (3) e (4) v () =3e (1) +e () e (4) v (3) =3e (1) + e () +9e (3) e (4) condiţiile date pot fi scrise pe scurt înforma v (1), x = v (), x = v (3), x = 0, x L. Deoarece v (3) =3v (1) v (), condiţiile se reduc la douăşi anume v (1), x =0, v (), x =0, x L, cuv (1) şi v () liniar independenţi. Rezultă că L este subspaţiul generat de vectorii v (1) şi v (), care constituie chiar o bază v (1), v ()ª,în L. Exerciţiul.81 Fie u 6= θ un vector fixat în spaţiul euclidian real X şi fie f : X X, f (x) =x a hx, ui u (a constantă reală) o transformare liniară. (a) Săseaflea R, astfelîncât f să fie o transformare ortogonală şi să se arate că pentru valoarea a 0 6=0găsită, avem f f f f = {z } n ori ½ f, n = impar I, n = par Fie X = R 3, u =e (1) +e () + e (3), a = a 0 şi e (i),i= 1, 3 ª baza canonică (standard)în R 3. (b) Să se scrie matricea transformării liniare f în baza standard şi să se afle autovalorile şi vectorii săi proprii. Indicaţie. (a) Impunem condiţia hf (x),f(x)i = hx, xi, x X şi găsim a hx, ui (a hu, ui ) = 0 a =.Prinurmare,f este dată prin hu, ui hx, ui f (x) =x u, x X. hu, ui Rezultă (f f)(x) =f (f (x)) = f = x hx, ui hu, ui µ hx, ui x hu, ui u u hx, ui hu, ui µ u. hx, ui = f (x) hu, ui f (u) = hu, ui hu, ui u = x, x X ceea ce înseamnă f f = I = transformarea identicăîn X. Esteevidentcă aplicarea de un număr impar de ori a transformării f coincide cu f şi că aplicarea de un număr par de ori coincide cu transformarea identică.
197 198 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII (b) Pentru x = x 1 x x 3 şi u = 1,avemhx, ui =x1 + x + x 3 şi f (x) =x 1 e (1) + x e () + x 3 e (3) 9 (x 1 +x + x 3 ) e (1) +e () + e (3). Acum, vom căuta imaginile vectorilor e (1), e (), e (3) pentru a putea scrie matricea lui f în această bază f e (1) = 1 9 e(1) 8 9 e() 4 9 e(3) f e () = 8 9 e(1) e() 4 9 e(3). f e (3) = 4 9 e(1) 4 9 e() e(3) Matricea căutată este A = Polinomul caracteristic al matricei 9A este (λ 9) (λ + 9), deci A are autovalorile λ 1 = λ =1,λ 3 = 1. Fiind simetrică, admite o bază ortonormată în R 3,formată din vectori proprii. Exerciţiul.8 Fie E un spaţiu euclidian real, finit dimensional şi L un subspaţiu propriu al său. Să se arate echivalenţa y =pr L x y L şi kx yk kx zk, z L. Indicaţie. În fond, avem de demonstrat echivalenţa y L şi hx y, zi =0, z L y L şi kx yk kx zk, z L oricare ar fi x E. Presupunem că arelocprimaafirmaţie. Din egalitatea x z =(x y)+(y z) kx zk = k(x y)+(y z)k = = h(x y)+(y z), (x y)+(y z)i = = hx y, x yi + hy z, y zi +hx y, y zi = = kx yk + ky zk,
198 .10. EXERCIŢII PROPUSE 199 dacă ţinem seama că hx y, y zi =0,deoarecez 0 = y z L. Deci avem kx yk kx zk, z L, adicăprimaafirmaţie o implică peceade a doua. Reciproc, să presupunem acum că esteadevărată adouaafirmaţie din enunţ. Punând z = y+u în inegalitatea kx yk kx zk, vomputea scrie hx y, x yi h(x y) u, (x y) ui din care rezultă hx y, ui hu, ui, u L. Punând aici tu în locdeu (cu u =fixatşi t R), găsim o inegalitate de forma βt αt cu α = hu, ui > 0şi β = hx y, ui =constant. Rezultă cu necesitate β =0şi deci hx y, ui =0, u L, adicăare loc prima afirmaţie din enunţ. Prin urmare, echivalenţa din enunţ afost demonstrată. Exerciţiul.83 Fie ϕ o formă bililiniară simetrică definită în baza standard din R astfel: ϕ e (1), e (1) = ϕ e (), e () =0, ϕ e (1), e () =1. Fie F mulţimea transformărilor liniare f din R, cu proprietatea ϕ (f (x),f(y)) = ϕ (x, y), x, y R. Să se arate că F se descompune în douăclasef 1 şi F,astfelîncât det f =1, f F 1 şi det f = 1, f F. Indicaţie. În orice spaţiu vectorial şi în oricebază a sa, determinantul matricei unei transformări liniare f are aceeaşi valoare (det C 1 AC =deta), astfel că notaţia det f este justificată. Dacă notăm x =(x 1,x ), y =(y 1,y ) şi A =[a ij ], i, j =1, matricealuif în baza canonică, avem f (x) = (a 11 x 1 + a 1 x,a 1 x 1 + a x ). Deoarece ϕ (x, y) =x 1 y + x y 1,condiţia cerută sescrie (a 11 x 1 + a 1 x )(a 1 y 1 + a y )+(a 1 x 1 + a x )(a 11 y 1 + a 1 y ) x 1 y +x y 1. După identificarea coeficienţilor, se obţin ecuaţiile a 11 a 1 =0, a 1 a =0, a 11 a + a 1 a 1 =1, a 1 a 1 + a a 11 =1. Cazul I. Luăm a 11 = α 6= 0şi α 1 =0. Rezultă a = 1 α şi a 1 =0. Elementele f F 1 au matricea de forma µ α 0 A =, cu det A =1. 0 1/α
199 00 CAPITOLUL. COMPLETĂRI ŞI EXERCIŢII Cazul II. Luăm a 11 =0şi a 1 = β 6= 0. Rezultă a 1 = 1 β şi a =0. Elementele f F au matricea de forma µ 0 1/β A =, cu det A = 1. β 0 Exerciţiul.84 Presupunem căîntr-o bază oarecare din R 3,notată e (1), e (), e (3)ª, produsul scalar este dat de forma biliniară simetrică f (x, y) =x 1 y 1 +5x y +6x 3 y 3 +(x 1 y 3 + x 3 y 1 )+3(x y 3 + x 3 y ), oricare ar fi x, y R 3.Aplicaţialiniară ϕ are în aceastăbază matricea 0 1 A = Să seaflematriceaadjuncteiϕ în aceeaşi bază. Indicaţie. Forma biliniară simetrică f este pozitiv definită, astfel că punând hx, yi = f (x, y) am definit un produs scalar pe R 3. Matricea lui f în baza dată este B = aşa încât avem e (1), e (1) =1, e (1), e () =0, e (1), e (3) =, e (), e () =5, e (), e (3) =3, e (3), e (3) =1. De asemenea, avem formulele ϕ e (1) =e () +3e (3) ϕ e () = e (1) e (3) ϕ. e (3) = e (1) e () În relaţia ( ) hϕ (x), yi = hx,ϕ (y)i, punemy = e (1) şi lui x îi dăm pe rând valorile e (i), i = 1, 3, obţinând sistemul ϕ e (1), e (1) = e (1),ϕ e (1) ϕ e (), e (1) = e (),ϕ e (1) ϕ e (3), e (1) = e (3),ϕ. e (1)
200 Capitolul 3 Mathematica în algebră În acest capitol se ilustreaza modul în care se poate fi folosit pachetul de programe Mathematica pentru înţelegerea cursului de algebră liniară şi geometrie prezentat studenţilor de la facultatea de automatica şi calculatoare. Acest capitol poate fi utilizat ca un ghid pentru cei care vor să se iniţieze în utilizarea softului Mathematica. Sunt analizate cîteva aspecte care ţin de utilizarea acestui soft. Sunt prezentate exemple de probleme care pot fi abordate pentru a fi rezolvate direct cu ajutorul softului şi unele care nu pot fi rezolvate direct, prezentânduse metode de soluţionare a problemei. Studenţii pot folosi softul Mathematica pentru rezolvarea problemelor de matematică care apar în inginerie iar utilizarea softului este o metoda complementară şi nu substitutivă matematicii. Studiind diagrama utilizatorilor acestui soft prezentă pe situl acestui soft se constată că inginerii şi fizicienii reprezintă aproape jumătate din totalul utilizatorilor. Remarcăm faptul că inginerii utilizează mai mult acest soft decât matematicienii. O sesiune de lucru cu Mathematica este un dialog între utilizator şi sistemul de calcul. Forma grafică relativ uşoară de scriere a instrucţiunilor, comentarea unor exemple semnificative şi combinarea cu reprezentări grafice fac mai uşoară înţelegerea cursului. Mathematica poate poate fi utilizată şi pentru preluarea unor calcule numerice sau simbolice greu de efectuat cu mâna, ceea ce permite o înţelegere mai profundă a problemelor studiate. După ce programul a fost instalat, utilizarea lui începe prin tipărirea unei comenzi şi apoi evaluarea ei prin utilizarea tastelor Shift+Enter. Cinci reguli de bază în sintaxa Mathematicii: 01
201 0 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ 1. numele oricărei comenzi începe cu literă mare; dacă numele comenzii este format din două cuvinte, prima literă dinfiecare cuvânt este mare şi cuvintele sunt legate,. argumentele funcţiilor sunt scrise între paranteze pătrate [ ]; parantezelerotunde( ) sunt folosite pentru gruparea operaţiilor; vectorii şi matricele sunt scrise între acolade { }; parantezele pătrate duble [[ ]] sunt folosite pentru indexarea tabelelor, a matricelor. 3. înmulţirea este reprezentată prinspaţiu sau *; 4. puterea este reprezentată prinˆ; 5. dacă nus-aobţinut nici un rezultat sau un răspuns incorect atunci s-a introdus sau executat o comandă incorect. Mathematica conţine multe funcţii construite şi funcţii caresegăsesc în pachete care trebuie încărcate separat. Pachetele sunt încărcate prin comanda <<director numelepachetului unde director este locaţia numelepachetului. Introducând comanda <<director Master toate funcţiile conţinute în toate pachetele din director pot fi utilizate. µ a11 a Definirea matricilor. Definim matricea A = 1 cu ajutorul a 1 a comenzii unde a [1, 1] = a 11,a[1, ] = a 1,a[, 1] = a 1,a[, ] = a. Putem realiza scrierea clasică matriceală a matricei prin comanda: Oaltă modalitate de a genera o matrice este de a utiliza comanda Array, care produce acelaşi rezultat ca mai sus. Matricea identitate de ordin n se generează cucomandaidentitymatrix[n]. Definim un vector linie (v 1,v,v 3 )astfel:
202 03 Mathematica nu face distincţie între un vector linie şi un vector coloană. La fel putem defini un vector cu instrucţiunea Array. Extragerea elementelor unei matrici. Presupunem că am generat matricea Extragerea liniei a doua din matricea m se face astfel: iar extragerea elementului (1,) din matricea m se face cu ajutorul comenzii: Extragerea unei coloane dintr-o matrice se face cu ajutorul comenzii Transpose[matrice] care transpune matricea după care extrage din matricea transpusă linia dorităcarereprezintă de fapt coloana matricii. Pentru a extrage coloana a treia a matricei m procedăm astfel: sau, acelaşi rezultat, îl obţinem prin comanda: Exerciţiul 3.1 Să se realizeze cu ajutorul Mathematicii următoarele operaţii: a) să se defineacă matricea mb; b) să se extragă coloana a treia a matricii; c) sa se extragă elementul (3,) din matrice; d) să ae afişeze în forma clasică matricea.
203 04 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ Calcule cu matrici şi vectori. Mathematica execută toate operaţiile cu matrici: adunarea, înmulţirea cu un scalar, înmulţirea matricilor, transpunerea matricii. Inversarea matricei şi calculul determinantului matricii se pot executa dacă matricea este pătratică. Prezentăm mai jos generarea a două matrice şi calculul sumei celor două matrice şi, adăugând comanda TableForm, rezultatul este scris sub formă matriceală obişnuită. Inversa matricei sumă a celor două matrice se realizează cu astfel: Pachetul de programe LinearAlgebra MatrixManipulation poate fi folosit pentru: -adăugarea coloanelor unei matrice la coloanele altei matrice cu condiţia ca cele două matrice săaibă acelaşi număr de coloane. Se realizeazăfolosind instrucţiunea AppendColumns[m1,m] ;
204 05 -adăugarea liniilor unei matrice la liniile altei matrice cu condiţia ca cele două matricesăaibă acelaşi număr de linii. Se realizează folosind instrucţiunea AppendRows[m1, m]. Se poate forma astfel o matrice bloc cu alăturând liniile şi coloanele submatricelor. µ 1 5 Exerciţiul 3. Se dau matricele m1 =, m = 1, µ m3 =. Să seformezea)omatriceprinalăturarea coloanelor matricelor m1 şi m, b) o matrice prin alăturarea liniilor matricelor m1 şi m3, c) matricea bloc formată din matricele m1, m3, m şi completată cu zerouri.
205 06 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ Tot cu ajutorul comenzilor acestui pachet pot fi executate şi următoarele operaţii: extragerea primelor n linii din matrice cu ajutorul comenzii TakeRows[matr, n], extragerea ulimelor n linii din matricea matr, TakeRows[matr,m,n] extragerea din matricea matr a liniilor cu numerele de ordine de la m la n, m n. Aceleaşi operaţii se pot face şi asupra coloanelor cu ajutorul comenzii TakeColumns. Se poate extrage dintr-o matrice o submatrice specificând poziţia primului şi a al ultimului element din submatrice cu ajutorul comenzii TakeMatrix[matr, poz1,poz] sau cu ajutorul comenzii SubmMatrix[matr, poz, dim] în care se specifică poziţia primului elemment şi numărul de linii şi coloane care trebuie extrase pornind de la acesta (dim.este o pereche de numere naturale în care primul element are seminficaţia numărului de linii care trebuie extrase pornind de la elementul specificat prin poz, iar al doilea element reprezintă numărul de coloane care trebuie extrase). Exerciţiul 3.3 Se consideră matricea A = a) Să se formeze submatricea care este formată din elementele a 1,a 13, a 14,a 15,a,a 3,a 4,a 5,a 3,..., a 35,formatădintreiliniişi patru coloane. b) Să se formeze submatricea formată din două linii şi două coloaneşi carearepeprimapoziţie elementul a 1. c) Să sestabilească care din aceste două matrici sunt pătratice.
206 07 Exerciţiul 3.4 Să se calculeze valoarea determinantului D= Exerciţiul 3.5 Să serealizezecuajutorulmathematicii următoarele operaţii: a) să se genereze vectorii u = 1 0 T, v = T ; b) să se calculeze norma euclidiană a lui u, versorul vectorului u; c) să se calculeze produsul scalar dintre vectorii u şi v.
207 08 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ Determinarea soluţiilor sistemelor de ecuaţii. Pentru a rezolva sistemul liniar Ax = b, unde A este matricea coeficienţilor sistemului, b este vectorul termenilor liberi iar x vectorul necunoscutelor. Dacă matricea A este inversabilă, atunci soluţia va fi x = A 1 b. Exerciţiul 3.6 Să se rezolve sistemul: 3x y + z +5t = x y z 3t =4. x +5y + z t =8 x + y +z +10t = 0 Generăm matricea sistemului, apoi înmulţim inversa cu termenii liberi şi obţinem soluţia sistemului. O altă modalitate de rezolvare este cu ajutorul instrucţiunii Solve. Se poate rezolva un sistem liniar şi cu instrucţiunea LinearSolve care rezolvă de obicei mai repede sistemul decât Solve. Rezolvarea sistemului poate fi facută şi folosind pachetul de programe <<LinearAlgebra GaussianElimination. Sunt folosite comenzile LU-
208 09 Factor care realizează descompunerea LU a matricei sistemului, trecută în prima paranteză, iar în a doua paranteză sunt trecuţi pivoţii. Comanda LUSolve realizează rezolvarea sistemului folosind substituţia inversă. Substituţia inversă poate fi folosită pentru rezolvarea sistemelor care au aceeaşi matrice şi se modifică doar termenii liberi.. Rezolvarea unui sistem liniar se poate face şi cu metoda eliminării Gauss- Jordan. Cu această metodă pot fi rezolvate şi sistemele compatibile nedeterminate şi cele incompatibile. Exerciţiul 3.7 Să se rezolve sistemele: 3x y + z +5t = x y z 3t =4 a),b) x +5y + z t =8 x + y +z +11t = 0 folosind metoda eliminării Gauss-Jordan. Încazulprimuluisistem x y +z +3t =5 x 3y 4z +6t = 3x +4y + z 6t =5 x +y +3z 8t = 10
209 10 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ Soluţia sistemului x = t +6,y =t +4,z = 6t 10. Rezolvăm sistemul al doilea Observăm că sistemul este incompatibil deoarece ultima ecuaţie este 0x +0y +0z +0t =1. Sistemele rezolvate sunt cele din Exerciţiul.6 iar interpretarea rezultatelor este cea făcută la acel exerciţiu. Exerciţiul 3.8 Folosind teorema Cayley-Hamilton, să secalculezea 1 şi să se compare rezultatul cu cel obţinut folosind comanda de inversare a unei matrici pentru matricea A =
210 11 Exerciţiul 3.9 Să se rezolve sistemul omogen (reluarea Exerciţiului.7): x 3y z +t =0 x 4y +3z +4t =0. x y 9z t =0 3x 10y + z +8t =0 Rezolvăm sistemul cu metoda eliminării Gauss-Jordan. De aici observăm că obţinem un sistem echivalent sistemului dat format din ½ ecuaţiile: x =13z +4t y =4z +t deci vectorul soluţie va fi 13z +4t 4z +t z t = z t : Exerciţiul 3.10 Să serealizezecumathematica ortonormalizarea sistemului devectori (Exerciţiul 1.15.): v (1) =, v () = 3 5, v (3) = 0.
211 1 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ. Comenzile CharacteristicPolynomial[m,x] calculează polinomul caracteristic al matricei m, polinom în necunoscuta x, Eigenvalues[m] calculează valorile proprii ale matricei m, Eigenvectors[m] furnizează vectorii proprii ai matricei m, Eigensystem[m] furnizează o listă a valorilor proprii şi a vectorilor proprii corespunzători. Exerciţiul 3.11 Fie matricea A=
212 13 Să se calculeze polinomul caracteristic, vaorile proprii şi vectorii proprii corespunzători. Exerciţiul 3.1 Se consideră matricea (Exerciţiul 1.18.) 1 4 A =. 4 1 (a) Să searatecăîn R 3 există obazăformată din vectori proprii ai lui A. (b) Să seafle obazăortonormatăformată din vectori proprii ai matricei A. a) Calculăm valorile proprii şi vectorii proprii şi verificăm dacă vectorii proprii sunt liniar independenţi. Rezultatul comenzii este: prima paranteză conţine valorile propriui iar următorele paranteze conţin vectorii proprii. Verificăm dacă vectorii proprii sunt liniar independenţi, adică dacă formeazăobazăîn R 3. Pentru aceasta folosim comanda RowReduce[matrice] care metoda eliminării a lui Gauss-Jacobi. Dacă matricea este nesingulară
213 14 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ se obţine matricea unitate, ceea ce indică că vectorii care formează matricea sunt liniar independenţi. Dacă matricea este dreptunghiulară sau singulară atunci primele l coloane vor fi coloanele matricii unitate care se pot forma din matricea respectivă. b) Aplicăm procedeul de ortonormare Gram-Schmidt vectorilor proprii
214 15 Ortogonalizarea se poate face mult mai uşor folosind pachetul de programe LinearAlgebra Orthoogonalization. Dacă vectorii care trebuie ortonormalizaţi nu sunt liniar independenţi rezultatul este imprevizibil. Dacă dorim să otogonalizăm siatemul de vectori fără a-i normaliza se foloseşte comanda GramSchmidt[matrice, Normalized->False]. Exerciţiul 3.13 Se consideră formapătratică h (x) =x 1 +x x 3 +6x 1 x x 1 x 3 +x x 3. Să se determine forma canonică şi baza canonică. Generăm matricea formei pătratice, calculăm valorile proprii, vectorii proprii şi iî ortonormăm.
215 16 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ Exerciţiul 3.14 Să se ortonormeze sistemul de funcţii t, t, t 3 în C [0, 1] R în raportcuprodusulscalarhf,gi = 1 tf (t) g (t) dt şi în raport cu produsul 0 R scalar hf,gi 0 = 1 f (t) g (t) dt. 0 S-a realizat numai ortogonalizarea sistemului de vectori. Prin comanda de mai jos realizăm ortogonalizarea aceluiaşi sistem de vectori. Se realizează ortonormalizarea sistemului de vectori în raport cu produsul scalar h, i 0.. Folosind acelaşi pachet de programe se poate numai normaliza un vector:. Se mai poate calcula proiecţia unui vector pe alt vector folosind din acelaţi pachet comanda Projection[v1,v].
216 17 Pot fi aproximate valorile proprii şi vectorii proprii folosind în comanda care calculează valorile proprii şi vectorii proprii pentru matricea N[ma]. Exerciţiul 3.15 Fie matricea A = valorile proprii şi vectorii proprii corespunzători.. Să se aproximeze Exerciţiul 3.16 Fie matricea A = Să se determine o formă canonică Jordan şi o bază Jordan.
217 18 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ Exerciţiul 3.17 Fie matricea A = Să sedetermineformacanonică Jordan şi o bază Jordan. Prezentăm exemple de calcul al matricei exponenţiale. Reluăm Exerciţiile.56 şi.57. Exerciţiul 3.18 Fie matricele:
218 A = Să se calculeze e A. şi A = Pachetul Calculus VectorialAnalysis conţie comenzi cu ajutorul cărora se poate calcula produsul scalar, produsul vectorial, produsul mixt pentru vectorii din spaţiul tridimensional. Exerciţiul 3.19 Se consideră vectoriiv 1 =(1,, 1), v =( 1,, 0) şi v 3 =(, 0, 3). Să se calculeze hv 1, v i, v 1 v şi (v 1, v, v 3 ).
219 0 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ Pachete de programe care pot fi folosite pentru desenarea graficelor. Pentru a trasa graficele conicelor pe ecuaţii generale folosim pachetul <<Graphics ImplicitPlot şi comanda ImplicitPlot[equation,{x,xmin,xmax}] care desenează graficul curbei dată implicit prin equation pe intervalul xmin, xmax. Reluăm exreciţiile 1.35, 1.37 şi Desenăm graficele conicelor din aceste exerciţii.
220 1 Pachetul ContourPlot3D conţine comanda ContourPlot3D care poate fi utilizată pentru a desena suprafeţe. Desenăm în continuare un elipsoid, un hiperboloid cu o pânză şi un paraboloid hiperbolic.
221 CAPITOLUL 3. MATHEMATICA ÎN ALGEBRĂ
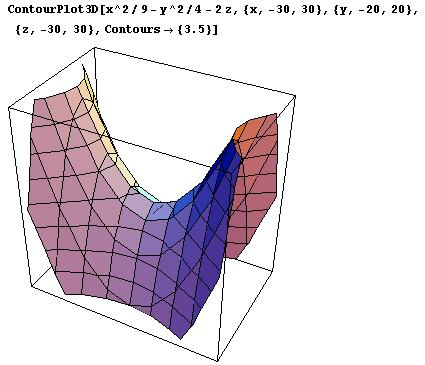
222 3
Matrice. Determinanti. Sisteme liniare
 Matrice 1 Matrice Adunarea matricelor Înmulţirea cu scalar. Produsul 2 Proprietăţi ale determinanţilor Rangul unei matrice 3 neomogene omogene Metoda lui Gauss (Metoda eliminării) Notiunea de matrice Matrice
Matrice 1 Matrice Adunarea matricelor Înmulţirea cu scalar. Produsul 2 Proprietăţi ale determinanţilor Rangul unei matrice 3 neomogene omogene Metoda lui Gauss (Metoda eliminării) Notiunea de matrice Matrice
Spatii liniare. Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară. Mulţime infinită liniar independentă
 liniară. Mulţime infinită liniar independentă") Noţiunea de spaţiu liniar 1 Noţiunea de spaţiu liniar Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară 2 Mulţime infinită liniar independentă 3 Schimbarea coordonatelor unui vector la o schimbare
Noţiunea de spaţiu liniar 1 Noţiunea de spaţiu liniar Exemple Subspaţiu liniar Acoperire (înfăşurătoare) liniară 2 Mulţime infinită liniar independentă 3 Schimbarea coordonatelor unui vector la o schimbare
2 Transformări liniare între spaţii finit dimensionale
 Transformări 1 Noţiunea de transformare liniară Proprietăţi. Operaţii Nucleul şi imagine Rangul şi defectul unei transformări 2 Matricea unei transformări Relaţia dintre rang şi defect Schimbarea matricei
Transformări 1 Noţiunea de transformare liniară Proprietăţi. Operaţii Nucleul şi imagine Rangul şi defectul unei transformări 2 Matricea unei transformări Relaţia dintre rang şi defect Schimbarea matricei
Sisteme diferenţiale liniare de ordinul 1
 1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
1 Metoda eliminării 2 Cazul valorilor proprii reale Cazul valorilor proprii nereale 3 Catedra de Matematică 2011 Forma generală a unui sistem liniar Considerăm sistemul y 1 (x) = a 11y 1 (x) + a 12 y 2
Curs 14 Funcţii implicite. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi"
 Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 14 Funcţii implicite Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie F : D R 2 R o funcţie de două variabile şi fie ecuaţia F (x, y) = 0. (1) Problemă În ce condiţii ecuaţia
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate.
 Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Curs 10 Funcţii reale de mai multe variabile reale. Limite şi continuitate. Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Fie p, q N. Fie funcţia f : D R p R q. Avem următoarele
Esalonul Redus pe Linii (ERL). Subspatii.
. Subspatii.") Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminarul 1 Esalonul Redus pe Linii (ERL). Subspatii. 1.1 Breviar teoretic 1.1.1 Esalonul Redus pe Linii (ERL) Definitia 1. O matrice A L R mxn este in forma de Esalon Redus pe Linii (ERL), daca indeplineste
Seminar 5 Analiza stabilității sistemelor liniare
 Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
Seminar 5 Analiza stabilității sistemelor liniare Noțiuni teoretice Criteriul Hurwitz de analiză a stabilității sistemelor liniare În cazul sistemelor liniare, stabilitatea este o condiție de localizare
1.3 Baza a unui spaţiu vectorial. Dimensiune
 .3 Baza a unui spaţiu vectorial. Dimensiune Definiţia.3. Se numeşte bază a spaţiului vectorial V o familie de vectori B care îndeplineşte condiţiile de mai jos: a) B este liniar independentă; b) B este
.3 Baza a unui spaţiu vectorial. Dimensiune Definiţia.3. Se numeşte bază a spaţiului vectorial V o familie de vectori B care îndeplineşte condiţiile de mai jos: a) B este liniar independentă; b) B este
Lucian Maticiuc CURS I II. 1 Matrice şi determinanţi. Sisteme de ecuaţii liniare. 1.1 Matrice şi determinanţi
 Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr Lucian MATICIUC http://mathettituiasiro/maticiuc/ CURS I II Matrice şi determinanţi Sisteme de ecuaţii
Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr Lucian MATICIUC http://mathettituiasiro/maticiuc/ CURS I II Matrice şi determinanţi Sisteme de ecuaţii
1. Sisteme de ecuaţii liniare Definiţia 1.1. Fie K un corp comutativ. 1) Prin sistem de m ecuaţii liniare cu n necunoscute X 1,...
 Prin sistem de m ecuaţii liniare cu n necunoscute X 1,...") 1. Sisteme de ecuaţii liniare Definiţia 1.1. Fie K un corp comutativ. 1) Prin sistem de m ecuaţii liniare cu n necunoscute X 1,..., X n şi coeficienţi în K se înţelege un ansamblu de egalităţi formale
1. Sisteme de ecuaţii liniare Definiţia 1.1. Fie K un corp comutativ. 1) Prin sistem de m ecuaţii liniare cu n necunoscute X 1,..., X n şi coeficienţi în K se înţelege un ansamblu de egalităţi formale
Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane
 Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
Subspatii ane Lectia VI Structura de spatiu an E 3. Dreapta si planul ca subspatii ane Oana Constantinescu Oana Constantinescu Lectia VI Subspatii ane Table of Contents 1 Structura de spatiu an E 3 2 Subspatii
Definiţia generală Cazul 1. Elipsa şi hiperbola Cercul Cazul 2. Parabola Reprezentari parametrice ale conicelor Tangente la conice
 1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
1 Conice pe ecuaţii reduse 2 Conice pe ecuaţii reduse Definiţie Numim conica locul geometric al punctelor din plan pentru care raportul distantelor la un punct fix F şi la o dreaptă fixă (D) este o constantă
Metode iterative pentru probleme neliniare - contractii
 Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Metode iterative pentru probleme neliniare - contractii Problemele neliniare sunt in general rezolvate prin metode iterative si analiza convergentei acestor metode este o problema importanta. 1 Contractii
Nicolae Cotfas ELEMENTE DE EDITURA UNIVERSITĂŢII DIN BUCUREŞTI
 Nicolae Cotfas ELEMENTE DE ALGEBRĂ LINIARĂ EDITURA UNIVERSITĂŢII DIN BUCUREŞTI Introducere Pe parcursul acestei cărţi ne propunem să prezentăm într-un mod cât mai accesibil noţiuni si rezultate de bază
Nicolae Cotfas ELEMENTE DE ALGEBRĂ LINIARĂ EDITURA UNIVERSITĂŢII DIN BUCUREŞTI Introducere Pe parcursul acestei cărţi ne propunem să prezentăm într-un mod cât mai accesibil noţiuni si rezultate de bază
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor X) functia f 1
 functia f 1") Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
Functii definitie proprietati grafic functii elementare A. Definitii proprietatile functiilor. Fiind date doua multimi X si Y spunem ca am definit o functie (aplicatie) pe X cu valori in Y daca fiecarui
(a) se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.
 se numeşte derivata parţială a funcţiei f în raport cu variabila x i în punctul a.") Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Definiţie Spunem că: i) funcţia f are derivată parţială în punctul a în raport cu variabila i dacă funcţia de o variabilă ( ) are derivată în punctul a în sens obişnuit (ca funcţie reală de o variabilă
Planul determinat de normală şi un punct Ecuaţia generală Plane paralele Unghi diedru Planul determinat de 3 puncte necoliniare
 1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
1 Planul în spaţiu Ecuaţia generală Plane paralele Unghi diedru 2 Ecuaţia generală Plane paralele Unghi diedru Fie reperul R(O, i, j, k ) în spaţiu. Numim normala a unui plan, un vector perpendicular pe
5. FUNCŢII IMPLICITE. EXTREME CONDIŢIONATE.
 5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
5 Eerciţii reolvate 5 UNCŢII IMPLICITE EXTREME CONDIŢIONATE Eerciţiul 5 Să se determine şi dacă () este o funcţie definită implicit de ecuaţia ( + ) ( + ) + Soluţie ie ( ) ( + ) ( + ) + ( )R Evident este
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor
 Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
Functii definitie, proprietati, grafic, functii elementare A. Definitii, proprietatile functiilor. Fiind date doua multimi si spunem ca am definit o functie (aplicatie) pe cu valori in daca fiecarui element
CURS 5 Spaţii liniare. Spaţiul liniar R n
 CURS 5 Spaţii liniare. Spaţiul liniar R n A. Arusoaie arusoaie.andreea@gmail.com andreea.arusoaie@info.uaic.ro Facultatea de Informatică, Universitatea Alexandru Ioan Cuza din Iaşi 30 Octombrie 2017 Structura
CURS 5 Spaţii liniare. Spaţiul liniar R n A. Arusoaie arusoaie.andreea@gmail.com andreea.arusoaie@info.uaic.ro Facultatea de Informatică, Universitatea Alexandru Ioan Cuza din Iaşi 30 Octombrie 2017 Structura
Curs 4 Serii de numere reale
 Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Curs 4 Serii de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Criteriul rădăcinii sau Criteriul lui Cauchy Teoremă (Criteriul rădăcinii) Fie x n o serie cu termeni
Gheorghe PROCOPIUC PROBLEME DE ALGEBRĂ LINIARĂ GEOMETRIE
 Gheorghe PROCOPIUC PROBLEME DE ALGEBRĂ LINIARĂ ŞI GEOMETRIE IAŞI, 005 CUPRINS 1 MATRICE ŞI SISTEME ALGEBRICE LINIARE 5 1.1 Matrice şi determinanţi.......................... 5 1. Sisteme de ecuaţii algebrice
Gheorghe PROCOPIUC PROBLEME DE ALGEBRĂ LINIARĂ ŞI GEOMETRIE IAŞI, 005 CUPRINS 1 MATRICE ŞI SISTEME ALGEBRICE LINIARE 5 1.1 Matrice şi determinanţi.......................... 5 1. Sisteme de ecuaţii algebrice
Spaţii vectoriale. Definiţia 1.1. Fie (K, +, ) un corp şi (V, +) un grup abelian.
 un corp şi (V, +) un grup abelian.") Spaţii vectoriale 1. Spaţii vectoriale. Definiţii şi proprietăţi de bază În continuare prin corp vom înţelege corp comutativ. Dacă nu se precizează altceva, se vor folosi notaţiile standard pentru elementele
Spaţii vectoriale 1. Spaţii vectoriale. Definiţii şi proprietăţi de bază În continuare prin corp vom înţelege corp comutativ. Dacă nu se precizează altceva, se vor folosi notaţiile standard pentru elementele
V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile
 Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Metode de Optimizare Curs V.7. Condiţii necesare de optimalitate cazul funcţiilor diferenţiabile Propoziţie 7. (Fritz-John). Fie X o submulţime deschisă a lui R n, f:x R o funcţie de clasă C şi ϕ = (ϕ,ϕ
Vectori liberi Produs scalar Produs vectorial Produsul mixt. 1 Vectori liberi. 2 Produs scalar. 3 Produs vectorial. 4 Produsul mixt.
 liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
liberi 1 liberi 2 3 4 Segment orientat liberi Fie S spaţiul geometric tridimensional cu axiomele lui Euclid. Orice pereche de puncte din S, notată (A, B) se numeşte segment orientat. Dacă A B, atunci direcţia
Seminar Algebra. det(a λi 3 ) = 0
 = 0") Rezolvari ale unor probleme propuse "Matematica const în a dovedi ceea ce este evident în cel mai puµin evident mod." George Polya P/Seminar Valori si vectori proprii : Solutie: ( ) a) A = Valorile proprii:
Rezolvari ale unor probleme propuse "Matematica const în a dovedi ceea ce este evident în cel mai puµin evident mod." George Polya P/Seminar Valori si vectori proprii : Solutie: ( ) a) A = Valorile proprii:
Asupra unei inegalităţi date la barajul OBMJ 2006
 Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
Asupra unei inegalităţi date la barajul OBMJ 006 Mircea Lascu şi Cezar Lupu La cel de-al cincilea baraj de Juniori din data de 0 mai 006 a fost dată următoarea inegalitate: Fie x, y, z trei numere reale
SEMINAR 14. Funcţii de mai multe variabile (continuare) ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0
 ( = 1 z(x,y) x = 0. x = f. x + f. y = f. = x. = 1 y. y = x ( y = = 0") Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
Facultatea de Hidrotehnică, Geodezie şi Ingineria Mediului Matematici Superioare, Semestrul I, Lector dr. Lucian MATICIUC SEMINAR 4 Funcţii de mai multe variabile continuare). Să se arate că funcţia z,
R R, f ( x) = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.
 = x 7x+ 6. Determinați distanța dintre punctele de. B=, unde x și y sunt numere reale.") 5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
5p Determinați primul termen al progresiei geometrice ( b n ) n, știind că b 5 = 48 și b 8 = 84 5p Se consideră funcția f : intersecție a graficului funcției f cu aa O R R, f ( ) = 7+ 6 Determinați distanța
Adriana-Ioana Lefter DIFERENŢIALE) Anul I, Facultatea de Chimie Note de curs
 Anul I, Facultatea de Chimie Note de curs") Adriana-Ioana Lefter MATEMATICĂ (ALGEBRĂ ŞI ECUAŢII DIFERENŢIALE) Anul I, Facultatea de Chimie Note de curs Cuprins Partea 1 ALGEBRĂ 1 Capitolul 1 Matrice şi determinanţi 3 11 Corpuri 3 12 Matrice 4 13
Adriana-Ioana Lefter MATEMATICĂ (ALGEBRĂ ŞI ECUAŢII DIFERENŢIALE) Anul I, Facultatea de Chimie Note de curs Cuprins Partea 1 ALGEBRĂ 1 Capitolul 1 Matrice şi determinanţi 3 11 Corpuri 3 12 Matrice 4 13
Curs 1 Şiruri de numere reale
 Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Bibliografie G. Chiorescu, Analiză matematică. Teorie şi probleme. Calcul diferenţial, Editura PIM, Iaşi, 2006. R. Luca-Tudorache, Analiză matematică, Editura Tehnopress, Iaşi, 2005. M. Nicolescu, N. Roşculeţ,
Matrici şi sisteme de ecuaţii liniare
 Matrici şi sisteme de ecuaţii liniare 1. Matrici şi determinanţi Reamintim aici câteva proprietăţi ale matricilor şi determinanţilor. Definiţia 1.1. Fie K un corp (comutativ) şi m, n N. O funcţie A : {1,...,
Matrici şi sisteme de ecuaţii liniare 1. Matrici şi determinanţi Reamintim aici câteva proprietăţi ale matricilor şi determinanţilor. Definiţia 1.1. Fie K un corp (comutativ) şi m, n N. O funcţie A : {1,...,
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE
 DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
DISTANŢA DINTRE DOUĂ DREPTE NECOPLANARE ABSTRACT. Materialul prezintă o modalitate de a afla distanţa dintre două drepte necoplanare folosind volumul tetraedrului. Lecţia se adresează clasei a VIII-a Data:
CURS XI XII SINTEZĂ. 1 Algebra vectorială a vectorilor liberi
 Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
Lect. dr. Facultatea de Electronică, Telecomunicaţii şi Tehnologia Informaţiei Algebră, Semestrul I, Lector dr. Lucian MATICIUC http://math.etti.tuiasi.ro/maticiuc/ CURS XI XII SINTEZĂ 1 Algebra vectorială
1.4 Schimbarea bazei unui spaţiu vectorial
 Algebră liniară, geometrie analitică şi diferenţială. Schimbarea bazei unui spaţiu vectorial După cum s-a văzut deja, într-un spaţiu vectorial V avem mai multe baze, iar un vector x V va avea câte un sistem
Algebră liniară, geometrie analitică şi diferenţială. Schimbarea bazei unui spaţiu vectorial După cum s-a văzut deja, într-un spaţiu vectorial V avem mai multe baze, iar un vector x V va avea câte un sistem
III. Serii absolut convergente. Serii semiconvergente. ii) semiconvergentă dacă este convergentă iar seria modulelor divergentă.
 semiconvergentă dacă este convergentă iar seria modulelor divergentă.") III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
III. Serii absolut convergente. Serii semiconvergente. Definiţie. O serie a n se numeşte: i) absolut convergentă dacă seria modulelor a n este convergentă; ii) semiconvergentă dacă este convergentă iar
Algebră liniară CAPITOLUL 3
 Algebră liniară CAPITOLUL 3 TRANSFORĂRI LINIARE 3.. Definiţia transformării liniare Definiţia 3... Fie V şi W două spaţii vectoriale peste un corp comutativ K. O funcţie u: V W se numeşte transformare
Algebră liniară CAPITOLUL 3 TRANSFORĂRI LINIARE 3.. Definiţia transformării liniare Definiţia 3... Fie V şi W două spaţii vectoriale peste un corp comutativ K. O funcţie u: V W se numeşte transformare
, m ecuańii, n necunoscute;
 Sisteme liniare NotaŃii: a ij coeficienńi, i necunoscute, b i termeni liberi, i0{1,,..., n}, j0{1,,..., m}; a11 1 + a1 +... + a1 nn = b1 a11 + a +... + an n = b (S), m ecuańii, n necunoscute;... am11 +
Sisteme liniare NotaŃii: a ij coeficienńi, i necunoscute, b i termeni liberi, i0{1,,..., n}, j0{1,,..., m}; a11 1 + a1 +... + a1 nn = b1 a11 + a +... + an n = b (S), m ecuańii, n necunoscute;... am11 +
2.9 Forme biafine Forme pătratice afine. Aducerea la forma canonică Centre de simetrie Varietăţi pătratice...
 Geometrie Afină Contents 1 Spaţii vectoriale 3 1.1 Spaţii vectoriale peste un corp K........................ 3 1.2 Exemple de spaţii vectoriale........................... 4 1.3 Dependenţă liniară de vectori..........................
Geometrie Afină Contents 1 Spaţii vectoriale 3 1.1 Spaţii vectoriale peste un corp K........................ 3 1.2 Exemple de spaţii vectoriale........................... 4 1.3 Dependenţă liniară de vectori..........................
Cursul de recuperare Algebra. v n. daca in schimb exista coecienti λ 1, λ 2,..., λ n nu toti nuli care satisfac relatia (1), de exemplu λ i 0 = A =
, de exemplu λ i 0 = A =") Matrice, determinanti Un punct de vedere liniar independent "A judeca matematic nu înseamn a gândi losoc, a judeca losoc nu înseamn a liber, a gândi liber nu înseamn a losof " Blaise Pascal Liniar independenta:
Matrice, determinanti Un punct de vedere liniar independent "A judeca matematic nu înseamn a gândi losoc, a judeca losoc nu înseamn a liber, a gândi liber nu înseamn a losof " Blaise Pascal Liniar independenta:
a n (ζ z 0 ) n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea
 n. n=1 se numeste partea principala iar seria a n (z z 0 ) n se numeste partea") Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Serii Laurent Definitie. Se numeste serie Laurent o serie de forma Seria n= (z z 0 ) n regulata (tayloriana) = (z z n= 0 ) + n se numeste partea principala iar seria se numeste partea Sa presupunem ca,
Algebră liniară CAPITOLUL 1
 Algebră liniară CAPITOLUL SPAŢII VECTORIALE FINIT DIMENSIONALE. Definiţia spaţiilor vectoriale Pentru a introduce noţiunea de spaţiu vectorial avem nevoie de noţiunea de corp comutativ de caracteristică
Algebră liniară CAPITOLUL SPAŢII VECTORIALE FINIT DIMENSIONALE. Definiţia spaţiilor vectoriale Pentru a introduce noţiunea de spaţiu vectorial avem nevoie de noţiunea de corp comutativ de caracteristică
Integrala nedefinită (primitive)
") nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
nedefinita nedefinită (primitive) nedefinita 2 nedefinita februarie 20 nedefinita.tabelul primitivelor Definiţia Fie f : J R, J R un interval. Funcţia F : J R se numeşte primitivă sau antiderivată a funcţiei
Curs 2 Şiruri de numere reale
 Curs 2 Şiruri de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Convergenţă şi mărginire Teoremă Orice şir convergent este mărginit. Demonstraţie Fie (x n ) n 0 un
Curs 2 Şiruri de numere reale Facultatea de Hidrotehnică Universitatea Tehnică "Gh. Asachi" Iaşi 2014 Convergenţă şi mărginire Teoremă Orice şir convergent este mărginit. Demonstraţie Fie (x n ) n 0 un
2.1 Sfera. (EGS) ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2
 ecuaţie care poartă denumirea de ecuaţia generală asferei. (EGS) reprezintă osferă cu centrul în punctul. 2 + p 2") .1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
.1 Sfera Definitia 1.1 Se numeşte sferă mulţimea tuturor punctelor din spaţiu pentru care distanţa la u punct fi numit centrul sferei este egalăcuunnumăr numit raza sferei. Fie centrul sferei C (a, b,
SERII NUMERICE. Definiţia 3.1. Fie (a n ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0
 n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0") SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
SERII NUMERICE Definiţia 3.1. Fie ( ) n n0 (n 0 IN) un şir de numere reale şi (s n ) n n0 şirul definit prin: s n0 = 0, s n0 +1 = 0 + 0 +1, s n0 +2 = 0 + 0 +1 + 0 +2,.......................................
Lucrare. Varianta aprilie I 1 Definiţi noţiunile de număr prim şi număr ireductibil. Soluţie. Vezi Curs 6 Definiţiile 1 şi 2. sau p b.
 Lucrare Soluţii 28 aprilie 2015 Varianta 1 I 1 Definiţi noţiunile de număr prim şi număr ireductibil. Soluţie. Vezi Curs 6 Definiţiile 1 şi 2 Definiţie. Numărul întreg p se numeşte număr prim dacă p 0,
Lucrare Soluţii 28 aprilie 2015 Varianta 1 I 1 Definiţi noţiunile de număr prim şi număr ireductibil. Soluţie. Vezi Curs 6 Definiţiile 1 şi 2 Definiţie. Numărul întreg p se numeşte număr prim dacă p 0,
Toate subiectele sunt obligatorii. Timpul de lucru efectiv este de 3 ore. Se acordă din oficiu 10 puncte. SUBIECTUL I.
 Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Modelul 4 Se acordă din oficiu puncte.. Fie numărul complex z = i. Calculaţi (z ) 25. 2. Dacă x şi x 2 sunt rădăcinile ecuaţiei x 2 9x+8 =, atunci să se calculeze x2 +x2 2 x x 2. 3. Rezolvaţi în mulţimea
Activitatea A5. Introducerea unor module specifice de pregătire a studenţilor în vederea asigurării de şanse egale
 Investeşte în oameni! FONDUL SOCIAL EUROPEAN Programul Operaţional Sectorial pentru Dezvoltarea Resurselor Umane 2007 2013 Axa prioritară nr. 1 Educaţiaşiformareaprofesionalăînsprijinulcreşteriieconomiceşidezvoltăriisocietăţiibazatepecunoaştere
Investeşte în oameni! FONDUL SOCIAL EUROPEAN Programul Operaţional Sectorial pentru Dezvoltarea Resurselor Umane 2007 2013 Axa prioritară nr. 1 Educaţiaşiformareaprofesionalăînsprijinulcreşteriieconomiceşidezvoltăriisocietăţiibazatepecunoaştere
CURS 11: ALGEBRĂ Spaţii liniare euclidiene. Produs scalar real. Spaţiu euclidian. Produs scalar complex. Spaţiu unitar. Noţiunea de normă.
 Sala: 2103 Decembrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 11: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Sala: 2103 Decembrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 11: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Sala: Octombrie 2014 SEMINAR 1: ALGEBRĂ. este un Q-spaţiu vectorial, faţă de operaţiile uzuale de adunare şi înmulţire cu un număr raţional.
 Sala: Octombrie 24 SEMINAR : ALGEBRĂ Conf univ dr: Dragoş-Pătru Covei Programul de studii: CE, IE, SPE Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat distribuit
Sala: Octombrie 24 SEMINAR : ALGEBRĂ Conf univ dr: Dragoş-Pătru Covei Programul de studii: CE, IE, SPE Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat distribuit
Principiul Inductiei Matematice.
 Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
Principiul Inductiei Matematice. Principiul inductiei matematice constituie un mijloc important de demonstratie in matematica a propozitiilor (afirmatiilor) ce depind de argument natural. Metoda inductiei
Cursul Măsuri reale. D.Rusu, Teoria măsurii şi integrala Lebesgue 15
 MĂSURI RELE Cursul 13 15 Măsuri reale Fie (,, µ) un spaţiu cu măsură completă şi f : R o funcţie -măsurabilă. Cum am văzut în Teorema 11.29, dacă f are integrală pe, atunci funcţia de mulţime ν : R, ν()
MĂSURI RELE Cursul 13 15 Măsuri reale Fie (,, µ) un spaţiu cu măsură completă şi f : R o funcţie -măsurabilă. Cum am văzut în Teorema 11.29, dacă f are integrală pe, atunci funcţia de mulţime ν : R, ν()
Capitolul 4. Integrale improprii Integrale cu limite de integrare infinite
 Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Capitolul 4 Integrale improprii 7-8 În cadrul studiului integrabilităţii iemann a unei funcţii s-au evidenţiat douăcondiţii esenţiale:. funcţia :[ ] este definită peintervalînchis şi mărginit (interval
Functii Breviar teoretic 8 ianuarie ianuarie 2011
 Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
Functii Breviar teoretic 8 ianuarie 011 15 ianuarie 011 I Fie I, interval si f : I 1) a) functia f este (strict) crescatoare pe I daca x, y I, x< y ( f( x) < f( y)), f( x) f( y) b) functia f este (strict)
Conice - Câteva proprietǎţi elementare
 Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Conice - Câteva proprietǎţi elementare lect.dr. Mihai Chiş Facultatea de Matematicǎ şi Informaticǎ Universitatea de Vest din Timişoara Viitori Olimpici ediţia a 5-a, etapa I, clasa a XII-a 1 Definiţii
Ecuatii exponentiale. Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. a x = b, (1)
") Ecuatii exponentiale Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. Cea mai simpla ecuatie exponentiala este de forma a x = b, () unde a >, a. Afirmatia.
Ecuatii exponentiale Ecuatia ce contine variabila necunoscuta la exponentul puterii se numeste ecuatie exponentiala. Cea mai simpla ecuatie exponentiala este de forma a x = b, () unde a >, a. Afirmatia.
Metode de interpolare bazate pe diferenţe divizate
 Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Metode de interpolare bazate pe diferenţe divizate Radu Trîmbiţaş 4 octombrie 2005 1 Forma Newton a polinomului de interpolare Lagrange Algoritmul nostru se bazează pe forma Newton a polinomului de interpolare
Sala: 2103 Octombrie 2014 CURS 1: ALGEBRĂ. Fie K corp comutativ cu elementul neutru la înmulţire notat prin 1 iar 0 la adunare.
 Sala: 2103 Octombrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 1: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Sala: 2103 Octombrie 2014 Conf. univ. dr.: Dragoş-Pătru Covei CURS 1: ALGEBRĂ Specializarea: C.E., I.E., S.P.E. Nota: Acest curs nu a fost supus unui proces riguros de recenzare pentru a fi oficial publicat.
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM 1 electronica.geniu.ro
 Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
Analiza în curent continuu a schemelor electronice Eugenie Posdărăscu - DCE SEM Seminar S ANALA ÎN CUENT CONTNUU A SCHEMELO ELECTONCE S. ntroducere Pentru a analiza în curent continuu o schemă electronică,
EDITURA PARALELA 45 MATEMATICĂ DE EXCELENŢĂ. Clasa a X-a Ediţia a II-a, revizuită. pentru concursuri, olimpiade şi centre de excelenţă
 Coordonatori DANA HEUBERGER NICOLAE MUŞUROIA Nicolae Muşuroia Gheorghe Boroica Vasile Pop Dana Heuberger Florin Bojor MATEMATICĂ DE EXCELENŢĂ pentru concursuri, olimpiade şi centre de excelenţă Clasa a
Coordonatori DANA HEUBERGER NICOLAE MUŞUROIA Nicolae Muşuroia Gheorghe Boroica Vasile Pop Dana Heuberger Florin Bojor MATEMATICĂ DE EXCELENŢĂ pentru concursuri, olimpiade şi centre de excelenţă Clasa a
Orice izometrie f : (X, d 1 ) (Y, d 2 ) este un homeomorfism. (Y = f(x)).
 (Y, d 2 ) este un homeomorfism. (Y = f(x)).") Teoremă. (Y = f(x)). Orice izometrie f : (X, d 1 ) (Y, d 2 ) este un homeomorfism Demonstraţie. f este continuă pe X: x 0 X, S Y (f(x 0 ), ε), S X (x 0, ε) aşa ca f(s X (x 0, ε)) = S Y (f(x 0 ), ε) : y
Teoremă. (Y = f(x)). Orice izometrie f : (X, d 1 ) (Y, d 2 ) este un homeomorfism Demonstraţie. f este continuă pe X: x 0 X, S Y (f(x 0 ), ε), S X (x 0, ε) aşa ca f(s X (x 0, ε)) = S Y (f(x 0 ), ε) : y
Contract POSDRU/86/1.2/S/ POSDRU ID * Bucureşti 2012
 Contract POSDRU/86/1.2/S/62485 Algebră Liniară POSDRU ID 62485 * Bucureşti 212 Prefaţă Algebra liniară şi geometria analitică stau la baza pregătirii matematice universitare, oferind modelări bazate pe
Contract POSDRU/86/1.2/S/62485 Algebră Liniară POSDRU ID 62485 * Bucureşti 212 Prefaţă Algebra liniară şi geometria analitică stau la baza pregătirii matematice universitare, oferind modelări bazate pe
Conice. Lect. dr. Constantin-Cosmin Todea. U.T. Cluj-Napoca
 Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Conice Lect. dr. Constantin-Cosmin Todea U.T. Cluj-Napoca Definiţie: Se numeşte curbă algebrică plană mulţimea punctelor din plan de ecuaţie implicită de forma (C) : F (x, y) = 0 în care funcţia F este
Ecuaţia generală Probleme de tangenţă Sfera prin 4 puncte necoplanare. Elipsoidul Hiperboloizi Paraboloizi Conul Cilindrul. 1 Sfera.
 pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
pe ecuaţii generale 1 Sfera Ecuaţia generală Probleme de tangenţă 2 pe ecuaţii generale Sfera pe ecuaţii generale Ecuaţia generală Probleme de tangenţă Numim sferă locul geometric al punctelor din spaţiu
ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE. Teorie şi probleme
 ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE DIFERENŢIALĂ. Teorie şi probleme Florian MUNTEANU Departamentul de Matematici Aplicate, Universitatea din Craiova Al. Cuza 3, 585 Craiova, Dolj, România
ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE DIFERENŢIALĂ. Teorie şi probleme Florian MUNTEANU Departamentul de Matematici Aplicate, Universitatea din Craiova Al. Cuza 3, 585 Craiova, Dolj, România
Concurs MATE-INFO UBB, 1 aprilie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ Concurs MATE-INFO UBB, aprilie 7 Proba scrisă la MATEMATICĂ SUBIECTUL I (3 puncte) ) (5 puncte) Fie matricele A = 3 4 9 8
Vladimir BALAN. Algebră Liniară, Geometrie Analitică, şi Elemente de Geometrie Diferenţială. Student Web Copy. = Bucureşti 2011 =
 Vladimir BALAN Algebră Liniară, Geometrie Analitică, şi Elemente de Geometrie Diferenţială = Bucureşti 2011 = Prefaţă Acest material include noţiunile, rezultatele teoretice de bază, precum şi probleme
Vladimir BALAN Algebră Liniară, Geometrie Analitică, şi Elemente de Geometrie Diferenţială = Bucureşti 2011 = Prefaţă Acest material include noţiunile, rezultatele teoretice de bază, precum şi probleme
COLEGIUL NATIONAL CONSTANTIN CARABELLA TARGOVISTE. CONCURSUL JUDETEAN DE MATEMATICA CEZAR IVANESCU Editia a VI-a 26 februarie 2005.
 SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
SUBIECTUL Editia a VI-a 6 februarie 005 CLASA a V-a Fie A = x N 005 x 007 si B = y N y 003 005 3 3 a) Specificati cel mai mic element al multimii A si cel mai mare element al multimii B. b)stabiliti care
elemente de geometrie euclidiană
 Universitatea de Vest din Timişoara Facultatea de Fizică Algebră liniară şi elemente de geometrie euclidiană Adrian NECULAE - Curs pentru uzul studenţilor - Timişoara - 2010 Tipografia Universităţii de
Universitatea de Vest din Timişoara Facultatea de Fizică Algebră liniară şi elemente de geometrie euclidiană Adrian NECULAE - Curs pentru uzul studenţilor - Timişoara - 2010 Tipografia Universităţii de
Seminariile Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reziduurilor
 Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Facultatea de Matematică Calcul Integral şi Elemente de Analiă Complexă, Semestrul I Lector dr. Lucian MATICIUC Seminariile 9 20 Capitolul X. Integrale Curbilinii: Serii Laurent şi Teorema Reiduurilor.
Ecuatii trigonometrice
 Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
Ecuatii trigonometrice Ecuatiile ce contin necunoscute sub semnul functiilor trigonometrice se numesc ecuatii trigonometrice. Cele mai simple ecuatii trigonometrice sunt ecuatiile de tipul sin x = a, cos
ELEMENTE DE GEOMETRIE. Dorel Fetcu
 ELEMENTE DE GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ Dorel Fetcu Acest curs este un fragment din manualul D. Fetcu, Elemente de algebră liniară, geometrie analitică şi geometrie diferenţială, Casa Editorială
ELEMENTE DE GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ Dorel Fetcu Acest curs este un fragment din manualul D. Fetcu, Elemente de algebră liniară, geometrie analitică şi geometrie diferenţială, Casa Editorială
Progresii aritmetice si geometrice. Progresia aritmetica.
 Progresii aritmetice si geometrice Progresia aritmetica. Definitia 1. Sirul numeric (a n ) n N se numeste progresie aritmetica, daca exista un numar real d, numit ratia progresia, astfel incat a n+1 a
Progresii aritmetice si geometrice Progresia aritmetica. Definitia 1. Sirul numeric (a n ) n N se numeste progresie aritmetica, daca exista un numar real d, numit ratia progresia, astfel incat a n+1 a
Lectia III Produsul scalar a doi vectori liberi
 Produsul scalar: denitie, proprietati Schimbari de repere ortonormate in plan Aplicatii Lectia III Produsul scalar a doi vectori liberi Oana Constantinescu Oana Constantinescu Lectia III Produsul scalar:
Produsul scalar: denitie, proprietati Schimbari de repere ortonormate in plan Aplicatii Lectia III Produsul scalar a doi vectori liberi Oana Constantinescu Oana Constantinescu Lectia III Produsul scalar:
OANA CONSTANTINESCU. ( a carei ecuatie matriceala este data in raport cu un reper cartezian R = {O; ē 1,, ē n }.
 ELEMENTE DE SIMETRIE ALE UNEI HIPERCUADRICE IN SPATII AFINE EUCLIDIENE OANA CONSTANTINESCU 1. Centru de simetrie pentru o hipercuadrica afina Pentru inceput cadrul de lucru este un spatiu an real de dimensiune
ELEMENTE DE SIMETRIE ALE UNEI HIPERCUADRICE IN SPATII AFINE EUCLIDIENE OANA CONSTANTINESCU 1. Centru de simetrie pentru o hipercuadrica afina Pentru inceput cadrul de lucru este un spatiu an real de dimensiune
CONCURS DE ADMITERE, 17 iulie 2017 Proba scrisă la MATEMATICĂ
 UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
UNIVERSITATEA BABEŞ-BOLYAI CLUJ-NAPOCA FACULTATEA DE MATEMATICĂ ŞI INFORMATICĂ CONCURS DE ADMITERE, 7 iulie 207 Proba scrisă la MATEMATICĂ SUBIECTUL I (30 puncte) ) (0 puncte) Să se arate că oricare ar
Capitolul 4 PROPRIETĂŢI TOPOLOGICE ŞI DE NUMĂRARE ALE LUI R. 4.1 Proprietăţi topologice ale lui R Puncte de acumulare
 Capitolul 4 PROPRIETĂŢI TOPOLOGICE ŞI DE NUMĂRARE ALE LUI R În cele ce urmează, vom studia unele proprietăţi ale mulţimilor din R. Astfel, vom caracteriza locul" unui punct în cadrul unei mulţimi (în limba
Capitolul 4 PROPRIETĂŢI TOPOLOGICE ŞI DE NUMĂRARE ALE LUI R În cele ce urmează, vom studia unele proprietăţi ale mulţimilor din R. Astfel, vom caracteriza locul" unui punct în cadrul unei mulţimi (în limba
SEMINAR TRANSFORMAREA FOURIER. 1. Probleme
 SEMINAR TRANSFORMAREA FOURIER. Probleme. Să se precizeze dacă funcţiile de mai jos sunt absolut integrabile pe R şi, în caz afirmativ să se calculeze { transformata Fourier., t a. σ(t), t < ; b. f(t) σ(t)
SEMINAR TRANSFORMAREA FOURIER. Probleme. Să se precizeze dacă funcţiile de mai jos sunt absolut integrabile pe R şi, în caz afirmativ să se calculeze { transformata Fourier., t a. σ(t), t < ; b. f(t) σ(t)
Ion CRĂCIUN CAPITOLE DE MATEMATICI SPECIALE EDITURA PIM
 Ion CRĂCIUN CAPITOLE DE MATEMATICI SPECIALE EDITURA PIM IAŞI 2007 2 Cuprins 1 Ecuaţii diferenţiale liniare de ordin superior 7 1.1 Ecuaţii diferenţiale liniare de ordinul n cu coeficienţi variabili 7 1.2
Ion CRĂCIUN CAPITOLE DE MATEMATICI SPECIALE EDITURA PIM IAŞI 2007 2 Cuprins 1 Ecuaţii diferenţiale liniare de ordin superior 7 1.1 Ecuaţii diferenţiale liniare de ordinul n cu coeficienţi variabili 7 1.2
Capitolul 3. Serii Fourier. a unei funcţii periodice de perioadă Dezvoltarea în serie Fourier
 Capitolul Serii Fourier 7-8. Dezvoltarea în serie Fourier a unei funcţii periodice de perioadă Pornind de la discuţia asupra coardei vibrante începută în anii 75 între Euler şi d Alembert, se ajunge la
Capitolul Serii Fourier 7-8. Dezvoltarea în serie Fourier a unei funcţii periodice de perioadă Pornind de la discuţia asupra coardei vibrante începută în anii 75 între Euler şi d Alembert, se ajunge la
1 Preliminarii. M 3, (a b) c = a (b c) (notăm a b c, obţinând astfel şi x 1 x 2... x n
 c = a (b c) (notăm a b c, obţinând astfel şi x 1 x 2... x n") 1 Preliminarii Fie M, A mulţimi nevide şi n N. Se muneşte operaţie n ară (sau lege de compoziţie n-ară) definită pe M orice aplicaţie τ : M n M (M n = } M {{... M } ). In cazul n = 2, obţinem operaţiile
1 Preliminarii Fie M, A mulţimi nevide şi n N. Se muneşte operaţie n ară (sau lege de compoziţie n-ară) definită pe M orice aplicaţie τ : M n M (M n = } M {{... M } ). In cazul n = 2, obţinem operaţiile
Sisteme de ecuaţii diferenţiale
 Curs 5 Sisteme de ecuaţii diferenţiale 5. Sisteme normale Definiţie 5.. Se numeşte sistem normal sistemul de ecuaţii diferenţiale de ordinul întâi dx dt = f (t, x, x 2,..., x n ) dx 2 dt = f 2(t, x, x
Curs 5 Sisteme de ecuaţii diferenţiale 5. Sisteme normale Definiţie 5.. Se numeşte sistem normal sistemul de ecuaţii diferenţiale de ordinul întâi dx dt = f (t, x, x 2,..., x n ) dx 2 dt = f 2(t, x, x
O generalizare a unei probleme de algebră dată la Olimpiada de Matematică, faza judeţeană, 2013
 O generalizare a unei probleme de algebră dată la Olimpiada de Matematică, faza judeţeană, 2013 Marius Tărnăuceanu 1 Aprilie 2013 Abstract În această lucrare vom prezenta un rezultat ce extinde Problema
O generalizare a unei probleme de algebră dată la Olimpiada de Matematică, faza judeţeană, 2013 Marius Tărnăuceanu 1 Aprilie 2013 Abstract În această lucrare vom prezenta un rezultat ce extinde Problema
INTERPOLARE. y i L i (x). L(x) = i=0
. L(x) = i=0") INTERPOLARE Se dau punctele P 0, P 1,..., P n in plan sau in spatiu, numite noduri si avand vectorii de pozitie r 0, r 1,..., r n. Problemă. Să se găsească o curbă (dintr-o anumită familie) care să treacă
INTERPOLARE Se dau punctele P 0, P 1,..., P n in plan sau in spatiu, numite noduri si avand vectorii de pozitie r 0, r 1,..., r n. Problemă. Să se găsească o curbă (dintr-o anumită familie) care să treacă
GEOMETRIE ANALITICĂ. Mihai-Sorin Stupariu
 GEOMETRIE ANALITICĂ Mihai-Sorin Stupariu Sem. al II-lea, 007-008 Cuprins 1 Elemente de algebră liniară 3 1.1 Spaţii vectoriale. Definiţie. Exemple................ 3 1. Combinaţii liniare. Baze şi repere..................
GEOMETRIE ANALITICĂ Mihai-Sorin Stupariu Sem. al II-lea, 007-008 Cuprins 1 Elemente de algebră liniară 3 1.1 Spaţii vectoriale. Definiţie. Exemple................ 3 1. Combinaţii liniare. Baze şi repere..................
z a + c 0 + c 1 (z a)
") 1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
1 Serii Laurent (continuare) Teorema 1.1 Fie D C un domeniu, a D şi f : D \ {a} C o funcţie olomorfă. Punctul a este pol multiplu de ordin p al lui f dacă şi numai dacă dezvoltarea în serie Laurent a funcţiei
Criptosisteme cu cheie publică III
 Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
Criptosisteme cu cheie publică III Anul II Aprilie 2017 Problema rucsacului ( knapsack problem ) Considerăm un număr natural V > 0 şi o mulţime finită de numere naturale pozitive {v 0, v 1,..., v k 1 }.
GEOMETRIE ANALITICĂ. Gheorghe MUNTEANU, Adelina MANEA
 GEOMETRIE ANALITICĂ Gheorghe MUNTEANU, Adelina MANEA 2 Cuprins Prefaţă 7 I Consideraţii teoretice 9 1 Spaţii vectoriale 11 1.1 Definiţie, exemple......................... 12 1.2 Subspaţii..............................
GEOMETRIE ANALITICĂ Gheorghe MUNTEANU, Adelina MANEA 2 Cuprins Prefaţă 7 I Consideraţii teoretice 9 1 Spaţii vectoriale 11 1.1 Definiţie, exemple......................... 12 1.2 Subspaţii..............................
III. Reprezentarea informaţiei în sistemele de calcul
 Metode Numerice Curs 3 III. Reprezentarea informaţiei în sistemele de calcul III.1. Reprezentarea internă a numerelor întregi III. 1.1. Reprezentarea internă a numerelor întregi fără semn (pozitive) Reprezentarea
Metode Numerice Curs 3 III. Reprezentarea informaţiei în sistemele de calcul III.1. Reprezentarea internă a numerelor întregi III. 1.1. Reprezentarea internă a numerelor întregi fără semn (pozitive) Reprezentarea
Funcţii Ciudate. Beniamin Bogoşel
 Funcţii Ciudate Beniamin Bogoşel Scopul acestui articol este construcţia unor funcţii neobişnuite din punct de vedere intuitiv, care au anumite proprietăţi interesante. Construcţia acestor funcţii se face
Funcţii Ciudate Beniamin Bogoşel Scopul acestui articol este construcţia unor funcţii neobişnuite din punct de vedere intuitiv, care au anumite proprietăţi interesante. Construcţia acestor funcţii se face
Aplicaţii ale principiului I al termodinamicii la gazul ideal
 Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Aplicaţii ale principiului I al termodinamicii la gazul ideal Principiul I al termodinamicii exprimă legea conservării şi energiei dintr-o formă în alta şi se exprimă prin relaţia: ΔUQ-L, unde: ΔU-variaţia
Criterii de comutativitate a grupurilor
 Criterii de comutativitate a grupurilor Marius Tărnăuceanu 10.03.2017 Abstract În această lucrare vom prezenta mai multe condiţii suficiente de comutativitate a grupurilor. MSC (2010): 20A05, 20K99. Key
Criterii de comutativitate a grupurilor Marius Tărnăuceanu 10.03.2017 Abstract În această lucrare vom prezenta mai multe condiţii suficiente de comutativitate a grupurilor. MSC (2010): 20A05, 20K99. Key
CAPITOLUL 2 VECTORI LIBERI. 2.1 Segment orientat. Vector liber
 Algebră liniară CAPITOLUL VECTORI LIBERI. Segment orientat. Vector liber Acest capitol este dedicat în totalitate studierii spaţiului vectorilor liberi, spaţiu cu foarte multe aplicaţii în geometrie, fizică
Algebră liniară CAPITOLUL VECTORI LIBERI. Segment orientat. Vector liber Acest capitol este dedicat în totalitate studierii spaţiului vectorilor liberi, spaţiu cu foarte multe aplicaţii în geometrie, fizică
Subiecte Clasa a VIII-a
 Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
Subiecte lasa a VIII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate pe foaia de raspuns in dreptul
CAPITOLUL 4 FUNCŢIONALE LINIARE, BILINIARE ŞI PĂTRATICE
 CAPITOLUL FUNCŢIONALE LINIAE BILINIAE ŞI PĂTATICE FUNCŢIONALE LINIAE BEIA TEOETIC Deiniţia Fie K X un spaţiu vecorial de dimensiune iniă O aplicaţie : X K se numeşe uncţională liniară dacă: ese adiivă
CAPITOLUL FUNCŢIONALE LINIAE BILINIAE ŞI PĂTATICE FUNCŢIONALE LINIAE BEIA TEOETIC Deiniţia Fie K X un spaţiu vecorial de dimensiune iniă O aplicaţie : X K se numeşe uncţională liniară dacă: ese adiivă
3. Vectori şi valori proprii
 Valori şi vectori proprii 7 Vectori şi valori proprii n Reamintim că dacă A este o matrice pătratică atunci un vector x R se numeşte vector propriu în raport cu A dacă x şi există un număr λ (real sau
Valori şi vectori proprii 7 Vectori şi valori proprii n Reamintim că dacă A este o matrice pătratică atunci un vector x R se numeşte vector propriu în raport cu A dacă x şi există un număr λ (real sau
PROBLEME DE VALORI ŞI VECTORI PROPRII
 9 PROBLEME DE VALORI ŞI VECTORI PROPRII 81 Introducere Problema de valori proprii a unui operator liniar A: Ax = λx x vector propriu, λ valoare proprie În reprezentarea unei baze din < n problemă matricială
9 PROBLEME DE VALORI ŞI VECTORI PROPRII 81 Introducere Problema de valori proprii a unui operator liniar A: Ax = λx x vector propriu, λ valoare proprie În reprezentarea unei baze din < n problemă matricială
Subiecte Clasa a VII-a
 lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate
lasa a VII Lumina Math Intrebari Subiecte lasa a VII-a (40 de intrebari) Puteti folosi spatiile goale ca ciorna. Nu este de ajuns sa alegeti raspunsul corect pe brosura de subiecte, ele trebuie completate