Mehanika dr.sc. Robert Beuc. Fizika Studij Fizioterapije
|
|
|
- Νικόστρατος Βλαστός
- 6 χρόνια πριν
- Προβολές:
Transcript

1 Mehanika dr.sc. Robert Beuc izika Studij izioterapije 1

2 Mehanika 2
3 Gibanje Jednoliko pravocrtno gibanje Jednoliko promjenljivo pravocrtno gibanje Slobodni pad Kružno gibanje Mirovanje s obzirom na pomicanje Uvjeti mirovanja s obzirom na rotaciju Sile na poluzi Sile na kosini Trenje Rad Snaga Energija Tlak 3
4 Mehanika proučava ponašanja tijela, te njihovo međudjelovanje. Područja mehanike su: Statika proučava mirovanje tijela Kinematika proučava gibanje tijela bez obzira na uzroke gibanja Dinamika proučava međudjelovanje tijela, te uzroke gibanja. S obzirom na vrstu tvari koju proučava, mehanika se razvrstava na: Mehanika čvrstih tijela Mehaniku tekućina (kapljevina i plinova) Mehaniku elastičnih i plastičnih tijela 4

5 Gibanje Gibanje je mijenjanje položaja tijela s obzirom na usporednu točku tijekom nekog vremenskog razdoblja. Svako gibanje ili mirovanje tijela ustanovljava se relativno prema mirnom tijelu. Gibanje se promatra u nekom koordinatnom sustavu. z T x y 5
 Položaj tijela u trenutku t i je")
6 Tijekom gibanja tijelo prolazi kroz neprekinuti niz točaka u prostoru koji nazivamo PUT. put s vrijeme t Položaj tijela tijekom gibanja je funkcija vremena s s(t) Položaj tijela u trenutku t i je s i s s t ) i ( i 6
7 Gibanja obzirom na put pravocrtna krivocrtna po otvorenoj krivulji po zatvorenoj krivulji po pravilnoj krivulji po pravilnoj krivulji po nepravilnoj krivulji po nepravilnoj krivulji 7


8 Gibanja u vremenu periodična neperiodična Gibanja s obzirom na brzinu konstantna brzina promjenljiva brzina Konstantno ubrzanje Promjenljivo ubrzanje 8
9 Pravocrtno gibanje a) b) A s Put A C B s Ds Ds Ds Vrijeme, t B U vremenskom razmaku Δt tijelo prijeđe put Δs t s i i t s i i t s i1 i1 Na intervalu puta brzina je određena omjerom: v i v i s t i lim t0 Jedinica m/s, km/h s t i ds dt Limes lim, derivacija puta po vremenu i 9
10 Krače pisano, brzina u trenutku t je: Joj, matematika v ds dt Brzina tijela je također funkcija vremena v v(t) Brzina tijela u trenutku t i je v i v v i ( t i ) Srednja brzina gibanja v s t t je trajanje gibanja, a s je ukupno prevaljeni put 10
11 Ako je u svim dijelovima puta brzina ista, gibanje je jednoliko pravocrtno. Pri jednolikom gibanju vrijedi Jednadžba koja opisuje gibanje v v s( t) sp v( t t p) s i s p v( t t p) i s vt s s k s p v s t t t k t p t s v 11
12 Jednoliko promjenljivo pravocrtno gibanje Promjena brzine u vremenu je ubrzanje ili akceleracija a i lim v dv dt d 2 s krače t0 t 2 i i dt dt 2 i dt Ubrzanje je općenito funkcija vremena a=a(t). Ako je ubrzanje tijekom pravocrtnog gibanja isto, gibanje je jednoliko promjenljivo. Mjerna jedinica ubrzanja m/s 2 v( t) vp v( t t p) Ako je u početna brzina v p =0,tada je nakon vremena t brzina jednaka v at a dv d 2 s 12
13 Brzina Brzina v v v a t v t a v 1 2 v 0 0 s vt t Vrijeme 0 0 a) b) v k at v 2 1 a t t Vrijeme Brzina a t s v t v 0 0 v vp at c) v t Vrijeme s 1 2 a t 2 13

14 Slobodni pad Galileo Galiley visina h 1 2 g t 2 vrijeme t 2h g konačna brzina v k 2gh Gravitacijsko ubrzanje g=9.81 m/s 2 14
15 Kružno gibanje Periodično gibanje r j s Obodna brzina Period je trajanje jednog obilaska T (s) rekvencija ili čestota f je recipročna vrijednost perioda f 1 T Jedinica herc (Hz=s -1 ) v Srednja obodna brzina s t v r 2 T 15
16 v 2 r j Δφ v 1 s Kutna brzina Srednja kutna brzina t 2 2 T f Srednja obodna i kutna brzina vezane su relacijom: v r Δv Δφ v v Obodno ubrzanje a v t v t v Kutno ubrzanje a k t 16
17 Jednoliko kruženje, kutno ubrzanje a k =0 Obodna brzina Kutna brzina v r v v 2 2 T f 2 r T Obodno ubrzanje a 2 r 2 v r 17

18 Sile, skelet, stabilnost tijela 18


19 1. Newtonov zakon Newtonovi zakoni Svako tijelo ostaje u stanju mirovanja ili jednolikog gibanja po pravcu dok ga vanjske sile ne prinude da to stanje promijeni. 19

.")
20 Svojstvo tijela: ustrajnost ili inercija Mjera ustrajnosti tijela masa Jedinica mase je kilogram, gram,.. Razlikujemo dvije vrste mase: troma masa teška masa Produkt brzine v i mase m se naziva veličina gibanja p (jedinica kg m/s). Koristi se i naziv nalet i impuls p m v 20
21 2. Newtonov zakon Promjena veličine gibanja s vremenom razmjerna je sili koja ju je uzrokovala i u smjeru je djelovanja te sile. ( mv) t Drugi iskaz zakona: Sila masi daje ubrzanje. m a Sila i ubrzanje a su vektori istog smjera. Jedinica za silu je njutn, N=kg m/s 2. 21
22 Gravitacijska sila Sila kojom tijelo u gravitacijskom polju tlači podlogu ili napinje objesište naziva se težinom tijela Gravitacijsko ubrzanje g=9,80665 m/s 2 ili g=9,81 m/s 2 Tijelo mase m=1 kg ima težinu G=mg=1*9,81 kg m/s 2 =9,81 N Ne miješati pojmove masa i težina! m a) G m g b) G m g m G m g 22


23 3. Newtonov zakon Sila akcije je uvijek jednaka sili reakcije, uzajamna djelovanja dvaju tijela su uvijek međusobno jednaka i suprotnog smjera. a r 23
24 Zbrajanje sila, (vektora) Sila je vektor koji ima hvatište, smjer i iznos Parlelogram sila
25
26 Slobode gibanja C B A a) BD CD AD C B A r CD BD AD Pomicanje ili translacija; točke tijela se gibaju po paralelnim pravcima Okretanje ili rotacija; točke tijela se gibaju po koncentričnim kružnicama Sva gibanja su složena od pomicanja i okretanja U trodimenzionalnom prostoru postoji 6 osnovnih gibanja, 3 neovisne translacije i 3 rotacije b) 26
27 27 Mirovanje s obzirom na pomicanje a) b) Tijelo se ne pomiče ako su sile koje djeluju na njega u ravnoteži, tj. ako je njihov vektorski zbroj jednak nuli n i i

28 Glavna sila koja djeluje na ljudsko tijelo je gravitacijska sila (W= težina) W = m g Stabilnost tijela u odnosu na gravitacijsku silu omogućava struktura kostiju ljudskog kostura! Gravitacijska sila W djeluje na težište T tijela! T ovisi o raspodjele mase u tijelu. Da bi se održala ravnoteža, T mora biti smješteno između stopala. Ako su stopala daleko, mora se uzeti u obzir horizontalna sila x. 28


29 Da bi se održala ravnoteža vektorska suma svih sila u težištu tijela T mora biti nula! 29
30 Mirovanje obzirom na okretanje O M j k r M O a) b) r sinj r O k k k r j M M Okretanje koje uzrokuje sila ovisi o sili ali i o njenoj udaljenosti od okretišta (kraku sile). izikalna veličina koja opisuje okretanje oko osi naziva se moment sile M, koji je jednak umnošku sile i kraka sile k M k c) d) 30
31 O M j k r M r sinj r M r M r sin O a) b) c) d) O k k k r j M M Moment sile M je vektorska veličina određena vektorskim umnoškom vektora udaljenosti r i sile. Osim vrijednosti M ima i smjer koji je okomit na smjer vektora r i. Iznos momenta sile je: Krak sile k=r sinφ Ako su sila i vektor udaljenosti r okomiti onda je krak sile k=r 31
32 Uvjeti mirovanja s obzirom na rotaciju Sila ili rezultanta više sila prolazi okretištem Momenti sila koje djeluju na tijelo međusobno se poništavaju M k M1 k11 M 1 M Ravnoteža dva momenta, dviju sila n i 1 M i 0 Općeniti uvjet; zbroj momenata svih sila koje djeluju na tijelo jednak je nuli. 32

33 Tijelo se pokreće silama mišića koje nastaju stezanjem i rastezanjem mišićnog tkiva Mišićne sile kontroliraju pokrete tjelesnih ekstremiteta. Većina mišićnih sila koristi polugu Poluga je tijelo učvršćeno samo jednom osi u okretištu oko koje se može okretati 33
 A i pasivne sile B (reakcije koja uravnotežuje aktivnu silu) naziva se učinkovitost ili efikasnost poluge η.")
34 Sile na poluzi Uvjeti mirovanja obzirom na pomicanje Uvjeti mirovanja obzirom na okretanje M r1 1 r2 2 1 M 2 k 11 k k k 2 1 Omjer aktivne sile (opterećenje) A i pasivne sile B (reakcije koja uravnotežuje aktivnu silu) naziva se učinkovitost ili efikasnost poluge η. A P k k P A 34
35 k k Okreti{te a) b) Okreti{te k Okreti{te k k a) Dvokraka poluga jednakih krakova b) Dvokraka poluga različitih krakova c) Jednokraka poluga k c) Razvrstavanje poluga prema rasporedu sila i učinkovitosti η 1. Razred: dvokraka poluga, k A >k P, η<1 2. Razred: jednokraka poluga, k A <k P, η>1 3. Razred: jednokraka poluga, k A >k P, η<1 35

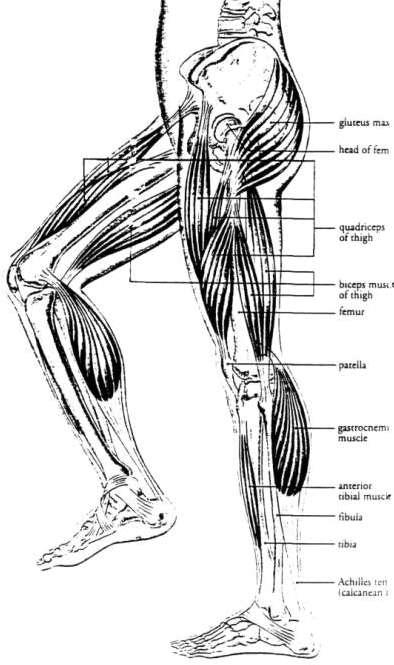
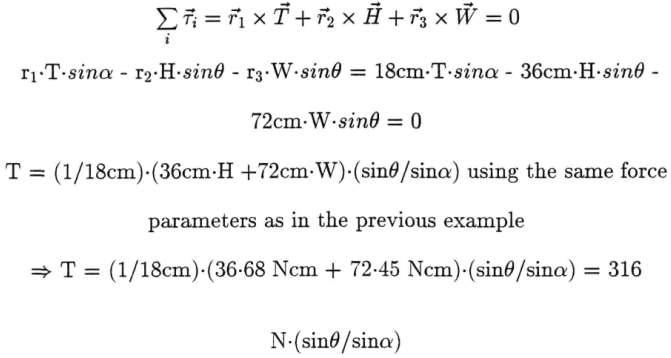
36 Tri primjera sistema poluge, W je primijenjena težina, je sila koja održava točku oslonca sistema poluge i M je sila mišića. 36
37 Podlaktica kao a) Dvokraka poluga b) Jednokraka poluga l k l k N G N a) b) 37



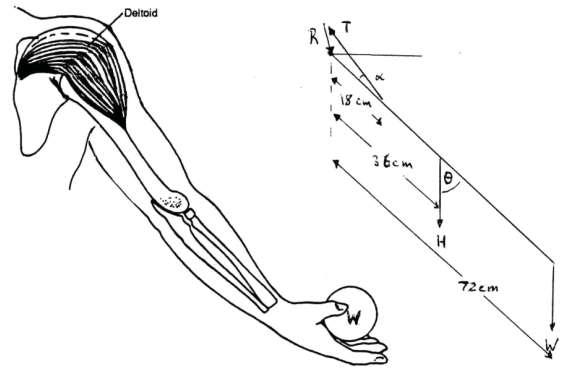
38 Biceps svojom kontrakcijom sila M podiže podlakticu i savladava težinu podlaktice H u njenom težištu i eventualni teret u dlanu W. 38
39 39
.")
40 Trenje se javlja između površine koja se giba i mirujuće površine: mk N t N je sila okomita na površinu N t G m k koeficijent trenja: guma: m k 0.8 zglobovi kosti: m k Ubrzanje pri kretanju može biti uzrokovano trenjem, mišićni silama ili vanjskim silama (n. pr. sudarom sa zidom). 40
 G h l α G b Tijelo je u ravnoteži kada je: = - T Rad na kosini W scos()")
41 Sile na kosini normalna komponenta N i tangencijalna komponenta T l N G cos( ) G b l T α N h T G sin( ) G h l α G b Tijelo je u ravnoteži kada je: = - T Rad na kosini W scos() 41
42 Rad, snaga, energija Da bi pomaknuli neko tijelo iz točke A u točku B moramo uložiti rad. Rad W je jednak umnošku primijenjene sile i prijeđenog puta s. smjer sile i put su paralelni W s s j D cos j a) b) Smjer sile Smjer puta W W Smjer sile i put zatvaraju neki kut φ s scos() Jedinica je njutnmetar, džul (J=N m) 42
43 Snaga P je rad izvršen u jedinici vremena. Snaga se određuje omjerom rada W i vremena t potrebnog da se rad izvrši. Jedinica snage je džul u sekundi, vat (W=J/s). P Sposobnost obavljanja rada naziva se energija Jedinica za energiju je ista kao i za rad (džul J) Energija je jedno od svojstava materije. Neuništiva je, te može prelaziti iz jednog oblika u drugi. Energija u prirodi: Mehanička Toplinska Električna Nuklearna Svjetlosna W t 43
44 Mehanička energija pojavljuje se u dva oblika: Potencijalna energija E p (energija položaja, oblika, obujma) Kinetička energija E k (energija gibanja) E p mgh E k mv 2 2 m m v h b) E = 0 E maks. a) c) E 0 E E E C maks. h 44



45 Unutar zatvorenog sustava zbroj potencijalne energije E p i kinetičke energije E k je stalan i jednak ukupnoj energiji sustava E. E=E p +E k 45


46 Još neki primjeri sačuvanja energije E=Ep+E k +W 46
.")
47 Neke sile nemaju hvatište u jednoj točki nego djeluju na plohu Tlak p je omjer sile i ploštine plohe S na koju ta sila djeluje. Jedinica za tlak je njutn po četvornom metru, paskal (Pa=N/m 2 ). Dopuštene jedinice bar=10 5 Pa, milimetar žive mmhg=133,322 Pa p S 47
48 To je sve o mehanici, a ako itko želi znati više neka pogleda dolje spomenuti web Ilustracije i ideje uglavnom posuđene iz slijedećih izvornika: Jakobović, Z.: izika i elektronika - odabrana poglavlja za studije Visoke zdravstvene škole. Zagreb: Visoka zdravstvena škola,
- pravac n je zadan s točkom T(2,0) i koeficijentom smjera k=2. (30 bodova)
 i koeficijentom smjera k=2. (30 bodova)") MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika
 1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
Rad, snaga, energija. Tehnička fizika 1 03/11/2017 Tehnološki fakultet
 Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
Rotacija krutog tijela
 Rotacija krutog tijela 6. Rotacija krutog tijela Djelovanje sile na tijelo promjena oblika tijela (deformacija) promjena stanja gibanja tijela Kruto tijelo pod djelovanjem vanjskih sila ne mijenja svoj
Rotacija krutog tijela 6. Rotacija krutog tijela Djelovanje sile na tijelo promjena oblika tijela (deformacija) promjena stanja gibanja tijela Kruto tijelo pod djelovanjem vanjskih sila ne mijenja svoj
Fizika 1. Auditorne vježbe 5. Dunja Polić. Dinamika: Newtonovi zakoni. Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva
 Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 2006/2007 Fizika 1 Auditorne vježbe 5 Dinamika: Newtonovi zakoni 12. prosinca 2008. Dunja Polić (dunja.polic@fesb.hr)
Fakultet elektrotehnike, strojarstva i brodogradnje Studij računarstva Školska godina 2006/2007 Fizika 1 Auditorne vježbe 5 Dinamika: Newtonovi zakoni 12. prosinca 2008. Dunja Polić (dunja.polic@fesb.hr)
Gravitacija. Gravitacija. Newtonov zakon gravitacije. Odredivanje gravitacijske konstante. Keplerovi zakoni. Gravitacijsko polje. Troma i teška masa
 Claudius Ptolemeus (100-170) - geocentrični sustav Nikola Kopernik (1473-1543) - heliocentrični sustav Tycho Brahe (1546-1601) precizno bilježio putanje nebeskih tijela 1600. Johannes Kepler (1571-1630)
Claudius Ptolemeus (100-170) - geocentrični sustav Nikola Kopernik (1473-1543) - heliocentrični sustav Tycho Brahe (1546-1601) precizno bilježio putanje nebeskih tijela 1600. Johannes Kepler (1571-1630)
Rad, energija i snaga
 Rad, energija i snaga Željan Kutleša Sandra Bodrožić Rad Rad je skalarna fizikalna veličina koja opisuje djelovanje sile F na tijelo duž pomaka x. = = cos Oznaka za rad je W, a mjerna jedinica J (džul).
Rad, energija i snaga Željan Kutleša Sandra Bodrožić Rad Rad je skalarna fizikalna veličina koja opisuje djelovanje sile F na tijelo duž pomaka x. = = cos Oznaka za rad je W, a mjerna jedinica J (džul).
Kružno gibanje. Pojmovi. Radijus vektor (r), duljina luka (s) Kut (φ), kutna brzina (ω), obodna brzina (v)
, duljina luka (s) Kut (φ), kutna brzina (ω), obodna brzina (v)") Predavanja 2 Kružno gibanje Pojmovi Kod kružnog gibanja položaj čestice jednoznačno je određen kutom kojeg radijus vektor zatvara s referentnim pravcem Radijus vektor (r), duljina luka (s) Kut (φ), kutna
Predavanja 2 Kružno gibanje Pojmovi Kod kružnog gibanja položaj čestice jednoznačno je određen kutom kojeg radijus vektor zatvara s referentnim pravcem Radijus vektor (r), duljina luka (s) Kut (φ), kutna
šupanijsko natjecanje iz zike 2017/2018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova)
") šupanijsko natjecanje iz zike 017/018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova) U prvom vremenskom intervalu t 1 = 7 s automobil se giba jednoliko ubrzano ubrzanjem
šupanijsko natjecanje iz zike 017/018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova) U prvom vremenskom intervalu t 1 = 7 s automobil se giba jednoliko ubrzano ubrzanjem
Dinamika tijela. a g A mg 1 3cos L 1 3cos 1
 Zadatak, Štap B duljine i mase m pridržan užetom u točki B, miruje u vertikalnoj ravnini kako je prikazano na skii. reba odrediti reakiju u ležaju u trenutku kad se presječe uže u točki B. B Rješenje:
Zadatak, Štap B duljine i mase m pridržan užetom u točki B, miruje u vertikalnoj ravnini kako je prikazano na skii. reba odrediti reakiju u ležaju u trenutku kad se presječe uže u točki B. B Rješenje:
Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika
 3. Dinamika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji opisuje
3. Dinamika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji opisuje
Prostorni spojeni sistemi
 Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Rad, snaga i energija. Dinamika. 12. dio
 Rad, snaga i energija Dinaika 1. dio Veliine u ehanici 1. Skalari. Vektori 3. Tenzori II. reda 4. Tenzori IV. reda 1. Skalari: 3 0 1 podatak + jerna jedinica (tenzori nultog reda). Vektori: 3 1 3 podatka
Rad, snaga i energija Dinaika 1. dio Veliine u ehanici 1. Skalari. Vektori 3. Tenzori II. reda 4. Tenzori IV. reda 1. Skalari: 3 0 1 podatak + jerna jedinica (tenzori nultog reda). Vektori: 3 1 3 podatka
- osnovni zakoni gibanja (Newtonovi aksiomi) - gibanja duž ravne podloge i kosine - sila trenja - vrste sila
 - gibanja duž ravne podloge i kosine - sila trenja - vrste sila") Dinamika - osnovni zakoni gibanja (Newtonovi aksiomi) - gibanja duž ravne podloge i kosine - sila trenja - vrste sila Osnovni zakoni gibanja: Newtonovi aksiomi Sir Isaac Newton (1642. 1727.) by Sir Godfrey
Dinamika - osnovni zakoni gibanja (Newtonovi aksiomi) - gibanja duž ravne podloge i kosine - sila trenja - vrste sila Osnovni zakoni gibanja: Newtonovi aksiomi Sir Isaac Newton (1642. 1727.) by Sir Godfrey
PROSTORNI STATIČKI ODREĐENI SUSTAVI
 PROSTORNI STATIČKI ODREĐENI SUSTAVI - svi elementi ne leže u istoj ravnini q 1 Z F 1 F Y F q 5 Z 8 5 8 1 7 Y y z x 7 X 1 X - svi elementi su u jednoj ravnini a opterećenje djeluje izvan te ravnine Z Y
PROSTORNI STATIČKI ODREĐENI SUSTAVI - svi elementi ne leže u istoj ravnini q 1 Z F 1 F Y F q 5 Z 8 5 8 1 7 Y y z x 7 X 1 X - svi elementi su u jednoj ravnini a opterećenje djeluje izvan te ravnine Z Y
Gauss, Stokes, Maxwell. Vektorski identiteti ( ),
,") Vektorski identiteti ( ), Gauss, Stokes, Maxwell Saša Ilijić 21. listopada 2009. Saša Ilijić, predavanja FER/F2: Vektorski identiteti, nabla, Gauss, Stokes, Maxwell... (21. listopada 2009.) Skalarni i
Vektorski identiteti ( ), Gauss, Stokes, Maxwell Saša Ilijić 21. listopada 2009. Saša Ilijić, predavanja FER/F2: Vektorski identiteti, nabla, Gauss, Stokes, Maxwell... (21. listopada 2009.) Skalarni i
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika. Monotonost i ekstremi. Katica Jurasić. Rijeka, 2011.
 Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Vektorska analiza doc. dr. Edin Berberović.
 Vektorska analiza doc. dr. Edin Berberović eberberovic@mf.unze.ba Vektorska analiza Vektorska algebra (ponavljanje) Vektorske funkcije (funkcije sa vektorima) Jednostavna analiza (diferenciranje) Učenje
Vektorska analiza doc. dr. Edin Berberović eberberovic@mf.unze.ba Vektorska analiza Vektorska algebra (ponavljanje) Vektorske funkcije (funkcije sa vektorima) Jednostavna analiza (diferenciranje) Učenje
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
Primjeri zadataka iz Osnova fizike
 Mjerne jedinice 1. Koja je od navedenih jedinica osnovna u SI-sustavu? a) džul b) om c) vat d) amper 2. Koja je od navedenih jedinica osnovna u SI-sustavu? a) kut b) brzina c) koncentracija d) količina
Mjerne jedinice 1. Koja je od navedenih jedinica osnovna u SI-sustavu? a) džul b) om c) vat d) amper 2. Koja je od navedenih jedinica osnovna u SI-sustavu? a) kut b) brzina c) koncentracija d) količina
RAD, SNAGA I ENERGIJA
 RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
Repetitorij-Dinamika. F i Zakon očuvanja impulsa (ZOI): i p i = j p j. Zakon očuvanja energije (ZOE):
: i p i = j p j. Zakon očuvanja energije (ZOE):") Repetitorij-Dinamika Dinamika materijalne točke Sila: F p = m a = lim t 0 t = d p dt m a = i F i Zakon očuvanja impulsa (ZOI): i p i = j p j i p ix = j p jx te i p iy = j p jy u 2D sustavu Zakon očuvanja
Repetitorij-Dinamika Dinamika materijalne točke Sila: F p = m a = lim t 0 t = d p dt m a = i F i Zakon očuvanja impulsa (ZOI): i p i = j p j i p ix = j p jx te i p iy = j p jy u 2D sustavu Zakon očuvanja
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
0.1. Pojam mehanike. Mehanika tekućina i plinova (mehanika fluida)
") 1 0. Uvod u mehaniku 0.1. Pojam mehanike Zakoni klasične fizike još se u 16. stoljeću počinju primjenjivati za rješavanje tehničkih problema. Na taj način počinje razvoj posebne grane fizike koju nazivamo
1 0. Uvod u mehaniku 0.1. Pojam mehanike Zakoni klasične fizike još se u 16. stoljeću počinju primjenjivati za rješavanje tehničkih problema. Na taj način počinje razvoj posebne grane fizike koju nazivamo
1.4 Tangenta i normala
 28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
Vrijedi relacija: Suma kvadrata cosinusa priklonih kutova sile prema koordinatnim osima jednaka je jedinici.
 Za adani sustav prostornih sila i j k () oktant i j k () oktant koje djeluju na materijalnu toku odredite: a) reultantu silu? b) ravnotežnu silu? a) eultanta sila? i j k 8 Vektor reultante: () i 8 j k
Za adani sustav prostornih sila i j k () oktant i j k () oktant koje djeluju na materijalnu toku odredite: a) reultantu silu? b) ravnotežnu silu? a) eultanta sila? i j k 8 Vektor reultante: () i 8 j k
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Linearna algebra 2 prvi kolokvij,
 1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
Nastavna jedinica. Gibanje tijela je... tijela u... Položaj točke u prostoru opisujemo pomoću... prostor, brzina, koordinatni sustav,
 1. UVOD 1. * Odgovorite na sljedeća pitanja tako da dopunite tvrdnje. 1.1 Što je gibanje tijela? Gibanje tijela je... tijela u... 1.2 Osnovni parametri u kinematici su... i... 1.3 Na koji način opisujemo
1. UVOD 1. * Odgovorite na sljedeća pitanja tako da dopunite tvrdnje. 1.1 Što je gibanje tijela? Gibanje tijela je... tijela u... 1.2 Osnovni parametri u kinematici su... i... 1.3 Na koji način opisujemo
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
Izradio: Željan Kutleša, mag.educ.phys. Srednja tehnička prometna škola Split
 DINAMIKA Izradio: Željan Kutleša, mag.educ.phys. Srednja tehnička prometna škola Split Ova knjižica prvenstveno je namijenjena učenicima Srednje tehničke prometne škole Split. U knjižici su korišteni zadaci
DINAMIKA Izradio: Željan Kutleša, mag.educ.phys. Srednja tehnička prometna škola Split Ova knjižica prvenstveno je namijenjena učenicima Srednje tehničke prometne škole Split. U knjižici su korišteni zadaci
π π ELEKTROTEHNIČKI ODJEL i) f (x) = x 3 x 2 x + 1, a = 1, b = 1;
 f (x) = x 3 x 2 x + 1, a = 1, b = 1;") 1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
Newtonov opdi zakon gravitacije
 Predavanje 3 Newtonov opdi zakon gravitacije F=Gm 1 m 2 /R 2 r Jedinični vektor G=6.67 10-11 Nm 2 kg -2 gravitacijska konstanta (Sir Henry Cavendish 1798) G nije isto što i g Gravitacijska sila djeluje
Predavanje 3 Newtonov opdi zakon gravitacije F=Gm 1 m 2 /R 2 r Jedinični vektor G=6.67 10-11 Nm 2 kg -2 gravitacijska konstanta (Sir Henry Cavendish 1798) G nije isto što i g Gravitacijska sila djeluje
Dinamika krutog tijela ( ) Gibanje krutog tijela. Gibanje krutog tijela. Pojmovi: C. Složeno gibanje. A. Translacijsko gibanje krutog tijela. 14.
 Gibanje krutog tijela. Gibanje krutog tijela. Pojmovi: C. Složeno gibanje. A. Translacijsko gibanje krutog tijela. 14.") Pojmo:. Vektor se F (transacja). oment se (rotacja) Dnamka krutog tjea. do. oment tromost masa. Rad krutog tjea A 5. Knetka energja k 6. oment kona gbanja 7. u momenta kone gbanja momenta se f ( ) Gbanje
Pojmo:. Vektor se F (transacja). oment se (rotacja) Dnamka krutog tjea. do. oment tromost masa. Rad krutog tjea A 5. Knetka energja k 6. oment kona gbanja 7. u momenta kone gbanja momenta se f ( ) Gbanje
TRIGONOMETRIJA TROKUTA
 TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
1. Duljinska (normalna) deformacija ε. 2. Kutna (posmina) deformacija γ. 3. Obujamska deformacija Θ
 deformacija ε. 2. Kutna (posmina) deformacija γ. 3. Obujamska deformacija Θ") Deformaije . Duljinska (normalna) deformaija. Kutna (posmina) deformaija γ 3. Obujamska deformaija Θ 3 Tenor deformaija tenor drugog reda ij γ γ γ γ γ γ 3 9 podataka+mjerna jedinia 4 Simetrinost tenora
Deformaije . Duljinska (normalna) deformaija. Kutna (posmina) deformaija γ 3. Obujamska deformaija Θ 3 Tenor deformaija tenor drugog reda ij γ γ γ γ γ γ 3 9 podataka+mjerna jedinia 4 Simetrinost tenora
( , treći kolokvij) 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)
 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)") A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
UZDUŽNA DINAMIKA VOZILA
 UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
UZDUŽNA DINAMIKA VOZILA MODEL VOZILA U UZDUŽNOJ DINAMICI Zanemaruju se sva pomeranja u pravcima normalnim na pravac kretanja (ΣZ i = 0, ΣY i = 0) Zanemaruju se svi vidovi pobuda na oscilovanje i vibracije,
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
2.7 Primjene odredenih integrala
 . INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
. INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
Algebra Vektora. pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske
 Algebra Vektora 1 Algebra vektora 1.1 Definicija vektora pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske veličine za opis skalarne veličine trebamo zadati samo njezin iznos (npr.
Algebra Vektora 1 Algebra vektora 1.1 Definicija vektora pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske veličine za opis skalarne veličine trebamo zadati samo njezin iznos (npr.
SEMINAR IZ KOLEGIJA ANALITIČKA KEMIJA I. Studij Primijenjena kemija
 SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
MEHANIKA FLUIDA HIDROSTATIKA 5. Osnovna jednadžba gibanja (II. Newtonov zakon) čestice idealnog fluida i realnog fluida u relativnom mirovanju
 čestice idealnog fluida i realnog fluida u relativnom mirovanju") MENIK LUID IDTTIK 5. IDTTIK snovna jednadžba ibanja (II. Newtonov akon) čestice idealno fluida i realno fluida u relativnom mirovanju σ d av d fdv+ σd n V V t av d fdv+ ( pn+ σ ) V V d U anemarenje viskoni
MENIK LUID IDTTIK 5. IDTTIK snovna jednadžba ibanja (II. Newtonov akon) čestice idealno fluida i realno fluida u relativnom mirovanju σ d av d fdv+ σd n V V t av d fdv+ ( pn+ σ ) V V d U anemarenje viskoni
TRIGONOMETRIJSKE FUNKCIJE I I.1.
 TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
Novi Sad god Broj 1 / 06 Veljko Milković Bulevar cara Lazara 56 Novi Sad. Izveštaj o merenju
 Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Linearna algebra 2 prvi kolokvij,
 Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
7. Titranje, prigušeno titranje, harmonijsko titranje
 7. itranje, prigušeno titranje, harmonijsko titranje IRANJE Općenito je titranje mijenjanje bilo koje mjerne veličine u nekom sustavu oko srednje vrijednosti. U tehnici titranje podrazumijeva takvo gibanje
7. itranje, prigušeno titranje, harmonijsko titranje IRANJE Općenito je titranje mijenjanje bilo koje mjerne veličine u nekom sustavu oko srednje vrijednosti. U tehnici titranje podrazumijeva takvo gibanje
Dijagrami: Greda i konzola. Prosta greda. II. Dijagrami unutarnjih sila. 2. Popre nih sila TZ 3. Momenata savijanja My. 1. Uzdužnih sila N. 11.
 Dijagrami:. Udužnih sia N Greda i konoa. Popre nih sia TZ 3. Momenata savijanja My. dio Prosta greda. Optere ena koncentriranom siom F I. Reaktivne sie:. M A = 0 R B F a = 0. M B = 0 R A F b = 0 3. F =
Dijagrami:. Udužnih sia N Greda i konoa. Popre nih sia TZ 3. Momenata savijanja My. dio Prosta greda. Optere ena koncentriranom siom F I. Reaktivne sie:. M A = 0 R B F a = 0. M B = 0 R A F b = 0 3. F =
Lijeva strana prethodnog izraza predstavlja diferencijalnu formu rada rezultantne sile
 RAD SILE Sila se može tokom kretanja opisati kao zavisnost od vremena t ili od trenutnog vektora položaja r. U poglavlju o impulsu sile i količini kretanja je pokazano na koji način se može povezati kretanje
RAD SILE Sila se može tokom kretanja opisati kao zavisnost od vremena t ili od trenutnog vektora položaja r. U poglavlju o impulsu sile i količini kretanja je pokazano na koji način se može povezati kretanje
Masa, Centar mase & Moment tromosti
 FAKULTET ELEKTRTEHNIKE, STRARSTVA I BRDGRADNE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba Masa, Centar mase & Moment tromosti Ime i rezime rosinac 008. Zadatak:
FAKULTET ELEKTRTEHNIKE, STRARSTVA I BRDGRADNE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba Masa, Centar mase & Moment tromosti Ime i rezime rosinac 008. Zadatak:
Deformacije. Tenzor deformacija tenzor drugog reda. Simetrinost tenzora deformacija. 1. Duljinska deformacija ε. 1. Duljinska (normalna) deformacija ε
 deformacija ε") Deformae. Duljinska (normalna) deformaa. Kutna (posmina) deformaa. Obujamska deformaa Θ Tenor deformaa tenor drugog reda 9 podatakamjerna jedinia Simetrinost tenora deformaa 6 podataka 4. Duljinska deformaa
Deformae. Duljinska (normalna) deformaa. Kutna (posmina) deformaa. Obujamska deformaa Θ Tenor deformaa tenor drugog reda 9 podatakamjerna jedinia Simetrinost tenora deformaa 6 podataka 4. Duljinska deformaa
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
M086 LA 1 M106 GRP Tema: Uvod. Operacije s vektorima.
 M086 LA 1 M106 GRP Tema:.. 5. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 2 M086 LA 1, M106 GRP.. 2/17 P 1 www.fizika.unios.hr/grpua/
M086 LA 1 M106 GRP Tema:.. 5. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 2 M086 LA 1, M106 GRP.. 2/17 P 1 www.fizika.unios.hr/grpua/
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II
 1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
(P.I.) PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.
 PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.") 1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
1 Afina geometrija. 1.1 Afini prostor. Definicija 1.1. Pod afinim prostorom nad poljem K podrazumevamo. A - skup taqaka
 1 Afina geometrija 11 Afini prostor Definicija 11 Pod afinim prostorom nad poljem K podrazumevamo svaku uređenu trojku (A, V, +): A - skup taqaka V - vektorski prostor nad poljem K + : A V A - preslikavanje
1 Afina geometrija 11 Afini prostor Definicija 11 Pod afinim prostorom nad poljem K podrazumevamo svaku uređenu trojku (A, V, +): A - skup taqaka V - vektorski prostor nad poljem K + : A V A - preslikavanje
INTELIGENTNO UPRAVLJANJE
 INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
INTELIGENTNO UPRAVLJANJE Fuzzy sistemi zaključivanja Vanr.prof. Dr. Lejla Banjanović-Mehmedović Mehmedović 1 Osnovni elementi fuzzy sistema zaključivanja Fazifikacija Baza znanja Baze podataka Baze pravila
Numerička matematika 2. kolokvij (1. srpnja 2009.)
") Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Riješeni zadaci: Limes funkcije. Neprekidnost
 Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
Zadaci iz trigonometrije za seminar
 Zadaci iz trigonometrije za seminar FON: 1. Vrednost izraza sin 1 cos 6 jednaka je: ; B) 1 ; V) 1 1 + 1 ; G) ; D). 16. Broj rexea jednaqine sin x cos x + cos x = sin x + sin x na intervalu π ), π je: ;
Zadaci iz trigonometrije za seminar FON: 1. Vrednost izraza sin 1 cos 6 jednaka je: ; B) 1 ; V) 1 1 + 1 ; G) ; D). 16. Broj rexea jednaqine sin x cos x + cos x = sin x + sin x na intervalu π ), π je: ;
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
radni nerecenzirani materijal za predavanja
 Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Kažemo da je funkcija f : a, b R u točki x 0 a, b postiže lokalni minimum ako postoji okolina O(x 0 ) broja x 0 takva da je
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Kažemo da je funkcija f : a, b R u točki x 0 a, b postiže lokalni minimum ako postoji okolina O(x 0 ) broja x 0 takva da je
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
Zadatak 003 (Vesna, osnovna škola) Kolika je težina tijela koje savladava silu trenja 30 N, ako je koeficijent trenja 0.5?
 Kolika je težina tijela koje savladava silu trenja 30 N, ako je koeficijent trenja 0.5?") Zadata 00 (Jasna, osnovna šola) Kolia je težina tijela ase 400 g? Rješenje 00 Masa tijela izražava se u ilograia pa najprije orao 400 g pretvoriti u ilograe. Budući da g = 000 g, orao 400 g podijeliti
Zadata 00 (Jasna, osnovna šola) Kolia je težina tijela ase 400 g? Rješenje 00 Masa tijela izražava se u ilograia pa najprije orao 400 g pretvoriti u ilograe. Budući da g = 000 g, orao 400 g podijeliti
Rješenje 469. m = 200 g = 0.2 kg, v 0 = 5 m / s, h = 1.75 m, h 1 = 0.6 m, g = 9.81 m / s 2, E k =?
 Zadatak 469 (Davor, tehnička škola) Kuglicu mase 00 g izbacimo početnom brzinom 5 m / s sa visine.75 m. Koliko iznosi kinetička energija kuglice kada se nalazi na visini 0.6 m iznad tla? Zanemarite gubitak
Zadatak 469 (Davor, tehnička škola) Kuglicu mase 00 g izbacimo početnom brzinom 5 m / s sa visine.75 m. Koliko iznosi kinetička energija kuglice kada se nalazi na visini 0.6 m iznad tla? Zanemarite gubitak
Princip inercije. Ako tijelo ostavimo na nekom mjestu ono će ostati mirovati ili se gibati jednolikom brzinom po pravcu.
 Princip inercije Ako tijelo ostavimo na nekom mjestu ono će ostati mirovati ili se gibati jednolikom brzinom po pravcu. Razvio koncept dinamike Pretpostavio je da je gibanje tijela nečim uzrokovano Definirao
Princip inercije Ako tijelo ostavimo na nekom mjestu ono će ostati mirovati ili se gibati jednolikom brzinom po pravcu. Razvio koncept dinamike Pretpostavio je da je gibanje tijela nečim uzrokovano Definirao
5. PARCIJALNE DERIVACIJE
 5. PARCIJALNE DERIVACIJE 5.1. Izračunajte parcijalne derivacije sljedećih funkcija: (a) f (x y) = x 2 + y (b) f (x y) = xy + xy 2 (c) f (x y) = x 2 y + y 3 x x + y 2 (d) f (x y) = x cos x cos y (e) f (x
5. PARCIJALNE DERIVACIJE 5.1. Izračunajte parcijalne derivacije sljedećih funkcija: (a) f (x y) = x 2 + y (b) f (x y) = xy + xy 2 (c) f (x y) = x 2 y + y 3 x x + y 2 (d) f (x y) = x cos x cos y (e) f (x
Kaskadna kompenzacija SAU
 Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
Kaskadna kompenzacija SAU U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su
2. Ako je funkcija f(x) parna onda se Fourierov red funkcije f(x) reducira na Fourierov kosinusni red. f(x) cos
 parna onda se Fourierov red funkcije f(x) reducira na Fourierov kosinusni red. f(x) cos") . KOLOKVIJ PRIMIJENJENA MATEMATIKA FOURIEROVE TRANSFORMACIJE 1. Za periodičnu funkciju f(x) s periodom p=l Fourierov red je gdje su a,a n, b n Fourierovi koeficijenti od f(x) gdje su a =, a n =, b n =..
. KOLOKVIJ PRIMIJENJENA MATEMATIKA FOURIEROVE TRANSFORMACIJE 1. Za periodičnu funkciju f(x) s periodom p=l Fourierov red je gdje su a,a n, b n Fourierovi koeficijenti od f(x) gdje su a =, a n =, b n =..
Dijagonalizacija operatora
 Dijagonalizacija operatora Problem: Može li se odrediti baza u kojoj zadani operator ima dijagonalnu matricu? Ova problem je povezan sa sljedećim pojmovima: 1 Karakteristični polinom operatora f 2 Vlastite
Dijagonalizacija operatora Problem: Može li se odrediti baza u kojoj zadani operator ima dijagonalnu matricu? Ova problem je povezan sa sljedećim pojmovima: 1 Karakteristični polinom operatora f 2 Vlastite
2. KOLOKVIJ IZ MATEMATIKE 1
 2 cos(3 π 4 ) sin( + π 6 ). 2. Pomoću linearnih transformacija funkcije f nacrtajte graf funkcije g ako je, g() = 2f( + 3) +. 3. Odredite domenu funkcije te odredite f i njenu domenu. log 3 2 + 3 7, 4.
2 cos(3 π 4 ) sin( + π 6 ). 2. Pomoću linearnih transformacija funkcije f nacrtajte graf funkcije g ako je, g() = 2f( + 3) +. 3. Odredite domenu funkcije te odredite f i njenu domenu. log 3 2 + 3 7, 4.
Matematička analiza 1 dodatni zadaci
 Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
Ĉetverokut - DOMAĆA ZADAĆA. Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke.
 Ĉetverokut - DOMAĆA ZADAĆA Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke. 1. Duljine dijagonala paralelograma jednake su 6,4 cm i 11 cm, a duljina jedne njegove
Ĉetverokut - DOMAĆA ZADAĆA Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke. 1. Duljine dijagonala paralelograma jednake su 6,4 cm i 11 cm, a duljina jedne njegove
Izdavač HINUS Zagreb, Miramarska 13 B tel. (01) , , fax (01)
 , , fax (01)") Izdavač HINUS Zagreb, Miramarska 3 B tel. (0) 65 4 96, 668738, 6 55 8 fax (0) 6 55 8 e-mail hinus@zg.htnet.hr Urednik Mr. sc. Hrvoje Zrnčić Recenzenti Prof. dr. sc. Ivica Picek Prof. Anđela Gojević ISBN
Izdavač HINUS Zagreb, Miramarska 3 B tel. (0) 65 4 96, 668738, 6 55 8 fax (0) 6 55 8 e-mail hinus@zg.htnet.hr Urednik Mr. sc. Hrvoje Zrnčić Recenzenti Prof. dr. sc. Ivica Picek Prof. Anđela Gojević ISBN
( x) ( ) ( ) ( x) ( ) ( x) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
 ( ) ( ) ( x) ( ) ( x) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )") Zadatak 08 (Vedrana, maturantica) Je li unkcija () = cos (sin ) sin (cos ) parna ili neparna? Rješenje 08 Funkciju = () deiniranu u simetričnom području a a nazivamo: parnom, ako je ( ) = () neparnom,
Zadatak 08 (Vedrana, maturantica) Je li unkcija () = cos (sin ) sin (cos ) parna ili neparna? Rješenje 08 Funkciju = () deiniranu u simetričnom području a a nazivamo: parnom, ako je ( ) = () neparnom,
Ponašanje pneumatika pod dejstvom bočne sile
 Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
Jednoliko pravocrtno gibanje Jednoliko promjenljivo pravocrtno gibanje Slobodni pad Kružno gibanje Mirovanje s obzirom na pomicanje Uvjeti mirovanja
 Mehanika 1 Jednoliko pavoctno gibanje Jednoliko pomjenljivo pavoctno gibanje Slobodni pad Kužno gibanje Miovanje s obziom na pomicanje Uvjeti miovanja s obziom na otaciju Sile na poluzi Sile na kosini
Mehanika 1 Jednoliko pavoctno gibanje Jednoliko pomjenljivo pavoctno gibanje Slobodni pad Kužno gibanje Miovanje s obziom na pomicanje Uvjeti miovanja s obziom na otaciju Sile na poluzi Sile na kosini
PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE)
") (Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
(Enegane) List: PARNA POSTROJENJA ZA KOMBINIRANU PROIZVODNJU ELEKTRIČNE I TOPLINSKE ENERGIJE (ENERGANE) Na mjestima gdje se istovremeno troši električna i toplinska energija, ekonomičan način opskrbe energijom
ČVRSTOĆA 13. GEOMETRIJSKE KARAKTERISTIKE RAVNIH PRESJEKA ŠTAPA
 ČVRSTOĆA 13. GEOMETRIJSKE KARAKTERISTIKE RAVNIH PRESJEKA ŠTAPA STATIČKI MOMENTI I MOMENTI INERCIJE RAVNIH PLOHA Kao što pri aksijalnom opterećenju štapa apsolutna vrijednost naprezanja zavisi, između ostalog,
ČVRSTOĆA 13. GEOMETRIJSKE KARAKTERISTIKE RAVNIH PRESJEKA ŠTAPA STATIČKI MOMENTI I MOMENTI INERCIJE RAVNIH PLOHA Kao što pri aksijalnom opterećenju štapa apsolutna vrijednost naprezanja zavisi, između ostalog,
Moguća i virtuelna pomjeranja
 Dnamka sstema sa vezama Moguća vrtuelna pomjeranja f k ( r 1,..., r N, t) = 0 (k = 1, 2,..., K ) df k dt = r + t = 0 d r = r dt moguća pomjeranja zadovoljavaju uvjet: df k = d r + dt = 0. t δ r = δx +
Dnamka sstema sa vezama Moguća vrtuelna pomjeranja f k ( r 1,..., r N, t) = 0 (k = 1, 2,..., K ) df k dt = r + t = 0 d r = r dt moguća pomjeranja zadovoljavaju uvjet: df k = d r + dt = 0. t δ r = δx +
Rad, energija i snaga
 Rad, energija i snaga 1. Koliko se puta promijeni kinetička energija automobila kada se njegova brzina poveća tri puta? A. Poveća se 3 puta. B. Poveća se 6 puta. C. Poveća se 9 puta. D. Poveća se 12 puta.
Rad, energija i snaga 1. Koliko se puta promijeni kinetička energija automobila kada se njegova brzina poveća tri puta? A. Poveća se 3 puta. B. Poveća se 6 puta. C. Poveća se 9 puta. D. Poveća se 12 puta.