RELATIVISTIČKA MEHANIKA
|
|
|
- Κυπριανός Παπαδόπουλος
- 6 χρόνια πριν
- Προβολές:
Transcript
1 RELATIVISTIČKA MEHANIKA prof. dr. sc. Antonije Dulčić uz dodatke doc. dr. sc. Nikola Poljak Krajem 9. stoljeća eksperimentalno je utvrdeno da brzina svjetlosti ne podliježe Galileijevim transformacijama, nego je naprotiv jednaka u svim inercijalnim sustavima. Valjalo je stoga načiniti značajnu reviziju klasične fizike kako bi se nova teorija uskladila sa svim eksperimentalnim opažanjima. Albert Einstein je početkom 20. stoljeća postavio uspješnu teoriju relativnosti koja obuhvaća klasičnu fiziku kao dobru aproksimaciju kod brzina koje su mnogo manje od brzine svjetlosti.. Brzina svjetlosti Od davnina se postavljalo pitanje o pojavi svjetlosti, te posebno o tome širi li se svjetlost od izvora do opažača trenutno, ili nekom brzinom, možda jako velikom, ali ipak konačnom. Takoder, bilo je poznato da se svjetlost može opisivati kao valna pojava pa se postavljalo pitanje koji je medij potreban za širenje svjetlosti kao što su potrebni mediji za zvuk ili valove na vodi). Prvo mjerenje brzine svjetlosti obavio je Rømer u 7. stoljeću na temelju astronomskih opažanja. Njegov je rezultat iznosio 2, ms, čime je u ono doba ispravno utvrden ne samo red veličine za brzinu svjetlosti, nego i vrijednost koja se od ispravne razlikuje za faktor manji od dva. Prvo terestričko mjerenje brzine svjetlosti obavili su francuski fizičari Fizeau i Foucault sredinom 9. stoljeća. Iz udaljenosti medu postavljenim zrcalima i vremena potrebnog da zraka svjetlosti prevali zadani put, izračunali su da brzina svjetlosti iznosi 2, ms, što je veoma blizu točnoj vrijednosti. Kad je ustanovljen iznos brzine svjetlosti, postavilo se pitanje koje značenje ima ta brzina ako promatranja možemo vršiti u raznim referentnim sustavima. U mehanici je odavna bio utvrden princip relativnosti gibanja, kojim se podrazumijevalo da o brzini tijela nema smisla govoriti ukoliko se ne utvrdi referentni sustav u odnosu na koji se ta brzina odreduje. Za svjetlost se mogla očekivati ista zakonitost, ali to nije bilo lako eksperimentalno utvrditi zbog velike brzine svjetlosti naspram brzinama raspoloživih referentnih sustava. 85. godine je Hippolyte Fizeau krenuo mjeriti relativnu brzinu svjetlosti u vodi poznate brzine u odnosu na mirujućeg promatrača. Prema rezultatima klasične fizike, ako svjetlost putuje nekom brzinom u odnosu na mirujući medij, tad će se ta brzina povećati u odnosu na mirujućeg promatrača ukoliko se i medij giba u smjeru širenja svjetlosti ili smanjiti ukoliko se dešava suprotno. Ako se svjetlost giba brzinom c n u odnosu na medij, a medij brzinom v, onda se u ovim jednostavnim slučajevima brzina svjetlosti u odnosu na promatrača dobije jednostavnim zbrajanjem ili oduzimanjem brzina c n i v. Fizeau je stvarno izmjerio efekt povlačenja svjetlosti, no dobivena brzina u odnosu na promatrača nije bila jednaka c n ± v, već v rel c n ± v ) n 2.) Zaključak eksperimenta bio je da postoji medij kroz koji se giba svjetlost, tad zvan eter, i da taj medij povlači svjetlost kao što i tijelo vode u gibanju sa sobom povlači površinske valove), no to povlačenje samo je djelomično. Ovaj rezultat
2 kasnije su potvrdili i drugi istraživači jer je bio jako zabrinjavajuć, pogotovo znajući da je postojao niz drugih eksperimenata koji su pokazivali da ne postoji povlačenje etera iako možda postoji eter). Trebalo je proći više od pola stoljeća da se pokaže kako eter ustvari ne postoji, a Fizeauov je rezultat posljedica specijalne teorije relativnosti. zrake svjetlosti. Bio je to iznenadujući rezultat koji je potpuno odudarao od poznatih Galileijevih transformacija za brzine. Pokazalo se da je brzina svjetlosti jednaka u svim inercijalnim sustavima, tj. da predstavlja univerzalnu prirodnu konstantu. Rezultat Michelsona i Morleya značio je ujedno da ne postoji neki preferirani ili glavni inercijalni sustav u Svemiru te da je pojam etera potpuno nepotreban. Zaključilo se da su svi inercijalni sustavi jednakopravni, barem što se svjetlosti tiče. Eksperiment je ponovljen puno puta, s varijacijama u doba dana, doba godine, kut zakrenutosti interferometra itd. Konačan zaključak eksperimenta prikazan je na slici.2 i lijepo je izražen Michelsonovim riječima Lordu Rayleighu: Slika.: Michelsonov i Morleyev interferometar. Na detektoru se opaža interferencija dviju zraka nakon njihovih refleksija na zrcalima. Pretpostavljeno gibanje interferometra postavljenog na Zemlji) je u smjeru izvora svjetlosti. Interferometar se može zakrenuti za 90 o tako da svjetlost dolazi iz nekog drugog izvora okomito na smjer gibanja interferometra. Odgovor na pitanje o postojanju etera je došao iz glasovitog eksperimenta koji su Michelson i Morley izveli 887. godine. Oni su iskoristili činjenicu da, zbog rotacije Zemlje oko vlastite osi i njena gibanja oko Sunca, svaka točka na površini Zemlje ima neku trenutnu brzinu. Pomoću interferometra prikazanog na slici. osmislili su mogućnost usporedbe brzine svjetlosti duž smjera gibanja aparature zraka ) i okomito na taj smjer zraka 2). Na detektor dolazi superpozicija dviju zraka koje interferiraju. Kad se interferometar zakrene za 90 o, zamijene se uloge dviju zraka u odnosu na smjer gibanja aparature. Michelson i Morley su ustanovili da se zakretanjem interferometra nije promijenila interferencija na detektoru, što je značilo da brzina svjetlosti ima jednak iznos u referentnom sustavu koji se giba duž smjera zrake svjetlosti kao i u referentnom sustavu koji se giba okomito na smjer The Experiments on the relative motion of the earth and ether have been completed and the result decidedly negative. The expected deviation of the interference fringes from the zero should have been 0.40 of a fringe the maximum displacement was 0.02 and the average much less than 0.0 and then not in the right place. As displacement is proportional to squares of the relative velocities it follows that if the ether does slip past the relative velocity is less than one sixth of the earth s velocity. Slika.2: Michelson Morleyevi rezultati. Gornja puna linija predstavlja mjerenja u podne, donja uvečer. Teorijska predvidanja uz postojanje etera prikazana su crtkano. Bitno je primijetiti da su dva tipa linija nacrtana na drugačijim skalama: crtkane krivulje smanjene su 8 puta kako bi stale na sliku.
3 .2 Einsteinovi postulati i Lorentzove transformacije Albert Einstein je 905. godine generalizirao tvrdnju koju su postavili Michelson i Morley kao valjanu za promatranje svih ostalih fizikalnih procesa, a ne samo svjetlosti. On je izgradio novu teoriju relativnosti koja počiva na dva postulata. Prvi Einsteinov postulat: Svi fizikalni zakoni vrijede jednako u svim inercijalnim sustavima. Drugi Einsteinov postulat: Brzina svjetlosti jednaka je u svim inercijalnim sustavima. Ovi se postulati odnose na posebnu specijalnu) teoriju relativnosti koja obraduje pojave u inercijalnim sustavima. Za razmatranje pojava u neinercijalnim sustavima, Einstein je kasnije uveo opću teoriju relativnosti. Pokušajmo odrediti jednadžbe za transformaciju kinematičkih veličina iz jednog inercijalnog sustava u drugi s time da budu zadovoljeni Einsteinovi postulati. U tu je svrhu na slici.3 prikazan jednostavan slučaj dvaju sustava S i S kojima se osi x i x poklapaju, a osi y i y su paralelne, te isto tako i osi zi z. Sustav S giba se relativnom brzinom V u smjeru osi x. Radi jednostavnosti, računajmo vrijeme u odnosu na trenutak kada se sustavi poklope, tj. taj trenutak proglasimo za t t 0. Razmatrat ćemo najprije transformacije koordinata dogadaja, a potom trensformacije brzina i akceleracija iz jednog inercijalnog sustava u drugi..2. Transformacije koordinata dogadaja Koordinate nekog dogadaja su uvijek relativne, tj. moramo prvo odabrati neki dogadaj u odnosu na kojeg ćemo potom utvrdivati koordinate drugih dogadaja. Zgodno je kao osnovni dogadaj odabrati poklapanje ishodišta O i O u t t 0. Uzmimo da se drugi dogadaj ostvario u točki A. Moramo sada vidjeti kako promatrači u dvama sustavima utvrduju mjesto i vrijeme tog drugog dogadaja. Za promatrača u sustavu S, dogadaj se zbio na udaljenosti x od ishodišta O u trenutku t, tj. za promatrača u sustavu S protekao je interval Slika.3: U odnosu na inercijalni referentni sustav S, postavljen je drugi inercijalni sustav S koji se giba relativnom brzinom V duž osi x. Dva se sustava podudaraju u odabranom trenutku t t 0. vremena t od trenutka preklopa dvaju sustava do dogadaja u točki A. Za promatrača u sustavu S, isti se dogadaj zbio na udaljenosti x od ishodišta O u trenutku t, tj. za njega je od preklopa dvaju sustava pa do dogadaja u točki A protekao interval vremena t. Primijetimo da smo dozvolili da različiti vremenski interval proteče izmedu dva dogadaja u dva sustava, što nije uobičajeno u Newtonovskoj mehanici. Razlog tome uskoro ćemo vidjeti. Želimo naći jednadžbe transformacije koje povezuju veličine x, t) s veličinama x, t ). Ako ih nademo, možemo ih iskoristiti tako da u slučaju kada su nam poznate veličine x, t), koje označavaju mjesto i vrijeme nekog dogadaja kako ga vidi promatrač u sustavu S, možemo izračunati veličine x, t ) koje označavaju mjesto i vrijeme istog dogadaja kako ga vidi promatrač u sustavu S. Takoder želimo da tražene jednadžbe transforma-
4 cije zadovoljavaju uvjet o jednakosti brzine svjetlosti u oba referentna sustava. U tu svrhu povežimo dva dogadaja svjetlosnim signalom tj. neka se drugi dogadaj desi u oba sustava u nekom trenutku i u nekoj koordinati u kojoj je taman tad svjetlosni signal koji je krenuo iz ishodišta u trenutku prvog dogadaja). Stoga, odabiremo da je u trenutku t t 0 bljesnula iskra na mjestu gdje su se poklopila ishodišta O i O, a drugi dogadaj predstavlja dolazak svjetlosnog signala u točku A. Isprobajmo najprije Galileijeve transformacije. Ako su nam poznate veličine x, t), mogli bismo izračunati veličine x, t ) putem jednadžbi x x V t.2) t t.3) Lako je provjeriti da Galileijeve transformacije ne udovoljavaju zahtjevu o jednakosti brzine svjetlosti u dvama referentnim sustavima. Naime, za promatrača u sustavu S svjetlosni signal je prevalio put x u vremenu t, pa je za njega brzina svjetlosti x t c.4) Isti svjetlosni signal je za promatrača u sustavu S prevalio put x u vremenu t, pa je za njega taj signal putovao brzinom x t c.5) Ako se ove relacije uvrste u Galileijevu transformaciju.), dobivamo c t c t V t.6) Uvažavajući još i drugu Galileijevu transformaciju.2), po kojoj vrijeme teče jednako u oba inercijalna sustava, nalazimo rezultat c c V.7) Vidimo da Galileijeve transformacije nisu prihvatljive jer predvidaju da bi promatrači u dva inercijalna sustava opažali različite brzine istoga svjetlosnog signala. Otvorimo sad mogućnost općenitih linearnih transformacija kojima iz poznatih veličina x, t) nekog dogadaja u sustavu S izračunavamo veličine x, t ) istoga dogadaja videnog u sustavu S : x x + δ t.8) t ɛ x + η t.9) Ovdje su, δ, ɛ i η neke konstante koje tek trebamo odrediti uvažavajući postulate posebne teorije relativnosti. Napomena: Očito je da bi se ove općenite linearne transformacije svele na Galileijeve kada bismo za konstante načinili izbor, δ V, ɛ 0 i η. No to bi bio, kako smo vidjeli, pogrešan izbor. Razlog za odabir linearnih transformacija, a ne kvadratičnih ili nekih drugih nelinearnih formi, lako je obrazložiti fizikalnim zahtjevima. Naime, postavimo li točku A na dvostruko veću udaljenost 2x u sustavu S, očekujemo da će svjetlosni signal stići u nju za dvostruko veće vrijeme 2t. Isto tako očekujemo da ćemo i u sustavu S imati udvostručenje na 2x i 2t, a to nam osiguravaju linearne transformacije. Sad ujedno vidimo zašto smo dozvolili da drugi dogadaj u dva sustava ima različite vremenske koordinate. Prije nego primijenimo Einsteinove postulate, možemo ustanoviti da sve četiri konstante, δ, ɛ i η ipak nisu medusobno neovisne. Razmotrimo najprije jednadžbe gibanja ishodišta O gledano iz dvaju sustava. U sustavu S, položaj ishodišta O u proizvoljno odabranom trenutku t, dan je izrazom x V t.0) U sustavu S, ishodište O trajno miruje x 0.) Uvrstimo li ove koordinate u linearnu transformaciju.8), dobivamo 0 V t + δ t δ V.2) Dakle, razmatrajući jednadžbu gibanja za O dobili smo da konstanta δ nije neovisna o, pa je možemo eliminirati iz linearne transformacije tako da pišemo x x V t).3)
5 Ova bi se relacija svela na Galileijevu kada bismo stavili, no to bi bilo pogrešno. Možemo odmah zaključiti da konstanta ne smije biti jednaka jedinici, ali njenu pravu vrijednost tek trebamo odrediti. Razmotrimo sada i jednadžbe gibanja za ishodište O gledano u svakom od dvaju sustava. U sustavu S ishodište O trajno miruje x 0..4) Za promatrača u sustavu S cijeli sustav S se giba brzinom V, pa je položaj ishodišta O u proizvoljnom trenutku t dan izrazom x V t..5) Napomena: Promatrač iz sustava S uvijek mjeri vrijeme t a ne t). Uvrstimo li gornje koordinate u linearne transformacije.3) i.9), dobivamo : V t V t.6) Iz ovih jednadžbi slijedi: t η t..7) η.8) Dakle, razmatrajući jednadžbe gibanja za O, utvrdili smo da ni konstanta η nije neovisna o. Preostale su nam dvije neovisne konstante, tako da jednadžbe transformacije sad možemo pisati u obliku: x x V t).9) t ɛ x + t.20) Preostale dvije konstante ɛ i odredimo koristeći se dvama Einsteinovim postulatima za posebnu teoriju relativnosti. Krenimo od drugog postulata koji utvrduje jednakost brzine svjetlosti u svim inercijalnim sustavima. Dakle, promatrač u sustavu S utvrduje dolazak svjetlosnog signala u točku A, te izračunava brzinu svjetlosti c putem jednadžbe x t c x c t.2) No, i promatrač u sustavu S opaža isti svjetlosni signal i njegov dolazak u točku A, ali izračun izvodi pomoću svojih mjerenja i dobiva opet brzinu c x t c x c t.22) Uvrštavanjem ovih rezultata u linearne transformacije.9) i.20) dobivamo c t c t V t).23) t ɛ c t + t.24) Uvrštavanjem t iz druge jednadžbe u prvu i sredivanjem nalazimo odnos ɛ V.25) Tako smo zahtjevom za jednakošću brzine svjetlosti u oba sustava eliminirali i konstantu ɛ kao neovisnu, te linearne transformacije pišemo sada u obliku: x x V t).26) t t V x).27) c2 Preostalu konstantu možemo odrediti iz prvoga Einsteinova postulata koji utvrduje da su svi inercijalni sustavi ekvivalentni tako da svi fizikalni zakoni imaju isti oblik kada se iskazuju putem veličina koje odgovaraju tome sustavu. To se mora odnositi i na jednadžbe transformacije koje smo gore dobili. One transformiraju veličine iz sustava S u sustav S, pa isti oblik moraju imati i jednadžbe transformacije iz sustava S u S, ali uz zamjenu V V jer se S giba brzinom V prema S. Pišemo, dakle x x + V t ).28) Uvrstimo li u ovu jednadžbu veličine x i t iz.26) i.27) dobivamo x [ x V t) + V t Vc ] 2 x) 2 V 2 ) x.29) Da bi ovaj rezultat bio konzistentan, mora biti ispunjen uvjet
6 2 V 2 ) V 2.30) Dobili smo konstantu koja igra veoma važnu ulogu u jednadžbama relativističke fizike, te ćemo je često upotrebljavati u ovome poglavlju. Ona ovisi samo o omjeru relativne brzine V dvaju inercijalnih sustava i brzine svjetlosti c. Moramo zapaziti da je uvijek. U slučajevima kad je V c, imamo + ), V 2 što je izraz u kojem se često uzima 2 samo prvi član nerelativistička aproksimacija). Do sad smo radi jednostavnosti razmatrali samo dogadaje na osi x odnosno x ). U općenitom slučaju, mjesto i vrijeme dogadaja opisani su veličinama x, y, z, t) za promatrača u sustavu S, te veličinama x, y, z, t ) za promatrača u sustavu S. Medutim, relativno gibanje dvaju sustava duž osi x odnosno x ) nema utjecaja na položaj duž poprečnih osi, pa potpune Lorentzove transformacije glase: x x V t).3) y y.32) z z.33) t t V x).34) c2 Razumije se, relativistička konstanta dana je izrazom.30). Opću uskladenost Lorentzovih transformacija s Einsteinovim postulatima možemo lako provjeriti tako što umjesto točke A na osi x odnosno x ), odaberemo neku proizvoljnu točku P do koje dode svjetlosni signal koji je krenuo od iskre iz ishodišta kada su ona bila poklopljena. U sustavu S svjetlosni signal prevali put r u vremenu t tako da je ispunjen uvjet r c t, odnosno x 2 + y 2 + z 2 t 2.35) Za promatrača u sustavu S isti svjetlosni signal, stigavši u istu odabranu točku, prevali put r nakon vremena t s time da je ispunjen uvjet r c t, odnosno x 2 + y 2 + z 2 t 2.36) Lako se možemo uvjeriti da uvrštavanjem Lorentzovih transformacija iz jednadžbi.3)-.34) u jednadžbu.36) dobivamo upravo odnos koji je zapisan u jednadžbi.35). To vrijedi za bilo koju vrijednost relativističke konstante, dakle za bilo koju vrijednost relativne brzine V jednog sustava prema drugome. Gornje razmatranje zaslužuje još jedan komentar. Promatrač u sustavu S može reći da se svjetlost od upaljene iskre proširila do sfere radijusa r oko njegova ishodišta O nakon isteka vremenskog intervala t. Promatrač u sustavu S opaža pak da se ista svjetlost proširila do sfere radijusa r i to oko njegova ishodišta O, a nakon isteka vremenskog intervala t! Dakle, širenje svjetlosti je ravnopravan dogadaj promatračima iz oba sustava, iako se gibaju relativno jedan u odnosu na drugog! Sve ovo zvuči kao paradoks, no moramo prihvatiti da eksperimentalno utvrdena jednakost brzine svjetlosti u raznim inercijalnim sustavima mijenja naše svakidašnje pojmove o prostoru i vremenu kao odvojenim veličinama, te ideje o apsolutnom prostoru i apsolutnom vremenu. Lorentzove transformacije izravno spajaju prostorne i vremenske koordinate tako da moramo razmišljati u okviru prostor-vrijeme i to za svaki inercijalni sustav zasebno. Dogadaj, koji se za promatrača u sustavu S dogodio na nekoj udaljenosti od njegova ishodišta O u nekome trenutku t, dogodio se za drugog promatrača u sustavu S na nekoj drugoj udaljenosti od njegova ishodišta O, ali i u nekome drugom trenutku t. To vrijedi za svaki dolazak svjetlosnog signala u neku od točaka na sferi oko O, kako to vidi promatrač u sustavu S. Svaki od tih dogadaja dogodio se za promatrača u sustavu S na nekoj novoj udaljenosti od njegova ishodišta O, te u nekome trenutku t koji se razlikuje od t. Sva dosadašnja razmatranja bazirali smo na dogadajima koji se sastoje od dolaska svjetlosnog signala iz ishodišta u neku točku nakon nekog vremenskog intervala. Medutim, veličine x, t) mogu se odnositi na bilo koji dogadaj. Naprosto, promatrač u sustavu S opazi na udaljenosti x od svog ishodišta O da se u nekome trenutku t dogodio neki dogadaj. Sigurno i promatrač u sustavu S može opaziti isti dogadaj, no pitanje je jesu li vrijednosti x, t ) koje taj promatrač izmjeri takve da ih se može povezati s veličinama x, t) putem Lorentzovih transformacija.3) i.34). Odgovor na postavljeno pitanje je potvrdan. U to se možemo jednostavno uvjeriti na sljedeći način. Odaberimo proizvoljno koordinatu x kao mjesto ne-
7 kog dogadaja, te vrijeme t kada se dogadaj dogodio. Razmotrimo najprije 2 dogadaja za koje je to vrijeme puno veće nego što je potrebno da svjetlosni signal dode iz ishodišta O do položaja x. Možemo zamisliti da je kroz to vrijeme svjetlosni signal putovao od ishodišta O do nekog udaljenog položaja x za vrijeme t, te se na tome mjestu reflektirao na zrcalu i zatim putovao natrag u trajanju t 2 do mjesta x. Tako se konačni dogadaj dogodio u trenutku t t + t 2. Sigurno mora biti x c t, te x x x 2 c t 2. Sada možemo primijeniti Lorentzove transformacije na zamišljene medukorake. Dolazak svjetlosti do zrcala ostvario se za promatrača u sustavu S na položaju u trenutku x x V t ).37) t t V x ).38) Razmatrajući put svjetlosti nakon refleksije na zrcalu, uvidamo da se taj proces odvija analogno kretanju svjetlosnog signala iz ishodišta prema negativnom smjeru osi x dok ne stigne na položaj x 2 nakon isteka vremenskog intervala t 2. Za promatrača u sustavu S, taj bi položaj bio a trenutak bi bio x 2 x 2 V t 2 ).39) t 2 [ t 2 V ] x 2) Zbrajajući jednadžbe.37) i.39) dobivamo.40) x x 2 [x x 2 ) V t + t 2 )].4) Napomena: Moramo uočiti da u jednadžbi.39) nije zamijenjeno t 2 t 2, tj. vrijeme teče u pozitivnom smislu, samo je zamijenjeno x 2 x 2 jer opisujemo proces širenja svjetlosti duž negativnog smjera osi x. Stoga se u jednadžbi.4) pojavljuje x x 2 ), ali t + t 2 ). Zbrojimo još jednadžbe.38) i.40) tako da pišemo t + t 2 [t + t 2 ) V x x 2 )].42) Možemo sada identificirati u sustavu S veličine x x x 2 i t t +t 2 kao položaj i vrijeme utvrdenog dogadaja, te analogno veličine x x x 2 i t t + t 2 kao položaj i vrijeme istoga dogadaja u sustavu S. Jednadžbe.4) i.42) svode se upravo na Lorentzove transformacije x x V t).43) t t V x).44) c2 Preostaju nam još dvije opcije. Prva je kad je vremenski interval izmedu dogadaja točno jednak vremenskom intervalu da svjetlost doputuje od prvog do drugog dogadaja, no takvu smo opciju već razmotrili kad smo izvodili Lorentzove transformacije. Konačno, preostaje opcija u kojoj su dogadaji dovoljno prostorno daleko da se ne mogu povezati svjetlosnim signalom. Dogadaji koji su toliko udaljeni nazivaju se prostorno povezanim dogadajima i može se pokazati da se i oni mogu povezati Lorentzovim transformacijama. Za prve dvije opcije koje se nazivaju vremenski povezani dogadaji i svjetlosni povezani dogadaji) uvijek postoji Lorentzova transformacija koja dva dogadaja može prostorno povezati, tako da u nekom sustavu izgleda da se dese u istoj točki, a za treću opciju uvijek postoji transformacija koja ta dva dogadaja može vremenski povezati, tako da u nekom sustavu izgleda da se dese u istom trenutku. Detaljna analiza treće opcije izlazi van okvira ove skripte, no možemo reći da Lorentzove transformacije vrijede univerzalno za bilo koji dogadaj. One povezuju koordinate istog dogadaja u dva inercijalna sustava. Neke primjene Lorentzovih transformacija Medu najzanimljivijim primjenama Lorentzovih transformacija navest ćemo fenomen koji je dobio naziv kontrakcija dužine i fenomen dilatacije vremena. Pravilno tumačenje tih fenomena pomaže u razumijevanju naravi teorije relativnosti. Kontrakcija dužine. Zamislimo štap koji miruje položen duž osi x sustava S. Promatrač u tome sustavu može utvrditi duljinu štapa tako da izmjeri položaje njegovih krajeva kao x i x 2, pa je L x 2 x. To mjerenje moramo shvatiti kao dva dogadaja u sustavu S. Naime, promatrač u
8 Da bismo mogli usporediti rezultate mjerenja dvaju promatrača moramo zamisliti da se oba mjerenja zapravo zasnivaju na utvrdivanju jednog te istog para dogadaja na krajevima štapa s time da svaki promatrač utvrduje koordinate tih dogadaja na svoj način. Za dogadaj na jednome kraju štapa vrijede Lorentzove transformacije x x + V t ).45) t t + V x ).46) Slika.4: a) U referentnom sustavu S, štap miruje i promatrač utvrduje njegovu duljinu L. Mjerenja položaja njegovih krajeva ne moraju se izvesti istodobno. b) U referentnom sustavu S štap se giba brzinom V. Promatrač u tome sustavu mora istodobno utvrditi položaje oba kraja štapa. Po njegovoj izmjeri, štap ima duljinu L. sustavu S utvrduje da se jedan kraj štapa nalazio na položaju x u trenutku t, što je dogadaj s koordinatama x, t ), a drugi je kraj štapa bio na položaju x 2 u trenutku t 2, što je dogadaj s koordinatama x 2, t 2 ). Pri tome, trenutak t ne mora biti isti kao i t 2 jer štap ionako miruje u sustavu S, pa je jedan njegov kraj uvijek na položaju x, a drugi je uvijek na položaju x 2, tako da trenuci utvrdivanja tih položaja nisu bitni za ishod mjerenja. Prikaz štapa koji miruje u sustavu S dan je na slici.4a. Postavlja se pitanje kako će promatrač u sustavu S izmjeriti duljinu istoga štapa koji se za njega kreće brzinom V. Prikaz se nalazi na slici.4b. Da bi mjerenje koje izvodi taj promatrač bilo ispravno, on mora položaje oba kraja štapa odrediti istodobno. Dakle, on će utvrditi dva dogadaja s koordinatama x, t ) i x 2, t ), gdje je t neki proizvoljno odabrani trenutak, zajednički za oba dogadaja. Za promatrača u sustavu S, štap će imati duljinu L x 2 x. Ovdje smo primijenili transformacije iz sustava S u sustav S, koji se u odnosu na S giba brzinom V. Stoga u zagradama stoji +, a ne kao u jednadžbama.43) i.44). Ovdje smo namjerno odabrali transformacije koje opisuju koordinate u S pomoću koordinata u S kako bi lakše primijenili uvjet istodobnosti u S. I za dogadaj na drugome kraju štapa možemo upotrijebiti Lorentzove transformacije x 2 x 2 + V t ).47) t 2 t + V x 2).48) Primjenjujući Lorentzove transformacije, uvaženo je da dogadaji u sustavu S moraju biti istodobni jedan trenutak t ), dok se u sustavu S ti dogadaji mogu dogoditi u različitim trenucima budući da štap u tome sustavu miruje. Upravo jednadžbe.46) i.48) pokazuju da istome trenutku t odgovaraju dva različita trenutka t i t 2, koja ovise o dva različita položaja x i x 2. Sad možemo izračunati iz jednadžbi.45) i.47) x 2 x x 2 x ).49) Prema tome, ako promatrač u sustavu S izmjeri duljinu L štapa koji miruje, promatrač u sustavu S izmjerit će duljinu istoga štapa L L.50) Najveću duljinu štapa mjeri promatrač u sustavu u kojemu taj štap miruje. Kažemo da je to vlastita duljina štapa. U svim sustavima u kojima se štap uzdužno giba, promatrač mjeri neku manju duljinu štapa, pa je taj fenomen nazvan kontrakcijom štapa u gibanju. Što se štap giba brže, to je njegova duljina za promatrača kraća.

9 Slika.5: Shematski prikaz zamišljenog Einsteinovog eksperimenta s gledišta osobe na platformi. Relativnost istodobnosti. Bitno je razjasniti što znači da su dva dogadaja istodobna u S, jer je to uvijek predmet konfuzije. Da bi se olakšalo razumijevanje, zamislimo situaciju iz stvarnog života u kojoj imamo 3 osobe, A, B i C poredane na liniji. Osoba B nalazi se izmedu A i C, no puno je bliže osobi A nego osobi C. Sve tri osobe miruju. U nekom trenu osoba C vikne i zvuk se krene širiti prema osobi B. Osoba A vikne nešto kasnije, točno tako da zvuk od nje i osobe C stignu u istom trenu do osobe B. Osoba B sad može razlikovati 3 dogadaja: trenutak kad vikne osoba C, trenutak kad vikne osoba A i trenutak kad zvukovi stignu do nje. Jasno je da će tvrditi da su zvukovi stigli istodobno, no to ne znači i da su osoba A i C viknule istodobno, što je česta zamka u koju se upada u razmišljanju! Ovdje postoji jasni vremenski poredak dogadaja: prvo vikne C, zatim vikne A, zatim oba zvuka stignu do B. Razmotrimo sad situaciju sa svjetlosti u poznatom Einsteinovom zamišljenom eksperimentu. 2 osobe vezane su za 2 sustava. Jedna osoba nalazi se na platformi, a druga u sredini vlaka koji prolazi stalnom brzinom pokraj platforme. U trenutku kad se poklope položaji dviju osoba, mjereno od osobe na platformi, u prednji i stražnji kraj vlaka istovremeno udare 2 munje. Ovo je postavka naše situacije, tj. mi zahtjevamo da mjereno izvana obje munje vani, a ne u vlaku) udare u koordinate kraja i početka vlaka istovremeno. Situacija je shematski prikazana na gornjem dijelu slike.5. Razjasnimo najprije kako osoba na platformi smatra da su udari munji istovremeni. Signali od munja stignu do osobe istovremeno, kao i u slučaju eksperimenta sa zvukom. No, ovdje imamo dodatni uvjet koji nalaže da se oba udara dese na istoj udaljenosti od promatrača na platformni. Stoga, on može zaključiti da su se stvarno desili istovremeno, jer su signali od udara proputovali jednake udaljenosti. Pogledajmo sad što vidi osoba u vlaku, ako znamo kako dogadaj izgleda osobi na platformi. Kako se vlak giba prema prednjem svjetlosnom signalu, osoba na vlaku će prvo vidjeti taj signal srednji dio slike), a tek kasnije signal od udara u stražnji dio. Obje osobe slažu se da su se udari desili na početku i na kraju vlaka, kao i da je osoba
10 na vlaku prvo vidjela prednji signal. No, interpretacija tih dogadaja je različita s različitih gledišta. Osobi na platformi oba se dogadaja dese istovremeno jer su signali stigli istovremeno s jednako udaljenih mjesta. Osobi u vlaku oni se ne dese istovremeno jer zaključuje da su signali stigli s jednako udaljenih mjesta, ali prvo uoči prednji, a tek kasnije zadnji! Kad odračuna vrijeme putovanja signala s obje strane vlaka brzinom c), ta osoba zaključuje da se prednji udar desio prije udara u stražnji dio. U dobiveno se možemo uvjeriti i razmatranjem Lorentzovih transformacija. Neka je sustav S vezan za promatrača na platofrmi. Prema postavkama problema, udari gromova u njegovom sustavu predstavljaju dva dogadaja koji se dese na različitim koordinatama, ali u istom trenutku. Stoga ćemo za te dogadaje postaviti t t 2 t. Odaberimo dalje da se ishodišta sustava oba promatrača poklapaju u trenutku t t 0. Za promatrača na platformi to je ujedno i trenutak kad gromovi udare u krajeve vlaka pa vrijedi da je t t 2 0. Prostorno-vremenske koordinate udara gromova u krajeve vlaka dane su u sustavu S s: x, y, z, t ) L/2, 0, 0, 0).5) x 2, y 2, z 2, t 2 ) L/2, 0, 0, 0).52) pri čemu je L duljina vlaka mjerena u sustavu promatrača na platformi. U sustavu S vremenske koordinate istih dogadaja možemo dobiti iz Lorentzovih transformacija: t t V x ) LV 2.53) t 2 t 2 V x 2) LV 2..54) Vidljivo je da se dogadaji ne dese u istom trenutku u sustavu vezanom uz promatrača u vlaku, bez obzira na detalje oko veze vlastite duljine vlaka i duljine L koju mjeri promatrač na platformi. Uz to, vidljivo je i da se u sustavu S dogadaj 2 udar groma u prednji dio vlaka) u ovoj konfiguraciji uvijek desi prije dogadaja. Instruktivno je zapitati se kako bi situacija izgledala osobi na platformi da smo postulirali da se dva svjetlosna signala pošalju s krajeva vlaka istovremeno, ovaj put mjereno u sustavu vlaka. To možemo zamisliti da se desi tako što se u vlaku, mjereno od promatrača koji sjedi u njegovu centru, istovremeno na oba kraja vlaka proizvedu 2 iskre. Tad bi zahtjevali da je t t 2 i nužno bi ispalo da ti dogadaji nisu istovremeni osobi na platformi. Vama se ostavlja da zaključite koji je vremenski poredak ta 2 dogadaja promatrano u sustavu vezanom za platformu. Dilatacija vremena. Razmotrimo sad malo detaljnije kako se odreduje vremenski interval izmedu dva dogadaja. Neka su se u sustavu S dva dogadaja dogodila na istome mjestu, ali u različitim vremenskim trenucima, tako da su koordinate tih dogadaja x, t ) i x, t 2 ). Za promatrača u tom sustavu, izmedu dva dogadaja protekao je interval vremena t t 2 t. Ako te iste dogadaje opaža promatrač u sustavu S, za njega se oni nisu dogodili na istome položaju u odnosu na njegovo ishodište, a i vremenski trenuci su drugačiji. Za prvi dogadaj vrijedi a za drugi dogadaj x x V t ).55) t t V x).56) c2 x 2 x V t 2 ).57) t 2 t 2 V x).58) c2 Položaji dogadaja u sustavu S ovise o vremenskim trenucima t i t 2 kako ukazuju jednadžbe.5) i.53). Ponovno smo primjenili transformacija u kojima je lako primijeniti uvjet problema, u ovom slučaju da se dva dogadaja dese na istom mjestu. Interval vremena izmedu dogadaja lako izračunavamo iz jednadžbi.56) i.58) t t 2 t t 2 t ) t.59) Dakle, najkraći interval vremena izmedu dva dogadaja mjeri onaj promatrač za kojega su se ta dva dogadaja dogodila na istom mjestu. Taj se interval često naziva vlastiti interval dvaju dogadaja. Za promatrače u drugim inercijalnim sustavima u kojima su se ti dogadaji dogodili na različitim položajima, vremenski interval izmedu tih dogadaja je dulji. Razumije se, što je razmak izmedu položaja veći, to je zabilježeni interval vremena izmedu dogadaja dulji. Taj je fenomen nazvan dilatacijom vremena.
11 smjerovima, a mi crtamo samo onu zraku koja nas zanima. U konačnom trenutku, zrcalo se nalazi iznad položaja x 2, pa je: x x 2 V t.6) Iz geometrijskih odnosa na slici.6b, te činjenice da se i u sustavu S svjetlost širi brzinom c, slijedi x x 2 2 ) 2 ) t + y ) 2 Uvrštavajući jednadžbe.60) i.6) u jednadžbu.62) dobivamo nakon sredivanja t t.63) To je isti rezultat kao u jednadžbi.59)..2.2 Dopplerov efekt za svjetlost Slika.6: a) U sustavu S svjetlosni signal se nakon vremenskog intervala t vrati na isto mjesto odakle je krenuo. b) U sustavu S isti se fizikalni proces vidi tako da je svjetlosni signal krenuo iz jednog mjesta x, te je nakon vremenskog intervala t stigao na drugo mjesto x 2. Razmotrimo situaciju u kojoj izvor odašilje pulseve svjetlosti nekom stalnom frekvencijom f 0, mjereno iz sustava izvora, i približava se po pravcu stalnom brzinom prema mirnom promatraču. Na skici je dana situacija u kojoj se vlak približava promatraču na platformi. Zgodno je fenomen dilatacije vremena ilustrirati jednim primjerom. Na slici.6a prikazan je nastanak iskre u trenutku t na položaju x u sustavu S. Promatramo zraku svjetlosti koja se širi duž osi y i nailazi na postavljeno zrcalo, te se na njemu reflektira i vrati se u trenutku t 2 na isto mjesto gdje je bila bljesnula iskra. Polazak i povratak svjetlosnog signala u sustavu S predstavljaju dva dogadaja koja su se dogodila na istom položaju, a izmedu njih je protekao vremenski interval t 2 y.60) c Promatrač u sustavu S opaža ista dva dogadaja na način prikazan na slici.6b. Zrcalo na visini y kreće se brzinom V tako da i svjetlosni signal putuje od mjesta x gdje je bljesnula iskra do mjesta gdje će se naći zrcalo nakon vremenskog intervala t /2, a nakon refleksije putuje do mjesta x 2, takoder za vremenski interval t /2. Ako vas zbunjuje da svjetlost putuje u drugačijem smjeru u 2 sustava, sjetite se da svjetlost putuje u svim Slika.7: Shematski prikaz Dopplerovog efekta za svjetlost. Prikazana su 2 trenutka u kojima se iz vlaka odašilje puls svjetlosti. Odredimo frekvenciju koju vidi promatrač ako izvor šalje svjetlosne signale frekvencijom f 0 u svom sustavu i približava se promatraču brzinom u. Na slici su nacrtane dvije fronte svjetlosnih valova koje dolaze do promatrača. Slika je nacrtana u sustavu vezanom uz promatrača. Tijekom vremenskog intervala T nacrtanog na slici izvor se pomakne za ut, a krijesta prvog vala za ct. Valna duljina u sustavu promatrača jednaka je λ ct ut. Valja uzeti u obzir da je period izmedu odašiljanja dvije valne krijeste različit za promatrača na platformi i za promatrača u vlaku. Kako se u vlaku ta 2 dogadaja dese na istom mjestu, vrijedi da je T T 0, pri čemu je T 0
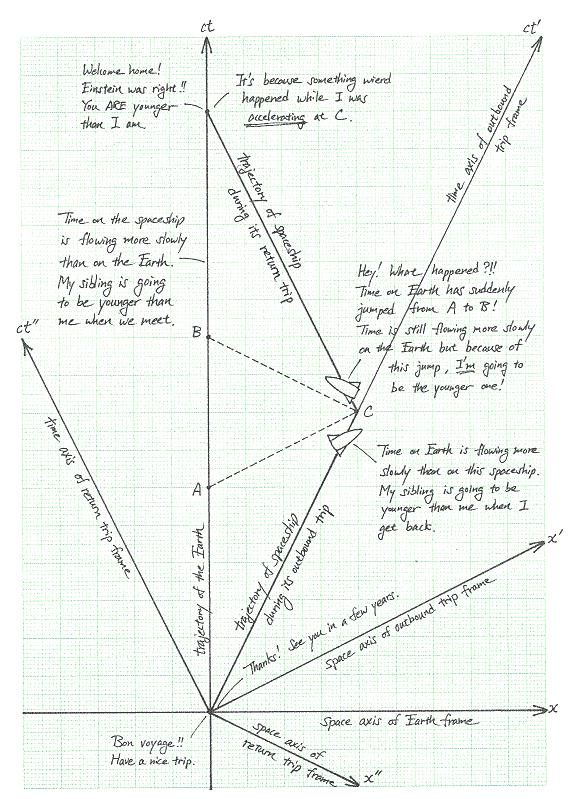
12 period mjeren u sustavu vlaka. Ako uzmemo u obzir definiciju frekvencije svjetlosnog vala, slijedi da promatrač na platformi mjeri: f c λ c c u T c.64) c u T 0 Veza frekvencija jednaka je: f c c u u 2 c + u ct 0 c u f 0..65) Ova se relacija naziva Dopplerov efekt za svjetlost. Rezultat s izmijenjenim predznacima dobije se u slučaju kad se izvor udaljava od promatrača. Bitno je primijetiti da kako se svjetlost ne giba kroz nikakav medij, ovaj se izraz dosta razlikuje od Dopplerovog efekta za zvuk. U slučaju zvuka valja razlikovati giba li se izvor ili promatrač, zbog toga što medij miruje u odnosu na promatrača. No, kako za svjetlost nema medija, nebitno je tko se giba, već je bitno samo relativno gibanje izvora i promatrača..2.3 Paradoks blizanaca Promotrimo sad slijedeći primjer. Svemirski brod putuje od Zemlje do zvijezde koja je udaljena 20 svjetlosnih godina i miruje u odnosu na Zemlju. Brod se giba brzinom v 0.8c promatrano sa Zemlje. Pretpostavimo da brod trenutno ubrza do dane brzine. Kad dode do zvijezde, trenutno se okrene i istom se brzinom vrati natrag. Promotrimo situaciju putovanja sa gledišta promatrača na Zemlji i promatrača na brodu. Promatrano sa Zemlje, jedini predmet koji se giba jest svemirski brod. Taj brod ima brzinu 0.8c, tj. giba se Lorentzovim faktorom 5/3. Udaljenost koju prevaljuje do zvijezde jednaka je 20 ly ly udaljenost koju svjetlost prevali za jednu godinu u vakuumu). Vrijeme koje je potrebno brodu da dode do zvijezde jednako je t s/v 25 godina. Jednako je vremena potrebno za nazad pa Zemljani vide da je put trajao 50 godina. Promatrano s broda, Zemlja i zvijezda gibaju se s 0.8c, tj. Lorentzovim faktorom 5/3. Udaljenost do zvijezde je kontrahirana i iznosi L L 0 / 2 ly. Kako je udaljenost smanjena, vrijeme koje je potrebno do zvijezde jednako je t 2ly/0.8c5 godina. Jednako je vremena potrebno za nazad pa osobe na brodu vide da je put trajao 30 godina. Tko je u pravu? Koliko su ostarile osobe na brodu, a koliko za Zemlji? Promatrano sa Zemlje, osobama na brodu vrijeme je dilatirano. Oni mogu reći da je na Zemlji prošlo 50 godina do povratka broda, no oni takoder vide da je osobama na brodu prošlo samo t godina zbog dilatacije vremena. To se poklapa s mjerenjima osoba na brodu. S druge strane, nastaje problem kad osobe na brodu pokušavaju primijeniti isto razmišljanje. Oni mogu reći da je vrijeme osobama na Zemlji dilatirano, pa njima prode još manje vremena nego osobama na brodu! Ovaj paradoks naziva se paradoks blizanaca, a postoji nekoliko njegovih razriješenja. Da bi bolje razjasnili primjer, zamislimo da se rode dva blizanca od kojih jedan ostane na Zemlji, a drugi krene putovati do zvijezde. Blizanci stalno pričaju preko Skype-a. Skype je namješten da šalje 60 sličica u minuti, tj. jednu svake sekunde. Pogledajmo kako izgleda video na Zemlji, a kako na svemirskom brodu. Promotrimo situaciju na ekranu na Zemlji. Promatrač na Zemlji vjeruje da je brod stigao do zvijezde nakon 25 godina. No, on to ne vidi odmah na ekranu zato što signalu od zvijezde gdje se sad nalazi svemirski brod) treba još 20 godina da stigne natrag do Zemlje. Signal ne stiže trenutno jer putuje natrag konačnom brzinom, brzinom svjetlosti. Dakle, promatrač na Zemlji vjeruje da je njegov brat stigao do zvijezde nakon 25 godina, ali to vidi tek godina nakon polaska broda. Ako brat na Zemlji gleda vrijeme koje je prikazano njegovu bratu na ekranu, vidjet će da je njemu prošlo samo 5 godina zbog dilatacije vremena sjetimo se, s bratovog gledišta potrebno je 5 godina do zvijezde, u njegovom sustavu zbog kontrakcije duljine puta). Možemo se uvjeriti u ispravnost ovog rezultata pomoću Dopplerove formule. Ta formula uključuje u sebi dilataciju vremena kao i primicanje/odmicanje izvora, tako da mora reporoducirati ovaj rezultat. Frekvencija sličica na Skypeu koju prima osoba na Zemlji jednaka je: f c u c + u f 0,.66) što uz u 0.8c daje f f 0 /3 i potvrduje naš rezultat jer je prošlo 45 godina kako bi osoba na Zemlji vidjela da je prošlo 5 godina, što je faktor /3). Sad se brod okrene i krene prema Zemlji. Zemljanin na ekranu vidi da je prošlo 5 godina, a njemu
13 je prošlo 45 godina. Njegov se brat vrati s brodom nakon još 5 godina jer je ukupno trajanje puta mjereno sa Zemlje 50 godina), a na ekranu ostari još 5 godina jer ukupno ostari 30 godina u svom sustavu). Ovaj novi omjer prolazaka vremena, tj. frekvencija sličica na Skypeu ponovno se poklapa s Dopplerovom formulom. Provedimo kratku analizu i za brata koji je na brodu. Njemu treba 5 godina do zvijezde. Na ekranu vidi da je prošlo 5 godina. Razlog je jednostavan. Ako su Zemlja i zvijezda udaljeni 20 svjetlostnih godina, signalu treba toliko vremena od Zemlje do zvijezde. Mjereno sa Zemlje, signal koji je odaslan sa Zemlje 5 godina nakon početka putovanja, do zvijezde stigne nakon još 20 godina i tamo se susretne s brodom, za kojeg znamo da putuje 25 godina. Osobi na brodu, koja se udaljava od Zemlje, sličice na Skypeu stižu frekvencijom koja je 3 puta manja od frekvencije na Zemlji 5/5), ponovno u skladu s Dopplerovim efektom. Kad se brod okrene, desi se vrlo čudna stvar. Situacija se može razmatrati na 2 načina. Prvi je da se brod stvarno okrene, no tad on više ne predstavlja inercijalni sustav i ne mogu se primijeniti jednakosti specijalne teorije relativnosti, već se mora priskočiti općoj teoriji relativnosti. Znanstvenici su htjeli zadržati paradoks blizanaca bez uvodenja ubrzanja pa su smišljali druge scenarije s istom posljedicom. Jedna ideja je da se brod koji ide prema zvijezdi prilikom dolaska do tamo susretne s drugim brodom koji ide istom brzinom natrag prema Zemlji. Oni izmjene informacije o Zemljanima i svaki nastavi svoj put. Problem koji se tu pojavljuje je nemogućnost uskladivanja njihovih satova. Osobe u dva broda ne mogu se nikako dogovoriti koji je trenutno trenutak na Zemlji! Koliko god to paradoksalno izgledalo, može se pokazati pomoću tzv. Minkowski dijagrama, no to izlazi van okvira ove skripte. Za one koji žele znati više, na kraju je priložen dijagram ovog problema u kojem se pojavljuje diskontinuitet u simulatanosti za brod koji putuje prema zvijezdi i onaj koji putuje prema zemlji. Na toj slici, osobe koje putuju prema zvijezdi tvrde da je na zemlji ovog trena trenutak A, a osobe koje putuje prema Zemlji kažu da je trenutak B. U zaključku, osobe u brodu moraju u jednom trenu biti u neinercijalnom sustavu. Oni ne mogu primjenjivati rezultate specijalne teorije relativnosti pa ne mogu tvrditi da je Zemljanima dilatirano vrijeme barem u trenutku zakretanja)..2.4 Transformacije brzina Nakon što smo upoznali Lorentzove transformacije koje se odnose na mjesto i vrijeme dogadaja, možemo se zapitati kako se u relativističkoj fizici opisuje općnito gibanje tijela. Krenimo od razmatranja brzine kao osnovne kinematičke veličine. Pretpostavimo da promatrač u inercijalnom sustavu S utvrdi da se neka čestica giba duž osi x brzinom v x, te se pitamo koliku će brzinu v x izmjeriti promatrač u S gledajući to isto gibanje. Problem možemo ispravno riješiti ako ga svedemo na utvrdivanje dva dogadaja. Neka je prvi dogadaj nalaženje čestice na nekome položaju x u trenutku t, a drugi dogadaj nalaženje te čestice na položaju x+ x u trenutku t+ t. Brzinu u sustavu S utvrdujemo na poznati način v x x + x) x t + t) t x t d x d t.67) Ako se sad stavimo u ulogu promatrača u sustavu S, nalazimo da se prvi dogadaj dogodio na položaju x u trenutku t, a te su koordinate povezane s onima iz sustava S putem Lorentzovih transformacija x x V t).68) t t V x).69) c2 Drugi se dogadaj za promatrača u sustavu S dogodio na položaju x + x u trenutku t + t. I ove koordinate možemo putem Lorentzovih transformacija povezati s onima iz sustava S x + x [x + x) V t + t)].70) t + t [t + t) V t + t)].7) c2 Prema tome, promatrač u sustavu S može izračunati brzinu čestice v x x + x ) x t + t ) t [x + x) V t + t)] x V t) [t + t) V t + t)] t V x) x V t t V x x t V V x t.72)
14 Konačan rezultat za transformaciju brzine glasi v x v x V V v x.73) Ova relacija je egzaktna za sve brzine v x koje neka čestica može imati, te za bilo koju relativnu brzinu V izmedu dva inercijalna sustava. Kod brzina koje su mnogo manje od brzine svjetlosti v x c, V c), vidimo da se relacija.73) svodi jednostavno na Galileijev izraz v x v x V. Dakle, u svim nerelativističkim slučajevima na koje smo navikli u svakodnevnom životu, vrijedi u dobroj aproksimaciji Galileijeva transformacija za brzine. Zanimljivo je razmotriti drugi ekstrem u primjeni relacije.73). Uzmimo foton kvant svjetlosti) kao česticu koja se giba brzinom c u sustavu S. Za promatrača u sustavu S, brzina fotona je v x c V V c.74) c Vidimo da relativistički izraz za transformaciju brzina daje očekivani rezultat i u slučaju fotona. Bez obzira na iznos relativne brzine V izmedu dva inercijalna sustava, foton ima uvijek istu brzinu c. To je najzgodnija potvrda konzistentnosti izraza.73) s drugim postulatom posebne teorije relativnosti. Razmotrimo sada općenitiji slučaj u kojem se čestica giba istodobno duž osi x i duž osi y, tako da za promatrača u sustavu S ona ima komponente brzine v x i v y. Pitanje je kolike su komponente brzine te čestice za promatrača u sustavu S. Problem moramo opet rješavati pozivanjem na dva dogadaja. Prvi dogadaj predstavlja nalaženje čestice u sustavu S na položaju x, y) u trenutku t. Za promatrača u sustavu S, isti se dogadaj dogodio na položaju x, y ) u trenutku t x x V t).75) y y.76) t t V x).77) c2 Drugi dogadaj predstavlja nalaženje čestice na položaju x+ x, y+ y) u trenutku t+ t. Za promatrača u sustavu S, isti se dogadaj dogodio na položaju x + x, y + y ) u trenutku t + t. Lorentzove transformacije nam daju x + x [x + x) V t + t)].78) y + y y + y.79) t + t [t + t) V x + x)].80) c2 Možemo izračunati komponentu brzine duž osi x. Postupak je identičan onome iz jednadžbe.72), pa je i rezultat kao u jednadžbi.73). Razlog leži u činjenici što x i t ne ovise o y. Izračunajmo sad komponentu brzine duž osi y v y y + y ) y t + t ) t y + y) y [t + t) Vc ] 2 t + t) t V x ) y t Vc ).8) 2 x Konačni rezultat glasi v y v y V v x ).82) Možemo uočiti da v y ovisi ne samo o v y, nego i o v x, a razlog leži u tome što t ovisi o x. Da bismo kompletirali Lorentzove transformacije za brzine, navedimo još i slučaj kada postoji brzina čestice duž osi z. Iz simetrije problema uvidamo da se gibanje duž osi z ne razlikuje od onoga duž osi y jer su oba u ravnini okomitoj na os x duž koje postoji pretpostavljeno relativno gibanje dvaju inercijalnih sustava. Stoga vrijedi transformacija v z v z V v x Primjena na slučaj gibanja duž osi y ).83) Neka se u sustavu S čestica giba samo duž osi y kako pokazuje slika.8a, tj. neka je v x 0, a v y 0. Budući da se sustav S giba brzinom V u odnosu na sustav S, onda i čestica mora imati brzinu v x V za promatrača u sustavu S. Uz to, čestica ima i neku brzinu v y kako prikazuje slika.8b.
15 veći iznos brzine čestice nego što to opaža promatrač u sustavu S. Zanimljivo je na kraju provesti analizu za brzinu fotona u istim okolnostima. Ako se u sustavu S foton giba duž osi y, komponente negove brzine su v x 0 i v y c. Lorentzove transformacije za brzinu daju v x v x V V v x V.87) v y v y V ) c v x.88) Zbog >, komponenta brzine duž osi y je umanjena v y < c), ali je ukupni iznos brzine za promatrača u sustavu S Slika.8: a) U referentnom sustavu S čestica se giba duž osi y brzinom v y. b) Promatrač u sustavu S opaža da ista čestica ima komponente brzine v x V i v y, što daje ukupnu brzinu v. Formalnom primjenom Lorentzovih transformacija za brzine, nalazimo v x v x V V V.84) v x v v 2 x + v 2 y V 2 + c2 V 2 + V 2 ) 2 c.89) Dobili smo opet očekivani rezultat u skladu s drugim postulatom posebne teorije relativnosti. Videnje promatrača u dvama referentnim sustavima prikazano je na slici.9. v y v y V ) v y v x.85) Zbog > dobivamo v y < v y, tj. za promatrača u sustavu S čestica ima manju komponentu brzine duž osi y. Medutim, izračunavajući ukupnu brzinu čestice za promatrača u sustavu S v v 2 x + v 2 V 2 + v 2 y y V 2 + v2 y V 2 ) v 2 y + V 2 v2 y 2 ) > v y.86) nalazimo da promatrač u sustavu S uvijek opaža Slika.9: Brzine istog fotona videne u dvama inercijalnim sustavima. Izračunavanje transformacija brzine putem diferenciranja Nakon što smo na elementaran način izveli izraze.73) i.82) za transformaciju brzina iz jednog
16 inercijalnog sustava u drugi, te stekli pouzdanje kroz njihovu primjenu, možemo pokazati matematički elegantniji izvod putem diferenciranja. Potražimo diferencijale u Lorentzovim transformacijama za položaj i vrijeme iz jednadžbi.30)-.33) dx dx V dt).90) dy dy.9) dz dz.92) dt dt Vc ) 2 dx.93) Uočimo da promjena dx u jednadžbi.82) može nastati zbog promjene dx, ali i zbog promjene dt zbog toga što x u jednadžbi.30) ovisi o dvije neovisne varijable x i t. Analogno zapažanje imamo i za dt. Brzine u sustavu S je sada lako odrediti iz omjera diferencijala v x dx dt dx dt V V dx dt dx V dt dt V dx v x V V v x.94) Dobili smo isti rezultat kao u jednadžbi.73). Takoder lako nalazimo Pogledajmo kolika je razlika te brzine i brzine svjetlosti u vodi, c n, kako bismo došli do Fizeauovog rezultata: v lab c n c n + v + v nc c n v n 2 + v,.97) nc što se za laboratorijske uvjete, u kojima je v << c, svodi na v lab c n + v ) n 2.98) i poklapa se sa Fizeauovim rezultatom. Vidimo, stoga, da je njegov rezultat posljedica pravilnog zbrajanja brzina, a ne djelomičnog povlačenja nepostojećeg) etera..2.5 Transformacije akceleracija U traženju izraza za transformacije akceleracija najlakše nam je primijeniti postupak diferenciranja. Tako iz izraza za v x dobivamo dv x V dv c x 2 v x 2 V v x ) v x V ) V ) dv x V ) 2 v x ) 2 dv x.99) v y dy dt v y V ).95) v x Diferencijal dt iz jednadžbe.85) možemo napisati u obliku što se podudara s rezultatom.82). Opet možemo primijetiti da ovisnost komponente v y o v x dolazi od člana s dx u izrazu za dt. Objašnjenje Fizeauovog eksperimenta U ovom smo trenutku spremni objasniti rezultat Fizeauovog eksperimenta. Uz pretpostavku da se svjetlost u vodi giba brzinom c n, pri čemu je n indeks loma vode, a voda se giba brzinom v u istom smjeru kao i svjetlost, brzina svjetlosti u odnosu na opažača jednaka je: v lab c n + v + c n v c n + v + v nc.96) dt dt Vc ) 2 dx V ) dx dt dt V ) v x dt.00) Iz omjera gornjih diferencijala dobivamo a x dv x dt dv x 3 V ) 3 v dt x 3 V v x ) 3 a x.0)
17 Pomalo neočekivano, akceleraciju a x u sustavu S ne možemo dobiti poznavajući samo akceleraciju a x u sustavu S, nego je potrebno poznavati i trenutnu brzinu v x. O tome će još biti riječi kasnije kod razmatranja djelovanja sile. Izračunajmo još diferencijal izraza za komponentu brzine v y ) v y dv y V dv c y 2 v x V dv x V ) 2.02) v x Uz to se koristimo izrazom za dt iz jednadžbe.00), te dobivamo a y dv y dt V ) c 2 v V x a y + v y a x 2 V ) 3.03) v x Komponentu akceleracije a y čestice u sustavu S možemo dobiti ako poznajemo obje komponente akceleracije a x i a y u sustavu S, te obje komponente trenutne brzine v x i v y čestice u sustavu S. U posebnom slučaju kada čestica u sustavu S kreće iz položaja mirovanja, tj. kada njena trenutna brzina iščezava v x 0, v y 0), izrazi za transformacije akceleracija poprimaju jednostavnije oblike ) a x a x 3.04) a y a y 2.05) Ovim ćemo se izrazima koristiti kasnije u razmatranju transformacija sile iz jednog inercijalnog sustava u drugi..3 Relativistička dinamika Nakon što smo utvrdili kakve posljedice stvara posebna teorija relativnosti na izraze za transformaciju kinematičkih veličina iz jednog inercijalnog sustava u drugi, možemo se zapitati kako se odvija dinamika u okvirima posebne teorije relativnosti. U traženju odgovora, moramo se čvrsto držati prvoga Einsteinova postulata prema kojemu svi prirodni zakoni moraju biti jednako valjani u svakome inercijalnom sustavu. U klasičnoj nerelativističkoj) mehanici imali smo drugi Newtonov zakon d p F dt kao temeljni zakon dinamike. Možemo se zapitati zadovoljava li taj zakon uvjet koji postavlja prvi Einsteinov postulat, tj. vidi li promatrač u sustavu S isti fizikalni proces u obliku d p F dt. Da bismo to mogli provjerili, morali bismo prethodno poznavati izraze za transformacije pojedinih veličina iz jednog sustava u drugi. No poznata nam je jedino transformacija za vrijeme, dok nam odgovarajuće transformacije za dinamičke veličine p i F nisu poznate. Možemo pokušati i s obrnutim postupkom dokazivanja. Pretpostavimo da drugi Newtonov zakon uistinu vrijedi u svim inercijalnim sustavima, te se zapitajmo je li moguće iz tog uvjeta naći relativističke izraze za transformacije p i F. Odgovor je niječan jer iz jedne jednadžbe koja predstavlja drugi Newtonov zakon nije moguće naći transformacije za dvije dinamičke veličine. Potražimo neki drugi zakon mehanike iz kojega bismo mogli odrediti prvu dinamičku veličinu u relativističkoj formi. U tu bi svrhu moglo biti pogodno razmatranje zakona o očuvanju količine gibanja u zatvorenom sustavu zato što taj zakon ne sadrži drugih dinamičkih veličina. Problem bi se tada sveo na utvrdivanje uvjeta koje mora zadovoljavati relativistička količina gibanja da bi zakon o očuvanju te veličine vrijedio u svim inercijalnim sustavima..3. Relativistička količina gibanja Da bismo došli do relativističkog izraza za količinu gibanja, razmotrimo sraz dviju jednakih kuglica viden u dva inercijalna sustava. Neka u sustavu S sraz izgleda potpuno simetrično kako pokazuje slika.0a. Kuglice imaju jednake mase m, a brzine su im jednake po iznosu, ali suprotnih smjerova. Prije sraza, komponente brzine kuglice A označene su kao v x i v y, dok kuglica B ima komponente brzine v x i v y. Parametri sraza na slici.0a postavljeni su tako da se dodir kugli ostvaruje kada su središta kugli na pravcu paralelnom s osi y, odnosno kada je tangencijalna ravnina paralelna s osi x. U tim uvjetima, kuglice zadržavaju svoje brzine duž osi x i nakon sraza, dok im komponente brzina duž osi y
18 mijenjaju predznak. Ako preuzmemo definiciju količine gibanja iz Newtonove mehanike kao p m v, možemo napisati zakon očuvanja za komponente količine gibanja duž osi y m v y + m v y ) m v y ) + m v y }{{}}{{} prije sraza poslije sraza.06) Zbog simetrije problema, ovaj je zakon zadovoljen s Newtonovom definicijom količine gibanja. Odaberimo sada sustav S koji se u odnosu na sustav S giba brzinom V, koja je upravo jednaka komponenti v x, tako da kuglica A ima samo komponentu brzine duž osi y. Slika.0b prikazuje isti sraz viden u sustavu S. Primijenimo izraze za transformaciju brzine kuglice A prije sraza iz sustava S u sustav S uz izbor V v x v xa v x V V v x 0.07) v ya v v y y V ) v x v y.08) Pritom smo i u relativističkom faktoru zamijenili V s v x. Komponenta brzine v xa iščezava, dok je komponenta brzine v ya veća od v y. Izračunajmo sada i komponente brzine kuglice B prije sraza u sustavu S uz izbor V v x v xb v x V V 2 v x v x) + v2 x v v v y y yb [ V ] v x).09) + v2 x.0) Slika.0: a) Elastičan sraz dviju jednakih kuglica viden u sustavu S gdje su brzine kuglica postavljene simetrično. Gornja slika prikazuje stanje u nekom trenutku prije sraza, a donja slika se odnosi na neki trenutak nakon sraza. b) Sustav S je odabran tako da u njemu kuglica A ima gibanje isključivo duž osi y. Zbog relativističkih transformacija, dvije kuglice nemaju jednake po iznosu brzine duž osi y. Ipak, komponente količine gibanja duž osi y moraju za obje kuglice biti jednake po iznosima da bi i u sustavu S bio zadovoljen zakon očuvanja količine gibanja kao što je zadovoljen u sustavu S. v ya > v yb.) Kuglice nemaju jednake po iznosu brzine duž osi y, iako su bile jednake u sustavu S. To je važna posljedica relativističkih transformacija. Nakon sraza, kuglica A mijenja brzinu v y v y, pa bismo transformirajući novu brzinu u sustav S dobili takoder v ya v ya. Isto vrijedi i za kuglicu B, pa bismo nakon sraza dobili v yb v yb. U pokušaju primjene zakona očuvanja količine gibanja u sustavu S, a uz Newtonovu definiciju količine gibanja, dobili bismo Primjećujemo da je komponenta brzine v yb po iznosu manja od v y. Usporedujući brzine kuglica u sustavu S nalazimo m v ya + m v yb) m v ya) + m v yb }{{}}{{} prije sraza poslije sraza.2) gdje nejednakost nastupa uslijed uvjeta.).
19 S ovim rezultatom stavljeni smo pred izbor izmedu napuštanja zakona očuvanja količine gibanja kao neprihvatljivog u relativističkoj mehanici, ili pak napuštanja Newtonove definicije količine gibanja kao neodgovarajuće za potrebe relativističke mehanike. Kao oslonac u promišljanju, može nam poslužiti prethodno stečeno znanje o kinematičkim veličinama, pa i u razmatranju dinamičkih veličina postavimo zahtjev da kod malenih brzina relativističke veličine postaju približno jednake klasičnima. S tom idejom, odlučimo se zadržati zakon očuvanja količine gibanja i u relativističkoj mehanici, a definiciju relativističke količine gibanja postavimo u obliku p v) v2.6) Što je u nekom referentnom sustavu brzina tijela veća, to je i faktor p v) veći. Napomena: Faktor p ima istu formu kao i relativistički faktor u Lorentzovim transformacijama. Ipak, medu njima postoji bitna razlika. U faktoru nalazimo brzinu V kojom se jedan inercijalni sustav giba prema drugome, dok se u faktoru p nalazi brzina tijela u nekom zadanom referentnom sustavu. p p v) m v.3) pri čemu je uveden neki faktor p v), ovisan o brzini tijela, koji bi za malene brzine morao postati približno jednak jedinici, tj. p v c). Razumije se, ovdje se radi o općoj definiciji količine gibanja smatrajući da tijelo promatramo u nekome referentnom sustavu u kojemu ono ima brzinu v. Zbog izotropnosti prostora, nema razloga da bi faktor p v) ovisio o smjeru brzine, nego samo samo o njenu iznosu v v. Možemo sada zahtijevati da zakon očuvanja količine gibanja bude zadovoljen u slučaju sraza kuglica u sustavu S na slici.0b, tj. da vrijedi Nakon sredivanja dobivamo uvjet p v A) m v ya p v B) m v yb.5) Dakle, komponente količina gibanja duž osi y za dvije kuglice moraju biti medusobno jednake. To je fizikalno jasan uvjet jer se jedino tada svaka kuglica odbije u srazu tako da komponenta količine gibanja duž osi y zadrži isti iznos, ali promijeni predznak. Jednakost komponenti količine gibanja dviju kuglica može se postići jedino tako da faktor p bude veći za onu kuglicu koja ima manju komponentu brzine duž osi y, te obrnuto za drugu kuglicu. Možemo pokazati da zakon očuvanja količine gibanja vrijedi ukoliko se u općoj definiciji relativističke količine gibanja iz jednadžbe.3) postavi Usmjerimo se sada na dokaz uvjeta.5). Možemo ga napisati u obliku v ya v 2 ya v yb v 2 xb + v 2 yb.7) Ovdje smo uvažili da se kuglica A giba samo duž osi y, dok kuglica B ima i komponentu brzine duž osi x, pa se u nazivniku uzima odgovarajući iznos ukupne brzine. U dokazu ćemo krenuti od izraza za kuglicu B, koji je složeniji, te pokazati da ga se nizom transformacija može svesti na izraz za kuglicu A koji je jednostavniji. Pritom se služimo ranije p v A) m v ya + p v B) m v yb) izvedenim transformacijskim izrazima. p v A) m v ya) + p v B) m v yb.4) v yb v 2 xb + v 2 yb v y + v2 x 4vx 2 + vy 2 + v2 x v y ) 2 + v2 x ) 2 ) [ 4v 2 x + v 2 y )]
20 v y + 2 v2 x + v4 x c 4 4 v2 x v2 y v y ) 2 v2 y v y v ya v 2 ya ) v 2 y ) ).8) Dakle, dokazali smo jednakost.7), a time i ispravnost izraza za relativističku količinu gibanja.3) uz relativistički faktor p u obliku.6)..3.2 Drugi Newtonov zakon u relativističkoj mehanici Nakon što smo utvrdili relativistički izraz za količinu gibanja, možemo se vratiti na pitanje o drugome Newtonovu zakonu. Nema više prepreke da bismo kao relativistički ispravan zakon prihvatili izvornu Newtonovu formulaciju d p F dt.9) U tom smo koraku prihvatili da sila F bude relativistička veličina. O njenim svojstvima transformacije iz jednog inercijalnog sustava u drugi bit će riječi kasnije. Da bismo analizirali odnos sile i promjene brzine, zgodno je zapisati gornju jednadžbu u obliku U starijim se udžbenicima navodio pojam relativističke mase kao mv) p m tako da se relativistička količina gibanja zapisivala u obliku p mv) v. U toj se formulaciji govorilo da je m masa mirovanja, te da porastom brzine tijela njegova masa mv) raste. Ovdje je prihvaćena formulacija koja prevladava u suvremenoj literaturi, a po njoj masa m ostaje relativistička invarijanta, tj. ne mijenja se s brzinom, odnosno ima istu vrijednost za dano tijelo ako ga se promatra iz bilo kojeg inercijalnog sustava. F d p dt d dt m v v2.20) Podrazumijeva se da tijelo promatramo u nekom referentnom sustavu, te da ono ima neku trenutnu brzinu v u tome sustavu, a na njega djeluje sila F koja mu nastoji promijeniti brzinu. Taj odnos možemo bolje analizirati ako vektore F i v rastavimo na komponente u danome sustavu Oxyz F x î + F y ĵ + F z ˆk d dt ) m v x î + v y ĵ + v z ˆk + vy 2 + vz 2.2) Vidimo da za komponentu sile duž osi x vrijedi F x d dt m v x + v 2 y + v 2 z.22) Zbog faktora p koji mora stajati u relativističkoj količini gibanja, dobili smo da je komponenta sile F x povezana ne samo s derivacijom od v x po vremenu, nego i s derivacijama od v y i v z po vremenu. Analogno vrijedi i za komponente F y i F z. Dakle, relativistička sila koja je na ovaj način uvedena, razlikuje se uvelike od sile u klasičnoj nerelativističkoj) fizici. Čak i u jednostavnijem slučaju u kojem sila djeluje u smjeru brzine tijela, npr. oboje duž osi x, odnosi medu veličinama nisu kao u klasičnoj mehanici. Možemo izračunati F x d dt dv x dt m v x + v2 x ) /2 dvx dt m m ) 3/2 a x.23)
21 Neka je sila F x konstantna u vremenu. Za akceleraciju dobivamo a x F x m ) 3/2.24) Samo u trenutku kada tijelo kreće iz mirovanja imamo akceleraciju a x F x /m. Kako s vremenom brzina raste, smanjuje se akceleracija sukladno formuli.24). Brzina i dalje raste, ali sve sporije, iako je sila konstantna. Kada v x c, imamo a x 0, pa nema daljnjeg porasta brzine. To je izuzetno važan relativistički rezultat koji kaže da niti jedno tijelo konačne mase ne može dosegnuti brzinu svjetlosti..3.3 Relativistička energija U klasičnoj smo mehanici uveli pojam rada kao djelovanja sile na nekom putu, te stvaranja veličine koju smo nazvali kinetičkom energijom tijela. Možemo sada ispitati što se dogada s tim veličinama i odnosima medu njima kada uvodimo relativističku mehaniku. Silu i put smo već definirali kao relativističke veličine, pa možemo zadržati pojam rada sile i nastaviti s računanjem. Uzmimo jednostavan slučaj u kojemu tijelo krene iz stanja mirovanja pod utjecajem sile F koja djeluje duž osi x, tako da na putu dx rad sile iznosi dw F x dx.25) Za silu F x možemo iskoristiti prethodno izvedeni izraz.23), te ujedno preračunati a x dx dv x dt v x dt v x dv x.26) Rezultat za infinitezimalni rad iznosi dw m v x dv x ) 3/2.27) Možemo pokazati da je dobiveni izraz jednak diferencijalu jedne nove veličine d m m c2 [ 2 v x dv x 2 ) 3/2 )] m v x dv x ) 3/2.28) Prema tome, infinitezimalni rad relativističke sile iznosi dw d m.29) Ukupan rad koji sila izvrši u pokretanju tijela iz stanja mirovanja v x 0), pa dok tijelo ne postigne neku brzinu v x 0, iznosi W vx 0 m c2 dw vx 0 d m m.30) Potrebno je razmotriti interpretaciju dobivenog rezultata. U klasičnoj mehanici smo naučili da rad sile dovodi do promjene kinetičke energije tijela. Pritom se podrazumijevalo da je tijelo slobodno, odnosno da se ne nalazi u nekom potencijalnom polju. Ako je tijelo u početku mirovalo, njegova je kinetička energija bila jednaka ništici, a na kraju djelovanja sile tijelo je imalo neku kinetičku energiju. Ovdje smo utvrdili da se rad relativističke sile svodi na razliku dvaju članova od kojih prvi ovisi o konačnoj brzini tijela v x, a drugi je konstanta neovisna o brzini tijela. Einstein je zaključio da i energija mora biti postavljena kao relativistička veličina, drugačija od klasične energije, te je načinio logičan izbor proglasivši prvi član u rezultatu.30) za ukupnu relativističku energiju E m c2.3) Iz tog izraza logično slijedi da drugi član u rezultatu.30) odgovara energiji mirovanja v x 0) E 0 m.32) Ovo predstavlja glasoviti Einsteinov rezultat. Samim time što neko tijelo ima masu, ono ima i odgovarajuću energiju. Ekvivalentnost mase i energije
22 potvrdena je kasnije u procesima nuklearne fisije i fuzije. Jednadžbu.30) možemo sada interpretirati tako da razliku članova gledamo kao porast energije tijela koji je nastao uslijed rada sile, te samo taj porast smatramo kinetičkom energijom E K E E 0 m.33) Za malene brzine tijela v x c), vrijedi aproksimacija + 2 Tad za kinetičku energiju dobivamo v 2 x.34) E K m + v 2 ) x 2 2 m v2 x.35) Dakle, relativistički izraz za kinetičku energiju postavljen u jednadžbi.33) ima ispravno ponašanje na niskim brzinama tijela, tj. svodi se na izraz za kinetičku energiju u nerelativističkoj klasičnoj) mehanici. Kad brzina tijela raste prema brzini svjetlosti v x c), relativistička energija E postaje beskonačno velika, a isto se zbiva i s kinetičkom energijom E K. Drugim riječima, trebalo bi uložiti beskonačnu količinu rada kako bi se tijelu dala brzina c. Ti su odnosi zgodno prikazani na slici.. Napomena: U gornjem smo razmatranju rabili oznaku v x za brzinu tijela kako bismo imali izravnu poveznicu s prethodnim izrazima za drugi Newtonov zakon. Razumije se, u svim tim izrazima možemo naprosto pisati oznaku v za brzinu jer se radi o gibanju po pravcu koji može imati bilo koji smjer, a u konačnici možemo os x postaviti upravo duž tog smjera..3.4 Transformacija sile Preostala nam je još relativistička sila kao dinamička veličina za koju je potrebno utvrditi jednadžbe transformacije iz jednog inercijalnog sustava u drugi. Razmotrimo najprije jednostavan Slika.: Ovisnost ukupne relativističke energije E i kinetičke energije E K o brzini v tijela čestice) izraženoj relativno prema brzini svjetlosti c. slučaj prikazan na slici.2a. Čestica tijelo) ima u sustavu S trenutnu brzinu v x i na nju djeluje sila F x tako da ima i trenutnu akceleraciju a x. Već smo ranije analizirali takav slučaj i dobili rezultat u jednadžbi.23) F x ) 3/2 m a x.36) Možemo promatrati istu česticu u sustavu S koji se giba brzinom V u odnosu na sustav S. Slika.2b prikazuje tu česticu u sustavu S, gdje ona ima brzinu v x. Ono isto djelovanje na česticu, koje se u sustavu S iskazivalo silom F x, sad se iskazuje postojanjem neke sile F x, koja čestici daje akceleraciju a x. Transformacije za brzinu i akceleraciju su nam poznate, te se pitamo kako glasi transformacija za silu, tj. ako poznamo silu F x, kako bismo izračunali silu F x. Drugi Newtonov zakon u relativističkoj formi vrijedi u svim inercijalnim sustavima, te možemo po analogiji s jednadžbom.36) pisati u sustavu S F x v 2 ) 3/2 m a x.37) x
23 Poslužimo se izrazom za transformaciju brzine.73) da bismo izračunali nazivnik: v 2 x V v x v x V V v x ) 2 v x V ) 2 V v x ) 2 2 V v x + V 2 c 4 v2 x v2 x + 2 v x V V 2 c 2 V ) 2 v x ) V 2 ) V v x Slika.2: a) U sustavu S čestica se giba duž osi x nekom trenutnom brzinom v x. Na česticu djeluje sila takoder duž osi x, tako da ona ima trenutnu akceleraciju a x. b) Za promatrača u sustavu S ista čestica ima trenutnu brzinu v x. Postojeće djelovanje na tu česticu očituje se kao sila F x, koja čestici daje akceleraciju a x. ) 2 2 V 2 ) ) V v x 2 V v x ) 2 ) 2.38) Ako uvrstimo ovaj rezultat u izraz za silu.37), te iskoristimo i izraz za transformaciju akceleracije.0), dobivamo ) 3 3 V F c x 2 v x ) 3/2 m 3 V ) 3 a x v x ) 3/2 m a x F x.39) Pomalo iznenadujuće, nakon tako složenog računa dobili smo rezultat kao i u nerelativističkoj Newtonovoj fizici. Promatrači u oba sustava opažaju istu po iznosu silu koja djeluje na česticu. Naglasimo još jednom da smo ovdje proveli dosljedno relativističko razmatranje. U sustavu S čestica ima trenutnu brzinu v x i sila F x joj daje trenutnu akceleraciju a x, dok u sustavu S ista čestica ima brzinu v x i sila F x joj daje trenutnu akceleraciju a x. U transformacijama smo pokazali da, iako čestica ima u dvama sustavima različite brzine v x v x ), te različite akceleracije a x a x ), ipak za sile vrijedi F x F x. Iako neočekivan, ovaj je rezultat ipak točan. Razmotrimo sada drugi jednostavan slučaj koji je prikazan na slici.3a. Čestica se u sustavu S giba samo duž osi y, tj. ima neku trenutnu brzinu v y. Ako na česticu djeluje sila F y, koja takoder ima smjer kao trenutna brzina, čestica će imati neku akceleraciju a y. Za gibanje duž pravca imamo drugi Newtonov zakon u relativističkoj formi F y v2 y ) 3/2 m a y.40) Razmotrimo sada istu česticu sa stajališta promatrača u sustavu S koji se giba brzinom V u
24 Količina gibanja čestice u sustavu S ima takoder dvije komponente p x p y m v x v 2 m v y v 2 m V V 2 + v 2 y m v y V 2 + v 2 y.44).45) Varijabla u ovim izrazima je v y. Naime, sila F y u sustavu S mijenja brzinu v y, a time se i u sustavu S mijenja brzina v y v y / prema jednadžbi transformacije.42). Stoga se u vremenu mijenja i komponenta količine gibanja p x, iako se odgovarajuća komponenta brzine ne mijenja v x V konst. Nadalje, prema drugome Newtonovu zakonu, ako postoji vremenska promjena p x, onda postoji i komponenta sile F x Slika.3: a) U sustavu S čestica se giba duž osi y nekom trenutnom brzinom v y. Na česticu djeluje sila takoder duž osi y, te joj daje trenutnu akceleraciju a y. b) Za promatrača u sustavu S čestica ima trenutnu brzinu s komponentama v x i v y, odnosno ukupnom brzinom v. Fizikalno djelovanje na česticu, koje se u sustavu S iskazuje silom F y, vidi se u sustavu S kao sila s dvjema komponentama F x i F y. odnosu na sustav S. Na slici.3b vidimo da ista čestica promatrana u sustavu S ima komponente brzine koje je lako izračunati v x v x V V V.4) v x v y v y V v x ) v y.42) Ovdje smo uzeli u obzir da je v x 0 u sustavu S. Za ukupnu brzinu čestice u sustavu S imamo v 2 v 2 x + v 2 y V 2 + v 2 y.43) F x dp x dt d dt m V m 2 ) 2 v y V v y V 2 + v 2 y m V V 2 + v 2 y dv y dt V 2 + v 2 y ) 3/2 ) 3/2 a y.46) U sustavu S postoji samo sila F y, te očekujemo da je njenom transformacijom u sustav S nastala komponenta F x. Da bismo došli do poveznice, izrazimo veličine na desnoj strani jednadžbe.46) pomoću veličina iz sustava S, tj. iskoristimo jednadžbu transformacije za v y iz.42) i ranije izvedenu jednadžbu transformacije za a y, koja se za ovaj slučaj v x 0 i a x 0) svodi na a y a y / 2. Tako dobivamo
25 F x m V v y V 2 + v 2 y 2 3/2 Izraz u nazivniku možemo preinačiti V 2 + v2 y 2 V 2 ) 2 v 2 y 2 2 a y.47) v2 y.48) Uvrstimo li ovaj izraz u jednadžbu.47), dobivamo F x m V v y 3 ) 3/2 a y.49) 3 v2 y Ovdje možemo prepoznati članove koji odgovaraju sili F y iz jednadžbe.40), tako da pišemo konačan rezultat ) F x V v y F y.50) Dobili smo jednadžbu transformacije putem koje možemo izračunati komponentu sile F x u sustavu S ukoliko nam je poznata sila F y u sustavu S. Korisno je analizirati rezultat koji smo upravo dobili. U posebnom slučaju kad se čestica u sustavu S upravo pokreće iz mirovanja, njena je trenutna brzina v y 0, pa nalazimo iz jednadžbe.50) da je F x 0, tj. u tome trenutku nema sile duž osi x u sustavu S. Medutim, nakon što sila F y u sustavu S pokrene česticu, tako da ona postigne neku trenutnu brzinu v y, nužno u sustavu S djeluje komponenta sile F x na istu česticu. Štoviše, kako raste brzina v y u sustavu S, povećava se i komponenta sile F x u sustavu S. Objašnjenje ove pojave moramo potražiti u prirodi relativističke količine gibanja koja raste s povećanjem brzine čestice. U ovome slučaju, komponenta brzine v x V je konstantna, ali raste komponenta v y, pa time i ukupna brzina v. No, kako raste ukupna količina gibanja čestice p, nužno raste i njena komponenta p x. U zaključku možemo reći da je komponenta sile F x potrebna da bi se uredno povećavala komponenta količine gibanja p x, iako je brzina čestice duž osi x pritom konstantna v x V. I ovdje smo suočeni s neobičnim posljedicama relativističke fizike. Preostalo nam je još izračunati komponentu sile F y u sustavu S. Prema drugome Newtonovu zakonu, imamo F y dp y dt d dt m v y V 2 + v 2 y Nakon pažljivog računanja dobivamo izraz.5) F y 2 V ) 2 + v 2 3/2 m a y.52) y Želimo sad komponentu sile F y iz sustava S povezati sa silom F y iz sustava S. U tu svrhu postupimo kao kod jednadžbe.46) i postavimo v y v y /, te v y v y / 2. Uočimo da u nazivniku jednadžbe.52) imamo isti izraz kao i u.46), tako da u daljnjem računanju možemo iskoristiti preinaku iz jednadžbe.48), te pisati F y 2 3 v2 y ) 3/2 m 2 a y.53) Nakon sredivanja, možemo prepoznati izraz za F y iz jednadžbe.40), tako da je konačan rezultat F y F y.54) Budući da je uvijek >, komponenta sile F y u sustavu S manja je od sile F y u sustavu S. Jednadžbe.50) i.54) predstavljaju transformaciju sile F y iz sustava S u silu s komponentama F x i F y u sustavu S. One vrijede za poseban slučaj kada se u sustavu S čestica giba duž osi y. Napomena: Sila koja djeluje na neku česticu dolazi uvijek od nekog drugog tijela. To djelovanje je fizikalna realnost. U opisanome primjeru, promatrač u sustavu S opaža da se djelovanje na promatranu čestici odvija u smjeru
26 osi y, tj. kao sila F y. Za promatrača u sustavu S, to isto djelovanje ima oblik sile s komponentama F x i F y. Mogli bismo razmatrati općenit slučaj u kojemu na česticu, koja se u sustavu S giba u proizvoljnom smjeru s trenutnim komponentama brzine v x i v y, djeluje sila u nekom drugom proizvoljnom smjeru tako da su njene komponente F x i F y. Problem je matematički složen i dugotrajan, te ga ne ćemo ovdje izvoditi. Bitne karakteristike relativističke sile već su iskazane u prethodnim primjerima. Završimo ovo izlaganje osvrtom na posebno jednostavan slučaj u kojemu se čestica u sustavu S upravo pokreće iz stanja mirovanja v x 0 i v y 0) pod utjecajem sile koja djeluje u proizvoljnom smjeru, tj. ima komponente F x i F y slika.4a). Dakle, ako su nam poznate komponente sile F x i F y u sustavu S, možemo izračunati komponente F x i F y u sustavu S pomoću jednadžbi transformacije F x F x.55) F y F y.56) Komponente sile u sustavu S prikazane su na slici.4b. U sustavu S u kojemu čestica ima trenutnu brzinu v x V, komponenta F y je manja od F y u sustavu u kojemu čestica trenutno miruje. Ove će nam jednadžbe transformacije biti od velike koristi u relativističkim izvodima u elektrodinamici. Slika.4: a) U sustavu S čestica se pokreće iz trenutnog stanja mirovanja djelovanjem neke sile F, koja općenito ima komponente F x i F y. b) U sustavu S, koji se giba brzinom V u odnosu na sustav S, čestica se giba trenutnom brzinom V. Isto fizikalno djelovanje se očituje u sustavu S kao sila F s komponentama F x F x i F y F y /. Sukladno prethodno obradenim primjerima, mogli bismo transformirati komponente F x i F y kao zasebne sile. Naime, zbog v y 0 možemo silu F x transformirati kao da se radi o gibanju duž osi x, pa je F x F x. S druge strane, zbog v x 0 možemo primijeniti pravila za gibanje duž osi y. No, kako je u tome trenutku v y 0, jednadžba.50) ukazuje da sila F y ne doprinosi komponenti F x. Ona doprinosi samo komponenti F y prema jednadžbi.54).
27
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
1.4 Tangenta i normala
 28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
28 1 DERIVACIJA 1.4 Tangenta i normala Ako funkcija f ima derivaciju u točki x 0, onda jednadžbe tangente i normale na graf funkcije f u točki (x 0 y 0 ) = (x 0 f(x 0 )) glase: t......... y y 0 = f (x
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
INTEGRALNI RAČUN. Teorije, metodike i povijest infinitezimalnih računa. Lucija Mijić 17. veljače 2011.
 INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
INTEGRALNI RAČUN Teorije, metodike i povijest infinitezimalnih računa Lucija Mijić lucija@ktf-split.hr 17. veljače 2011. Pogledajmo Predstavimo gornju sumu sa Dodamo još jedan Dobivamo pravokutnik sa Odnosno
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
1 Promjena baze vektora
 Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Linearna algebra 2 prvi kolokvij,
 Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
Linearna algebra 2 prvi kolokvij, 27.. 20.. Za koji cijeli broj t je funkcija f : R 4 R 4 R definirana s f(x, y) = x y (t + )x 2 y 2 + x y (t 2 + t)x 4 y 4, x = (x, x 2, x, x 4 ), y = (y, y 2, y, y 4 )
Neka je a 3 x 3 + a 2 x 2 + a 1 x + a 0 = 0 algebarska jednadžba trećeg stupnja. Rješavanje ove jednadžbe sastoji se od nekoliko koraka.
 Neka je a 3 x 3 + a x + a 1 x + a 0 = 0 algebarska jednadžba trećeg stupnja. Rješavanje ove jednadžbe sastoji se od nekoliko koraka. 1 Normiranje jednadžbe. Jednadžbu podijelimo s a 3 i dobivamo x 3 +
Neka je a 3 x 3 + a x + a 1 x + a 0 = 0 algebarska jednadžba trećeg stupnja. Rješavanje ove jednadžbe sastoji se od nekoliko koraka. 1 Normiranje jednadžbe. Jednadžbu podijelimo s a 3 i dobivamo x 3 +
- pravac n je zadan s točkom T(2,0) i koeficijentom smjera k=2. (30 bodova)
 i koeficijentom smjera k=2. (30 bodova)") MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
IZVODI ZADACI (I deo)
") IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika
 1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
TRIGONOMETRIJSKE FUNKCIJE I I.1.
 TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
TRIGONOMETRIJSKE FUNKCIJE I I Odredi na brojevnoj trigonometrijskoj kružnici točku Et, za koju je sin t =,cost < 0 Za koje realne brojeve a postoji realan broj takav da je sin = a? Izračunaj: sin π tg
Funkcije dviju varjabli (zadaci za vježbu)
") Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
Funkcije dviju varjabli (zadaci za vježbu) Vidosava Šimić 22. prosinca 2009. Domena funkcije dvije varijable Ako je zadano pridruživanje (x, y) z = f(x, y), onda se skup D = {(x, y) ; f(x, y) R} R 2 naziva
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
šupanijsko natjecanje iz zike 2017/2018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova)
") šupanijsko natjecanje iz zike 017/018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova) U prvom vremenskom intervalu t 1 = 7 s automobil se giba jednoliko ubrzano ubrzanjem
šupanijsko natjecanje iz zike 017/018 Srednje ²kole 1. grupa Rje²enja i smjernice za bodovanje 1. zadatak (11 bodova) U prvom vremenskom intervalu t 1 = 7 s automobil se giba jednoliko ubrzano ubrzanjem
(P.I.) PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.
 PRETPOSTAVKA INDUKCIJE - pretpostavimo da tvrdnja vrijedi za n = k.") 1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
1 3 Skupovi brojeva 3.1 Skup prirodnih brojeva - N N = {1, 2, 3,...} Aksiom matematičke indukcije Neka je N skup prirodnih brojeva i M podskup od N. Ako za M vrijede svojstva: 1) 1 M 2) n M (n + 1) M,
Matematička analiza 1 dodatni zadaci
 Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
Matematička analiza 1 dodatni zadaci 1. Ispitajte je li funkcija f() := 4 4 5 injekcija na intervalu I, te ako jest odredite joj sliku i inverz, ako je (a) I = [, 3), (b) I = [1, ], (c) I = ( 1, 0].. Neka
POVRŠINA TANGENCIJALNO-TETIVNOG ČETVEROKUTA
 POVRŠIN TNGENIJLNO-TETIVNOG ČETVEROKUT MLEN HLP, JELOVR U mnoštvu mnogokuta zanimljiva je formula za površinu četverokuta kojemu se istoobno može upisati i opisati kružnica: gje su a, b, c, uljine stranica
POVRŠIN TNGENIJLNO-TETIVNOG ČETVEROKUT MLEN HLP, JELOVR U mnoštvu mnogokuta zanimljiva je formula za površinu četverokuta kojemu se istoobno može upisati i opisati kružnica: gje su a, b, c, uljine stranica
Linearna algebra 2 prvi kolokvij,
 1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
1 2 3 4 5 Σ jmbag smjer studija Linearna algebra 2 prvi kolokvij, 7. 11. 2012. 1. (10 bodova) Neka je dano preslikavanje s : R 2 R 2 R, s (x, y) = (Ax y), pri čemu je A: R 2 R 2 linearan operator oblika
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
Dinamika tijela. a g A mg 1 3cos L 1 3cos 1
 Zadatak, Štap B duljine i mase m pridržan užetom u točki B, miruje u vertikalnoj ravnini kako je prikazano na skii. reba odrediti reakiju u ležaju u trenutku kad se presječe uže u točki B. B Rješenje:
Zadatak, Štap B duljine i mase m pridržan užetom u točki B, miruje u vertikalnoj ravnini kako je prikazano na skii. reba odrediti reakiju u ležaju u trenutku kad se presječe uže u točki B. B Rješenje:
Riješeni zadaci: Limes funkcije. Neprekidnost
 Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
Riješeni zadaci: Limes funkcije. Neprekidnost Limes funkcije Neka je 0 [a, b] i f : D R, gdje je D = [a, b] ili D = [a, b] \ { 0 }. Kažemo da je es funkcije f u točki 0 jednak L i pišemo f ) = L, ako za
18. listopada listopada / 13
 18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
18. listopada 2016. 18. listopada 2016. 1 / 13 Neprekidne funkcije Važnu klasu funkcija tvore neprekidne funkcije. To su funkcije f kod kojih mala promjena u nezavisnoj varijabli x uzrokuje malu promjenu
Osnovne teoreme diferencijalnog računa
 Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Riješeni zadaci: Nizovi realnih brojeva
 Riješei zadaci: Nizovi realih brojeva Nizovi, aritmetički iz, geometrijski iz Fukciju a : N R azivamo beskoači) iz realih brojeva i ozačavamo s a 1, a,..., a,... ili a ), pri čemu je a = a). Aritmetički
Riješei zadaci: Nizovi realih brojeva Nizovi, aritmetički iz, geometrijski iz Fukciju a : N R azivamo beskoači) iz realih brojeva i ozačavamo s a 1, a,..., a,... ili a ), pri čemu je a = a). Aritmetički
a M a A. Može se pokazati da je supremum (ako postoji) jedinstven pa uvodimo oznaku sup A.
 jedinstven pa uvodimo oznaku sup A.") 3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
3 Infimum i supremum Definicija. Neka je A R. Kažemo da je M R supremum skupa A ako je (i) M gornja meda skupa A, tj. a M a A. (ii) M najmanja gornja meda skupa A, tj. ( ε > 0)( a A) takav da je a > M
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika. Monotonost i ekstremi. Katica Jurasić. Rijeka, 2011.
 Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Veleučilište u Rijeci Stručni studij sigurnosti na radu Akad. god. 2011/2012. Matematika Monotonost i ekstremi Katica Jurasić Rijeka, 2011. Ishodi učenja - predavanja Na kraju ovog predavanja moći ćete:,
Eliminacijski zadatak iz Matematike 1 za kemičare
 Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
Za mnoge reakcije vrijedi Arrheniusova jednadžba, koja opisuje vezu koeficijenta brzine reakcije i temperature: K = Ae Ea/(RT ). - T termodinamička temperatura (u K), - R = 8, 3145 J K 1 mol 1 opća plinska
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
radni nerecenzirani materijal za predavanja R(f) = {f(x) x D}
 = {f(x) x D}") Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Matematika 1 Funkcije radni nerecenzirani materijal za predavanja Definicija 1. Neka su D i K bilo koja dva neprazna skupa. Postupak f koji svakom elementu x D pridružuje točno jedan element y K zovemo funkcija
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Sume kvadrata. mn = (ax + by) 2 + (ay bx) 2.
 2 + (ay bx) 2.") Sume kvadrata Koji se prirodni brojevi mogu prikazati kao zbroj kvadrata dva cijela broja? Propozicija 1. Ako su brojevi m i n sume dva kvadrata, onda je i njihov produkt m n takoder suma dva kvadrata.
Sume kvadrata Koji se prirodni brojevi mogu prikazati kao zbroj kvadrata dva cijela broja? Propozicija 1. Ako su brojevi m i n sume dva kvadrata, onda je i njihov produkt m n takoder suma dva kvadrata.
7 Algebarske jednadžbe
 7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
7 Algebarske jednadžbe 7.1 Nultočke polinoma Skup svih polinoma nad skupom kompleksnih brojeva označavamo sa C[x]. Definicija. Nultočka polinoma f C[x] je svaki kompleksni broj α takav da je f(α) = 0.
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
π π ELEKTROTEHNIČKI ODJEL i) f (x) = x 3 x 2 x + 1, a = 1, b = 1;
 f (x) = x 3 x 2 x + 1, a = 1, b = 1;") 1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
1. Provjerite da funkcija f definirana na segmentu [a, b] zadovoljava uvjete Rolleova poučka, pa odredite barem jedan c a, b takav da je f '(c) = 0 ako je: a) f () = 1, a = 1, b = 1; b) f () = 4, a =,
RIJEŠENI ZADACI I TEORIJA IZ
 RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
RIJEŠENI ZADACI I TEORIJA IZ LOGARITAMSKA FUNKCIJA SVOJSTVA LOGARITAMSKE FUNKCIJE OSNOVE TRIGONOMETRIJE PRAVOKUTNOG TROKUTA - DEFINICIJA TRIGONOMETRIJSKIH FUNKCIJA - VRIJEDNOSTI TRIGONOMETRIJSKIH FUNKCIJA
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
VJEŽBE 3 BIPOLARNI TRANZISTORI. Slika 1. Postoje npn i pnp bipolarni tranziostori i njihovi simboli su dati na slici 2 i to npn lijevo i pnp desno.
 JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
JŽ 3 POLAN TANZSTO ipolarni tranzistor se sastoji od dva pn spoja kod kojih je jedna oblast zajednička za oba i naziva se baza, slika 1 Slika 1 ipolarni tranzistor ima 3 izvoda: emitor (), kolektor (K)
PRIMJER 3. MATLAB filtdemo
 PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
PRIMJER 3. MATLAB filtdemo Prijenosna funkcija (IIR) Hz () =, 6 +, 3 z +, 78 z +, 3 z +, 53 z +, 3 z +, 78 z +, 3 z +, 6 z, 95 z +, 74 z +, z +, 9 z +, 4 z +, 5 z +, 3 z +, 4 z 3 4 5 6 7 8 3 4 5 6 7 8
Determinante. a11 a. a 21 a 22. Definicija 1. (Determinanta prvog reda) Determinanta matrice A = [a] je broj a.
![Determinante. a11 a. a 21 a 22. Definicija 1. (Determinanta prvog reda) Determinanta matrice A = [a] je broj a.](/thumbs/72/66829778.jpg "Determinante. a11 a. a 21 a 22. Definicija 1. (Determinanta prvog reda) Determinanta matrice A = [a] je broj a.") Determinante Determinanta A deta je funkcija definirana na skupu svih kvadratnih matrica, a poprima vrijednosti iz skupa skalara Osim oznake deta za determinantu kvadratne matrice a 11 a 12 a 1n a 21 a
Determinante Determinanta A deta je funkcija definirana na skupu svih kvadratnih matrica, a poprima vrijednosti iz skupa skalara Osim oznake deta za determinantu kvadratne matrice a 11 a 12 a 1n a 21 a
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
Strukture podataka i algoritmi 1. kolokvij 16. studenog Zadatak 1
 Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Strukture podataka i algoritmi 1. kolokvij Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati i uvid u kolokvije: ponedjeljak,
Numerička matematika 2. kolokvij (1. srpnja 2009.)
") Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
Numerička matematika 2. kolokvij (1. srpnja 29.) Zadatak 1 (1 bodova.) Teorijsko pitanje. (A) Neka je G R m n, uz m n, pravokutna matrica koja ima puni rang po stupcima, tj. rang(g) = n. (a) Napišite puni
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
Više dokaza jedne poznate trigonometrijske nejednakosti u trokutu
 Osječki matematički list 000), 5 9 5 Više dokaza jedne poznate trigonometrijske nejednakosti u trokutu Šefket Arslanagić Alija Muminagić Sažetak. U radu se navodi nekoliko različitih dokaza jedne poznate
Osječki matematički list 000), 5 9 5 Više dokaza jedne poznate trigonometrijske nejednakosti u trokutu Šefket Arslanagić Alija Muminagić Sažetak. U radu se navodi nekoliko različitih dokaza jedne poznate
ISPITNI ZADACI FORMULE. A, B i C koeficijenti (barem jedan A ili B različiti od nule)
") FORMULE Implicitni oblik jednadžbe pravca A, B i C koeficijenti (barem jedan A ili B različiti od nule) Eksplicitni oblik jednadžbe pravca ili Pravci paralelni s koordinatnim osima - Kada je u općoj jednadžbi
FORMULE Implicitni oblik jednadžbe pravca A, B i C koeficijenti (barem jedan A ili B različiti od nule) Eksplicitni oblik jednadžbe pravca ili Pravci paralelni s koordinatnim osima - Kada je u općoj jednadžbi
Masa, Centar mase & Moment tromosti
 FAKULTET ELEKTRTEHNIKE, STRARSTVA I BRDGRADNE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba Masa, Centar mase & Moment tromosti Ime i rezime rosinac 008. Zadatak:
FAKULTET ELEKTRTEHNIKE, STRARSTVA I BRDGRADNE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba Masa, Centar mase & Moment tromosti Ime i rezime rosinac 008. Zadatak:
SEMINAR IZ KOLEGIJA ANALITIČKA KEMIJA I. Studij Primijenjena kemija
 SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
SEMINAR IZ OLEGIJA ANALITIČA EMIJA I Studij Primijenjena kemija 1. 0,1 mola NaOH je dodano 1 litri čiste vode. Izračunajte ph tako nastale otopine. NaOH 0,1 M NaOH Na OH Jak elektrolit!!! Disoira potpuno!!!
Impuls i količina gibanja
 FAKULTET ELEKTROTEHNIKE, STROJARSTVA I BRODOGRADNJE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba 4 Impuls i količina gibanja Ime i prezime prosinac 2008. MEHANIKA
FAKULTET ELEKTROTEHNIKE, STROJARSTVA I BRODOGRADNJE - SPLIT Katedra za dinamiku i vibracije Mehanika 3 (Dinamika) Laboratorijska vježba 4 Impuls i količina gibanja Ime i prezime prosinac 2008. MEHANIKA
REFERENTNI SUSTAVI. Poglavlje Relativnost gibanja Pojam referentnog sustava
 Poglavlje 4 REFERENTNI SUSTAVI Za opisivanje raznih gibanja koja smo razmatrali u prethodnim poglavljima, bilo je potrebno najprije odrediti neku točku kao ishodište O koordinatnog sustava u odnosu prema
Poglavlje 4 REFERENTNI SUSTAVI Za opisivanje raznih gibanja koja smo razmatrali u prethodnim poglavljima, bilo je potrebno najprije odrediti neku točku kao ishodište O koordinatnog sustava u odnosu prema
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Algebra Vektora. pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske
 Algebra Vektora 1 Algebra vektora 1.1 Definicija vektora pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske veličine za opis skalarne veličine trebamo zadati samo njezin iznos (npr.
Algebra Vektora 1 Algebra vektora 1.1 Definicija vektora pri rješavanju fizikalnih problema najčešće susrećemo skalarne i vektorske veličine za opis skalarne veličine trebamo zadati samo njezin iznos (npr.
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
( ) ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4
 ( ) 2 UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET. Zadaci za pripremu polaganja kvalifikacionog ispita iz Matematike. 1. Riješiti jednačine: 4") UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
UNIVERZITET U ZENICI POLITEHNIČKI FAKULTET Riješiti jednačine: a) 5 = b) ( ) 3 = c) + 3+ = 7 log3 č) = 8 + 5 ć) sin cos = d) 5cos 6cos + 3 = dž) = đ) + = 3 e) 6 log + log + log = 7 f) ( ) ( ) g) ( ) log
2log. se zove numerus (logaritmand), je osnova (baza) log. log. log =
, je osnova (baza) log. log. log =") ( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
( > 0, 0)!" # > 0 je najčešći uslov koji postavljamo a još je,, > 0 se zove numerus (aritmand), je osnova (baza). 0.. ( ) +... 7.. 8. Za prelazak na neku novu bazu c: 9. Ako je baza (osnova) 0 takvi se
Ĉetverokut - DOMAĆA ZADAĆA. Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke.
 Ĉetverokut - DOMAĆA ZADAĆA Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke. 1. Duljine dijagonala paralelograma jednake su 6,4 cm i 11 cm, a duljina jedne njegove
Ĉetverokut - DOMAĆA ZADAĆA Nakon odgledanih videa trebali biste biti u stanju samostalno riješiti sljedeće zadatke. 1. Duljine dijagonala paralelograma jednake su 6,4 cm i 11 cm, a duljina jedne njegove
TRIGONOMETRIJA TROKUTA
 TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
TRIGONOMETRIJA TROKUTA Standardne oznake u trokutuu ABC: a, b, c stranice trokuta α, β, γ kutovi trokuta t,t,t v,v,v s α,s β,s γ R r s težišnice trokuta visine trokuta simetrale kutova polumjer opisane
( ) ( ) Zadatak 001 (Ines, hotelijerska škola) Ako je tg x = 4, izračunaj
 ( ) Zadatak 001 (Ines, hotelijerska škola) Ako je tg x = 4, izračunaj") Zadaak (Ines, hoelijerska škola) Ako je g, izračunaj + 5 + Rješenje Korisimo osnovnu rigonomerijsku relaciju: + Znači svaki broj n možemo zapisai n n n ( + ) + + + + 5 + 5 5 + + + + + 7 + Zadano je g Tangens
Zadaak (Ines, hoelijerska škola) Ako je g, izračunaj + 5 + Rješenje Korisimo osnovnu rigonomerijsku relaciju: + Znači svaki broj n možemo zapisai n n n ( + ) + + + + 5 + 5 5 + + + + + 7 + Zadano je g Tangens
2.7 Primjene odredenih integrala
 . INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
. INTEGRAL 77.7 Primjene odredenih integrala.7.1 Računanje površina Pořsina lika omedenog pravcima x = a i x = b te krivuljama y = f(x) i y = g(x) je b P = f(x) g(x) dx. a Zadatak.61 Odredite površinu
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE GODINE 8. RAZRED TOČNI ODGOVORI
 21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE 2014. GODINE 8. RAZRED TOČNI ODGOVORI Bodovanje za sve zadatke: - boduju se samo točni odgovori - dodatne upute navedene su za pojedine skupine zadataka
21. ŠKOLSKO/OPĆINSKO/GRADSKO NATJECANJE IZ GEOGRAFIJE 2014. GODINE 8. RAZRED TOČNI ODGOVORI Bodovanje za sve zadatke: - boduju se samo točni odgovori - dodatne upute navedene su za pojedine skupine zadataka
Prostorni spojeni sistemi
 Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Prostorni spojeni sistemi K. F. (poopćeni) pomaci i stupnjevi slobode tijela u prostoru: 1. pomak po pravcu (translacija): dva kuta kojima je odreden orijentirani pravac (os) i orijentirana duljina pomaka
Gravitacija. Gravitacija. Newtonov zakon gravitacije. Odredivanje gravitacijske konstante. Keplerovi zakoni. Gravitacijsko polje. Troma i teška masa
 Claudius Ptolemeus (100-170) - geocentrični sustav Nikola Kopernik (1473-1543) - heliocentrični sustav Tycho Brahe (1546-1601) precizno bilježio putanje nebeskih tijela 1600. Johannes Kepler (1571-1630)
Claudius Ptolemeus (100-170) - geocentrični sustav Nikola Kopernik (1473-1543) - heliocentrični sustav Tycho Brahe (1546-1601) precizno bilježio putanje nebeskih tijela 1600. Johannes Kepler (1571-1630)
Repetitorij-Dinamika. F i Zakon očuvanja impulsa (ZOI): i p i = j p j. Zakon očuvanja energije (ZOE):
: i p i = j p j. Zakon očuvanja energije (ZOE):") Repetitorij-Dinamika Dinamika materijalne točke Sila: F p = m a = lim t 0 t = d p dt m a = i F i Zakon očuvanja impulsa (ZOI): i p i = j p j i p ix = j p jx te i p iy = j p jy u 2D sustavu Zakon očuvanja
Repetitorij-Dinamika Dinamika materijalne točke Sila: F p = m a = lim t 0 t = d p dt m a = i F i Zakon očuvanja impulsa (ZOI): i p i = j p j i p ix = j p jx te i p iy = j p jy u 2D sustavu Zakon očuvanja
Matematičke metode u marketingumultidimenzionalno skaliranje. Lavoslav ČaklovićPMF-MO
 Matematičke metode u marketingu Multidimenzionalno skaliranje Lavoslav Čaklović PMF-MO 2016 MDS Čemu služi: za redukciju dimenzije Bazirano na: udaljenosti (sličnosti) među objektima Problem: Traži se
Matematičke metode u marketingu Multidimenzionalno skaliranje Lavoslav Čaklović PMF-MO 2016 MDS Čemu služi: za redukciju dimenzije Bazirano na: udaljenosti (sličnosti) među objektima Problem: Traži se
9. GRANIČNA VRIJEDNOST I NEPREKIDNOST FUNKCIJE GRANIČNA VRIJEDNOST ILI LIMES FUNKCIJE
 Geodetski akultet, dr sc J Beban-Brkić Predavanja iz Matematike 9 GRANIČNA VRIJEDNOST I NEPREKIDNOST FUNKCIJE GRANIČNA VRIJEDNOST ILI LIMES FUNKCIJE Granična vrijednost unkcije kad + = = Primjer:, D( )
Geodetski akultet, dr sc J Beban-Brkić Predavanja iz Matematike 9 GRANIČNA VRIJEDNOST I NEPREKIDNOST FUNKCIJE GRANIČNA VRIJEDNOST ILI LIMES FUNKCIJE Granična vrijednost unkcije kad + = = Primjer:, D( )
( , treći kolokvij) 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)
 3. Na dite lokalne ekstreme funkcije z = x 4 + y 4 2x 2 + 2y 2 3. (20 bodova)") A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
A MATEMATIKA (.6.., treći kolokvij. Zadana je funkcija z = e + + sin(. Izračunajte a z (,, b z (,, c z.. Za funkciju z = 3 + na dite a diferencijal dz, b dz u točki T(, za priraste d =. i d =.. c Za koliko
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Operacije s matricama
 Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
4. poglavlje (korigirano) LIMESI FUNKCIJA
 LIMESI FUNKCIJA") . Limesi funkcija (sa svim korekcijama) 69. poglavlje (korigirano) LIMESI FUNKCIJA U ovom poglavlju: Neodređeni oblik Neodređeni oblik Neodređeni oblik Kose asimptote Neka je a konačan realan broj ili
. Limesi funkcija (sa svim korekcijama) 69. poglavlje (korigirano) LIMESI FUNKCIJA U ovom poglavlju: Neodređeni oblik Neodređeni oblik Neodređeni oblik Kose asimptote Neka je a konačan realan broj ili
BIPOLARNI TRANZISTOR Auditorne vježbe
 BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
BPOLARN TRANZSTOR Auditorne vježbe Struje normalno polariziranog bipolarnog pnp tranzistora: p n p p - p n B0 struja emitera + n B + - + - U B B U B struja kolektora p + B0 struja baze B n + R - B0 gdje
IZVODI ZADACI (I deo)
") IZVODI ZADACI (I deo Najpre da se podsetimo tablice i osnovnih pravila:. C0.. (. ( n n n-. (a a lna 6. (e e 7. (log a 8. (ln ln a (>0 9. ( 0 0. (>0 (ovde je >0 i a >0. (cos. (cos - π. (tg kπ cos. (ctg
IZVODI ZADACI (I deo Najpre da se podsetimo tablice i osnovnih pravila:. C0.. (. ( n n n-. (a a lna 6. (e e 7. (log a 8. (ln ln a (>0 9. ( 0 0. (>0 (ovde je >0 i a >0. (cos. (cos - π. (tg kπ cos. (ctg
5. PARCIJALNE DERIVACIJE
 5. PARCIJALNE DERIVACIJE 5.1. Izračunajte parcijalne derivacije sljedećih funkcija: (a) f (x y) = x 2 + y (b) f (x y) = xy + xy 2 (c) f (x y) = x 2 y + y 3 x x + y 2 (d) f (x y) = x cos x cos y (e) f (x
5. PARCIJALNE DERIVACIJE 5.1. Izračunajte parcijalne derivacije sljedećih funkcija: (a) f (x y) = x 2 + y (b) f (x y) = xy + xy 2 (c) f (x y) = x 2 y + y 3 x x + y 2 (d) f (x y) = x cos x cos y (e) f (x
Otpornost R u kolu naizmjenične struje
 Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
Otpornost R u kolu naizmjenične struje Pretpostavimo da je otpornik R priključen na prostoperiodični napon: Po Omovom zakonu pad napona na otporniku je: ( ) = ( ω ) u t sin m t R ( ) = ( ) u t R i t Struja
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
konst. Električni otpor
 Sveučilište J. J. Strossmayera u sijeku Elektrotehnički fakultet sijek Stručni studij Električni otpor hmov zakon Pri protjecanju struje kroz vodič pojavljuje se otpor. Georg Simon hm je ustanovio ovisnost
Sveučilište J. J. Strossmayera u sijeku Elektrotehnički fakultet sijek Stručni studij Električni otpor hmov zakon Pri protjecanju struje kroz vodič pojavljuje se otpor. Georg Simon hm je ustanovio ovisnost
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
SISTEMI DIFERENCIJALNIH JEDNAČINA - ZADACI NORMALNI OBLIK
 SISTEMI DIFERENCIJALNIH JEDNAČINA - ZADACI NORMALNI OBLIK. Rši sism jdnačina: d 7 d d d Ršnj: Ša j idja kod ovih zadaaka? Jdnu od jdnačina difrniramo, o js nađmo izvod l jdnačin i u zamnimo drugu jdnačinu.
SISTEMI DIFERENCIJALNIH JEDNAČINA - ZADACI NORMALNI OBLIK. Rši sism jdnačina: d 7 d d d Ršnj: Ša j idja kod ovih zadaaka? Jdnu od jdnačina difrniramo, o js nađmo izvod l jdnačin i u zamnimo drugu jdnačinu.
M086 LA 1 M106 GRP Tema: Uvod. Operacije s vektorima.
 M086 LA 1 M106 GRP Tema:.. 5. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 2 M086 LA 1, M106 GRP.. 2/17 P 1 www.fizika.unios.hr/grpua/
M086 LA 1 M106 GRP Tema:.. 5. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 2 M086 LA 1, M106 GRP.. 2/17 P 1 www.fizika.unios.hr/grpua/
Dijagonalizacija operatora
 Dijagonalizacija operatora Problem: Može li se odrediti baza u kojoj zadani operator ima dijagonalnu matricu? Ova problem je povezan sa sljedećim pojmovima: 1 Karakteristični polinom operatora f 2 Vlastite
Dijagonalizacija operatora Problem: Može li se odrediti baza u kojoj zadani operator ima dijagonalnu matricu? Ova problem je povezan sa sljedećim pojmovima: 1 Karakteristični polinom operatora f 2 Vlastite
POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE
 **** MLADEN SRAGA **** 011. UNIVERZALNA ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE SKUP REALNIH BROJEVA α Autor: MLADEN SRAGA Grafički urednik: BESPLATNA - WEB-VARIJANTA Tisak: M.I.M.-SRAGA
**** MLADEN SRAGA **** 011. UNIVERZALNA ZBIRKA POTPUNO RIJEŠENIH ZADATAKA PRIRUČNIK ZA SAMOSTALNO UČENJE SKUP REALNIH BROJEVA α Autor: MLADEN SRAGA Grafički urednik: BESPLATNA - WEB-VARIJANTA Tisak: M.I.M.-SRAGA
MATEMATIKA 1 8. domaća zadaća: RADIJVEKTORI. ALGEBARSKE OPERACIJE S RADIJVEKTORIMA. LINEARNA (NE)ZAVISNOST SKUPA RADIJVEKTORA.
ZAVISNOST SKUPA RADIJVEKTORA.") Napomena: U svim zadatcima O označava ishodište pravokutnoga koordinatnoga sustava u ravnini/prostoru (tj. točke (0,0) ili (0, 0, 0), ovisno o zadatku), označava skalarni umnožak, a vektorski umnožak.
Napomena: U svim zadatcima O označava ishodište pravokutnoga koordinatnoga sustava u ravnini/prostoru (tj. točke (0,0) ili (0, 0, 0), ovisno o zadatku), označava skalarni umnožak, a vektorski umnožak.
4.7. Zadaci Formalizam diferenciranja (teorija na stranama ) 343. Znajući izvod funkcije x arctg x, odrediti izvod funkcije x arcctg x.
 343. Znajući izvod funkcije x arctg x, odrediti izvod funkcije x arcctg x.") 4.7. ZADACI 87 4.7. Zadaci 4.7.. Formalizam diferenciranja teorija na stranama 4-46) 340. Znajući izvod funkcije arcsin, odrediti izvod funkcije arccos. Rešenje. Polazeći od jednakosti arcsin + arccos
4.7. ZADACI 87 4.7. Zadaci 4.7.. Formalizam diferenciranja teorija na stranama 4-46) 340. Znajući izvod funkcije arcsin, odrediti izvod funkcije arccos. Rešenje. Polazeći od jednakosti arcsin + arccos
Pošto pretvaramo iz veće u manju mjernu jedinicu broj 2.5 množimo s 1000,
 PRERAČUNAVANJE MJERNIH JEDINICA PRIMJERI, OSNOVNE PRETVORBE, POTENCIJE I ZNANSTVENI ZAPIS, PREFIKSKI, ZADACI S RJEŠENJIMA Primjeri: 1. 2.5 m = mm Pretvaramo iz veće u manju mjernu jedinicu. 1 m ima dm,
PRERAČUNAVANJE MJERNIH JEDINICA PRIMJERI, OSNOVNE PRETVORBE, POTENCIJE I ZNANSTVENI ZAPIS, PREFIKSKI, ZADACI S RJEŠENJIMA Primjeri: 1. 2.5 m = mm Pretvaramo iz veće u manju mjernu jedinicu. 1 m ima dm,
Rijeseni neki zadaci iz poglavlja 4.5
 Rijeseni neki zdci iz poglvlj 4.5 Prije rijesvnj zdtk prisjetimo se itnih stvri koje ce ns prtiti tijekom njihovog promtrnj. Definicij: (Trigonometrij prvokutnog trokut) ktet nsuprot kut ϕ sin ϕ hipotenuz
Rijeseni neki zdci iz poglvlj 4.5 Prije rijesvnj zdtk prisjetimo se itnih stvri koje ce ns prtiti tijekom njihovog promtrnj. Definicij: (Trigonometrij prvokutnog trokut) ktet nsuprot kut ϕ sin ϕ hipotenuz
( x) ( ) ( ) ( x) ( ) ( x) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
 ( ) ( ) ( x) ( ) ( x) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )") Zadatak 08 (Vedrana, maturantica) Je li unkcija () = cos (sin ) sin (cos ) parna ili neparna? Rješenje 08 Funkciju = () deiniranu u simetričnom području a a nazivamo: parnom, ako je ( ) = () neparnom,
Zadatak 08 (Vedrana, maturantica) Je li unkcija () = cos (sin ) sin (cos ) parna ili neparna? Rješenje 08 Funkciju = () deiniranu u simetričnom području a a nazivamo: parnom, ako je ( ) = () neparnom,
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
2. Ako je funkcija f(x) parna onda se Fourierov red funkcije f(x) reducira na Fourierov kosinusni red. f(x) cos
 parna onda se Fourierov red funkcije f(x) reducira na Fourierov kosinusni red. f(x) cos") . KOLOKVIJ PRIMIJENJENA MATEMATIKA FOURIEROVE TRANSFORMACIJE 1. Za periodičnu funkciju f(x) s periodom p=l Fourierov red je gdje su a,a n, b n Fourierovi koeficijenti od f(x) gdje su a =, a n =, b n =..
. KOLOKVIJ PRIMIJENJENA MATEMATIKA FOURIEROVE TRANSFORMACIJE 1. Za periodičnu funkciju f(x) s periodom p=l Fourierov red je gdje su a,a n, b n Fourierovi koeficijenti od f(x) gdje su a =, a n =, b n =..
MATEMATIKA 2. Grupa 1 Rexea zadataka. Prvi pismeni kolokvijum, Dragan ori
 MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =
MATEMATIKA 2 Prvi pismeni kolokvijum, 14.4.2016 Grupa 1 Rexea zadataka Dragan ori Zadaci i rexea 1. unkcija f : R 2 R definisana je sa xy 2 f(x, y) = x2 + y sin 3 2 x 2, (x, y) (0, 0) + y2 0, (x, y) =