Mehanika. kinematika. * Obaveštenje : računske vežbe odložene
|
|
|
- Ήρα Αλιβιζάτος
- 8 χρόνια πριν
- Προβολές:
Transcript
1 Mehanika kinematika * Obaveštenje : računske vežbe odložene 7., 8. i 9. Octobar 2015
2 Osnovni zadatak fizike (ϕνσιξ - priroda) je izučavanje osnovnih svojstava prirode, a jedno od tih svojstava je materijalnost. Materija se definiše kao supstancija od koje su sačinjeni fizički objekti. Materijom se smatra sve ono što se čulima može osetiti i poseduje fizičke osobine. Materija se može definisati kao istovremena manifestacija mase i energije u vremenu i prostoru. Materija uvek postoji u prostoru i nalazi se u procesu neprekidnog kretanja i promena. Jedan od najstarijih zakona fizike, formulisan u staroj Grčkoj: Zakon održanja materije koji glasi: Materija se ne može unuštiti, niti iz ničega stvoriti, ona može samo da se menja i da prelazi iz jednog oblika u drugi. Kako je materija neraskidivo vezana sa kretanjem to će naš prvi zadatak biti da se pozabavimo ovom pojavom.
3 Kretanje Gde god da pogledamo oko nas, možemo da uočimo tela u "u stanju kretanja. Čak i kada smo u stanju mirovanja, naše srce kuca i na taj način tera krv da struji kroz krvne sudove. Proučavanje i razumevanje kretanja je interesantno, često iz potpuno praktičnih razloga. Možemo da se zapitamo gde će teniska loptica pasti ako se udari pod odredjenim uglom u odnosu na horizontalu i nekom početnom brzinom. Osim praktičnih, postoje i drugi razlozi zbog kojih se, pre nego što se krene u druge oblasti fizike, mora posvetiti odredjena pažnja upravo kretanju tela. Određeni pojmovi, koji se uvode kada se proučava kretanje, npr. ubrzanje, su osnova za kasnije uvodjenje drugih veličina, recimo sile.
4 Mehaničko kretanje je promena uzajamnog položaja tela ili njihovih delova tokom vremena. Kretanje se može podeliti na: niže oblike kretanja- mehanička kretanja i kretanja u fizičkim poljima, koja spadaju u više oblike nižeg kretanja - Mehanika više oblike kretanja- kretanja žive materije. Mehanika se deli na klasičnu mehaniku (Galileja i NJutna) - proučavaju se zakoni kretanja makroskopskih tela koja se kreću brzinama koje su male u poređenju sa brzinom svetlosti u vakuumu, v << c m/s, kvantnu mehaniku - zakoni kretanja makroskopskih tela koja se kreću brzinama koje su reda veličine c zasnovani na specijalnoj teoriji relativnosti (Ajnštajnova mehanika), v c. (Za opisivanje kretanja mikroskopskih tela kao što su pojedinačni atomi i elementarne čestice zakoni klasične mehanike su neprimenljivi).
5 Klasična mehanika proučava mehaničko kretanje uključujući i uzroke (sile) koje do njega dovode, i deli se na: kinematiku; dinamiku i statiku. Kinematika proučava kretanje tela ne razmatrajući uzroke koji to kretanje izazivaju. Dinamika proučava zakone kretanje tela i uzroke koje to kretanje izazivaju ili menjaju, a to znači da proučava dejstva sila na tela. Statika proučava zakone ravnoteže tela kada na njih deluje nekoliko sila. Ako su zakoni kretanja poznati moguće je utvrditi zakone ravnoteže - upravo zato fizika zakone statike ne razmatra odvojeno od zakona dinamike i svojsva tela.
6 Mehanika: proučava mehaničko kretanje uključujući i uzroke (sile) koje do njega dovode Cilj mehanike: Doći do dinamičkih jednačina, čijim se rešenjem mogu dobiti zakoni kretanja položaj, brzina i ubrzanje u svakom trenutku. Sile se smatraju poznatim Metode rešavanja dinamičkih jednačina: Analitičke Numeričke-uz pomoć aproksimativnih programa Delovi: Mehanika materijalne tačke Mehanika krutog tela Mehanika deformabilnog tela-(elastično i plastično telo) Mehanika Fluida Biomehanika = Mehanika živih sistema Kosti kruto telo Tkivo = deformabilno telo Krv = Fluid
, koji interaguju međusobno.")
7 FIZIČKI SISTEM Svako istraživanje u fizici je fokusirano na samo neki izdvojeni deo realnosti, koji se naziva fizički sistem. Fizički sistem je skup uzajamno povezanih fizičkih objekata (komponenata sistema), koji interaguju međusobno. Ako komponente fizičkog sistema interaguju sa okolinom kažemo da je to otvoren sistem ako ne interaguju sa okolinom kažemo da je to izolovan ili zatvoren sistem. Fizički sistemi pripadaju kako neživoj, tako i živoj prirodi. U biološkim sistemima susrećemo se sa nizom fizičkih procesa i fizičkih svojstava.
8 FIZIČKE VELIČINE Fizički sistem se karakteriše nizom fizičkih svojstava, kojima se pripisuju fizičke veličine, sa ciljem da se ta svojstva kvantifikuju. Svakom fizičkom svojstvu sistema se pripisuje određena fizička veličina, za koju se određuje jedinica mere i postupak njenog merenja. Pored fizičkih, postoje i nefizička svojstva fizičkih sistema, poput mirisa i ukusa, koja se ne mogu kvantifikovati (ne postoji jedinica mere mirisa, ukusa). Za razliku od matematičke veličine, koja je određena brojnom vrednošću, zapis vrednosti fizičke veličine sadrži brojnu vrednost, jedinicu mere i fizičku dimenziju. Primer: v = 7 m/s : 7 = brojna vrednost, m/s = jedinica mere, L/T (dužina kroz vreme) = fizička dimenzija
9 Fizički eksperiment Ispitivanje fizičkog sistema i pojava koje se odvijaju u njemu ima više faza: 1. Posmatranje pojave Formalno sagledavanje prirode pojave, cilj: identifikovanje fizičke veličina koje su relevantne za tu pojavu. Kretanje tela: pojava promene položaja tokom vremena; relevantne fizičke veličine su pređeni put i vreme. 2. Eksperimentalno ispitivanje pojave Eksperimentalna merenja fizičke veličina koje su relevantne za ispitivani fenomena, cilj: empirijski zakoni, tj. uspostavljanje veza između merenih fizičkih veličina, do kojih se dolazi analizom rezultata merenja v = s/t P=aT, V=const. (Šarlov zakon), V=bT, P=const. (Gej-Lisakov zakon) Eksperiment = merenje = interakcija merne sonde mernog uređaja i sistema Primer: Termometar merna sonda: rezervoar sa živom Naučni eksperiment = ponovljiv eksperiment.
10 Modelovanje fizičkih sistema Pod modelom u fizici podrazumevamo uprošćenu verziju nekog f izičkog sistema, koji bi bio komplikovan za analizu kada bi smo ga uzimali sa svim njegovim karakteristikama. Dva postupka modelovanja: Modelovanje fizičkog sistema => model fizičkog sistema Modelovanje (Modelovana simulacija) fizičkog procesa Modelovanje fizičkog sistema = razdvajanje bitnih od nebitnih svojstava sistema, koje je određeno unapred definisanim ciljem istraživanja, a ne svojstvima sistema kao takvog. Podela fizičkih svojstva na bitna i nebitna nije uslovljena samo osobinama fizičkog sistema, nego ciljem istraživanja. Kotrljanje lopte po stolu: boja lopte nebitno fizičko svojstvo Apsorpcija svetlosti na lopti: boja lopte bitno svojstvo Najjednostavniji fizički model = model kod kog se kao bitno izdvaja samo jedno svojstvo fizičkog sistema (Zemlja kao materijalna tačka - masa).
11 Referentni sistem, prostor stanja, materijalna tačka Ispitivanju svakog fizičkog sistema prethodi sagledavanje i određenje njegovog položaja u prostoru. Ne postoji apsolutni položaj, nego samo položaj u odnosu na neko unapred odabrano telo referentno telo. Položaj svakog fizičkog objekta se određuje relativno, tj. u odnosu na unapred izabrano referentno telo, za koji se vezuje koordinatni sistem. Referentni sistem je fizički pojam Koordinatni sistem je matematički pojam Dimenzije referentnog tela (širina, dužina, visina) moraju biti mnogo manje od rastojanja, koja se u odnosu na njega mere, tako da se ono može smatrati tačkom, koja se nalazi u koordinatnom početku referentnog sistema. Mesec, Zemlja! Avion, Zemlja! Za nas dimenzije tela = dimenzije ref. tela => telo = materijalna tačka Materijalna tačka je fizički pojam za geometrijski pojam tačka, kojem smo pridružili jedno od svojstava materijalnih tijela masu. Model materijalne tačke: zanemarujemo dimenzije datog tela i smatramo da ono ima samo masu. Dakle zadržavamo svojstvo inertnosti - okarakterisano masom sistema m

12 SLAGANJE BRZINA Sistem vezan za biciklistu koji rel.miruje Sistem vezan za voz Brzina voza u odnosu na biciklistu Položaj putnika u odnosu na oba referentna sistema Brzina voza u odnosu na biciklistu Brzina putnika u odnosu na biciklistu drp / dt A = drp / dt B + drb / dt A Brzina putnika u vozu
13 Inercijalni referentni sistem Ne postoji apsolutno mirovanje, tj. sva tela u Univerzumu se kreću jedna u odnosu na druga. Znači,... Svaki referentni sistem je vezan za referentno telo koje se kreće. Po načinu na koji se kreću, tela se mogu podeliti u dve osnovne grupe: Izolovana - slobodna tela Svako telo se kreće ravnomerno pravolinijski, ne menjajući ni brzinu, niti pravac kretanja. Na slobodno telo ne deluje ništa. Neizolovana tela. Delovanje drugih tela odražava se pre na način njegovog kretanja: Promena brzine Promena pravca kretanja. Inercijalni referentni sistem je vezan za (referentno) telo koje se kreće ravnomerno, ne menjajući brzinu i pravac kretanja. Svi inercijalni sistemi su ekvivalentni, tj. odvijanje fizičkih procesa ne zavise od izbora inercijalnog sistema. Neinercijalni referentni sistem je vezan za (referentno) telo koje se kreće neravnomerno menjajući brzinu i pravac kretanja. Svaki sistem koji je vezan za referentno telo koje se kreće neravnomerno ili krivolinijski je neinercijalan. Voz koji ubrzava, platforma koje se obrće --.
14 Prostor mehaničkih stanja Sve što se dešava, pa i svaki fizički proces, dešava se negde u prostoru i nekad u vremenu. Ispitivanje svakog fizičkog procesa (fenomena) započinje, pitanjima Gde u prostoru? i Kada u vremenu? Gde u prostoru - mereno u referentnom sistemu u odnosu na referentno telo, koje se nalazi u koordinatnom početku sistema. Kada u vremenu - mereno od datog početnog trenutka, jer vreme se meri u odnosu na neki unapred izabrani referentni trenutak - početni trenutak. Fizika se ne bavi fizičkim sistemima čija su svojstva nepromenljiva, sa kojima se ništa ne dešava. Fizika se bavi fenomenima, tj. procesima u kojima se dešavaju promene fizičkih svojstava i stanja fizičkih sistema. Najjednostavni fizički proces je mehaničko kretanje. To je proces tokom kog se menja mehaničko stanje sistema. Mehaničko stanje tela je u svakom trenutku vremena određeno vrednostima koordinata njegovog položaja u tom trenutku. Proces mehaničkog kretanja tela je svaki proces promene njegovog položaja, nezavisno od uzroka koji su do toga doveli.
15 Vreme i prostor u nerelativističkoj fizici: Prostor i vreme su nezavisni - nijedna osobina prostora ne zavisi od osobina vremena i obrnuto. Prostor i vreme su apsolutni - ne zavise od fizičkih svojstava objekata koji se u njima nalaze. Geometrija prostora je euklidska - uprošćeno rečeno, najkraće rastojanje između dve tačke u prostoru je prava linija. Vreme i prostor u relativističkoj fizici: Prostor i vreme nisu nezavisni - nerazdvojni su i čine tzv. prostorno-vremenski kontinuum. Prostor i vreme nisu apsolutni - zavise od fizičkih svojstava objekata, koji se u njima nalaze. Geometrija prostora nije euklidska - najkraće rastojanje između dve tačke u prostoru nije prava linija.
16 Određivanje položaja tela pomoću različitih koordinatnih sistema Y A(x,y) X Da bi se odredio položaj tela u ravni, najčešće se koristi Dekartov pravougli sistem sa dve promenljive A(x,y). Vektor položaja Dekartovom koordinatnom sistemu Da bi se odredio položaj tela u prostoru, možemo koristiti Dekartov pravougli koordinatni sistem sa tri promenljive A(x,y,z).
17 Koordinatni sistemi koji se koriste u okviru opšteg kursa fizike Z A Dekartov trodimenzionalni koordinatni sistem. Promenljive koje određuju položaj tačke u ovom koord. sistemu su: X,Y,Z. Cilindrični koordinatni sistem. Promenljive koje određuju položaj A((ρ, ϕ, z)
18 Položaj tela u prostoru možemo odrediti i korišćenjem Sferni koordinatni sistem (r, θ, ϕ) z r ϑ y Cilindrični koordinatni sistem u ravni (ρ, ϕ, z) ϕ x ϕ ρ


19
20 KINEMATIKA MATERIJALNE TAČKE Odredjivanje položaja materijalne tačke. Svojstva prostora i vremena Cilj izučavanja mehanike je: a) utvrđivanje uslova i uzroka koji dovode do promene stanja mehaničkog kretanja ili mirovanja b) da na osnovu poznatih uzroka, osobina materijalnih objekata i početnih uslova utvrdi opštu teorijsku metodologiju kojom će se uspešno opisati kretanje. Pod terminom opisivanja kretanja podrazumevamo određivanje: - trajektorije materijalnog objekta; - položaja materijalnog objekta u svakom trenutku kretanja; - pravca i smera kretanja materijalnog objekta u svakom trenutku kretanja; - brzine i ubrzanja materijalnog objekta u svakom trenutku kretanja. Pod trajektorijom podrazumevamo geometrijsko mesto tačaka u prostoru kroz koje materijalni objekat sukcesivno prolazi u procesu kretanja. Za određivanje položaja materijalnog objekta potrebno je odrediti tri nezavisna parametra: trajektorija, orijentacija trajektorije i referentna tačka. Prilikom izbora parametara vodimo računa da se posmatrano kretanje opiše što jednostavnije.
.")
21 Iz svakodnevnog iskustva imamo predstavu o kretanju, kao o neprekidnoj promeni u položaju nekog tela. Sva kretanja u fizici, možemo da kategorišemo u tri tipa kretanja: translatorno, rotaciono i vibraciono (oscilatorno). Automobil koji se kreće auto putem je primer translatornog kretanja, Zemljina rotacija oko sopstvene ose je primer rotacionog kretanja, a kretanje klatna vibracionog.
22 Odredjivanje položaja materijalne tačke Opisivanje kretanja prema načinu izbora parametara kretanja može biti: a) prirodno, b) vektorsko i c) koordinantno. a) Prirodni način opisivanja kretanja Bg Ni Parametre koja treba odrediti : trajektorija, orijentacija trajektorije ( --> + ) referentna tačka na trajektoriji (tačka O) položaj materijalne tačke u odnosu na referentnu tačku-lučnu kordinatu Kako se položaj materijalne tačke menja u vremenu to je i njena lučna koordinata funkcija vremena s = s(t), što predstavlja osnovnu kinematsku jednačinu kretanja pri prirodnom opisivanju kretanja.!!! Lučnu koordinatu ne treba poistovećivati sa pređenim putem materijalne tačke u toku kretanja S=AB.
23 Odredjivanje položaja materijalne tačke b) Vektorski način određivanja kretanja tačke Parametra koja treba odrediti : intezitet vektora položaja, pravac vektora položaja i smer vektora položaja. u prostoru izaberemo referentnu tačku i nazovemo je pol (tačka O). Položaj materijalne tačke M određen je vektorom s početkom u polu O i krajem u tački na trajektoriji gde se nalazi materijalna tačka-tačka M. Vektor položaja materijalne tačke. r Vektor položaja menja tokom vremena r = r( t) osnovna kinematska jednačina pri vektorskom opisivanju kretanja Trajektorija materijalne tačke -hodograf vektora položaja.(geometrijsko mesto tačaka kroz koje prolazi vrh toga vektora s fiksnim početkom).
24 Opisivanje kretanja prema načinu izbora parametara kretanja može biti: c) koordinantno. U Dekartovom sistemu koordinata položaj tačke A u datom momentu vremena u odnosu na taj sistem karakteriše se sa tri koordinate x, y, i z vektorom položaja r povučenim iz početka koordinatnog sistema do date tačke A Pri kretanju materijalne tačke njene koordinate se tokom vremena menjaju. U opštem slučaju njeno kretanje se određuje skalarnim jednačinama: (1.1) Koje su ekvivalentne vektorskoj jednačini Jednačina (1.1) i (1.2) predstavljaju kinematičke jadnačine kretanja materijalne tačke. r = xe + ye + z e r t A x y z (Još jednom napominjemo: obzirom da se sva tela kreću možemo govoriti samo o relativnom kretanju ili relativnom mirovanju. I pojam vremena je takođe relativan.) Broj nezavisnih koordinata koji potpuno određuju položaj tačke u prostoru naziva se stepen slobode. ( )
25 PUTANJA I BRZINA MATERIJALNE TAČKE Trajektorija materijalnog objekta pri procesu kretanja. Kriva A, A1, A2,... predstavlja putanju materijalne tačke geometrijsko mesto uzastopnih položaja. vektor položaja r= xi+ yj+ zk r t ( ) x(t) y(t) z(t) 3 skalarne jednačine su konačne jednačine kretanja r = x + y + z Jedinični vektori ex, ey, ez i, j, k e = e = e = 1 x y z Pitanje br. 1
26 Kretanje u dve ili tri dimenzije Primer kako se vektor položaja razlaže kada ga posmatramo u dvodimenzionalnom ili trodimenzionalnom koordinatnom sistemu. z A z r A Axyz (,, ) r () t = x () t i + y () t j M M M r A ( t ) = x x A e z e x x A ( t ) e x e y + y A ( t y A ) e y + z A y ( t ) e z
27 pauza
28 Kinematika
29 Osnovni pojmovi kinematike m
30 Osnovni pojmovi kinematike model materijalne tačke model apsolutno krutog tela
31 Kinematika translatornog kretanja
32 Vrste kretanja. Brzina. [ v] = m s v sr O x1 x 2 - x 1 x 2 v sr x v sr = x t x t
33 Trenutna brzina [km/h], [cm/s] milja na čas [mph],
34 Pomeraj i pređeni put nisu iste veličine Devojka je u vagonu, za 20s, načinila pomeraj je -10 m, a pređeni put je veći (ukupna dužina plave linije) u sistemu reference vezanom za vagon ako ga određujemo u odnosu na sistem reference vezan za prugu moramo da uračunamo i kretanje voza! s 3 s 1 s2 s s 1 3 s Putnik u vozu koji je napravio pomeraj x=-10 m za 20 sekundi. pređeni put s = x a + x b + x c + x d =16m 34 v sr x 10m = = = 0,5 m/ s t 20s
35 Srednja brzina v sr trenutna brzina v srednja brzina ne daje informaciju o tome šta se dešavalo imeđu x 1 i x 2. delimo ukupni pomeraj x tot, na delove x a, x b, što su manji delovi dobija se potpunija slika o kretanju kada se smanje jako puno i napravi odnos sa odgovarajućim vremenskim intervalom dobija se trenutna brzina v 35 v a xa xb =, vb =... t t a b v sr v t 0
36 Pravac i smer trenutne brzine: ( ) 2 2 2, cos z y x x v v i v x + + = = ( ) 2 2 2, cos z y x y v v j v y + + = = ( ) 2 2 2, cos z y x z v v k v z + + = = Vektor brzine ima tri komponente duž osa x, y, z: v x, v y, v z k dt dz j dt dy i dt dx dt dr v + + = = k v j v i v zk yj xi v z y x + + = + + = z y x v + + = Pravac brzine u odnosu na ose: Putanja tela Dakle, važan zaključak: U svakoj tački putanje tela, vektor trenutne brzine ima pravac tangente u datoj tački putanje. Intenzitet vektora brzine
37 Ubrzanje * Čita se: drugi izvod vektora pomeraja po vremenu. m s [ a] = 2 v = v v 2 1
38 Ubrzanje
39
40 Trenutno ubrzanje dr dx dy dz v = = i + j + k dt dt dt dt d a= ( vi ) x + vy j+ vk z dt dv dv x y dv z a = i + j + k dt dt dt a= ai x + ay j+ ak z a = a + a + a x y z Intenzitet vektora ubrzanja a a a x y z a = = i = dt dt dt = j = dt dt dt = k = dt dt dt 2 d dx d x 2 d dy d y 2 d dz d z dv dt = v = r Trenutno ubrzanje

41 Da bi našli trenutno Ubrzanje u... a P1... tražimo limes od Kada P 2 teži P 1... a sr Trenutno ubrzanje Trenutno ubrzanje tela se dobija kao limes srednjeg ubrzanja kada Δt teži nuli....smatrajući da v 0, t 0 Trenutno ubrzanje tačke orijentisano prema udubljenoj strani putanje
42 Za definisanje kretanja potrebno je poznavati neku od sledećih zavisnosti: Koriste se relacije: Prema obliku putanje kretanja materijalne tačke se dele na: pravolinijska krivolinijska Prema brzini i ubrzanju kretanja materijalne tačke se dele na: ravnomerna jednako ubrzana n e djednako ubrzana
 kretanje")
43 Jednodimenzionalno (pravolinijsko) kretanje ravnomerno kretanje
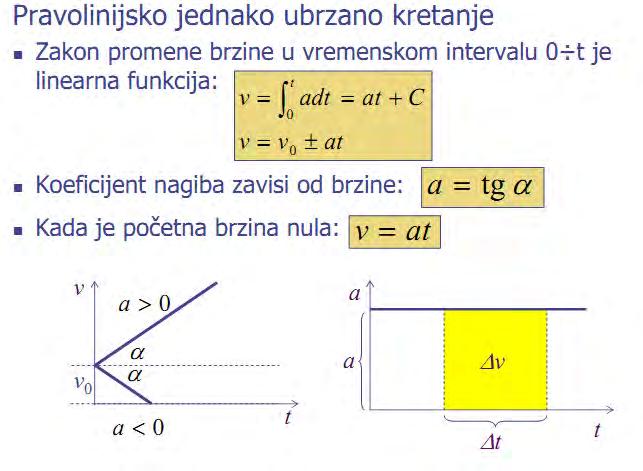
44 Pravolinijsko kretanje ravnomerno kretanje Koeficijent nagiba zavisi od brzine.
45 a=const
46 Jednako ubrzano pravolinijsko kretanje v = v 0 + a sr t v = 2 v0 + at = 70m / s + ( 1,5m / s )(40s) = 10m / s 46
47
48

49
50
51
52
53

54 Sabiranje brzina Reka nosi tela nizvodno,ili vetar nosi avion u smeru duvanja v t - brzina tela u odnosu na sredinu v s - brzina sredine v ukupna brzina tela je zbir ove dve brzine. v v t + v s 2 2 = v = v t + v s tanθ = v v t s 54
55 14. i 16. Octobar 2015 Kinematika rotacionog kretanja
56

57 a a τ n a τ tangencijalno ubrzanje a n normalno ubrzanje
58 τ a a = τ + a n a1 τ, a n, a, τ

")

59 Kinematika rotacionog kretanja (kružno kretanje) Rotaciono kretanje je kretanje prilikom koga se sve tačke tela kreću po kružnim putanjama čiji centri leže na osi rotacije. ukoliko je brzina tela konstantna, (linijska brzina konstantna, v=const), kretanje je uniformno kružno kretanje tačke koje rotiraju imaju različite (linijske = periferijske) brzine v jer se nalaze na različitoj udaljenosti od ose rotacije dalje se kreću brže. Osa rotacije O Ugao rotacije - θ, se pri ovakvom kretanju koristi da opiše pomeranje tela za dati interval vremena. 59
60 2 1
61 ako se izvrši rotacija za pun ugao, posmatrana tačka je prešla put jednak obimu kružnice 2 πr 2π r θ = = r ( θ = φ) 2π definicija radijana 2 π rad = 1 pun obrtaj = rad = = 57,3 2π 0 61 Svaka tačka na radijus vektoru će, za isti interval vremena t, preći isti ugao φ, ima smisla definisati novu veličinu koja reprezentuje brzinu rotacuje tela ω.
![[ω] =rad/s](/docs-images/63/50064508/images/62-1.jpg "radijan u")
62 [ω] =rad/s radijan u sekundi
63 (linijske)
64 [α] =rad/s 2 radijana u s 2
65 φ - ugaoni pomeraj n- broj obrtaja φ = 2π n v r 0 broj obrtaja u 1s = 1Hz ν je grčko slovo ni
66 =a cp r 0 r 0
67
68 Dodatni materijal/kinematika.pdf

69 Intenzitet centripetalnog ubrzanja Koliko je centripetalno ubrzanje automobila ako je poluprečnik kružnog toka 500 metara, a brzina automobila 25 m/s? Uporediti ovo ubrzanje sa ubrzanjem Zemljine teže. a c = v 2 /r=1,25 m/s 2 a c / g = 1,25/9,80=0,128 automobil u kružnom toku 69
(7854rad/s) 2 =4,63 10 6 m/s 2 a c / g = 4,72 10 5 472 000 gravitacionog ubrzanja")
70 Intenzitet centripetalnog ubrzanja Čestica se nalazi na 7,50 cm od ose rotacije ultracentrifuge koja pravi obrtaja u minuti. Odrediti odnos centripetalnog ubrzanja i gravitacionog. r= 7,50 cm ω= obr /min obr 2π rad 1min rad ω = = 7854 min obr 60s s a c = rω =(0,0750m)(7854rad/s) 2 =4, m/s 2 a c / g = 4, gravitacionog ubrzanja ultracentrifuga 70
71
PRAVA. Prava je u prostoru određena jednom svojom tačkom i vektorom paralelnim sa tom pravom ( vektor paralelnosti).
.") PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
PRAVA Prava je kao i ravan osnovni geometrijski ojam i ne definiše se. Prava je u rostoru određena jednom svojom tačkom i vektorom aralelnim sa tom ravom ( vektor aralelnosti). M ( x, y, z ) 3 Posmatrajmo
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET SIGNALI I SISTEMI. Zbirka zadataka
 UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
UNIVERZITET U NIŠU ELEKTRONSKI FAKULTET Goran Stančić SIGNALI I SISTEMI Zbirka zadataka NIŠ, 014. Sadržaj 1 Konvolucija Literatura 11 Indeks pojmova 11 3 4 Sadržaj 1 Konvolucija Zadatak 1. Odrediti konvoluciju
Ispitivanje toka i skiciranje grafika funkcija
 Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Ispitivanje toka i skiciranje grafika funkcija Za skiciranje grafika funkcije potrebno je ispitati svako od sledećih svojstava: Oblast definisanosti: D f = { R f R}. Parnost, neparnost, periodičnost. 3
Elementi spektralne teorije matrica
 Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
Elementi spektralne teorije matrica Neka je X konačno dimenzionalan vektorski prostor nad poljem K i neka je A : X X linearni operator. Definicija. Skalar λ K i nenula vektor u X se nazivaju sopstvena
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II
 1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
1 UPUTSTVO ZA IZRADU GRAFIČKOG RADA IZ MEHANIKE II Zadatak: Klipni mehanizam se sastoji iz krivaje (ekscentarske poluge) OA dužine R, klipne poluge AB dužine =3R i klipa kompresora B (ukrsne glave). Krivaja
3.1 Granična vrednost funkcije u tački
 3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
3 Granična vrednost i neprekidnost funkcija 2 3 Granična vrednost i neprekidnost funkcija 3. Granična vrednost funkcije u tački Neka je funkcija f(x) definisana u tačkama x za koje je 0 < x x 0 < r, ili
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1)
") Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
Inženjerska grafika geometrijskih oblika (5. predavanje, tema1) Prva godina studija Mašinskog fakulteta u Nišu Predavač: Dr Predrag Rajković Mart 19, 2013 5. predavanje, tema 1 Simetrija (Symmetry) Simetrija
Pismeni ispit iz matematike Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: ( ) + 1.
 + 1.") Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
Pismeni ispit iz matematike 0 008 GRUPA A Riješiti sistem jednačina i diskutovati rješenja sistema u zavisnosti od parametra: λ + z = Ispitati funkciju i nacrtati njen grafik: + ( λ ) + z = e Izračunati
1 Kinematika krutog tela
 M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, IV predavanje, 2017. 1 Kinematika krutog tela Kruto telo je sistem materijalnih tačaka čija se međusobna udaljenost ne menja tokom vremena. Kruta tela
M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, IV predavanje, 2017. 1 Kinematika krutog tela Kruto telo je sistem materijalnih tačaka čija se međusobna udaljenost ne menja tokom vremena. Kruta tela
( , 2. kolokvij)
") A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
A MATEMATIKA (0..20., 2. kolokvij). Zadana je funkcija y = cos 3 () 2e 2. (a) Odredite dy. (b) Koliki je nagib grafa te funkcije za = 0. (a) zadanu implicitno s 3 + 2 y = sin y, (b) zadanu parametarski
Pismeni ispit iz matematike GRUPA A 1. Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj, zatim naći 4 z.
 Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
Pismeni ispit iz matematike 06 007 Napisati u trigonometrijskom i eksponencijalnom obliku kompleksni broj z = + i, zatim naći z Ispitati funkciju i nacrtati grafik : = ( ) y e + 6 Izračunati integral:
numeričkih deskriptivnih mera.
 DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
DESKRIPTIVNA STATISTIKA Numeričku seriju podataka opisujemo pomoću Numeričku seriju podataka opisujemo pomoću numeričkih deskriptivnih mera. Pokazatelji centralne tendencije Aritmetička sredina, Medijana,
1 Ubrzanje u Dekartovom koordinatnom sistemu
 M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, II predavanje, 2017. 1 Ubrzanje u Dekartovom koordinatnom sistemu Posmatrajmo materijalnu tačku koja se kreće po trajektoriji prikazanoj na slici 1.
M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, II predavanje, 2017. 1 Ubrzanje u Dekartovom koordinatnom sistemu Posmatrajmo materijalnu tačku koja se kreće po trajektoriji prikazanoj na slici 1.
1 Vektor ubrzanja u prirodnom koordinatnom sistemu
 M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, III predavanje, 2017. 1 Vektor ubrzanja u prirodnom koordinatnom sistemu Posmatrajmo trajektoriju materijalne tačke prikazanu na slici 1. Smatramo
M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, III predavanje, 2017. 1 Vektor ubrzanja u prirodnom koordinatnom sistemu Posmatrajmo trajektoriju materijalne tačke prikazanu na slici 1. Smatramo
TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar
 TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar Prof. dr Stanko Br i Prof. dr Rastislav Mandi Doc. dr Stanko ori email: cstanko@grf.bg.ac.rs Graževinski fakultet Univerzitet u Beogradu k. god.
TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar Prof. dr Stanko Br i Prof. dr Rastislav Mandi Doc. dr Stanko ori email: cstanko@grf.bg.ac.rs Graževinski fakultet Univerzitet u Beogradu k. god.
SISTEMI NELINEARNIH JEDNAČINA
 SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
SISTEMI NELINEARNIH JEDNAČINA April, 2013 Razni zapisi sistema Skalarni oblik: Vektorski oblik: F = f 1 f n f 1 (x 1,, x n ) = 0 f n (x 1,, x n ) = 0, x = (1) F(x) = 0, (2) x 1 0, 0 = x n 0 Definicije
Osnovni primer. (Z, +,,, 0, 1) je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju
 je komutativan prsten sa jedinicom: množenje je distributivno prema sabiranju") RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
RAČUN OSTATAKA 1 1 Prsten celih brojeva Z := N + {} N + = {, 3, 2, 1,, 1, 2, 3,...} Osnovni primer. (Z, +,,,, 1) je komutativan prsten sa jedinicom: sabiranje (S1) asocijativnost x + (y + z) = (x + y)
Rad, snaga, energija. Tehnička fizika 1 03/11/2017 Tehnološki fakultet
 Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Rad, snaga, energija Tehnička fizika 1 03/11/2017 Tehnološki fakultet Rad i energija Da bi rad bio izvršen neophodno je postojanje sile. Sila vrši rad: Pri pomjeranju tijela sa jednog mjesta na drugo Pri
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A
, grupa A") Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
Kontrolni zadatak (Tačka, prava, ravan, diedar, poliedar, ortogonalna projekcija), grupa A Ime i prezime: 1. Prikazane su tačke A, B i C i prave a,b i c. Upiši simbole Î, Ï, Ì ili Ë tako da dobijeni iskazi
MEHANIKA FLUIDA. Isticanje kroz otvore sa promenljivim nivoom tečnosti
 MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
MEHANIKA FLUIDA Isticanje kroz otvore sa promenljivim nivoom tečnosti zadatak Prizmatična sud podeljen je vertikalnom pregradom, u kojoj je otvor prečnika d, na dve komore Leva komora je napunjena vodom
IZVODI ZADACI (I deo)
") IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
IZVODI ZADACI (I deo) Najpre da se podsetimo tablice i osnovnih pravila:. C`=0. `=. ( )`= 4. ( n )`=n n-. (a )`=a lna 6. (e )`=e 7. (log a )`= 8. (ln)`= ` ln a (>0) 9. = ( 0) 0. `= (>0) (ovde je >0 i a
Vektorska analiza doc. dr. Edin Berberović.
 Vektorska analiza doc. dr. Edin Berberović eberberovic@mf.unze.ba Vektorska analiza Vektorska algebra (ponavljanje) Vektorske funkcije (funkcije sa vektorima) Jednostavna analiza (diferenciranje) Učenje
Vektorska analiza doc. dr. Edin Berberović eberberovic@mf.unze.ba Vektorska analiza Vektorska algebra (ponavljanje) Vektorske funkcije (funkcije sa vektorima) Jednostavna analiza (diferenciranje) Učenje
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Mašinsko učenje. Regresija.
 Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
Mašinsko učenje. Regresija. Danijela Petrović May 17, 2016 Uvod Problem predviđanja vrednosti neprekidnog atributa neke instance na osnovu vrednosti njenih drugih atributa. Uvod Problem predviđanja vrednosti
Geometrija (I smer) deo 1: Vektori
 deo 1: Vektori") Geometrija (I smer) deo 1: Vektori Srdjan Vukmirović Matematički fakultet, Beograd septembar 2013. Vektori i linearne operacije sa vektorima Definicija Vektor je klasa ekvivalencije usmerenih duži. Kažemo
Geometrija (I smer) deo 1: Vektori Srdjan Vukmirović Matematički fakultet, Beograd septembar 2013. Vektori i linearne operacije sa vektorima Definicija Vektor je klasa ekvivalencije usmerenih duži. Kažemo
M086 LA 1 M106 GRP. Tema: Baza vektorskog prostora. Koordinatni sustav. Norma. CSB nejednakost
 M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
M086 LA 1 M106 GRP Tema: CSB nejednakost. 19. 10. 2017. predavač: Rudolf Scitovski, Darija Marković asistent: Darija Brajković, Katarina Vincetić P 1 www.fizika.unios.hr/grpua/ 1 Baza vektorskog prostora.
- pravac n je zadan s točkom T(2,0) i koeficijentom smjera k=2. (30 bodova)
 i koeficijentom smjera k=2. (30 bodova)") MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
MEHANIKA 1 1. KOLOKVIJ 04/2008. grupa I 1. Zadane su dvije sile F i. Sila F = 4i + 6j [ N]. Sila je zadana s veličinom = i leži na pravcu koji s koordinatnom osi x zatvara kut od 30 (sve komponente sile
Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika
 1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
1. Kinematika Mehanika je temeljna i najstarija grana fizike koja proučava zakone gibanja i meñudjelovanja tijela. kinematika, dinamika i statika Kinematika (grč. kinein = gibati) je dio mehanike koji
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović
 DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
DISKRETNA MATEMATIKA - PREDAVANJE 7 - Jovanka Pantović Novi Sad April 17, 2018 1 / 22 Teorija grafova April 17, 2018 2 / 22 Definicija Graf je ure dena trojka G = (V, G, ψ), gde je (i) V konačan skup čvorova,
Novi Sad god Broj 1 / 06 Veljko Milković Bulevar cara Lazara 56 Novi Sad. Izveštaj o merenju
 Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Broj 1 / 06 Dana 2.06.2014. godine izmereno je vreme zaustavljanja elektromotora koji je radio u praznom hodu. Iz gradske mreže 230 V, 50 Hz napajan je monofazni asinhroni motor sa dva brusna kamena. Kada
Računarska grafika. Rasterizacija linije
 Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
Računarska grafika Osnovni inkrementalni algoritam Drugi naziv u literaturi digitalni diferencijalni analizator (DDA) Pretpostavke (privremena ograničenja koja se mogu otkloniti jednostavnim uopštavanjem
IZVODI ZADACI ( IV deo) Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo
 Rešenje: Najpre ćemo logaritmovati ovu jednakost sa ln ( to beše prirodni logaritam za osnovu e) a zatim ćemo") IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
IZVODI ZADACI ( IV deo) LOGARITAMSKI IZVOD Logariamskim izvodom funkcije f(), gde je >0 i, nazivamo izvod logarima e funkcije, o jes: (ln ) f ( ) f ( ) Primer. Nadji izvod funkcije Najpre ćemo logarimovai
1 Afina geometrija. 1.1 Afini prostor. Definicija 1.1. Pod afinim prostorom nad poljem K podrazumevamo. A - skup taqaka
 1 Afina geometrija 11 Afini prostor Definicija 11 Pod afinim prostorom nad poljem K podrazumevamo svaku uređenu trojku (A, V, +): A - skup taqaka V - vektorski prostor nad poljem K + : A V A - preslikavanje
1 Afina geometrija 11 Afini prostor Definicija 11 Pod afinim prostorom nad poljem K podrazumevamo svaku uređenu trojku (A, V, +): A - skup taqaka V - vektorski prostor nad poljem K + : A V A - preslikavanje
41. Jednačine koje se svode na kvadratne
 . Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
. Jednačine koje se svode na kvadrane Simerične recipročne) jednačine Jednačine oblika a n b n c n... c b a nazivamo simerične jednačine, zbog simeričnosi koeficijenaa koeficijeni uz jednaki). k i n k
III VEŽBA: FURIJEOVI REDOVI
 III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
III VEŽBA: URIJEOVI REDOVI 3.1. eorijska osnova Posmatrajmo neki vremenski kontinualan signal x(t) na intervalu definisati: t + t t. ada se može X [ k ] = 1 t + t x ( t ) e j 2 π kf t dt, gde je f = 1/.
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama.
 Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
Apsolutno neprekidne raspodele Raspodele apsolutno neprekidnih sluqajnih promenljivih nazivaju se apsolutno neprekidnim raspodelama. a b Verovatno a da sluqajna promenljiva X uzima vrednost iz intervala
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
PARCIJALNI IZVODI I DIFERENCIJALI. Sama definicija parcijalnog izvoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je,
 PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
PARCIJALNI IZVODI I DIFERENCIJALI Sama definicija parcijalnog ivoda i diferencijala je malo teža, mi se njome ovde nećemo baviti a vi ćete je, naravno, naučiti onako kako vaš profesor ahteva. Mi ćemo probati
Elektrotehnički fakultet univerziteta u Beogradu 17.maj Odsek za Softversko inžinjerstvo
 Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Elektrotehnički fakultet univerziteta u Beogradu 7.maj 009. Odsek za Softversko inžinjerstvo Performanse računarskih sistema Drugi kolokvijum Predmetni nastavnik: dr Jelica Protić (35) a) (0) Posmatra
Iskazna logika 3. Matematička logika u računarstvu. novembar 2012
 Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
Iskazna logika 3 Matematička logika u računarstvu Department of Mathematics and Informatics, Faculty of Science,, Serbia novembar 2012 Deduktivni sistemi 1 Definicija Deduktivni sistem (ili formalna teorija)
2.1 Kinematika jednodimenzionog kretanja
 Glava 2 Kinematika Gde god da pogledamo oko nas, možemo da uočimo tela u kretanju (u fizici je uobičajeno a se kaže u stanju kretanja ). Čak i kada smo u stanju mirovanja, naše srce kuca i na taj način
Glava 2 Kinematika Gde god da pogledamo oko nas, možemo da uočimo tela u kretanju (u fizici je uobičajeno a se kaže u stanju kretanja ). Čak i kada smo u stanju mirovanja, naše srce kuca i na taj način
Klasifikacija blizu Kelerovih mnogostrukosti. konstantne holomorfne sekcione krivine. Kelerove. mnogostrukosti. blizu Kelerove.
 Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
Klasifikacija blizu Teorema Neka je M Kelerova mnogostrukost. Operator krivine R ima sledeća svojstva: R(X, Y, Z, W ) = R(Y, X, Z, W ) = R(X, Y, W, Z) R(X, Y, Z, W ) + R(Y, Z, X, W ) + R(Z, X, Y, W ) =
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Trigonometrijske jednačine i nejednačine. Zadaci koji se rade bez upotrebe trigonometrijskih formula. 00. FF cos x sin x
OM2 V3 Ime i prezime: Index br: I SAVIJANJE SILAMA TANKOZIDNIH ŠTAPOVA
 OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
OM V me i preime: nde br: 1.0.01. 0.0.01. SAVJANJE SLAMA TANKOZDNH ŠTAPOVA A. TANKOZDN ŠTAPOV PROZVOLJNOG OTVORENOG POPREČNOG PRESEKA Preposavka: Smičući napon je konsanan po debljini ida (duž pravca upravnog
Zavrxni ispit iz Matematiqke analize 1
 Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Građevinski fakultet Univerziteta u Beogradu 3.2.2016. Zavrxni ispit iz Matematiqke analize 1 Prezime i ime: Broj indeksa: 1. Definisati Koxijev niz. Dati primer niza koji nije Koxijev. 2. Dat je red n=1
Matematika 1 - vježbe. 11. prosinca 2015.
 Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
Matematika - vježbe. prosinca 5. Stupnjevi i radijani Ako je kut φ jednak i rad, tada je veza između i 6 = Zadatak.. Izrazite u stupnjevima: a) 5 b) 7 9 c). d) 7. a) 5 9 b) 7 6 6 = = 5 c). 6 8.5 d) 7.
M. Tadić, Predavanja iz Fizike 1, ETF, grupa P3, VII predavanje, 2017.
 M. Tadić, Predavanja iz Fizike 1, ETF, grupa P3, VII predavanje, 2017. Konzervativne sile i potencijalna energija 1 Konzervativne sile Definicija konzervativne sile. Sila je konzervativna ako rad te sile
M. Tadić, Predavanja iz Fizike 1, ETF, grupa P3, VII predavanje, 2017. Konzervativne sile i potencijalna energija 1 Konzervativne sile Definicija konzervativne sile. Sila je konzervativna ako rad te sile
OBRTNA TELA. Vladimir Marinkov OBRTNA TELA VALJAK
 OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
OBRTNA TELA VALJAK P = 2B + M B = r 2 π M = 2rπH V = BH 1. Zapremina pravog valjka je 240π, a njegova visina 15. Izračunati površinu valjka. Rešenje: P = 152π 2. Površina valjka je 112π, a odnos poluprečnika
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: = a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije = a + b + c je parabola. Najpre ćemo naučiti kako
FTN Novi Sad Katedra za motore i vozila. Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila: MAKSIMALNA BRZINA
 : MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
: MAKSIMALNA BRZINA Maksimalna brzina kretanja F O (N) F OI i m =i I i m =i II F Oid Princip određivanja v MAX : Drugi Njutnov zakon Dokle god je: F O > ΣF otp vozilo ubrzava Kada postane: F O = ΣF otp
Teorijske osnove informatike 1
 Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
Teorijske osnove informatike 1 9. oktobar 2014. () Teorijske osnove informatike 1 9. oktobar 2014. 1 / 17 Funkcije Veze me du skupovima uspostavljamo skupovima koje nazivamo funkcijama. Neformalno, funkcija
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f
 D f") IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f IspitivaƬe funkcija: 1. Oblast definisanosti funkcije (ili domen funkcije) D f 2. Nule i znak funkcije; presek sa y-osom IspitivaƬe
5.5 Osobine prostora i vremena u klasičnoj mehanici i njihova veza sa zakonima održanja Simetrije prostora i vremena...
 Sadržaj 1 Kinematika 9 1.1 Koordinatni sistemi u ravni................... 9 1.2 Brzina u diferencijalnoj formi.................. 11 1.3 Predjeni put............................ 14 1.4 Ubrzanje u diferencijalnoj
Sadržaj 1 Kinematika 9 1.1 Koordinatni sistemi u ravni................... 9 1.2 Brzina u diferencijalnoj formi.................. 11 1.3 Predjeni put............................ 14 1.4 Ubrzanje u diferencijalnoj
Kurs. Autor Nešic Lj.
 Kurs Teorija relativnosti Autor Nešic Lj. Sadržaj 1 Kinematika 9 1.1 Koordinatni sistemi u ravni................... 9 1.2 Brzina u diferencijalnoj formi.................. 11 1.3 Predjeni put............................
Kurs Teorija relativnosti Autor Nešic Lj. Sadržaj 1 Kinematika 9 1.1 Koordinatni sistemi u ravni................... 9 1.2 Brzina u diferencijalnoj formi.................. 11 1.3 Predjeni put............................
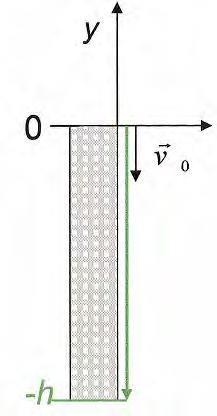
Silu trenja osećaju sva tela koja se nalaze u blizini Zemlje i zbog nje tela koja se puste padaju nadole. Ako pustimo telo da slobodno pada, ono će
 Silu trenja osećaju sva tela koja se nalaze u blizini Zemlje i zbog nje tela koja se puste padaju nadole. Ako pustimo telo da slobodno pada, ono će se bez obzira na masu kretati istim ubrzanjem Zanimljivo
Silu trenja osećaju sva tela koja se nalaze u blizini Zemlje i zbog nje tela koja se puste padaju nadole. Ako pustimo telo da slobodno pada, ono će se bez obzira na masu kretati istim ubrzanjem Zanimljivo
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15
 1 / 15") MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
MATRICE I DETERMINANTE - formule i zadaci - (Matrice i determinante) 1 / 15 Matrice - osnovni pojmovi (Matrice i determinante) 2 / 15 (Matrice i determinante) 2 / 15 Matrice - osnovni pojmovi Matrica reda
RAD, SNAGA I ENERGIJA
 RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
RAD, SNAGA I ENERGIJA SADRŢAJ 1. MEHANIĈKI RAD SILE 2. SNAGA 3. MEHANIĈKA ENERGIJA a) Kinetiĉka energija b) Potencijalna energija c) Ukupna energija d) Rad kao mera za promenu energije 4. ZAKON ODRŢANJA
Geometrija (I smer) deo 2: Afine transformacije
 deo 2: Afine transformacije") Geometrija (I smer) deo 2: Afine transformacije Srdjan Vukmirović Matematički fakultet, Beograd septembar 2013. Transformacije koordinata tačaka Transformacije koordinata tačaka Pretpostavimo da za bazne
Geometrija (I smer) deo 2: Afine transformacije Srdjan Vukmirović Matematički fakultet, Beograd septembar 2013. Transformacije koordinata tačaka Transformacije koordinata tačaka Pretpostavimo da za bazne
Zadatak 1 Dokazati da simetrala ugla u trouglu deli naspramnu stranu u odnosu susednih strana.
 Zadatak 1 Dokazati da simetrala ugla u trouglu deli naspramnu stranu u odnosu susednih strana. Zadatak 2 Dokazati da se visine trougla seku u jednoj tački ortocentar. 1 Dvostruki vektorski proizvod Važi
Zadatak 1 Dokazati da simetrala ugla u trouglu deli naspramnu stranu u odnosu susednih strana. Zadatak 2 Dokazati da se visine trougla seku u jednoj tački ortocentar. 1 Dvostruki vektorski proizvod Važi
TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar
 TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar Prof. dr Stanko Br i Prof. dr Rastislav Mandi Doc. dr Stanko ori email: cstanko@grf.bg.ac.rs Graževinski fakultet Univerzitet u Beogradu k. god.
TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar Prof. dr Stanko Br i Prof. dr Rastislav Mandi Doc. dr Stanko ori email: cstanko@grf.bg.ac.rs Graževinski fakultet Univerzitet u Beogradu k. god.
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI)
") IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
IZRAČUNAVANJE POKAZATELJA NAČINA RADA NAČINA RADA (ISKORIŠĆENOSTI KAPACITETA, STEPENA OTVORENOSTI RADNIH MESTA I NIVOA ORGANIZOVANOSTI) Izračunavanje pokazatelja načina rada OTVORENOG RM RASPOLOŽIVO RADNO
I.13. Koliki je napon između neke tačke A čiji je potencijal 5 V i referentne tačke u odnosu na koju se taj potencijal računa?
 TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TET I.1. Šta je Kulonova sila? elektrostatička sila magnetna sila c) gravitaciona sila I.. Šta je elektrostatička sila? sila kojom međusobno eluju naelektrisanja u mirovanju sila kojom eluju naelektrisanja
TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar
 TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar Prof. dr Stanko Br i Prof. dr Rastislav Mandi Doc. dr Stanko ori email: cstanko@grf.bg.ac.rs Graževinski fakultet Univerzitet u Beogradu k. god.
TEHNIƒKA MEHANIKA 2 Osnovne akademske studije, III semestar Prof. dr Stanko Br i Prof. dr Rastislav Mandi Doc. dr Stanko ori email: cstanko@grf.bg.ac.rs Graževinski fakultet Univerzitet u Beogradu k. god.
Drugi zakon termodinamike
 Drugi zakon termodinamike Uvod Drugi zakon termodinamike nije univerzalni prirodni zakon, ne važi za sve sisteme, naročito ne za neobične sisteme (mikrouslovi, svemirski uslovi). Zasnovan je na zajedničkom
Drugi zakon termodinamike Uvod Drugi zakon termodinamike nije univerzalni prirodni zakon, ne važi za sve sisteme, naročito ne za neobične sisteme (mikrouslovi, svemirski uslovi). Zasnovan je na zajedničkom
APROKSIMACIJA FUNKCIJA
 APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
APROKSIMACIJA FUNKCIJA Osnovni koncepti Gradimir V. Milovanović MF, Beograd, 14. mart 2011. APROKSIMACIJA FUNKCIJA p.1/46 Osnovni problem u TA Kako za datu funkciju f iz velikog prostora X naći jednostavnu
Trigonometrija 2. Adicijske formule. Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto
 Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
Trigonometrija Adicijske formule Formule dvostrukog kuta Formule polovičnog kuta Pretvaranje sume(razlike u produkt i obrnuto Razumijevanje postupka izrade složenijeg matematičkog problema iz osnova trigonometrije
OTPORNOST MATERIJALA
 3/8/03 OTPORNOST ATERIJALA Naponi ANALIZA NAPONA Jedinica u Si-sistemu je Paskal (Pa) Pa=N/m Pa=0 6 Pa GPa=0 9 Pa F (N) kn/cm =0 Pa N/mm =Pa Jedinična površina (m ) U tečnostima pritisak jedinica bar=0
3/8/03 OTPORNOST ATERIJALA Naponi ANALIZA NAPONA Jedinica u Si-sistemu je Paskal (Pa) Pa=N/m Pa=0 6 Pa GPa=0 9 Pa F (N) kn/cm =0 Pa N/mm =Pa Jedinična površina (m ) U tečnostima pritisak jedinica bar=0
Ispit održan dana i tačka A ( 3,3, 4 ) x x + 1
 x x + 1") Ispit održan dana 9 0 009 Naći sve vrijednosti korjena 4 z ako je ( ) 8 y+ z Data je prava a : = = kroz tačku A i okomita je na pravu a z = + i i tačka A (,, 4 ) Naći jednačinu prave b koja prolazi ( +
Ispit održan dana 9 0 009 Naći sve vrijednosti korjena 4 z ako je ( ) 8 y+ z Data je prava a : = = kroz tačku A i okomita je na pravu a z = + i i tačka A (,, 4 ) Naći jednačinu prave b koja prolazi ( +
TAČKA i PRAVA. , onda rastojanje između njih računamo po formuli C(1,5) d(b,c) d(a,b)
 d(b,c) d(a,b)") TAČKA i PRAVA Najpre ćemo se upoznati sa osnovnim formulama i njihovom primenom.. Rastojanje između dve tačke Ako su nam date tačke Ax (, y) i Bx (, y ), onda rastojanje između njih računamo po formuli
TAČKA i PRAVA Najpre ćemo se upoznati sa osnovnim formulama i njihovom primenom.. Rastojanje između dve tačke Ako su nam date tačke Ax (, y) i Bx (, y ), onda rastojanje između njih računamo po formuli
UNIVERZITET U BANJOJ LUCI MAŠINSKI FAKULTET
 UNIVERZITET U BANJOJ LUCI MAŠINSKI FAKULTET Dr Valentina Golubović - Bugarski MEHANIKA (Skripta izvodi predavanja) Banja Luka, februar 017. 1 PREDGOVOR Ova skripta priređena su prema važećem nastavnom
UNIVERZITET U BANJOJ LUCI MAŠINSKI FAKULTET Dr Valentina Golubović - Bugarski MEHANIKA (Skripta izvodi predavanja) Banja Luka, februar 017. 1 PREDGOVOR Ova skripta priređena su prema važećem nastavnom
Operacije s matricama
 Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Linearna algebra I Operacije s matricama Korolar 3.1.5. Množenje matrica u vektorskom prostoru M n (F) ima sljedeća svojstva: (1) A(B + C) = AB + AC, A, B, C M n (F); (2) (A + B)C = AC + BC, A, B, C M
Polarne, cilindrične, sferne koordinate. 3D Math Primer for Graphics & Game Development
 Polarne, cilindrične, sferne koordinate 3D Math Primer for Graphics & Game Development Polarni koordinatni sistem 2D polarni koordinatni sistem ima koordinatni početak (pol), koji predstavlja centar koordinatnog
Polarne, cilindrične, sferne koordinate 3D Math Primer for Graphics & Game Development Polarni koordinatni sistem 2D polarni koordinatni sistem ima koordinatni početak (pol), koji predstavlja centar koordinatnog
M. Tadić, Predavanja iz Fizike 1, ETF, grupa P3, VI predavanje, 2017.
 M. Tadić, Predavanja iz Fizike 1, ETF, grupa P3, VI predavanje, 2017. 1 Kretanje neslobodne materijalne tačke Telo može biti primorano da se kreće po površi ili liniji. Takav oblik kretanja naziva se neslobodno
M. Tadić, Predavanja iz Fizike 1, ETF, grupa P3, VI predavanje, 2017. 1 Kretanje neslobodne materijalne tačke Telo može biti primorano da se kreće po površi ili liniji. Takav oblik kretanja naziva se neslobodno
Analitička geometrija
 1 Analitička geometrija Neka su dati vektori a = a 1 i + a j + a 3 k = (a 1, a, a 3 ), b = b 1 i + b j + b 3 k = (b 1, b, b 3 ) i c = c 1 i + c j + c 3 k = (c 1, c, c 3 ). Skalarni proizvod vektora a i
1 Analitička geometrija Neka su dati vektori a = a 1 i + a j + a 3 k = (a 1, a, a 3 ), b = b 1 i + b j + b 3 k = (b 1, b, b 3 ) i c = c 1 i + c j + c 3 k = (c 1, c, c 3 ). Skalarni proizvod vektora a i
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA
 II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
II. ODREĐIVANJE POLOŽAJA TEŽIŠTA Poožaj težišta vozia predstavja jednu od bitnih konstruktivnih karakteristika vozia s obzirom da ova konstruktivna karakteristika ima veiki uticaj na vučne karakteristike
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri
 Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
Betonske konstrukcije 1 - vežbe 3 - Veliki ekscentricitet -Dodatni primeri 1 1 Zadatak 1b Čisto savijanje - vezano dimenzionisanje Odrediti potrebnu površinu armature za presek poznatih dimenzija, pravougaonog
y = f(m) ili y = f(x 1, x 2,...,x n ). (1.1)
 ili y = f(x 1, x 2,...,x n ). (1.1)") Glava 1 Teorija polja U matematičkoj teoriji polja 1 ne izučava se fizički smisao neke veličine koja je zadata u datom polju. Izučavaju se samo opšta svojstva polja koja se kasnije, u fizici i drugim oblastima,
Glava 1 Teorija polja U matematičkoj teoriji polja 1 ne izučava se fizički smisao neke veličine koja je zadata u datom polju. Izučavaju se samo opšta svojstva polja koja se kasnije, u fizici i drugim oblastima,
KVADRATNA FUNKCIJA. Kvadratna funkcija je oblika: Kriva u ravni koja predstavlja grafik funkcije y = ax + bx + c. je parabola.
 KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije a + b + c je parabola. Najpre ćemo naučiti kako izgleda
KVADRATNA FUNKCIJA Kvadratna funkcija je oblika: a + b + c Gde je R, a 0 i a, b i c su realni brojevi. Kriva u ravni koja predstavlja grafik funkcije a + b + c je parabola. Najpre ćemo naučiti kako izgleda
DINAMIKA. (Njutnovi zakoni, Ravnomerno kružno kretanje, inercijalne sile, dinamika rotacije)
") DINAMIKA (Njutnovi zakoni, Ravnomerno kružno kretanje, inercijalne sile, dinamika rotacije) 1. a) Koliku masu ima olovna kugla prečnika 2 cm? Gustina olova je 11300 kg/m 3. Koliki je impuls te kugle ako
DINAMIKA (Njutnovi zakoni, Ravnomerno kružno kretanje, inercijalne sile, dinamika rotacije) 1. a) Koliku masu ima olovna kugla prečnika 2 cm? Gustina olova je 11300 kg/m 3. Koliki je impuls te kugle ako
PP-talasi sa torzijom
 PP-talasi sa torzijom u metrički-afinoj gravitaciji Vedad Pašić i Dmitri Vassiliev V.Pasic@bath.ac.uk D.Vassiliev@bath.ac.uk Department of Mathematics University of Bath PP-talasi sa torzijom p. 1/1 Matematički
PP-talasi sa torzijom u metrički-afinoj gravitaciji Vedad Pašić i Dmitri Vassiliev V.Pasic@bath.ac.uk D.Vassiliev@bath.ac.uk Department of Mathematics University of Bath PP-talasi sa torzijom p. 1/1 Matematički
ELEKTROTEHNIČKI ODJEL
 MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
MATEMATIKA. Neka je S skup svih živućih državljana Republike Hrvatske..04., a f preslikavanje koje svakom elementu skupa S pridružuje njegov horoskopski znak (bez podznaka). a) Pokažite da je f funkcija,
10. STABILNOST KOSINA
 MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
MEHANIKA TLA: Stabilnot koina 101 10. STABILNOST KOSINA 10.1 Metode proračuna koina Problem analize tabilnoti zemljanih maa vodi e na određivanje odnoa između rapoložive mičuće čvrtoće i proečnog mičućeg
SLOŽENO KRETANJE TAČKE
 SLOŽENO KRETANJE TAČKE DEFINISANJE SLOŽENOG KRETANJA TAČKE BRZINA TAČKE PRI SLOŽENOM KRETANJU a) Relativna bzina b) Penosna bzina c) Apsolutna bzina d) Odeđivanje zavisnosti apsolutne od elativne i penosne
SLOŽENO KRETANJE TAČKE DEFINISANJE SLOŽENOG KRETANJA TAČKE BRZINA TAČKE PRI SLOŽENOM KRETANJU a) Relativna bzina b) Penosna bzina c) Apsolutna bzina d) Odeđivanje zavisnosti apsolutne od elativne i penosne
Cauchyjev teorem. Postoji više dokaza ovog teorema, a najjednostvniji je uz pomoć Greenove formule: dxdy. int C i Cauchy Riemannovih uvjeta.
 auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
auchyjev teorem Neka je f-ja f (z) analitička u jednostruko (prosto) povezanoj oblasti G, i neka je zatvorena kontura koja čitava leži u toj oblasti. Tada je f (z)dz = 0. Postoji više dokaza ovog teorema,
Reverzibilni procesi
 Reverzbln proces Reverzbln proces: proces pr koja sste nkada nje vše od beskonačno ale vrednost udaljen od ravnoteže, beskonačno ala proena spoljašnjh uslova ože vratt sste u blo koju tačku, proena ože
Reverzbln proces Reverzbln proces: proces pr koja sste nkada nje vše od beskonačno ale vrednost udaljen od ravnoteže, beskonačno ala proena spoljašnjh uslova ože vratt sste u blo koju tačku, proena ože
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu
 Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Analitička geometrija 1. Tačka 1. MF000 Neka su A(1, 1) i B(,11) tačke u koordinatnoj ravni Oxy. Ako tačka S deli duž AB
Zadaci sa prethodnih prijemnih ispita iz matematike na Beogradskom univerzitetu Analitička geometrija 1. Tačka 1. MF000 Neka su A(1, 1) i B(,11) tačke u koordinatnoj ravni Oxy. Ako tačka S deli duž AB
Matematika 1 { fiziqka hemija
 UNIVERZITET U BEOGRADU MATEMATIQKI FAKULTET Matematika 1 { fiziqka hemija Vektori Tijana Xukilovi 29. oktobar 2015 Definicija vektora Definicija 1.1 Vektor je klasa ekvivalencije usmerenih dui koje imaju
UNIVERZITET U BEOGRADU MATEMATIQKI FAKULTET Matematika 1 { fiziqka hemija Vektori Tijana Xukilovi 29. oktobar 2015 Definicija vektora Definicija 1.1 Vektor je klasa ekvivalencije usmerenih dui koje imaju
Konstruisanje. Dobro došli na... SREDNJA MAŠINSKA ŠKOLA NOVI SAD DEPARTMAN ZA PROJEKTOVANJE I KONSTRUISANJE
 Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Dobro došli na... Konstruisanje GRANIČNI I KRITIČNI NAPON slajd 2 Kritični naponi Izazivaju kritične promene oblika Delovi ne mogu ispravno da vrše funkciju Izazivaju plastične deformacije Može doći i
Program testirati pomoću podataka iz sledeće tabele:
 Deo 2: Rešeni zadaci 135 Vrednost integrala je I = 2.40407 42. Napisati program za izračunavanje koeficijenta proste linearne korelacije (Pearsonovog koeficijenta) slučajnih veličina X = (x 1,..., x n
Deo 2: Rešeni zadaci 135 Vrednost integrala je I = 2.40407 42. Napisati program za izračunavanje koeficijenta proste linearne korelacije (Pearsonovog koeficijenta) slučajnih veličina X = (x 1,..., x n
1 Osnovni problemi dinamike materijalne tačke
 M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, V predavanje, 2017. 0.1 III Njutnov zakon Posmatrajmo dva tela za koja smatramo da su materijalne tačke. Ove dve čestice međusobno interaguju tako
M. Tadić, Predavanja iz Fizike 1, ETF, grupe P2 i P3, V predavanje, 2017. 0.1 III Njutnov zakon Posmatrajmo dva tela za koja smatramo da su materijalne tačke. Ove dve čestice međusobno interaguju tako
1 Promjena baze vektora
 Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
Promjena baze vektora Neka su dane dvije različite uredene baze u R n, označimo ih s A = (a, a,, a n i B = (b, b,, b n Svaki vektor v R n ima medusobno različite koordinatne zapise u bazama A i B Zapis
2 tg x ctg x 1 = =, cos 2x Zbog četvrtog kvadranta rješenje je: 2 ctg x
 Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Zadatak (Darjan, medicinska škola) Izračunaj vrijednosti trigonometrijskih funkcija broja ako je 6 sin =,,. 6 Rješenje Ponovimo trigonometrijske funkcije dvostrukog kuta! Za argument vrijede sljedeće formule:
Osnovne teoreme diferencijalnog računa
 Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Osnovne teoreme diferencijalnog računa Teorema Rolova) Neka je funkcija f definisana na [a, b], pri čemu važi f je neprekidna na [a, b], f je diferencijabilna na a, b) i fa) fb). Tada postoji ξ a, b) tako
Drugi deo (uvoda) Vektori
 Vektori") Drugi deo (uvoda) Vektori Vektori i skalari Skalar je običan broj. Vektor je lista (uređena n-torka) skalara (komponente vektora). Pomeranje (recimo, 10 koraka prema zapadu) izražavamo vektorom. Rastojanje
Drugi deo (uvoda) Vektori Vektori i skalari Skalar je običan broj. Vektor je lista (uređena n-torka) skalara (komponente vektora). Pomeranje (recimo, 10 koraka prema zapadu) izražavamo vektorom. Rastojanje
5 Ispitivanje funkcija
 5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
5 Ispitivanje funkcija 3 5 Ispitivanje funkcija Ispitivanje funkcije pretodi crtanju grafika funkcije. Opšti postupak ispitivanja funkcija koje su definisane eksplicitno y = f() sadrži sledeće elemente:
SOPSTVENE VREDNOSTI I SOPSTVENI VEKTORI LINEARNOG OPERATORA I KVADRATNE MATRICE
 1 SOPSTVENE VREDNOSTI I SOPSTVENI VEKTORI LINEARNOG OPERATORA I KVADRATNE MATRICE Neka je (V, +,, F ) vektorski prostor konačne dimenzije i neka je f : V V linearno preslikavanje. Definicija. (1) Skalar
1 SOPSTVENE VREDNOSTI I SOPSTVENI VEKTORI LINEARNOG OPERATORA I KVADRATNE MATRICE Neka je (V, +,, F ) vektorski prostor konačne dimenzije i neka je f : V V linearno preslikavanje. Definicija. (1) Skalar
Ponašanje pneumatika pod dejstvom bočne sile
 Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
Ponašanje pneumatika pod dejstvom bočne sile POVOĐENJE TOČKA Dejstvo bočne sile pravac kretanja pod uglom u odnosu na pravac uzdužne ravni pneumatika BOČNA SILA PAVAC KETANJA PAVAC UZDUŽNE AVNI PNEUMATIKA
VEKTORI. Opera u Sidneju, Australija
 VEKTORI Ciljevi poglavlja Sabiranje i razlaganje vektora na komponente, množenje i deljenje vektora skalarom Predstavljanje vektora u Dekartovom koordinatnom sistemu i operacije sa vektorima koji su izraženi
VEKTORI Ciljevi poglavlja Sabiranje i razlaganje vektora na komponente, množenje i deljenje vektora skalarom Predstavljanje vektora u Dekartovom koordinatnom sistemu i operacije sa vektorima koji su izraženi
5. Karakteristične funkcije
 5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
5. Karakteristične funkcije Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2018 Milan Merkle Karakteristične funkcije ETF Beograd 1 / 10 Definicija Karakteristična
OSNOVI ELEKTRONIKE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA
 ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan
ELEKTROTEHNIČKI FAKULTET U BEOGRADU KATEDRA ZA ELEKTRONIKU OSNOVI ELEKTRONIKE SVI ODSECI OSIM ODSEKA ZA ELEKTRONIKU LABORATORIJSKE VEŽBE VEŽBA BROJ 1 OSNOVNA KOLA SA DIODAMA Autori: Goran Savić i Milan