|
|
|
- Λευί Δασκαλοπούλου
- 8 χρόνια πριν
- Προβολές:
Transcript

1
2
3
4
5
6
7
8 ϕ n n
9 n
10
11 n = 1,..., N
12 n n
13 {X I, Y I } {X r, Y r }
14 (x c, y c ) q r = x a y a θ X r = [x r, y r, θ r ] X I = [x I, y I, θ I ] X I = R(θ)X r R(θ) R(θ) = cosθ sinθ 0 sinθ cosθ Ẋ I = R(θ)Ẋr
15 y r ẏa r = 0 ẋ a sinθ + ẏ a cosθ = 0 θ R, θ L u DR = R θ R u DL = R θ L R ẋ DR = ẋ a + L θcosθ ẋ DL = ẋ a L θcosθ ẏ DR = ẏ a + L θsinθ ẏ DL = ẏ a L θsinθ
16 ẋ a cosθ + ẏ a sinθ + θl R θ R = 0 ẋ a cosθ + ẏ a sinθ θl R θ L = 0 sinθ cosθ cosθ sinθ L R 0 cosθ sinθ L 0 R ẋ a ẏ ȧ θ θ R θ L = Λ(q) q = 0 u = u r + u L 2 = R θ R + θ L 2 ω = u r u L 2L = R θ R θ L. 2 ẋ r a = u, ẏ r a = 0, θ = ω q I = R cosθ R cosθ 2 2 R sinθ R sinθ 2 2 R 2L R 2L [ ] θr θ L
![q I = ẋ r a ẏ r a θ = cosθ 0 [ sinθ 0 u ω 0 1 ] u [ u max, u max ] ω [ u max, u max ] ω](/docs-images/63/50342756/images/17-0.jpg "= u r L L L u L ω max ux = ±ω max u x L u max ωx = ±u max L ω x (ω u) = ± 1 L (u ± u")
17 q I = ẋ r a ẏ r a θ = cosθ 0 [ sinθ 0 u ω 0 1 ] u [ u max, u max ] ω [ u max, u max ] ω = u r L L L u L ω max ux = ±ω max u x L u max ωx = ±u max L ω x (ω u) = ± 1 L (u ± u max)
18 C I X c Y c f C Z c P = (X, Y, Z) p = (x, y) x = f X Z, y = f Y Z (R 3 R 2 ) I P p CP I W H (w, h) (x, y) I (X, Y, Z) w = x p w + w 0 = f p w X Z + w 0 h = y p h + h 0 = f p h Y Z + h 0 p w, p h (w 0, h 0 ) Z c I
19 I w, p w, f X c Z c θ w W θ w 2 = arctan p 2 w f W 2 θ w = 2arctan p w f (X i, Y i, Z i ) P i P j P j C P i p i
20 p i p i I P i (w i, h i ) P i X i = (w i w 0 )p w Z i f Y i = (h i h 0 )p h Z i f CP i P i C Y i Y 0 Z i = fy 0 (h i h 0 )p h X i = (w i w 0 )p w Z i f
21 R j R i R j l ij β ij (u i, ω i ) R i l ij P i, P j ϕ ij R j P I, P j l ij = Z 2 i + X2 i ϕ ij = atan2(z i, X i ) π 2 l ij = (x i x j ) 2 + (y i y j ) 2 ϕ ij = atan2(y i y j, x i x j ) θ j l ij = u i cos(ϕ ij + θ j θ i ) u j cosϕ ij ϕ ij = u isin(ϕ ij + θ j θ i ) u j cosϕ ij l ij ω j
22 l ij ϕ ij θ i θ j u i ω i = u i cos(ϕ ij + θ j θ i ) u j cosϕ ij u i sin(ϕ ij +θ j θ i ) u j cosϕ ij l ij ω i ω j 0 0 ω j + m(t) ẋ(t) = f[x(t), υ(t)] + m(t) ] z(t) = [ lij ϕ ij = h[x(t)] + s(t) m N(0, M) s N(0, S) x M, S x[k + 1] = f(ˆx[k], υ[k]) + F x (x[k] ˆx[k k]) + F υ υ[k] + F m m[k] z[k + 1] = h(ˆx[k]) + H x (ˆx[k + 1 k] x[k]) + H s s[k] F x, F υ, F m, H x, H s f h x[k + 1] z[k + 1] x[k + 1 k] = x[k] ˆx[k + 1 k] = F x x[k k] + F υ υ[k] + F m m[k] z[k + 1 k] = z[k + 1] h[k + 1 k] = H x x + H s s[k] ˆx[k] x[k + 1] ˆx[k + 1 k] = f(ˆx[k], υ[k])
23 ˆP [k + 1 k] = F x ˆP [k k]f x + F m ˆM[k]F m [k + 1] = z[k + 1] h(ˆx[k + 1 k]) ˆx[k + 1 k] K[k + 1] = ˆP [k + 1 k]h x (H x ˆP [k + 1 k]h x + H s ŜH S ) 1 ˆx[k + 1 k + 1] = ˆx[k + 1 k] + K[k + 1][k + 1] ˆP [k + 1 k + 1] = ˆP [k + 1 k] K[k + 1]H x ˆP [k + 1 k] M S f, h R j R i
24 rc max 2a c u l < 0 l ψ l = (x l x f ) 2 + (y l y f ) 2 ψ = π arctan2(y f y l, x l x f ) θ l
25 x l, y l x f, y f θ l l = 1 2l [2(x l x f )(ẋ l x f ) + 2(y l y f )(ẏ l y f )] = 1 l [(x l x f )(u l cosθ l u f cosθ f ) + (y l y f )(u l sinθ l u f sinθ f )] = u f [ x f x l l cosθ f + y f yl sinθ f ] + u l [ x l x f l l cosθ l + y l yf sinθ l ] l l (x l x f ) (y l y f ) x l x f l y l y f l = cos(θ l + ψ) = sin(θ l + ψ) l = u f (cos(θ l + ψ)cosθ f + sin(θ l + ψ)sinθ f ) u l (cos(θ l + ψ)cosθ l + sin(θ l + ψ)sinθ l ) = u f cos(θ l + ψ θ f ) u l cos(θ l + ψ θ l ) = u f cos(ψ + θ l θ f ) u l cosψ
26 ψ = θ d dt arctan2(y f y l, x l x f ) 1 ( y f ẏ l )(x l x f ) (y f y l )(ẋ l x f ) = ω l 1 + ( y f y l x l x f ) 2 (x l x f ) 2 = ω l 1 l 2 [u f(cosθ f (y f y l ) + sinθ f (x l x f )) + u l (sinθ l (x f x l ) + cosθ l (y l y f ))] = ω l 1 l [u f(cosθ f sin(θ l + ψ) sinθ f cos(θ l + ψ)) + u l (sinθ l cos(θ l + ψ) cosθ l sin(θ l + ψ) = ω l u f sin(ψ + θ l θ f ) l + u l sinψ l l ψ β = cosγ 0 γ l [ uf ω f ] + cosψ 0 ψ l [ ul ω l ] ż = Aυ f + Bυ l υ l = [ u l ω l ] υ f = [ u f ω f ] z = [ l ψ β ] R 3 β = θ l θ f γ = β + ψ
27 ż = Aυ f + Bυ l y = Cz [ ] C = y y d z y υ f [ ] z = l ψ R 2 z = Ãυ f + Bυ l β = ω l ω f y = z ẏ = Ãυ f + Bυ l. υ f = Ã 1 (R Bυ l ) R
28 y R ẏ = R ω f z x r A Ã = [ cosγ d γ γ l d γ l ( sina c a = arctan cosa c r max = d 2 + r max c ] d r max c ) 2 2dr max cosa c c
29 R R = ke z = [ k1 e l k 2 e ψ k 1 k 2 e z = ] [ e l e ψ ] = [ l d l ψ d ψ z z d = [ l d ψ d ] ] z = k( z d z), β = ω l ω f y = z υ f υ f = [ uf ω f ] = [ ul β + k 1 e l γ (k 2 e ψ + ω l )l γ u l β + k 1e l γ + (k d d 2e ψ + ω l ) l γ d ] z = z d e l e ψ ė l = k 1 (l d l) = k 1 e l e ψ = k 2 (ψ d ψ) = k 2 e ψ V 1 (e z ) = 1 2 (e2 l + e 2 ψ) > 0, e z 0 V 1 (0) = 0
30 V 1 (e z ) = e l ė l + e ψ e ψ = k 1 e 2 l k 2 e 2 ψ < 0, e z 0 V 1 (0) = 0 a 1 e z λ V 1 (e z ) a 2 e z λ V 1 (e z ) a 3 e z λ a 1 = a 2 = 1, a 2 3 = k 1 + k 2, λ = 2 β = ω l ω f y = k( z d z) l ψ β β C = {l ψ β} R 3 K
31 C = {l ψ} R 2 K = { z C l < r max, ψ < a} z z d z(t = 0), z d K z K t 0 l r max ϕ a ϕ = β +ψ +π M C R 3 M = {z C h i (z) 0, i = 1, 2} h 1 = l r max h 2 = ϕ a h 1 0 h 2 0 β
32 u f u l θ f θ l + π e β = β + π e β = ω l ω f = u l d sine β + δ(e β, e tildez, ω l ) δ = ω l [1 + l d cos(e β + ψ)] + 1 d [k 1e l sin(e β + ψ) + k 2 e ψ lcos(e β + ψ)] l ψ e z = 0 e β (e z = 0) = u l d sine β + δ(e β, 0, ω l ) ṅ = A 0 n A 0 H(s) e β = ω l + 1 d [u lsine β + ω l l d cos(e β + ψ d )] = ω l + u l ω l l d sinψ d sine β + ω ll d cosψ d cose β d d = ω l + ρ 1 cos(e β ρ 2 ) (ul ) 2 ( ) 2 ( ) ω l l d sinψ d ωl l d cosψ d ul ω l l d sinψ d ρ 1 = +, ρ 2 = arctan. d d ω l l d cosψ d e eq β = ρ 2 +arccos( ω l ρ 1 )
33 e eq β e β = f(e β ) e β = f(e eq β ) + f e β (e eq β )(e β e eq β ) = ρ 1sin e β = ρ 1 1 ( ωl ρ 1 ( ( arccos ω )) l e β ρ 1 2 ) e β V 2 ( e β ) = e β > 0 e β 0 V 2 (0) = 0 V 2 ( e β ) = ρ 1 1 ( ωl ρ 1 V 2 (0) = 0 2 ) 2 e β < 0 e β 0 ρ 1 > 0 e eq β u l = U ω l = 0 e β = U l sine β e eq β = 0 β π ϕ = ψ + β + π ψ d z d K ψ d < a ϕ < a h 2 < 0 ρ 1 0 u l < 0
34 t > 0 u l = U ω l = Ω ϕ ϕ eq = e eq β ) + ψeq = ρ 2 + arccos ( Ωρ1 + ψ d h 2 < 0 ϕ eq < a ψ d ψ d = 0 ψ d = π 6 ψ d = π 6 l d = 3 l d l d = 3 l d = 1 l d = 6 ψ d = 0 ϕ ϕ ω l κ = ω l u l u l ( 1 ϕ eq κ = arctan l ) dsinψ d d + arccos l d cosψ d ( 1 l ) + ψ d 2 κ dsinψ d + (ld cosψ d ) 2 κ
35 ψ d ϕ eq 0 = ψ d l d h 2 < 0 δ(e β, e z, ω l ) δ(e β, e z, ω l ) = 0 e β = f(t, e β ) = u l d sine β V 3 (e β ) = 1 2 e2 β > 0 0, V 3 (0) = 0 V 3 (e β ) = e β e β = u l d e βsine β e β u l < 0 e β 0 e β = 0 e β sine β > 0 e β < π V 3 (t, e β ) : [0, ] D R D = {e β R e β < r}
36 [0, ] D c 1 e 2 β V 3 (t, e β ) c 2 e 2 β V t + V f(t, e β ) c 3 e 2 β e β V e β c 4 e β c 1 = c 2 = 1 2, c 4 = 1 c 3 = u l d r2 3! + r4 5! c 3 D r c 3 u l d e β = 0 D ω l δ(t, e β, e z, ω l ) ϵ < c 3 c1 θr u l θr c 4 c 2 d t > 0 θ < 1 e β (t 0 ) < c1 c 2 r = r e β (t) k ( ζ(t t 0 )) e β (t 0 ) t 0 t < t 1 e β (t) b t t 1 t 1 k = c2 c 1 = 1 ζ = (1 θ)c 3 (1 θ) u l 2c 2 2d b = c 4 c2 ϵ c 3 c 1 θ d ϵ u l θ V (t, ) [0, ] D D = { R 3 e < c} c > 0 V (t, ) 0
37 h 1 h 2 M z(t) M M ż T z C T z C C z M z(t) M h i, i 1, 2 M dh i dt = h iż < 0 {z C h i (z) = 0} h i J h (z) h = (h 1, h 2 ) : R 3 R 2 J h (z)ż < 0, J h (z) = [ h1 l h 2 l h 1 ψ h 2 ψ h 1 β h 2 β ] M l = r max ϕ = ±a t = 0
38 l = r max h 1 = 0 ϕ = a h 2 = 0 h 2 ḣ 2 ϕ=a,l=rmax < 0 d(ψ + e β a) ϕ=a,l=rmax < 0 dt k 1 (l d r max )sina d + (k 2 e ψ + ω l )(1 + r max d cosa) + u l d sine β < 0 l d < r max a (0, π) k 1 > (k 2e ψ + ω l )(d + r max cosa) + u l sin(a ψ) (r max l d )sina h 1 < 0 l l d ḣ1 < 0 l = r max, ϕ = a ḣ 2 ϕ= a,l=rmax < 0 d( ψ e β a) ϕ= a,l=rmax < 0 dt k 1 > (k 2e ψ + ω l )(d + r max cosa) u l sin(a + ψ) (l d r max )sina M z(t = 0) M κ ψ d κ < 0 ω l > 0 κ > 0 ω l < 0 ϕ
39 κ = 0 κ = 0.3 κ = 0.6 ψ d = a 3 κ = 0 κ = 0.3 κ = 0.6 ψ d = a 3 κ = 0 κ = 0.3 κ = 0.6 ψ d = a 3 κ = 0 κ = 0.3 κ = 0.6 ψ d = a 3 k 1 ψ [ a, a] d = 0.5, a = π 4, r max = 5, l d = 2 k 2 = 0.4
40 d = 0.5 r max = 6 2a a = π 3 L F 1, F 2 l d = 4 ψ d = ± a 3 u l = 2 κ l ϕ κ l ( ϕ a) 0.26 κ l κ l 0.26 F 1 F 2 κ l = 1 κ 10 l = 1 5 κ l = 1 10 κ l = 1 5 L F 1, F 2
41 e l = l d l, e ψ = ψ d ψ ϕ F 1 F 2 ψ F 1 F 2 F 1 F 2 l d, ψ d ϕ L l ψ ϕ
42 F 1 F 2 ϕ
43 O i i = 1,..., n q s = [x s, y s, θ s ] q g = [x g, y g, θ g ] q(τ) τ [0, T ] κ max ω u = ẏ d(atan ẋ) dt ẋ2 + ẏ = 1 2 (1 + ( ) ẏ 2)(ẋ ẋ + ẏ) 1/2 ẋÿ ẍẏ (ẋ 2 + ẏ 2 ) 1 3/2 ρ min d( ẏ ẋ ) dt
44 ρ min = 1 κ max q(τ) I( q( )) = T 0 ẋ2 (τ) + ẏ 2 (τ)dτ q(0) = q s q(t ) = q g A( q(τ)) O i =, τ [0, T ] Λ( q) q = 0, τ [0, T ] ẋÿ ẍẏ (ẋ 2 + ẏ 2 ) 1 3/2 ρ min A(q(t)) t q = f(q, υ) ẋ = ucosθ x(0) = x s x(t ) = x g ẏ = usinθ y(0) = y s y(t ) = y g θ = κu θ(0) = θ s θ(t ) = θ g ṡ = ẋ 2 + ẏ 2 s(0) = 0 υ = (u, ω) U R 2 U = { 1, +1} [ 1 ρ min, 1 ρ min ] I(ω) = T 0 ṡdτ
45 O i K i (q) 0, i = 1,..., m q H(q, s, υ, p, λ, m) = pṡ + λ f(q, υ) + m K(q) m i = 0, K i (q) < 0 0, K i (q) = 0. K i (q) = 0 K i (q) < 0 H(q, s, υ, λ) = pṡ + λ 1 ucosθ + λ 2 usinθ + λ 3 κu λ = (λ, p) λ = Hq (q, υ, λ) λ 1 = 0 λ 2 = 0 λ 3 = λ 1 usinθ λ 2 ucosθ ṗ = 0 δ = λ λ 2 2 α = arctan( λ 2 λ 1 ) H(q, s, υ, λ) = pṡ + δucos(θ α) + λ 3 κu λ 3 = δusin(θ α)
46 υ H(q, s, υ, λ) H(q, s, υ, λ) δucos(θ α) 0 λ 3 κ 0. H = λ κ 3 = 0 λ 3 = 0 θ = α α + π α H κ 0 κ = ± 1 ρ min ρ min ρ min X r d A 1 (q) C = R 2 S 1 S = {(x, y) R 2 x 2 + y 2 = 1} C obs C C obs = {q C A 1 (q) O }
47 q A 1 (q) O = {O 1,..., O n } C free = C \ C obs ( 2 {q C obs = {q C A i (q) O }) C A1 (q) A 2 (q) } i=1 {q C A 1 (q) A 2 (q) } l d d A(q) h = rmax c + d rmax c C obs = {q C A(q) O } = {q C c(x l, y l, h) O } ψ A(q) ψ [ a, a] n ( π, π ) ψ 2 2 C obs C obs R 2 θ l
48 O i A(q) (x l, y l ) C obs q int(o) int(a(q)) = q int(c obs ) int q C obs C obs C free C free C free C obs q(τ) C free q s
49 q g ( υ = [u max, 0] ) ( υ = [u max, ω max ] ) θ s θ s ρ min (x s, y s ) θ s C obs n h n n 1 ω max = u max h < ρ h min ω max = u max ρ min ρ min ρ = max(ρ min, h) ρ min (x s, y s ) θ s (x s, y s ) q g (x g, y g ) θ g (x g, y g )
50 h A(q) ρ min G G i j



51 L F 1, F 2 L l d = 3 L κ l = 1 3 F 1 F 2 L F 1 F 2 L L F 1, F 2 h = r c max+d = 6.5 ρ min = 3 Ω max = V max h = 2 6.5
52 C obs A(q) F 1 F 2 L l d < h L h = l d + d
53 n G(V, A) V = {r 1,..., r n } A = {(i, j) i, j V, i j l ij r max, ϕ ij a} (i, j) A r j r i G r i N i = {j V (i, j) A} R i V, i = 1,..., m n R 1 = {r 1 } r j R i, i > 1 L k F j r k R i 1 R i
54 R 1 = {r 1 } R 2 = {r 2, r 3 } R 3 = {r 4, r 5, r 6 } R 4 = {r 7, r 8, r 9 } [ π, π] A(q) ν G h = ν rc max + d, ν h = νr c maxsina + d, ν A(q) e i l = l d i l i, e i ψ = ψd i ψ i e i β = β i+π V i = 1 2 ( (e i l ) 2 + (e i ψ) 2 + (e i β) 2)
55 L k F i u k < 0 ω k < Ω max k V = n i=2 V i n u j < 0 ω j < Ω max j j V \ R m u k > 0 R 2 r 1 R 1 d l ψ R j j {1,..., m 2 < m n} ( i = 0 (ω 1 = 0) i [2, n]) r 1 ω 1 = ±Ω max 1 r i R 2
56 L 1 F 2 L 2 F 3 β i r 1 r j R 3 L k F j r k R 2 c j = l j 2(1 cosbk ) b k = e k β eq r j R 4 L k F j, r k R 3 c j = l 2 j + α2 2l j αcosδ α = c 2 k + l2 j 2c kl j cos(ψ j ϕ eq k + ζ) ζ = arccos c k 2l k δ = ζ + ϕ 0 k ψ j λ λ = arccos α2 + c 2 k l2 j 2αc k ϕ 0 k = ψ k ϕ eq k
57 r 3 R 3 r 4 R 4 s ij r i r j L lead(i) F i L lead(j) F j s ij > c i + c j + 2d c c i = l 2 i + α2 i 2l iα i cosδ i, r i R j, j [3, m] c i = 0, r i R 1 R 2
58 α i = c 2 lead(i) + l2 i 2c lead(i)l i cos(ψ i ϕ eq lead(i) + ζ i) ζ i = arccos c lead(i) 2l lead(i) λ i = arccos α2 i + c 2 lead(i) l2 i 2α i c lead(i) δ i = ζ i + ψ lead(i) ψ i λ i, r i R j, j [4, m] δ i = e lead(i) β eq, r i R 3 u j, ω j r j L i F j u j = u i cosβ j ω i l d j sinγ j = u i (cosβ j κ i l d j sinγ j ) ω j = u i d sinβ j + ω i l d j d cosγ j = u i d (sinβ j + κ i l d j cosγ j ) κ i = ω i u i r i r j R 2 r i υ = [Vi max, 0] υ =, V max ] ω j u j [V max i i κ max i r i V max j ( ) = Vi max κ max i lj d sin(e j β eq + π + ψj d ) cos(e j β eq + π) Ω max j = V id max κmax i lj d cos(π + ψj d ) ( V i max κ max i e j β eq = ρ j 2 + arccos ρ j 1 r k r j ) V max k = V max j cos(e k β eq + π) ω j ( β k =e k βeq +π ) l d ksin(e k β eq + π + ψ d k) Ω max k = Ω max j l d k d cos(π + ψd k)
59 (ω u) = ± 1 (u ± u L max) { u max, u max } { ω max, ω max } R m ϕ i a i V \ r 1 r 1 m d = 0.5 r max = 6 2a a = π 3 R 1 = {r 1 } R 2 = {r 2, r 3 } R 3 = {r 4, r 5 } R 2 R 3 l d = [4, 2] ψ d = ±[ π 5, π 6 ] r 1 u 1 = 1 κ l = 0.1 ρ min = 10 h = 2r max sina = 10.4


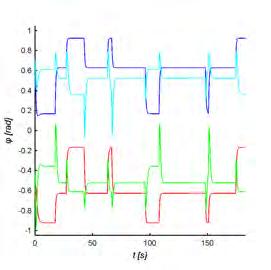
60 r 1 r 2 r 3 r 4 r 5 e l = l d l, e ψ = ψ d ψ ϕ
61 n n G(V, A) G
62 n
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
Π Ο Λ Ι Τ Ι Κ Α Κ Α Ι Σ Τ Ρ Α Τ Ι Ω Τ Ι Κ Α Γ Ε Γ Ο Ν Ο Τ Α
 Α Ρ Χ Α Ι Α Ι Σ Τ Ο Ρ Ι Α Π Ο Λ Ι Τ Ι Κ Α Κ Α Ι Σ Τ Ρ Α Τ Ι Ω Τ Ι Κ Α Γ Ε Γ Ο Ν Ο Τ Α Σ η µ ε ί ω σ η : σ υ ν ά δ ε λ φ ο ι, ν α µ ο υ σ υ γ χ ω ρ ή σ ε τ ε τ ο γ ρ ή γ ο ρ ο κ α ι α τ η µ έ λ η τ ο ύ
Α Ρ Χ Α Ι Α Ι Σ Τ Ο Ρ Ι Α Π Ο Λ Ι Τ Ι Κ Α Κ Α Ι Σ Τ Ρ Α Τ Ι Ω Τ Ι Κ Α Γ Ε Γ Ο Ν Ο Τ Α Σ η µ ε ί ω σ η : σ υ ν ά δ ε λ φ ο ι, ν α µ ο υ σ υ γ χ ω ρ ή σ ε τ ε τ ο γ ρ ή γ ο ρ ο κ α ι α τ η µ έ λ η τ ο ύ
 l 1 p r i = ρ ij α j + w i j=1 ρ ij λ α j j p w i p α j = 1, α j 0, j = 1,..., p j=1 R B B B m j [ρ 1j, ρ 2j,..., ρ Bj ] T = }{{} α + [,,..., ] R B p p α [α 1,..., α p ] [w 1,..., w p ] M m 1 m 2,
l 1 p r i = ρ ij α j + w i j=1 ρ ij λ α j j p w i p α j = 1, α j 0, j = 1,..., p j=1 R B B B m j [ρ 1j, ρ 2j,..., ρ Bj ] T = }{{} α + [,,..., ] R B p p α [α 1,..., α p ] [w 1,..., w p ] M m 1 m 2,
m i N 1 F i = j i F ij + F x
 N m i i = 1,..., N m i Fi x N 1 F ij, j = 1, 2,... i 1, i + 1,..., N m i F i = j i F ij + F x i mi Fi j Fj i mj O P i = F i = j i F ij + F x i, i = 1,..., N P = i F i = N F ij + i j i N i F x i, i = 1,...,
N m i i = 1,..., N m i Fi x N 1 F ij, j = 1, 2,... i 1, i + 1,..., N m i F i = j i F ij + F x i mi Fi j Fj i mj O P i = F i = j i F ij + F x i, i = 1,..., N P = i F i = N F ij + i j i N i F x i, i = 1,...,
F (x) = kx. F (x )dx. F = kx. U(x) = U(0) kx2
 = kx. F (x )dx. F = kx. U(x) = U(0) kx2") F (x) = kx x k F = F (x) U(0) U(x) = x F = kx 0 F (x )dx U(x) = U(0) + 1 2 kx2 x U(0) = 0 U(x) = 1 2 kx2 U(x) x 0 = 0 x 1 U(x) U(0) + U (0) x + 1 2 U (0) x 2 U (0) = 0 U(x) U(0) + 1 2 U (0) x 2 U(0) =
F (x) = kx x k F = F (x) U(0) U(x) = x F = kx 0 F (x )dx U(x) = U(0) + 1 2 kx2 x U(0) = 0 U(x) = 1 2 kx2 U(x) x 0 = 0 x 1 U(x) U(0) + U (0) x + 1 2 U (0) x 2 U (0) = 0 U(x) U(0) + 1 2 U (0) x 2 U(0) =
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ. Ενότητα 5 η : Παραδείγµατα 3 µηχανισµών. χώρο (3 )
") ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕ ΙΑΣΜΟ ΜΗΧΑΝΩΝ Ενότητα 5 η Παραδείγµατα µηχανισµών στο χώρο (3 ) Παράδειγµα 1 ο : Ροµποτικός βραχίονας RPPRR R: revolute pair P: prismatic pair Βραχίονας Τηλεσκοπικός βραχίονας
 ! " # $ % & $ % & $ & # " ' $ ( $ ) * ) * +, -. / # $ $ ( $ " $ $ $ % $ $ ' ƒ " " ' %. " 0 1 2 3 4 5 6 7 8 9 : ; ; < = : ; > : 0? @ 8? 4 A 1 4 B 3 C 8? D C B? E F 4 5 8 3 G @ H I@ A 1 4 D G 8 5 1 @ J C
! " # $ % & $ % & $ & # " ' $ ( $ ) * ) * +, -. / # $ $ ( $ " $ $ $ % $ $ ' ƒ " " ' %. " 0 1 2 3 4 5 6 7 8 9 : ; ; < = : ; > : 0? @ 8? 4 A 1 4 B 3 C 8? D C B? E F 4 5 8 3 G @ H I@ A 1 4 D G 8 5 1 @ J C
Α Ρ Ι Θ Μ Ο Σ : 6.913
 Α Ρ Ι Θ Μ Ο Σ : 6.913 ΠΡΑΞΗ ΚΑΤΑΘΕΣΗΣ ΟΡΩΝ ΔΙΑΓΩΝΙΣΜΟΥ Σ τ η ν Π ά τ ρ α σ ή μ ε ρ α σ τ ι ς δ ε κ α τ έ σ σ ε ρ ι ς ( 1 4 ) τ ο υ μ ή ν α Ο κ τ ω β ρ ί ο υ, η μ έ ρ α Τ ε τ ά ρ τ η, τ ο υ έ τ ο υ ς δ
Α Ρ Ι Θ Μ Ο Σ : 6.913 ΠΡΑΞΗ ΚΑΤΑΘΕΣΗΣ ΟΡΩΝ ΔΙΑΓΩΝΙΣΜΟΥ Σ τ η ν Π ά τ ρ α σ ή μ ε ρ α σ τ ι ς δ ε κ α τ έ σ σ ε ρ ι ς ( 1 4 ) τ ο υ μ ή ν α Ο κ τ ω β ρ ί ο υ, η μ έ ρ α Τ ε τ ά ρ τ η, τ ο υ έ τ ο υ ς δ
 χ (1) χ (3) χ (1) χ (3) L x, L y, L z ( ) ħ2 2 2m x + 2 2 y + 2 ψ (x, y, z) = E 2 z 2 x,y,z ψ (x, y, z) E x,y,z E x E y E z ħ2 2m 2 x 2ψ (x) = E xψ (x) ħ2 2m 2 y 2ψ (y) = E yψ (y) ħ2 2m 2 z 2ψ (z)
χ (1) χ (3) χ (1) χ (3) L x, L y, L z ( ) ħ2 2 2m x + 2 2 y + 2 ψ (x, y, z) = E 2 z 2 x,y,z ψ (x, y, z) E x,y,z E x E y E z ħ2 2m 2 x 2ψ (x) = E xψ (x) ħ2 2m 2 y 2ψ (y) = E yψ (y) ħ2 2m 2 z 2ψ (z)
2. Α ν ά λ υ σ η Π ε ρ ι ο χ ή ς. 3. Α π α ι τ ή σ ε ι ς Ε ρ γ ο δ ό τ η. 4. Τ υ π ο λ ο γ ί α κ τ ι ρ ί ω ν. 5. Π ρ ό τ α σ η. 6.
 Π Ε Ρ Ι Ε Χ Ο Μ Ε Ν Α 1. Ε ι σ α γ ω γ ή 2. Α ν ά λ υ σ η Π ε ρ ι ο χ ή ς 3. Α π α ι τ ή σ ε ι ς Ε ρ γ ο δ ό τ η 4. Τ υ π ο λ ο γ ί α κ τ ι ρ ί ω ν 5. Π ρ ό τ α σ η 6. Τ ο γ ρ α φ ε ί ο 1. Ε ι σ α γ ω
Π Ε Ρ Ι Ε Χ Ο Μ Ε Ν Α 1. Ε ι σ α γ ω γ ή 2. Α ν ά λ υ σ η Π ε ρ ι ο χ ή ς 3. Α π α ι τ ή σ ε ι ς Ε ρ γ ο δ ό τ η 4. Τ υ π ο λ ο γ ί α κ τ ι ρ ί ω ν 5. Π ρ ό τ α σ η 6. Τ ο γ ρ α φ ε ί ο 1. Ε ι σ α γ ω
.. ntsets ofa.. d ffeom.. orp ism.. na s.. m ooth.. man iod period I n open square. n t s e t s ofa \quad d ffeom \quad orp ism \quad na s \quad m o
 G G - - -- - W - - - R S - q k RS ˆ W q q k M G W R S L [ RS - q k M S 4 R q k S [ RS [ M L ˆ L [M O S 4] L ˆ ˆ L ˆ [ M ˆ S 4 ] ˆ - O - ˆ q k ˆ RS q k q k M - j [ RS ] [ M - j - L ˆ ˆ ˆ O ˆ [ RS ] [ M
G G - - -- - W - - - R S - q k RS ˆ W q q k M G W R S L [ RS - q k M S 4 R q k S [ RS [ M L ˆ L [M O S 4] L ˆ ˆ L ˆ [ M ˆ S 4 ] ˆ - O - ˆ q k ˆ RS q k q k M - j [ RS ] [ M - j - L ˆ ˆ ˆ O ˆ [ RS ] [ M
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Πτυχιακή εξέταση στη Μηχανική ΙI 20 Σεπτεμβρίου 2007
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Πτυχιακή εξέταση στη Μηχανική ΙI 0 Σεπτεμβρίου 007 Τμήμα Π. Ιωάννου & Θ. Αποστολάτου Απαντήστε στα ερωτήματα που ακολουθούν με σαφήνεια, ακρίβεια και απλότητα. Όλα τα
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Πτυχιακή εξέταση στη Μηχανική ΙI 0 Σεπτεμβρίου 007 Τμήμα Π. Ιωάννου & Θ. Αποστολάτου Απαντήστε στα ερωτήματα που ακολουθούν με σαφήνεια, ακρίβεια και απλότητα. Όλα τα
!!" #7 $39 %" (07) ..,..,.. $ 39. ) :. :, «(», «%», «%», «%» «%». & ,. ). & :..,. '.. ( () #*. );..,..'. + (# ).
 ..,..,.. $ 39. ) :. :, «(», «%», «%», «%» «%». & ,. ). & :..,. '.. ( () #*. );..,..'. + (# ).") 1 00 3 !!" 344#7 $39 %" 6181001 63(07) & : ' ( () #* ); ' + (# ) $ 39 ) : : 00 %" 6181001 63(07)!!" 344#7 «(» «%» «%» «%» «%» & ) 4 )&-%/0 +- «)» * «1» «1» «)» ) «(» «%» «%» + ) 30 «%» «%» )1+ / + : +3
1 00 3 !!" 344#7 $39 %" 6181001 63(07) & : ' ( () #* ); ' + (# ) $ 39 ) : : 00 %" 6181001 63(07)!!" 344#7 «(» «%» «%» «%» «%» & ) 4 )&-%/0 +- «)» * «1» «1» «)» ) «(» «%» «%» + ) 30 «%» «%» )1+ / + : +3
1.1.1 Εσωτερικό και Εξωτερικό Γινόμενο Διανυσμάτων
 3 1.1 Διανύσματα 1.1.1 Εσωτερικό και Εξωτερικό Γινόμενο Διανυσμάτων ΑΣΚΗΣΗ 1.1 Να βρεθεί η γωνία που σχηματίζουν τα διανύσματα î + ĵ + ˆk και î + ĵ ˆk. z k i j y x Τα δύο διανύσματα που προκύπτουν από
3 1.1 Διανύσματα 1.1.1 Εσωτερικό και Εξωτερικό Γινόμενο Διανυσμάτων ΑΣΚΗΣΗ 1.1 Να βρεθεί η γωνία που σχηματίζουν τα διανύσματα î + ĵ + ˆk και î + ĵ ˆk. z k i j y x Τα δύο διανύσματα που προκύπτουν από
Gapso t e q u t e n t a g ebra P open parenthesis N closing parenthesis fin i s a.. pheno mno nd iscovere \ centerline
 G q v v G q v H 4 q 4 q v v ˆ ˆ H 4 ] 4 ˆ ] W q K j q G q K v v W v v H 4 z ] q 4 K ˆ 8 q ˆ j ˆ O C W K j ˆ [ K v ˆ [ [; 8 ] q ˆ K O C v ˆ ˆ z q [ R ; ˆ 8 ] R [ q v O C ˆ ˆ v - - ˆ - ˆ - v - q - - v -
G q v v G q v H 4 q 4 q v v ˆ ˆ H 4 ] 4 ˆ ] W q K j q G q K v v W v v H 4 z ] q 4 K ˆ 8 q ˆ j ˆ O C W K j ˆ [ K v ˆ [ [; 8 ] q ˆ K O C v ˆ ˆ z q [ R ; ˆ 8 ] R [ q v O C ˆ ˆ v - - ˆ - ˆ - v - q - - v -
1 + t + s t. 1 + t + s
 Κεφάλαιο 1 Μετρικοί χώροι Ομάδα Α 1.1. Εστω (X, ) χώρος με νόρμα. Δείξτε ότι η νόρμα είναι άρτια συνάρτηση και ικανοποιεί την ανισότητα x y x y για κάθε x, y X. Υπόδειξη. Για κάθε x X έχουμε x = ( 1)x
Κεφάλαιο 1 Μετρικοί χώροι Ομάδα Α 1.1. Εστω (X, ) χώρος με νόρμα. Δείξτε ότι η νόρμα είναι άρτια συνάρτηση και ικανοποιεί την ανισότητα x y x y για κάθε x, y X. Υπόδειξη. Για κάθε x X έχουμε x = ( 1)x
Q π (/) ^ ^ ^ Η φ. <f) c>o. ^ ο. ö ê ω Q. Ο. o 'c. _o _) o U 03. ,,, ω ^ ^ -g'^ ο 0) f ο. Ε. ιη ο Φ. ο 0) κ. ο 03.,Ο. g 2< οο"" ο φ.
 ^ ^ ^ Η φ. <f) c>o. ^ ο. ö ê ω Q. Ο. o 'c. _o _) o U 03. ,,, ω ^ ^ -g'^ ο 0) f ο. Ε. ιη ο Φ. ο 0) κ. ο 03.,Ο. g 2< οο ο φ.") II 4»» «i p û»7'' s V -Ζ G -7 y 1 X s? ' (/) Ζ L. - =! i- Ζ ) Η f) " i L. Û - 1 1 Ι û ( - " - ' t - ' t/î " ι-8. Ι -. : wî ' j 1 Τ J en " il-' - - ö ê., t= ' -; '9 ',,, ) Τ '.,/,. - ϊζ L - (- - s.1 ai
II 4»» «i p û»7'' s V -Ζ G -7 y 1 X s? ' (/) Ζ L. - =! i- Ζ ) Η f) " i L. Û - 1 1 Ι û ( - " - ' t - ' t/î " ι-8. Ι -. : wî ' j 1 Τ J en " il-' - - ö ê., t= ' -; '9 ',,, ) Τ '.,/,. - ϊζ L - (- - s.1 ai
 k k ΚΕΦΑΛΑΙΟ 1 G = (V, E) V E V V V G E G e = {v, u} E v u e v u G G V (G) E(G) n(g) = V (G) m(g) = E(G) G S V (G) S G N G (S) = {u V (G)\S v S : {v, u} E(G)} G v S v V (G) N G (v) = N G ({v}) x V (G)
k k ΚΕΦΑΛΑΙΟ 1 G = (V, E) V E V V V G E G e = {v, u} E v u e v u G G V (G) E(G) n(g) = V (G) m(g) = E(G) G S V (G) S G N G (S) = {u V (G)\S v S : {v, u} E(G)} G v S v V (G) N G (v) = N G ({v}) x V (G)
Ó³ Ÿ , º 1(130).. 7Ä ±μ. Ñ Ò É ÉÊÉ Ö ÒÌ ² μ, Ê
.. 7Ä ±μ. Ñ Ò É ÉÊÉ Ö ÒÌ ² μ, Ê") Ó³ Ÿ. 006.. 3, º 1(130).. 7Ä16 Š 530.145 ˆ ƒ ˆ ˆŒ ˆŸ Š ƒ.. ±μ Ñ Ò É ÉÊÉ Ö ÒÌ ² μ, Ê É μ ² Ö Ó μ μ Ö μ μ²õ μ É μ ÌÉ ±ÊÎ É ² ³ É μ - Î ±μ μ ÊÌ ±μ Ëμ ³ μ- ±² μ ÒÌ ³μ ²ÖÌ Ê ±. ³ É ÔÉμ μ μ μ Ö, Ö ²ÖÖ Ó ±μ³
Ó³ Ÿ. 006.. 3, º 1(130).. 7Ä16 Š 530.145 ˆ ƒ ˆ ˆŒ ˆŸ Š ƒ.. ±μ Ñ Ò É ÉÊÉ Ö ÒÌ ² μ, Ê É μ ² Ö Ó μ μ Ö μ μ²õ μ É μ ÌÉ ±ÊÎ É ² ³ É μ - Î ±μ μ ÊÌ ±μ Ëμ ³ μ- ±² μ ÒÌ ³μ ²ÖÌ Ê ±. ³ É ÔÉμ μ μ μ Ö, Ö ²ÖÖ Ó ±μ³
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΕΠΙΧΕΙΡΗΣΙΑΚΗΣ ΕΡΕΥΝΑΣ
 ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΕΠΙΧΕΙΡΗΣΙΑΚΗΣ ΕΡΕΥΝΑΣ ΑΕΡΟΔΥΝΑΜΙΚΗ Διδάσκων: Δρ. Ριζιώτης Βασίλης Μόνιμη ΆκυκληΡοή Άδεια Χρήσης Το παρόν εκπαιδευτικό
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ ΤΟΜΕΑΣ ΒΙΟΜΗΧΑΝΙΚΗΣ ΔΙΟΙΚΗΣΗΣ ΚΑΙ ΕΠΙΧΕΙΡΗΣΙΑΚΗΣ ΕΡΕΥΝΑΣ ΑΕΡΟΔΥΝΑΜΙΚΗ Διδάσκων: Δρ. Ριζιώτης Βασίλης Μόνιμη ΆκυκληΡοή Άδεια Χρήσης Το παρόν εκπαιδευτικό
ΗλιακήΓεωµετρία. Γιάννης Κατσίγιαννης
 ΗλιακήΓεωµετρία Γιάννης Κατσίγιαννης ΗηλιακήενέργειαστηΓη Φασµατικήκατανοµήτηςηλιακής ακτινοβολίας ΗκίνησητηςΓηςγύρωαπότονήλιο ΗκίνησητηςΓηςγύρωαπότονήλιοµπορεί να αναλυθεί σε δύο κύριες συνιστώσες: Περιφορά
ΗλιακήΓεωµετρία Γιάννης Κατσίγιαννης ΗηλιακήενέργειαστηΓη Φασµατικήκατανοµήτηςηλιακής ακτινοβολίας ΗκίνησητηςΓηςγύρωαπότονήλιο ΗκίνησητηςΓηςγύρωαπότονήλιοµπορεί να αναλυθεί σε δύο κύριες συνιστώσες: Περιφορά
Z L L L N b d g 5 * " # $ % $ ' $ % % % ) * + *, - %. / / + 3 / / / / + * 4 / / 1 " 5 % / 6, 7 # * $ 8 2. / / % 1 9 ; < ; = ; ; >? 8 3 " #
 * + *, - %. / / + 3 / / / / + * 4 / / 1 5 % / 6, 7 # * $ 8 2. / / % 1 9 ; < ; = ; ; >? 8 3 #") Z L L L N b d g 5 * " # $ % $ ' $ % % % ) * + *, - %. / 0 1 2 / + 3 / / 1 2 3 / / + * 4 / / 1 " 5 % / 6, 7 # * $ 8 2. / / % 1 9 ; < ; = ; ; >? 8 3 " # $ % $ ' $ % ) * % @ + * 1 A B C D E D F 9 O O D H
Z L L L N b d g 5 * " # $ % $ ' $ % % % ) * + *, - %. / 0 1 2 / + 3 / / 1 2 3 / / + * 4 / / 1 " 5 % / 6, 7 # * $ 8 2. / / % 1 9 ; < ; = ; ; >? 8 3 " # $ % $ ' $ % ) * % @ + * 1 A B C D E D F 9 O O D H
2?nom. Bacc. 2 nom. acc. S <u. >nom. 7acc. acc >nom < <
 K+P K+P PK+ K+P - _+ l Š N K - - a\ Q4 Q + hz - I 4 - _+.P k - G H... /.4 h i j j - 4 _Q &\\ \\ ` J K aa\ `- c -+ _Q K J K -. P.. F H H - H - _+ 4 K4 \\ F &&. P H.4 Q+ 4 G H J + I K/4 &&& && F : ( -+..
K+P K+P PK+ K+P - _+ l Š N K - - a\ Q4 Q + hz - I 4 - _+.P k - G H... /.4 h i j j - 4 _Q &\\ \\ ` J K aa\ `- c -+ _Q K J K -. P.. F H H - H - _+ 4 K4 \\ F &&. P H.4 Q+ 4 G H J + I K/4 &&& && F : ( -+..
 V r,k j F k m N k+1 N k N k+1 H j n = 7 n = 16 Ṽ r ñ,ñ j Ṽ Ṽ j x / Ṽ W 2r V r D N T T 2r 2r N k F k N 2r Ω R 2 n Ω I n = { N: n} n N R 2 x R 2, I n Ω R 2 u R 2, I n x k+1 = x k + u k, u, x R 2,
V r,k j F k m N k+1 N k N k+1 H j n = 7 n = 16 Ṽ r ñ,ñ j Ṽ Ṽ j x / Ṽ W 2r V r D N T T 2r 2r N k F k N 2r Ω R 2 n Ω I n = { N: n} n N R 2 x R 2, I n Ω R 2 u R 2, I n x k+1 = x k + u k, u, x R 2,
Γενικά Μαθηματικά ΙΙ
 ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3 η : Εισαγωγικές Ένvοιες ΙI Λουκάς Βλάχος Καθηγητής Αστροφυσικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ ΑΝΟΙΚΤΑ ΑΚΑΔΗΜΑΙΚΑ ΜΑΘΗΜΑΤΑ Ενότητα 3 η : Εισαγωγικές Ένvοιες ΙI Λουκάς Βλάχος Καθηγητής Αστροφυσικής Άδειες Χρήσης Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες
(product-operator) I I cos ω ( t sin ω ( t x x ) + Iy )
 I I cos ω ( t sin ω ( t x x ) + Iy )") (product-operator) I I cos( t) + I sin( t) x x y z 2π (rad) y 1 y t x = 2πν x t (rad) sin t Iy# cos t t Ix# Ix# (t ) z Ix# Iy# Ix# (t ) z Ix cos (t ) + Iy sin (t ) -x -y t y I-y# I-y# (t ) z (t ) z x I-y#
(product-operator) I I cos( t) + I sin( t) x x y z 2π (rad) y 1 y t x = 2πν x t (rad) sin t Iy# cos t t Ix# Ix# (t ) z Ix# Iy# Ix# (t ) z Ix cos (t ) + Iy sin (t ) -x -y t y I-y# I-y# (t ) z (t ) z x I-y#
( )U 1 ( θ )U 3 ( ) = U 3. ( ) όπου U j περιγράφει περιστροφή ως προς! e j. Γωνίες Euler. ω i. ω = ϕ ( ) = ei = U ij ej j
U 1 ( θ )U 3 ( ) = U 3. ( ) όπου U j περιγράφει περιστροφή ως προς! e j. Γωνίες Euler. ω i. ω = ϕ ( ) = ei = U ij ej j") Γωνίες Euler ΦΥΣ 11 - Διαλ.3 1 q Όλοι σχεδόν οι υπολογισµοί που έχουµε κάνει για την κίνηση ενός στερεού στο σύστηµα συντεταγµένων του στερεού σώµατος Ø Για παράδειγµα η γωνιακή ταχύτητα είναι: ω = i ω
Γωνίες Euler ΦΥΣ 11 - Διαλ.3 1 q Όλοι σχεδόν οι υπολογισµοί που έχουµε κάνει για την κίνηση ενός στερεού στο σύστηµα συντεταγµένων του στερεού σώµατος Ø Για παράδειγµα η γωνιακή ταχύτητα είναι: ω = i ω
ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ- ΤΜΗΜΑ ΦΥΣΙΚΗΣ- ΤΟΜΕΑΣ ΘΕΩΡΗΤΙΚΗΣ ΦΥΣΙΚΗΣ ΜΑΘΗΜΑ: ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ Ι(ΤΜΗΜΑ ΑΡΤΙΩΝ) ΔΙΔΑΣΚΩΝ: Αν. Καθηγητής Ι.
 ΔΙΔΑΣΚΩΝ: Αν. Καθηγητής Ι.") ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ- ΤΜΗΜΑ ΦΥΣΙΚΗΣ- ΤΟΜΕΑΣ ΘΕΩΡΗΤΙΚΗΣ ΦΥΣΙΚΗΣ ΜΑΘΗΜΑ: ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ ΙΤΜΗΜΑ ΑΡΤΙΩΝ) ΔΙΔΑΣΚΩΝ: Αν. Καθηγητής Ι. ΡΙΖΟΣ ΛΥΣΕΙΣ ΘΕΜΑΤΩΝ ΕΞΕΤΑΣΕΩΝ ΠΕΡΙΟΔΟΥ ΦΕΒΡΟΥΑΡΙΟΥ 9 ΘΕΜΑ.4 μονάδες)
ΠΑΝΕΠΙΣΤΗΜΙΟ ΙΩΑΝΝΙΝΩΝ- ΤΜΗΜΑ ΦΥΣΙΚΗΣ- ΤΟΜΕΑΣ ΘΕΩΡΗΤΙΚΗΣ ΦΥΣΙΚΗΣ ΜΑΘΗΜΑ: ΚΛΑΣΙΚΗ ΜΗΧΑΝΙΚΗ ΙΤΜΗΜΑ ΑΡΤΙΩΝ) ΔΙΔΑΣΚΩΝ: Αν. Καθηγητής Ι. ΡΙΖΟΣ ΛΥΣΕΙΣ ΘΕΜΑΤΩΝ ΕΞΕΤΑΣΕΩΝ ΠΕΡΙΟΔΟΥ ΦΕΒΡΟΥΑΡΙΟΥ 9 ΘΕΜΑ.4 μονάδες)
f a o gy s m a l nalg d co h n to h e y o m ia lalg e br coh the oogy lagebr
 - - - * k ˆ v ˆ k ˆ ˆ E x ˆ ˆ [ v ˆ ˆ ˆ ˆ ˆ E x ˆ ˆ ˆ ˆ v ˆ Ex U U ˆ ˆ ˆ ˆ ˆ ˆ v ˆ M v ˆ v M v ˆ ˆ I U ˆ I 9 70 k k ˆ ˆ - I I 9ˆ 70 ˆ [ ˆ - v - - v k k k ˆ - ˆ k ˆ k [ ˆ ˆ D M ˆ k k 0 D M k [ 0 M v M ˆ
- - - * k ˆ v ˆ k ˆ ˆ E x ˆ ˆ [ v ˆ ˆ ˆ ˆ ˆ E x ˆ ˆ ˆ ˆ v ˆ Ex U U ˆ ˆ ˆ ˆ ˆ ˆ v ˆ M v ˆ v M v ˆ ˆ I U ˆ I 9 70 k k ˆ ˆ - I I 9ˆ 70 ˆ [ ˆ - v - - v k k k ˆ - ˆ k ˆ k [ ˆ ˆ D M ˆ k k 0 D M k [ 0 M v M ˆ
ˆ ˆ Œ Ÿ Š Œ ƒˆ Šˆ ˆ Ÿ ˆ ˆ Š ˆˆ ƒ ˆ ˆˆ
 Ó³ Ÿ. 2015.. 12, º 2(193).. 281Ä298 ˆ ˆŠ Œ ˆ ˆ Œ ƒ Ÿ. ˆŸ ˆ ˆ Œ Ÿ Š Œ ƒˆ Šˆ ˆ Ÿ ˆ ˆ Š ˆˆ ƒ ˆ ˆˆ.. Ê 1 Œμ ±μ ± μ Ê É Ò Ê É É ³. Œ.. μ³μ μ μ, Œμ ± Í Œ Ì ²ÖÉ É ±μ É μ É Í ( ƒ) μ μ²ö É μ μ ÉÓ É ²Ó- ÊÕ ² ±Í
Ó³ Ÿ. 2015.. 12, º 2(193).. 281Ä298 ˆ ˆŠ Œ ˆ ˆ Œ ƒ Ÿ. ˆŸ ˆ ˆ Œ Ÿ Š Œ ƒˆ Šˆ ˆ Ÿ ˆ ˆ Š ˆˆ ƒ ˆ ˆˆ.. Ê 1 Œμ ±μ ± μ Ê É Ò Ê É É ³. Œ.. μ³μ μ μ, Œμ ± Í Œ Ì ²ÖÉ É ±μ É μ É Í ( ƒ) μ μ²ö É μ μ ÉÓ É ²Ó- ÊÕ ² ±Í
 ) * +, -. + / - 0 1 2 3 4 5 6 7 8 9 6 : ; < 8 = 8 9 >? @ A 4 5 6 7 8 9 6 ; = B? @ : C B B D 9 E : F 9 C 6 < G 8 B A F A > < C 6 < B H 8 9 I 8 9 E ) * +, -. + / J - 0 1 2 3 J K 3 L M N L O / 1 L 3 O 2,
) * +, -. + / - 0 1 2 3 4 5 6 7 8 9 6 : ; < 8 = 8 9 >? @ A 4 5 6 7 8 9 6 ; = B? @ : C B B D 9 E : F 9 C 6 < G 8 B A F A > < C 6 < B H 8 9 I 8 9 E ) * +, -. + / J - 0 1 2 3 J K 3 L M N L O / 1 L 3 O 2,
Problem 3.16 Given B = ˆx(z 3y) +ŷ(2x 3z) ẑ(x+y), find a unit vector parallel. Solution: At P = (1,0, 1), ˆb = B
 +ŷ(2x 3z) ẑ(x+y), find a unit vector parallel. Solution: At P = (1,0, 1), ˆb = B") Problem 3.6 Given B = ˆxz 3y) +ŷx 3z) ẑx+y), find a unit vector parallel to B at point P =,0, ). Solution: At P =,0, ), B = ˆx )+ŷ+3) ẑ) = ˆx+ŷ5 ẑ, ˆb = B B = ˆx+ŷ5 ẑ = ˆx+ŷ5 ẑ. +5+ 7 Problem 3.4 Convert
Problem 3.6 Given B = ˆxz 3y) +ŷx 3z) ẑx+y), find a unit vector parallel to B at point P =,0, ). Solution: At P =,0, ), B = ˆx )+ŷ+3) ẑ) = ˆx+ŷ5 ẑ, ˆb = B B = ˆx+ŷ5 ẑ = ˆx+ŷ5 ẑ. +5+ 7 Problem 3.4 Convert
Pathological synchronization in neuronal populations : a control theoretic perspective
 Pathological synchronization in neuronal populations : a control theoretic perspective Alessio Franci To cite this version: Alessio Franci. Pathological synchronization in neuronal populations : a control
Pathological synchronization in neuronal populations : a control theoretic perspective Alessio Franci To cite this version: Alessio Franci. Pathological synchronization in neuronal populations : a control
Το ελαστικο κωνικο εκκρεμε ς
 Το ελαστικο κωνικο εκκρεμε ς 1. Εξισώσεις Euler -Lagrange x 0 φ θ z F l 0 y r m B Το ελαστικό κωνικό εκκρεμές αποτελείται από ένα ελατήριο με σταθερά επαναφοράς k, το οποίο αναρτάται από ένα σταθερό σημείο,
Το ελαστικο κωνικο εκκρεμε ς 1. Εξισώσεις Euler -Lagrange x 0 φ θ z F l 0 y r m B Το ελαστικό κωνικό εκκρεμές αποτελείται από ένα ελατήριο με σταθερά επαναφοράς k, το οποίο αναρτάται από ένα σταθερό σημείο,
... 5 A.. RS-232C ( ) RS-232C ( ) RS-232C-LK & RS-232C-MK RS-232C-JK & RS-232C-KK
 RS-232C ( ) RS-232C-LK & RS-232C-MK RS-232C-JK & RS-232C-KK") RS-3C WIWM050 014.1.9 P1 :8... 1... 014.0.1 1 A... 014.0. 1... RS-3C()...01.08.03 A.. RS-3C()...01.08.03 3... RS-3C()... 003.11.5 4... RS-3C ()... 00.10.01 5... RS-3C().008.07.16 5 A.. RS-3C().0 1.08.
RS-3C WIWM050 014.1.9 P1 :8... 1... 014.0.1 1 A... 014.0. 1... RS-3C()...01.08.03 A.. RS-3C()...01.08.03 3... RS-3C()... 003.11.5 4... RS-3C ()... 00.10.01 5... RS-3C().008.07.16 5 A.. RS-3C().0 1.08.
A 1 A 2 A 3 B 1 B 2 B 3
 16 0 17 0 17 0 18 0 18 0 19 0 20 A A = A 1 î + A 2 ĵ + A 3ˆk A (x, y, z) r = xî + yĵ + zˆk A B A B B A = A 1 B 1 + A 2 B 2 + A 3 B 3 = A B θ θ A B = ˆn A B θ A B î ĵ ˆk = A 1 A 2 A 3 B 1 B 2 B 3 W = F
16 0 17 0 17 0 18 0 18 0 19 0 20 A A = A 1 î + A 2 ĵ + A 3ˆk A (x, y, z) r = xî + yĵ + zˆk A B A B B A = A 1 B 1 + A 2 B 2 + A 3 B 3 = A B θ θ A B = ˆn A B θ A B î ĵ ˆk = A 1 A 2 A 3 B 1 B 2 B 3 W = F
ΘΕΜΑ 1. Στο φορέα του σχήματος ζητούνται να χαραχθούν τα διαγράμματα M, Q, N. (3 μονάδες)
") ΘΕΜΑ ΔΕΔΟΜΕΝΑ: Στο φορέα του σχήματος ζητούνται να χαραχθούν τα διαγράμματα M, Q, N. (3 μονάδες) ΕΠΙΛΥΣΗ: Ο φορέας χωρίζεται στα τμήματα Α και Β. Το τμήμα Α είναι τριαρθρωτό τόξο. Απομονώνοντας το Α και
ΘΕΜΑ ΔΕΔΟΜΕΝΑ: Στο φορέα του σχήματος ζητούνται να χαραχθούν τα διαγράμματα M, Q, N. (3 μονάδες) ΕΠΙΛΥΣΗ: Ο φορέας χωρίζεται στα τμήματα Α και Β. Το τμήμα Α είναι τριαρθρωτό τόξο. Απομονώνοντας το Α και
Τριγωνοµετρική (ή πολική) µορφή µιγαδικού αριθµού. Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM
 µορφή µιγαδικού αριθµού. Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM") 1 Τριγωνοµετρική (ή πολική µορφή µιγαδικού αριθµού Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM η αντίστοιχη διανυσµατική ακτίνα του Ονοµάζοµε όρισµα του µιγαδικού αριθµού z κάθε µια από τις
1 Τριγωνοµετρική (ή πολική µορφή µιγαδικού αριθµού Έστω z = x+ yi ένας µη µηδενικός µιγαδικός αριθµός και OM η αντίστοιχη διανυσµατική ακτίνα του Ονοµάζοµε όρισµα του µιγαδικού αριθµού z κάθε µια από τις
A Two-Sided Laplace Inversion Algorithm with Computable Error Bounds and Its Applications in Financial Engineering
 Electronic Companion A Two-Sie Laplace Inversion Algorithm with Computable Error Bouns an Its Applications in Financial Engineering Ning Cai, S. G. Kou, Zongjian Liu HKUST an Columbia University Appenix
Electronic Companion A Two-Sie Laplace Inversion Algorithm with Computable Error Bouns an Its Applications in Financial Engineering Ning Cai, S. G. Kou, Zongjian Liu HKUST an Columbia University Appenix
Ax = b. 7x = 21. x = 21 7 = 3.
 3 s st 3 r 3 t r 3 3 t s st t 3t s 3 3 r 3 3 st t t r 3 s t t r r r t st t rr 3t r t 3 3 rt3 3 t 3 3 r st 3 t 3 tr 3 r t3 t 3 s st t Ax = b. s t 3 t 3 3 r r t n r A tr 3 rr t 3 t n ts b 3 t t r r t x 3
3 s st 3 r 3 t r 3 3 t s st t 3t s 3 3 r 3 3 st t t r 3 s t t r r r t st t rr 3t r t 3 3 rt3 3 t 3 3 r st 3 t 3 tr 3 r t3 t 3 s st t Ax = b. s t 3 t 3 3 r r t n r A tr 3 rr t 3 t n ts b 3 t t r r t x 3
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 7.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 7.1 - Μηχανισμοί & Εισαγωγή στο Σχεδιασμό Μηχανών Ακαδημαϊκό έτος: 214-215 Copyright ΕΜΠ
( ) ) V(x, y, z) Παραδείγματα. dt + "z ˆk + z d ˆk. v 2 =!x 2 +!y 2 +!z 2. F =! "p. T = 1 2 m (!x2 +!y 2 +!z 2
 ) V(x, y, z) Παραδείγματα. dt + z ˆk + z d ˆk. v 2 =!x 2 +!y 2 +!z 2. F =! p. T = 1 2 m (!x2 +!y 2 +!z 2") ΦΥΣ 211 - Διαλ.04 1 Παραδείγματα Κίνηση ενός και μόνο σωματιδίου, χρησιμοποιώντας Καρτεσιανές συντεταγμένες και συντηρητικές δυνάμεις. Οι εξισώσεις Lagrange θα πρέπει να επιστρέφουν τα ίδια αποτελέσματα
ΦΥΣ 211 - Διαλ.04 1 Παραδείγματα Κίνηση ενός και μόνο σωματιδίου, χρησιμοποιώντας Καρτεσιανές συντεταγμένες και συντηρητικές δυνάμεις. Οι εξισώσεις Lagrange θα πρέπει να επιστρέφουν τα ίδια αποτελέσματα
Radio détection des rayons cosmiques d ultra-haute énergie : mise en oeuvre et analyse des données d un réseau de stations autonomes.
 Radio détection des rayons cosmiques d ultra-haute énergie : mise en oeuvre et analyse des données d un réseau de stations autonomes. Diego Torres Machado To cite this version: Diego Torres Machado. Radio
Radio détection des rayons cosmiques d ultra-haute énergie : mise en oeuvre et analyse des données d un réseau de stations autonomes. Diego Torres Machado To cite this version: Diego Torres Machado. Radio
m 1, m 2 F 12, F 21 F12 = F 21
 m 1, m 2 F 12, F 21 F12 = F 21 r 1, r 2 r = r 1 r 2 = r 1 r 2 ê r = rê r F 12 = f(r)ê r F 21 = f(r)ê r f(r) f(r) < 0 f(r) > 0 m 1 r1 = f(r)ê r m 2 r2 = f(r)ê r r = r 1 r 2 r 1 = 1 m 1 f(r)ê r r 2 = 1 m
m 1, m 2 F 12, F 21 F12 = F 21 r 1, r 2 r = r 1 r 2 = r 1 r 2 ê r = rê r F 12 = f(r)ê r F 21 = f(r)ê r f(r) f(r) < 0 f(r) > 0 m 1 r1 = f(r)ê r m 2 r2 = f(r)ê r r = r 1 r 2 r 1 = 1 m 1 f(r)ê r r 2 = 1 m
ITU-R P (2012/02) &' (
 &' (") ITU-R P.530-4 (0/0) $ % " "#! &' ( P ITU-R P. 530-4 ii.. (IPR) (ITU-T/ITU-R/ISO/IEC).ITU-R http://www.itu.int/itu-r/go/patents/en. ITU-T/ITU-R/ISO/IEC (http://www.itu.int/publ/r-rec/en ) () ( ) BO BR BS
ITU-R P.530-4 (0/0) $ % " "#! &' ( P ITU-R P. 530-4 ii.. (IPR) (ITU-T/ITU-R/ISO/IEC).ITU-R http://www.itu.int/itu-r/go/patents/en. ITU-T/ITU-R/ISO/IEC (http://www.itu.int/publ/r-rec/en ) () ( ) BO BR BS
x(t) = (x 1 (t), x 1 (t),..., x n (t)) R n R [a, b] t 1:1 c 2 : x(t) = (x(t), y(t)) = (cos t, sin t), t 0, π ]
![x(t) = (x 1 (t), x 1 (t),..., x n (t)) R n R [a, b] t 1:1 c 2 : x(t) = (x(t), y(t)) = (cos t, sin t), t 0, π ]](/thumbs/28/13017068.jpg "x(t) = (x 1 (t), x 1 (t),..., x n (t)) R n R [a, b] t 1:1 c 2 : x(t) = (x(t), y(t)) = (cos t, sin t), t 0, π ]") συνεχές τόξο (arc) - τροχιά R [a, b] t 1:1 επί x(t) = (x 1 (t), x 1 (t),..., x n (t)) R n x i (t), i = 1, 2,..., n συνεχείς συναρτήσεις, π.χ c 1 : x(t) = (x(t), y(t)) = (1 t, 1 t), t [0, 1] [ c 2 : x(t)
συνεχές τόξο (arc) - τροχιά R [a, b] t 1:1 επί x(t) = (x 1 (t), x 1 (t),..., x n (t)) R n x i (t), i = 1, 2,..., n συνεχείς συναρτήσεις, π.χ c 1 : x(t) = (x(t), y(t)) = (1 t, 1 t), t [0, 1] [ c 2 : x(t)
Θεωρητική μηχανική ΙΙ
 ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
ΟΣΑ ΓΡΑΦΟΝΤΑΙ ΕΔΩ ΝΑ ΤΑ ΔΙΑΒΑΖΕΤΕ ΜΕ ΣΚΕΠΤΙΚΟ ΒΛΕΜΜΑ. ΜΠΟΡΕΙ ΝΑ ΠΕΡΙΕΧΟΥΝ ΛΑΘΗ. Θεωρητική μηχανική ΙΙ Να δειχθεί ότι αν L x, L y αποτελούν ολοκληρώματα της κίνησης τότε και η L z αποτελεί ολοκλήρωμα της
N/m, k 2 = k 4 = 6 N/m και m=2 kgr. (α) k 1 m k 3 k 4. (β) k 12 m k 34. k 12 = k 1 +k 2 = 3+6 = 9 N/m (1) k k = = = = 2 N/m (2) (3) k 2.
 k 1 m k 3 k 4. (β) k 12 m k 34. k 12 = k 1 +k 2 = 3+6 = 9 N/m (1) k k = = = = 2 N/m (2) (3) k 2.") ΚΕΦΑΛΑΙΟ ΤΑΛΑΝΤΩΣΗ ΥΝΑΜΙΚΏΝ ΣΥΣΤΗΜΑΤΩΝ ΜΕ ΕΝΑ ΒΑΘΜΟ ΕΛΕΥΘΕΡΙΑΣ. Ελεύθερη ταλάντωση χωρίς απόσβεση. Να βρεθεί η ιδιοσυχνότητα του συστήµατος στο σχήµα (α). ίνεται 3 3 N/m, 4 6 N/m και m gr. (α) m 3 4 (β)
ΚΕΦΑΛΑΙΟ ΤΑΛΑΝΤΩΣΗ ΥΝΑΜΙΚΏΝ ΣΥΣΤΗΜΑΤΩΝ ΜΕ ΕΝΑ ΒΑΘΜΟ ΕΛΕΥΘΕΡΙΑΣ. Ελεύθερη ταλάντωση χωρίς απόσβεση. Να βρεθεί η ιδιοσυχνότητα του συστήµατος στο σχήµα (α). ίνεται 3 3 N/m, 4 6 N/m και m gr. (α) m 3 4 (β)
ΜΗΧΑΝΙΣΜΟΙ ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ
 ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 8. - opyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 202. Με επιφύλαξη παντός δικαιώµατος. ll rights reserved. Απαγορεύεται
ΜΗΧΑΝΙΣΜΟΙ & ΕΙΣΑΓΩΓΗ ΣΤΟ ΣΧΕΔΙΑΣΜΟ ΜΗΧΑΝΩΝ - 8. - opyright ΕΜΠ - Σχολή Μηχανολόγων Μηχανικών - Εργαστήριο Δυναμικής και Κατασκευών - 202. Με επιφύλαξη παντός δικαιώµατος. ll rights reserved. Απαγορεύεται
Θεωρία μετασχηματισμών
 Μήτρα Μετασχηματισμού Η γεωμετρία ενός αντικειμένου μπορεί να παρουσιαστεί από ένα σύνολο σημείων κατανεμημένων σε διάφορα επίπεδα. Έτσι λοιπόν ένα πλήθος δεδομένων για κάποιο αντικείμενο μπορεί να αναπαρασταθεί
Μήτρα Μετασχηματισμού Η γεωμετρία ενός αντικειμένου μπορεί να παρουσιαστεί από ένα σύνολο σημείων κατανεμημένων σε διάφορα επίπεδα. Έτσι λοιπόν ένα πλήθος δεδομένων για κάποιο αντικείμενο μπορεί να αναπαρασταθεί
ITU-R P (2009/10)
") ITU-R.45-4 (9/) % # GHz,!"# $$ # ITU-R.45-4.. (IR) (ITU-T/ITU-R/ISO/IEC).ITU-R http://www.tu.t/itu-r/go/patets/e. (http://www.tu.t/publ/r-rec/e ) () ( ) BO BR BS BT F M RA S RS SA SF SM SNG TF V.ITU-R
ITU-R.45-4 (9/) % # GHz,!"# $$ # ITU-R.45-4.. (IR) (ITU-T/ITU-R/ISO/IEC).ITU-R http://www.tu.t/itu-r/go/patets/e. (http://www.tu.t/publ/r-rec/e ) () ( ) BO BR BS BT F M RA S RS SA SF SM SNG TF V.ITU-R
298 Appendix A Selected Answers
 A Selected Answers 1.1.1. (/3)x +(1/3) 1.1.. y = x 1.1.3. ( /3)x +(1/3) 1.1.4. y = x+,, 1.1.5. y = x+6, 6, 6 1.1.6. y = x/+1/, 1/, 1.1.7. y = 3/, y-intercept: 3/, no x-intercept 1.1.8. y = ( /3)x,, 3 1.1.9.
A Selected Answers 1.1.1. (/3)x +(1/3) 1.1.. y = x 1.1.3. ( /3)x +(1/3) 1.1.4. y = x+,, 1.1.5. y = x+6, 6, 6 1.1.6. y = x/+1/, 1/, 1.1.7. y = 3/, y-intercept: 3/, no x-intercept 1.1.8. y = ( /3)x,, 3 1.1.9.
( ) ( ) ( ) ( ) ( ) λ = 1 + t t. θ = t ε t. Continuum Mechanics. Chapter 1. Description of Motion dt t. Chapter 2. Deformation and Strain
 ( ) ( ) ( ) ( ) λ = 1 + t t. θ = t ε t. Continuum Mechanics. Chapter 1. Description of Motion dt t. Chapter 2. Deformation and Strain") Continm Mechanics. Official Fom Chapte. Desciption of Motion χ (,) t χ (,) t (,) t χ (,) t t Chapte. Defomation an Stain s S X E X e i ij j i ij j F X X U F J T T T U U i j Uk U k E ( F F ) ( J J J J)
Continm Mechanics. Official Fom Chapte. Desciption of Motion χ (,) t χ (,) t (,) t χ (,) t t Chapte. Defomation an Stain s S X E X e i ij j i ij j F X X U F J T T T U U i j Uk U k E ( F F ) ( J J J J)
Κεραίες & Ασύρματες Ζεύξεις
 Κεραίες & Ασύρματες Ζεύξεις Εισαγωγή στις ΣΤΟΙΧΕΙΟΚΕΡΑΙΕΣ Το μάθημα αυτό πραγματεύεται το αντικείμενο των κεραιών και των Ασύρματων Ζεύξεων. Περιέχει τη θεμελίωση και τις βασικές έννοιες /αρχές που διέπουν
Κεραίες & Ασύρματες Ζεύξεις Εισαγωγή στις ΣΤΟΙΧΕΙΟΚΕΡΑΙΕΣ Το μάθημα αυτό πραγματεύεται το αντικείμενο των κεραιών και των Ασύρματων Ζεύξεων. Περιέχει τη θεμελίωση και τις βασικές έννοιες /αρχές που διέπουν
Das Pentagramma Mirificum von Gauß
 Wissenschaftliche Prüfungsarbeit gemäß 1 der Landesverordnung über die Erste Staatsprüfung für das Lehramt an Gymnasien vom 07. Mai 198, in der derzeit gültigen Fassung Kandidatin: Jennifer Romina Pütz
Wissenschaftliche Prüfungsarbeit gemäß 1 der Landesverordnung über die Erste Staatsprüfung für das Lehramt an Gymnasien vom 07. Mai 198, in der derzeit gültigen Fassung Kandidatin: Jennifer Romina Pütz
Homework#13 Trigonometry Honors Study Guide for Final Test#3
 Homework#13 Trigonometry Honors Study Guide for Final Test#3 1. Στο παρακάτω σχήμα δίνεται ο μοναδιαίος κύκλος: Να γράψετε τις συντεταγμένες του σημείου ή το όνομα του άξονα: 1. (ε 1) είναι ο άξονας 11.
Homework#13 Trigonometry Honors Study Guide for Final Test#3 1. Στο παρακάτω σχήμα δίνεται ο μοναδιαίος κύκλος: Να γράψετε τις συντεταγμένες του σημείου ή το όνομα του άξονα: 1. (ε 1) είναι ο άξονας 11.
(ii) x[y (x)] 4 + 2y(x) = 2x. (vi) y (x) = x 2 sin x
![(ii) x[y (x)] 4 + 2y(x) = 2x. (vi) y (x) = x 2 sin x](/thumbs/62/47493101.jpg "(ii) x[y (x)] 4 + 2y(x) = 2x. (vi) y (x) = x 2 sin x") ΕΥΓΕΝΙΑ Ν. ΠΕΤΡΟΠΟΥΛΟΥ ΕΠΙΚ. ΚΑΘΗΓΗΤΡΙΑ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΑΣΚΗΣΕΙΣ ΓΙΑ ΤΟ ΜΑΘΗΜΑ «ΕΦΑΡΜΟΣΜΕΝΑ ΜΑΘΗΜΑΤΙΚΑ ΙΙΙ» ΠΑΤΡΑ 2015 1 Ασκήσεις 1η ομάδα ασκήσεων 1. Να χαρακτηρισθούν πλήρως
ΕΥΓΕΝΙΑ Ν. ΠΕΤΡΟΠΟΥΛΟΥ ΕΠΙΚ. ΚΑΘΗΓΗΤΡΙΑ ΤΜΗΜΑ ΠΟΛΙΤΙΚΩΝ ΜΗΧΑΝΙΚΩΝ ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΑΣΚΗΣΕΙΣ ΓΙΑ ΤΟ ΜΑΘΗΜΑ «ΕΦΑΡΜΟΣΜΕΝΑ ΜΑΘΗΜΑΤΙΚΑ ΙΙΙ» ΠΑΤΡΑ 2015 1 Ασκήσεις 1η ομάδα ασκήσεων 1. Να χαρακτηρισθούν πλήρως
ÒÄÆÉÖÌÄ. ÀÒÀßÒ ÉÅÉ ÓÀÌÀÒÈÉ ÖÍØÝÉÏÍÀËÖÒ-ÃÉ ÄÒÄÍÝÉÀËÖÒÉ ÂÀÍÔÏËÄÁÄÁÉÓÈÅÉÓ ÃÀÌÔÊÉ- ÝÄÁÖËÉÀ ÀÌÏÍÀáÓÍÉÓ ÅÀÒÉÀÝÉÉÓ ÏÒÌÖËÄÁÉ, ÒÏÌËÄÁÛÉÝ ÂÀÌÏÅËÄÍÉËÉÀ ÓÀßÚÉÓÉ
 ÒÄÆÉÖÌÄ. ÀÒÀßÒ ÉÅÉ ÓÀÌÀÒÈÉ ÖÍØÝÉÏÍÀËÖÒ-ÃÉ ÄÒÄÍÝÉÀËÖÒÉ ÂÀÍÔÏËÄÁÄÁÉÓÈÅÉÓ ÃÀÌÔÊÉ- ÝÄÁÖËÉÀ ÀÌÏÍÀáÓÍÉÓ ÅÀÒÉÀÝÉÉÓ ÏÒÌÖËÄÁÉ, ÒÏÌËÄÁÛÉÝ ÂÀÌÏÅËÄÍÉËÉÀ ÓÀßÚÉÓÉ ÌÏÌÄÍÔÉÓÀ ÃÀ ÃÀÂÅÉÀÍÄÁÄÁÉÓ ÛÄÛ ÏÈÄÁÉÓ Ä ÄØÔÉ, ÀÂÒÄÈÅÄ
ÒÄÆÉÖÌÄ. ÀÒÀßÒ ÉÅÉ ÓÀÌÀÒÈÉ ÖÍØÝÉÏÍÀËÖÒ-ÃÉ ÄÒÄÍÝÉÀËÖÒÉ ÂÀÍÔÏËÄÁÄÁÉÓÈÅÉÓ ÃÀÌÔÊÉ- ÝÄÁÖËÉÀ ÀÌÏÍÀáÓÍÉÓ ÅÀÒÉÀÝÉÉÓ ÏÒÌÖËÄÁÉ, ÒÏÌËÄÁÛÉÝ ÂÀÌÏÅËÄÍÉËÉÀ ÓÀßÚÉÓÉ ÌÏÌÄÍÔÉÓÀ ÃÀ ÃÀÂÅÉÀÍÄÁÄÁÉÓ ÛÄÛ ÏÈÄÁÉÓ Ä ÄØÔÉ, ÀÂÒÄÈÅÄ
Déformation et quantification par groupoïde des variétés toriques
 Défomation et uantification pa goupoïde de vaiété toiue Fédéic Cadet To cite thi veion: Fédéic Cadet. Défomation et uantification pa goupoïde de vaiété toiue. Mathématiue [math]. Univeité d Oléan, 200.
Défomation et uantification pa goupoïde de vaiété toiue Fédéic Cadet To cite thi veion: Fédéic Cadet. Défomation et uantification pa goupoïde de vaiété toiue. Mathématiue [math]. Univeité d Oléan, 200.
ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 4// ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ α) Για δεδομένη αρχική ταχύτητα υ, με ποια γωνία
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 4// ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ α) Για δεδομένη αρχική ταχύτητα υ, με ποια γωνία
 η η η η GAR = 1 F RR η F RR F AR F AR F RR η F RR F AR µ µ µ µ µ µ Γ R N=mxn W T X x mean X W T x g W P x = W T (x g x mean ) X = X x mean P x = W T X d P x P i, i = 1, 2..., G M s t t
η η η η GAR = 1 F RR η F RR F AR F AR F RR η F RR F AR µ µ µ µ µ µ Γ R N=mxn W T X x mean X W T x g W P x = W T (x g x mean ) X = X x mean P x = W T X d P x P i, i = 1, 2..., G M s t t
( ) = ( ) Μάθημα 2 ο ΒΑΘΜΟΣ ΠΙΝΑΚΑ. Θεωρία : Γραμμική Άλγεβρα : εδάφιο 4, σελ. 63, Πρόταση 4.9, σελ. 90. Βασικές ιδιότητες
 = ( ) Μάθημα 2 ο ΒΑΘΜΟΣ ΠΙΝΑΚΑ. Θεωρία : Γραμμική Άλγεβρα : εδάφιο 4, σελ. 63, Πρόταση 4.9, σελ. 90. Βασικές ιδιότητες") Ανάλυση Πινάκων και Εφαρμογές Σελίδα 1 από 6 Μάθημα 2 ο ΒΑΘΜΟΣ ΠΙΝΑΚΑ Θεωρία : Γραμμική Άλγεβρα : εδάφιο 4, σελ. 63, Πρόταση 4.9, σελ. 90. Βασικές ιδιότητες Έστω A είναι μ ν πίνακας. Τότε 1. ranka= ranka
Ανάλυση Πινάκων και Εφαρμογές Σελίδα 1 από 6 Μάθημα 2 ο ΒΑΘΜΟΣ ΠΙΝΑΚΑ Θεωρία : Γραμμική Άλγεβρα : εδάφιο 4, σελ. 63, Πρόταση 4.9, σελ. 90. Βασικές ιδιότητες Έστω A είναι μ ν πίνακας. Τότε 1. ranka= ranka
Αρµονικοί ταλαντωτές
 Αρµονικοί ταλαντωτές ΦΥΣ 111 - Διαλ. 38 Εκκρεµή - Απλό εκκρεµές θ T mg r F τ = r F = mgsinθ τ = I M d θ α, Ι = M dt = Mgsinθ d θ dt = g sinθ θ = g sinθ Διαφορική εξίσωση Αυτή η εξίσωση είναι δύσκολο να
Αρµονικοί ταλαντωτές ΦΥΣ 111 - Διαλ. 38 Εκκρεµή - Απλό εκκρεµές θ T mg r F τ = r F = mgsinθ τ = I M d θ α, Ι = M dt = Mgsinθ d θ dt = g sinθ θ = g sinθ Διαφορική εξίσωση Αυτή η εξίσωση είναι δύσκολο να
apj1 SSGA* hapla P6 _1G hao1 1Lh_PSu AL..AhAo1 *PJ"AL hp_a*a
 n n 1/2 n (n 1) 0/1 l 2 E x X X x X E x X g(x) := 1 g(x). X f : X C L p f p := (E x X f(x) p ) 1/p f,g := E x X f(x)g(x) x X X X X := {f : X [0, ) : f 1 =1}. X µ A A X x X µ A (x) :=α 1 1 A (x) 1 A A α
n n 1/2 n (n 1) 0/1 l 2 E x X X x X E x X g(x) := 1 g(x). X f : X C L p f p := (E x X f(x) p ) 1/p f,g := E x X f(x)g(x) x X X X X := {f : X [0, ) : f 1 =1}. X µ A A X x X µ A (x) :=α 1 1 A (x) 1 A A α
Παραγωγος στον Διανυσματικο Χωρο {Παράγωγος Διανύσματος, Ο Τελεστής και οι Τρεις Βασικές Διεργασίες: Κλίση- Απόκλιση- Στροβιλισμός}
 Κεφάλαιο 1 ΜΑΘΗΜΑΤΙΚΗ ΕΙΣΑΓΩΓΗ Εσωτερικο & Εξωτερικο Γινομενο Διανυσματων {Ορισμοί} Δυναμεις {Διανυσματικός Χαρακτήρας Δυνάμεων, Σύνθεση Δυνάμεων} Ροπη {Η Εννοια της Ροπής, Ροπή Πολλών Δυνάμεων, Ζεύγος
Κεφάλαιο 1 ΜΑΘΗΜΑΤΙΚΗ ΕΙΣΑΓΩΓΗ Εσωτερικο & Εξωτερικο Γινομενο Διανυσματων {Ορισμοί} Δυναμεις {Διανυσματικός Χαρακτήρας Δυνάμεων, Σύνθεση Δυνάμεων} Ροπη {Η Εννοια της Ροπής, Ροπή Πολλών Δυνάμεων, Ζεύγος
Formulario Básico ( ) ( ) ( ) ( ) ( 1) ( 1) ( 2) ( 2) λ = 1 + t t. θ = t ε t. Mecánica de Medios Continuos. Grado en Ingeniería Civil.
 ( ) ( ) ( ) ( 1) ( 1) ( 2) ( 2) λ = 1 + t t. θ = t ε t. Mecánica de Medios Continuos. Grado en Ingeniería Civil.") Mecánica e Meios Continos. Gao en Ingenieía Ciil. Fomlaio Básico Tema. Descipción el moimiento χ (,) t χ (,) t (,) t χ (,) t t t Tema. Defomación s S X E X e i ij j i ij j F X X U F J T T T U U i j Uk
Mecánica e Meios Continos. Gao en Ingenieía Ciil. Fomlaio Básico Tema. Descipción el moimiento χ (,) t χ (,) t (,) t χ (,) t t t Tema. Defomación s S X E X e i ij j i ij j F X X U F J T T T U U i j Uk
!"#$ % &# &%#'()(! $ * +
(! $ * +") ,!"#$ % &# &%#'()(! $ * + ,!"#$ % &# &%#'()(! $ * + 6 7 57 : - - / :!", # $ % & :'!(), 5 ( -, * + :! ",, # $ %, ) #, '(#,!# $$,',#-, 4 "- /,#-," -$ '# &",,#- "-&)'#45)')6 5! 6 5 4 "- /,#-7 ",',8##! -#9,!"))
,!"#$ % &# &%#'()(! $ * + ,!"#$ % &# &%#'()(! $ * + 6 7 57 : - - / :!", # $ % & :'!(), 5 ( -, * + :! ",, # $ %, ) #, '(#,!# $$,',#-, 4 "- /,#-," -$ '# &",,#- "-&)'#45)')6 5! 6 5 4 "- /,#-7 ",',8##! -#9,!"))
ΦΥΣ. 131 Τελική Εξέταση: 13-Δεκεμβρίου-2006
 Σειρά Θέση ΦΥΣ. 3 Τελική Εξέταση: 3-Δεκεμβρίου-6 Πριν αρχίσετε συμπληρώστε τα στοιχεία σας (ονοματεπώνυμο και αριθμό ταυτότητας). Ονοματεπώνυμο Αριθμός ταυτότητας Σας δίνονται ισότιμα προβλήματα ( βαθμοί
Σειρά Θέση ΦΥΣ. 3 Τελική Εξέταση: 3-Δεκεμβρίου-6 Πριν αρχίσετε συμπληρώστε τα στοιχεία σας (ονοματεπώνυμο και αριθμό ταυτότητας). Ονοματεπώνυμο Αριθμός ταυτότητας Σας δίνονται ισότιμα προβλήματα ( βαθμοί
Ταλαντώσεις 6.1 Απλή Αρµονική Ταλάντωση σε µία ιάσταση Ελατήριο σε οριζόντιο επίπεδο Σχήµα 6.1
 6 Ταλαντώσεις 6.1 Απλή Αρµονική Ταλάντωση σε µία ιάσταση 6.1.1 Ελατήριο σε οριζόντιο επίπεδο Υποθέτουµε ότι το ελατήριο έχει αρχικό µήκος µηδέν, ιδανικό ελατήριο. F=-kx x K M x Σχήµα 6.1 ιαστάσεις µεγεθών
6 Ταλαντώσεις 6.1 Απλή Αρµονική Ταλάντωση σε µία ιάσταση 6.1.1 Ελατήριο σε οριζόντιο επίπεδο Υποθέτουµε ότι το ελατήριο έχει αρχικό µήκος µηδέν, ιδανικό ελατήριο. F=-kx x K M x Σχήµα 6.1 ιαστάσεις µεγεθών
Επίλυση Δ.Ε. με Laplace
 Επίλυση Δ.Ε. με Laplace Ν. Παπαδάκης 24 Οκτωβρίου 2015 Ν. Παπαδάκης Επίλυση Δ.Ε. με Laplace 24 Οκτωβρίου 2015 1 / 78 Περιεχόμενα 1 Παρουσίαση Προβλήματος Επίλυση διαϕορικής εξίσωσης Ορισμός Άλλες μορϕή
Επίλυση Δ.Ε. με Laplace Ν. Παπαδάκης 24 Οκτωβρίου 2015 Ν. Παπαδάκης Επίλυση Δ.Ε. με Laplace 24 Οκτωβρίου 2015 1 / 78 Περιεχόμενα 1 Παρουσίαση Προβλήματος Επίλυση διαϕορικής εξίσωσης Ορισμός Άλλες μορϕή
m 2 (ż2 + R 2 θ2 )dt ż = a/t + ζ, θ = η m 2 ( ζ 2 + R 2 η 2 )dt m
dt ż = a/t + ζ, θ = η m 2 ( ζ 2 + R 2 η 2 )dt m") Λύσεις Μηχ. ΙΙ Σεπτεµβριος 9 Πρόβληµα 1 Η Λαγκραντζιανή είναι L = (ż + R θ ) Η δράση που αντιστοιχεί στη διαδροµή z(t), θ(t) που αρχίζει στο z() =, θ() = και καταλήγει στο θ( ) = z( ) = είναι: S = (ż +
Λύσεις Μηχ. ΙΙ Σεπτεµβριος 9 Πρόβληµα 1 Η Λαγκραντζιανή είναι L = (ż + R θ ) Η δράση που αντιστοιχεί στη διαδροµή z(t), θ(t) που αρχίζει στο z() =, θ() = και καταλήγει στο θ( ) = z( ) = είναι: S = (ż +
Solutions - Chapter 4
 Solutions - Chapter Kevin S. Huang Problem.1 Unitary: Ût = 1 ī hĥt Û tût = 1 Neglect t term: 1 + hĥ ī t 1 īhĥt = 1 + hĥ ī t ī hĥt = 1 Ĥ = Ĥ Problem. Ût = lim 1 ī ] n hĥ1t 1 ī ] hĥt... 1 ī ] hĥnt 1 ī ]
Solutions - Chapter Kevin S. Huang Problem.1 Unitary: Ût = 1 ī hĥt Û tût = 1 Neglect t term: 1 + hĥ ī t 1 īhĥt = 1 + hĥ ī t ī hĥt = 1 Ĥ = Ĥ Problem. Ût = lim 1 ī ] n hĥ1t 1 ī ] hĥt... 1 ī ] hĥnt 1 ī ]
 B G [0; 1) S S # S y 1 ; y 3 0 t 20 y 2 ; y 4 0 t 20 y 1 y 2 h n t: r = 10 5 ; a = 10 6 ei n = ỹi n y i t n ); i = 1; 3: r = 10 5 ; a = 10 6 ei n = ỹi n y i t n ); i = 2; 4: r = 10 5 ; a = 10 6 t = 20
B G [0; 1) S S # S y 1 ; y 3 0 t 20 y 2 ; y 4 0 t 20 y 1 y 2 h n t: r = 10 5 ; a = 10 6 ei n = ỹi n y i t n ); i = 1; 3: r = 10 5 ; a = 10 6 ei n = ỹi n y i t n ); i = 2; 4: r = 10 5 ; a = 10 6 t = 20
2742/ 207/ /07.10.1999 «&»
 2742/ 207/ /07.10.1999 «&» 1,,,. 2 1. :.,,,..,..,,. 2., :.,....,, ,,..,,..,,,,,..,,,,,..,,,,,,..,,......,,. 3., 1. ' 3 1.., : 1. T,, 2., 3. 2 4. 5. 6. 7. 8. 9..,,,,,,,,, 1 14. 2190/1994 ( 28 ),,..,, 4.,,,,
2742/ 207/ /07.10.1999 «&» 1,,,. 2 1. :.,,,..,..,,. 2., :.,....,, ,,..,,..,,,,,..,,,,,..,,,,,,..,,......,,. 3., 1. ' 3 1.., : 1. T,, 2., 3. 2 4. 5. 6. 7. 8. 9..,,,,,,,,, 1 14. 2190/1994 ( 28 ),,..,, 4.,,,,
Œˆ ˆ ƒ ˆŸ Ÿ ˆ ˆ Ÿ Œˆ ˆ
 Ó³ Ÿ. 2017.. 14, º 1(206).. 176Ä189 ˆ ˆŠ ˆ ˆŠ Š ˆ Œˆ ˆ ƒ ˆŸ Ÿ ˆ ˆ Ÿ Œˆ ˆ.. Š μ,. ˆ. Š Î 1 Ñ Ò É ÉÊÉ Ö ÒÌ ² μ, Ê μé ³ É É Ö μ²êî μ μ μ μ μ ² Ö Êα ÉÖ ²ÒÌ μ μ ÊÐ Ö ³ Ï μ³μðóõ ± μ Ö Êα μ μ Ì μ É. ± μ μ ÊÐ
Ó³ Ÿ. 2017.. 14, º 1(206).. 176Ä189 ˆ ˆŠ ˆ ˆŠ Š ˆ Œˆ ˆ ƒ ˆŸ Ÿ ˆ ˆ Ÿ Œˆ ˆ.. Š μ,. ˆ. Š Î 1 Ñ Ò É ÉÊÉ Ö ÒÌ ² μ, Ê μé ³ É É Ö μ²êî μ μ μ μ μ ² Ö Êα ÉÖ ²ÒÌ μ μ ÊÐ Ö ³ Ï μ³μðóõ ± μ Ö Êα μ μ Ì μ É. ± μ μ ÊÐ
Δορυφορικές Επικοινωνίες
 Δορυφορικές Επικοινωνίες Διάλεξη #3 Μηχανική των Τροχιών - 2 ο Μέρος Διδάσκων: Αθανάσιος Κανάτας Καθηγητής Πανεπιστηµίου Πειραιώς Περιεχόμενα Διάλεξης #3 Παρεκκλίσεις Τροχιών Τροχιές Σύγχρονες στον Ήλιο
Δορυφορικές Επικοινωνίες Διάλεξη #3 Μηχανική των Τροχιών - 2 ο Μέρος Διδάσκων: Αθανάσιος Κανάτας Καθηγητής Πανεπιστηµίου Πειραιώς Περιεχόμενα Διάλεξης #3 Παρεκκλίσεις Τροχιών Τροχιές Σύγχρονες στον Ήλιο
 K K 1 2 1 K M N M(2 N 1) K K K K K f f(x 1, x 2,..., x K ) = K f xk (x k ), x 1, x 2,..., x K K K K f Yk (y k x 1, x 2,..., x k ) k=1 M i, i = 1, 2 Xi n n Yi n Xn 1 Xn 2 ˆM i P (n) e = {( ˆM 1, ˆM2 )
K K 1 2 1 K M N M(2 N 1) K K K K K f f(x 1, x 2,..., x K ) = K f xk (x k ), x 1, x 2,..., x K K K K f Yk (y k x 1, x 2,..., x k ) k=1 M i, i = 1, 2 Xi n n Yi n Xn 1 Xn 2 ˆM i P (n) e = {( ˆM 1, ˆM2 )
( () () ()) () () ()
 () ()) () () ()") ΑΝΑΛΥΣΗ ΙΙ- ΠΟΛΙΤΙΚΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t ( t z( t t I = [ a b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι: d 1 1
ΑΝΑΛΥΣΗ ΙΙ- ΠΟΛΙΤΙΚΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t ( t z( t t I = [ a b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι: d 1 1
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Εξέταση στη Μηχανική ΙI 11 Ιουνίου 2012
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Εξέταση στη Μηχανική ΙI Ιουνίου 202 Απαντήστε και στα 4 Θέματα με σαφήνεια και απλότητα. Οι ολοκληρωμένες απαντήσεις στα ερωτήματα εκτιμώνται ιδιαιτέρως. Καλή σας επιτυχία.
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Εξέταση στη Μηχανική ΙI Ιουνίου 202 Απαντήστε και στα 4 Θέματα με σαφήνεια και απλότητα. Οι ολοκληρωμένες απαντήσεις στα ερωτήματα εκτιμώνται ιδιαιτέρως. Καλή σας επιτυχία.
HMY 799 1: Αναγνώριση Συστημάτων
 HMY 799 : Αναγνώριση Συστημάτων Διάλεξη 5 Εκτίμηση φάσματος ισχύος Συνάφεια Παραδείγματα Στοχαστικά Διανύσματα Autoregressive model with exogenous inputs (ARX y( t + a y( t +... + a y( t n = bu( t +...
HMY 799 : Αναγνώριση Συστημάτων Διάλεξη 5 Εκτίμηση φάσματος ισχύος Συνάφεια Παραδείγματα Στοχαστικά Διανύσματα Autoregressive model with exogenous inputs (ARX y( t + a y( t +... + a y( t n = bu( t +...
Περιεχόμενα. A(x 1, x 2 )
") Περιεχόμενα A(x 1, x 2 7 Ολοκληρώματα της Μαγνητοϋδροδυναμικής και Μαγνητοϋδροδυναμικά Κύματα Σχήμα 7.1: Οι τριδιάστατες ελικοειδείς μαγνητικές γραμμές στις οποίες εφάπτεται το διάνυσμα του μαγνητικού
Περιεχόμενα A(x 1, x 2 7 Ολοκληρώματα της Μαγνητοϋδροδυναμικής και Μαγνητοϋδροδυναμικά Κύματα Σχήμα 7.1: Οι τριδιάστατες ελικοειδείς μαγνητικές γραμμές στις οποίες εφάπτεται το διάνυσμα του μαγνητικού
Παρεμβολή πραγματικού χρόνου σε συστήματα CNC
 Παρεμβολή πραγματικού χρόνου σε συστήματα CNC Γραμμική Κυκλική Spline Γ.Βοσνιάκος-ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ Παρεμβολή πραγματικού χρόνου σε συστήματα CNC Άδεια Χρήσης Το παρόν υλικό υπόκειται σε άδειες χρήσης Creative
Παρεμβολή πραγματικού χρόνου σε συστήματα CNC Γραμμική Κυκλική Spline Γ.Βοσνιάκος-ΕΡΓΑΛΕΙΟΜΗΧΑΝΕΣ Παρεμβολή πραγματικού χρόνου σε συστήματα CNC Άδεια Χρήσης Το παρόν υλικό υπόκειται σε άδειες χρήσης Creative
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Εξέταση στη Μηχανική ΙΙ 8 Ιουλίου 2013
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Εξέταση στη Μηχανική ΙΙ 8 Ιουλίου 013 ΘΕΜΑ Α [35 μόρια] Θεωρήστε τη Λαγκραντζιανή L(x, ẋ, t που εξαρτάται απο τη θέση x ενός σωματιδίου πάνω σε μια ευθεία, το χρόνο t,
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Εξέταση στη Μηχανική ΙΙ 8 Ιουλίου 013 ΘΕΜΑ Α [35 μόρια] Θεωρήστε τη Λαγκραντζιανή L(x, ẋ, t που εξαρτάται απο τη θέση x ενός σωματιδίου πάνω σε μια ευθεία, το χρόνο t,
Κεφάλαιο 1 ΣΥΝΗΘΕΙΣ ΔΙΑΦΟΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ. 1.1 Βασικές έννοιες και ορισμοί
 Κεφάλαιο 1 ΣΥΝΗΘΕΙΣ ΔΙΑΦΟΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Η έννοια της διαφορικής εξίσωσης εμφανίστηκε για πρώτη φορά στο νόμο του Νεύτωνα. Από τότε διαφορικές εξισώσεις ανακύπτουν σε όλες τις φυσικές επιστήμες, αλλά και
Κεφάλαιο 1 ΣΥΝΗΘΕΙΣ ΔΙΑΦΟΡΙΚΕΣ ΕΞΙΣΩΣΕΙΣ Η έννοια της διαφορικής εξίσωσης εμφανίστηκε για πρώτη φορά στο νόμο του Νεύτωνα. Από τότε διαφορικές εξισώσεις ανακύπτουν σε όλες τις φυσικές επιστήμες, αλλά και
Ó³ Ÿ , º 7(156).. 62Ä69. Š Œ œ ƒˆˆ ˆ ˆŠ. .. ŠÊ²Ö μ 1,. ƒ. ²ÓÖ μ 2. μ ± Ê É É Ê Ò μ μ, Œμ ±
.. 62Ä69. Š Œ œ ƒˆˆ ˆ ˆŠ. .. ŠÊ²Ö μ 1,. ƒ. ²ÓÖ μ 2. μ ± Ê É É Ê Ò μ μ, Œμ ±") Ó³ Ÿ. 009.. 6, º 7(156.. 6Ä69 Š Œ œ ƒˆˆ ˆ ˆŠ ˆŒ ˆ - ˆ ƒ ˆ ˆ ˆŸ Š -Œ ˆ Šˆ ˆ.. ŠÊ²Ö μ 1,. ƒ. ²ÓÖ μ μ ± Ê É É Ê Ò μ μ, Œμ ± É ÉÓ μ Ò ÕÉ Ö ²μ Í Ò - μ Ò ² É Ö ³ ÖÉÓ Ì ÒÎ ² ÖÌ, μ²ó ÊÕÐ Ì ±μ ± 4- μ Ò. This paper
Ó³ Ÿ. 009.. 6, º 7(156.. 6Ä69 Š Œ œ ƒˆˆ ˆ ˆŠ ˆŒ ˆ - ˆ ƒ ˆ ˆ ˆŸ Š -Œ ˆ Šˆ ˆ.. ŠÊ²Ö μ 1,. ƒ. ²ÓÖ μ μ ± Ê É É Ê Ò μ μ, Œμ ± É ÉÓ μ Ò ÕÉ Ö ²μ Í Ò - μ Ò ² É Ö ³ ÖÉÓ Ì ÒÎ ² ÖÌ, μ²ó ÊÕÐ Ì ±μ ± 4- μ Ò. This paper
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Μηχανική Ι 22 Ιανουαρίου, 2019
 ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Μηχανική Ι Ιανουαρίου, 9 Καλή σας επιτυχία. Πρόβλημα Α Ένα σωματίδιο μάζας m κινείται υπό την επίδραση του πεδίου δύο σημειακών ελκτικών κέντρων, το ένα εκ των οποίων
ΠΑΝΕΠΙΣΤΗΜΙΟ ΑΘΗΝΩΝ Τμήμα Φυσικής Μηχανική Ι Ιανουαρίου, 9 Καλή σας επιτυχία. Πρόβλημα Α Ένα σωματίδιο μάζας m κινείται υπό την επίδραση του πεδίου δύο σημειακών ελκτικών κέντρων, το ένα εκ των οποίων
Απαντήσεις Θεμάτων Πανελληνίων Εξετάσεων Ημερησίων Γενικών Λυκείων
 0 Ιουνίου 04 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Θετικής & Τεχνολογικής Κατεύθυνσης Απαντήσεις Θεμάτων Πανελληνίων Εξετάσεων Ημερησίων Γενικών Λυκείων ΘΕΜΑ Α Α.. (γ) Α.. (β). Α.3. (γ). Α.4. (β). Α.5. α. Σωστό β. Σωστό
0 Ιουνίου 04 ΦΥΣΙΚΗ ΚΑΤΕΥΘΥΝΣΗΣ Θετικής & Τεχνολογικής Κατεύθυνσης Απαντήσεις Θεμάτων Πανελληνίων Εξετάσεων Ημερησίων Γενικών Λυκείων ΘΕΜΑ Α Α.. (γ) Α.. (β). Α.3. (γ). Α.4. (β). Α.5. α. Σωστό β. Σωστό
( () () ()) () () ()
 () ()) () () ()") ΑΝΑΛΥΣΗ ΙΙ- ΜΗΧΑΝΟΛΟΓΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t, ( t, z( t, t I = [ a, b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι:
ΑΝΑΛΥΣΗ ΙΙ- ΜΗΧΑΝΟΛΟΓΟΙ ΜΗΧΑΝΙΚΟΙ ΦΥΛΛΑΔΙΟ /011 1 Έστω r = r( t = ( x( t, ( t, z( t, t I = [ a, b] συνάρτηση C τάξης και r = r( t = r ( t = x ( t + ( t z ( t είναι μία διανυσματική + Nα αποδείξετε ότι:
(1.1) y (t) = f ( t, y(t) ), a t b, y(a) = y 0.
 y (t) = f ( t, y(t) ), a t b, y(a) = y 0.") 1. Προβλήματα αρχικών τιμών Στο μεγαλύτερο μέρος αυτού του βιβλίου θα ασχοληθούμε με μεθόδους αριθμητικής επίλυσης προβλημάτων αρχικών τιμών για Συνήθεις Διαφορικές Εξισώσεις (Σ.Δ.Ε.). Στο πρώτο κεφάλαιο
1. Προβλήματα αρχικών τιμών Στο μεγαλύτερο μέρος αυτού του βιβλίου θα ασχοληθούμε με μεθόδους αριθμητικής επίλυσης προβλημάτων αρχικών τιμών για Συνήθεις Διαφορικές Εξισώσεις (Σ.Δ.Ε.). Στο πρώτο κεφάλαιο
ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ
 ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 4// ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ α) Για δεδομένη αρχική ταχύτητα υ, με ποια γωνία
ΑΤΕΙ ΠΕΙΡΑΙΑ/ ΣΤΕΦ 4// ΤΜΗΜΑ ΗΛΕΚΤΡΟΝΙΚΩΝ ΥΠΟΛΟΓΙΣΤΙΚΩΝ ΣΥΣΤΗΜΑΤΩΝ ΑΠΑΝΤΗΣΕΙΣ ΓΡΑΠΤΗΣ ΕΞΕΤΑΣΗΣ ΣΤΗ ΦΥΣΙΚΗ ΕΞΕΤΑΣΤΗΣ: ΒΑΡΣΑΜΗΣ ΧΡΗΣΤΟΣ ΔΙΑΡΚΕΙΑ ΩΡΕΣ ΑΣΚΗΣΗ α) Για δεδομένη αρχική ταχύτητα υ, με ποια γωνία
 1 2 3 4 C n a k max 1 = 92% max 1 = 70% max 1 = 60% max 1 = 50% min(p) = 180 max(p) = 180 min(p) = 90 max(p) = 145 min(p) = 0 max(p) = 90 min(w) = w q min(w) = 2 w q min(w) = 3 w q 1 2 3 X L R Z δ
1 2 3 4 C n a k max 1 = 92% max 1 = 70% max 1 = 60% max 1 = 50% min(p) = 180 max(p) = 180 min(p) = 90 max(p) = 145 min(p) = 0 max(p) = 90 min(w) = w q min(w) = 2 w q min(w) = 3 w q 1 2 3 X L R Z δ
E fficient computational tools for the statistical analysis of shape and asymmetryof 3D point sets
 E fficient computational tools for the statistical analysis of shape and asymmetryof 3D point sets Benoît Combès To cite this version: Benoît Combès. E fficient computational tools for the statistical
E fficient computational tools for the statistical analysis of shape and asymmetryof 3D point sets Benoît Combès To cite this version: Benoît Combès. E fficient computational tools for the statistical
ΚΥΚΛΩΜΑΤΑ ΣΤΗ ΜΟΝΙΜΗ ΗΜΙΤΟΝΟΕΙΔΗ ΚΑΤΑΣΤΑΣΗ
 Διανυσματική παράσταση μεταβλητών 1 υ = υ R + υ L υ = V m cos(ωt+θ υ V m = R + ( ωl Im ωl R θ υ = arctan ( Παράσταση μιγαδικού αριθμού Α στο μιγαδικό επίπεδο θ Α Α = ReIAI +jimiai = Α r + ja j ΙΑΙ = A
Διανυσματική παράσταση μεταβλητών 1 υ = υ R + υ L υ = V m cos(ωt+θ υ V m = R + ( ωl Im ωl R θ υ = arctan ( Παράσταση μιγαδικού αριθμού Α στο μιγαδικό επίπεδο θ Α Α = ReIAI +jimiai = Α r + ja j ΙΑΙ = A
 a; b 2 R; a < b; f : [a; b] R! R y 2 R: y : [a; b]! R; ( y (t) = f t; y(t) ; a t b; y(a) = y : f (t; y) 2 [a; b]r: f 2 C ([a; b]r): y 2 C [a; b]; y(a) = y ; f y ỹ ỹ y ; jy ỹ j ky ỹk [a; b]; f y; ( y (t)
a; b 2 R; a < b; f : [a; b] R! R y 2 R: y : [a; b]! R; ( y (t) = f t; y(t) ; a t b; y(a) = y : f (t; y) 2 [a; b]r: f 2 C ([a; b]r): y 2 C [a; b]; y(a) = y ; f y ỹ ỹ y ; jy ỹ j ky ỹk [a; b]; f y; ( y (t)
Problem 3.1 Vector A starts at point (1, 1, 3) and ends at point (2, 1,0). Find a unit vector in the direction of A. Solution: A = 1+9 = 3.
 and ends at point (2, 1,0). Find a unit vector in the direction of A. Solution: A = 1+9 = 3.") Problem 3.1 Vector A starts at point (1, 1, 3) and ends at point (, 1,0). Find a unit vector in the direction of A. Solution: A = ˆx( 1)+ŷ( 1 ( 1))+ẑ(0 ( 3)) = ˆx+ẑ3, A = 1+9 = 3.16, â = A A = ˆx+ẑ3 3.16
Problem 3.1 Vector A starts at point (1, 1, 3) and ends at point (, 1,0). Find a unit vector in the direction of A. Solution: A = ˆx( 1)+ŷ( 1 ( 1))+ẑ(0 ( 3)) = ˆx+ẑ3, A = 1+9 = 3.16, â = A A = ˆx+ẑ3 3.16
2. Οι νόµοι της κίνησης, οι δυνάµεις και οι εξισώσεις κίνησης
 Οι νόµοι της κίνησης, οι δυνάµεις και οι εξισώσεις κίνησης Βιβλιογραφία C Kittel, W D Knight, A Rudeman, A C Helmholz και B J oye, Μηχανική (Πανεπιστηµιακές Εκδόσεις ΕΜΠ, 1998) Κεφ, 3 R Spiegel, Θεωρητική
Οι νόµοι της κίνησης, οι δυνάµεις και οι εξισώσεις κίνησης Βιβλιογραφία C Kittel, W D Knight, A Rudeman, A C Helmholz και B J oye, Μηχανική (Πανεπιστηµιακές Εκδόσεις ΕΜΠ, 1998) Κεφ, 3 R Spiegel, Θεωρητική
ΦΥΣ. 211 Τελική Εξέταση 20-Μάη-2016
 ΦΥΣ. 11 Τελική Εξέταση 0-Μάη-016 Πριν ξεκινήσετε συµπληρώστε τα στοιχεία σας (ονοµατεπώνυµο, αριθµό ταυτότητας) στο πάνω µέρος της σελίδας αυτής. Για τις λύσεις των ασκήσεων θα πρέπει να χρησιµοποιήσετε
ΦΥΣ. 11 Τελική Εξέταση 0-Μάη-016 Πριν ξεκινήσετε συµπληρώστε τα στοιχεία σας (ονοµατεπώνυµο, αριθµό ταυτότητας) στο πάνω µέρος της σελίδας αυτής. Για τις λύσεις των ασκήσεων θα πρέπει να χρησιµοποιήσετε
ˆ ˆŠ Œ ˆ ˆ Œ ƒ Ÿ Œ Œ ˆ ˆ ˆŠ ˆˆ 58. ˆ. Œ. ƒμ É. Œμ ±μ ± μ Ê É Ò É ÉÊÉ Ô² ±É μ ± ³ É ³ É ± (É Ì Î ± Ê É É), Œμ ±
, Œμ ±") ˆ ˆŠ Œ ˆ ˆ Œ ƒ Ÿ 2010.. 41.. 1 Œ ˆ ˆ ˆŠ ˆˆ ƒ ˆ Šˆ š Š ƒ Œ ˆ Š Š Ÿ ˆˆ ˆ. Œ. ƒμ É Œμ ±μ ± μ Ê É Ò É ÉÊÉ Ô² ±É μ ± ³ É ³ É ± (É Ì Î ± Ê É É), Œμ ± ˆ 49 ˆ ˆ Šˆ Šˆ 50 ˆ ˆ Œ ˆ ˆˆ ˆ Š 54 Œ Œ ˆ ˆ ˆŠ ˆˆ 58 ˆ ˆ
ˆ ˆŠ Œ ˆ ˆ Œ ƒ Ÿ 2010.. 41.. 1 Œ ˆ ˆ ˆŠ ˆˆ ƒ ˆ Šˆ š Š ƒ Œ ˆ Š Š Ÿ ˆˆ ˆ. Œ. ƒμ É Œμ ±μ ± μ Ê É Ò É ÉÊÉ Ô² ±É μ ± ³ É ³ É ± (É Ì Î ± Ê É É), Œμ ± ˆ 49 ˆ ˆ Šˆ Šˆ 50 ˆ ˆ Œ ˆ ˆˆ ˆ Š 54 Œ Œ ˆ ˆ ˆŠ ˆˆ 58 ˆ ˆ
M p f(p, q) = (p + q) O(1)
 = (p + q) O(1)") l k M = E, I S = {S,..., S t } E S i = p i {,..., t} S S q S Y E q X S X Y = X Y I X S X Y = X Y I S q S q q p+q p q S q p i O q S pq p i O S 2 p q q p+q p q p+q p fp, q AM S O fp, q p + q p p+q p AM
l k M = E, I S = {S,..., S t } E S i = p i {,..., t} S S q S Y E q X S X Y = X Y I X S X Y = X Y I S q S q q p+q p q S q p i O q S pq p i O S 2 p q q p+q p q p+q p fp, q AM S O fp, q p + q p p+q p AM
 y(t) S x(t) S dy dx E, E E T1 T2 T1 T2 1 T 1 T 2 2 T 2 1 T 2 2 3 T 3 1 T 3 2... V o R R R T V CC P F A P g h V ext V sin 2 S f S t V 1 V 2 V out sin 2 f S t x 1 F k q K x q K k F d F x d V
y(t) S x(t) S dy dx E, E E T1 T2 T1 T2 1 T 1 T 2 2 T 2 1 T 2 2 3 T 3 1 T 3 2... V o R R R T V CC P F A P g h V ext V sin 2 S f S t V 1 V 2 V out sin 2 f S t x 1 F k q K x q K k F d F x d V
Κεφάλαιο 1 Πραγματικοί Αριθμοί 1.1 Σύνολα
 x + = 0 N = {,, 3....}, Z Q, b, b N c, d c, d N + b = c, b = d. N = =. < > P n P (n) P () n = P (n) P (n + ) n n + P (n) n P (n) n P n P (n) P (m) P (n) n m P (n + ) P (n) n m P n P (n) P () P (), P (),...,
x + = 0 N = {,, 3....}, Z Q, b, b N c, d c, d N + b = c, b = d. N = =. < > P n P (n) P () n = P (n) P (n + ) n n + P (n) n P (n) n P n P (n) P (m) P (n) n m P (n + ) P (n) n m P n P (n) P () P (), P (),...,